Изобретение относится к области судостроения и возобновляемой энергетики, в частности, к ветровым установкам морского базирования.
Ветроэнергетика является одной из самых быстро развивающихся отраслей возобновляемой энергетики. Недостатком существующих энергетических ветровых установок являются большие размеры преобразователей энергии воздушного потока, обусловленные низкой плотностью воздуха.
Известен вариант решение проблемы уменьшения размеров преобразователя энергии с помощью парусных энергетических установок (патент РФ №2722760 «Парусная энергетическая установка, преобразующая, преобразующая энергию потоков двух сред»). Парусная энергетическая установка содержит катамаран, к корпусам которого снизу прикреплена крыльчатка гидрогенератора. При движении катамарана в результате действия аэродинамических сил на его паруса возникает обтекающий корпуса катамарана водный поток, который вращает крыльчатку и соединенный с ней электрогенератор. Для передачи вырабатываемой электроэнергии внешнему потребителю электрогенератор соединен с помощью электрического кабеля с буем, закрепленным на морском дне в том месте, куда подведен кабель от внешнего потребителя электроэнергии. Траектория движения катамарана вокруг буя представлена в виде равностороннего треугольника, одна из сторон которого перпендикулярна направлению ветра.
Недостатком предложенного варианта парусной энергетической установки является сложность организации движения катамарана по треугольной траектории вокруг буя при постоянно меняющемся направлении ветра.
Известна парусная энергетическая установка, позволяющая организовать надежное циклическое движение парусного судна по дуговой траектории (патент РФ №2745173). Парусная энергетическая установка содержит симметричный относительно носа и кормы катамаран, к корпусам которого снизу прикреплена крыльчатка гидрогенератора. С помощью электрического кабеля, оснащенного системой поплавков, электрогенератор соединен поворотным контактным устройством, установленным на буе, который закреплен с помощь груза на морском дне в месте подведения электрического кабеля от внешнего потребителя электричества. К грузу также крепится идущий от катамарана удерживающий трос.
Установка работает следующим образом. Катамаран приводится в район нахождения буя, где к нему крепится удерживающий трос, а электрогенератор соединяется с идущим от буя электрическим кабелем. После этого устанавливаются паруса, развернутые под углом 45 градусов к направлению ветра, в результате катамаран начинает двигаться. Поскольку катамаран соединен с удерживающим тросом, то он будет двигаться по дуговой траектории, центром которой является местонахождение груза. На траектории движения катамарана задаются точки, симметричные относительно направления ветра, в которых положение парусов меняется на противоположное симметричное положение. При изменении положения парусов катамаран начинает двигаться в обратную сторону. При движении катамарана образуется обтекающий его водный поток, который вращает крыльчатку и соединенный с ней электрогенератор. Через электрический кабель и установленное на буе поворотное контактное устройство вырабатываемая энергия передается внешнему потребителю электричества.
Недостатком установки является низкая эффективность использования кинетической энергии ветрового потока при движении по дуговой траектории, поскольку на одной ее половине катамаран движется курсом бейдевинд, при котором угол между направлением ветра и направлением движения катамарана составляет менее 90°, что приводит к уменьшении его скорости. Кроме этого скорость катамарана уменьшается также из-за сопротивления, которое оказывает удерживающий трос.
Задачей изобретения является повышение эффективности использования кинетической энергии ветрового потока парусной энергетической установкой путем изменения траектории и организации ее движения.
Технический результат достигается тем, что в парусную энергетическую установку, содержащую симметричный относительно носа и кормы катамаран, на котором установлены мачты с системой изменения положения парусов, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора, соединенного электрическим кабелем с поворотным контактным устройством, установленным на буе, который закреплен с помощью груза на морском дне в месте подведения кабеля от внешнего потребителя электроэнергии, для катамарана вводится область его перемещения в виде круга диаметром D с центром в месте нахождения буя, в которой катамаран движется автоматически курсом галфвинд между путевыми точками T1 и Т2, которые являются точками пересечения перпендикулярной к направлению ветра хорды длинной L с окружностью радиусом R=D/2, для чего на катамаране устанавливаются: датчик скорости и направления ветра, автопилот и система автоматического управления движением катамарана, включающая стационарный приемник GPS и навигационный компьютер, вычисляющий положение путевых точек T1 и Т2 при любом направлении ветра и посылающий сигналы на привод для перемещения руля, а также формирующий сигналы на изменение положения парусов.
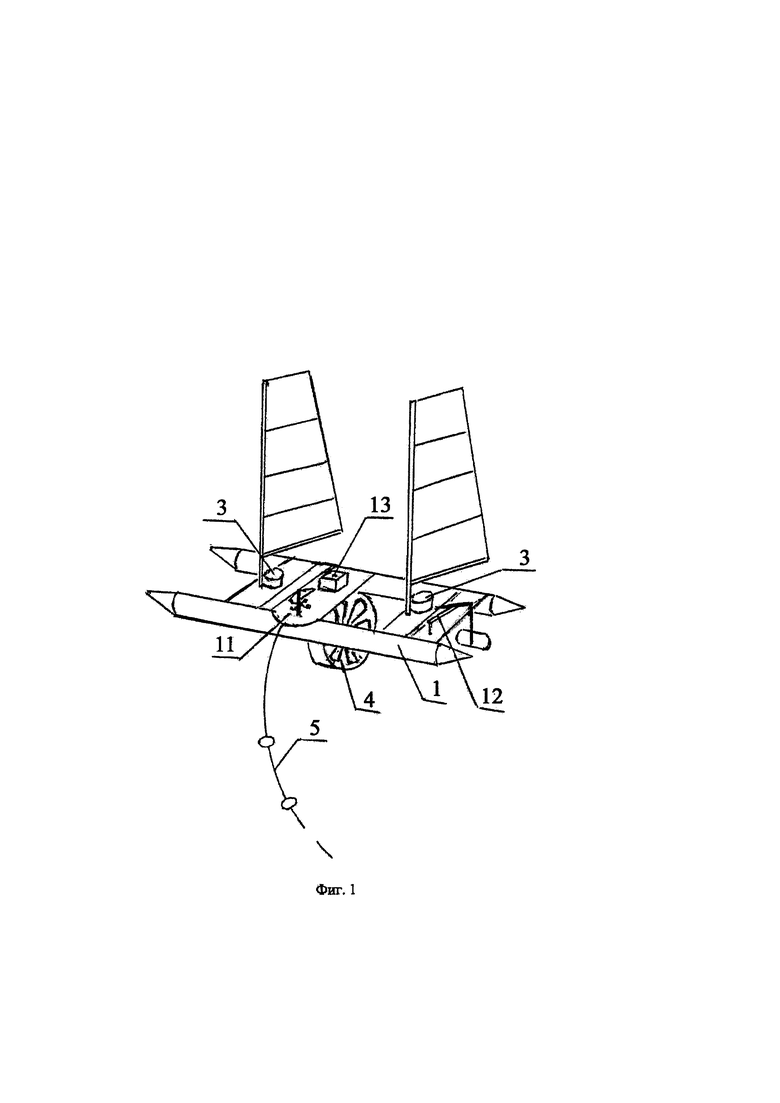
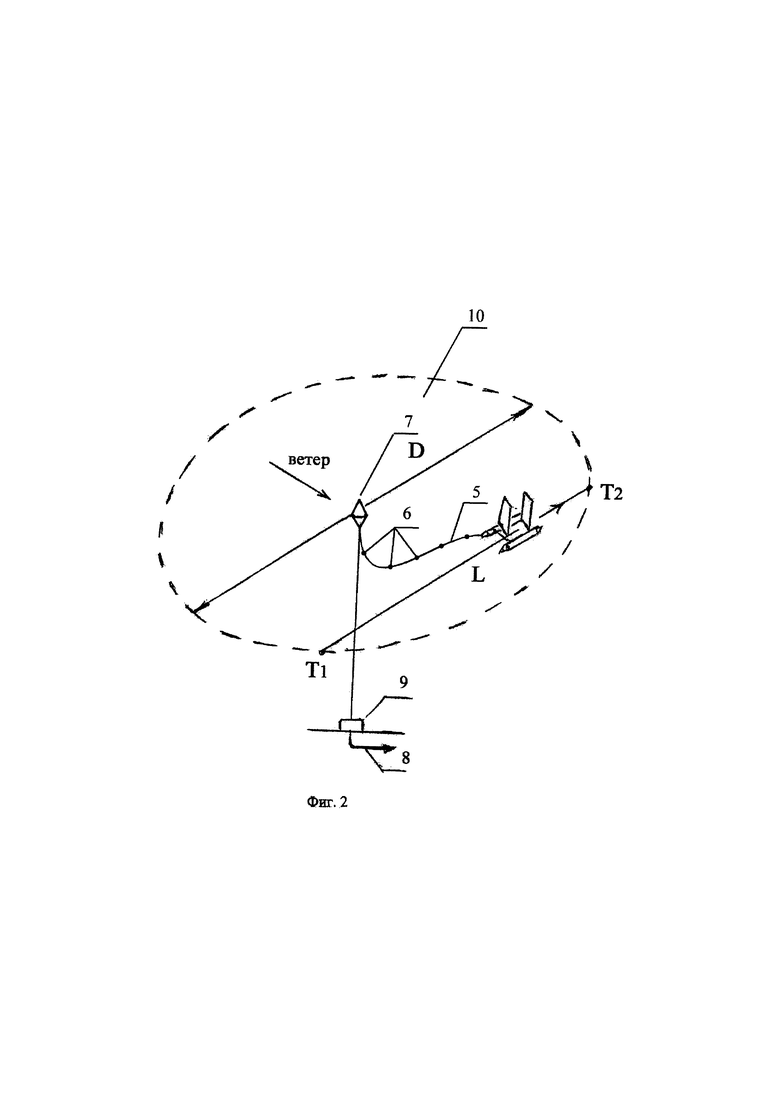
Конструкция парусной энергетической установки и ее работа поясняются схемами, представленными на Фиг. 1 и Фиг. 2. На Фиг. 1 изображен вариант симметричного относительно носа и кормы катамарана 1, в котором оба корпуса выполнены в виде трубы с коническими наконечниками. На катамаране установлены мачты 2 с системой изменения положения парусов 3. Эта система может быть реализована разными способами. Известна система изменения положения парусов с помощью поворота мачт, на которых жестко закреплены реи, как это делается на яхте «Мальтийский сокол» (Maltese Falcon). На парусном судне Green Jet Project управление парусами осуществляется с помощью навигационного компьютера. Снизу к корпусам катамарана крепится крыльчатка 4 гидрогенератора, который, как показано на Фиг. 2, соединен с помощью электрического кабеля 5, снабженного системой поплавков 6, с поворотным контактным устройством, установленным на буе 7. Поворотное контактное устройство соединено с кабелем от внешнего потребителя электроэнергии 8, который расположен в месте крепления буя 7 с помощью груза 9 на морском дне. Для катамарана вводится область его перемещений 10 в виде круга диаметром D с центром в месте нахождения буя 7 (Фиг. 2). В области перемещений 10 катамаран движется автоматически курсом галфвинд между путевыми точками T1 и Т2 при любом направлении ветра. Точки T1 и Т2 являются точками пересечения перпендикулярной направлению ветра хорды длиной L, с окружностью радиусом R=D/2, ограничивающую область перемещений 10 катамарана. Длина хорды определяется длиной электрического кабеля 5, соединяющего гидрогенератор с поворотным контактным устройством, установленным на буе 7. Для нахождения путевых точек T1 и Т2 и организации автоматического движения курсом галфвинд на катамаране 1 устанавливается (Фиг 1) датчик скорости и направления ветра 11, автопилот 12, который может быть выполнен в виде румпельного автопилота, а также система управления автоматическим движением катамарана 13, включающая стационарный приемник GPS (типа Garmin GPS 120) и навигационный компьютер, вычисляющий положение путевых точек T1 и Т2 при любом направлении ветра и посылающий сигналы на привод для перемещения руля, а также формирующий сигналы на изменение положения парусов в путевых точках T1 и Т2.
Установка работает следующим образом. Катамаран приводится в область его перемещений 10, где идущий от буя 7 электрический кабель 5 подключается к гидрогенератору и включается система автоматического управления движением катамарана 13. По показаниям датчика скорости и направления ветра 11 и показаниям приемника GPS навигационным компьютером определяется направление истинного ветра и координаты путевых точек T1 и Т2. После этого катамаран приводят в ближайшую путевую точку, например, точку T1, разворачивают его так, чтобы его диаметральная плоскость была приблизительно направлена на путевую точку Т2, устанавливают паруса под углом 45 градусов к диаметральной плоскости, и катамаран отпускают. Под действием аэродинамических сил и в результате автоматического управления, катамаран начинает двигаться курсом галфвинд к точке Т2. Когда катамаран придет в точку Т2 с навигационного компьютера системы автоматического управления движением катамарана 13 на систему изменения положения парусов поступит сигнал на изменение положения парусов и паруса повернутся на 90° после чего катамаран начнет двигаться в обратном направлении.
При движении катамарана образуется обтекающий его водный поток, который вращает крыльчатку генератора, вырабатывающего электричество. Через электрический кабель 5 и установленное на буе 7 поворотное контактное устройство вырабатываемое гидрогенератором электричество передается внешнему потребителю энергии.
Для проверки работоспособности предлагаемой конструкции парусной энергетической установки с автоматической системой управления ее движением были проведены исследования на экспериментальной установке, включающей бассейн, генератор ветрового потока и макет катамарана, симметричного относительно носа и кормы, на котором была установлена система изменения положения парусов. Система автоматического управления движением катамарана имитировалась с помощью радиосигналов, поступающих с пульта на сервопривод рулевого управления. Поворот парусов осуществлялся в результате поворота мачт, на которых были жестко закреплены паруса. На мачтах были установлены шестеренки, которые поворачивались с помощью электромотора с редуктором на угол 90 градусов. Сигнал на изменение положения парусов также подавался с пульта радиоуправления. Эксперименты показали работоспособность предлагаемой конструкции парусной энергетической установки с автоматической системой управления ее движением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С СИСТЕМОЙ ЖЕСТКИХ ПАРУСОВ | 2023 |
|
RU2814122C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ПОДВОДНЫМ ДРОНОМ ДЛЯ НЕПРЕРЫВНОГО МОНИТОРИНГА ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2024 |
|
RU2830193C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2745173C1 |
| АВТОНОМНАЯ ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2022 |
|
RU2785592C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ЭСТАКАДОЙ С МАЧТАМИ | 2024 |
|
RU2835550C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ПРЕОБРАЗУЮЩАЯ ЭНЕРГИЮ ПОТОКОВ ДВУХ СРЕД | 2019 |
|
RU2722760C1 |
| ПАРУСНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2023 |
|
RU2806704C1 |
| ПОДВЕСНАЯ ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2023 |
|
RU2817457C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА НАЗЕМНОГО БАЗИРОВАНИЯ | 2023 |
|
RU2826961C1 |
| МОРСКОЙ ПАРОМ | 2002 |
|
RU2276645C2 |
Изобретение относится к области судостроения и возобновляемой энергетике, в частности, к ветровым энергоустановкам морского базирования. Парусная энергетическая установка содержит симметричный относительно носа и кормы катамаран, на котором установлены мачты с системой изменения положения парусов, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора, соединенного электрическим кабелем с поворотным контактным устройством, установленным на буе, закрепленном с помощью груза на морском дне в месте подведения кабеля от внешнего потребителя электроэнергии. Для катамарана вводится область его перемещений в виде круга диаметром D с центром в месте расположения буя, в которой катамаран движется автоматически курсом галфвинд. На катамаране устанавливаются датчик скорости и направления ветра, автопилот и система автоматического управления движением. Достигается повышение эффективности использования кинетической энергии ветра парусной энергетической установкой путем изменения траектории и организации ее движения. 2 ил.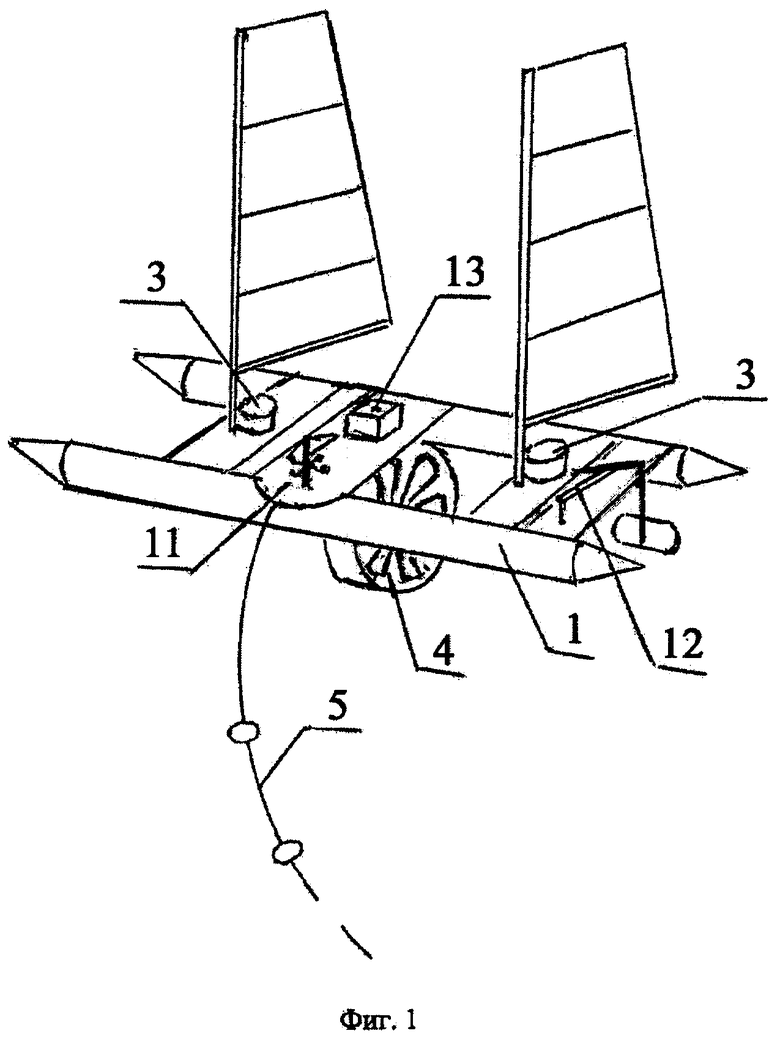
Парусная энергетическая установка, содержащая симметричный относительно носа и кормы катамаран, на котором установлены мачты с системой изменения положения парусов, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора, соединенного электрическим кабелем с поворотным контактным устройством, установленным на буе, закрепленном с помощью груза на морском дне в месте подведения кабеля от внешнего потребителя электроэнергии, отличающаяся тем, что для катамарана вводится область его перемещений в виде круга диаметром D с центром в месте расположения буя, в которой катамаран движется автоматически курсом галфвинд между путевыми точками T1 и Т2, которые являются точками пересечения перпендикулярной к направлению ветра хорды длиной L с окружностью радиусом R=D/2, для чего на катамаране устанавливаются датчик скорости и направления ветра, автопилот и система автоматического управления движением катамарана, включающая стационарный приемник GPS и навигационный компьютер, вычисляющий положение путевых точек T1 и Т2 при любом направлении ветра и посылающий сигналы на привод для перемещения руля, а также формирующий сигналы на изменение положения парусов.
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2745173C1 |
| DE 19727330 A1, 07.01.1999 | |||
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ПРЕОБРАЗУЮЩАЯ ЭНЕРГИЮ ПОТОКОВ ДВУХ СРЕД | 2019 |
|
RU2722760C1 |
| JP 56146075 A, 13.11.1981. | |||

