Изобретение относится к области судостроения, возобновляемой энергетики и морских исследований, в частности к мониторингу подводных объектов.
Известно большое количество установок с дронами для мониторинга подводных объектов. Конструкция одной из таких установок приведена в патенте РФ 210112. Она содержит надводную часть, выполненную в виде тримарана с подводным дроном, который закреплен на леске, намотанной на лебедку, установленную на тримаране, и может подниматься или опускаться с помощью лебедки. С леской с помощью системы зажимов из хомутов соединен идущий от дрона кабель-канал, который используется для передачи сигналов. При подъеме дрона леска наматывается на лебедку, а кабель-канал складывается на леске между зажимами. Перемещение дрона в горизонтальной плоскости осуществляется в результате перемещения тримарана, для чего на нем установлены два двигателя и рулевое устройство. Управление перемещением тримарана осуществляется дистанционно. Для работы установки на тримаране размещена соответствующая аппаратура и автономный источник питания.
Недостатком конструкции установки является невозможность непрерывного мониторинга подводных объектов из-за ограниченной емкости автономного источника питания.
Известна парусная энергетическая установка, которую можно использовать в качестве внешнего источника питания подводного дрона для непрерывного мониторинга исследуемых объектов (патент РФ №2779605). Она содержит симметричный относительно носа и кормы катамаран, на котором установлены мачты с системой изменения положения парусов, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора, соединенного электрическим кабелем с буем, который закреплен с помощью груза на морском дне в месте подведения кабеля от внешнего потребителя электроэнергии. Для катамарана вводится область его перемещения в виде круга диаметром D с центром в месте нахождения буя, в которой катамаран движется автоматически курсом галфвинд между путевыми точками T1 и Т2, которые являются точками пересечения перпендикулярной к направлению ветра хорды длинной L с окружностью радиуса R=D/2, для чего на катамаране устанавливается датчик скорости и направления ветра, автопилот и система автоматического управления движением катамарана, включающая стационарный приемник GPS и навигационный компьютер, вычисляющий положение путевых точек T1 и Т2 при любом направлении ветра и формирующий сигналы для автопилота, а также формирующий сигналы на изменение положения парусов на 90° в точках T1 и Т2. Если данную конструкцию парусной установки использовать в качестве источника питания подводного дрона, то с помощью такой конструкции можно производить непрерывный мониторинг подводных объектов.
Недостатком предложенной конструкции парусной энергетической установки как источника питания является узость области ее использования, в частности, ее нельзя использования для непрерывного мониторинга с помощью подводного дрона перемещающихся объектов.
Задачей изобретения является расширение области использования парусных энергетических установок, в частности, возможность их использования как источника электропитания для мониторинга с помощью подводного дрона перемещающихся объектов.
Технический результат достигается тем, что парусная энергетическая установка, содержащая симметричный относительно носа и кормы катамаран, на котором установлены паруса с системой изменения их углового положения, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора. Катамаран перемещается внутри круга диаметром D, в которой при любом направлении ветра он движется курсом галфвинд между путевыми точками T1 и Т2, являющимися точками пересечения диаметра круга с ограничивающей его окружностью, используется как внешний источник питания подводного дрона, соединенного с гидрогенератором кабелем с нейтральной плавучестью и намотанным на электрическую лебедку кабелем с тросом, к концу которого прикреплен груз. Управление дроном осуществляется через проводную систему кабеля с тросом, по которому на дрон подается электропитание. В процессе мониторинга положение центра круга перемещений катамарана совпадает по вертикали с объектом исследований, положение которого определяется с помощью установленного на катамаране гидролокатора. Управление движением катамарана осуществляется с помощью установленной на катамаране навигационной системы, включающей датчик направления ветра, компьютер, систему GPS и автопилот с рулевым устройством. Сигналы от установленной на дроне видеокамеры и измерительной системы по проводной системе поступают на передатчик сигналов дрона, а оттуда в исследовательский центр для регистрации и внесения коррекции в программу мониторинга.
Использование парусной энергетической установки в качестве внешнего источника питания подводного дрона и организация автоматического движения катамарана позволяет осуществлять непрерывный мониторинг перемещающихся объектов. Система погружения дрона и организация его перемещений с помощью проводной системы снимает ограничения с глубины погружения объекта мониторинга.
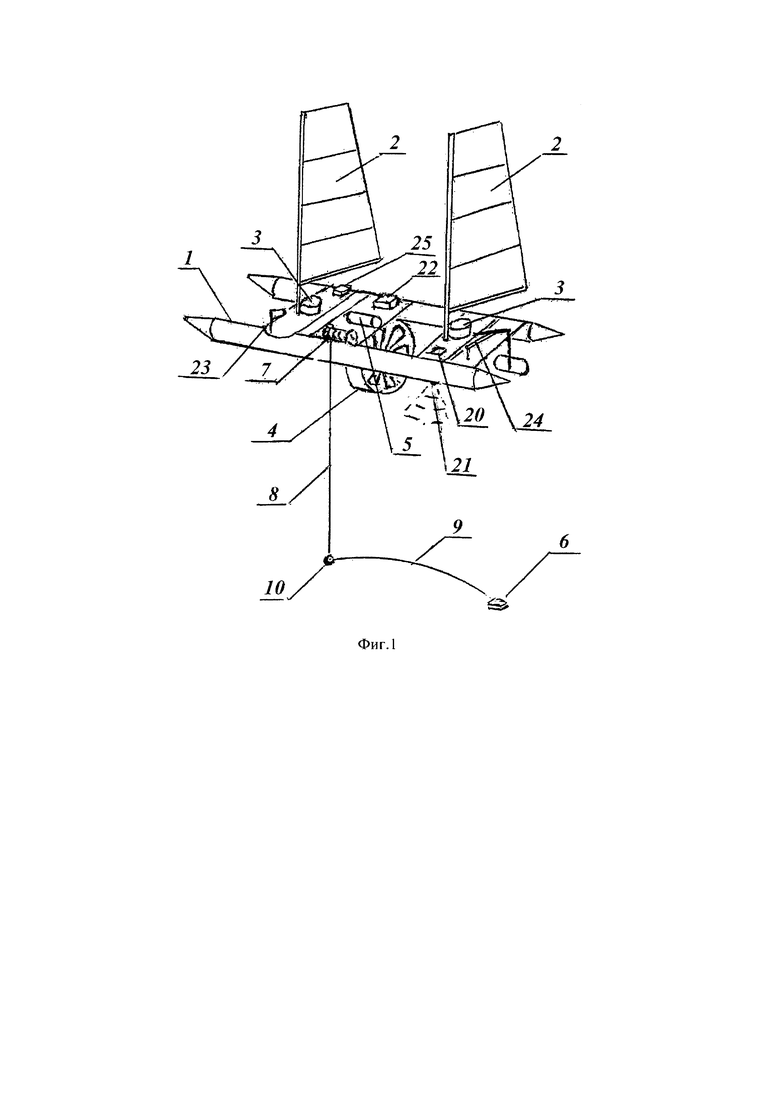
Конструкция парусной энергетической установки и ее работа поясняются схемами, представленными на Фиг. 1-3. На Фиг. 1 изображен вариант симметричного относительно носа и кормы катамарана 1, в котором оба корпуса выполнены в виде трубы с коническими наконечниками. На катамаране установлены мачты с закрепленными на них парусами 2, положение которых регулируется системой изменения углового положения парусов 3. Снизу к корпусам катамарана 1 крепится крыльчатка 4 гидрогенератора 5, который соединен с подводным дроном 6 кабелем с тросом 8, намотанным на электрическую лебедку 7, и кабелем с нейтральной плавучестью 9. В месте их соединения к кабелю с тросом 8 подвешен груз 10. В качестве подводного дрона 1 можно использовать, например, профессиональный подводный дрон Chasing М2, снабженный 8 моторами, обеспечивающими его перемещение в пространстве во всех направлениях. Дрон имеет систему питания от внешнего источника, на нем установлена видеокамера и датчики измерения параметров морской среды.
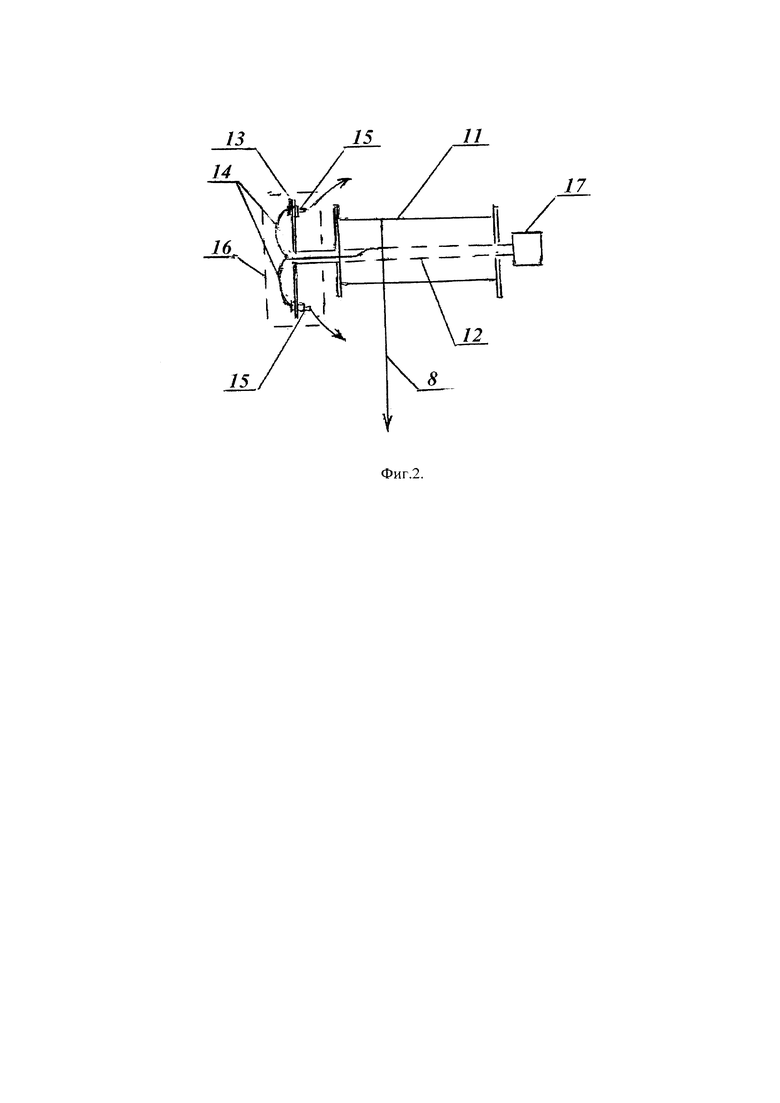
Глубина погружения дрона 6 регулируется с помощью электрической лебедки 7, устройство барабана которой представлено на Фиг. 2. Барабан 11 лебедки 7 вращается на оси 12, выполненной в виде трубы, на одном конце которой закреплен контактный диск 13 с радиальными металлическими полосами. На барабан 11 намотан кабель с тросом 8, закрепленный конец которого пропущен через ось 12. Выходящие из конца оси 12 провода 14 кабеля 8 соединены с радиальными полосами контактного диска 12. К радиальным полосам с помощью контактных устройств 15, аналогичных щеткам мотора постоянного тока, подключаются провода электрогенератора 5. На схеме показано контактное соединение только двух проводов, содержащихся в кабеле с тросом 8. Другие содержащиеся в нем провода также соединяются с соответствующей аппаратурой с помощью контактного диска 13. Контактный диск 12 закрыт герметическим кожухом 16. Барабан 11 вращается с помощью мотора 17.
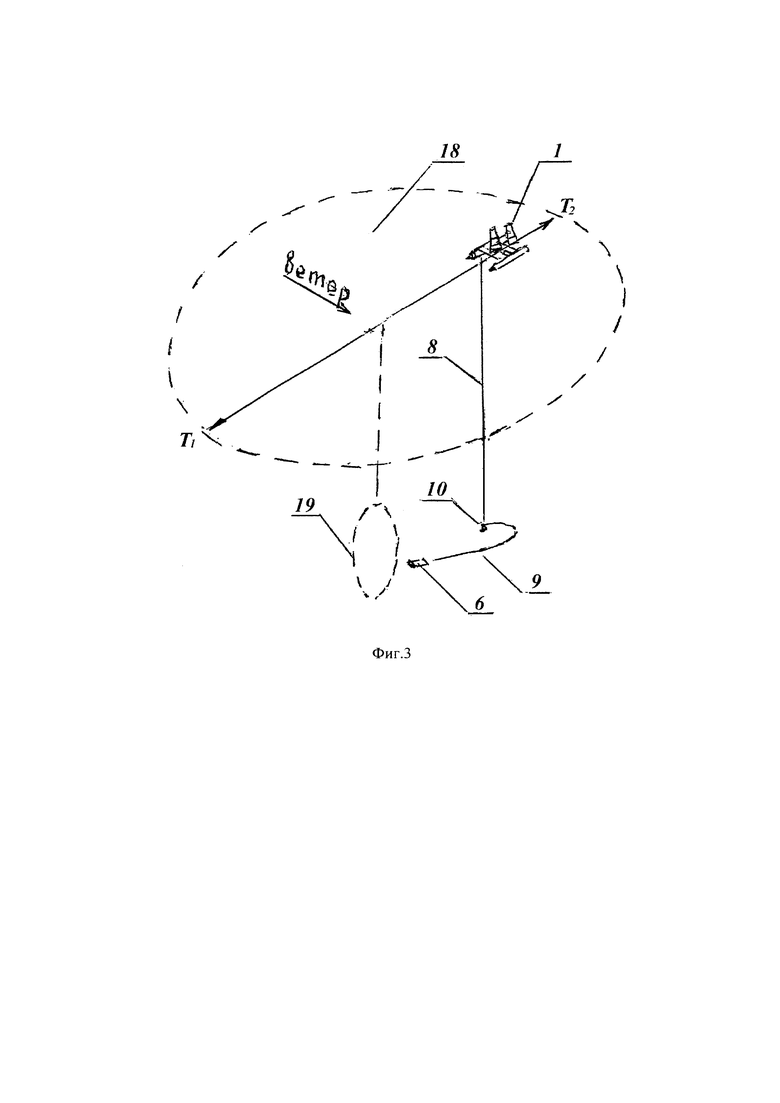
На Фиг. 3 показана общая схема парусной энергетической установки с подводным дроном. Для катамарана 1 вводится область его перемещений 18 в виде круга диаметром D с центром в месте нахождения объекта наблюдения 19. Место нахождения объекта 19 определяется с помощью гидролокатора 20, источник акустических сигналов которого 21 крепится снизу на одном из корпусов катамарана 1 (Фиг. 1). В области перемещений 18 катамаран движется автоматически курсом галфвинд между путевыми точками T1 и Т2 при любом направлении ветра. Точки T1 и Т2 являются точками пересечения перпендикулярного направлению ветра диаметра круга D с ограничивающей его окружностью. Положение центра круга перемещений, путевых точек T1 и Т2, организация движения катамарана 1 осуществляется с помощью установленной на катамаране навигационной системы 22, в состав которой входят компьютер, система GPS, датчик направления ветра 23 и автопилот с рулевым устройством 24. Сигналы от установленных на дроне видеокамеры и измерительной системы по проводам кабеля с нейтральной плавучестью 9 и кабеля с тросом 8 посту на передающую систему 25 а оттуда в исследовательский центр для регистрации и внесения коррекции в программу исследований.
Установка работает следующим образом. Катамаран 1 с подводным дроном 6 доставляется в область его перемещений 18 судном, на котором установлен гидролокатор. Когда с помощью гидролокатора обнаруживается объект мониторинга 19, катамаран 1 спускают на воду и включают установленную на катамаране аппаратуру, обеспечивающую работу установки. С помощью датчика 21 определяется направление ветра и по этим данным компьютером рассчитывается положение путевых точек T1 и Т2 для того, чтобы катамаран двигался кусом, перпендикулярным направлению ветра. После этого катамаран приводят в ближайшую путевую точку, например, в точку T1 и разворачивают так, чтобы его диаметральная плоскость была приблизительно направлена на путевую точку Т2, после чего катамаран отпускают. Под действием аэродинамических сил катамаран начинает двигаться курсом, галфвинд к точке Т2. Когда катамаран придет в точку Т2 паруса 2 системой изменения углового положение парусов 3 разворачиваются на 90° и катамаран начнет двигаться в обратном направлении. При движении катамарана образуется обтекающий его водный поток, который вращает крыльчатку 4 гидрогенератора 5, вырабатывающего электроэнергию. В течение некоторого временного интервала, катамаран с помощью автопилота с рулевым устройством 24 и системы изменения углового положения парусов 3 совершает циклические движения между точками T1 и Т2, осуществляя определение положения объекта наблюдения 19 с помощью гидролокатора 20. По полученным данным о положении объекта наблюдения 19 определяется глубина его нахождения и скорость перемещения. Эти данные вводятся в навигационную систему 22 для задания положения центра круга перемещений катамарана и траектории его движения. После этого дрон 6 с помощью лебедки 7 опускается на глубину нахождения объекта наблюдений 19 и устанавливается в положение, необходимое для мониторинга. После этих операций парусная энергетическая установка с подводным дроном оказывается в рабочем состоянии и начинается непрерывный мониторинг перемещающегося объекта. Центр перемещений катамарана с помощью навигационной системы удерживается на вертикале, проходящей через объект наблюдения. В процессе мониторинга, в результате циклических движений катамарана в области перемещений, с помощью электрогенератора 5 вырабатывается электроэнергия, необходимая для работы дрона и аппаратуры, установленной на катамаране. При изменении глубины положения объекта наблюдения с помощью электрической лебедки 7 меняется глубина погружения дрога 6. Получаемые в процессе мониторинга данные с установленных на дроне видеокамеры и измерительной системы по проводной системе поступают на передатчик сигналов дрона, а оттуда в исследовательский центр для регистрации и внесения коррекции в программу мониторинга.
Перемещающимся объектом, удобным для непрерывного мониторинга с помощью предложенной конструкции установки, являются косяки рыб. Косяки большинства видов рыб перемещаются с небольшой скоростью (Юдович Ю.Б. «Промысловая разведка рыб»). Так, косяки сайры перемещаются со скоростью 2-2,5 узла, а косяки сардины со скоростью 2,2 узла. Во время зимовки косяки передвигаются медленно, подолгу оставаясь на одном месте. При сезонных миграциях косяки рыб, например, тунцов, движутся со скоростью 8-9 миль в сутки. Многие виды придонных рыб совершают горизонтальную миграцию, переходя с глубоких участков на более мелкие. Приведенные примеры перемещений косяков рыб показывают, что предложенная конструкция парусной энергетической установки с подводным дроном позволяет производить непрерывный мониторинг передвигающихся объектов, в частности, косяков рыб.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С АВТОМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ЕЁ ДВИЖЕНИЕМ | 2022 |
|
RU2779605C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С СИСТЕМОЙ ЖЕСТКИХ ПАРУСОВ | 2023 |
|
RU2814122C1 |
| АВТОНОМНАЯ ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2022 |
|
RU2785592C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2745173C1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ПРЕОБРАЗУЮЩАЯ ЭНЕРГИЮ ПОТОКОВ ДВУХ СРЕД | 2019 |
|
RU2722760C1 |
| МОРСКОЙ ПАРОМ | 2002 |
|
RU2276645C2 |
| САМОХОДНАЯ ПОЛУПОГРУЖНАЯ ОКЕАНОЛОГИЧЕСКАЯ ИССЛЕДОВАТЕЛЬСКАЯ ПЛАТФОРМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2343084C2 |
| ПАРУСНЫЙ КАТАМАРАН | 1993 |
|
RU2043244C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2022 |
|
RU2804744C1 |
| Парусный катамаран | 1986 |
|
SU1418177A1 |
Изобретение относится к области судостроения, возобновляемой энергетике и морских исследований, в частности к мониторингу подводных объектов. Парусная энергетическая установка содержит симметричный относительно носа и кормы катамаран, на котором установлены паруса с системой изменения их углового положения, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора. Катамаран выполнен с возможностью перемещения внутри круга диаметром D, в котором при любом направлении ветра катамаран движется курсом галфвинд между путевыми точками T1 и Т2, являющимися точками пересечения диаметра круга с ограничивающей его окружностью. Энергетическая установка используется как источник внешнего питания подводного дрона, соединенного с гидрогенератором кабелем с нейтральной плавучестью и намотанным на электрическую лебедку кабелем с тросом, один конец которого соединен с проводной системой, а к другому концу прикреплен груз для фиксации конца кабеля с тросом в области мониторинга объекта наблюдения, положение которого определяется с помощью гидролокатора. Центр круга перемещений катамарана по вертикали проходит через объект наблюдений. Достигается повышение эффективности использования кинетической энергии ветра парусной энергетической установкой путем установки системы жестких парусов с изменяющимся профилем. 2 з.п. ф-лы, 3 ил.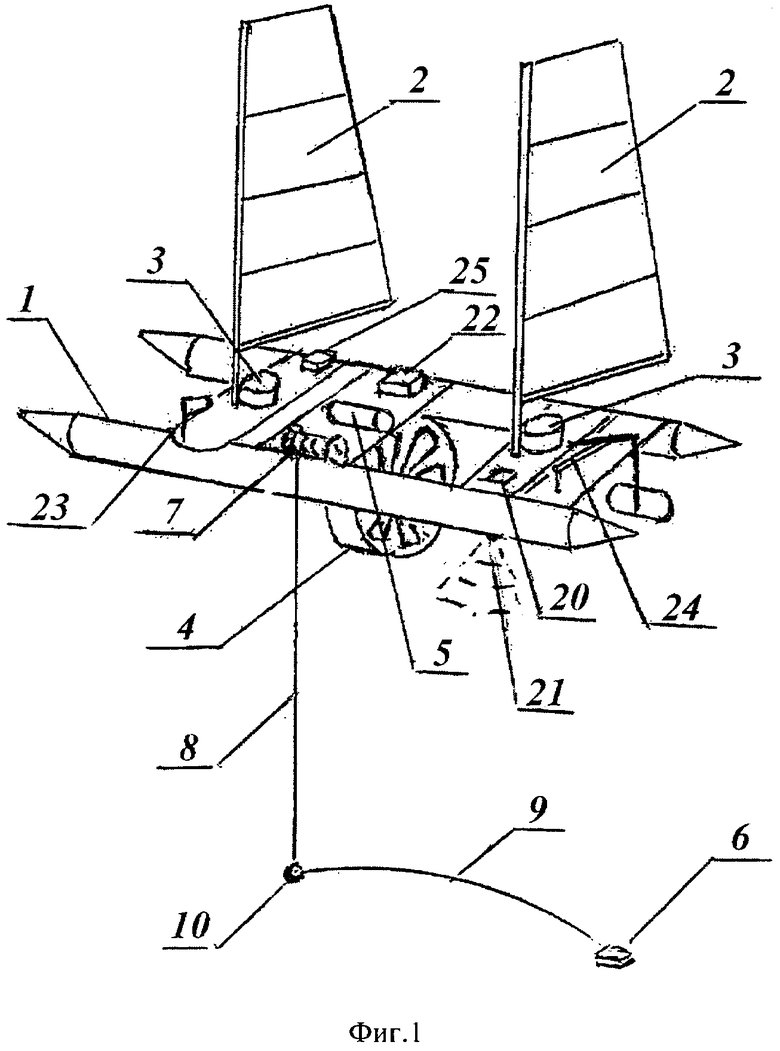
1. Парусная энергетическая установка, содержащая симметричный относительно носа и кормы катамаран, на котором установлены паруса с системой изменения их углового положения, а снизу к корпусам катамарана прикреплена крыльчатка гидрогенератора, а сам катамаран выполнен с возможностью перемещения внутри круга диаметром D, в котором при любом направлении ветра катамаран движется курсом галфвинд между путевыми точками T1 и Т2, являющимися точками пересечения диаметра круга с ограничивающей его окружностью, отличающаяся тем, что энергетическая установка используется как источник внешнего питания подводного дрона, соединенного с гидрогенератором кабелем с нейтральной плавучестью и намотанным на электрическую лебедку кабелем с тросом, один конец которого соединен с проводной системой, а к другому концу прикреплен груз для фиксации конца кабеля с тросом в области мониторинга объекта наблюдения, положение которого определяется с помощью гидролокатора, при этом центр круга перемещений катамарана по вертикали проходит через объект наблюдений.
2. Парусная энергетическая установка по п.1, отличающаяся тем, что управление перемещениями дрона осуществляется через кабель с тросом и проводную систему, по которой на дрон также подается электропитание, включающую радиальные контактные устройства, закрепленные на одном конце оси барабана лебедки, выполненной в виде трубы, внутрь которой вставлен конец кабеля с тросом, соединенный с радиальными контактными устройствами.
3. Парусная энергетическая установка по п.1, отличающаяся тем, что сигналы с установленной на дроне видеокамеры и измерительной системы, по кабелю с тросом и проводной системе поступают на передатчик сигналов дрона, а оттуда в исследовательский центр для регистрации и внесения коррекций в программу мониторинга.
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С АВТОМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ЕЁ ДВИЖЕНИЕМ | 2022 |
|
RU2779605C1 |
| СПОСОБ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ | 0 |
|
SU206765A1 |
| JP 2019089422 A, 13.06.2019 | |||
| АППАРАТ ДЛЯ АКТИВАЦИИ УГЛЯ | 0 |
|
SU210112A1 |
| ПАРУСНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2020 |
|
RU2745173C1 |
| JP 56146075 A, 13.11.1981 | |||
| DE 19727330 A1, 07.01.1999. | |||

