Изобретение относится к области судостроения и касается средств повышения курсовой устойчивости судов.
Известен корпус судна, содержащий обшивку, подкрепленную набором со шпангоутами эллиптической формы, причем площади шпангоутов, равноудаленных от мидель-шпангоута, равны между собой, что позволило уменьшить волновое сопротивление судна (SU 816859, МПК В63В 1/06, опубл. 30.03.1981 г.).
Недостатком данного корпуса судна является то, что на попутном волнении возможно возникновение явления брочинга. Вследствие резкого изменения скорости обтекания корпуса судна при переходе с подошвы волны на вершину (фиг. 1, фиг. 2, фиг. 3), за счет уменьшения буксировочного сопротивления судно начинает разгоняться (фиг. 4), а при спуске с вершины на передний склон волны носовая оконечность начинает обтекаться потоком с большей скоростью, что ведет к ее затормаживанию. В таком состоянии судно, находясь на границе устойчивости движения, получает случайное возмущение и резко разворачивается лагом к волне, что может привести к опрокидыванию (Чижиумов С.Д. Основы динамики судов на волнении: учеб. пособие. - Комсомольск-на-Амуре: ГОУ ВПО «КнАГТУ», 2010. - С. 106-108.).
Известно якорное устройство (SU 463581, МПК В63В 21/48, опубл. 15.03.1975 г.), содержащее несколько якорей-парашютов, выполненных из эластичной оболочки со стропами, прикрепленными к буксирному тросу, причем якоря-парашюты закреплены последовательно на некотором расстоянии один от другого на одном тросе.
К недостаткам данного якорного устройства относится то, что его невозможно использовать для предотвращения разворота судна лагом к волне и его опрокидывания в условия брочинга, т.к. для установки и раскрытия якоря требуется значительное время, а процесс неконтролируемого разворота судна лагом к волне происходит очень быстро, в результате чего у судоводителя не будет даже времени на принятие соответствующего решения и подачу команды на спуск якорного устройства на воду.
Известна система предотвращения брочинга (RU 2620849, МПК В63В 43/02, В63В 39/06, В63Н 25/44, опубл. 30.05.2017 г.), содержащая крылья-стабилизаторы, закрепленные на корпусе судна. Корпус выполнен с выемками на носовой оконечности под крылья-стабилизаторы, закрепленные в выемке со стороны носа судна с возможностью поворота относительно вертикальной оси, причем каждая выемка снабжена упругим элементом, жесткость которого выбрана такой, что обеспечивает отклонение крыла-стабилизатора от корпуса при условии, что скорость судна относительно потока воды меньше заданной величины.
Недостатком данной системы предотвращения брочинга является то, что крылья-стабилизаторы установлены в носовой оконечности судна, поэтому при приближении носовой оконечности судна к подошве волны, где скорость частиц в волне может быть направлена против направления движения судна (фиг. 2), крылья-стабилизаторы могут не открыться, в результате чего в условиях попутного волнения судно может быть развернуто лагом к волне и опрокинуто.
В качестве ближайшего аналога принят плавучий якорь, содержащий оболочку из гибкого материала, складной каркас, соединенный одним концом с буем, другим - с отвесом, при этом складной каркас прикреплен стропами к буксирной тяге, и механизм складывания каркаса и оболочки, имеющий оттяжку. С целью расширения эксплуатационных возможностей путем использования якоря в качестве руля для управления направлением дрейфа и повышения надежности якоря, оболочка выполнена с каналами, которые соединены между собой продольными перепонками и выполнены с закрепленными на их боковых сторонах продольными стенками, соединенными со стропами. Якорь снабжен траверсой с размещенными вдоль нее узлами крепления строп, соединенной своими концами с буксирной тягой, и узлом управления, а складной каркас выполнен в виде шарнирного многократного параллелограмма, последовательно окантовывающего своими звеньями все входные отверстия каналов оболочки (SU 1358295, МПК В63В 21/48, опубл. 27.10.2004 г.).
Существенным недостатком данного плавучего якоря является то, что он не включается в работу в случае разворота судна в горизонтальной плоскости при резком смещении кормовой оконечности в боковом направлении, что имеет место в случае брочинга (Чижиумов С.Д. Основы динамики судов на волнении: учеб. пособие. - Комсомольск-на-Амуре: ГОУ ВПО «КнАГТУ», 2010. - С. 106-108.). В результате этого судно на попутном волнении может стать неустойчивым на курсе, развернуться лагом к волне и перевернуться. Возникновение данного явления связано с изменением скорости обтекания корпуса при его попадании на вершину волны и дальнейшем переходе на ее передний склон (фиг. 1 и фиг. 2). На вершине волны происходит резкое снижение буксировочного сопротивления судна (фиг. 4), в результате чего оно начинает разгоняться. После попадания на передний склон скорость обтекания изменяется, поступательное движение судна начинает замедляться. Данный процесс является неустановившимся, кроме того, из-за нестационарности потока воды в диске винта его упор непрерывно изменяется, что отражается на динамике судна. Т.к. данная ситуация развивается стремительно, то судоводитель не в состоянии принять правильное решение и осуществить управление плавучим якорем известной конструкции для корректировки режима движения судна. В результате судно, находясь на переднем склоне волны, может быть развернуто относительно первоначального направления движения, при этом создаются предпосылки переворота судна под действием опрокидывающего момента, образующегося за счет разницы гидродинамических давлений на борта.
Изобретение решает задачу повышения безопасности мореплавания, исключая возникновение брочинга, за счет обеспечения автоматического реагирования системы на резкое смещение кормовой оконечности судна в боковом направлении и создания условий для возникновения сил противодействующих смещению и способствующих возвращению судна в первоначальное положение.
Для получения необходимого технического результата в системе предотвращения брочинга, включающей плавучий якорь, содержащий оболочку из гибкого материала, связанную со складным каркасом, прикрепленным к буксирной тяге и бую, механизм складывания/раскладывания каркаса и оболочки, предлагается механизм складывания/раскладывания каркаса и оболочки оснастить управляющими тросами, которые закрепить на корме судна по обе стороны от буксирной тяги, и посредством муфты связать с центральной управляющей тягой якоря, которую, при помощи строп предлагается связать с ребрами жесткости складного каркаса.
В предлагаемом техническом решении в случае начала разворота судна в горизонтальной плоскости на попутном волнении происходит натяжение одного из тросов управляющих (при смещении кормы вправо вытягивается правый трос, при смещении кормы влево - левый), перемещение центральной управляющей тяги плавучего якоря к корпусу судна и раскрытие складного каркаса и оболочки из гибкого материала, благодаря чему создается гидродинамическая сила, действующая в районе кормовой оконечности судна в направлении, противоположном первоначальному направлению движения судна, в результате повышается устойчивость судна на курсе и исключается возможность его разворота лагом к волне и опрокидывания.
На прилагаемых графических материалах изображено:
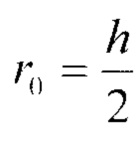
на фиг. 1 - профиль ветровой волны;
на фиг. 2 - изменение горизонтальной составляющей скорости поверхностных частиц по длине волны:
на фиг. 3 - траектория частиц в ветровой волне;
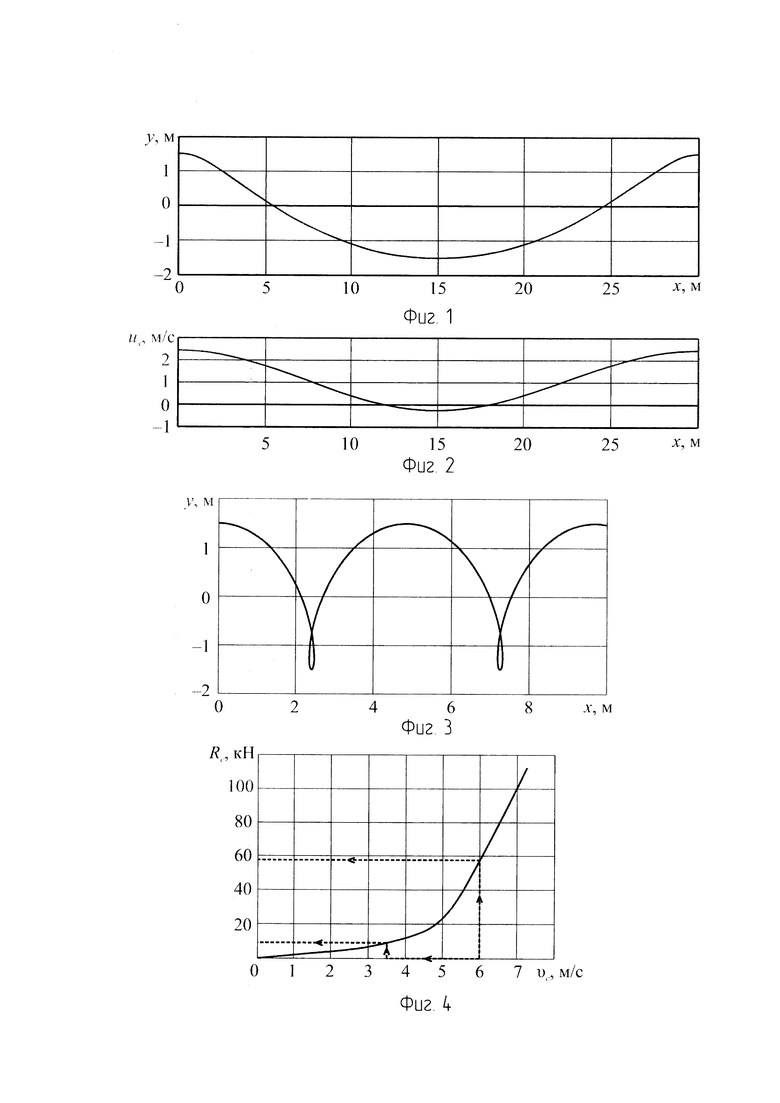
на фиг. 4 - кривая буксировочного сопротивления судна;
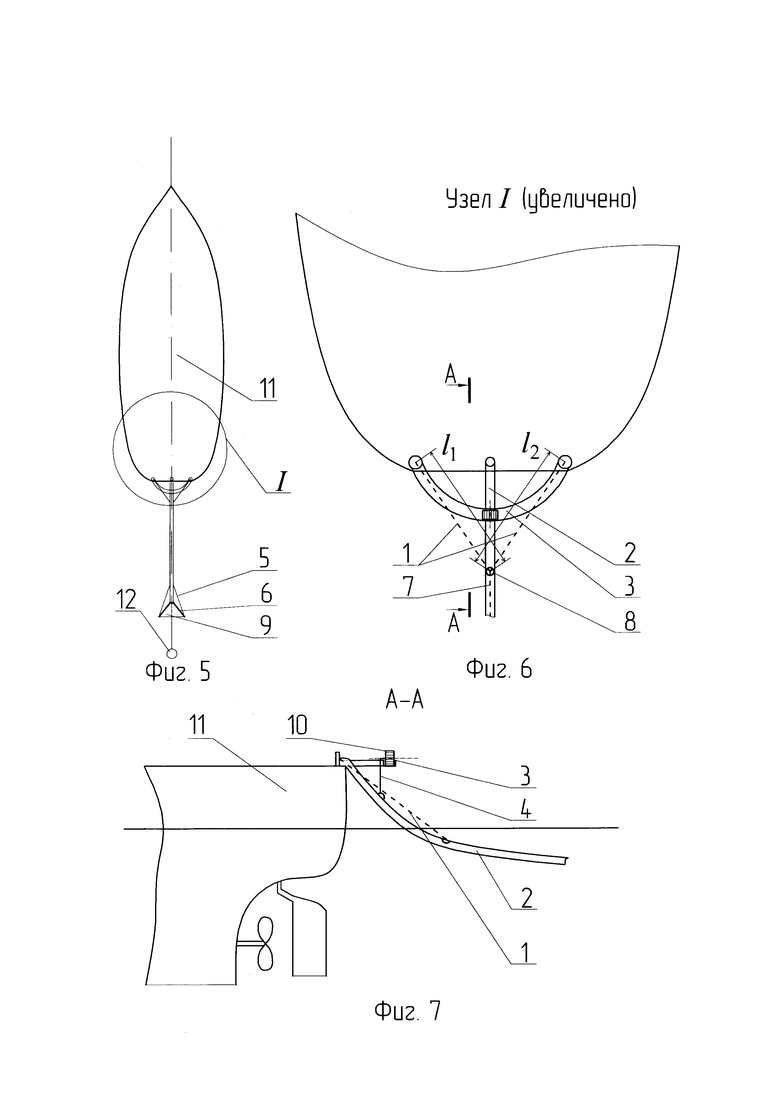
на фиг. 5 - судно с установленной системой предотвращения брочинга;
на фиг. 6 - узел I на фиг. 5;
на фиг. 7 - разрез А-А на фиг. 6.
На графических материалах приняты следующие обозначения:
1 - трос управляющий;
2 - тяга буксирная;
3 - дуга направляющая;
4 - скоба поддержки тяги буксирной;
5 - стропы;
6 - ребра жесткости плавучего якоря;
7 - тяга центральная управляющая плавучего якоря;
8 - муфта крепления тросов управляющих;
9 - оболочка из гибкого материала;
10 - ролик;
11 - корпус судна;
12 - буй;
 ,
, - длина троса управляющего по левому и правому борту соответственно, м;
- длина троса управляющего по левому и правому борту соответственно, м;
х - горизонтальная координатная ось, м;
у - вертикальная координатная ось, м;
ux - горизонтальная составляющая скорости частиц в волне, м/с;
υc - скорость судна, м/с;
Rс - буксировочное сопротивление судна, кН.
Конструкция системы предотвращения брочинга состоит из плавучего якоря, содержащего складной каркас из ребер 6 жесткости плавучего якоря и оболочку 9 из гибкого материала. Складной каркас прикреплен к корпусу 11 судна при помощи буксирной тяги 2 и соединен с буем 12. Концы ребер 6 жесткости плавучего якоря при помощи строп 5 соединены с центральной управляющей тягой 7 плавучего якоря, другой конец тяги 7 соединен посредством муфты 8 с управляющими тросами 1, прикрепленными к корпусу 11 судна в кормовой оконечности. Буксирная тяга 2 соединена со скобой 4 поддержки буксирной тяги 2, оснащенной роликом 10, установленным в направляющей дуге 3, прикрепленной к корпусу 11 судна в кормовой оконечности.
Система предотвращения брочинга работает следующим образом. При эксплуатации судна в условиях незначительного волнения и при движении на встречном волнении плавучий якорь вынимается из воды с тем, чтобы не создавать дополнительного сопротивления воды движению судна.
При движении судна в условиях попутного волнения, когда может возникнуть опасность брочинга, плавучий якорь, содержащий складной каркас из ребер 6 жесткости плавучего якоря и оболочку 9 из гибкого материала спускается на воду и удерживается на заданном расстоянии от поверхности воды при помощи буя 12. При этом буксирная тяга 2, посредством которой усилия от плавучего якоря передаются на корпус 11 судна, соединена со скобой 4 поддержки буксирной тяги 2, оснащенной роликом 10, установленным в направляющей дуге 3. Такая конструкция позволяет избежать попадания буксирной тяги 2 в зону работы гребного винта. При этом перемещение ролика 10 в направляющей дуге 3 позволяет буксирной тяге 2 беспрепятственно поворачиваться относительно корпуса 11 судна.
Для исследования возникновения явления брочинга следует рассмотреть особенности реального ветрового волнения. Согласно (Шулейкин В.В. Физика моря. М.: Наука, 1968. - 1080 с.) профиль ветровых волн отклоняется от трохоидального, при этом вершины волн становятся более заостренными, а подошвы -пологими. Общие уравнения семейства кривых, к которым принадлежат профили ветровых волн, записываются в виде:

где θ - фазовый угол, рад;
а, b - полуоси некоторого эллипса, м;
R - радиус круга качения, м.
Радиус круга качения определяется выражением:

где λ - длина волны, м.
Параметры эллипса определяются из условий:


где h - высота волны, м;
 - радиус производящей окружности, м;
- радиус производящей окружности, м;
 - осредненное на протяжении длины волны значение скорости дрейфового течения, м/с;
- осредненное на протяжении длины волны значение скорости дрейфового течения, м/с;
υ=ω⋅r0 - скорость движения частиц по окружности, м/с;
ω - круговая частота волны, рад/с.
Проведенные исследования (Шулейкин В.В. Физика моря. - М.: Наука, 1968. - 1080 с.) показали, что траектория движения частиц в волне является достаточно сложной и содержит петли. Здесь на круговращательное движение частиц в соответствии с элементарной теорией трохоидальных волн, накладывается поступательное движение, объясняемое эффектом Стокса («волновое» течение), а также дрейф от действия ветра. При этом обе составляющие поступательного движения не являются постоянными, а непрерывно изменяются по длине волны.
Согласно (Шулейкин В.В. Физика моря. - М.: Наука, 1968. - 1080 с.) мгновенное значение горизонтальной скорости частицы в волне ux можно определить из выражения

Видно, что горизонтальная составляющая скорости движения частиц в волне изменяется по ее длине.
Результаты расчета с использованием формул (1) - (5) представлены на фиг. 1 - фиг. 3. Расчет выполнялся для волны длиной λ=30 м и высотой h=3 м при осредненном на протяжении длины волны значении скорости дрейфового течения 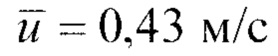 .
.
Влияние изменения скорости обтекания корпуса на динамику судна на попутном волнении рассмотрим на примере МТЯ типа «Тунцелов-1» проекта 1331, имеющего длину между перпендикулярами 30 м и наибольшее водоизмещение 367 т. Пусть судно двигалось со скоростью 6 м/с, находясь на заднем склоне волны в районе ее подошвы, где скорость частиц жидкости близка к нулю (фиг. 2). В этом случае согласно фиг. 4 буксировочное сопротивление судна составляет порядка 58 кН. После попадания на вершину волны скорость судна относительно водной среды уменьшится вследствие того, что частицы жидкости имеют скорость около 2,5 м/с (фиг. 2), направленную по ходу движения судна. В таких условиях буксировочное сопротивление судна уменьшится более чем в 6 раз и составит около 9 кН (фиг. 4), из-за этого скорость судна начнет возрастать.
Резкое снижение буксировочного сопротивления судна приведет и к тому, что гребной винт судна станет гидродинамически легким, поэтому число оборотов двигателя начнет расти. Как следствие из всего описанного, режим движения судна в таких условиях будет неустановившимся.
После того, как судно окажется на переднем склоне волны, а его носовая оконечность будет приближаться к ее подошве, нос судна окажется в зоне, где частицы жидкости движутся с малой скоростью в направлении движения судна или даже в обратном направлении, при этом корма судна будет находиться в условиях попутного потока со значительной скоростью. В результате этого носовая оконечность начнет затормаживаться вследствие резкого роста сил сопротивления на ней, т.к. согласно фиг. 2 скорость частиц жидкости в районе подошвы волны может быть направлена противоположно направлению движения судна.
В таких условиях режим движения судна является неустановившимся. Поэтому силы сопротивления и дрейфа, а также момент, действующий на корпус судна, зависят не только от величины параметров, определяющих состояние движения в каждое мгновение, но и от характера всего процесса, предшествующего данному состоянию (Небеснов В.И. Динамика двигателя в системе корпус судна - винты - двигатели. - Л.: Судпромгиз, 1961. - 374 с.) Характер процесса при таких движениях судна исключительно сложный. Криволинейность траектории центра тяжести судна, рыскание, а также изменение условий взаимодействия движителей, рулей и корпуса судна обуславливают изменение во времени углов атаки в различных точках диаметральной плоскости и местных скоростей натекания потока воды. В связи с этим судно может быть развернуто лагом к волне и опрокинуто.
В случае реализации предлагаемой системы предотвращения брочинга, если судно начинает разворачиваться лагом к первоначальному курсу, то натяжение одного из управляющих тросов 1 ослабевает, а другого - увеличивается (если корма смещается влево, то натягивается левый управляющий трос 1, если вправо - правый управляющий трос 1. За счет натяжения управляющего троса 1, соединенного посредством муфты 8 крепления управляющих тросов с центральной управляющей тягой 7 плавучего якоря, происходит ее перемещение в направлении корпуса судна 11. При этом центральная управляющая тяга 7 плавучего якоря воздействует на стропы 5, которые поворачивают ребра жесткости 6 плавучего якоря, образующие складной каркас, и раскрывают оболочку 9 из гибкого материала. После раскрытия оболочки 9 из гибкою материала на плавучем якоре возникает гидродинамическая сила, передаваемая посредством буксирной тяги 2 на корпус 11 судна в кормовой оконечности.
В результате этого, на кормовую оконечность корпуса 11 судна действует сила, направленная противоположно первоначальному курсу судна. Эта сила обеспечивает устойчивость судна на курсе и исключает возможность резкого разворота судна лагом к волне и его опрокидывание. Судно с традиционной конструкцией в условиях попутного волнения не обладает достаточной устойчивостью и вследствие случайных возмущений нередко разворачивается перпендикулярно первоначальному направлению движения и переворачивается.
Под действием силы, действующей на кормовую оконечность корпуса 11 судна, судно начинает разворот в обратном направлении в горизонтальной плоскости и возвращается на первоначальный курс. При этом натяжение управляющего троса 1 ослабевает, длины управляющих тросов 1 с левого и правого борта выравниваются 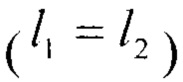 и центральная управляющая тяга 7 плавучего якоря перемещается в направлении от корпуса 11 судна. Это сопровождается уменьшением натяжения строп 5, поворотом ребер 6 жесткости плавучего якоря в первоначальное положение и закрытием оболочки 9 из гибкого материала, что, в свою очередь, ведет к резкому уменьшению гидродинамической силы, действующей на плавучий якорь, в результате чего он не оказывает существенного влияния на буксировочное сопротивление судна.
и центральная управляющая тяга 7 плавучего якоря перемещается в направлении от корпуса 11 судна. Это сопровождается уменьшением натяжения строп 5, поворотом ребер 6 жесткости плавучего якоря в первоначальное положение и закрытием оболочки 9 из гибкого материала, что, в свою очередь, ведет к резкому уменьшению гидродинамической силы, действующей на плавучий якорь, в результате чего он не оказывает существенного влияния на буксировочное сопротивление судна.
Следует отметить, что экстремальная ситуация, связанная с возникновением брочинга, может развиваться стремительно в условиях значительной неопределенности. В таких условиях человек практически не способен принимать правильные решения по управлению судном, а своими действиями может лишь усугубить ситуацию. В частности, рулевой, видя поворот судна в сторону (например, вправо) и не зная, что обтекание корпуса судна идет со стороны кормы, стремится вернуть судно на прежний курс, поворачивая перо руля влево, что еще быстрее разворачивает судно лагом к волне и создает предпосылки переворота судна под действием опрокидывающего момента, образующегося за счет разницы гидродинамических давлений на борта. Поэтому использование в такой ситуации конструкции ближайшего аналога, а также других известных конструкций плавучих якорей, управление работой которых осуществляется силами экипажа, не позволит обеспечить безопасность судна.
Таким образом, предлагаемая конструкция повышает курсовую устойчивость судна на попутном волнении, предотвращает разворот судна лагом к волне, что позволяет избежать опрокидывания судна, и, следовательно, повысить безопасность мореплавания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ БРОЧИНГА | 2016 |
|
RU2620849C1 |
| НОСОВАЯ ОКОНЕЧНОСТЬ КОРПУСА СУДНА | 2021 |
|
RU2761360C1 |
| КРЫЛЬЕВАЯ СИСТЕМА СУДНА | 2019 |
|
RU2748811C2 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| Способ транспортировки крупного айсберга | 2020 |
|
RU2743239C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ | 1991 |
|
RU2009961C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ НОСОВОЙ ОКОНЕЧНОСТИ КОРПУСА СУДНА | 2021 |
|
RU2765518C1 |
| КОРПУС СУДНА | 2019 |
|
RU2743677C2 |
| КОРПУС СУДНА | 2018 |
|
RU2685369C1 |
| КОРПУС СУДНА | 2017 |
|
RU2667025C1 |
Изобретение относится к области судостроения и может быть использовано при постройке и модернизации судов. Система предотвращения брочинга включает в себя плавучий якорь, который содержит оболочку из гибкого материала, связанную со складным каркасом, прикрепленным к буксирной тяге и бую, а также механизм складывания/раскладывания каркаса и оболочки. Механизм складывания/раскладывания каркаса и оболочки оснащен управляющими тросами, закрепленными на корме судна по обе стороны от буксирной тяги и посредством муфты связанными с центральной управляющей тягой якоря, которая при помощи строп связана с ребрами жесткости складного каркаса. Достигается повышение безопасности мореплавания. 7 ил.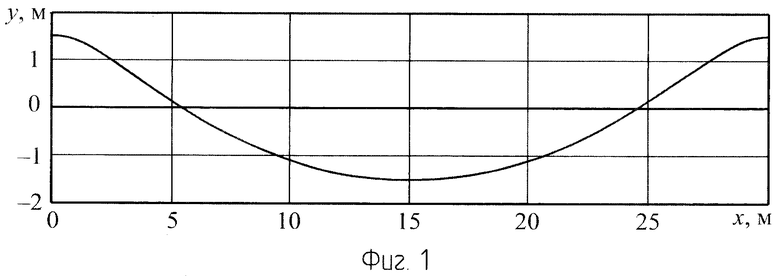
Система предотвращения брочинга, включающая плавучий якорь, содержащий оболочку из гибкого материала, связанную со складным каркасом, прикрепленным к буксирной тяге и бую, механизм складывания/раскладывания каркаса и оболочки, отличающаяся тем, что механизм складывания/раскладывания каркаса и оболочки оснащен управляющими тросами, закрепленными на корме судна по обе стороны от буксирной тяги и посредством муфты связанными с центральной управляющей тягой якоря, которая при помощи строп связана с ребрами жесткости складного каркаса.
| SU 1358295 A1, 27.10.2004 | |||
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ БРОЧИНГА | 2016 |
|
RU2620849C1 |
| ОТРЕЗНОЕ УСТРОЙСТВО, СПОСОБ РЕЗКИ И ПРИМЕНЕНИЕ УСТРОЙСТВА ДЛЯ РЕЗКИ ЛИНИИ, ПРОХОДЯЩЕЙ ОТ ПЛАВУЧЕГО СРЕДСТВА | 2010 |
|
RU2518930C2 |
| GB 191507793 A, 16.12.1915. | |||

