Перекрестная ссылка на родственную заявку
[0001] Эта заявка испрашивает приоритет предварительной патентной заявки США № 62,653,067, поданной 5 апреля 2018 года, полное содержание которой включено в данный документ по ссылке.
Уровень техники
[0002] Настоящее изобретение относится к автоматическому испытательному устройству и компонентам, связанным с испытательным оборудованием и имитационной камерой для спутниковой бортовой двигательной установки (OBP).
[0003] Обычно, OBP-системы испытываются в наземном испытательном оборудовании, чтобы определять параметры рабочих характеристик перед доставкой потребителям для встраивания в спутник. Это испытание создает выходные результаты данных испытания, чтобы подтверждать рабочие характеристики OBP-системы и, в целом, является трудоемким и отнимающим много времени процессом.
Сущность изобретения
[0004] Изобретение обеспечивает интерфейсный узел для соединения бортовой двигательной установки с испытательным оборудованием. Интерфейсный узел включает в себя опорный элемент, выполненный с возможностью присоединения к манипуляторной системе, и монтажный элемент, выполненный с возможностью присоединения к бортовой двигательной установке. Множество каналов протягивается между и соединяет монтажный элемент с опорным элементом.
[0005] Изобретение обеспечивает, в другом аспекте, испытательную систему для испытания бортовой двигательной установки. Испытательная система включает в себя резервуар, вакуумный насос в функциональном сообщении с резервуаром и множество датчиков, расположенных в резервуаре. Испытательная система дополнительно включает в себя манипуляторную систему, участок которой является автоматически подвижным по направлению к и от резервуара. Испытательная система дополнительно включает в себя интерфейсный узел, имеющий опорный элемент, выполненный с возможностью присоединения к манипуляторной системе, и монтажный элемент, выполненный с возможностью присоединения к бортовой двигательной установке. Множество каналов протягивается между и соединяет монтажный элемент с опорным элементом.
[0006] Изобретение обеспечивает, в еще одном аспекте, способ испытания бортовой двигательной установки в испытательном оборудовании. Способ включает в себя присоединение бортовой двигательной установки к интерфейсному узлу и присоединение интерфейсного узла к манипуляторной системе. Способ также включает в себя перемещение, посредством манипуляторной системы, интерфейсного узла по направлению к камере испытательного оборудования, так что по меньшей мере участок интерфейсного узла находится в камере. Способ дополнительно включает в себя присоединение интерфейсного узла к испытательному оборудованию, так что интерфейсный узел выполнен с возможностью принимать текучую среду от испытательного оборудования. Способ дополнительно включает в себя отсоединение манипуляторной системы от интерфейсного узла, работу бортовой двигательной установки и измерение и запись выходной тяги бортовой двигательной установки.
[0007] Другие аспекты изобретения станут понятны посредством рассмотрения подробного описания и сопровождающих чертежей.
Краткое описание чертежей
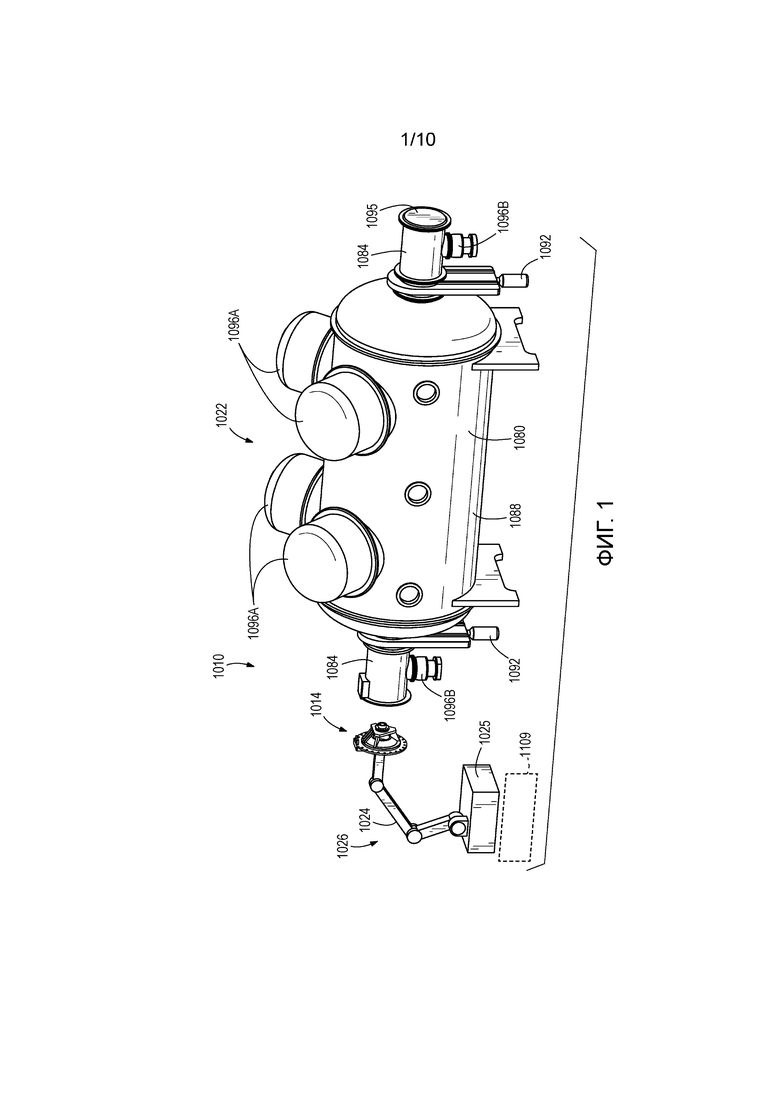
[0008] Фиг. 1 - это вид в перспективе испытательного оборудования, включающего в себя испытательный узел в соответствии с изобретением, иллюстрирующий интерфейсный узел испытательного узла в первой, расцепленной позиции.
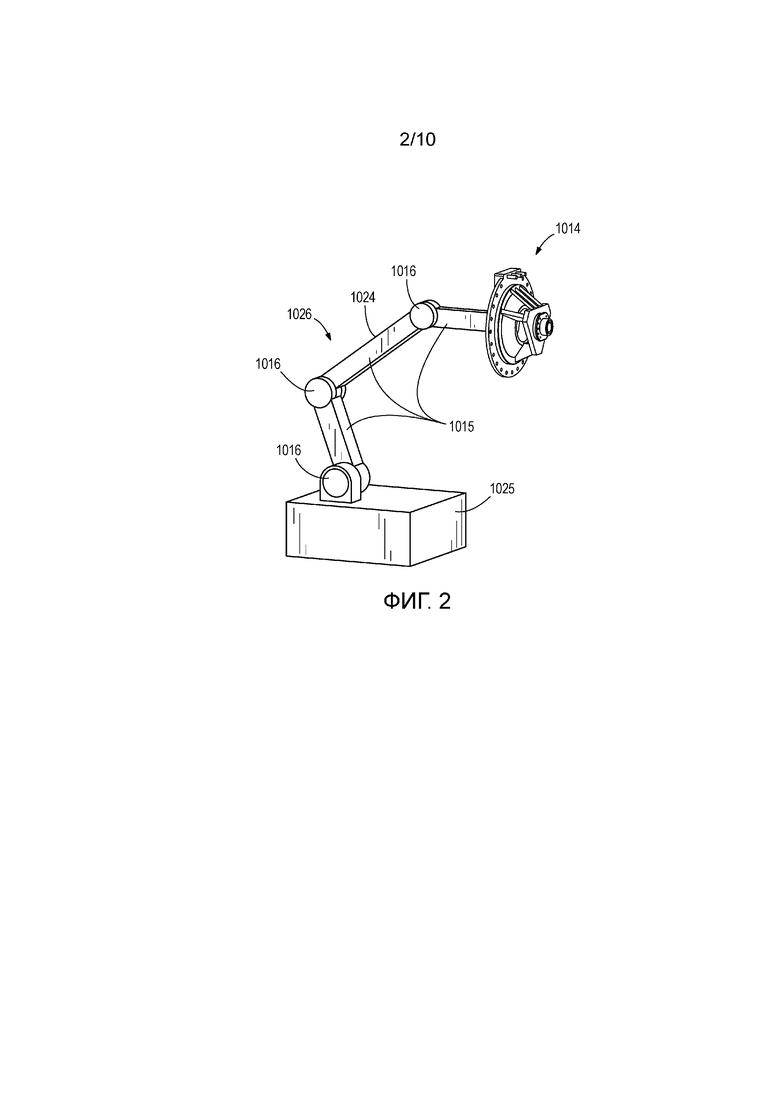
[0009] Фиг. 2 - это вид в перспективе испытательного узла на фиг. 1, иллюстрирующий интерфейсный узел в манипуляторной системе.
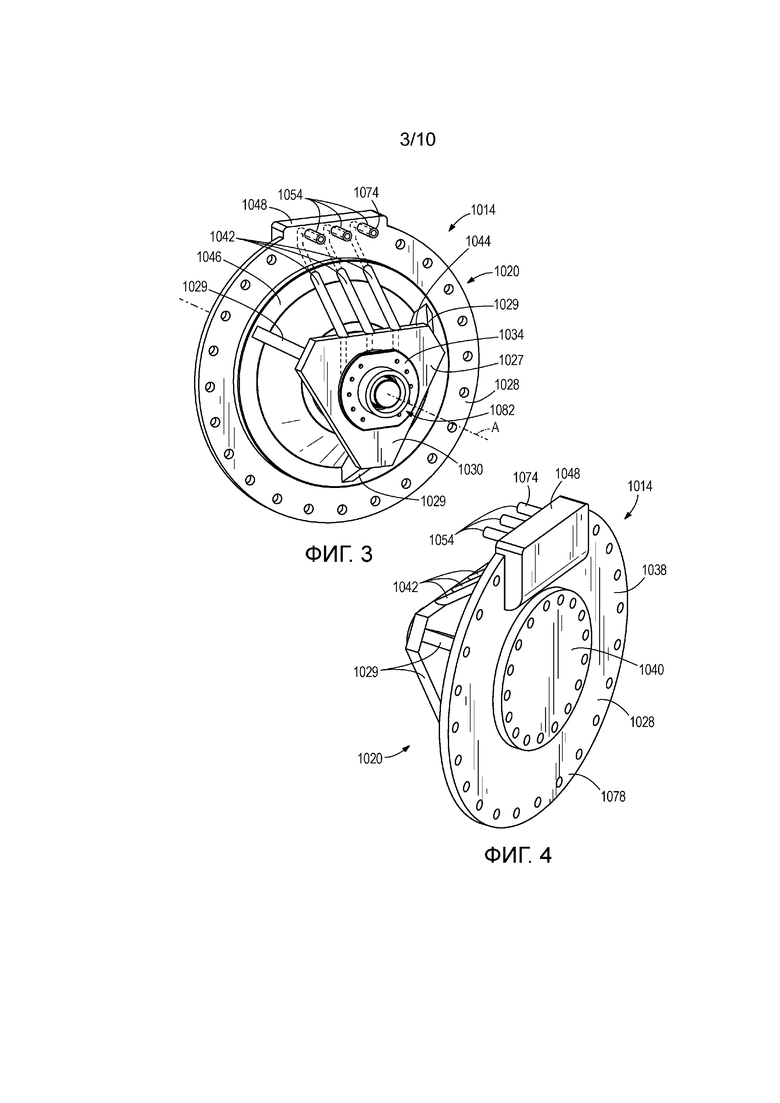
[0010] Фиг. 3 - это вид в перспективе спереди интерфейсного узла на фиг. 2, включающего в себя интерфейсный элемент и OBP-систему.
[0011] Фиг. 4 - это вид в перспективе сзади интерфейсного узла на фиг. 3.
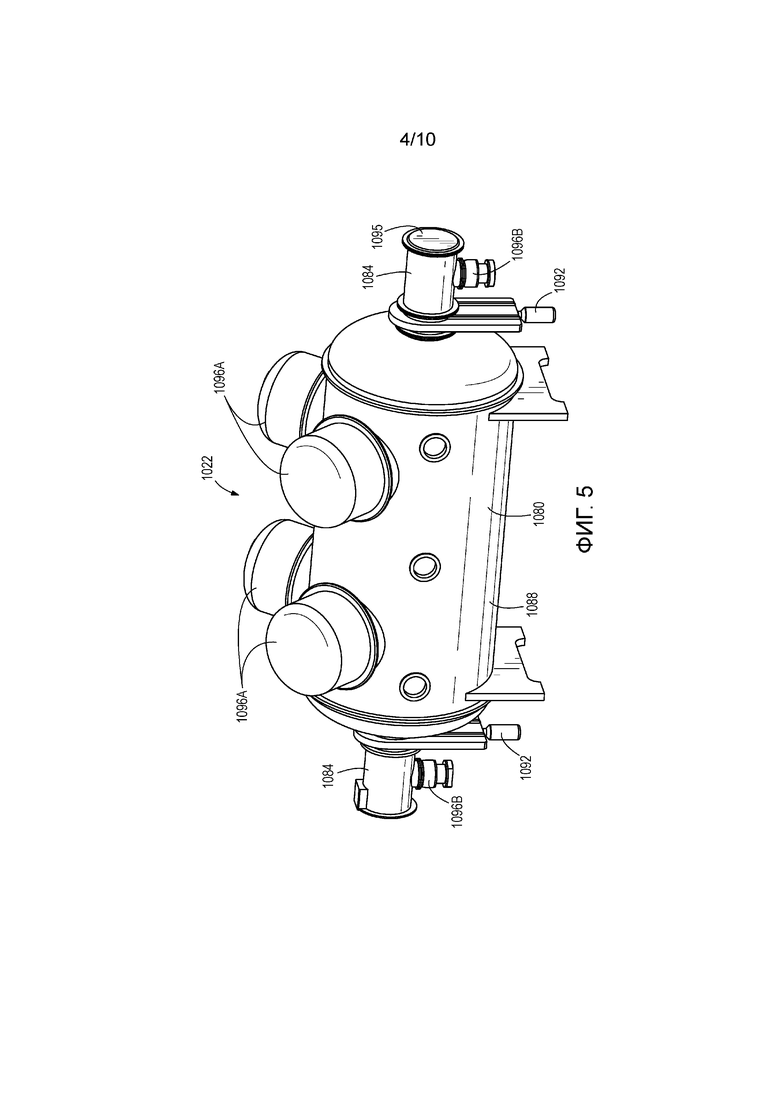
[0012] Фиг. 5 - это вид в перспективе испытательного оборудования на фиг. 1.
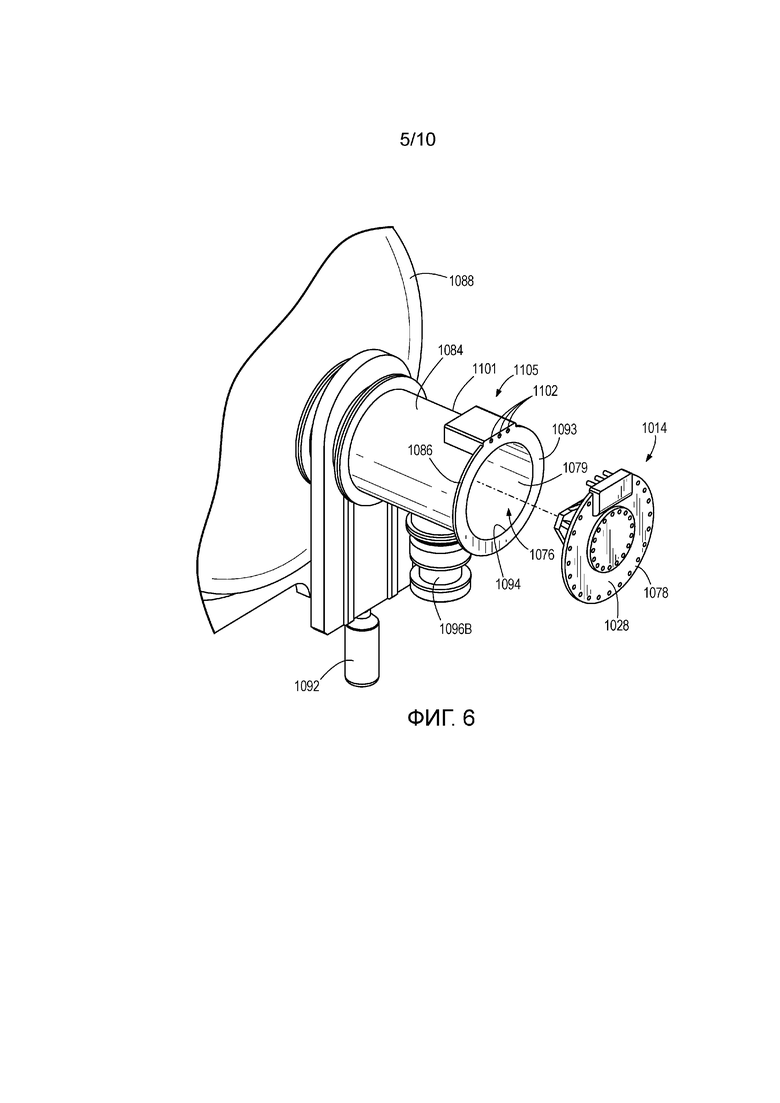
[0013] Фиг. 6 - это укрупненный, частично покомпонентный вид торцевого участка испытательного оборудования на фиг. 5, включающего в себя интерфейсный узел на фиг. 3.
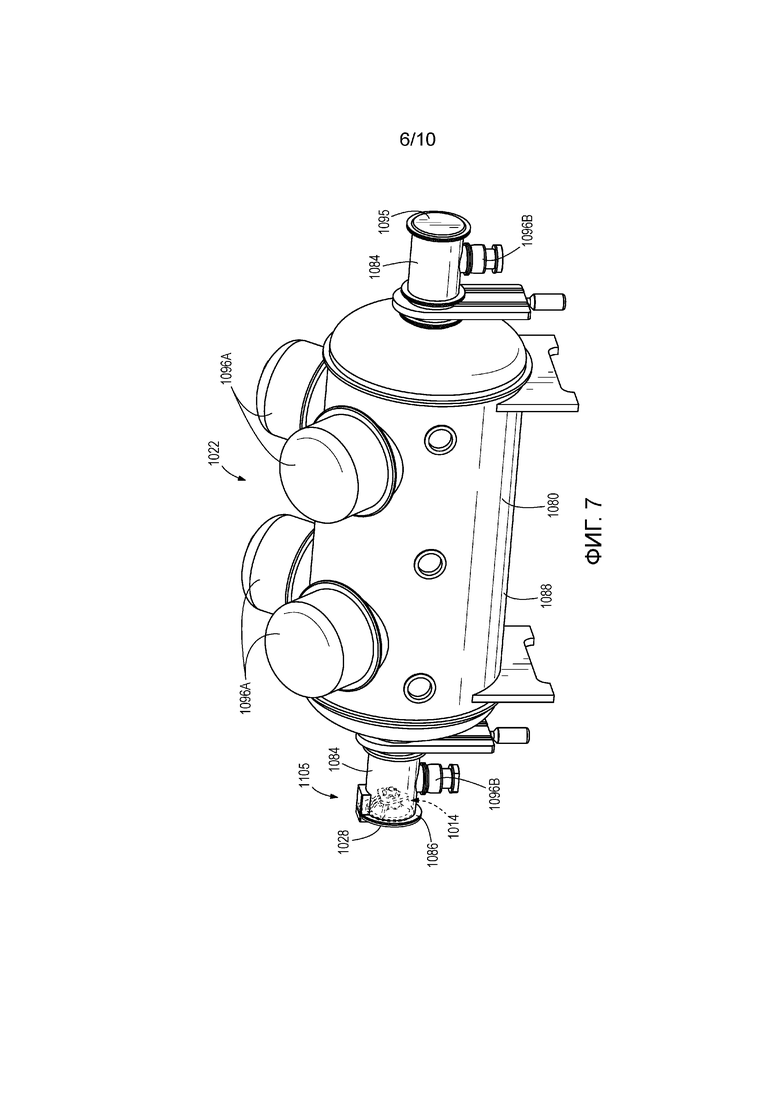
[0014] Фиг. 7 - это вид в перспективе испытательного оборудования на фиг. 5 и интерфейсного узла, иллюстрирующий интерфейсный узел во второй, сцепленной позиции.
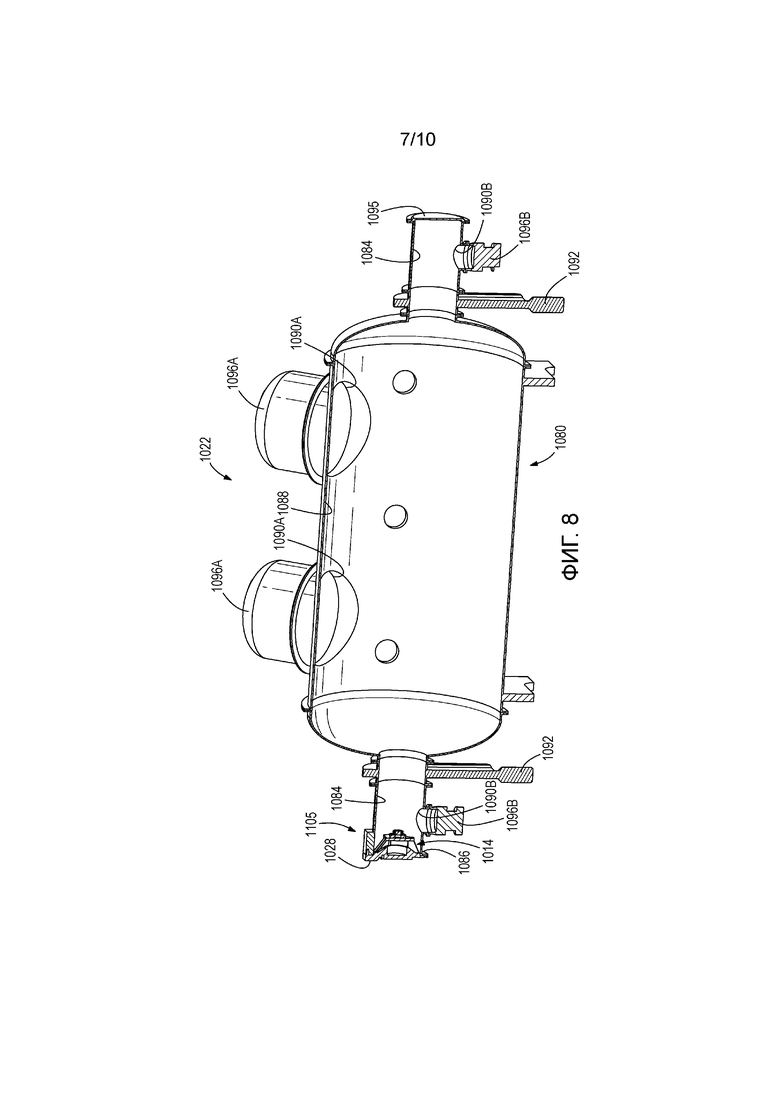
[0015] Фиг. 8 - это вид в поперечном сечении испытательного оборудования на фиг. 7.
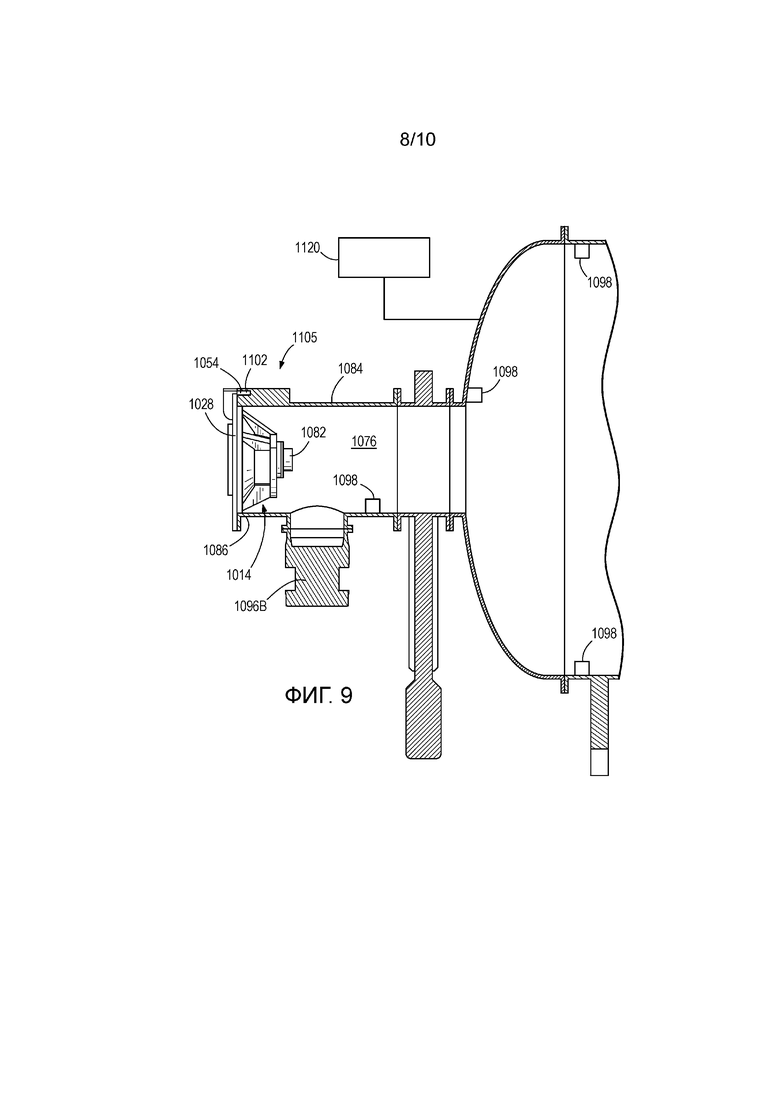
[0016] Фиг. 9 - это укрупненный вид сбоку торцевого участка испытательного оборудования на фиг. 7 с участками, удаленными для ясности.
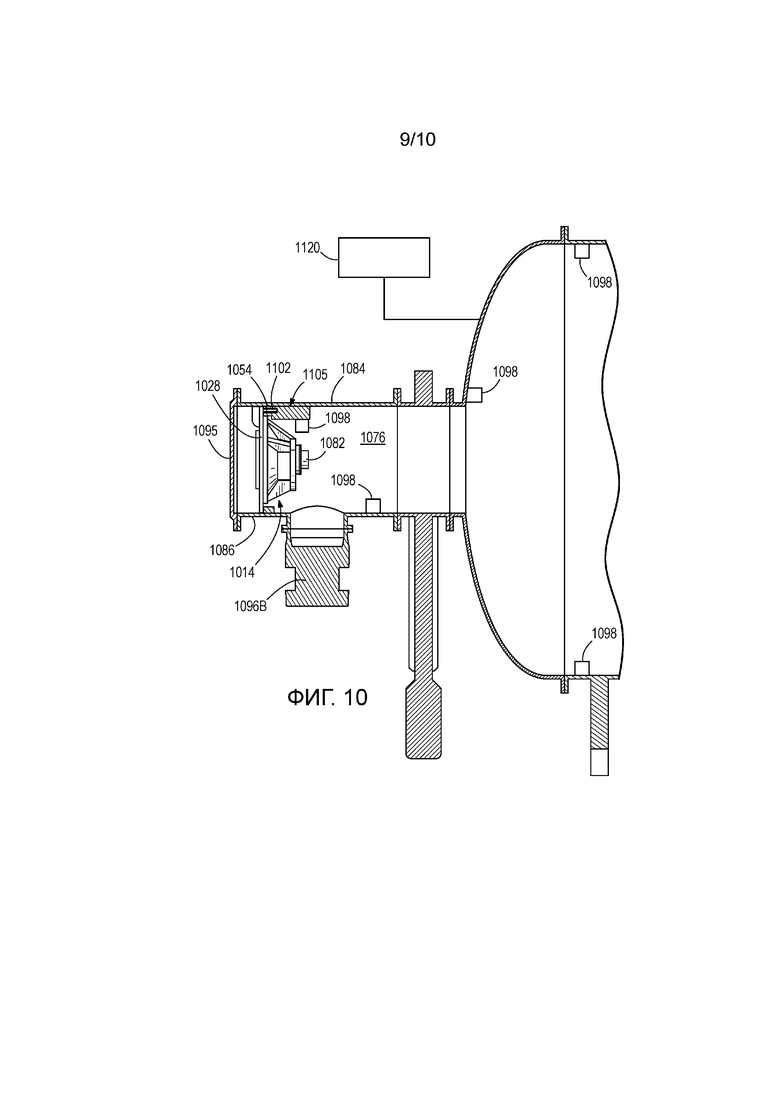
[0017] Фиг. 10 - это другой укрупненный вид сбоку крайнего участка испытательного оборудования, иллюстрирующий другой вариант осуществления интерфейсного узла в сцепленной позиции в соответствии с изобретением.
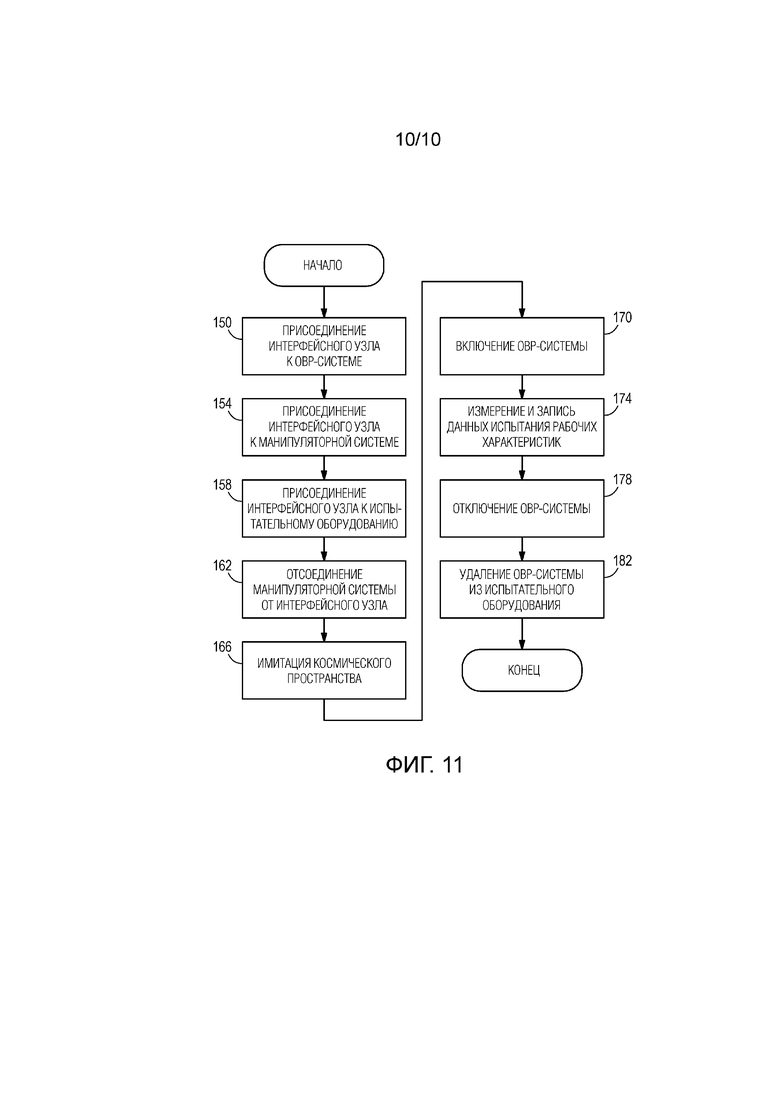
[0018] Фиг. 11 - это блок-схема последовательности операций испытательного процесса, связанного с испытательными OBP-системами.
[0019] Прежде чем какие-либо варианты осуществления изобретения объясняются в деталях, должно быть понятно, что изобретение не ограничивается в своем применении деталями конструкции и размещением компонентов, изложенными в последующем описании или иллюстрированными на сопровождающих чертежах. Изобретение является приспособленным для поддержания других вариантов осуществления и применения на практике или выполнения другими способами. Также, должно быть понятно, что фразеология и терминология, применяемая здесь, используются с целью описания и не должна быть расценена как ограничение.
Подробное описание изобретения
[0020] Фиг. 1 иллюстрирует испытательный узел 1010 для испытания спутниковой OBP-системы. Испытательный узел 1010 включает в себя интерфейсный узел 1014, выполненный с возможностью соединения с OBP-системой и для соединения с участком испытательного оборудования 1022. Испытательный узел 1010 также включает в себя манипуляторную систему 1026. Иллюстрированная манипуляторная система 1026 является роботизированной рукой 1024, поддерживаемой посредством основания 1025. Роботизированная рука 1024 выполнена с возможностью перемещения, т.е., вращения и поступательного перемещения, интерфейсного узла 1014 относительно испытательного оборудования 1022. Как показано на фиг. 2, иллюстрированная роботизированная рука 1024 включает в себя множество сегментов 1015, соединенных посредством соединений 1016 для перемещения интерфейсного узла 1014. В других вариантах осуществления манипуляторная система может вместо этого принимать другие формы, такие как форма подвижной тележки, например, на колесах или рельсах, чтобы перемещать интерфейсный узел 1014 относительно испытательного оборудования 1022.
[0021] Фиг. 3-4 иллюстрируют интерфейсный узел 1014, включающий в себя интерфейсный элемент или основную часть 1020. Основная часть 1020 включает в себя монтажный элемент 1027 (т.е., в форме пластины или фланца) и опорный элемент 1028 (т.е., в форме пластины или диска), расположенный с интервалом и соединенный ножками 1029 с монтажным элементом 1027. В иллюстрированном варианте осуществления интерфейсный узел включает в себя три распорные детали или ножки 1029, при этом каждая ножка 1029 позиционируется в и протягивается из угла монтажного элемента 1027. Монтажный элемент 1027 принимает форму, чтобы размещать ножки 1029, которых может быть больше или меньше трех по числу в некоторых вариантах осуществления. В некоторых вариантах осуществления монтажный элемент 1027 может быть рядом с опорным элементом 1028, либо упираясь, либо на минимальном расстоянии от него. Альтернативно, в других вариантах осуществления, основная часть 1020 может включать в себя только один из монтажного элемента 1027 и опорного элемента 1028. Дополнительно, в других вариантах осуществления, основная часть 1020 может быть, в целом, кубоидом по форме и соответственно представляет множество сторон или граней. Кроме того, в других вариантах осуществления основная часть 1020 может быть одной из множества форм, которые представляют множество поверхностей, как будет дополнительно объяснено ниже.
[0022] Поверхность монтажного элемента 1027, обращенная от опорного элемента 1028, является первой поверхностью или стороной 1030 интерфейсного узла 1014. Кронштейн 1034 прикрепляется (крепежами) к первой стороне 1030 (т.е., монтажному элементу 1027). Кронштейн 1034 выполнен с возможностью соединения с OBP-системой 1082, так что OBP-система 1082 протягивается от и поддерживается посредством монтажного элемента 1027. Альтернативно, монтажный элемент 1027 может служить в качестве вышеупомянутого кронштейна или в ином случае быть в форме кронштейна, скобы, рычага, шпренгельной фермой и т.д. и может тесно соединять OBP-систему 1082 с основной частью 1020 или соединять OBP-систему 1082 на расстоянии с интервалом от основной части 1020, как альтернативно описывается в данном документе. В других вариантах осуществления сам монтажный элемент 1027 может формировать любую одну из сторон основной части 1020, и/или кронштейн 1034 может быть расположен на любой одной из сторон основной части 1020.
[0023] Опорный элемент 1028, в целом, является плоским и имеет, в целом, круглую форму. Более конкретно, опорный элемент 1028 имеет цилиндрическую форму и определяет продольную ось A сквозь него. Монтажный элемент 1027 располагается с интервалом от опорного элемента 1028 по продольной оси A. Кроме того, опорный элемент 1028 имеет размер, относительно больший по сравнению с монтажным элементом 1027, как будет дополнительно объяснено. Поверхность опорного элемента 1028, обращенная от монтажного элемента 1027, является второй стороной 1038 (фиг. 4) интерфейсного узла 1014. Монтажная опора 1040 прикрепляется ко второй стороне 1038 (например, крепежами). Иллюстрированная монтажная опора 1040 сама является пластиной, имеющей, в целом, круглую форму и размер, относительно меньший по сравнению с опорным элементом 1028. В некоторых вариантах осуществления монтажная опора 1040 целиком формируется как одна часть с опорным элементом 1028. Интерфейсный узел 1014 является съемным образом присоединяемым к концу роботизированной руки 1024 (фиг. 5) через монтажную опору 1040.
[0024] Иллюстрированные первая сторона 1030 и вторая сторона 1038 являются, в целом, плоскими и предоставляют поверхности присоединения для присоединения каждого из OBP-системы 1082 и конца роботизированной руки 1024 к интерфейсному узлу 1014. Вторая сторона 1038 предпочтительно находится напротив первой стороны 1030, так что монтажная опора 1040 находится на другой стороне основной части 1020 от кронштейна 1034, но это не обязательно должно быть во всех вариантах осуществления.
[0025] Обращаясь опять к фиг. 3, интерфейсный узел 1014 включает в себя множество каналов 1042. Каналы 1042 поддерживаются основной частью 1020. Иллюстрированные каналы протягиваются между монтажным элементом 1027 и опорным элементом 1028. Кроме того, в иллюстрированном варианте осуществления, интерфейсный узел 1014 включает в себя три канала 1042. В других вариантах осуществления интерфейсный узел 1014 может включать в себя два или меньше или четыре или больше каналов 1042.
[0026] Участок каждого из каналов 1042 позиционируется по меньшей мере частично внутри в монтажном элементе 1027 и частично внутри в опорном элементе 1028. Каналы 1042 прокладываются, чтобы передавать электрические сигналы, жидкости, газы или другие вещества от точки входа в поверхности основной части до точки выхода. Каналы 42 могут, следовательно, быть облицованными или необлицованными, и могут сами содержать провод, шланг, трубу или другие формы трубопровода, чтобы содействовать прохождению сигналов или веществ. Например, первый и второй каналы 1042 могут быть проложены, чтобы передавать электрический сигнал, а третий канал 1042 может быть проложен, чтобы передавать текучую среду, такую как ракетное топливо.
[0027] В частности, в одном варианте осуществления, каналы 1042 формируются посредством трубопровода (например, трубы), протягивающегося между соединителями или отверстиями, расположенными на первой стороне 1030 (не показано; в осевом направлении за кронштейном 1034 из системы отсчета на фиг. 3) монтажного элемента 1027, и соединителями или отверстиями 1054 опорного элемента 1028. Иллюстрированные каналы 1042 протягиваются от отверстий на первой стороне 1030 в качестве соединительных туннелей сквозь кромку 1044 монтажного элемента 1027 к промежуточной стороне 1046 интерфейсного узла 1014. Каналы 1042 затем протягиваются как соединительные туннели сквозь опорный элемент 1028 от промежуточной стороны 1046 до или почти до верхней кромки 1048 опорного элемента 1028. В частности, каналы 1042 входят и выходят из опорного элемента 1028 на промежуточной стороне 1046. Более конкретно, монтажный элемент 1027 и опорный элемент 1028 определяют проходы или соединительные туннели, и каналы 1042 формируются посредством участков трубопровода (например, гибкого шланга), которые протягиваются от отверстий на первой стороне 1030 через проходы монтажного элемента 1027 и проходы опорного элемента 1028 до отверстий 1054 опорного элемента 1028. Проходы могут быть сформированы во время производства монтажного элемента 1027 и опорного элемента 1028 (например, посредством литья) и/или могут быть сформированы посредством высверливания проходов в монтажном элементе 1027 и опорном элементе 1028 после производства.
[0028] В других вариантах осуществления "каналы" вместо этого являются проводом, шлангом, трубой или другим трубопроводом, прокладываемым целиком или частично вдоль внешней поверхности основной части 1020 и/или внешних поверхностей опорного элемента 1028 и монтажного элемента 1027. В некоторых вариантах осуществления основная часть 1020 является одной деталью, и каналы альтернативно формируются посредством проходов, так что каналы являются полностью внедренными в основную часть 1020. В еще одних вариантах осуществления каналы являются смесью внутренних, частично встроенных или внешних проводов, шлангов, труб или других трубопроводов, протягивающихся от точки входа на или в основной части 1020 до точки выхода на или в основной части 1020. В еще одних вариантах осуществления проходы облицованы подходящим материалом для формирования каналов, так что каналы формируются частично посредством проходов, и трубопровод протягивается от проходов к отверстиям. Кроме того, в некоторых вариантах осуществления, все отверстия (т.е., отверстия на первой стороне 1030 и отверстия 1054) могут быть расположены на одной и той же или различных сторонах, или в любом их сочетании, основной части 1020. В еще одних вариантах осуществления предусматривается только единственный канал, или единственный канал выполнен с возможностью содержать или разрешать прохождение множества текучих сред, или сочетания электрических сигналов, жидкостей, газов или других веществ способом, который описан в данном документе.
[0029] Соединители 1074 (фиг. 3), например, "быстрое соединение" или аналогичные соединители для присоединения предоставляют точки соединения, выполненные с возможностью разъемным образом соединять отверстия монтажного элемента 1027 и отверстия 1054 опорного элемента 1028 с внешними соединениями в форме провода, шланга, трубы и другого трубопровода, которые будут дополнительно описаны ниже. Соединители 1074 могут быть целиком сформированы с отверстиями 1054 или присоединены к отверстиям первой стороны 1030 и/или отверстиям 1054, так что соединители 1074 протягиваются от соответствующих отверстий 1054.
[0030] Отверстия монтажного элемента 1027 находятся в сообщении с OBP-системой 1082 (например, посредством аналогичных соединителей 1074, как описано выше), так что каналы 1042 соединяются между OBP-системой 1082 и отверстиями 1054. В одном варианте осуществления кронштейн 1034 включает в себя сопрягающиеся соединители, так что, когда OBP-система 1082 прикрепляется посредством кронштейна 1034 к первой стороне 1030, кронштейн 1034 также соединяет с возможностью обмена текучей средой OBP-систему 1082 с каналами 1042 интерфейсного узла 1014. Другими словами, OBP-система 1082 соединяется с возможностью обмена текучей средой с каналами 1042 через кронштейн 1034. Более конкретно, кронштейн 1034 включает в себя отверстия и каналы, протягивающиеся между ними аналогично каналам 1042 основной части 1020, которые прокладываются, чтобы передавать электрические сигналы, жидкости, газы или другие вещества. Например, кронштейн 1034 включает в себя отверстия для соединения с возможностью обмена текучей средой между отверстиями на первой стороне 1030 основной части 1020 и точками соединения OBP-системы 1082. Провод, шланг, труба или другой трубопровод протягивается между отверстиями, и/или сам кронштейн 1034 может определять проходы, протягивающиеся между отверстиями для формирования каналов кронштейна 1034.
[0031] На другой, второй стороне 1038 интерфейсного узла 1014 отверстия 1054 опорного элемента 1028 соединяются с возможностью обмена текучей средой с испытательным оборудованием 1022, как дополнительно обсуждается ниже. Следовательно, OBP-система 1082 может быть соединена с возможностью обмена текучей средой с испытательным оборудованием 1022 через каналы 1042.
[0032] Фиг. 5 иллюстрирует один вариант осуществления испытательного оборудования 1022, включающего в себя резервуар или камеру 1080. Камера 1080 включает в себя множество боковых камер 1084 и одну главную испытательную камеру 1088. В иллюстрированном варианте осуществления камера 1080 включает в себя две боковые камеры 1084. В других вариантах осуществления камера 1080 может включать в себя одну или три или более камер 1080 или подкамер (т.е., испытательную камеру 1088, боковые камеры 1084). Две иллюстрированные боковые камеры 1084 располагаются на противоположных концах испытательной камеры 1088. Кроме того, две боковые камеры 1084 могут именоваться как камеры зацепления OBP-системы.
[0033] Со ссылкой на фиг. 8, испытательное оборудование 1022 дополнительно включает в себя множество точек 1090 соединения для соединения с вакуумными насосами 1096. По существу, вакуумный насос 1096 может быть в функциональном сообщении с камерой 1080. В иллюстративном варианте осуществления испытательная камера 1088 включает в себя четыре отверстия 1090, и каждая боковая камера 1084 включает в себя одно отверстие 1090. В других вариантах осуществления испытательное оборудование 1022 может включать в себя одно или более отверстий 1090 для соединения с вакуумным насосом 1096. Иллюстрированные отверстия 1090A испытательной камеры 1088 выполнены с возможностью соединения с крионасосом или криогенным насосом 1096A. Каждое отверстие 1090B боковой камеры 1084 выполнено с возможностью соединения с турбомолекулярным насосом 1096B, примером которого является дублирующий вакуумный турбонасос Пфейфера, продаваемый компанией Pfeiffer Vacuum. Другие насосы, подходящие вместе с этим, включают в себя ионные насосы, крионасосы или диффузионные насосы. В других вариантах осуществления камера 1080 может содержать один или три или более вакуумных насосов 1096 для каждой камеры 1080 или подкамеры 1084, 1088, или только с одним вакуумным насосом 1096, обслуживающим все камеры 1080 или подкамеры 1084, 1088.
[0034] С продолжающейся ссылкой на фиг. 8, каждая из боковых камер 1084 отделяется от испытательной камеры 1088 перегородкой или разделителем 1092. В иллюстрированном варианте осуществления разделитель является клапаном 1092. Клапан 1092 является подвижным из первой открытой позиции, в которой связанная боковая камера 1084 и испытательная камера 1088 находятся в сообщении с возможностью обмена текучей средой, во вторую закрытую позицию, в которой связанная боковая камера 1084 и испытательная камера 1088 не находятся в сообщении с возможностью обмена текучей средой. В альтернативных вариантах осуществления клапан или другая перегородка не существует между боковой камерой(ами) 1084 и испытательной камерой 1088.
[0035] Со ссылкой на фиг. 5 и 6, торец 1086 каждой боковой камеры 1084 включает в себя обод 1093, формирующий отверстие 1094, соединяющее с возможностью обмена текучей средой внутренний объем 1076 боковой камеры с внешней средой (т.е., лабораторией или испытательной комнатой). Как показано на фиг. 5, одна из боковых камер 1084 (т.е., камера справа от системы отсчета на фиг. 5) включает в себя крышку 1095, прикрепленную к ободу 1093 для загораживания отверстия 1094, а другая из боковых камер 1084 (т.е., камера слева от системы отсчета на фиг. 5) является открытой во внешнюю среду. Внешний круговой участок 1078 (фиг. 6) опорного элемента 1028 интерфейсного узла 1014 взаимодействует с ободом 1093. Другими словами, опорный элемент 1028 имеет размер, соответствующий окружности обода 1093, так что опорный элемент 1028 является зацепляемым со всей окружностью обода 1093. Кроме того, внутренняя поверхность 1079 (например, "стенка камеры") боковой камеры 1084 является, в целом цилиндрическим с учетом условий во время испытания, как будет дополнительно объяснено. Обод 1093 может также формировать участок и именоваться стенкой камеры.
[0036] Со ссылкой на фиг. 6 и 8, боковая камера 1084 включает в себя узел 1105 подачи. Иллюстрированный узел 1105 подачи позиционируется в верхней части 1101 монтажной камеры 1084 рядом с ободом 1093, как иллюстрировано, но в других вариантах осуществления может быть расположен около соответствующей боковой камеры 1084 в других местоположениях. Узел 1105 подачи соединяется (посредством непоказанных соединителей) с внешними источниками подачи (например, источником подачи ракетного топлива, источником электропитания, водой и т.д.) для подачи соответствующего вещества через отверстия 1102 в отверстия 1054 интерфейсного узла 1014. В иллюстрированном варианте осуществления отверстия 1054 формируют штекерное соединение, а отверстия 1102 формируют гнездовое соединение. Однако, в других вариантах осуществления, отверстия 1102 могут включать в себя соединители 1074, протягивающиеся от отверстий 1102 для соединения с отверстиями 1054 интерфейсного узла 1014.
[0037] Интерфейсный узел 1014 и/или испытательное оборудование 1022 может дополнительно содержать диагностическое оборудование, такое как диагностические зонды, датчики, тензометрические датчики и другие испытательные компоненты 1098. Например, как показано на фиг. 9, испытательное оборудование 1022 включает в себя множество датчиков 1098, расположенных в камере 1080 (включающей в себя боковую камеру 1084). Датчики 1098 конфигурируются, чтобы измерять температуру, испускаемый выходной пучок, и другие параметры испытания и окружающей среды, которые возникают во время испытания в камере 1080. Кроме того, интерфейсный узел 1014 может включать в себя систему измерения усилия, например, динамометрический элемент тензометрического датчика (не показан), расположенный между OBP-системой 1082 и первой стороной 1030 (т.е., между кронштейном 1034 и OBP-системой 1082) или в другом подходящем местоположении. Динамометрический элемент тензометрического датчика выполнен с возможностью измерять выходную тягу, создаваемую OBP-системой 1082 во время испытания.
[0038] Испытательные компоненты 1098 (например, датчики в камере 1080, динамометрический элемент тензометрического датчика и другие) находятся в электрическом соединении с контроллером 1120. Контроллер 1120 может формировать часть системы управления испытанием и записи данных для сбора данных, указываемых посредством датчиков 1098. Контроллер 1120 может отправлять данные главному контроллеру или системе управления или может сам быть главным контроллером для управления работой испытательного оборудования 1022. В частности, контроллер 1120 функционирует, чтобы управлять и/или инициировать параметры испытания, такие как расход текучей среды, электрические сигналы и т.д. для OBP-системы 1082, и задействовать диагностическое оборудование и датчики 1098 как часть процедуры испытания. Контроллер 1120 может быть дополнительно в функциональном соединении с вакуумными насосами 1096, клапаном 1092 и манипуляторной системой 1026. В вариантах осуществления с динамометрическим элементом тензометрического датчика, расположенным локально относительно интерфейсного узла 1014, динамометрический элемент может быть электрически соединен с контроллером 1120 через каналы 1042, проложенные для передачи электрических сигналов.
[0039] Со ссылкой на фиг. 1 и 6-9, роботизированная рука 1024 манипуляторной системы 1026 выполнена с возможностью перемещать интерфейсный узел 1014 между первой, расцепленной позицией (фиг. 1 и 6) и второй, сцепленной позицией (фиг. 7). Когда интерфейсный узел 1014 находится в расцепленной позиции, интерфейсный узел 1014 не соединяется с возможностью обмена текучей средой или иным образом не соединяется с соответствующей боковой камерой 1084. В частности, манипуляторная система 1026 поддерживает интерфейсный узел 1014 в расцепленной позиции (фиг. 1). Когда интерфейсный узел 1014 находится в сцепленной позиции, интерфейсный узел 1014 (т.е., опорный элемент 1028) прикрепляется к ободу 1093, и каналы 1042 соединяются с возможностью обмена текучей средой с отверстиями 1102 узла 1100 подачи. Как показано на фиг. 1, манипуляторная система 1026 позиционируется так, что некоторая часть или она вся может быть внешней по отношению к боковой камере 84 (фиг. 1). Более конкретно, вся или участок манипуляторной системы 1026 может быть располагаемым в месте 1109 переноса или иначе выполнен с возможностью доступа к месту 1109 переноса и боковой камере 1084.
[0040] Интерфейсный узел 1014 является частично вставляемым (посредством манипуляторной системы 1026) в боковую камеру 1084 и разъемным образом соединяемым с торцом 1086 боковой камеры 1084 (т.е., камерой зацепления OBP-системы), чтобы изолировать внутренний объем 1076. В иллюстрированном варианте осуществления внешний круговой участок 1078 опорного элемента 1028 соединяется с ободом 1093, например, посредством крепежей (например, болтов), и монтажный элемент 1027 (имеющий OBP-систему 1082) протягивается от опорного элемента 1028 посредством ножек 1029 в боковой камере 1084. В частности, монтажный элемент 1027 имеет размер, меньший по сравнению с опорным элементом 1028 для вставки в боковую камеру 1084. Кроме того, опорный элемент 1028 интерфейсного узла 1014 выполнен в виде крышки для закрытия отверстия 1094. OBP-система 1082 располагается в боковой камере 1084, когда опорный элемент 1028 прикрепляется к боковой камере 1084.
[0041] Присоединение интерфейсного узла 1014 к ободу 1093 может быть автоматическим и/или выполняться вручную. Например, в иллюстрированном варианте осуществления, роботизированная рука 1024 может позиционировать опорный элемент 1028 рядом с ободом 1093, и оператор может вручную приводить в действие крепежи вокруг внешнего кругового участка 1078 опорного элемента 1028. В других вариантах осуществления процесс соединения может быть полностью автоматическим (например, другой робот, выполненный с возможностью прикрепления опорного элемента 1028 к ободу 1093, или автоматизированные замки или соединители (например, пневматические, электрические) для прикрепления опорного элемента 1028 к ободу 1093). Отверстия 1054 интерфейсного узла 1014 соединяются с возможностью обмена текучей средой с отверстиями 1102 узла 1105 подачи одновременно с или после того, как интерфейсный узел 1014 прикрепляется к ободу 1093 соответствующей боковой камеры 1084.
[0042] Как показано на фиг. 8 и 9, отверстия 1054 опорного элемента 1028 соединяются с возможностью обмена текучей средой, когда интерфейсный узел 1014 устанавливается или иначе прикрепляется к боковой камере 1084. В частности, в иллюстрированном варианте осуществления, как показано на фиг. 8, конец каждого из каналов 1042, имеющий отверстие 1054, принимается в соответствующее отверстие 1102 узла 1100 подачи, когда опорный элемент 1028 устанавливается вровень с ободом 1093. В других вариантах осуществления отверстия 1054 могут быть соединены с отверстиями 1102 узла 1105 подачи посредством зажимов, пневматических замков или других типов соединителей/крепежей, которые соединяют с возможностью обмена текучей средой отверстия 1054, 1102 вместе. Функциональное сцепление интерфейсного узла 1014 с резервуаром 1080, который должен быть дополнительно описан, может, следовательно, быть полностью автоматическим.
[0043] Фиг. 10 иллюстрирует альтернативный вариант осуществления камеры 1084 зацепления OBP-системы, в котором узел 1105 подачи находится по меньшей мере частично в камере 1084. В этом варианте осуществления внешний круговой участок 1078 опорного элемента 1028 имеет такой размер, что опорный элемент 1028 полностью вставляется в боковую камеру 1084. Отверстия 1102 узла 1105 подачи также позиционируются на участке узла 1105 подачи, который находится в боковой камере 1084, так что соединение с возможностью обмена текучей средой между интерфейсным узлом 1014 и узлом 1100 подачи находится в боковой камере 1084. Крышка 1095 прикрепляется к отверстию 1094, после того как интерфейсный узел 1014 устанавливается в боковой камере 1084 для изолирования камеры 1084. Крышка 1095 может быть устанавливаемой на петле или прикрепляемой способом, опять же разрешающим функциональное сцепление интерфейсного узла 1014 с резервуаром 1080, который должен быть дополнительно описан, которое должно быть полностью автоматическим.
[0044] Узел 1105 подачи на фиг. 10 может включать в себя стенд измерения рабочих характеристик (т.е., стенд, включающий в себя и/или электрически соединенный с испытательными компонентами 1098, такими как датчики, в камере 1080). В одном примере стенд измерения рабочих характеристик может включать в себя стенд обратного маятника, имеющий бесконтактные актуаторы, такие как электромагниты. Альтернативно динамометрическому элементу тензометрического датчика, расположенному на интерфейсном узле 1014, стенд обратного маятника определяет выходную тягу, создаваемую OBP-системой 1082 во время испытания, на основе того, насколько большое усилие электромагниты создают, чтобы поддерживать OBP-систему 1082/интерфейсный узел 1014 в вертикальном положении (относительно боковой камеры 1084). В другом варианте осуществления стенд измерения рабочих характеристик может быть торсионным маятником, который определяет выходную тягу, создаваемую OBP-системой во время испытания, на основе углового смещения торсионной пружины. По существу, испытательное оборудование 1022 может включать в себя датчики и другие измерительные компоненты, подходящие для измерения тяги двигателя, также как температуры, испускаемого выходного пучка и других параметров испытания и окружающей среды, которые возникают во время испытания в камере 1080.
[0045] Со ссылкой на фиг. 11, этапы сборки и операции испытания OBP-системы 1082 обсуждаются ниже.
[0046] На первом этапе сборки и работы OBP-система 1082 присоединяется к интерфейсному узлу 1014 через монтажный элемент 1027/кронштейн 1034, этап 150. Этот этап может быть ручным или полуавтоматическим и/или проводиться посредством дополнительного оборудования и может включать в себя соединение отверстий первой стороны 1030 с сопрягающимися отверстиями кронштейна 1034 и OBP-системы 1082 с помощью внешних соединений, таких как соединители 1074, или иным образом в форме провода, шланга, трубы или другого трубопровода, выполненного с возможностью передачи электрических сигналов, жидкостей, газов или других веществ, как необходимо для испытания. Этап 150 происходит в месте 1109 переноса, но может в некоторых случаях происходить рядом или в боковой камере 1084. В других вариантах осуществления OBP-система 1082 присоединяется к интерфейсному узлу 1014 в отдельной процедуре, и затем OBP-система 1082/интерфейсный узел 1014 позиционируется в месте 1109 переноса.
[0047] На втором этапе 154 интерфейсный узел 1014 присоединяется к манипуляторной системе 1026 через монтажную опору 1040. Манипуляторная система 1026, которая может управляться посредством контроллера 1120 или независимо управляться, и, в частности, ее роботизированная рука 1024, приводятся в близость с монтажным элементом 1040 и присоединяется к нему без ручной помощи. В некоторых вариантах осуществления интерфейсный узел 1014 может сначала быть присоединен к манипуляторной системе 1026, а после этого OBP-система 1082 присоединяется к монтажному элементу 1027/кронштейну 1034.
[0048] На третьем этапе 158 интерфейсный узел 1014 присоединяется к или сцепляется с испытательным оборудованием 1022. Относительно испытательного оборудования 1022 на фиг. 5-7, интерфейсный узел 1014 присоединяется к торцу 1086 боковой камеры 1084 и функционально соединяется с испытательным оборудованием 1022 через узел 1105 подачи. В частности, этап 158 может включать в себя перемещение интерфейсного узла 1014/OBP-системы 1082 из места 1109 переноса по направлению к боковой камере 1084. Этап 158 может дополнительно включать в себя позиционирование опорного элемента 1028 рядом с ободом 1093 боковой камеры 1084, так что монтажный элемент 1027 и OBP-система 1082 позиционируются в боковой камере 1084. Этап 158 может дополнительно включать в себя прикрепление опорного элемента 1028 интерфейсного узла 1014 к ободу 1093.
[0049] Относительно испытательного оборудования 1022 на фиг. 10 и третьего этапа 158, интерфейсный узел 1014 позиционируется в боковой камере 1084 и присоединяется к испытательному оборудованию 1022 через узел 1105 подачи в камере 1084. В частности, если установка интерфейсного узла 1014 на манипуляторную систему 1026 происходит в месте 1109 переноса, этап 158 включает в себя перемещение интерфейсного узла 1014/OBP-системы 1082 из места 1109 переноса в боковую камеру 1084. Этап 158 дополнительно включает в себя позиционирование интерфейсного узла 1014 на узле 1105 подачи. Манипуляторной системе 1026 может быть лишь необходимо позиционировать интерфейсный узел 1014 поблизости от узла 1105 подачи, с весом интерфейсного узла 1014/OBP-системы 1082, целиком или частично поддерживаемым посредством манипуляторной системы 1026.
[0050] Отверстия 1054 (или их соединители 1074) присоединяются к отверстиям 1102 узла 1105 подачи. В некоторых вариантах осуществления позиционирование интерфейсного узла 1014 рядом с узлом 1105 подачи приводит в результате к одновременному и автоматическому соединению соединителей 1074 отверстий 1054 со снабжающими отверстиями 1102 (или их соединителями). В одном примере каналы 1042 принимаются в отверстиях 1102, когда интерфейсный узел 1014 перемещается в сцепленную позицию для автоматического присоединения к узлу 1105 подачи. В других вариантах осуществления гибкие провода/шланг/трубопровод и т.д. протягиваются от снабжающих отверстий 1102 к вышеупомянутым соединителям 1074 и могут требовать ручной помощи для присоединения к ним. После присоединения тем или иным образом OBP-система 1082 находится в электрическом/газовом/жидкостном/текучем сообщении с испытательным оборудованием 1022 через интерфейсный узел 1014 (через соединители 1074 и отверстия 1102, 1054). В частности, электрические сигналы (питание и данные), жидкости, газы или другие вещества могут передаваться из испытательного оборудования 1022 в OBP-систему 1082.
[0051] На четвертом этапе 162, если интерфейсный узел 1014/OBP-система 1082 прикрепляется к ободу 1093 или в камере 1084, манипуляторная система 1026 впоследствии отсоединяется от интерфейсного узла 1014 (монтажной опоры 1040) и может дополнительно быть перемещена (на расстояние) от боковой камеры 1084.
[0052] На этапе 166 контроллер 1120 активирует вакуумные насосы 96, 1096A, 1096B, чтобы откачивать воздух в боковой и испытательных камерах 1084, 1088, чтобы имитировать космическое пространство. Контроллер 1120 может быть дополнительно выполнен с возможностью манипулировать клапаном 1092 из закрытой позиции в открытую позицию для введения OBP-системы 1082 в испытательную камеру 1088. В частности, OBP-система 1082 больше не является изолированной от испытательной камеры 1088, после того как клапан 1092 открылся. Кроме того, клапан 1092 может открываться только после того, как контроллер 1120 определил, что OBP-система 1082 правильно присоединена к узлу 1100 подачи/стенду измерения рабочих характеристик, и камера 1080 была вакуумирована, чтобы надлежащим образом имитировать космическое пространство. В этот момент OBP-система 1082 готова для испытания.
[0053] На шестом этапе 170 контроллер 1120 предоставляет возможность работы OBP-системы 1082. Как часть этого, контроллер 1120 выполнен с возможностью активировать узел 1105 подачи, чтобы предоставлять желаемые электрический сигнал(ы), текучую среду (например, ракетное топливо), газ или другие вещества из узла 1105 подачи в OBP-систему 1082 через интерфейсный узел 1014.
[0054] На седьмом этапе 174 динамометрический элемент тензометрического датчика или стенд обратного маятника или стенд торсионного маятника измеряет результирующую выходную тягу OBP-системы 1082. Этот этап 174 может дополнительно включать в себя измерение, с помощью диагностических зондов или датчиков 1098 (некоторые из которых могут быть расположены на стенде), и другие данные испытания рабочих характеристик, такие как температура, давление и т.д., в боковой и испытательной камерах 84, 88. Контроллер 1120, имеющий систему управления испытанием и записи данных, наблюдает и записывает данные рабочих характеристик, включающие в себя результирующую выходную тягу и связанные параметры (например, расход или интенсивность потребления ракетного топлива/текучей среды). Этот этап может дополнительно включать в себя создание отчета и/или аналитических графиков данных испытания рабочих характеристик. В частности, система управления испытанием и записи данных выполнен с возможностью создавать отчет из данных испытаний, чтобы подтверждать рабочие характеристики OBP-системы.
[0055] На восьмом этапе 178 контроллер отключает OBP-систему 1082. В частности, контроллер деактивирует прохождение электрических сигналов и текучих сред через узел 1105 подачи и к интерфейсному узлу 1014.
[0056] На девятом этапе 182 OBP-система 1082 удаляется из камеры 1080, после того как испытание завершено. Этот этап 182 может включать в себя деактивацию вакуумных насосов 1096 посредством контроллера 1120, чтобы возвращать давление в камере 1080 к атмосферному. Затем, контроллер 1120 может управлять манипуляторной системой 1026, чтобы перемещать роботизированную руку близко к опорному элементу 1028 (т.е., внешнему по отношению к или внутри боковой камеры 1084). Этот этап 182 может дополнительно включать в себя повторное присоединение роботизированной руки 1024 к монтажному элементу 1040 автоматически или с ручной помощью. Контроллер 1120 затем функционирует, чтобы управлять манипуляторной системой 1026, чтобы перемещать роботизированную руку 1204, чтобы возвращать интерфейсный узел 1014/OBP-систему 1082 к месту 1109 переноса, после чего OBP-система 1082 отсоединяется от интерфейсного узла 1014.
[0057] В других вариантах осуществления некоторые этапы или участки этапов могут быть выполнены в порядке, отличном от изложенного выше, или могут не выполняться совсем.
[0058] По существу, испытание OBP-системы 1082 является в значительной степени, если не целиком, автоматическим. В частности, контроллер 1120 или другая система управления функционирует, чтобы управлять выборочным соединением и перемещением манипуляторной системы 1026, устанавливать испытательную среду в камере 1080 с помощью вакуумных насосов 1096 и клапана 1092, передавать сигналы и материалы для испытания, такие как электрическую мощность и данные и жидкости, газы и т.д., в OBP-систему 1082 из испытательного оборудования 1022 и измерять и записывать данные испытания. По существу, все испытание OBP-системы 1082, от присоединения до отсоединения интерфейсного узла 1014, может быть выполнено менее чем за 8 часов. В других вариантах осуществления испытание может быть выполнено менее чем за 6 часов.
[0059] Настоящее изобретение обеспечивает автоматическое оборудование для испытания рабочих характеристик OBP, которое в значительной степени сокращает время, требуемое для проведения испытания рабочих характеристик, уменьшает или устраняет потребность во взаимодействии человека и помощи в выполнении испытания, уменьшает величину труда человека, требуемого для сбора и отчета о результатах испытания, уменьшает изменчивость между испытаниями, которая связана с ручным трудом человека, и предоставляет уникальный интерфейсный узел, который может размещать множество OBP-вариантов без модификации оборудования. Изобретение является пригодным для выполнения роботизированной и не требующей посторонней помощи операции, хотя операторы могут выполнять одну или несколько функций сборки или испытания. Система изобретения предоставляет возможность значительного уменьшения интервала времени и труда, требуемых для проведения испытания над OBP-системой.
[0060] Различные признаки изобретения излагаются в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С ДОЗАТОРОМ МЕДИЦИНСКИХ ПРЕПАРАТОВ | 2011 |
|
RU2559019C2 |
| СИСТЕМА ОЧИСТКИ ДРОБИЛКИ | 2011 |
|
RU2519954C2 |
| Система и способ управления конвейером в системе горных разработок | 2012 |
|
RU2606732C2 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ СКОРОСТИ | 2008 |
|
RU2480647C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ, СОДЕРЖАЩИЙ ЭЛЕКТРИЧЕСКУЮ СИСТЕМУ ЗАПУСКА, ПИТАЕМУЮ ЛИТИЙ-ИОННЫМ АККУМУЛЯТОРОМ | 2014 |
|
RU2616717C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ, СОДЕРЖАЩИЙ ЭЛЕКТРИЧЕСКУЮ СИСТЕМУ ЗАПУСКА, ПИТАЕМУЮ ЛИТИЙ-ИОННЫМ АККУМУЛЯТОРОМ | 2014 |
|
RU2659640C1 |
| ПРИБОР ДЛЯ АНАЛИЗА БИОЛОГИЧЕСКИХ ОБРАЗЦОВ И РЕАГЕНТОВ | 2015 |
|
RU2697877C2 |
| РЕНТАБЕЛЬНЫЙ КАРТРИДЖ ДЛЯ ПЛАЗМЕННО-ДУГОВОЙ ГОРЕЛКИ | 2016 |
|
RU2710818C2 |
| СТЕНОВОЙ МОДУЛЬ ДЛЯ СООРУЖЕНИЯ КОНСТРУКЦИИ, А ТАКЖЕ СООТВЕТСТВУЮЩАЯ КОНСТРУКЦИЯ | 2012 |
|
RU2615538C2 |
| УСТРОЙСТВО И СПОСОБ НАНЕСЕНИЯ ЖИДКОСТИ | 2009 |
|
RU2533584C9 |
Изобретение относится к автоматическому испытательному устройству и компонентам, связанным с испытательным оборудованием и имитационной камерой для спутниковой бортовой двигательной установки. Интерфейсный узел для присоединения бортовой двигательной установки к испытательному оборудованию включает в себя опорный элемент, выполненный с возможностью присоединения манипуляторной системы, и монтажный элемент, выполненный с возможностью присоединения к бортовой двигательной установке. Множество каналов протягивается между и соединяет монтажный элемент с опорным элементом. 5 н. и 13 з.п. ф-лы, 11 ил.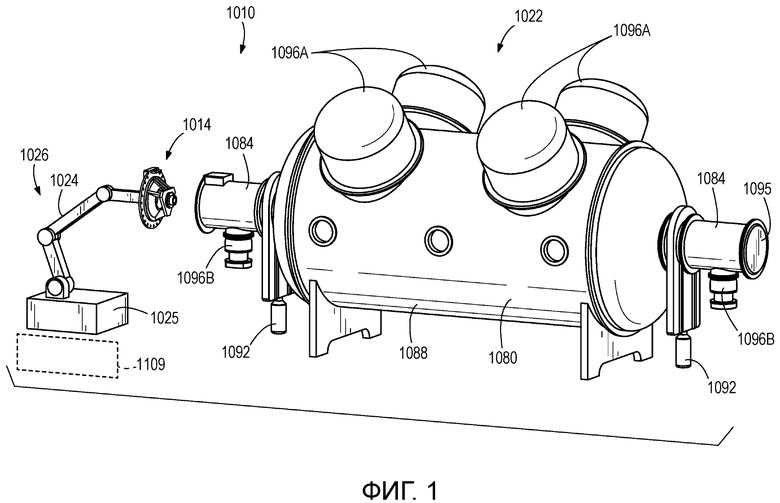
1. Интерфейсный узел для присоединения бортовой двигательной установки к испытательному оборудованию, интерфейсный узел содержит:
опорный элемент, выполненный с возможностью присоединения к манипуляторной системе для обеспечения движения опорного элемента;
монтажный элемент, выполненный с возможностью присоединения к бортовой двигательной установке; и
множество каналов, протягивающихся между и соединяющих монтажный элемент с опорным элементом.
2. Интерфейсный узел по п. 1, при этом множество каналов протягивается по меньшей мере частично в монтажном элементе.
3. Интерфейсный узел по п. 1, при этом множество каналов протягивается по меньшей мере частично в опорном элементе.
4. Интерфейсный узел по п. 2, при этом множество каналов протягивается по меньшей мере частично в опорном элементе.
5. Интерфейсный узел по п. 1, при этом опорный элемент имеет цилиндрическую форму и определяет продольную ось сквозь себя и при этом монтажный элемент располагается с интервалом от опорного элемента в осевом направлении.
6. Узел бортовой двигательной установки, содержащий:
интерфейсный узел по п. 1 и
бортовую двигательную установку, присоединенную к нему, бортовая двигательная установка выполнена с возможностью принимать текучую среду по меньшей мере через один канал из множества каналов.
7. Испытательный узел для присоединения бортовой двигательной установки к испытательному оборудованию, причем испытательный узел содержит:
интерфейсный узел по п. 1 и
манипуляторную систему, разъемным образом присоединяемую к одной стороне интерфейсного узла и выполненную с возможностью поступательно перемещать интерфейсный узел.
8. Испытательная система для испытания бортовой двигательной установки, причем испытательная система содержит:
резервуар;
вакуумный насос в функциональном сообщении с резервуаром;
множество датчиков, расположенных в резервуаре;
манипуляторную систему, участок которой является автоматически подвижным по направлению к и от резервуара; и
интерфейсный узел, включающий в себя
опорный элемент, выполненный с возможностью присоединения к манипуляторной системе,
монтажный элемент, выполненный с возможностью присоединения к бортовой двигательной установке, и
множество каналов, протягивающихся между и соединяющих монтажный элемент с опорным элементом.
9. Испытательная система по п. 8, при этом резервуар включает в себя стенку резервуара и при этом опорный элемент выполнен с возможностью зацепления со стенкой резервуара.
10. Испытательная система по п. 9, при этом опорный элемент выполнен таким образом, что, что после зацепления со стенкой резервуара монтажный элемент находится в сообщении с возможностью обмена текучей средой с источником текучей среды, внешним по отношению к резервуару.
11. Испытательная система по п. 8, при этом опорный элемент выполнен с возможностью полной вставки в резервуар.
12. Испытательная система по п. 8, при этом резервуар включает в себя первую камеру и вторую камеру, первая и вторая камеры разделяются клапаном.
13. Испытательная система по п. 12, при этом первая камера включает в себя систему измерения усилия, выполненную с возможностью измерения выходной тяги бортовой двигательной установки.
14. Способ для испытания бортовой двигательной установки в испытательном оборудовании, при этом способ содержит этапы, на которых:
присоединяют бортовую двигательную установку к монтажному элементу интерфейсного узла;
присоединяют монтажный элемент к опорному элементу интерфейсного узла посредством одного или более каналов;
присоединяют опорный элемент интерфейсного узла к манипуляторной системе;
перемещают, посредством манипуляторной системы, интерфейсный узел по направлению к камере испытательного оборудования, так что по меньшей мере участок интерфейсного узла находится в камере, при этом упомянутое перемещение, посредством манипуляторной системы, дополнительно включает в себя движение опорного элемента интерфейсного узла;
присоединяют интерфейсный узел испытательного оборудования, так что интерфейсный узел выполнен с возможностью приема текучей среды из испытательного оборудования;
отсоединяют манипуляторную систему от интерфейсного узла;
приводят в действие бортовую двигательную установку и
измеряют и записывают выходную тягу бортовой двигательной установки.
15. Способ по п. 14, в котором перемещение, посредством манипуляторной системы, интерфейсного узла по направлению к камере испытательного оборудования, так что по меньшей мере участок интерфейсного узла находится внутри камеры, включает в себя перемещение, посредством манипуляторной системы, интерфейсного узла полностью в камеру испытательного оборудования.
16. Способ по п. 14, в котором перемещение, посредством манипуляторной системы, интерфейсного узла по направлению к камере испытательного оборудования, так что по меньшей мере участок интерфейсного узла находится внутри камеры, включает в себя перемещение, посредством манипуляторной системы, интерфейсного узла по направлению к камере испытательного оборудования, чтобы зацеплять стенку камеры.
17. Способ по п. 14, дополнительно включающий в себя этап, на котором удаляют атмосферу в камере, чтобы имитировать космическое пространство.
18. Способ по п. 14, дополнительно включающий в себя этап, на котором перемещают, посредством манипуляторной системы, интерфейсный узел на расстояние от камеры испытательного оборудования, так что интерфейсный узел полностью находится за пределами камеры, и при этом этапы в данном способе осуществляются менее чем за 8 часов.
| CN 105067293 B, 17.08.2016 | |||
| US 20080314134 A1, 25.12.2008 | |||
| US 3572029 A1, 23.03.1971 | |||
| US 5152169 A1, 06.10.1992 | |||
| РАСПРЕДЕЛИТЕЛЬНЫЙ ПРИСОЕДИНИТЕЛЬНЫЙ МОДУЛЬ И СУБМОДУЛЬ | 2013 |
|
RU2631247C2 |
| ИСПЫТАТЕЛЬНЫЙ И МОНТАЖНЫЙ СТЕНД | 2010 |
|
RU2546913C2 |

