[0001] Настоящая заявка подтверждает преимущества и, таким образом, инкорпорирует во всей полноте ссылку на предварительную патентную заявку США No. 60/948,152, которая была подана 5 июля 2007 года.
Существующий уровень техники
Область изобретения
[0002] Область данного изобретения в целом относится к трансмиссиям, а более конкретно - к способам, сборке и узлам трансмиссий с бесступенчато регулируемыми скоростями (БИСТ).
[0003] Существуют хорошо известные способы достижения постоянно варьируемых соотношений скорости ведущего вала и скорости на выходном валу. Как правило, механизм для регулирования соотношения скоростей на выходном и ведущем валах БИСТ известен как вариатор. В приводного типа БИСТ вариатор состоит из двух раздвижных шкивов, соединенных приводом. Вариатор в одногнездовой БИСТ тороидального типа БИСТ обычно имеет два частично тороидальных трансмиссионных диска, вращающихся вокруг ствола, два или более дискообразных приводных ролика, вращающихся на соответствующих осях, перпендикулярных стволу и размещенных между ведущим и выходным валами трансмиссии. В общем случае необходимо иметь систему контроля вариатора для достижения в процессе функционирования желаемого соотношения скоростей.
[0004] Примеры осуществления известных вариаторов включают вариаторы сферической формы, использующие шарообразные регуляторы скорости (также известные как регуляторы мощности, шары, сателлиты, сферические приспособления или ролики), каждый из которых имеет установленную под углом ось вращения, адаптированную для регулировки необходимого для достижения в процессе функционирования желаемого соотношения скорости ведущего вала и скорости на выходном валу. Регуляторы скоростей размещены под углом в плоскости перпендикулярной продольной оси БИСТ. Регуляторы скоростей соприкасаются с одной стороны с входным диском, а с другой стороны - с выходным диском, один или оба из которых прилагают контактное нажатие на ролики для передачи вращающего момента. Входной диск преобразует подводимый вращающий момент в скорости вращения на входе регуляторов скоростей.
В то время как регуляторы скоростей вращаются вокруг своих собственных осей, они одновременно передают вращающийся момент на выходной диск. Соотношение скорости на выходе и на входе является функцией радиусов контактов на входном и выходном дисках и по отношению к оси регуляторов скоростей. Угол наклона осей регуляторов скоростей по отношению к оси вариатора приводит к регулированию соотношения скоростей.
[0005] В промышленности существует постоянная потребность в вариаторах и системах контроля для улучшения их работы и функционального контроля. Представленные здесь системы и способы предлагают решение указанной проблемы.
Сущность изобретения
[0006] Представленные системы и способы имеют некоторые признаки, ни один из которых в отдельности не обеспечивает желаемые свойства. Без ограничений представленных ниже пунктов формулы изобретения, самые значимые признаки изобретения будут кратко изложены ниже. После принятия во внимание этого обсуждения и, в частности, после ознакомления с разделом описания "Подробное представление примеров осуществления изобретения" станет понятным, как признаки системы и способов обеспечивают некоторые преимущества представленных системы и способов над традиционными.
[0007] Один из аспектов изобретения относится к способу контроля трансмиссии, включающей группу тяговых планетарных механизмов. Способ включает обеспечение каждого тягового планетарного механизма планетарной осью и придание угла наклона каждому тяговому планетарному механизму. По одному из примеров способ может также включать наклон каждого тягового планетарного механизма.
[0008] Другой аспект изобретения относится к способу контроля соотношения скоростей трансмиссии с бесступенчатым изменением скорости (БИСТ). Способ может включать снабжение группой тяговых планетарных механизмов и оснащение каждого тягового планетарного механизма планетарной осью. Каждый тяговый планетарный механизм может быть сконфигурирован для вращения вокруг соответствующей планетарной оси. В одном из примеров способ включает обеспечение первой крепежной плитой, которая сконфигурирована таким образом, что может быть скреплена с первым концом каждого тягового планетарного механизма. Первая крепежная плита может быть установлена вдоль продольной оси БИСТ. Способ может включать обеспечение второй крепежной плитой, которая сконфигурирована для скрепления со вторым концом каждой из планетарных осей. При этом вторая крепежная плита может быть установлена коаксиально первой крепежной плите. Способ также может включать установку первой крепежной плиты относительно второй крепежной плиты таким образом, что во время функционирования БИСТ первая крепежная плита может вращаться вокруг продольной оси относительно второй крепежной плиты.
[0009] Другой аспект изобретения относится к трансмиссии, имеющей комплект тяговых планетарных механизмов, установленных под углом к продольной оси трансмиссии. В одном из примеров трансмиссия снабжена набором планетарных валов. Каждый планетарный вал может быть функционально соединен с каждым тяговым планетарным механизмом. При этом каждый планетарный вал может определять угол наклона оси вращения для каждого тягового планетарного механизма. Каждый планетарный вал может быть сконфигурирован для углового смещения в первой и второй плоскостях. Трансмиссия может быть оснащена первой крепежной плитой, функционально соединенной с каждым планетарным валом. Первая крепежная плита может быть установлена у продольной оси. Трансмиссия может также иметь вторую крепежную плиту, функционально соединенную со вторым концом каждого из планетарных валов. Вторая крепежная плита может быть установлена у продольной оси. Первая и вторая крепежные плиты сконфигурированы для вращения вокруг продольной оси относительно друг друга.
[0010] Один из аспектов данного изобретения касается системы контроля бесступенчатой регулируемой трансмиссии (БИСТ), имеющей набор тяговых планетарных механизмов с наклонной осью вращения. Система контроля включает источник базового контроля, индицирующего желаемое функциональное состояние БИСТ. В одном из примеров система контроля также включает динамический модуль наклона, функционально связанный с источником базового контроля. Динамический модуль наклона может быть сконфигурирован для обеспечения регулировки наклонной оси вращения на основе, по меньшей мере, получения значения угла наклона.
[0011] Другой аспект данного изобретения касается способа контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей группу тяговых планетарных механизмов. Каждый из тяговых планетарных механизмов имеет планетарный вал, вокруг которого тяговые планетарные механизмы вращаются. Способ включает обеспечение базового контроля, индицирующего желаемое функциональное состояние БИСТ, и определение угла наклона на основе, по меньшей мере, желаемого функционального состояния БИСТ. В одном из примеров способ включает придание угла наклона каждому планетарному валу.
[0012] Еще один аспект изобретения касается способа контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей группу тяговых планетарных механизмов с наклонной осью вращения. Способ включает обеспечение базового контроля для индикации желаемого функционального состояния БИСТ и ее текущего функционального состояния. В одном из примеров способ включает сравнение желаемого функционального состояния с текущим функциональным состоянием для определения контрольной ошибки. Способ также включает обеспечение угла наклона каждой наклонной оси. Угол наклона оси основан, по меньшей мере, на полученном значении контрольной ошибки.
[0013] Другой аспект данного изобретения относится к способу контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей группу тяговых планетарных механизмов, установленных под углом к продольной оси БИСТ; каждый тяговый планетарный механизм смонтирован на планетарном валу для определения наклона оси вращения. БИСТ может иметь тяговую планетарную коробку передач в контакте с каждым тяговым планетарным механизмом. Тяговая планетарная коробка передач может быть сконфигурирована для аксиального перемещения. Способ включает присоединение тяговой планетарной коробки передач к блокиратору ее положения. Блокиратор может быть сконфигурирован для удерживания планетарной коробки передач в осевом положении. В одном из примеров способ включает обеспечение системы координатором угла наклона, который может быть функционально соединен с тяговыми планетарными механизмами и с тяговой планетарной коробкой передач. Координатор угла наклона может быть сконфигурирован для регулировки угла наклона планетарной оси.
[0014] Другой аспект изобретения относится к системе контроля трансмиссии, имеющей тяговую планетарную коробку передач и набор тяговых планетарных механизмов, каждый из которых имеет наклонную ось вращения. Система контроля имеет базовый источник контроля, сконфигурированный для обеспечения базового контроля по определению желаемого функционального состояния трансмиссии. В одном из примеров система контроля имеет источник обратной связи для обеспечения индикации текущего функционального состояния трансмиссии. Система контроля может иметь блокиратор положения тяговой планетарной коробки передач, функционально связанный с ней. Блокиратор положения тяговой планетарной коробки передач может быть сконфигурирован для селективного удерживания ее осевого положения. Система контроля может иметь координатор угла наклона, который функционально связан с тяговыми планетарными механизмами. Система контроля может также иметь модуль принятия решения, сконфигурированный для сравнения значения полученного в результате базового контроля и значения обратной связи. Модуль принятия решения может быть сконфигурирован таким образом, что он генерирует сигнал, основанный, по меньшей мере, на указанном выше сравнении. Сигнал формируется для передачи блокиратору планетарной коробки передач и координатору угла наклона.
[0015] Один из аспектов изобретения относится к системе контроля трансмиссии, имеющей тяговую планетарную коробку передач и группу тяговых планетарных механизмов, функционально связанных с крепежной плитой и тяговой планетарной коробкой передач. Система контроля включает контрольную базовую гайку, установленную коаксиально продольной оси БИСТ. В одном из примеров система контроля имеет кулачковый механизм обратной связи, функционально связанный с контрольной базовой гайкой и с тяговой планетарной коробкой передач. Кулачковый механизм обратной связи может быть установлен коаксиально контрольной базовой гайке. При этом крепежная плита установлена коаксиально кулачковому механизму обратной связи. Система контроля также включает наклонный кулачковый механизм, соединенный с кулачковым механизмом обратной связи и с крепежной плитой. Наклонный кулачковый механизм может быть сконфигурирован таким образом, что он может обеспечивать вращение крепежной плиты вокруг продольной оси.
[0016] Другой аспект данного изобретения относится к способу контроля трансмиссии с бесступенчатым изменением скорости (БИСТ). Способ имеет базовую систему контроля угла наклона и функционально связанный с ней узел нейтрализатора. Узел нейтрализатора может быть сконфигурирован для балансировки группы осевых усилий, формируемых в БИСТ в процессе ее функционирования.
[0017] Еще один аспект изобретения включает способ контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей тяговую планетарную коробку передач и группу тяговых планетарных механизмов, каждый из которых имеет наклонную ось вращения. Способ включает индикацию осевого усилия, передаваемого тяговой планетарной коробке передач в процессе функционирования БИСТ. В одном из примеров способ также включает действия по поддержанию усилия постоянной амплитуды и осевого усилия противоположного направления. Усилие может быть сформировано для функционального воздействия на тяговую планетарную коробку передач.
[0018] Один из аспектов изобретения относится к узлу нейтрализатора трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Узел нейтрализатора может быть снабжен первым элементом сопротивления, сформированным для генерирования усилия в первом аксиальном направлении. В одном из примеров реализации изобретения узел нейтрализатора имеет второй элемент сопротивления, сформированный для генерирования усилия во втором аксиальном направлении. Узел нейтрализатора может также содержать насадку переходного сопротивления, функционально связанную с базовой системой контроля угла наклона. Насадка переходного сопротивления может быть сформирована для раздельного взаимодействия с каждым из элементов сопротивления.
0019] Другой аспект изобретения относится к кулачковому механизму обратной связи для базовой системы контроля угла наклона. Кулачковый механизм обратной связи имеет в целом удлиненный цилиндрический корпус с первым и вторым концами. В одном из примеров кулачковый механизм обратной связи снабжен подшипником с обоймой, установленным на первом конце. Кулачковый механизм обратной связи также снабжен участком с резьбой, расположенным на первом конце, и шлицевым участком, расположенным на втором конце.
[0020] Еще один аспект изобретения относится к наклонному кулачковому механизму трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Наклонный кулачковый механизм имеет в целом удлиненный цилиндрический корпус с первым концом и вторым концом. В одном из примеров наклонный кулачковый механизм имеет первый участок с резьбой, расположенный вблизи первого конца. Наклонный кулачковый механизм имеет второй участок с резьбой, расположенный вблизи второго конца. Резьба, выполненная на первом участке, имеет шаг, больший, чем шаг резьбы, выполненной на втором участке.
[0021] Другой аспект изобретения относится к крепежной плите трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона и группу тяговых планетарных механизмов. Крепежная плита включает цилиндрический элемент и набор выгнутых поверхностей, сформированных на наружной лицевой поверхности цилиндрического элемента. Выгнутые поверхности адаптированы для функционального соединения с каждым тяговым планетарным механизмом. В одном из примеров крепежная плита имеет центральный канал с резьбой, выполненной для функционального крепления к системе базового контроля угла наклона. Крепежная плита может также иметь реактивную поверхность, ориентированную коаксиально центральному каналу. Реактивная поверхность может быть сформирована для функционального соединения с системой базового контроля угла наклона.
[0022] Другой аспект изобретения относится к опорном узлу трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Опорный узел включает опору, имеющую удлиненный корпус с первым и вторым концами. Опора имеет первый канал, сформированный на первом конце, и второй канал, сформированный в близости к первому концу. Второй канал может иметь первый и второй промежуточные каналы. Второй канал может быть ориентирован перпендикулярно первому. Опорный узел может также иметь переходную ось направляющего ролика, функционально соединенную со вторым каналом. Переходная ось направляющего ролика может быть адаптирована для вращения во втором канале.
[0023] Один из аспектов изобретения относится к опоре трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Опора имеет удлиненный корпус с первым и вторым концами. В одном из примеров опора имеет первый канал, сформированной на первом конце, и второй канал, сформированный в близости к первому концу. Второй канал может иметь также первый и второй промежуточные каналы. При этом второй канал может быть ориентирован перпендикулярно первому каналу. Опора может иметь также третий промежуточный канал, сформированный между первым и вторым промежуточными каналами. Третий промежуточный канал может быть сформирован для определения места вращения переходной оси направляющего ролика БИСТ.
[0024] Другой аспект изобретения касается трансмиссии, имеющей продольную ось. В одном из примеров трансмиссия имеет тяговую планетарную коробку передач, установленную коаксиально продольной оси. Тяговая планетарная коробка передач может быть сконфигурирована для осевого перемещения. Трансмиссия может иметь первую и вторую крепежные плиты, установленные коаксиально продольной оси. Тяговая планетарная коробка передач установлена между первой и второй крепежными плитами. Трансмиссия может иметь набор планетарных шестерен, функционально связанных со входом узла базового контроля. В одном из примеров трансмиссия имеет кулачковый механизм обратной связи, функционально связанный с набором планетарных переходных механизмов и с тяговой планетарной коробкой передач. Трансмиссия может иметь наклонный кулачковый механизм, функционально соединенный с набором планетарных шестерен и с первой крепежной плитой. Трансмиссия может также иметь первый и второй элементы сопротивления, функционально связанные с наклонным кулачковым механизмом. Первая крепежная плита сконфигурирована для вращения по отношению ко второй крепежной плите.
[0025] Другой аспект изобретения включает узел базового контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Узел базового контроля включает контрольную базовую гайку. Узел базового контроля может иметь первый и второй элементы сопротивления, присоединенные к контрольной базовой гайке. В одном из примеров узел базового контроля включает промежуточный реакционный элемент, соединенный с первым и вторым элементами сопротивления. Промежуточный реакционный элемент может быть установлен коаксиально и радиально изнутри контрольной базовой гайки. Вращение контрольной базовой гайки в первом направлении воздействует на первый элемент сопротивления. Вращение контрольной базовой гайки во втором направлении воздействует на второй элемент сопротивления.
[0026] Один из аспектов изобретения относится к узлу базового контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей систему базового контроля угла наклона. Узел базового контроля имеет контрольную базовую гайку. Узел базового контроля содержит первый и второй элементы сопротивления, соединенные с контрольной базовой гайкой. В одном из примеров узел базового контроля включает шкив, функционально соединенный с контрольной базовой гайкой. Узел базового контроля может иметь первый и второй тросы (тяговые канаты), каждый из которых присоединен к контрольной базовой гайке и к шкиву. Узел базового контроля может быть также снабжен пружинным сдерживающим элементом, соединенным со шкивом и с первым и вторым элементами сопротивления. Вращение контрольной базовой гайки в первом направлении разматывает первый трос со шкива. Вращение контрольной базовой гайки во втором направлении разматывает трос от шкива.
[0027] Другой аспект изобретения относится к трансмиссии, имеющей крепежную плиту, установленную коаксиально продольной оси трансмиссии. В одном из примеров трансмиссия включает группу тяговых планетарных механизмов, установленных под углом к продольной оси. Трансмиссия включает планетарную ось, функционально связанную с каждым тяговым планетарным механизмом. Планетарная ось определяет угол наклона оси вращения. Трансмиссия может включать планетарную поддерживающую крестовину, связанную с соответствующей осью. Планетарная поддерживающая крестовина имеет эксцентричный наклонный кулачковый механизм, сконфигурированный для соединения с крепежной плитой. Трансмиссия может также включать муфту, соединенную с планетарной поддерживающей крестовиной. Муфта может быть сконфигурирована для аксиального перемещения. Вращение муфты формирует угол наклона каждой планетарной оси.
[0028] Еще один аспект изобретения адресован к регулятору вращающего момента трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей набор тяговых планетарных механизмов с наклонно ориентированными осями вращения. Регулятор вращающего момента включает крепежную плиту, установленную коаксиально продольной оси БИСТ. В одном из примеров регулятор вращающего момента включает переходной кулачковый механизм, функционально связанный с крепежной плитой. Переходной кулачковый механизм имеет резьбовое удлинение. Регулятор вращающего момента оснащен первым реактивным плечом, соединенным с переходным кулачковым механизмом. При этом первое реактивное плечо может быть функционально связано с крепежной плитой. Первое реактивное плечо установлено коаксиально продольной оси. Регулятор вращающего момента включает второе реактивное плечо, функционально связанное с первым реактивным плечом. Первое и второе реактивные плечи сконфигурированы для обеспечения вращения крепежной плиты в процессе функционирования БИСТ.
[0029] В другом аспекте изобретение раскрывает способ регулировки соотношения скоростей трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей группу тяговых планетарных механизмов, размещенных под углом к продольной оси БИСТ. Каждый тяговый планетарный механизм установлен на планетарной оси для определения угла наклона оси вращения соответствующего тягового планетарного механизма. Способ включает действия по формированию угла наклона каждой планетарной оси.
[0030] Другой аспект изобретения относится к способу регулировки соотношения скоростей трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей группу тяговых планетарных механизмов, размещенных под углом к продольной оси БИСТ. Каждый тяговый планетарный механизм имеет наклонно установленную ось вращения. Способ включает действия по формированию угла наклона каждой оси вращения.
Краткое описание чертежей
[0031] Фигура 1А схематично представляет диаграмму скоростей детали сферической планетарной трансмиссии с бесступенчатым изменением скорости (БИСТ) в прямоугольной системе координат.
[0032] Фигура 1В является диаграммой некоторых относительно-координированных систем, имеющих отношение к системе координат, представленной на фигуре 1А.
[0033] Фигура 1C является схематичной диаграммой определенных кинематических соотношений скоростей между некоторыми контактирующими компонентами БИСТ, представленной на фигуре 1А.
[0034] На фигуре 1D представлен график зависимости, являющейся диаграммой отношения коэффициента тягового усилия к относительной скорости для типичной топливной жидкости и сферического контакта между компонентами БИСТ.
[0035] На фигуре 1Е представлена диаграмма усилий тягового планетарного механизма БИСТ, приведенного на фигуре 1А.
[0036] Фигура 1F схематично представляет диаграмму угла наклона тягового планетарного механизма БИСТ, представленного на фигуре 1А.
[0037] Фигура 2 является блок-схемой функционирования одного из примеров устройства, сконфигурированного для использования некоторых элементов изобретения представленной БИСТ и системы контроля угла наклона, а также раскрытых здесь способов.
[0038] На фигуре 3 в изометрии показаны некоторые компоненты БИСТ, сконфигурированные для регулировки угла наклона с целью обеспечения изменения угла наклона оси вращения тяговых планетарных механизмов.
[0039] На фигуре 4 представлена блок-схема функционирования примера выполнения системы контроля угла наклона, которая может быть использована, например, в передвижных устройствах, представленных на фигуре 2.
[0040] Фигура 5А является схематичной диаграммой другого примера выполнения системы контроля угла наклона, которая может быть использована, например, в передвижных устройствах, представленных на фигуре 2.
[0041] Фигура 5В является схематичной диаграммой еще одного примера выполнения системы контроля угла наклона, которая может быть использована, например, в передвижных устройствах, представленных на фигуре 2.
[0042] Фигура 5С является схематичной диаграммой одного или более примеров выполнения систем контроля угла наклона, которые могут быть использованы, например, в передвижных устройствах, представленных на фигуре 2.
[0043] Фигура 6 является видом разреза БИСТ, сконфигурированной для формирования угла наклона с целью регулировки соотношения скоростей БИСТ.
[0044] Фигура 7 является видом, совмещенным с разрезом изображения некоторых компонентов БИСТ, показанных на фигуре 6. Для ясности иллюстрации БИСТ показана на двух страницах; плоскость, перпендикулярная оси ведущего вала БИСТ и проходящая через центр тягового планетарного механизма, разделяет БИСТ на две секции.
[0045] Фигура 8 является видом, совмещенным с разрезом изображения некоторых компонентов БИСТ, показанной на фигуре 6. Фигура 8 является вторым видом в разрезе иллюстрируемой БИСТ, который дополняет секцию, показанную на фигуре 7.
[0046] Фигура 9 является видом в перспективе сборки планетарно-опорного узла, который может быть использован с БИСТ, представленной на фигуре 6.
[0047] Фигура 10 является видом поперечного разреза планетарно-опорного узла, представленного на фигуре 9.
[0048] Фигура 11 является узлом А вида БИСТ, представленной на фигуре 6.
[0049] Фигура 12 является узлом Б вида БИСТ, представленной на фигуре 6.
[0050] На фигуре 13 показан вид в перспективе ведущего вала, который может быть использован с БИСТ, показанной на фигуре 6.
[0051] Фигура 14 является видом продольного разреза ведущего вала, представленного на фигуре 13.
[0052] Фигура 15 является видом в перспективе кулачкового механизма обратной связи, который может быть использован с БИСТ, представленной на фигуре 6.
[0053] Фигура 16 является видом продольного разреза кулачкового механизма обратной связи, представленного на фигуре 15.
[0054] Фигура 17 является видом в перспективе наклонного кулачкового механизма, который может быть использован с БИСТ, представленной на фигуре 6.
[0055] Фигура 18 является видом продольного разреза наклонного кулачкового механизма, представленного на фигуре 17.
[0056] Фигура 19 является видом в перспективе крепежной пластины, которая может быть использована с БИСТ, представленной на фигуре 6.
[0057] Фигура 20 является видом продольного разреза крепежной пластины, представленной на фигуре 19.
[0058] На фигуре 21 показан вид, совмещенный с разрезом изображения переключателя кулачкового механизма, который может быть использован с БИСТ, представленной на фигуре 6.
[0059] Фигура 22 является видом в перспективе опорного узла, который может быть применен в некоторых примерах БИСТ, использующих контроль угла наклона.
[0060] Фигура 23 является видом поперечного разреза некоторых компонентов опорного узла, представленного на фигуре 22.
[0061] Фигура 24 является видом продольного разреза другого примера выполнения БИСТ, сконфигурированной для использования регулировки угла наклона с целью последующей регулировки угла вращения тяговых планетарных механизмов БИСТ.
[0062] На фигуре 25 показан вид, совмещенный с разрезом изображения некоторых компонентов БИСТ, изображенной на фигуре 24.
[0063] Фигура 26 является узлом В вида БИСТ, представленной на фигуре 24.
[0064] Фигура 27 является видом в перспективе главной оси, которая может быть использована с БИСТ, показанной на фигуре 24.
[0065] Фигура 28 является видом в перспективе кулачкового механизма обратной связи, который может быть использован с БИСТ, показаной на фигуре 24.
[0066] Фигура 29 является видом продольного разреза кулачкового механизма, представленного на фигуре 28.
[0067] Фигура 30 является видом продольного разреза еще одного примера БИСТ, сконфигурированной для регулировки угла наклона с последующей регулировкой соотношения скоростей.
[0068] На фигуре 31 показан вид, совмещенный с продольным разрезом изображения некоторых компонентов БИСТ, представленной на фигуре 30.
[0069] Фигура 32 является узлом Г вида БИСТ, показанной на фигуре 30.
[0070] Фигура 33 является видом в перспективе кулачкового механизма обратной связи, который может быть использован с БИСТ, представленной на фигуре 30.
[0071] Фигура 34 является видом продольного разреза кулачкового механизма обратной связи, представленного на фигуре 33.
[0072] На фигуре 35 показан вид, совмещенный с продольным разрезом изображения переключателя кулачкового механизма, который может быть использован с БИСТ, представленной на фигуре 30.
[0073] Фигура 36 является видом продольного разреза некоторых компонентов примера осуществления БИСТ, имеющей систему базового контроля угла наклона и узел нейтрализатора.
[0074] Фигура 37 является видом продольного разреза некоторых компонентов еще одного примера осуществления БИСТ, имеющей базовую систему контроля угла наклона и узел нейтрализатора.
[0075] Фигура 38 является узлом Д вида БИСТ, представленной на фигуре 37.
[0076] Фигура 39 является видом продольного разреза некоторых компонентов еще одного примера осуществления БИСТ, имеющей базовую систему контроля угла наклона и узел нейтрализатора.
[0077] Фигура 40 является узлом Е вида БИСТ, представленной на фигуре 39.
[0078] Фигура 41 является видом продольного разреза еще одного примера осуществления БИСТ, имеющей базовую систему контроля угла наклона и узел нейтрализатора.
[0079] На фигуре 42 показан вид, совмещенный с продольным разрезом узла базового контроля, который может быть использован с БИСТ, показанной на фигуре 41.
[0080] Фигура 43 является видом продольного разреза узла базового контроля, представленного на фигуре 42.
[0081] Фигура 44 является видом сверху контрольной базовой гайки, которая может быть использована в узле базового контроля, представленном на фигуре 43.
[0082] На фигуре 45 представлен вид в перспективе продольного разреза промежуточного реактивного элемента, который может быть использован с узлом базового контроля, представленным на фигуре 43.
[0083] На фигуре 46 показан вид, совмещенный с продольным разрезом контрольной базовой гайки, представленной на фигуре 44.
[0084] Фигура 47 является узлом Ж вида БИСТ, представленной на фигуре 41.
[0085] Фигура 48 является видом продольного разреза еще одного примера осуществления БИСТ, имеющей базовую систему контроля угла наклона.
[0086] Фигура 49 является узлом К вида БИСТ, представленной на фигуре 48.
[0087] На фигуре 50 показан вид, совмещенный с частичным продольно-поперечным разрезом некоторых компонентов БИСТ, показанной на фигуре 48.
[0088] Фигура 51А является частично увеличенным видом сверху некоторых компонентов примера БИСТ, имеющих базовую систему контроля угла наклона.
[0089] Фигура 51В является другим видом сверху БИСТ, показанной на фигуре 51А.
[0090] Фигура 52 является видом продольного разреза БИСТ, показанной на фигуре 51А.
[0091] Фигура 53А является узлом Л вида БИСТ, показанной на фигуре 51А.
[0092] Фигура 53В является узлом М вида БИСТ, показанной на фигуре 51А.
[0093] Фигура 54 является увеличенным видом в перспективе БИСТ, представленной на фигуре 51А.
[0094] Фигура 55 является видом в перспективе муфты для использования кулачкового механизма с БИСТ, показанной на фигуре 51А.
[0095] На фигуре 56 показан вид, совмещенный с продольным разрезом планетарной поддерживающей опоры, которая может быть использована с БИСТ, показанной на фигуре 51А.
[0096] Фигура 57 является видом сверху регулятора вращающего момента.
[0097] Фигура 58 является видом продольного разреза регулятора вращающего момента, представленного на фигуре 57.
Подробное описание некоторых примеров осуществления изобретения
[0098] Предпочтительные примеры осуществления изобретения будут далее раскрыты со ссылками на чертежи, в которых используется сквозная нумерация элементов. Используемая ниже терминология не должна быть интерпретирована с ограничениями или в запретительной манере, поскольку она используется для связи с подробным описанием определенных специфических примеров осуществления изобретения. Более того, примеры осуществления изобретения могут включать некоторые новые признаки, ни один из которых в отдельности не обеспечивает желаемый результат или является существенным для использования представленных вариантов изобретения. Некоторые представленные здесь примеры осуществления БИСТ в общем виде относятся к патентам США No. 6,241,636; 6,419,608; 6,689,012; 7,011,600; 7,166,052; патентным заявкам США No. 11.243,484 и 11.543,311, а также к заявке PCT/IB2006/054911, которая была подана 18 декабря 2006 года. Полное описание каждого из этих патентов и патентных заявок представлено здесь в виде ссылки.
[0099] Используемые здесь термины "функционально связанные", "функционально соединенные", а также термины, относящиеся к взаимосвязи между элементами (механический, связанный, сцепленный и т.д.) при функционировании одного элемента, относятся к соответствующим, последующим и одновременным функциональным результатам или к приведению в действие другого элемента. Следует отметить, что использование указанных терминов для раскрытия примеров осуществления заявленного изобретения, специфических структур или механизмов в их соединении или связях является типичным. Однако если специально не разъяснено использование указанного термина, в этом случае термин означает реальное соединение или сцепление и может иметь различные формы, которые при определенных обстоятельствах будут понятны человеку с ординарным уровнем знаний в данной технологической области.
[0100] В целях описания термин "радиальный" использован здесь для индикации направления или положения, которые перпендикулярны продольной оси трансмиссии или вариатора. Термин "осевой" использован здесь для отсылки к направлению или положению вдоль оси, которая параллельна главной, или продольной оси трансмиссии или вариатора. Для разъяснения или сокращения иногда схожие компоненты обозначены похоже (например, контрольный поршень 582А и контрольный поршень 582В), будут представлены объединенным единым названием (например, контрольный поршень 582).
[0101] Следует отметить, что отсылка к термину "тяговое усилие" не исключает случаи, в которых доминирующим или исключительным термином для раскрытия формы передачи энергии может быть использован термин "трение". Не имея намерения установить категорическое различие между тяговым усилием и трением движения, в общем случае эти термины могут быть поняты как различия в режимах преобразования энергии. Тяговое усилие при движении обычно влечет за собой преобразование энергии между двумя элементами путем смещения силовых усилий в тонком слое жидкости между элементами. Жидкости, используемые в этих случаях, представляют собой жидкости с коэффициентом тягового усилия, большим, чем в принятых минеральных маслах. Коэффициент тягового усилия (µ) представляет собой максимум тяговых усилий, которые были бы возможны в разделительных поверхностях контактирующих компонентов, и является мерой максимально возможного вращающего момента движения. В общем случае трение относится к передаче энергии между двумя взаимодействующими элементами путем силового усилия трения между элементами. С целью раскрытия данного изобретения это следует понимать таким образом, что БИСТ, представленная здесь, может функционировать как в режиме тягового усилия, так и в режиме трения. Например, в примере БИСТ, где использована для велосипеда, БИСТ может функционировать как в режиме трения, так и в режиме тяговой передачи, в зависимости от вращающего момента и скоростных условий, сопровождающих процесс функционирования.
[0102] Примеры осуществления изобретения, представленные здесь, относятся к контролю вариатора и/или БИСТ, имеющих в целом сферические планетарные механизмы, каждый из которых оснащен наклонно установленной осью вращения с возможностью регулирования угла ее наклона для достижения желаемого соотношения скоростей на входе и выходе в процессе функционирования. В некоторых примерах осуществления изобретения регулировка указанных осей вращения включает угловое перемещение планетарной оси в одной плоскости для достижения угловой регулировки планетарной оси во второй плоскости и, как следствие, регулировки соотношения скоростей вариатора. Угловое перемещение в первой плоскости представлено здесь термином "наклон" или "угол наклона". В другом примере система контроля координирует использование угла наклона для генерирования усилий между определенными контактирующими элементами вариатора с целью изменения угла наклона планетарных осей вращения. Наклон планетарных осей вращения регулирует соотношение скоростей вариатора. В представленном ниже описании система координат установлена по отношению к тяговому планетарному механизму; далее обсуждаются некоторые кинематические соотношения между контактирующими компонентами, генерирующими усилия, которые приводят к изменению угла наклона планетарных осей. Далее будут рассмотрены примеры осуществления систем контроля угла наклона для достижения желаемого соотношения скоростей вариатора.
[0103] На фигурах 1А и 1В представлены системы координат, которые использованы в примерах осуществления некоторых компонентов трансмиссии с бесступенчатым изменением скорости (БИСТ). Системы координат, представленные здесь для иллюстративных целей, не должны быть интерпретированы как единственно возможные. Пример БИСТ 100 включает в общем сферические планетарные механизмы 108 в контакте с тяговой планетарной коробкой передач 110. Тяговые планетарные механизмы 108 также находятся в контакте с первым тяговым кольцом 102 и со вторым тяговым кольцом 104 в соответственно первой угловой позиции 112 и во второй угловой позиции 114. Ортогональная система координат 150 (т.е. xg, yg, zg) и планетарно-центрированная система координат 160 (т.е. х, y, z) представлены на фигуре 1. Ортогональная система координат 150 является в целом ориентированной по отношению к продольной оси или главной приводной оси 152 БИСТ 100, для примера, ось zg совпадает с главной осью движения 152, вокруг которой установлены тяговые планетарные механизмы 108. Планетарно-центрированная система координат 160 базируется в геометрическом центре тяговых планетарных механизмов 108 с осью y, разделяющей угол, образованный тяговыми кольцами 102, 104, и осью z, в общем случае параллельной главной оси движения 152. Каждый из тяговых планетарных механизмов 108 имеет ось вращения, т.е. планетарную ось 106, которая может быть сформирована для наклона в y-z плоскости для формирования угла наклона 118 (иногда представляемый здесь как γ). Угол наклона 118 определяет кинематическое соотношение скоростей между тяговыми кольцами 102 и 104. Каждый из тяговых планетарных механизмов 108 имеет скорость вращения вокруг планетарной оси 106, представленную на фигуре 1А как угловая скорость 122, иногда представляемая здесь как ω. Обычно планетарная ось 106 соответствует планетарной оси, которая функционально связана с крепежной плитой или платформой (не показана), и может быть стационарной, в то время как в другом примере осуществления изобретения планетарная ось связана с крепежной плитой (не показана), которая вращается вокруг главной оси 152. В планетарно-центрированной системе координат ось х направлена ортогонально плоскости страницы, а ось z в общем случае параллельна главной оси движения 152; как следствие, угол наклона 118 в общем случае является копланарным по отношению к главной оси движения 152.
[0104] На фигуре 1В представлена планетарно-центрированная система координат 160 для дальнейшей иллюстрации угловой регулировки планетарной оси 106, используемой в примерах осуществления систем контроля угла наклона. Как показано на фигуре 1В, угол наклона 118 может быть образован вращением системы координат 160 с планетарной осью 106 в y-z плоскости вокруг оси х для формирования первой относительной системы координат 170 (х', y', z'). В относительной системе координат 170 планетарная ось 106 совпадает с z' осью. Путем вращения системы координат 170 с планетарной осью 106 вокруг оси у угол наклона 120 (иногда представляемый здесь как ζ может быть получен в x'-z' плоскости, определяемой здесь как вторая относительная система координат 180 (х'', у'', z''). Угол наклона 120 может считаться приблизительно проекцией в x-z углового варьирования планетарной оси 106. Более точно, угол наклона 120 является угловым положением планетарной оси 106 в x-z плоскости, как это определяется относительными системами координат 170 и 180. Угол наклона 120 в общем случае не является копланарным по отношению к основной оси движения 152. В некоторых примерах БИСТ 100 угол наклона 118 может регулироваться посредством прямой регулировки отношения скоростей. В одном из примеров БИСТ 100 угол наклона 118 контролируется, по меньшей мере, за счет регулировки угла наклона 120.
[0105] На фигуре 1C графически показаны кинематические соотношения между контактирующими компонентами БИСТ 100, а также раскрыто, каким образом придание наклонного положения генерирует силовое воздействие, направленное на регулировку угла наклона 118. Как это представлено здесь, фраза "наклонное положение" относится к установлению планетарной оси 106 относительно главной оси движения 152 таким образом, чтобы угол наклона 120 не равнялся нулю. Следовательно, отсылка к фразе "придание наклонного положения" подразумевает придание угла наклона планетарной оси 106 для получения отличного от нуля значения угла 120. Следует иметь в виду, что в некоторых примерах осуществления БИСТ 100 определенные пружинные усилия также воздействуют на тяговый механизм 108. Пружина является хорошо известным явлением тягового контакта для лиц с ординарным уровнем знаний в области, относящейся к рассматриваемой технологии. Для нашего непосредственного обсуждения результаты пружинных усилий будут опущены. Однако далее в примерах БИСТ будут приняты во внимание результаты пружинных усилий, воздействующих на тяговый планетарный механизм 108 и компоненты, функционально связанные с тяговым планетарным механизмом 108. В БИСТ 100 компоненты контактируют с тяговым планетарным механизмом 108 на трех участках, где формируются тяговые усилия или трение в зоне контакта. Первое кольцо 102 обеспечивает движение планетарного механизма 108 в зоне контакта 1, при этом планетарный механизм 108 передает энергию второму кольцу 104 в зоне контакта 2. Тяговая планетарная коробка передач 110 поддерживает тяговый планетарный механизм 108 в зоне контакта 3.
Для обсуждения три зоны контакта 1, 2, 3 на фигуре 1C представлены в плоскости x''-z'' как вид сверху БИСТ 100 или как вид А на фигуре 1А. Поскольку зоны контакта 1, 2, 3 не являются компланарными, контактно-центрированные системы координат представлены на фигуре 1C таким образом, что зоны контакта 1, 2, 3 могут быть проиллюстрированы в x-z плоскости. Подстрочные индексы 1, 2 и 3 использованы для обозначения специфической зоны контакта для контактно-центрированных систем координат. Оси z1,2,3 направлены к центру тягового планетарного механизма 108.
[0106] Обращаясь к контактной зоне 1 на фигуре 1C, поверхностная скорость первого тягового кольца 102 представлена в отрицательном направлении оси x1 вектором Vr1, поверхностная скорость планетарного механизма 108 представлена вектором Vp1; угол между векторами Vr1 и Vp1 является углом наклона 120. Результирующая относительная поверхностная скорость между тяговым кольцом 102 и тяговым планетарным механизмом 108 представлена вектором Vr1/р. В зоне контакта 3 между тяговым планетарным механизмом 108 и тяговой планетарной коробкой передач 110 поверхностная скорость тяговой планетарной коробки передач 110 представлена вектором Vsv, a поверхностная скорость тягового планетарного механизма 108 представлена вектором Vps; угол, образованный векторами Vsv и Vps, является углом наклона 120. Относительная поверхностная скорость тягового планетарного механизма и тяговой планетарной коробки передач 110 представлена вектором Vsv/p. Аналогично для контакта 2, поверхностная скорость тягового планетарного механизма в зоне контакта 2 представлена вектором Vp2, а поверхностная скорость тягового кольца 104 представлена вектором Vr2; угол, образованный векторами Vp2 и Vr2, является углом 120. Относительная поверхностная скорость тягового планетарного механизма 108 и второго тягового кольца 104 представлена вектором Vr2/р.
[0107] Кинематические соотношения, которые обсуждались выше, используются для формирования силового усилия на контактирующие компоненты. Фигура 1D демонстрирует зависимость усилий, которые могут возникать в зонах контакта 1, 2, 3. График иллюстрирует соотношение между тяговым коэффициентом µ и относительной скоростью между контактирующими компонентами. Тяговый коэффициент µ является индикацией объема жидкости, используемой для передачи силового усилия. Относительная скорость, такая как Vr1/p, может быть функцией угла наклона 120. Тяговый коэффициент µ является вектором суммирования тягового коэффициента по оси х- µx и коэффициента трения по оси y- µу в контактных зонах 1, 2, 3. В общем случае, тяговый коэффициент µ является функцией, помимо прочего, характеристик текучей среды, силовых усилий в зоне контакта и скорости текучей среды в зоне контакта. Для данной текучей среды тяговый коэффициент µ увеличивается с увеличением относительных скоростей компонентов до достижения тяговым коэффициентом µ максимального значения, после чего тяговый коэффициент µ уменьшается. Как следствие, при наличии угла наклона 120 (т.е. в условиях наклона) силовые усилия генерируются в зонах контакта 1, 2, 3 вокруг тягового планетарного механизма 108 в соответствии с кинематическими условиями. Обращаясь к фигурам 1C и 1Е, можно видеть, что Vr1/p генерирует силовое усилие Fs1, параллельное Vr1/p. Увеличение угла наклона 120 увеличивает Vr1/p и, как следствие, увеличивает силовое усилие Fs1 в соответствии с общими соотношениями, представленными на фигуре 1D. Vsv/p генерирует силовое усилие Fss и аналогично Vr2/p генерирует силовое усилие Fs2. Силовые усилия Fs1, Fss и Fs2 объединены для создания результирующего момента тягового ролика 108 в плоскости y-z. Более точно, суммирование моментов тягового ролика 108 равно
∑M=R·(Fs1+Fs2+Fss),
где R является радиусом тягового ролика 108, а силовые усилия Fs1, Fs2 и Fss являются результирующими силовыми усилиями контактирующих компонентов в y-z плоскости.
Иногда рассматриваемые здесь контактные усилия по приданию угла наклона в указанном выше уравнении могут быть представлены следующим образом:
Fs1=µy1N1, Fs2=µy2N2, Fss=µysN3,
где N1,2,3 является нормальным силовым усилием в соответствующих зонах контакта 1, 2, 3. Поскольку тяговый коэффициент µ является функцией относительной скорости контактирующих компонентов, тяговые коэффициенты µу1, µу2 и µys часто являются функцией угла наклона 120 как результат кинематических соотношений. По определению, момент является ускорением инерции; следовательно, в иллюстрируемом примере момент будет генерировать угловое ускорение y''. Таким образом, степень изменения углового ускорения y' является функцией угла наклона 120.
[0108] Как указывалось выше, в зонах контакта могут формироваться пружинные силовые усилия, направленные на создание сопротивления наклонным силовым усилиям. В одном из примеров БИСТ пружинно-индуцированные усилия и наклонно-индуцированные усилия могут взаимодействовать аксиально через тяговую планетарную коробку передач 110, иногда называемые здесь осевыми или боковыми усилиями. В примерах БИСТ 100 может быть сконфигурирована таким образом, что планетарная ось 106 наклоняется, когда наклонно-индуцированные усилия больше, чем пружинно-индуцированные. В одном из примеров БИСТ в устойчивом функциональном состоянии наклонно-индуцированные усилия могут уравновешивать друг друга, что приводит в результате к функционированию БИСТ в условиях наклона. Для функционирования БИСТ в условиях, когда угол наклона существенно близок к нулю, предпочтительно обеспечивать дополнительно боковое усилие для воздействия на тяговую планетарную коробку передач 110; таким образом, в некоторых примерах БИСТ осевое положение тяговой планетарной коробки передач 110 удерживается аксиально механизмом, иным, чем наклонно-индуцируемые силовые усилия.
[0109] На фигуре 1F тяговый планетарный механизм 108 иллюстрируется наличием угла наклона 118, равного нулю, что приводит к копланарности планетарной оси 106 по отношению к главной оси движения 152 БИСТ 100, при этом вектор скорости вращения 122 тягового планетарного механизма 108 коаксиален оси z. Угол наклона 120 может быть сформирован в x-z плоскости для генерирования силовых усилий с целью изменения угла наклона 118. При наличии угла наклона 120 тяговый планетарный механизм 108 имел бы скорость вращения 122 вокруг оси z'', а угол наклона 118 был бы сформирован в y-z' плоскости.
[0110] На фигурах 2-5В иллюстрируются примеры некоторых систем контроля БИСТ, которые основаны на формировании наклонного положения для мотивации изменения угла наклона 118, будут представлены ниже. На фигуре 2 схематично показан привод 25, который включает БИСТ 300, функционально закрепленную между основным двигателем 50 и отвесом 75. Привод 25 может также включать систему базового контроля угла наклона 200.
Обычно основной двигатель 50 снабжает энергией БИСТ 300, а далее БИСТ 300 передает энергию отвесу 75. Основной двигатель 50 может представлять собой один или более вариантов устройств для генерации энергии, а отвес 75 может представлять собой один или более вариантов устройств с механическим приводом или компонентами. Примеры основных двигателей 50 включают, но не ограничены этим, человеческую энергию, приводы, моторы и т.д. Примеры отвесов включают, но не ограничены, различные тормозные устройства, отключающие энергию узлы, узлы генераторов, вакуумные устройства и т.д. В некоторых примерах система контроля наклона 200 может координировать функционирование как БИСТ 300, так и отвеса 75 или может координировать функционирование всех элементов в приводном аппарате 25. В примере изобретения, представленном на фигуре 2, система контроля наклона 200 может быть сконфигурирована для использования при регулировке угла наклона 120 для дальнейшего контроля функционального состояния БИСТ 300 и, как следствие, осуществлять координацию контроля привода 25.
[0111] На фигуре 3 представлен пример осуществления БИСТ 301. Для ясности и краткости описания на ней представлены только отдельные компоненты вариатора или БИСТ. В иллюстрируемом примере наклонный рычаг 302 может быть функционально соединен с крепежной плитой 304 таким образом, чтобы вращение наклонного рычага 302 вызывало вращение крепежной плиты относительно ведущего вала 312. Вторая крепежная плита 306 жестко соединена с несущим валом 312. Тяговый планетарный узел 311 и тяговая планетарная коробка передач 310 установлены для функционирования между двумя крепежными плитами 304 и 306. Один конец планетарной оси 106 функционально соединен с крепежной плитой 304, а другой конец планетарной оси 106 функционально соединен с крепежной плитой 306. Планетарно-центрированная система координат 160 показана в планетарном узле 308 на фигуре 3 для ссылки. Угловое вращение наклонного рычага 302 приводит к вращению крепежной плиты 304 относительно крепежной плиты 324 (иногда обозначаемое как угол поворота крепежной плиты β). Поскольку планетарная ось 106 сдерживается крепежными плитами 304 и 306, планетарная ось 106 будет регулироваться в позиции, которая более не является копланарной по отношению к ведущему валу 312, что приводит к индуцированию условий наклона.
[0112] В некоторых случаях линейные отношения между осевым перемещением тяговой планетарной коробки передач 310 и углом наклона 118 могут быть выражены следующим образом. Осевое перемещение тяговой планетарной коробки передач 310 является математическим результатом радиусов тяговых планетарных механизмов 308, углом наклона 118 и РСФ (т.е. осевое перемещение тяговой планетарной коробки передач 310 = планетарному радиусу · угол наклона 118 · РСФ), где РСФ является фактором углового колебательного движения подрессоренных частей относительно оси, расположенной в продольной плоскости симметрии. РСФ описывает коэффициент ползучести при перемещении между тяговым планетарным механизмом 308 и тяговой планетарной коробкой передач 310; использованный здесь термин "ползучесть" относится к дискретному локальному движению тела относительно другого тела и иллюстрируется относительными скоростями вращения контактирующих компонентов, упомянутых выше. В тяговых приводах передача энергии от одного приводного элемента к другому за счет взаимного тягового влияния требует учитывать ползучесть. Обычно ползучесть в направлении передачи энергии понимают как "ползучесть в направлении вращения". Иногда привод и элементы привода испытывают деформацию ползучести в направлении, ортогональном направлению передачи энергии, в таких случаях компонент ползучести обозначают термином "ползучесть движения". В процессе функционирования БИСТ 301 тяговый планетарный механизм 308 и тяговая планетарная коробка передач 310 вращаются относительно друг друга. Когда тяговая планетарная коробка передач 310 перемещается аксиально (т.е. ортогонально к направлению вращения), возникает движение ползучести между тяговой планетарной коробкой передач 310 и тяговым планетарным механизмом 308. РСФ, равный 1.0, индицирует чистое вращение. При значениях РСФ менее 1.0 тяговая планетарная коробка передач 310 движется медленнее, чем вращается тяговый планетарный механизм 308. В случае когда значение РСФ превышает 1.0, тяговая планетарная коробка передач 310 движется быстрее, чем вращается тяговый планетарный механизм 308.
[0113] На фигуре 4 представлена блок-схема примера выполнения базовой системы контроля угла наклона 205, которая может быть использована с приводом 25. В одном примере система контроля базового угла наклона 205 может включать динамический модуль наклона 202, который может быть определен, например, как функция перехода. Динамический модуль наклона 202 использует ранее представленные кинематические соотношения между углом наклона 120 и генерируемыми силовыми усилиями, направленными на регулировку угла наклона 118. В некоторых примерах функциональное состояние БИСТ 300 может быть использовано на входе динамического модуля наклона 202 и может быть в общем виде представлено нормальным силовым усилием (т.е. FN) в зонах контакта и угловыми скоростями вращения ω тягового планетарного механизма 308. Контрольной базой 208 может быть желаемый угол наклона 120, например, значение контрольной базы 208 сравнивают со значением, полученным при обратной связи 201 в узле суммирования 210. Значение, полученное в процессе обратной связи, является индикатором реального угла наклона при текущих функциональных условиях. Результирующий угол наклона ζ передается динамическому модулю наклона, который определяет степень изменения угла наклона γ'; интеграция γ' в интеграторе 204 определяется углом наклона γ. В одном примере угол наклона γ далее обрабатывается в усилителе (K) 2050 для обеспечения обратной связи в узле суммирования 210. В некоторых примерах контрольная база 208 может быть базовой позицией тяговой планетарной коробки передач 110, желаемым углом наклона γ или любом другим параметром, относящимся к функционированию БИСТ 300, таким как соотношение скоростей или соотношение моментов вращения. В некоторых примерах контрольная база 208 может быть переведена в положение, необходимое для обеспечения базового угла наклона ζR.
[0114] На фигуре 5А представлена блок-схема системы наклонного контроля 2. Контрольная база 208 может быть угловой базовой позицией, такой как вращение смещенной гайки или базового диска, которые могут быть соединены с набором планетарных шестерен, имеющих отношение скоростей (K1) 500. Угловое положение набора планетарных шестерен может быть трансформировано в аксиальное перемещение базового элемента путем использования, например, шаг наклона (K2) 502 и может сравниваться с аксиальным положением тяговой планетарной коробки передач 110 (снова, к примеру, для получения контрольной ошибки 408). В некоторых примерах осевое положение, такое как осевая позиция переходного стержня (не показан), может быть использовано как контрольная база 208. В примере, представленном на фигуре 5А, контрольную базу 208 сравнивают с данными обратной связи 404, которая в данном случае является осевым положением тяговой планетарной коробки передач 110 в суммирующем узле 412 для получения значения контрольной ошибки 408. Предпочтительным является преобразование физических механизмов базового контроля 208 и обратной связи 404 таким образом, что два параметра имели одни и те же значения перед суммированием в узле 412 для получения арифметического постоянства. Усиление (K1) 406 может быть использовано для преобразования контрольной ошибки в угол поворота крепежной плиты β, такой как, например, угол поворота крепежной плиты 324, показанный, например, на фигуре 3. В некоторых примерах усиление 406 может быть представлено как наклонный отвес. Угол поворота крепежной плиты β может быть активизирован наклонным рычагом 302, как это представлено, например, на фигуре 3.
[0115] В этом примере алгоритм наклона 400 включает функцию 203, связанную с динамическим модулем наклона 202. Функция 203 осуществляет перевод угла наклона крепежной плиты β в угол наклона ζ. Алгоритм наклона 400 получает на входе угол наклона крепежной плиты β и возвращает степень изменения угла наклона γ'. В одном из примеров интегратор 410 может быть применен для получения результата от динамического модуля наклона 202 для установления угла наклона γ, который определяет соотношение скоростей БИСТ. Соотношение скоростей (СС) 420 может быть получено из γ посредством функции 418, имеющей на входе нормальное силовое усилие FN и скорость вращения тягового планетарного механизма 108. Угол наклона γ может быть трансформирован в обратную связь 404 путем использования коэффициента усиления (K4) 402. В некоторых примерах коэффициент усиления 402 равен планетарному радиусу, умноженному на РСФ (т.е. K4=R·РСФ). В одном из примеров алгоритм наклона 400 представлен функцией перехода, основанной на специфических функциональных условиях БИСТ. В некоторых случаях алгоритм наклона 400 может быть представлен в форме таблицы, которая может быть создана путем эмпирического определения γ' для придания угла β поворота крепежной плите и функциональным условиям БИСТ. Например, тесты могут быть выполнены на специфической БИСТ, в которой входное функциональное состояние удерживает дискретные скорости и нагрузки, необходимые для заданных условий, при этом угол β поворота крепежной плиты может быть использован в системе таким образом, что изменение соотношения скоростей БИСТ может быть учтено и использовано для вычисления результирующей γ'. Результирующие данные характеризуют динамическую реакцию - ответ системы, и могут быть представлены в виде наглядной таблицы или функции, используемой для алгоритма наклона 400.
[0116] На фигуре 5В представлена блок-схема базовой системы контроля угла наклона 207, которая может быть использована с приводом 25. Описание целей системы контроля угла наклона 207 будет сделано по аналогии с механическим примером, представленным на фигуре 6, однако в некоторых примерах система контроля угла наклона 207 может быть электрической или электромеханической, где элементы, показанные на фигуре 5В, являются функциями электронного устройства контроля. Система контроля угла наклона 207 включает узел базового контроля 208, соединенный с набором планетарных шестерен, имеющих соотношение скоростей (K1) 500. В некоторых примерах узел базового контроля 208 может быть отрегулирован путем использования вращательного момента, направленного к переходной гайке или базовой шкале. Узел базового контроля 208 использует вращательный момент 209, который может быть трансформирован в осевое перемещение базового элемента, такого как кулачковый механизм обратной связи 1066, имеющей наклонный отвес (K2) 502.
[0117] В одном из примеров система контроля угла наклона включает два узла суммирования 501 и 503. Первый узел суммирования формирует контрольную ошибку 408, основанную на базовом контроле 208 и двух источниках обратной связи. Первый источник обратной связи может быть представлен аксиальным положением тяговой планетарной коробки передач, а другой источник обратной связи может быть представлен аксиальным положением наклонного кулачкового механизма (см., например, фигуру 6).
Второй узел суммирования 503 суммирует усилия, воздействующие на наклонный кулачковый механизм 1068, что может быть использовано для определения аксиального положения наклонного кулачкового механизма 1068. Позиция χ наклонного кулачкового механизма 1068 может определяться разделением результирующего усилия узла суммирования 503 за счет массы наклонного кулачкового механизма 1068, показанной как усиление 508, и интегрированием результирующего ускорения χ'' наклонного кулачкового механизма 1068 с использованием интеграторов 410, как для определения скорости χ' наклонного кулачкового механизма 1068, так и вновь для определения позиции χ. Осевая позиция χ подается на вход узла суммирования 501, где она суммируется с сигналом базового контроля 208 и осевой позицией тяговой планетарной коробки передач для получения контрольной ошибки 408. Усилитель (K1) 406 может быть использован для преобразования контрольной ошибки 408 в угол поворота крепежной плиты β. Алгоритм наклона 400 определяет угол наклона планетарной плиты β как входной параметр и возвращает степень изменения угла наклона γ'. Интегратор 410 интегрирует сигнал производной γ', получая на выходе интегрирующего звена угол наклона γ, который может быть далее трансформирован в аксиальную позицию тяговой коробки передач путем усиления (K4) 402. При этом коэффициент усиления равен планетарному радиусу, умноженному на РСФ (т.е. K4=R·РСФ).
[0118] Вновь возвращаясь к фигуре 5В, далее рассмотрим узел суммирования 503. Как было отмечено ранее, узел суммирования 503 осуществляет суммирование силовых усилия, воздействующих, к примеру, на наклонный кулачковый механизм 1068. Усилия могут включать трение 510, нейтрализующее пружинное усилие 512, контрольное базовое усилие 514, усилие крепежной плиты 516 и аксиальные усилия 518, воздействующие на тяговую планетарную коробку передач 110, 1026, которые обычно осуществляются в зоне контакта 3 между тяговой планетарной коробкой передач 110, 1026 и тяговым планетарным механизмом 108, 1022, например. В представленном примере усилие трения, приложенное к наклонному кулачковому механизму 1068, может быть определено с учетом скорости перемещения наклонного кулачкового механизма 1068 и ходового винта наклонного кулачкового механизма 1068 с функцией 511. Нейтрализующее пружинное усилие 512 может быть определено путем использования коэффициента усиления (K5) 513 для контрольной ошибки 408, формируемой в узле суммирования 501. В некоторых примерах коэффициент усиления (K5) 513 может представлять собой механическую систему, которая используется для перемещения наклонного кулачкового механизма 1068, например, для нейтрализации положения с применением линейных, нелинейных и дискретных функций, таких как узел нейтрализации 1092, показанный на фигуре 6. Усилие может быть сгенерировано путем придания базового вращающего момента 209 в процессе регулировки базового контроля 208. В одном из примеров усилие базового контроля 514 определяется путем использования коэффициента усиления (K6) 515, пропорционального эффективности воздействия плеча рычага с вращающим моментом 209, воздействующим на наклонный кулачковый механизм 1068. В процессе функционирования, например, БИСТ 300 привод преобразования вращающего момента (τ) 521 находится под воздействием крепежных плит 304 и 306. В некоторых примерах крепежная плита 304 может быть сконфигурирована для взаимодействия с приводом преобразования вращающего момента (τ) 521 и придания угла наклона ζ, например, путем наклона рычага 302 или наклона кулачкового механизма 1068.
В одном примере крепежная плита с функцией вращающего момента 520 обеспечивает крепежной плите вращающий момент 522, создаваемый приводом преобразования вращающего момента (τ) 521, и наклон углу γ. Результирующее усилие крепежной плиты 516, воздействующее на наклонный кулачковый механизм 1068, определяется приданием вращающему моменту крепежной плиты 522 коэффициента усиления (K7) 517, которое пропорционально расстоянию от наклонного кулачкового механизма 1068, при этом вращающий момент крепежной плиты воздействует на наклонный кулачковый механизм 1068.
[0119] В некоторых примерах осевое усилие 518 тяговой планетарной коробки передач взаимодействует с наклонным кулачковым механизмом 1068. В одном из примеров осевое усилие 518 генерируется пружинно-индуцируемыми и наклонно-индуцируемыми боковыми усилиями в контактной зоне 3. Усилие 518 может быть определено алгоритмом усилия тяговой планетарной коробки передач 519, которое является функцией, среди прочего, нормального усилия в зоне контакта 3, и угловой скорости вращения ω тягового планетарного механизма 208, 308 или 1022. Названные усилия объединены в узле суммирования 503 и используются в системе контроля угла наклона 207 для обеспечения обратной связи с целью вычисления ошибки устойчивого состояния, которая может существовать в угле наклона ζ. Ошибка в определении угла наклона ζ устойчивого состояния может увеличиваться в процессе функционирования БИСТ 300 в результате воздействия пружинно-индуцированных силовых усилий на тяговую планетарную коробку передач.
В некоторых примерах предпочтительным для обеспечения оптимального состояния БИСТ является в общем случае функционирование с углом наклона ζ, равным нулю, когда изменение соотношения скоростей нежелательно. Пример системы контроля угла наклона, представленной на фигуре 6, включает принятие во внимание воздействие боковых усилий узла нейтрализатора 1092, который эффективно реагирует на боковые усилия, воздействующие на тяговую планетарную коробку передач 1026 таким образом, что угол наклона ζ является оптимальным функциональным условием наклона ζопт, что в некоторых случаях означает существенно нулевой угол наклона ζ в устойчивом состоянии при функционировании БИСТ.
[0120] Обращаясь к фигуре 5С, представим другой пример осуществления желаемой системы контроля угла наклона 2000. Как обсуждалось ранее, в процессе функционирования БИСТ 300 ошибка в определении угла наклона ζ в устойчивом состоянии может увеличиваться за счет осевых усилий, воздействующих на тяговую планетарную коробку передач. Таким образом, для поддержания устойчивого соотношения скоростей желательно отсоединить систему контроля угла наклона 2000 от позиции тяговой планетарной коробки передач. В одном из примеров тяговая планетарная коробка передач содержит блокиратор положения 530, который может быть соединен с тяговой планетарной коробкой передач и интегрирован в систему контроля угла наклона 2000. Блокиратор положения 530 тяговой планетарной коробки передач может быть для примера представлен механизмом, который блокирует и удерживает тяговую планетарную коробку передач в аксиальном положении до освобождения блокатора. Механизм может быть механическим блокирующим упором, или электромеханическим устройством, или электрогидравлическим устройством.
[0121] В одном из примеров состояние блокиратора положения тяговой планетарной коробки передач является результатом процесса принятия решения 532, в котором контрольная ошибка 408 имеет верхнюю и нижнюю границы допустимых значений. Если контрольная ошибка находится в интервале принятых ограничений в процессе принятия решения 522, положительный, или достоверный, результат процесса 522 направляют на блокиратор положения тяговой планетарной коробки передач, которая возвращает команду 531 на блокиратор тяговой планетарной коробки передач в ее текущем положении. Положительный, или достоверный, результат процесса принятия решения 532 также направляют в координатор угла наклона ζ 534, который возвращает команду 536 для установления соответствия угла наклона ζ оптимальному углу наклона ζопт, что в некоторых примерах означает равенство угла наклона нулю. Если контрольная ошибка 408 не находится в диапазоне заданных ограничений процесса принятия решения 532, отрицательный, или недостоверный, результат передается блокиратору положения тяговой планетарной коробки координат, который возвращает команду 531 для освобождения блокиратора положения тяговой планетарной коробки передач. Недостоверный результат подается на координатор угла наклона ζ 534, который возвращает команду 537б пропуска контрольной ошибки 408, например, для задействования алгоритма 400 с целью обеспечения изменения угла наклона γ. В этом примере контрольная ошибка 408 может быть определена путем сравнения значения базового контроля 208 и данных обратной связи 404. Значением базового контроля 408 может являться угловое или осевое положение, либо желаемым соотношением скоростей, либо другим относительным базовым значением в процессе функционирования БИСТ 300.
[0122] Примеры системы базового контроля угла наклона, представленные ранее, могут быть использованы в сочетании с системами, которые, среди прочего, являются регуляторами скорости или регуляторами вращающего момента. Ранее были представлены способы обеспечения желаемого сохранения постоянной скорости на входе при наличии различных значений скоростей на выходе или, напротив, механические, электрические гидравлические регуляторы скорости, которые могут быть соединены с переходной гайкой или базовым контролем для регулировки функционального состояния привода. В других случаях может быть желаемым сохранение величины постоянного вращающего момента на входе при наличии различных вращающих моментов на выходе, что в целом требует больших нововведений, чем традиционные системы контроля. Система контроля угла наклона, такая как представленная здесь система контроля 200, может быть соединена с механизмом контроля величины вращающего момента на входе при наличии различных вращающих моментов на выходе.
[0123] БИСТ 1000 адаптирована для использования базовой системы контроля угла наклона, обсуждавшейся выше, представлена на фигурах 6-23. В одном из примеров БИСТ 1000 включает корпус, выполненный в общем случае в виде защитной цилиндрической оболочки 1010 и торцевой крышки 1012; цилиндрическая оболочка 1010 и крышка 1012 могут быть жестко соединены, например, с помощью болтов, шурупов или резьбовыми соединениями. Элемент для подачи энергии на входе 1014, такой, например, как подающая звездочка, присоединен к входу привода 1018, установленному коаксиально продольной оси ПО1 БИСТ 1000. Генератор первого осевого усилия 1016 расположен между приводом на входе и первым тяговым кольцом 1020. Ряд тяговых планетарных механизмов 1022 расположен в плоскости, перпендикулярной продольной оси ПО1. Тяговые планетарные механизмы 1022 установлены под углом к продольной оси ПО1 в контакте трения или в тяговом контакте с первым тяговым кольцом 1020, вторым тяговым кольцом 1024 и тяговой планетарной коробкой передач 1026. Цилиндрическая оболочка 1010 адаптирована для принятия момента вращения от второго тягового кольца 1024. В одном из примеров элемент оболочки с вращающим моментом 1028 соединен со вторым тяговым кольцом 1024 через второй осевой силовой генератор 1030. Тяговое кольцо 1024, тяговая планетарная коробка передач 1026 и генераторы осевых усилий 1016, 1030 смонтированы коаксиально продольной оси ПО1. В некоторых примерах цилиндрическая оболочка 1010 и торцевая крышка 1012 поддерживаются радиально подшипниками 1032, 1034 соответственно. Подшипник 1032 обеспечивает вращающуюся поверхность раздела между цилиндрической оболочкой 1010 и осевой удерживающей плитой 1084. Подшипник 1034 обеспечивает вращение поверхности раздела между торцевой крышкой 1012 и входным приводом 1018. Упорный подшипник 1036 может быть установлен между входным приводом 1018 и торцевой крышкой 1012, при этом торцевая крышка 1012 взаимодействует с осевыми усилиями, генерируемыми БИСТ 1000 в процессе функционирования. Ведущий вал 1038 может частично поддерживать различные компоненты БИСТ 1000 и, в некоторых примерах, обеспечивать крепление БИСТ 1000 к раме автомобиля, поддерживающему кронштейну, фиксированному элементу машины и тому подобному.
[0124] БИСТ 1000 включает крепежные плиты 1040, 1042, адаптированные в том числе и для радиальной и аксиальной поддержки ряда планетарных опорных узлов 1044, которые будут далее представлены со ссылкой на фигуры 9 и 10. В некоторых примерах статорная распорная деталь (не показана) может быть обеспечена соединением крепежных плит 1040, 1042 вместе. Предпочтительно в некоторых случаях крепежные плиты 1040, 1042 соединять только полужестко (а не жестко), что делает возможным некоторое относительное вращение между крепежной плитой 1040 и крепежной плитой 1042. Как будет представлено ниже, в некоторых примерах, по меньшей мере, одна из крепежных плит 1040, 1042 может быть адаптирована для обеспечения регулировки соотношения скоростей БИСТ 1000.
[0125] На фигурах 9 и 10 представлен планетарно-опорный узел 1044, который в общем случае имеет тяговый планетарный механизм 1022, установленный коаксиально планетарной оси 1046. В некоторых примерах один или более подшипников могут быть расположены между планетарной осью 1046 и каналом тягового планетарного механизма 1022. Планетарная ось 1046 сконфигурирована для вытягивания тягового планетарного механизма 1022. Каждый конец планетарной оси 1046 установлен в опоре 1050. В некоторых случаях опора 1050 может быть охарактеризована как переводный рычаг, поскольку опора 1050 действует как рычаг для содействия наклону планетарной оси 1046, который в результате регулирует (или изменяет) соотношение скоростей между тяговыми кольцами 1020, 1024. В некоторых примерах опора 1050 адаптирована для получения и поддержки перемещения ролика кулачкового механизма 1052 и поворотного направляющего ролика 1054. Ролики перемещения кулачкового механизма 1052 адаптированы для передачи силового усилия от перемещающихся кулачковых механизмов 1056, 1058 (см. фигуру 6) к опорам 1050, в том числе и для обеспечения регулировки соотношения скоростей. В некоторых примерах поворотные направляющие ролики 1054 являются, в общем случае, адаптированными для взаимодействия с крепежными плитами 1040, 1042 для кооперации усилий, возрастающих в процессе регулировки соотношения скоростей. В одном из примеров каждая из планетарных осей 1046 снабжена наклонным роликом 1060 для обеспечения взаимодействия усилий, направленных на смещение (т.е. исключение их копланарности) продольной оси планетарного вала 1046 и продольной оси ПА1. Следует отметить, что планетарно-опорный узел 1044, представленный здесь, является лишь одним из примеров многообразия планетарно-опорных узлов, которые могут быть использованы в БИСТ 1000. Другие приемлемые планетарно-опорные узлы и/или опоры представлены в патентной заявке США No. 60/943, 273, которая была подана 11 июня 2007 и представлена здесь ссылкой.
[0126] В процессе функционирования, частично представленном на фигуре 6, поток энергии проходит через БИСТ 1000, в общем случае, следующим образом. Энергия подводится на вход элемента 1014. Привод на входе получает энергию от элемента 1014 и передает осевом силовому генератору 1016. Энергия передается от осевого силового генератора 1016 первому тяговому кольцу 1020, который, посредством трения или натяжения, приводит в движение тяговые планетарные механизмы 1022. Второе тяговое кольцо 1024 получает энергию от тяговых планетарных механизмов 1022 и передает эту энергию второму осевому генератору 1030. Энергия переходит от второго осевого генератора 1030 к цилиндрической оболочке 1010 за счет придания оболочке вращающего момента 1028. Далее энергия передается от оболочки 1010 к отвесу, концевому приводу, коробке шестерен, планетарному набору шестерен и т.д. Следует отметить, что представленный путь передачи энергии может быть описан противоположным образом, при котором энергия на входе через цилиндрическую оболочку 1010 передается от второго осевого силового генератора 1030 ко второму тяговому кольцу 1024 и т.д. и подается на вход энергетического элемента 1014 (в данном случае вход энергетического элемента 1014 будет более точно охарактеризовать как выход энергетического элемента). Следует также дополнительно отметить, что в некоторых случаях может быть предпочтительным обеспечение энергетическим переходным устройством на выходе (не показано), соединенным со вторым осевым силовым генератором 1030, который позволяет исключить оболочку 1010 из процесса передачи энергии и сохранять относительно постоянным направленный к компонентам поток энергии.
[0127] Регулировка соотношения скоростей между тяговыми кольцами 1020, 1024, результаты которой получают в модуляторе потока энергии через БИСТ 1000, может достигаться наклоном планетарных осей 1046 относительно продольной оси ПО1. В последующем обсуждении будут представлены механизмы и способы для осуществления и контроля угла наклона планетарных осей 1046.
[0128] Обращаясь к фигурам 6-8 и 13-23 более подробно, следует отметить, что сейчас в одном из примеров входная базовая гайка 1062 смонтирована коаксиально продольной оси ПО1 и связана посредством шлицевого соединения через скользящую шлицевую поверхность раздела 1064 с кулачковым механизмом обратной связи 1066. Шлицевое соединение сформировано с возможностью вращения базовой входящей гайки 1062 кулачкового механизма обратной связи 1066 и с возможностью для кулачкового механизма обратной связи 1066 осуществлять осевое перемещение к базовой входящей гайке 1062. Наклонный кулачковый механизм 1068 включает первый резьбовой участок 1070, приспособленный для соединения со спаренным резьбовым участком 1122 кулачкового механизма обратной связи 1066 (см. фигуры 15-18). Наклонный кулачковый механизм 1068 дополнительно имеет второй резьбовой участок 1072, сконфигурированный для соединения с соответствующим резьбовым участком 1074 крепежной плиты 1042. В одном из примеров ведущий вал 1038 снабжен шлицем 1076, который соединяется со шлицем 1082 наклонного кулачкового механизма 1068. Шлицевое соединение ведущего вала 1038 и наклонного кулачкового механизма 1068 обеспечивает отмену вращения, но позволяет осевое перемещение наклонному кулачковому механизму 1068 относительно ведущего вала 1038. В некоторых примерах базовая входящая гайка 1062, кулачковый механизм обратной связи 1066 и наклонный механизм обратной связи 1068 смонтированы концентрически по отношению к ведущему валу 1038.
[0129] Для регулировки соотношения скоростей БИСТ 1000 базовая входящая гайка 1062 повернута в выбранное положение, индицирующее желаемое соотношение скоростей. Если осевые усилия (или, иными словами, зажимающие отвес аксиальные силовые генераторы, которые вырабатывают нормальные силовые усилия в зоне контакта) на тяговые планетарные механизмы 1022 являются относительно низкими или близкими к нулю, через шлицевую поверхность раздела 1064 базовая входящая гайка 1062 обеспечивает вращение кулачкового механизма обратной связи 1066 вокруг продольной оси ПО1. Следовательно, когда нагрузка зажимного устройства на тяговые планетарные механизмы 1022 относительно низкая, наклонный кулачковый механизм не осуществляет перемещение. Соответственно, кулачковый механизм обратной связи 1066 вынужден осуществлять осевое перемещение, такое как вращение кулачкового механизма обратной связи вокруг оси ПО1. Осевое перемещение кулачкового механизма обратной связи 1066 приводит к осевому перемещению тяговой планетарной коробки передач 1026 через распорные подшипники 1078, 1080. Осевое перемещение тяговой планетарной коробки передач 1026 приводит к наклону планетарной оси 1046 посредством функционального соединения между тяговой планетарной коробкой передач и планетарными осями 1046 через переходные кулачковые механизмы 1056, 1058, переходные ролики кулачковых механизмов 1052 и опору 1050.
[0130] Когда нагрузки зажимного устройства на тяговые планетарные механизмы 1022 близки, например, к средним функциональным условиям, вращение входящей базовой гайки 1062 приводит к вращению кулачкового механизма обратной связи 1066, однако в этих функциональных условиях сопротивление, обеспечиваемое планетарно-опорными узлами 1044 и переходными кулачковыми механизмами 1056, 1058, направлено на сдерживание осевого перемещения кулачкового механизма обратной связи 1066. Поскольку кулачковый механизм обратной связи 1066 вращается, но не перемещается поступательно, наклонный кулачковый механизм 1068 (который постоянно вращается посредством скользящего шлицевого участка 1082) вынужден перемещаться аксиально с помощью резьбового соединения поверхности раздела 1070, 1122 между кулачковым механизмом обратной связи 1066 и наклонным кулачковым механизмом 1068. Поскольку крепежная плита 1042 сдерживается аксиально, но может иметь, по меньшей мере, некоторое угловое вращение, крепежная плита 1042 форсирует угловое вращение вокруг продольной оси ПО1 посредством скользящего шлицевого соединения поверхностей раздела 1072, 1074 между наклонным кулачковым механизмом 1068 и крепежной плитой 1042, что в результате приводит к тому, что крепежная плита 1042 переводит планетарную ось 1046 в наклонное положение. В одном из примеров крепежная плита 1042 вращается под углом до достижения максимального угла наклона. Условия наклона, как объяснено выше, приводят к наклону планетарных осей 1046. Наклон планетарных осей 1046 приводит к регулировке соотношения скоростей БИСТ 1000. Однако наклон планетарной оси 1046 дополнительно воздействует на аксиальное перемещение переходных кулачковых механизмов 1056, 1058 посредством функционального соединения между планетарными осями 1046 и переходными кулачковыми механизмами 1056, 1058. Осевое перемещение переходных кулачковых механизмов 1056, 1058 приводит, как следствие, к осевому перемещению кулачкового механизма обратной связи через упорные подшипники 1078, 1080. Поскольку входящая опорная гайка 1062 предупреждает вращение кулачкового механизма обратной связи 1066, наклонный кулачковый механизм 1068 и кулачковый механизм обратной связи 1066 осуществляют аксиальное перемещение вместе. Аксиальное перемещение наклонного кулачкового механизма 1068 приводит к восстановлению углового вращения крепежной плиты, которая, как следствие, возвращается к углу наклона, который генерирует значительные наклонные усилия для установки наклонного кулачкового механизма 1068 в равновесном осевом положении.
[0131] Когда БИСТ 1000 находится в функциональных условиях без нагрузки и под нагрузкой, может существовать переход от одних функциональных условий к другим, который индуцирует наклонное положение состояния планетарной оси 1046 (т.е. восстановительное действие для условий нулевого наклона), при этом данный переход включает перевод и вращение кулачкового механизма обратной связи 1066 с одновременным переводом наклонного кулачкового механизма 1068. Во всех случаях кулачковый механизм обратной связи 1066 и наклонный кулачковый механизм 1068 сконфигурированы для взаимодействия с целью индуцирования угловых условий планетарных осей 1046 путем углового вращения крепежной плиты 1042. Наклонные условия приводят к наклону планетарных осей 1046 по отношению к набору БИСТ 1000 с желаемым соотношением скоростей. Кулачковый механизм обратной связи 1066, под воздействием со стороны планетарно-опорных узлов 1044, взаимодействует с наклонным кулачковым механизмом 1068 для восстановления крепежной плиты 1042 в положении, которое индицирует номинальный нулевой наклон.
[0132] Обращаясь сейчас подробнее к фигурам 11 и 12, отмечаем, что в одном примере крепежная плита удерживается аксиально размещенной осевой удерживающей плитой 1084 и осевой удерживающей крышкой 1086, которые взаимодействуют с упорными подшипниками 1088, 1090, как показано на виде узла Б БИСТ, показанной на фигурах 6 и 12. Осевая удерживающая плита 1084, осевая удерживающая крышка 1086 и упорные подшипники 1088, 1090 установлены коаксиально продольной оси ПО1 и сконфигурированы для поддержки осевого стопора крепежной плиты 1042 у продольной оси ПО1. Осевая удерживающая плита 1084 предпочтительно жестко соединена с ведущим валом 1038; т.е. удерживающая плита 1084 сконфигурирована в некоторых примерах для аксиального, радиального и вращательного (относительно продольной оси ПО1) стопорения. В одном из примеров крепежная плита 1040 удерживается аксиально, радиально и вращательно относительно продольной оси ПО1, что может достигаться жестким соединением крепежной плиты 1040 с ведущим валом 1038. В некоторых примерах поверхность раздела между крепежной плитой 1040 и входным приводом 1018 обеспечивается поверхностью роликовых подшипников, или подшипников, для обеспечения относительного вращения между крепежной плитой и входным приводом 1018 с минимальным трением.
[0133] По природе шарового планетарного привода, такого как БИСТ 1000, тяговая планетарная коробка передач 1026 является объектом осевых силовых усилий (которые также могут быть определены как "вращательно-индуцированные боковые усилия") путем контактов между тяговыми планетарными механизмами 1022 и тяговой планетарной коробкой передач 1026 в процессе функционирования БИСТ 1000. Когда такие осевые усилия не противодействуют друг другу, становится возможным использование тяговой планетарной коробки передач 1026 для индуцирования осевого перемещения наклонного кулачкового механизма 1068, в результате которого происходит функционирование в условиях с углом наклона, не равным нулю. В представленных примерах БИСТ 1000 вращательно-индуцированные боковые усилия, направленные на тяговую планетарную коробку передач 1026, сбалансированы, по меньшей мере, наклонно-индуцированными боковыми усилиями; следовательно, наклонный кулачковый механизм 1068 удерживается в состоянии равновесия. Однако такая конфигурация приводит к устойчивому состоянию отличного от нуля угла наклона, которое может быть менее эффективно, чем состояние с нулевым углом наклона. Для достижения состояния с нулевым углом наклона вращательно-индуцированные боковые усилия предпочтительно сбалансированы усилиями, отличными от наклонно-индуцированных боковых усилий.
[0134] В одном из примеров БИСТ 1000 может быть оснащен узлом нейтрализатора боковых усилий 1092, который в целом представлен видом узла А, представленного на фигурах 6 и 11. В некоторых примерах нейтрализатор 1092 содержит первый элемент сопротивления 1094 (такой как одна и более катушечные спирали, волновые спирали и т.д.), расположенный между осевой удерживающей плитой 1084 и переводной манжетой сопротивления 1096. Первый элемент сопротивления 1094 и переводная манжета сопротивления 1096 смонтированы смежно по отношению к друг другу и коаксиально продольной оси ПО1. Реакционный фланец нейтрализатора 1098 может быть соединен с наклонным кулачковым механизмом 1068, установлен смежно с переводной манжетой сопротивления 1096. Второй элемент сопротивления 1100 установлен между реакционным фланцем нейтрализатора 1098 и упорной насадкой нейтрализатора 1102, которая может быть жестко прикреплена к манжете сопротивления 1096; все указанные элементы смонтированы коаксиально продольной оси ПО1. Предпочтительно упорная крышка нейтрализатора 1102 аксиально стопорится, например, крепежной плитой 1042.
[0135] В процессе функционирования боковое усилие направлено на обеспечение осевого перемещения тяговой планетарной коробки передач 1026, тенденции аксиальному перемещению кулачкового механизма обратной связи 1066 и наклонного кулачкового механизма 1068 препятствует сопротивление со стороны элементов сопротивления 1094, 1100. Если осевое перемещение наклонного кулачкового механизма 1068 направлено влево (на основе функционирования БИСТ 1000, показанной на фигуре 6), реактивный фланец нейтрализатора 1098, соединенный с наклонным кулачковым механизмом 1068, толкает переводную манжету сопротивления 1096. Первый элемент сопротивления 1094, поддерживаемый аксиально удерживающей плитой 1084, обеспечивает уравновешивающее усилие на реактивный фланец нейтрализатора 1098 через переводную манжету сопротивления 1096. Следовательно, первый элемент сопротивления 1094 сконфигурирован для уравновешивающего перемещения наклонного кулачкового механизма в первом направлении по отношению к крепежной плите 1042. Аналогично, наклонный кулачковый механизм 1068 приводится в движение во втором направлении по отношению к крепежной плите 1040, при этом второй элемент сопротивления 1100 поддерживается аксиально упорной насадкой нейтрализатора 1102 и обеспечивает уравновешивающие усилия, направленные для сопротивления аксиальному перемещению наклонного кулачкового механизма 1068 во втором направлении. Следует отметить, что переводная манжета сопротивления 1096 сконфигурирована для обеспечения разделения действий элементов сопротивления 1094, 1100. Противодействие элементов сопротивления 1094, 1100 осуществляется соответствующим образом для обеспечения перемещения наклонного кулачкового механизма 1068 в желаемом функциональном состоянии БИСТ 1000, когда необходима регулировка соотношения скоростей. Следовательно, предпочтительно противодействие элементов сопротивления 1094, 1100 осуществляется в общем случае для обеспечения только достаточного минимума сопротивления, необходимого для нейтрализации боковых усилий, воздействующих на тяговую планетарную коробку передач 1026. В некоторых примерах элементы сопротивления 1094, 1100 могут иметь различные сопротивления и отличаться функциональным состоянием БИСТ 1000. При этом оптимальное сопротивление обеспечивают наклонному кулачковому механизму 1068 для нейтрализации усилий, воздействующих на наклонный кулачковый механизм 1068.
[0136] Обращаясь к фигурам 13 и 14, отмечаем, что в одном примере ведущий вал 1038 включает в общем случае удлиненный цилиндрический корпус 1104. Главная ось корпуса 1104 может быть снабжена скользящим шлицевым соединением 1076, которое предпочтительно сформировано для соединения с соответствующим скользящим шлицевым участком 1082 наклонного кулачкового механизма 1068. В некоторых примерах корпус ведущего вала 1104 может иметь посадочное место для подшипника 1106, для установки одного или более радиальных подшипников ведущего вала 1108, что обеспечивает коаксиальное размещение ведущего вала 1038 и наклонного кулачкового механизма 1068 с минимальным трением скольжения. В одном из примеров ведущий вал 1038 снабжен посадочным местом для подшипника 1110 для установки одного или более подшипников кулачкового механизма обратной связи 1112 для обеспечения коаксиального размещения ведущего вала 1038 и кулачкового механизма обратной связи 1066 с минимальным трением скольжения. В некоторых случаях подшипники 1108, 1112 являются осевыми роликовыми подшипниками или могут быть заменены скользящей разделяющей поверхностью между ведущим валом 1038 и соответственно наклонным кулачковым механизмом 1068 и кулачковым механизмом обратной связи 1066. В одном из примеров ведущий вал 1038 может быть снабжен фланцем 1114, что, помимо прочего, обеспечивает вспомогательную поверхность 1115 для формирования входящей базовой гайки 1062. Фланец ведущего вала 1114 может иметь плечо 1116, обеспечивающее осевое стопорение входной базовой гайки 1062.
[0137] На фигурах 15 и 16 показан пример выполнения кулачкового механизма обратной связи 1066, имеющего в общем случае удлиненный цилиндрический полый корпус 1118. Канал 1120 кулачкового механизма обратной связи выполнен для установки кулачкового механизма обратной связи 1066 коаксиально ведущему валу 1038. В одном из примеров канал 1120 может иметь резьбовой участок 1122 для соединения с соответствующим резьбовым участком 1070 наклонного кулачкового механизма 1068. Один участок кулачкового механизма обратной связи 1066 предпочтительно снабжен скользящим шлицем 1064 для крепления входящей базовой гайки 1062. В одном из примеров кулачковый механизм обратной связи может быть снабжен одной или более обоймами 1126, 1128 для формирования упорных подшипников 1078, 1080 (см. фигуру 6).
[0138] На фигурах 17 и 18 приведен один из примеров выполнения наклонного кулачкового механизма 1068, имеющего в общем случае удлиненный полый цилиндрический корпус 1130. Наклонный кулачковый механизм 1068 может иметь резьбу 1070, выполненную для соединения с резьбой 1122 кулачкового механизма обратной связи 1066. Наклонный кулачковый механизм 1068 может быть оснащен дополнительно второй резьбой 1072 для соединения с резьбой 1074 крепежной плиты 1042. В одном примере отвес первого резьбового участка 1070 относительно меньше, чем отвес второго резьбового участка 1072; например, отвес первого резьбового участка 1070 может быть в диапазоне 10-30 мм, а отвес второго резьбового участка 1072 может быть в диапазоне 100-300 мм. В одном случае отвес первого и второго резьбовых участков 1070, 1072 составляет соответственно 20 мм и 200 мм (или, иными словами, их соотношение равно 1:10). В некоторых примерах реакционный фланец нейтрализатора 1098 может быть установлен раздельно и соответственно сконфигурирован для соединения с наклонным кулачковым механизмом 1068. Канал 1132 наклонного кулачкового механизма может быть адаптирован для установки наклонного кулачкового механизма у главной оси 1038. В одном примере канал 1132 снабжен скользящим шлицем 1082, выполненным для соединения с соответствующим скользящим шлицем 1076 ведущего вала 1038. В некоторых примерах наклонный кулачковый механизм 1068 может быть оснащен шлицем 1133, выполненным на внешней поверхности корпуса 1130, установленным аксиально для соединения со скользящим шлицем 1144, выполненным на переходном кулачковом механизме 1056 для стопорения вращения переходного кулачкового механизма 1056 вокруг продольной оси ПО1.
[0139] На фигурах 19 и 20 показан один из примеров выполнения крепежной плиты 1042, являющейся в общем случае плитой или рамкой, установленной коаксиально ведущему валу 1038 для поддержания и управления наклонными роликами 1060 и/или регулятором перемещения направляющих роликов 1054. В одном примере выполнения крепежная плита 1042 имеет центральный канал с резьбой 1074 для соединения с резьбой 1072 наклонного кулачкового механизма 1068. Крепежная плита 1042 имеет в общем случае вогнутые поверхности 1134, выполненные для поддержания регулятора перехода направляющих роликов 1054, как это происходит в БИСТ 1000. Дополнительно крепежная плита 1042 снабжена пазами 1136, выполненными под углом к центральному каналу 1074 для обеспечения взаимодействия усилий, передаваемых через наклонные ролики 1060, как это происходит в БИСТ в процессе функционирования. Крепежная плита 1042 может быть снабжена внешним буртиком 1137 с обоймой 1138 на одной стороне и обоймой 1140 на другой стороне для взаимодействия с упорными подшипниками 1088 и 1090. Крепежная плита 1042 может также иметь реактивную поверхность 1142 для обеспечения осевого сдерживания удерживающей крышки нейтрализатора 1102 в одном из направлений.
[0140] На фигуре 21 показан один из примеров выполнения переходного кулачкового механизма 1056, представляющего собой в общем виде цилиндрический корпус с профилированным внутренним каналом 1144, сконфигурированным для соединения со скользящим шлицем 1133 наклонного кулачкового механизма 1068. Переходной кулачковый механизм 1056 снабжен профилированной поверхностью 1146 для обеспечения регулировки роликов переходного кулачкового механизма 1052. Две обоймы подшипников 1148 и 1150 сформированы в переходном кулачковом механизме 1056 для взаимодействия соответственно с шариковым подшипником 1080 и шариковым подшипником, поддерживающими тяговую планетарную коробку передач 1026.
[0141] На фигурах 22 и 23 представлен опорный узел 1051, который может быть использован с некоторыми примерами выполнения БИСТ, оснащенной системой контроля угла наклона. Опорный узел 1051 может иметь опору 1053 с каналом на одном конце 1152 для размещения планетарной оси 1046, а на другом конце - паз 1154 для размещения ролика переходного кулачкового механизма 1052. Канал 1156 в общем случае выполнен перпендикулярно пазу 1154 для фиксации оси (не показано) с целью обеспечения безопасности ролика переходного кулачкового механизма 1052. Ось переходного направляющего ролика 1158 может быть размещена в канале 1160 и в промежуточных каналах 1162 и 1164. Промежуточные каналы 1162, 1164 обеспечивают требуемое соединение между переходными направляющими роликами 1159, наклонными реакционными роликами 1161 и крепежными плитами 1040, 1042 в процессе изменения соотношения скоростей, определяемого условиями угла наклона. Каналы 1160, 1162 и 1164 должным образом сформированы для обеспечения шарнирного или бесшарнирного взаимодействия оси наклонных направляющих роликов 1158. Наклонные реактивные ролики 1161 и/или переходные направляющие ролики 1159 предпочтительно оснащены коронками, выпуклая поверхность сформирована для образования поверхности раздела с крепежными плитами 1040, 1042 таким образом, чтобы обеспечить контакт между наклонными реакционными роликами 1161 и/или переходными направляющими роликами и крепежными плитами 1040, 1042 в процессе изменения соотношения скоростей БИСТ в условиях наклона.
[0142] На фигурах 24-29 представлен альтернативный пример выполнения БИСТ 1002. Прежде чем приступить к описанию БИСТ 1002, будет полезным вернуться к описанию БИСТ 1000. В некоторых примерах осуществления БИСТ 1000 держатель 1040 жестко соединен с ведущим валом 1038, возможно, для того, чтобы входная базовая гайка 1062 могла поворачиваться только вокруг продольной оси ПО1 по дуге, меньшей чем 360 градусов. В некоторых случаях такая конструкция может быть нежелательной. В одном из примеров БИСТ 1002 сконструирована с возможностью вращения входного базового кольца 1166 вокруг продольной оси ПО1 с углами, превышающими 360 градусов. Такое функционирование обеспечивает большие зону и разрешающую способность процесса контроля соотношения скоростей.
[0143] БИСТ 1002 в основном схожа с БИСТ 1000, кроме следующих аспектов, которые будут пояснены ниже. Для эффективной регулировки соотношения скоростей базовое входящее кольцо 1166 соединено с кулачковым механизмом обратной связи 1168. Лучше всего это представлено на фигурах 24 и 25, в примере осуществления трансмиссии, в котором базовое входное кольцо 1166 и кулачковый механизм обратной связи 1168 соединены. Вращение базового входного кольца 1166 приводит к вращению кулачкового механизма обратной связи 1168. Взаимодействие между кулачковым механизмом обратной связи 1168 и наклонным кулачковым механизмом 1068 приводит к образованию угла наклона крепежной плиты 1042, что аналогично тому, что было раскрыто при описании БИСТ 1000.
[0144] Для вращения базового входного кольца 1166 планетарные переходные шестерни 1170 оснащены центральной шестерней, которая является частью планетарного базового входа 1174. Центральная шестерня 1172 соединена с набором планетарных шестерен 1176, которые, в свою очередь, связаны с базовым входным кольцом 1166 в планетарной конфигурации шестерен. Планетарное крепление 1178 планетарного базового входа 1174 жестко соединено с основанием; следовательно, планетарное крепление 1178 удерживается аксиально и вращательно относительно продольной оси ПО1. В одном из примеров крепежная плита 1040 жестко соединена с планетарным креплением 1178 посредством планетарных осей 1180, которые также служат для поддержания планетарных шестерен 1176. В некоторых случаях крепежная плита 1040 может быть соединена с планетарным креплением 1178 посредством, например, прессовой посадки или посадки скольжения. В некоторых примерах ведущий вал 1182 может быть адаптирован для жесткого соединения с планетарным креплением 1178 посредством планетарных осей 1180. Следовательно, планетарное крепление 1178, крепежная плита 1040 и ведущий вал 1182 существенно удерживаются аксиально и предотвращают вращение вокруг продольной оси ПО1. В примере, показанном на фигуре 24, крепежная плита 1040 жестко соединена с крепежной удерживающей манжетой 1184, являющейся элементом крепежной плиты 1040, которая, в свою очередь, жестко соединена с планетарным креплением 1178. Один или более подшипников крепежной манжеты 1186 могут быть использованы для обеспечения вращающейся поверхности раздела между крепежной удерживающей манжетой 1184 и входным приводом 1188.
[0145] На фигуре 27 показан один из примеров выполнения ведущего вала 1182, который может быть адаптирован к спаренному фланцу 1190, имеющему по его периферии ряд спаренных шлицов 1192, которые выполнены для соединения с соответствующими периферическими шлицами 1194 (см. фигуру 25) планетарного крепления 1178. В некоторых примерах соединение ведущего вала 1182 с планетарным креплением 1178 осуществляется посредством спаренных шлицов 1192 и 1194 и обеспечивает их неподвижное положение относительно друг друга. В некоторых случаях ведущий вал 1182 и планетарное крепление 1178 соединены с удлинениями (подобно шлицам 1192, 1194) в пространстве между планетарными шестернями 1176. В такой конфигурации планетарные шестерни 1176 могут быть установлены между отверстиями смежных спаренных удлинений.
[0146] На фигурах 28 и 29 представлен кулачковый механизм обратной связи 1168, имеющий центральный канал 1196 с резьбой, адаптированный для монтирования кулачкового механизма обратной связи 1168 у ведущего вала 1182 и обеспечения резьбового соединения 1070 наклонного кулачкового механизма 1068. Кулачковый механизм обратной связи 1168 может включать обоймы подшипников 1126, 1128. В одном из примеров кулачковый механизм обратной связи 1168 снабжен зубчатым участком 1198 для установки планетарных шестерен 1176. Зубчатый участок 1198 предпочтительно сформирован в некоторых примерах для обеспечения осевого перемещения кулачкового механизма обратной связи 1168 относительно планетарных шестерен 1176 при одновременном соединении кулачкового механизма обратной связи с планетарными шестернями 1176.
[0147] Представленная на фигурах 30-35 БИСТ 1004 может быть сконфигурирована аналогично БИСТ 1000 и БИСТ 1002; однако в некоторых примерах БИСТ 1004 имеет переходной кулачковый механизм 1200, выполненный для оснащения одним или более стопорящих вращение стержней 1204. Для предотвращения вращения наклонного кулачкового механизма 1200, 1202 вокруг продольной оси ПО1 стопорящие вращение стержни 1204 присоединены к крепежным плитам 1040, 1042, которые сконструированы так, чтобы фиксировать неподвижно относительно продольной оси ПО1. Крепежная плита 1042 в некоторых примерах может быть выполнена с возможностью некоторого углового вращения вокруг продольной оси ПО1 для обеспечения наклона планетарной оси 1046; однако такая конфигурация приводит к небольшому, функционально безотносительному, угловому вращению, предотвращающему вращение стержней 1204 вокруг продольной оси ПО1. Стопорящие вращение стержни 1204 предпочтительно имеют осевую степень свободы относительно крепежной плиты 1204. Следовательно, в некоторых примерах стопорящие вращение стержни 1204 вставляют в наклонные кулачковые механизмы 1200 и крепежную плиту 1042 с радиальными и/или осевыми зазорами для обеспечения относительного осевого перемещения между крепежной плитой 1042 и стопорящими вращение стержнями 1204.
[0148] БИСТ 1004 включает кулачковый механизм обратной связи 1206, который соединен с планетарными шестернями 1176 и функционально соединен с наклонным кулачковым механизмом 1208 и с переходным кулачковым механизмом 1200. В одном примере кулачковый механизм обратной связи 1206 и переходной кулачковый механизм 1200 связаны резьбовым соединением. В некоторых примерах кулачковый механизм обратной связи 1206 сконфигурирован для присоединения к наклонному кулачковому механизму 1208 посредством резьбы 1210 и ползунка наклонного кулачкового механизма 1212. Внешняя обойма подшипника 1210 может быть подвергнута прессовой посадке, например, во внутренний канал кулачкового механизма обратной связи 1206. Зажим, установленный во внутреннем канале кулачкового механизма обратной связи 1206, взаимодействует с плечом ползунка наклонного кулачкового механизма 1212 для аксиального удерживания подшипника 1210. В некоторых примерах плечо (не показано) может быть установлено на кулачковом механизме обратной связи 1206 для аксиального захвата внешней обоймы подшипника 1210 между зажимом и плечом. Ползунок наклонного кулачкового механизма 1212 смонтирован на ведущем валу 1214 посредством скользящего шлицевого соединения. Наклонный кулачковый механизм 1208 аксиально удерживается на ползунке 1212 путем, например, использования зажима и подшипника 1210. В некоторых примерах наклонный кулачковый механизм 1208 может быть оснащен плечом, которое контактирует с внутренней обоймой подшипника 1210.
[0149] В процессе регулировки соотношения скоростей БИСТ 1004 ограничение вращения кулачкового механизма обратной связи 1206 обеспечивает перемещение переходных кулачковых механизмов 1200, 1202, но не приводит к какому-либо движению ползунка наклонного кулачкового механизма 1212 или соответственно наклонного кулачкового механизма 1208. Однако перемещение кулачкового механизма обратной связи 1206 обеспечивает аксиальное движение ползунка наклонного кулачкового механизма 1212 и за счет этого наклонного кулачкового механизма 1208 через подшипник 1210. Перемещение наклонного кулачкового механизма 1208 приводит к угловому вращению крепежной плиты 1042 вокруг продольной оси ПО1.
[0150] На фигурах 33 и 34 подробно в одном примере показан кулачковый механизм обратной связи 1206, имеющий цилиндрический полый корпус 1196, оснащенный фланцем 1216, адаптированным к внутреннему каналу, имеющему зубчатый участок 1213, сформированный для соединения с планетарными шестернями 1176. Фланец 1216 кулачкового механизма обратной связи имеет резьбу 1218 для соединения с соответствующей резьбой 1220 переходного кулачкового механизма 1200. В некоторых примерах кулачковый механизм обратной связи 1206 имеет торцевое отверстие 215 для осевого сдерживания внешней обоймы подшипника 1210.
[0151] На фигуре 35 в качестве примера показан переходной кулачковый механизм 1200, имеющий цилиндрический корпус с резьбой во внутреннем канале 1220, адаптированном для соединения с резьбой 1218 кулачкового механизма обратной связи 1206. Переходной кулачковый механизм 1200 оснащен профилирующей поверхностью 1222 для регулирования переходных роликов кулачкового механизма 1052. В одном из примеров профилированная поверхность 1222 адаптирована для взаимодействия с поверхностью опоры планетарно-опорного узла. Обойма подшипника 1224 может быть сформирована в переходном кулачковом механизме 1200 для обеспечения поддержания подшипниками тяговой планетарной коробки передач 1026. В одном примере переходной кулачковый механизм 1200 снабжен плечом 1223 для формирования переходного кулачкового механизма 1202. В некоторых примерах один или более каналов 1226 расположены аксиально вокруг центрального канала 1220 для размещения и поддержки стопорящих вращение стержней 1204.
[0152] БИСТ 1006 на фигуре 36 включает первую крепежную плиту 1302 и вторую крепежную плиту 1304, каждая из которых существенно схожа с крепежными плитами 1040, 1042. Крепежная плита 1302 может быть сконфигурирована для обеспечения использования упорного подшипника 1306, связывающего крепежную плиту 1302 и входной привод 1308. В одном примере крепежная плита 1302 жестко связана с планетарным креплением 1308, которое выполнено для поддержания набора планетарных шестерен 1312, функционально соединенных с центральной шестерней 1314 и кулачковым механизмом обратной связи 1316. Крепежная плита 1302, планетарное крепление 1310, кулачковый механизм обратной связи 1316 и центральная шестерня 1314 предпочтительно установлены коаксиально продольной оси ПО1. Ведущий вал 1318 установлен радиально по отношению к планетарному креплению 1310 и функционально соединен с центральной шестерней 1314.
[0153] Ведущий вал 1320 соединен с планетарным креплением 1310, причем планетарное крепление 1310 может быть достаточно схожим с планетарным креплением 1178, показанным на фигурах 25 и 26. В некоторых примерах главная ось может быть оснащена разделительной поверхностью 1322 для поддержания кулачкового механизма обратной связи 1316. В одном примере разделительная поверхность 1322 является скользящей разделительной поверхностью подшипника, но в других примерах разделительная поверхность 1322 может быть установлена с подвижной посадкой между главной осью 1320 и кулачковым механизмом обратной связи 1316. Как иллюстрируется фигурой 36, в одном из примеров ведущий вал 1320 и планетарное крепление 1310 могут быть сконфигурированы для обеспечения осевого стопорения центральной шестерни. Следовательно, ведущий вал 1320 и/или крепление 1310 могут быть оснащены плечами или углублениями 1315А и 1315Б соответственно для содействия поддержанию осевого положения центральной шестерни 1314.
[0154] В одном примере ведущий вал 1320 соединен с наклонным кулачковым механизмом 1324, например, посредством скользящего шлицевого соединения 1326. Следовательно, ведущий вал 1320 и наклонный кулачковый механизм 1324 могут быть оснащены скользящим шлицевым соединением. Наклонный кулачковый механизм 1324 соединен с кулачковым механизмом обратной связи 1316, например, посредством резьбы 1328. Таким образом, в некоторых примерах наклонный кулачковый механизм 1324 и кулачковый механизм обратной связи 1316 имеют резьбовые участки. В некоторых примерах наклонный кулачковый механизм 1324 соединен с переходным кулачковым механизмом антиротационного удерживателя 1330 через антиротационное соединение 1332, которое может представлять собой, например, скользящий шлиц. Переходный кулачковый механизм антиротационного удерживателя 1330 может быть прикреплен или интегрирован с переходным кулачковым механизмом 1334, который существенно сходен с переходным кулачковым механизмом, показанным, например, на фигуре 6. Переходные кулачковые механизмы 1334 и 1336 соединены функционально с кулачковым механизмом обратной связи 1316 и тяговой планетарной коробкой передач 1338 через первый 1340 и второй 1342 упорные подшипники. Наклонный кулачковый механизм 1324 предпочтительно соединен с крепежной плитой 1304 через поверхность раздела 1346 с резьбовым соединением, в этом случае наклонный кулачковый механизм 1324 или крепежная плита 1304 могут быть снабжены резьбой сильных отвесов.
[0155] В одном примере ведущий вал 1320 может быть зафиксирован на основании с помощью планетарного крепления 1310 и стопора крепежной плиты 1344. Следовательно, ведущий вал 1320, планетарное крепление 1310 и стопор крепежной плиты 1344 зафиксированы аксиально, вращательно или радиально по отношению к продольной оси ПО1. Как следствие, наклонный кулачковый механизм 1324, антиротационный удерживатель 1330 и переходные кулачковые механизмы 1334, 1336 сконфигурированы для исключения вращения вокруг продольной оси ПО1. В некоторых примерах антиротационный удерживатель 1330 оснащен удлинителем (показан, но не обозначен), адаптированным для соединения встык с крепежной плитой 1304, и, таким образом, обеспечивает ограниченную остановку при переходе БИСТ 1006. В одном примере стопор крепежной плиты 1344 соединен с ведущим валом 1320 посредством резьбы 1348. Стопор крепежной плиты 1344 может быть адаптирован для установки стопорящего болта крепления 1350, который сконфигурирован для взаимодействия со стопором крепежной плиты 1344 для аксиального стопорения крепежной плиты 1304. В некоторых примерах крепежная плита 1304 может быть снабжена крепежным пазом 1352, что позволяет крепежной плите 1304 осуществлять угловое вращение вокруг продольной оси ПО1 в плоскости, перпендикулярной указанной оси. Безусловно, предпочтительно обеспечение поверхностями раздела между крепежной плитой 1304, стопором крепежной плиты 1344 и стопорящим болтом крепления 1350 для минимизации трения, что позволяет крепежной плите 1304 вращаться вокруг стопора крепежной плиты 1344 и стопорящего болта крепления 1350. В одном примере крепежная плита 1304 и/или стопор крепежной плиты 1344 оснащены, например, плечами и/или углублениями для обеспечения радиального поддержания крепежной плиты 1304.
[0156] Для регулирования соотношения скоростей БИСТ 1006 вращение планетарного переходного механизма 1318 приводит к вращению кулачкового механизма обратной связи через центральную шестерню 1314 и планетарные шестерни 1312. Как было указано ранее со ссылкой на фигуры 6 и 24, вращение кулачкового механизма обратной связи 1316 приводит к его перемещению, при этом наклонный кулачковый механизм не перемещается, или приводит к перемещению как кулачкового механизма обратной связи 1316, так и наклонного кулачкового механизма 1324, при этом переходные кулачковые механизмы 1334, 1336 и тяговая планетарная коробка передач 1338 находятся под натягом. Через разделительную поверхность 1346, перемещение наклонного кулачкового механизма 1324 приводит к угловому вращению крепежной плиты 1304 и, как следствие, перевод БИСТ 1006 в наклонное положение или, напротив, возвращение крепежной плиты 1304 в положении с другим или близким к нулю наклоном. Как объяснено выше, придание наклонного положения может привести к регулировке соотношения скоростей БИСТ.
[0157] В одном примере БИСТ 1006 может быть оснащена механизмом нейтрализации боковых усилий. В примере, представленном на фигуре 36, нейтрализатор бокового усилия может включать первый элемент сопротивления 1354, смонтированный коаксиально по отношению к продольной оси ПО1. Первый элемент сопротивления 1354 может быть выполнен, например, в виде одной или более пружин. В некоторых примерах первый элемент сопротивления 1354 может быть установлен у продольной оси ПО1, но не обязательно концентрично с продольной осью ПО1. Первое реакционное кольцо 1356 установлено встык с первым элементом сопротивления 1354 и смонтировано коаксиально продольной оси ПО1. Зажим или прокладка 1358 сформированы для обеспечения первого реакционного кольца 1356 осевым стопором. Следовательно, первое реакционное кольцо 1356 движется аксиально против первого элемента сопротивления 1354, при этом первое реакционное кольцо 1356 не может двигаться аксиально относительно прокладки 1358. В одном примере прокладка 1358 является выровненным аксиально и радиально стопором крепежной плиты 1344 и ведущего вала 1320. Как показано, в некоторых примерах первый элемент сопротивления 1354, первое реакционное кольцо 1356 и прокладка 1358 посажены в гнездо, по меньшей мере частично, ведущим валом 1320 и/или удерживателем крепежной плиты 1344.
[0158] Ведущий вал 1320 может иметь штифтовое крепление 1360, которое, в свою очередь, может быть использовано для штифтового крепления наклонного кулачкового механизма 1362. Штифтовое крепление 1360 первым концом соединено с первым реакционным кольцом 1356 и вторым концом соединено со вторым реакционным концом 1364. Штифтовое крепление 1360 имеет поперечный канал, сформированный для размещения штифта наклонного кулачкового механизма 1362, например, путем прессования. Штифт крепления 1360 выполнен для соединения с главной осью 1320 путем скользящей посадки. Ведущий вал 1320 может иметь шлиц для обеспечения присоединения штифта наклонного кулачкового механизма 1362 к наклонному кулачковому механизму 1324. Штифт наклонного кулачкового механизма 1362 может обеспечивать аксиальное перемещение наклонного кулачкового механизма 1324. Как показано на фигуре 36, ведущий вал 1320 может быть оснащен удерживающим фиксатором 1366, сформированным для предотвращения осевого перемещения второго реактивного кольца 1364 в одном направлении. Присоединенный встык ко второму реакционному кольцу в непосредственном контакте с ним и установленный коаксиально (в некоторых примерах) продольной оси ПО1 второй элемент сопротивления 1368 может быть выполнен в виде одной или более пружин. В одном примере прокладка 1370 может быть расположена между вторым элементом сопротивления 1368 и установленным с предварительным натягом регулятором 1372. Прокладка 1370 первоначально обеспечивает соединение между вторым элементом сопротивления 1368 и установленным с предварительным натягом регулятором 1372. В некоторых примерах установленный с предварительным натягом регулятор 1372 может представлять собой, например, набор винтов. Штифтовое крепление 1360, второе реакционное кольцо 1364, второй элемент сопротивления 1368, прокладка 1370 и установленный с предварительным натягом регулятор 1372 смонтированы коаксиально продольной оси ПО1 с возможностью аксиального перемещения; однако аксиальное перемещение первого и второго реакционных колец 1356, 1364 ограничено соответственно компенсационным стержнем 1358 и удерживающим фиксатором 1366.
[0159] Первый элемент сопротивления 1354, второй элемент сопротивления 1368, прокладка 1370 и набор винтов 1372 предпочтительно выбраны для обеспечения предварительного натяжения и/или получения желаемых характеристик сопротивления с целью определения тенденции боковых усилий, воздействующих на наклонный кулачковый механизм 1324, и создания наклонного положения. В процессе функционирования осевое перемещение наклонного кулачкового механизма 1324 будет удерживаться первым и вторым элементами сопротивления 1354, 1368. Когда наклонный кулачковый механизм 1324 осуществляет перемещение влево (относительно ориентирования на странице), он воздействует на штифт наклонного кулачкового механизма 1362. Это действие перемещает штифтовое крепление 1369 аксиально в соединении с первым реакционным кольцом 1356. Первый элемент сопротивления 1354 оказывает сопротивление перемещению первого реакционного кольца 1356. Наклонный кулачковый механизм 1324 осуществляет перемещение вправо тем же образом, при этом он функционально соединен со вторым реакционным кольцом 1368, которое испытывает сопротивление со стороны второго элемента сопротивления 1368. Следует отметить, что эти действия со стороны первого и второго элементов сопротивления 1354, 1368 приводят к их разъединению (т.е. обеспечению независимости друг от друга) через осевые стопоры, что обеспечивается компенсационным стержнем 1358 и удерживающим фиксатором 1366.
[0160] Для восстановления некоторых изложенных выше обстоятельств в одном примере ведущий вал 1320 наделен, по меньшей мере, некоторыми из следующих аспектов. Центральный канал адаптирован для установки штифтового крепления 1360. Он также может иметь удерживающий фиксатор 1366 и снабжен резьбой для установки регулятора с предварительным натягом 1372. Ведущий вал 1320 предпочтительно снабжен пазом 1361, выполненным для размещения штифта наклонного кулачкового механизма 1362 внутри ведущего вала к внешнему его участку. На внешней поверхности ведущего вала 1320 может быть выполнена первая резьба 1348 для жесткого крепления к элементу основания, такому как удерживатель крепежной плиты 1344. На внешней поверхности ведущего вала также может быть выполнен скользящий шлицевый участок для обеспечения соединения со скользящим шлицем наклонного кулачкового механизма 1324. Наклонный кулачковый механизм 1324 может быть выполнен в виде трубчатого корпуса, имеющего внутренний и внешний диаметры. Внутренний диаметр наклонного кулачкового механизма 1324 может иметь углубление (показанное, но не обозначенное) для обеспечения штифтового соединения наклонного кулачкового механизма 1362. На внутренней поверхности трубчатого корпуса наклонного кулачкового механизма 1324 может быть выполнен шлицевой участок для размещения соответствующих шлицов основного вала 1320. Участок на внешней поверхности трубчатого корпуса наклонного кулачкового механизма 1324 может быть оснащен сильным отвесом резьбового участка для резьбового соединения с крепежной плитой 1304. Наклонный кулачковый механизм 1324 может включать резьбовой участок с относительно слабым отвесом при сравнении с механизмом обратной связи 1316. В некоторых примерах трубчатый корпус наклонного кулачкового механизма 1324 может иметь шлицевой участок на внешней поверхности трубчатого корпуса для соединения с соответствующим скользящим шлицем антиротационного удерживателя 1330.
[0161] Представленная на фигурах 37 и 38 БИСТ 1008 схожа с БИСТ 1006 во многих аспектах. Однако БИСТ 1008 снабжена альтернативным нейтрализатором боковых усилий. Те компоненты БИСТ 1008, которые существенно схожи с компонентами БИСТ 1006, не будут обсуждаться подробно. БИСТ 1008 имеет первую крепежную плиту 1302, которая жестко соединена с планетарным креплением 1310. Входной привод 1308 может поддерживаться и взаимодействовать с первой крепежной плитой 1302 посредством подшипника 1306. Планетарная входная база 1410 может быть соединена с кулачковым механизмом обратной связи 1316. Планетарная база 1410 аналогична рассмотренной выше со ссылками, например, на фигуры 24 и 36. Наклонный кулачковый механизм 1325 соединен, как ранее обсуждалось со ссылкой на фигуру 36, с кулачковым механизмом обратной связи 1316, антиротационным удерживателем 1330 и крепежной плитой 1304. Наклонный кулачковый механизм 1325 может также соединяться с ведущим валом 1404 аналогично наклонному механизму 1324, показанному на фигуре 36, соединенному с ведущим валом 1320.
[0162] БИСТ 1008, представленная на фигуре 38, может быть снабжена нейтрализатором боковых усилий, который включает первый элемент сопротивления 1355, установленный коаксиально продольной оси ПО1 и ведущему валу 1404. Фланец 1402 ведущего вала 1404 жестко соединен с фланцем удлинителя 1406, который жестко скреплен с плечом фиксатора 1408. Переводная манжета 1412 монтируется коаксиально с ведущим валом 1404 и установлена радиально по отношению к фланцу удлинителя 1406. В одном примере переводная манжета 1412 контактирует с фланцем 1402 и оснащена подвижной посадкой относительно фланца удлинителя 1406. В некоторых примерах переводная манжета 1414 может быть жестко соединена с переводной манжетой 1412, в результате чего образуется удерживающее пространство для первого элемента сопротивления 1355. Наклонный кулачковый механизм 1325 может быть оснащен захватом 1416, адаптированным для соединения с переводной манжетой 1412. В некоторых примерах первый элемент сопротивления 1355 расположен между захватом 1416 и переводной манжетой 1414 или фланцем 1402. Второй элемент сопротивления 1369 может быть установлен коаксиально ведущему валу 1404 и может быть расположен между переводной манжетой 1412 и плечом фиксатора 1408.
[0163] В процессе функционирования осевое перемещение наклонного кулачкового механизма 1325 по направлению к крепежной плите 1302 сопровождается сопротивлением со стороны первого элемента сопротивления 1355, взаимодействующего с переводной манжетой 1414 и/или фланцем 1402. Следует напомнить, что ведущий вал 1404 может быть зафиксирован на основании; следовательно, основной вал 1404 может быть сконфигурирован не для аксиального перемещения. Наклонный кулачковый механизм 1325 осуществляет аксиальное перемещение по направлению к крепежной плите 1304, второй элемент сопротивления 1369 предназначен для сопротивления аксиальному движению кулачкового механизма 1324А, поскольку второй элемент сопротивления 1369 поддерживается плечом фиксатора 1408, которое жестко соединено с ведущим валом 1404 через фланец удлинения 1406. Элементы сопротивления 1355, 1369 предпочтительно выбираются для обеспечения получения желаемых характеристик в условиях преодоления результатов воздействия боковых усилий на наклонный кулачковый механизм 1325. Следует отметить, что в некоторых примерах поверхность раздела между кулачковым механизмом обратной связи 1316 и фланцем удлинителя 1406, как и поверхность раздела между переводной манжетой 1412 и фланцем удлинителя 1406, сформирована должным образом для минимизации трения скольжения.
[0164] БИСТ 1009, показанная на фигурах 39 и 40, существенно схожа в различных аспектах с БИСТ 1006 и 1008. В одном из примеров наклонный кулачковый механизм 1502 жестко соединен с дополнительной муфтой 1504 нейтрализатора 1506, который в общем виде представлен узлом Е. В некоторых примерах нейтрализатор 1506 включает локатор элемента сопротивления 1508, который адаптирован для определения положения первого и второго элементов сопротивления 1357, 1371. Локатор элемента сопротивления 1508 предпочтительно жестко соединен с ведущим валом 1510 и установлен коаксиально к нему. В одном из примеров первый элемент сопротивления 1357 установлен коаксиально ведущему валу 1510 и расположен аксиально между фланцем 1402 ведущего вала 1510 и первым кольцом сопротивления, или прокладкой, 1512. Первый элемент сопротивления 1357 и первое кольцо сопротивления 1512 расположены в углублении между ведущим валом 1510 и плечом фиксатора 1514 локатора элемента сопротивления 1508. Второй элемент сопротивления 1371 может быть установлен аксиально между удерживающей насадкой 1516 локатора элемента сопротивления 1508 и вторым кольцом сопротивления, или прокладкой, 1518. В некоторых примерах второй элемент сопротивления 1371 и второе кольцо сопротивления 1518 смонтированы коаксиально по отношению к ведущему валу 1510. Фланец захвата 1520 дополнительной муфты 1504 установлен между первым и вторым кольцами сопротивления 1512, 1518. Плечо фиксатора 1514 должным образом сконфигурировано для обеспечения осевой фиксации первого и второго колец сопротивления 1512, 1518, по меньшей мере, в одном осевом направлении. Плечо фиксатора 1514 удерживает аксиальное перемещение первого кольца сопротивления 1512 в первом направлении и второго кольца сопротивления 1518 во втором направлении.
[0165] В процессе функционирования наклонный кулачковый механизм 1502 перемещается в направлении крепежной плиты 1302, первый элемент сопротивления 1357 перемещает наклонный кулачковый механизм 1502 в противоположном направлении посредством функционального соединения между наклонным кулачковым механизмом 1502 и первым элементом сопротивления 1357 через первое кольцо сопротивления 1512, фланец захвата 1520 и дополнительную муфту 1504. Аналогично наклонный кулачковый механизм 1502 перемещается в направлении крепежной плиты 1304, второй элемент сопротивления 1371 перемещает наклонный кулачковый механизм 1502 в противоположном направлении посредством функционального соединения между наклонным кулачковым механизмом 1502 и вторым элементом сопротивления 1371 через второе кольцо сопротивления 1518, фланец захвата 1520 и дополнительную муфту 1504. Необходимо отметить, что фланец захвата 1520 воздействует на каждое из колец сопротивления 1512, 1518, а также первый и второй элементы сопротивления 1357, 1371 не за счет их соединения или активизации. Следовательно, действия первого и второго элементов сопротивления 1357, 1371 разделены. Предпочтительно первый и второй элементы сопротивления 1357, 1371 должным образом выбраны для обеспечения получения желаемых ответных характеристик для перемещения наклонного кулачкового механизма 1502 в положение, соответствующее условиям наклона БИСТ с номинально нулевым углом наклона.
[0166] Следует отметить, что нейтрализатор 1506 не нуждается в использовании всех компонентов, представленных выше. Например, в некоторых случаях первый элемент сопротивления 1357 и первое кольцо сопротивления 1512 могут быть представлены единым компонентом, осуществляющим желаемые функции сопротивления, например, таким как фланец захвата 1520. Как показано на фигуре 39, в некоторых примерах нейтрализатор 1506 может быть установлен на основании, по крайней мере, в канале кулачкового механизма обратной связи 1316.
[0167] БИСТ 4100, представленная на фигурах 41-45, может быть сконфигурирована в различных аспектах аналогично БИСТ 1000 и БИСТ 1002. В некоторых примерах БИСТ 4100 имеет узел базового контроля 4300, который будет раскрыт ниже. В одном примере контрольная базовая гайка 4302 расположена коаксиально к основному валу 4135 и соединена с промежуточным реакционным элементом 4304. Пружинные элементы 4306 и 4308 обеспечивают двунаправленное пружинное взаимодействие между контрольной базовой гайкой 4302 и промежуточным реакционным элементом 4304. Регулировка контрольной базовой гайки 4302 в одном направлении обеспечивает активизацию закручивания пружинного элемента 4306, а регулировка контрольной базовой гайки в другом направлении обеспечивает активизацию закручивания пружинного элемента 4308. Однажды активизированные, пружинные элементы 4306 и 4308 формируют силовое усилие, направленное на промежуточный реакционный элемент 4304, и, как следствие, направляют силовое воздействие на кулачковый механизм обратной связи 4102 до момента достижения в процессе регулировки нужного угла наклона. Некоторые функциональные условия БИСТ 4100 генерируют усилия, направленные на обеспечение сопротивления регулировки кулачкового механизма обратной связи, и, как следствие, эти усилия могут оказывать сопротивление регулировке контрольной базовой гайки 4302. Кулачковый механизм обратной связи 4102 подобен кулачковому механизму обратной связи 1206. В некоторых примерах предпочтительно минимизировать, или ограничивать, максимум усилий, необходимых для обеспечения регулировки контрольной базовой гайки 4302. В примере, показанном на фигуре 41, узел базового контроля 4300 обеспечивает регулировку контрольной базовой гайки 4302 даже при наличии высокого сопротивления, направленного на кулачковый механизм обратной связи.
[0168] В одном примере выполнения узла базового контроля 4300 пружинные элементы 4306 и 4308 являются закрученными пружинами с опорами 4322, 4324 и 4326, 4328 соответственно, при этом упомянутые опоры функционально соединены с контрольной базовой гайкой 4302 и промежуточным реакционным элементом 4304. Опора 4322 вращательно удерживается в одном направлении плечом 4320, выполненным на контрольной гайке 4302. Опора 4324 вращательно удерживается в двух направлениях каналом 4330, сформированным на промежуточном реакционном элементе 4304. Аналогично, опора 4328 удерживается плечом 4315 в одном направлении, а опора 4326 удерживается в двух направлениях каналом 4332 (см. фигуру 45), сформированным на промежуточном реакционном элементе 4304.
[0169] На фигуре 44 подробнее в одном примере показана контрольная базовая гайка 4302, выполненная в общем случае в виде цилиндрического корпуса с внешним кольцом 4312, адаптированным для соединения с регулируемой поверхностью раздела (не показана), такой как шкив или иной исполнительный механизм. Первое и второе углубления 4316 и 4318 выполнены на внутренней поверхности контрольной базовой гайки 4302 для размещения и удерживания в них, например, закрученной пружины 4308. Аналогично, первое и второе углубления 4317 и 4319 адаптированы для размещения и удерживания закрученной пружины 4306. В одном примере углубление 4318 выполнено на половине периметра внутренней поверхности первого конца контрольной базовой гайки 4302. Углубление 4318 обеспечивает удерживание опоры 4322 в одном направлении и зазор для опоры 4322 в противоположном направлении. Углубление 4317 выполнено на втором конце внутренней поверхности контрольной базовой гайки 4302. Углубления 4317 и 4318 обеспечивают опоры 4322 и 4328 степенью свободы, что, в свою очередь, обеспечивает активизацию одного пружинного элемента 4306, 4308, пока другой пружинный элемент 4306, 4308 может вращаться без активации.
[0170] На фигурах 42 и 45 в одном примере промежуточный реакционный элемент 4304 может быть в общем случае выполнен в виде цилиндрического корпуса, имеющего внутренний канал 4310, который сопряжен, например, с кулачковым механизмом обратной связи 4102. Первый и второй удерживающие каналы 4330 и 4332 могут быть выполнены на внешней поверхности промежуточного реакционного элемента 4304. Удерживающие каналы 4330, 4332 могут принимать опоры 4324 и 4326. Для аксиального удерживания пружинных элементов 4306 и 4308 соответственно первое и второе плечи 4334 и 4335 в некоторых примерах могут быть выполнены на внешней поверхности промежуточного реакционного элемента 4304.
[0171] В одном примере БИСТ 4100 может иметь узел нейтрализатора боковых усилий 4192, один из возможных вариантов выполнения которого показан на фигурах 41 и 47. В некоторых примерах нейтрализатор 4192 имеет первый элемент сопротивления 4194, установленный между аксиальной плитой сопротивления 4184 и переводной манжетой сопротивления 4196. Аксиальная плита сопротивления 4184 жестко соединена с основным валом 4135. Первый элемент сопротивления 4194 и переводная манжета сопротивления 4196 установлены встык друг с другом и коаксиально продольной оси ПО1. Реакционный фланец нейтрализатора 4198 может быть соединен с наклонным кулачковым механизмом 4168. Реакционный фланец нейтрализатора 4198 установлен встык с переводной манжетой сопротивления 4196. Второй элемент сопротивления 4195 установлен между реакционным фланцем нейтрализатора 4198 и фиксирующей насадкой нейтрализатора 4105, которая может быть жестко соединена с переводной манжетой сопротивления 4196. При этом все указанные выше элементы установлены коаксиально продольной оси ПО1. Фиксирующая крышка нейтрализатора 4105 удерживается аксиально, например, удерживающей плитой нейтрализатора 4103, которая предпочтительно жестко соединена с удерживающей плитой 4184, и обеспечена скользящей поверхностью раздела 4104.
[0172] БИСТ 4600, показанная на фигурах 48-50, в ряде аспектов существенно схожа с БИСТ 1000. БИСТ 4600 может быть снабжена узлом базового контроля 4602. В представленном примере узел базового контроля 4602 может иметь контрольную базовую гайку 4708, установленную коаксиально основному валу 4601, который соединен со шкивом 4702 канатами 4704 и 4706, при этом шкив 4702 соединен с пружинным удерживающим элементом 4710 у поверхности раздела 4711. В некоторых примерах поверхность раздела 4711 может быть образована скользящей посадкой, а в других примерах поверхность раздела может быть образована прессованной посадкой, обеспечивающей сочленение между шкивом 4702 и пружинным удерживающим элементом 4712 аналогично контрольной базовой гайке 4302, соединенной с промежуточным реакционным элементом 4304, представленном на фигурах 41-46. Один конец троса 4706 закреплен в канале 4808Б контрольной базовой гайки 4708, второй конец троса 4706 удерживается у канала 4806Б, выполненного в шкиве 4702; трос 4706 может быть соединен с каналами 4804Б, 4806Б необходимым образом, таким, как, например, посредством винтов или связующих (клейких) веществ. Аналогично, один конец троса 4704 закреплен в канале 4804А контрольной базовой гайки 4708, в то время, как другой конец троса 4704 закреплен в канале 4806А, выполненном в шкиве. Тросы 4704 и 4706 навиты вокруг шкива 4702 в спиральных желобах 4810А и 4810Б.
[0173] В одном примере БИСТ 5100, представленная на фигурах 51А-56, может быть сконфигурирована аналогично в различных аспектах с ранее представленным БИСТ; таким образом, только определенные отличия между прежде представленными примерами и БИСТ 5100 будут рассмотрены ниже. БИСТ 5100 может иметь первую крепежную плиту 5101 и вторую крепежную плиту 5102, которые могут быть соединены вместе крепежными стержнями 5103. Каждая из крепежных плит 5101, 5102 может иметь несколько радиально ориентированных шлицев 5104. В одном примере БИСТ 5100 имеет несколько тяговых планетарных механизмов 5106, установленных под углом к основному валу 5108. Основной вал 5108 в общем случае определяет продольную ось БИСТ 5100. Каждый из планетарных механизмов 5106 сформирован для вращения вокруг планетарной оси 5110. Планетарная поддерживающая крестовина выполнена для обеспечения опоры каждому концу планетарной оси 5110.
[0174] В одном примере планетарная поддерживающая крестовина 5112 представляет собой в общем виде U-образный корпус (фигура 56) с центральным каналом 5114, первой и второй опорами 5116А, 5116Б, выступающими из центрального канала 5114. Шлиц 5117 может быть расположен на U-образном корпусе симметрично относительно опор 5116А, 5116Б. Первая опора 5116А может быть оснащена эксцентричным наклонным кулачковым механизмом 5118А. Вторая опора 5116Б может быть оснащена эксцентричным наклонным механизмом 5118Б. Эксцентричные наклонные кулачковые механизмы 5118А и 5118Б адаптированы для соединения с радиальным шлицом 5104. Планетарная поддерживающая крестовина 5112 может быть оснащена каналами 5119, адаптированными для соединения с планетарной осью 5110 и ее поддержанием. В одном примере каналы 51190 имеют центральную ось 5190. Эксцентричные наклонные кулачковые механизмы 5118А и 5118Б могут быть снабжены центральными осями 51180А и 51880Б. Соответственно центральная ось 51190 и центральные оси 51180А, 51180Б могут быть сконфигурированы неконцентрично. В некоторых примерах эксцентричные наклонные кулачковые механизмы 51180А и 5118Б могут иметь изогнутые профили на периферических участках. В других примерах эксцентричные наклонные кулачковые механизмы 5118А, 5118Б могут иметь профили окружностей. В одном примере центральная ось 51180А располагается над центральной продольной осью БИСТ 5100, в то время как центральная ось 51180Б раполагается под центральной осью 51190 (см., например, фигуры 53А и 53B).
[0175] В одном из примеров БИСТ 5100 оснащена тяговой планетарной коробкой передач 5120, сконфигурированной для вращения вокруг ведущего вала 5108. Тяговая планетарная коробка передач 5120 установлена радиально и в контакте с каждым из тяговых планетарных механизмов 5106. В некоторых примерах тяговая планетарная коробка передач 5120 функционально соединена с первой и второй крепежными плитами 5101 и 5102 с помощью, например, подшипников, которые могут быть установлены аксиально за счет использования поддерживающих фланцев 5124 (см. фигуру 54), жестко связанных с крепежными плитами 5101 и 5102.
[0176] В одном примере БИСТ 5100, представленная на фигуре 52, может быть оснащена переходным стержнем 5126, смонтированным коаксиально ведущему валу 5108. В некоторых примерах переходный стержень 5126 за счет скользящей посадки соединен с ведущим валом 5108, в то время как в других примерах переходный стержень 5126 функционально соединен с ведущим валом 5108 посредством подшипников (не показано). Переходной стержень 5126 может иметь резьбовой участок 5128, который адаптирован для соединения с муфтой 5130. Муфта 5130 функционально соединена с планетарной поддерживающей крестовиной 5112 с помощью штифта 5132.
[0177] В одном примере, показанном на фигуре 55, муфта 5130 имеет резьбовой внутренний канал 5134, а по ее внешней поверхности равномерно относительно друг друга установлены реакционные плечи (выступы) 5136. Реактивные плечи могут быть сконфигурированы для установки в пазе 5117 каждой из планетарных поддерживающих крестовин 5112. В некоторых примерах каждое реакционное плечо 5136 может быть оснащено прорезью 5138, которая адаптирована для соединения со штифтом 5132.
[0178] В процессе функционирования БИСТ 5100 изменение соотношения скоростей БИСТ 5100 может быть достигнуто за счет изменения угла наклона планетарных валов 5110. Наклон планетарных валов 5110 может быть осуществлен за счет качения планетарных поддерживающих крестовин 5112. Планетарные поддерживающие крестовины 5112 могут осуществлять качение различными способами. Один из возможных способов качения планетарной поддерживающей крестовины 5112 включает вращение переходного стержня 5126 и, как следствие, аксиального перемещения муфты 5130 и штифта 5132. Второй способ качения планетарной поддерживающей крестовины 5112 включает вращение переходного стержня 5126 и, как следствие, вращение муфты 5130. Вращение муфты 5130 приводит к соединению реакционных плечей 5136 с планетарными поддерживающими крестовинами 5112. Реакционные плечи 5136, взаимодействуя с планетарными поддерживающими крестовинами, приводят их во вращение вокруг центральных осей наклонного кулачкового механизма 51180А и 51180Б, при этом наклонный кулачковый механизм приводит в движение центральную ось 51119. Движение центральной оси 51119, в свою очередь, приводит к наклону планетарного вала 5119. Угол наклона, как обсуждалось ранее, мотивирует изменение угла наклона планетарного вала 5110. В некоторых функциональных условиях, например в условиях сильных вращающих моментов, второй способ качения предпочтителен.
[0179] На фигурах 57-58 в одном примере регулятор вращающего момента 5700 может быть приспособлен к взаимодействию с элементами ранее представленных БИСТ, таких, например, как БИСТ 4100 или БИСТ 5100. Регулятор 5700 имеет соответствующие крепежные плиты 5702, которые могут быть существенно схожи с крепежными плитами, например, 1302, 4604 или 5102. Регулятор вращающего момента 5700 может иметь тяговую планетарную коробку передач 5704, которая существенно схожа с тяговой планетарной коробкой передач, например, 310. Регулятор вращающего момента 5700 может также иметь наклонный кулачковый механизм 5706, который существенно схож с наклонным кулачковым механизмом, например, 1200. В одном примере регулятор вращающего момента имеет первый и второй реактивные рычаги 5710 и 5712, оба из которых могут быть функционально соединены с крепежной плитой 5702 пружинами 5714. Регулятор вращающего момента 5700 может иметь предварительно загруженный регулятор 5716, соединенный с первым и вторым реактивными рычагами 5710 и 5712. В одном примере предварительно загруженный регулятор 5716 имеет резьбовые концы и может быть выполнен для функционирования как стяжная муфта или подобное устройство для установки реакционных рычагов 5710 и 5712. Реакционные рычаги 5710 и 5712 могут быть соединены аналогично ножницам.
[0180] В одном примере наклонный кулачковый механизм 5706 и крепежная плита 5702 могут быть адаптированы для соединении с тяговыми планетарными узлами 1044 (не показаны на фигурах 57-58), например, аналогично с представленными ранее БИСТ с базовыми системами контроля угла наклона. В одном примере выполнения наклонного кулачкового механизма 5706 последний имеет резьбовое удлинение 5707, которое выполнено для функционального соединения с центральным каналом крепежной плиты 5702. Пружина 5720 может быть функционально соединена с крепежной плитой и с наклонным кулачковым механизмом 5706. Резьбовое удлинение 5707 может соединяться с резьбовым каналом реакционного рычага 5710.
[0181] В процессе функционирования регулятор вращающего момента 5700 может регулировать соотношение скоростей трансмиссии для поддержания постоянного функционального вращающего момента. Осевое перемещение тяговой планетарной коробки передач приводит к вращению планетарную плиту 5702. Должно быть вполне очевидным, что пружина 5714 может быть активирована вторым реакционным рычагом 5712 в функциональных условиях, что приводит к тому, что осевое перемещение резьбового удлинения 5707 происходит в направлении, противоположном тому, что было представлено здесь в виде примера. Вращение крепежной плиты 5702 приводит к образованию угла наклона тяговых планетарных узлов 1044. Как обсуждалось ранее, образовавшийся угол наклона мотивирует перемещение трансмиссии 5700. При перемещении трансмиссии тяговая планетарная коробка передач 5704 перемещается аксиально, а крепежная плита 5702 поворачивается в равновесное состояние. Поскольку первый реакционный рычаг 5710 функционально соединен со вторым реакционным рычагом 5712 через пружины 5714, равновесные условия могут быть установлены регулятором 5716 для получения желаемого функционального вращающего момента.
[0182] Необходимо отметить, что в представленном выше описании приведены размеры для некоторых компонентов и узлов. Указанные размеры, или диапазон размеров, представлены для того, чтобы как можно лучше соответствовать некоторым юридическим требованиям, таким как лучший режим. Однако рамки представленных здесь вариантов изобретения в полной мере могут быть установлены только формулой изобретения, и, как следствие, ни один из упомянутых размеров не должен быть ограничен примерами осуществления изобретения, кроме тех случаев, когда кто-либо претендует на то, чтобы сделать конкретные размеры, или диапазон таковых, признаками изобретения.
[0183] Представленное описание детализирует некоторые примеры изобретения. Будет, однако, оценено то, что, как бы детализированным ни казалось представленное описание, существует множество путей использования изобретения. Кроме того, как отмечено выше, необходимо указать, что при использовании специфической терминологии при описании некоторых признаков или аспектов изобретения не следует понимать, что терминология здесь определяется заново таким образом, что она ограничена включением некоторых специфических характеристик признаков или аспектов изобретения, с которыми эта терминология ассоциируется.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2008 |
|
RU2499933C2 |
| ШАССИ СНЕГОБОЛОТОХОДА | 2015 |
|
RU2599852C1 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ (RVT) С ПОВЫШЕННОЙ УДЕЛЬНОЙ МОЩНОСТЬЮ | 2013 |
|
RU2654431C2 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| ВЕЛОСИПЕДНОЕ УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 1998 |
|
RU2223885C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ И МЕХАНИЗМ ПЕРЕДАЧИ КРУТЯЩЕГО МОМЕНТА | 2006 |
|
RU2390665C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2004 |
|
RU2267432C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2006 |
|
RU2399817C2 |
| Межосевой дифференциальный механизм распределения мощности | 2022 |
|
RU2785499C1 |
| Вально-планетарная гибридная трансмиссия | 2022 |
|
RU2805899C1 |
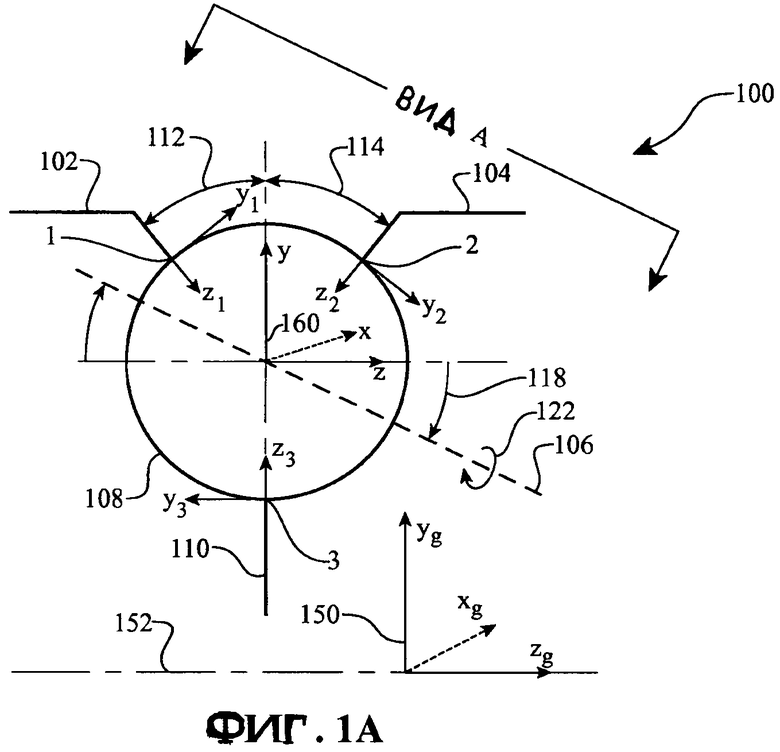
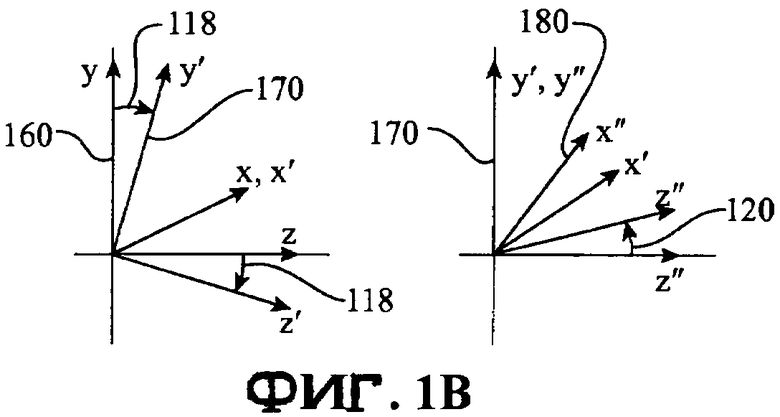
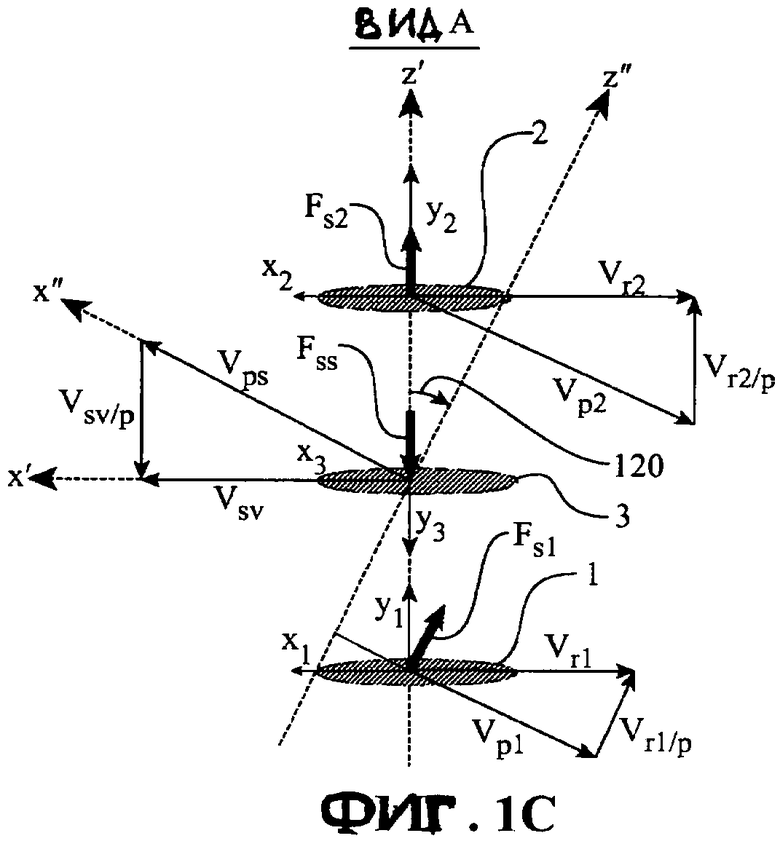
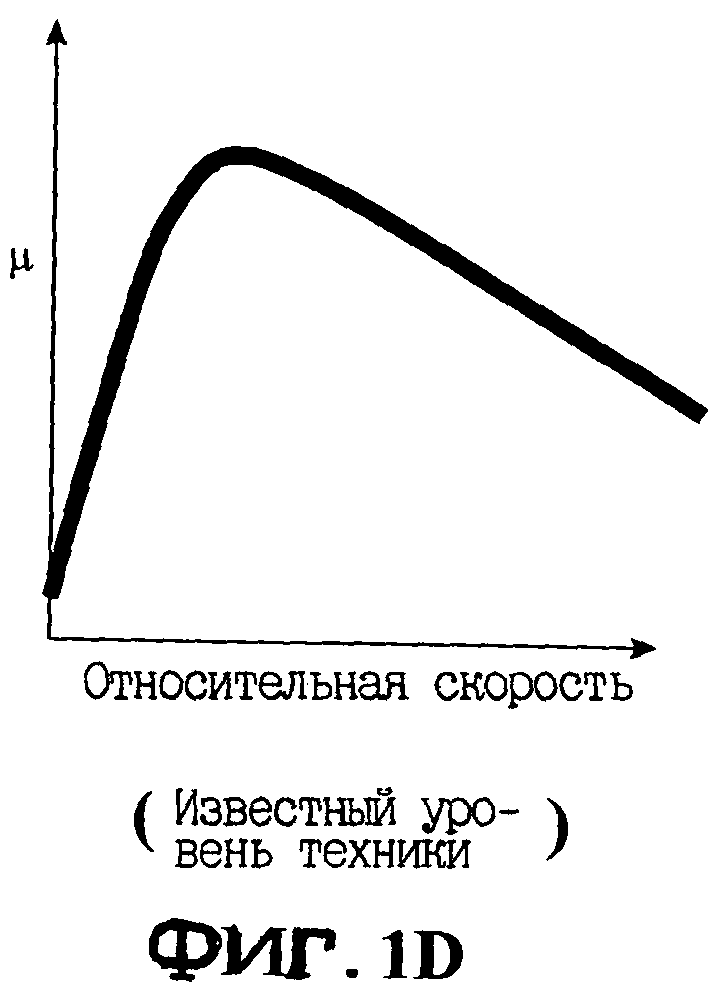
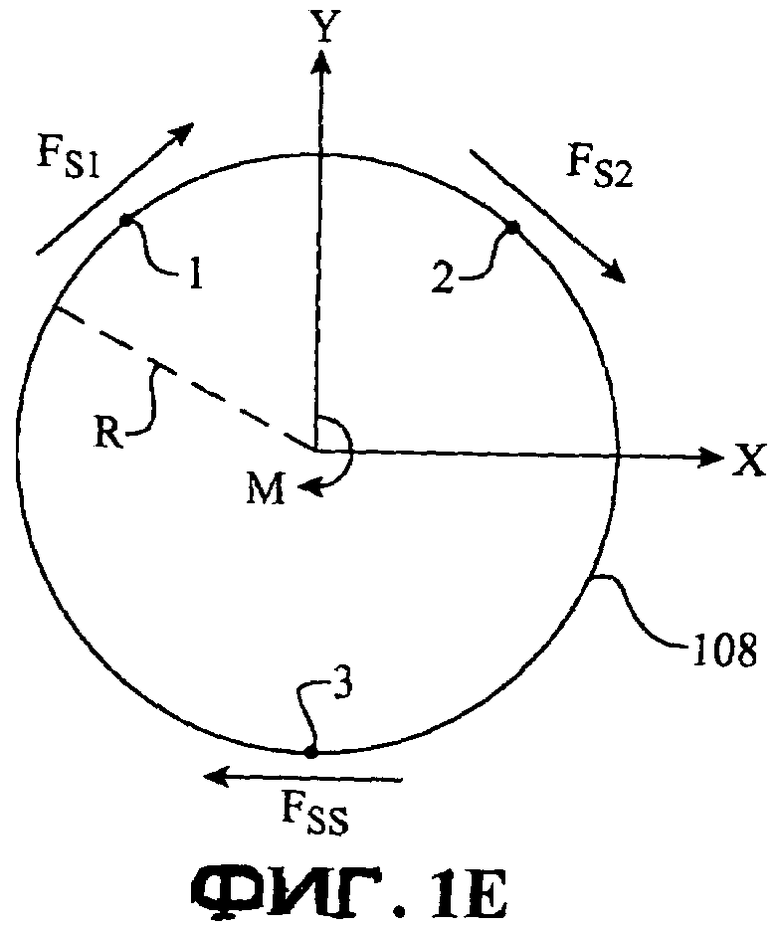
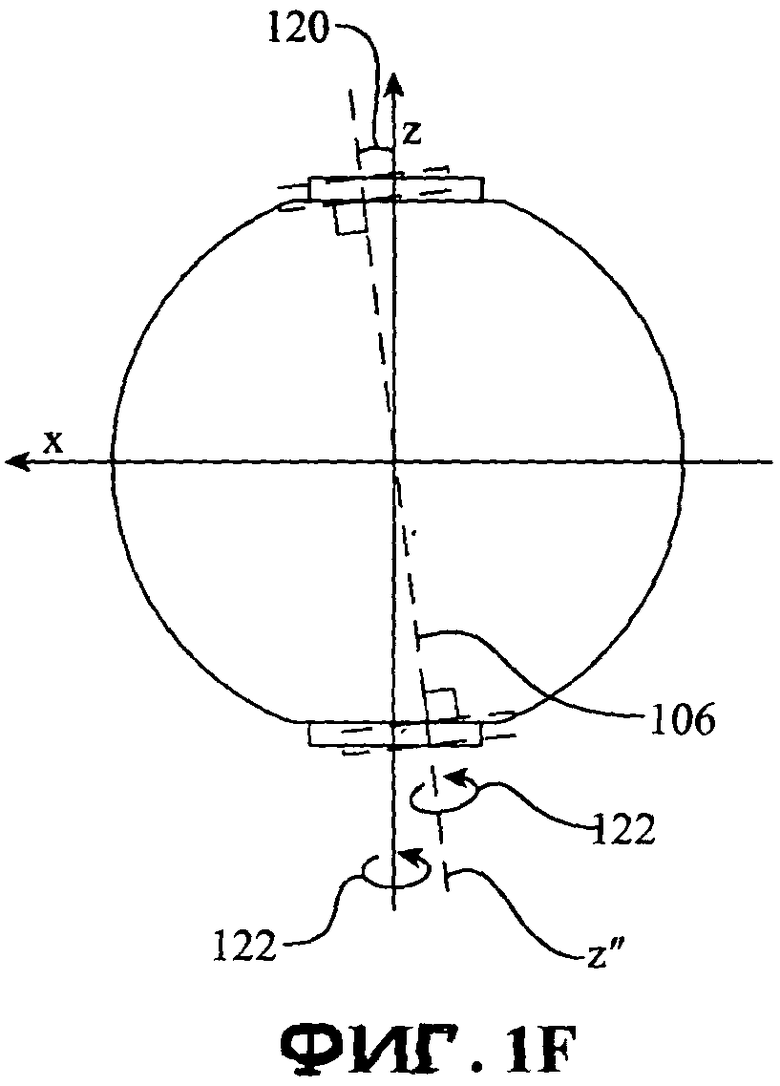
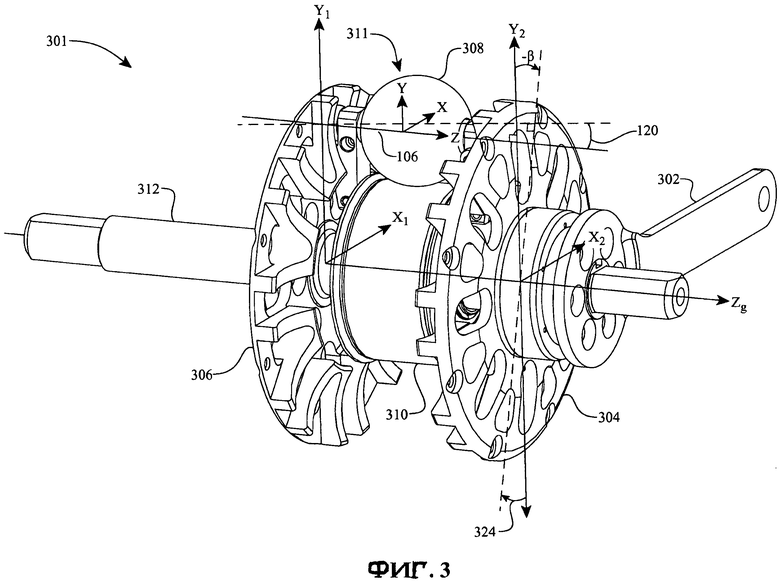
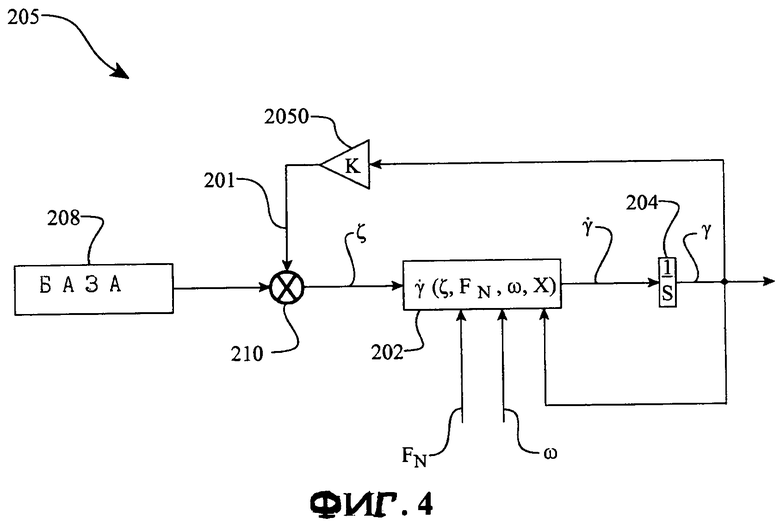
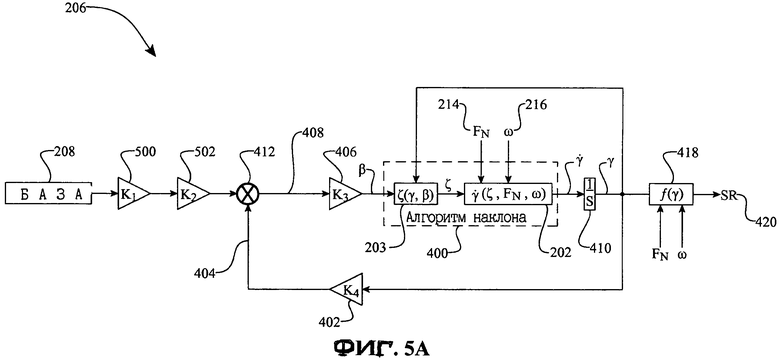
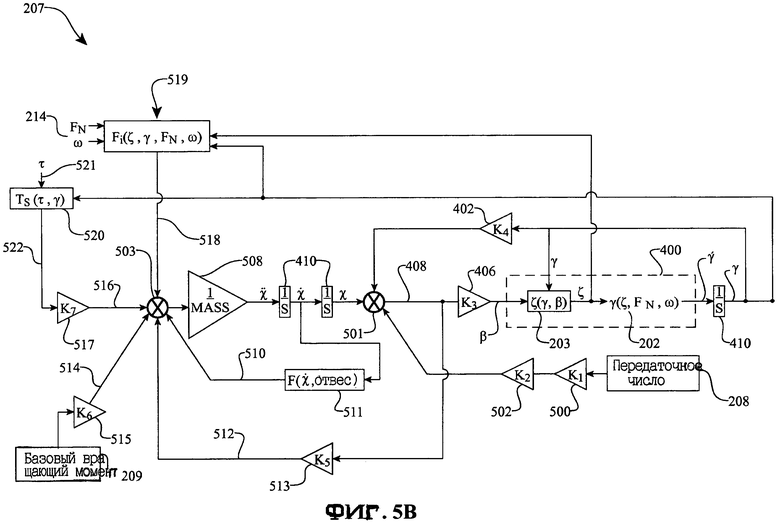
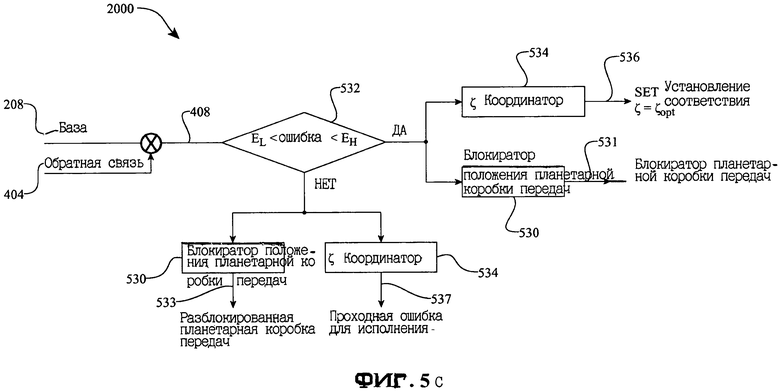
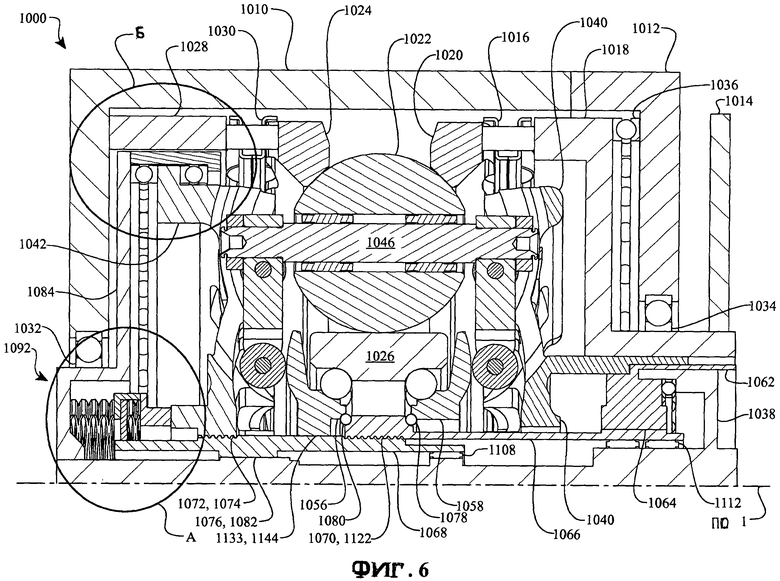
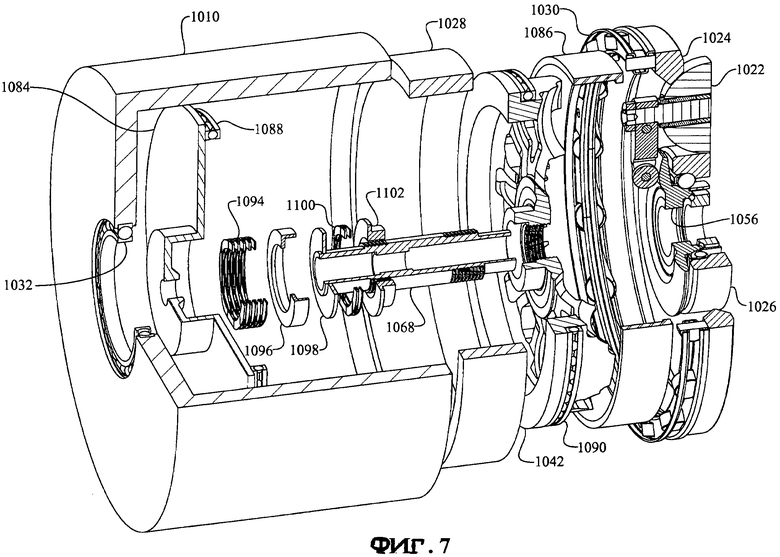
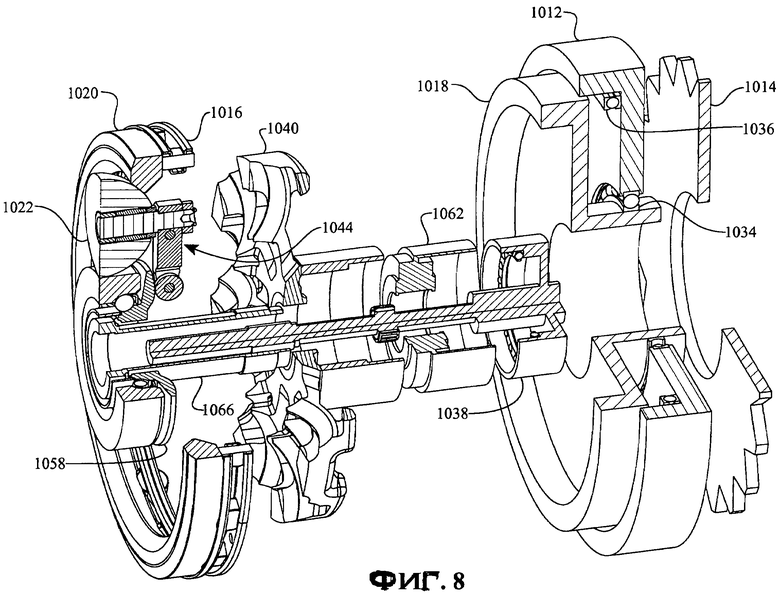
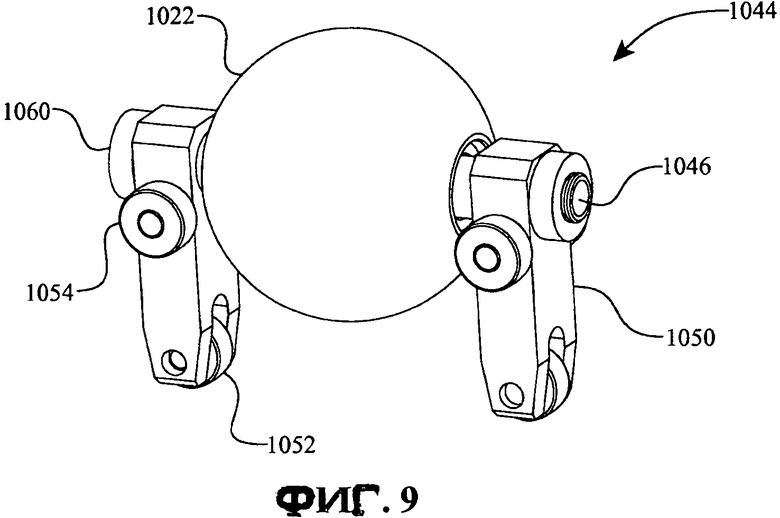
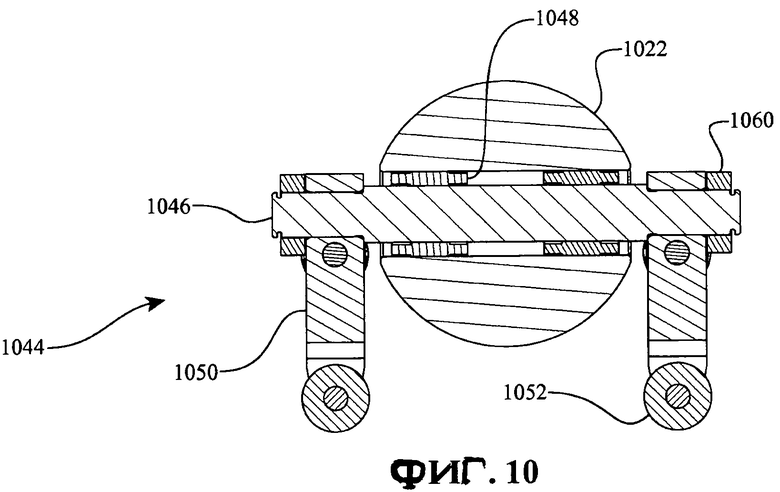
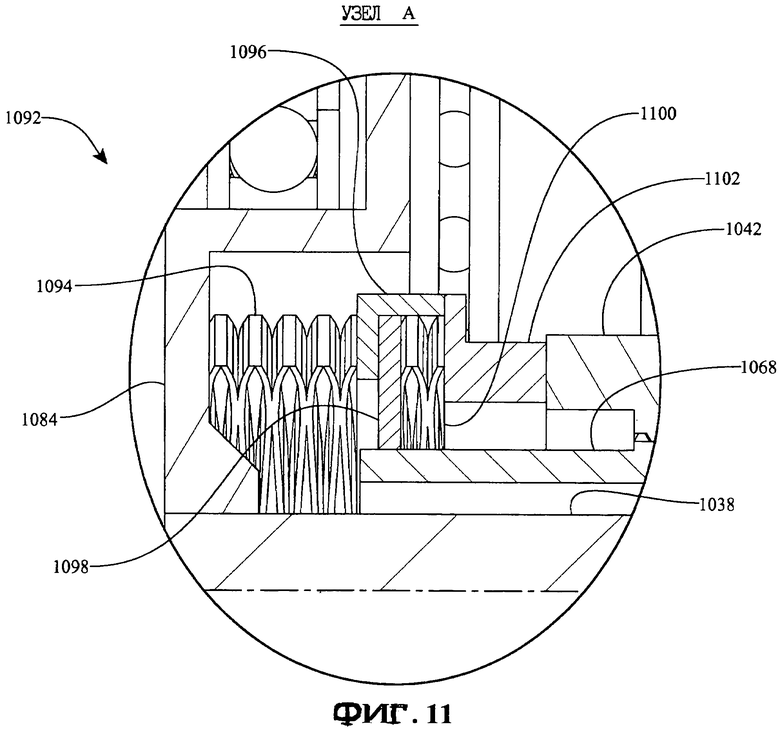
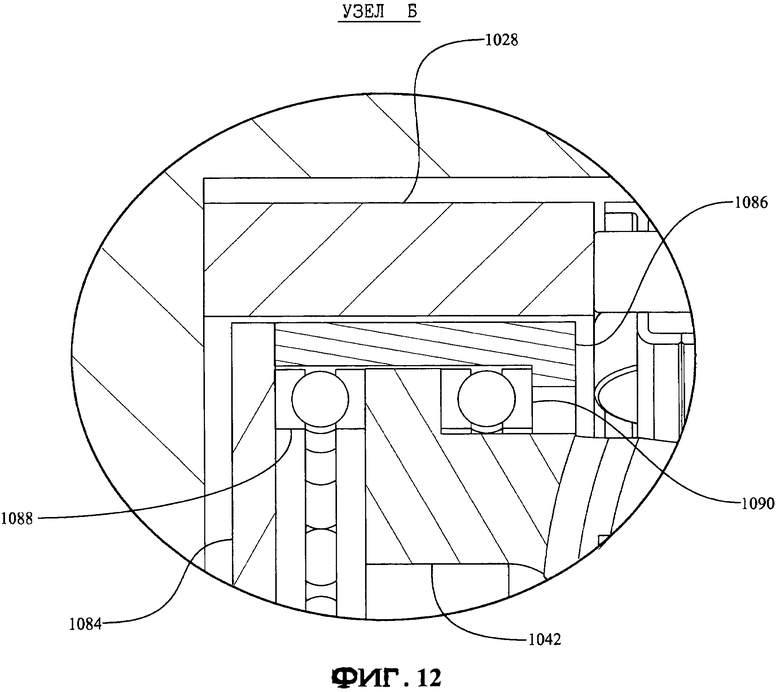
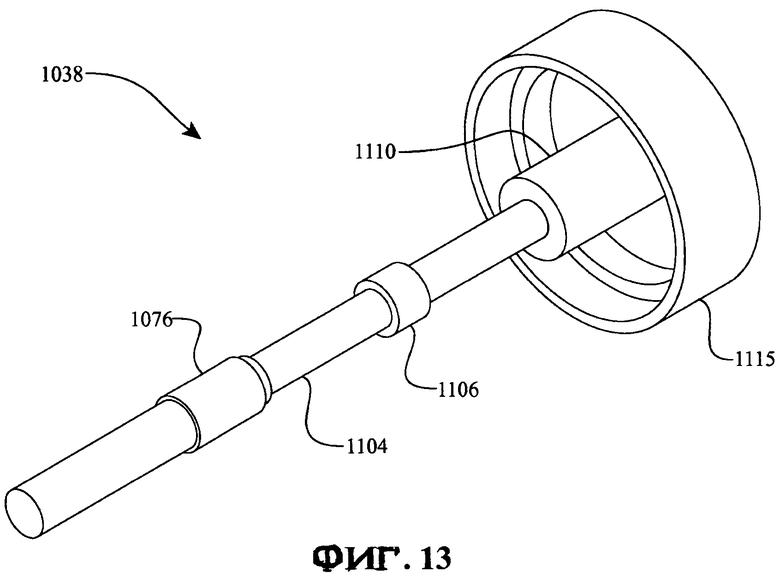
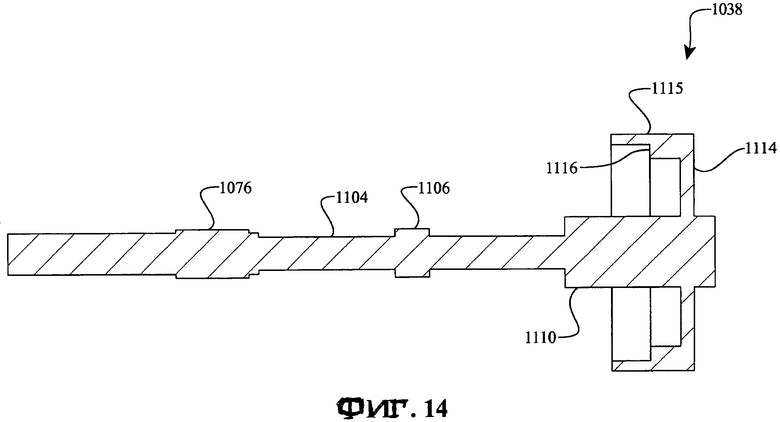
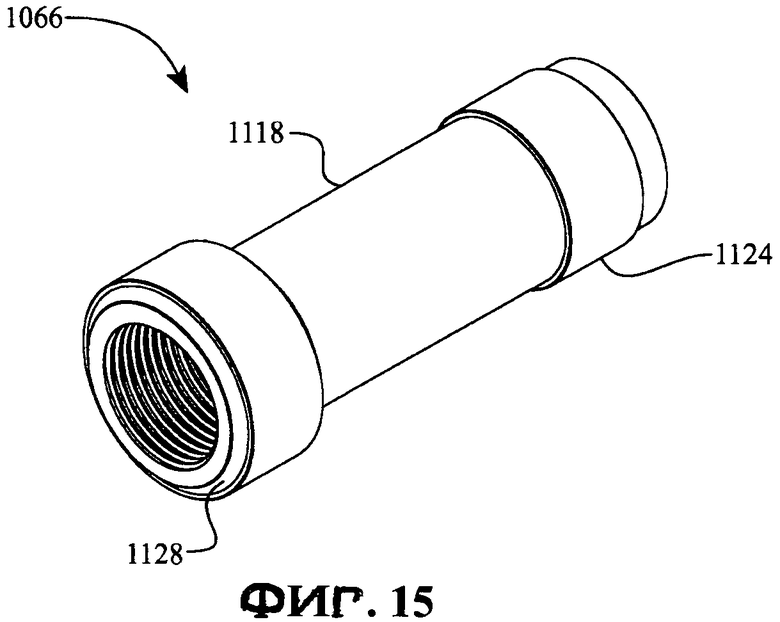
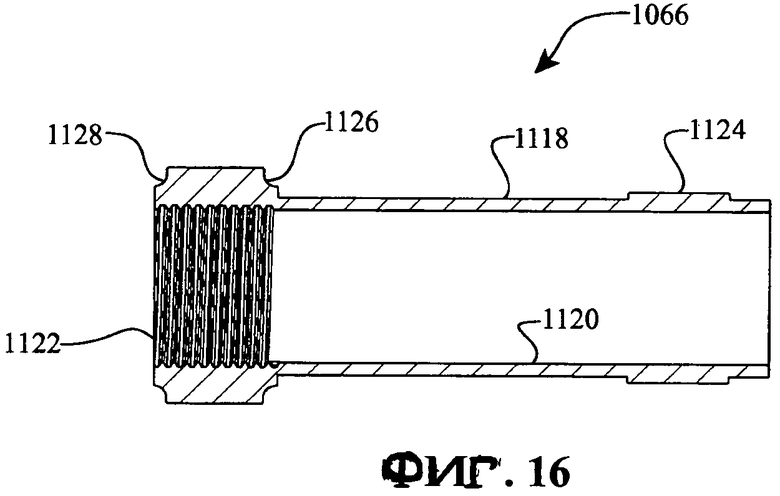
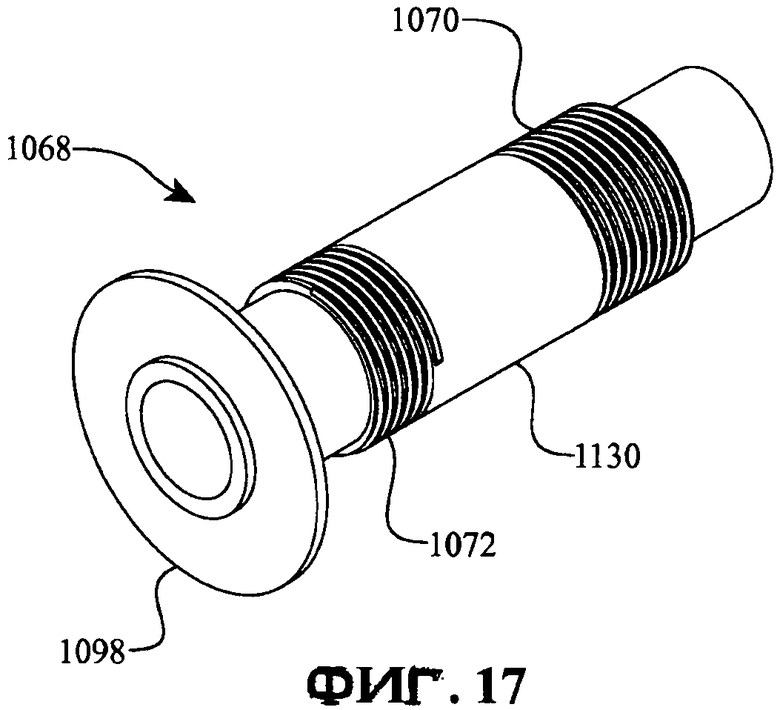
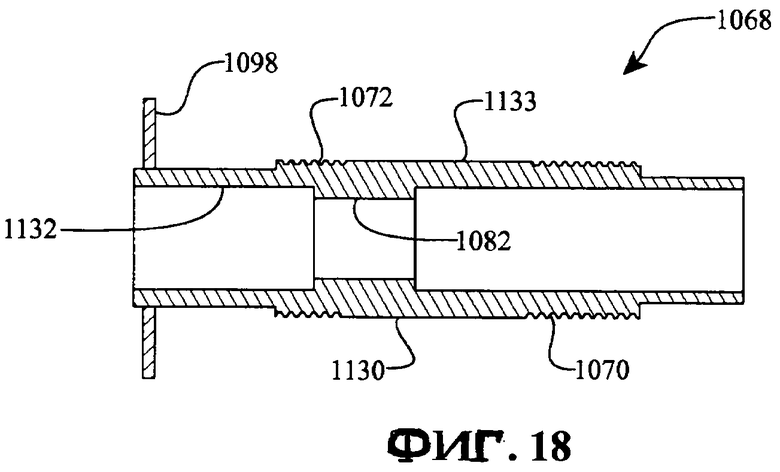
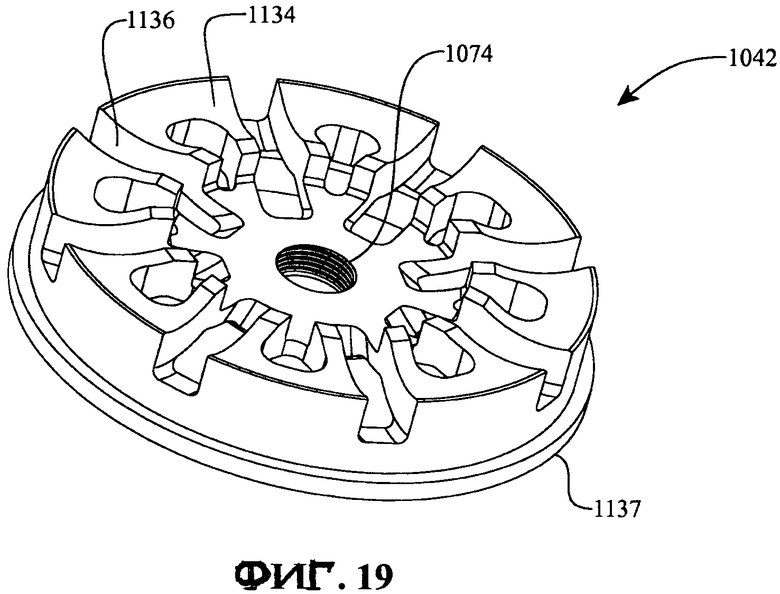
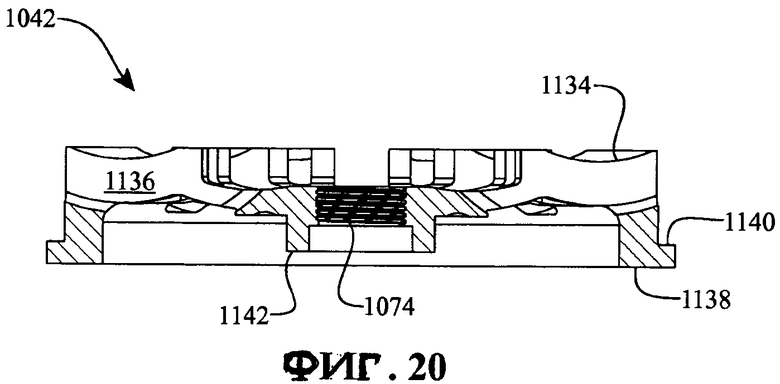
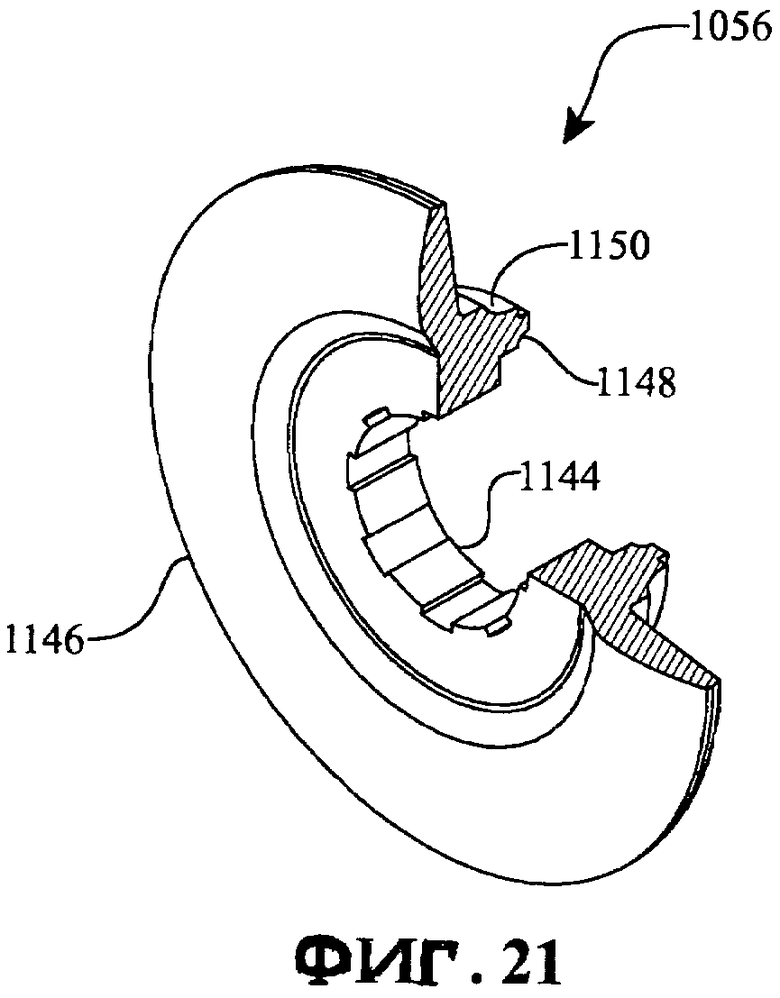
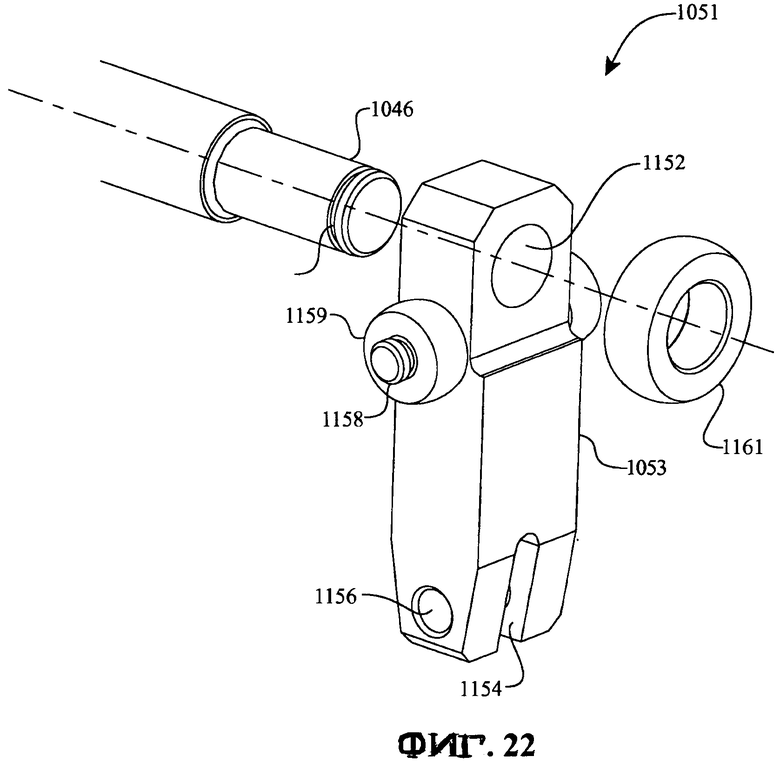
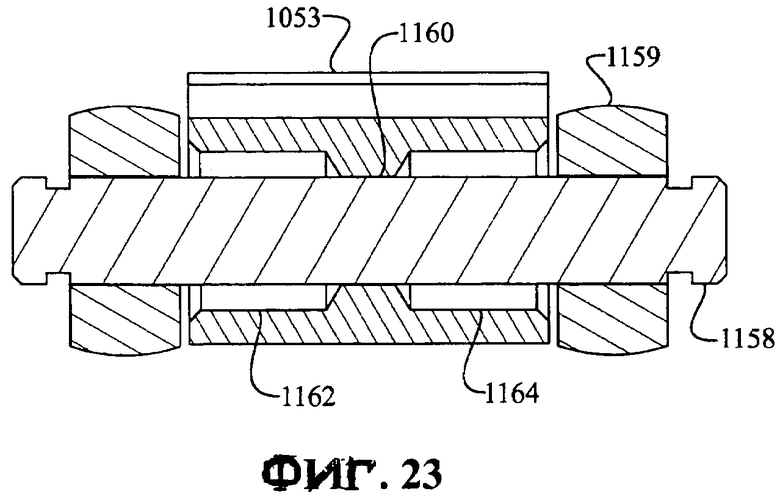
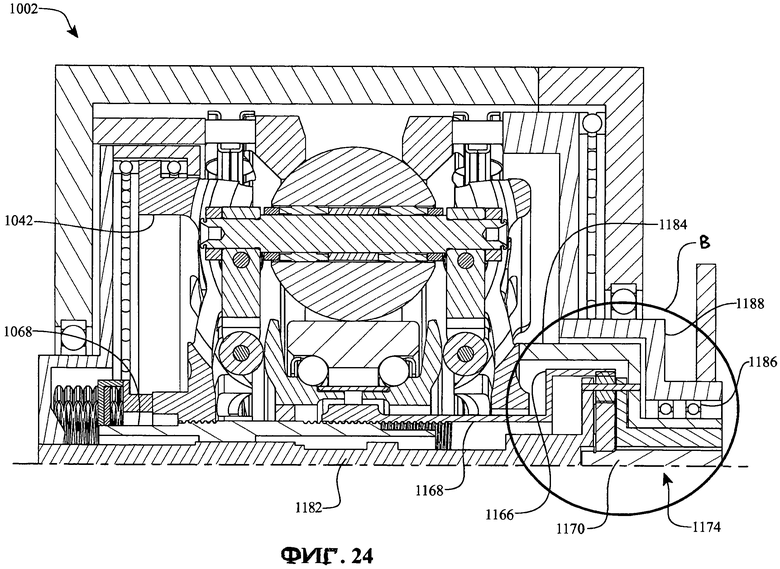
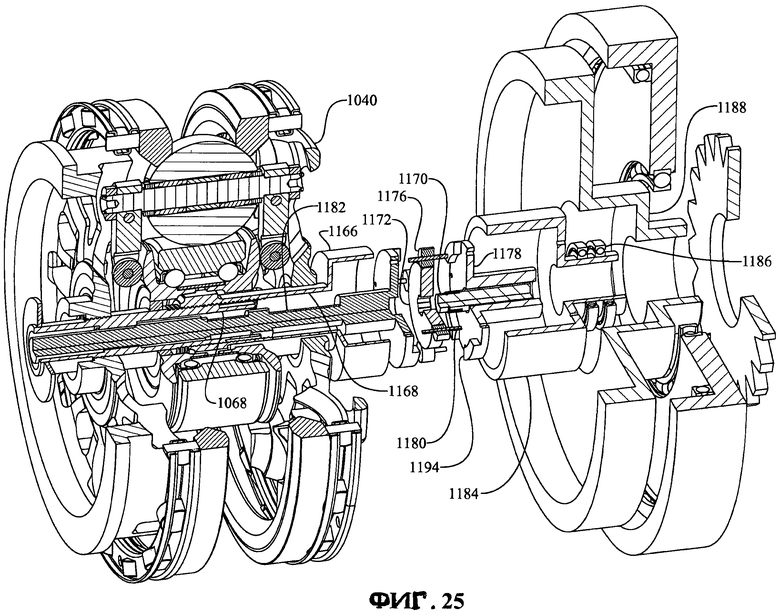
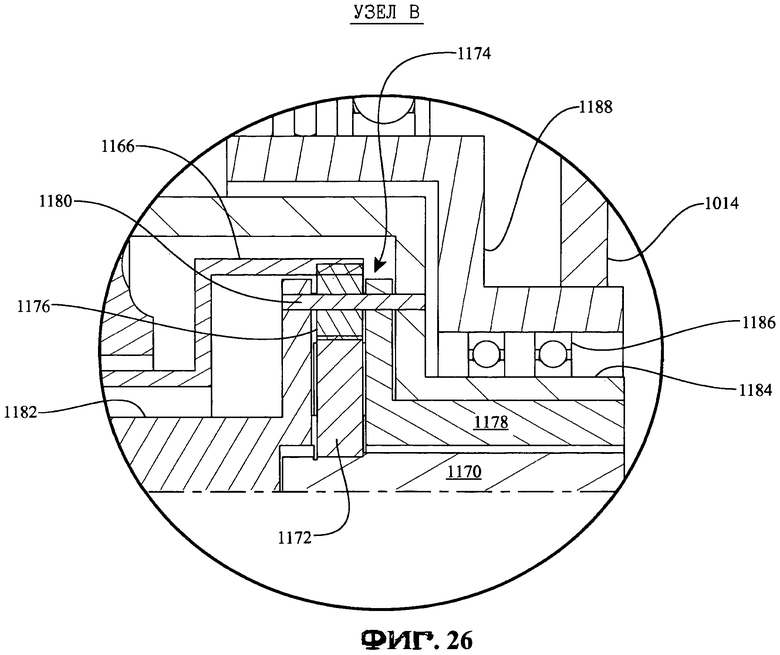
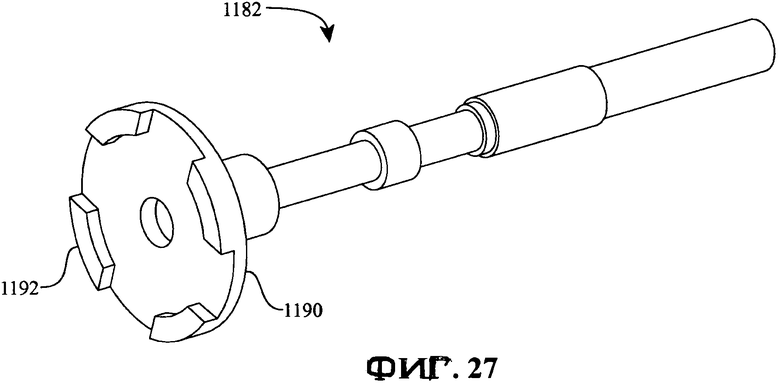
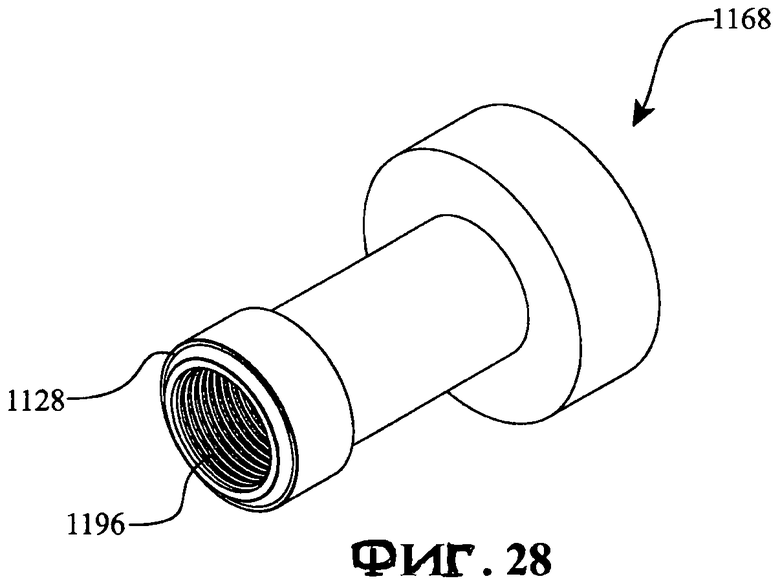
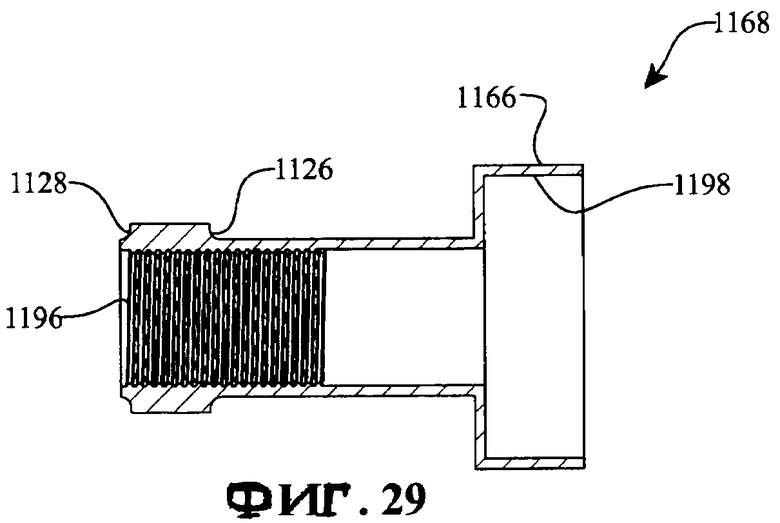
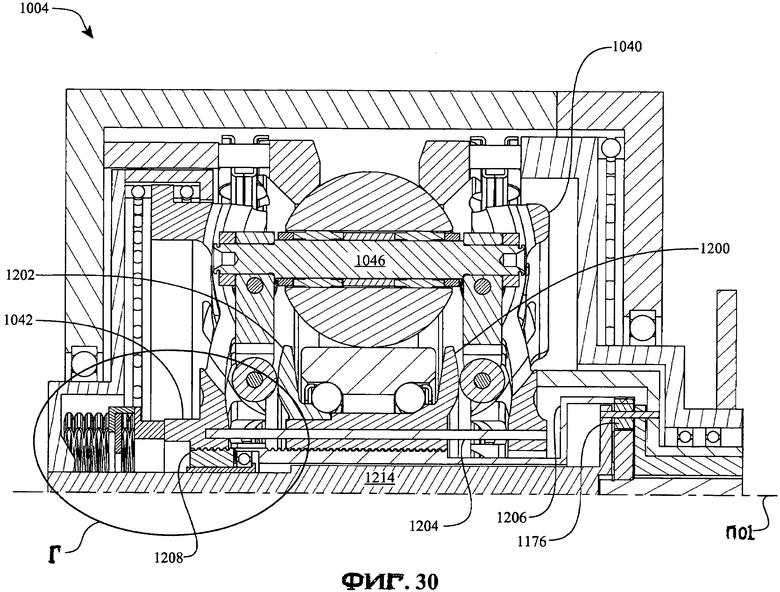
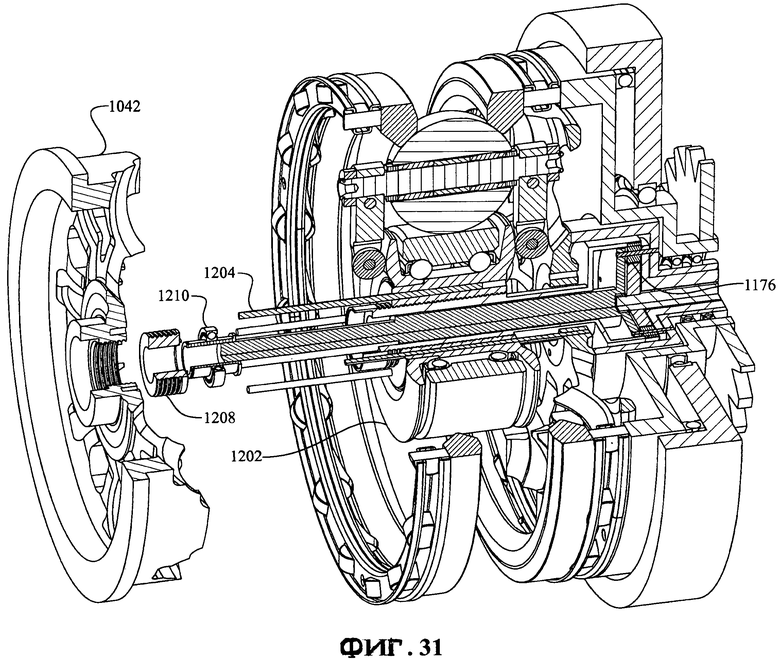
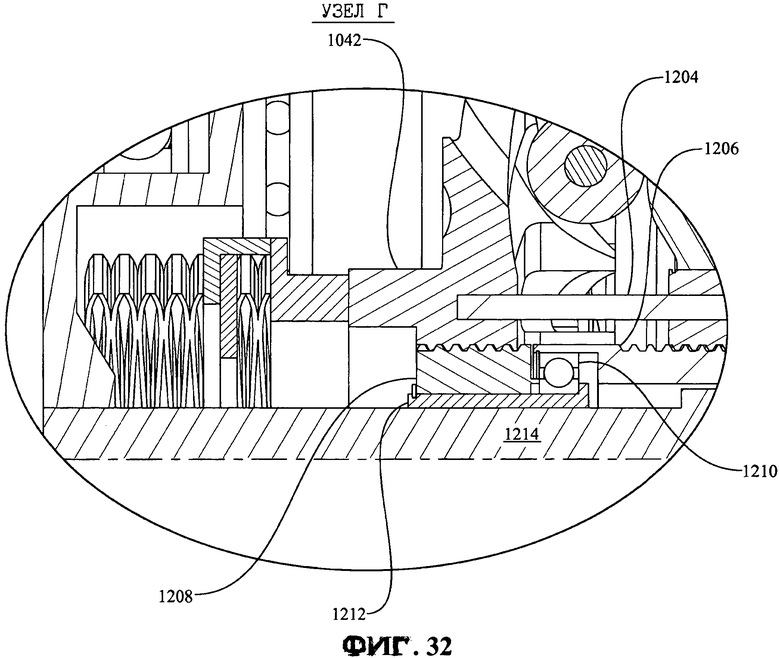
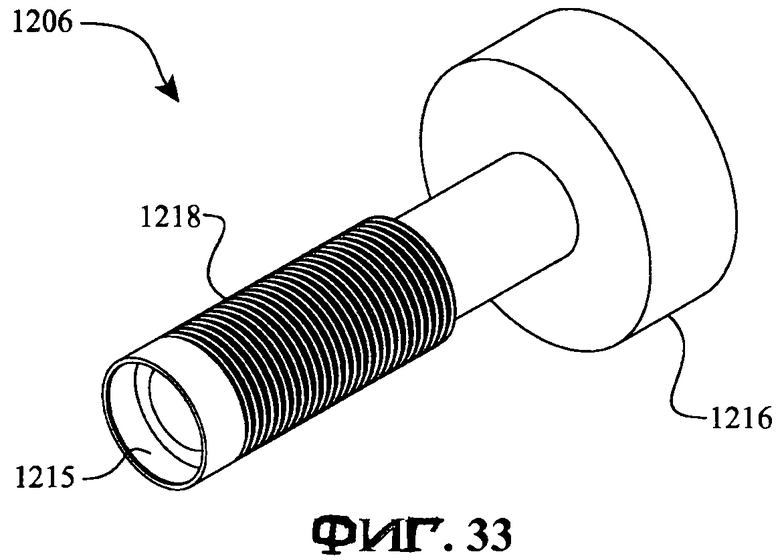
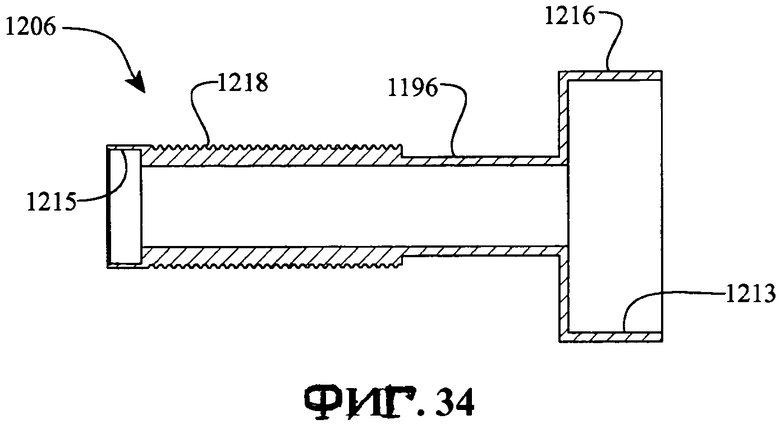
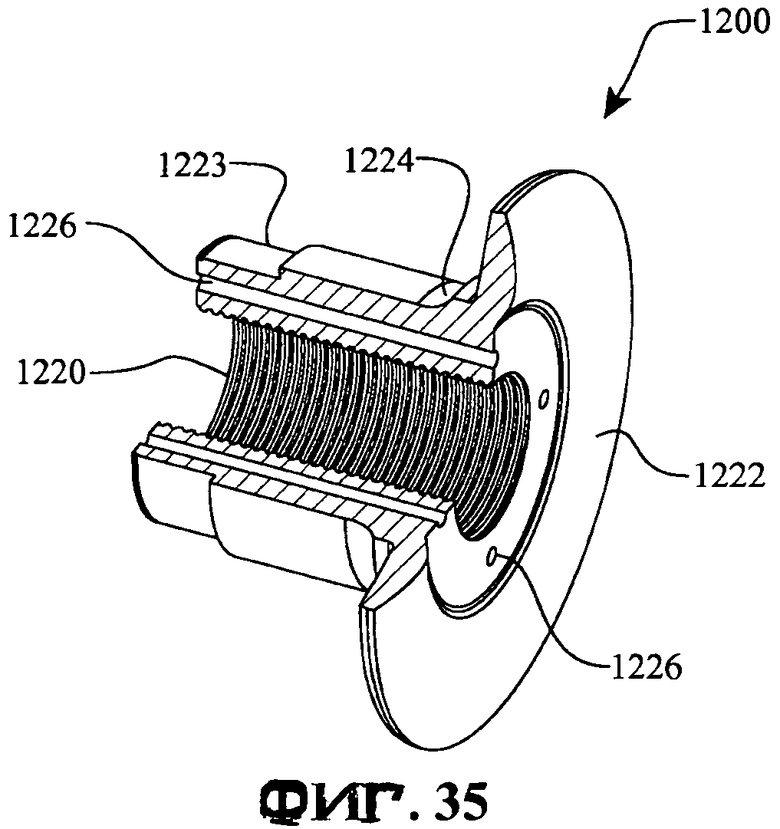
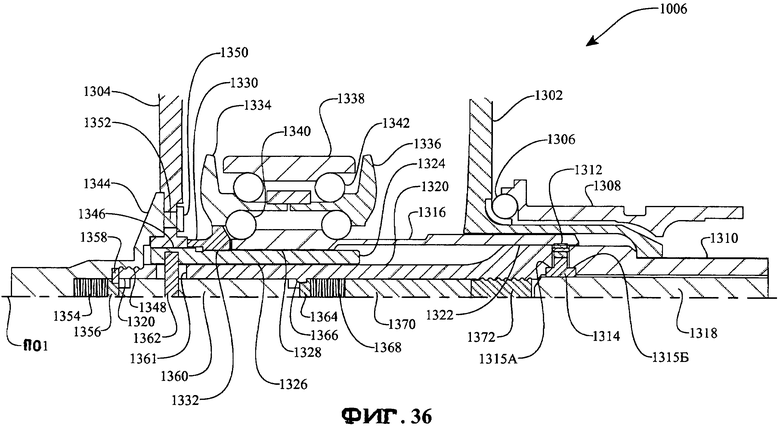
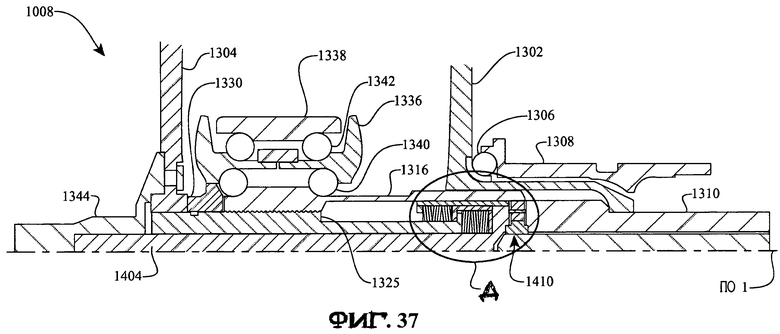
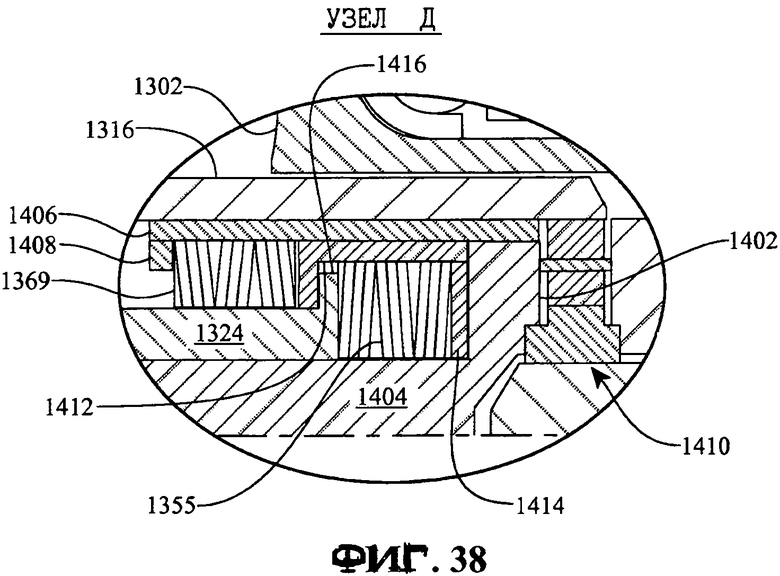
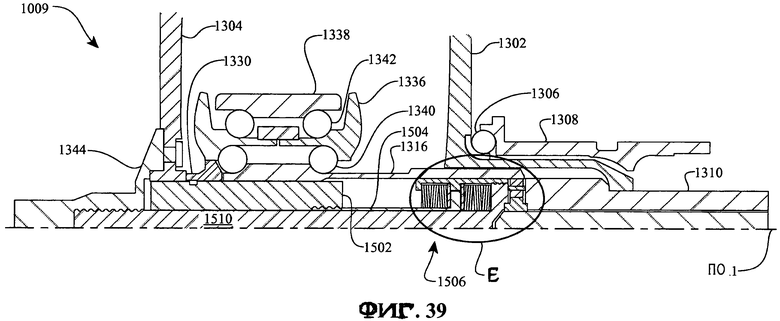
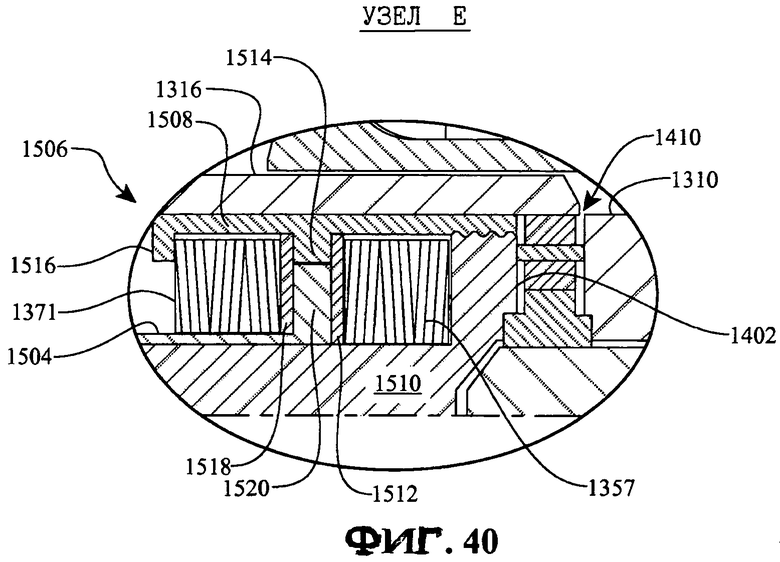
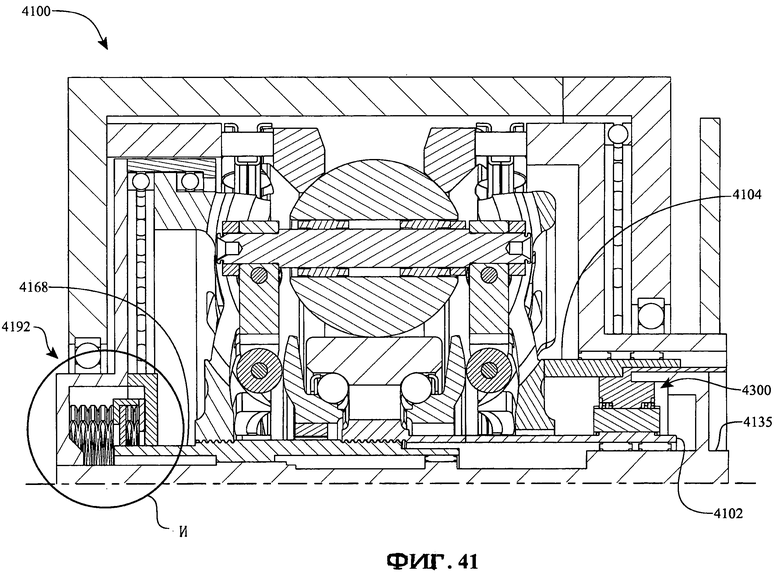
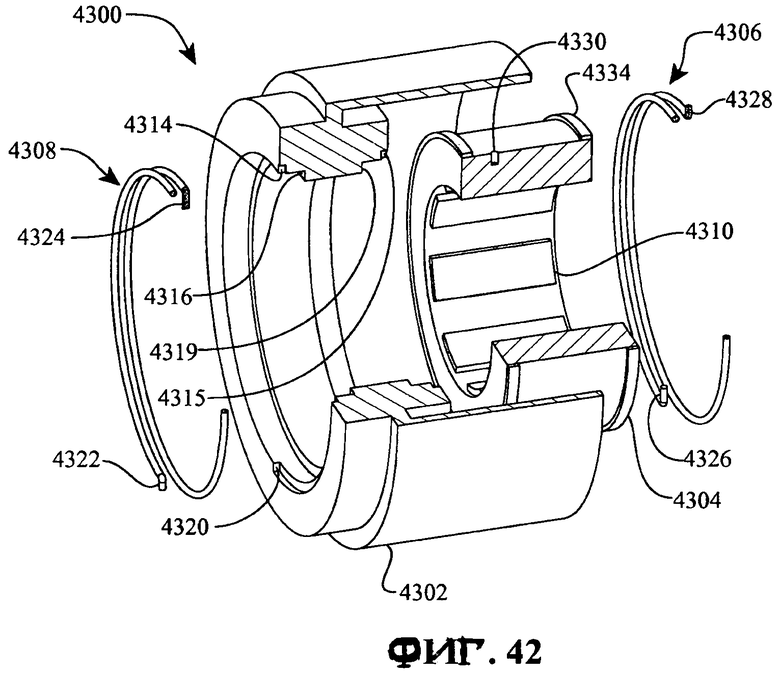
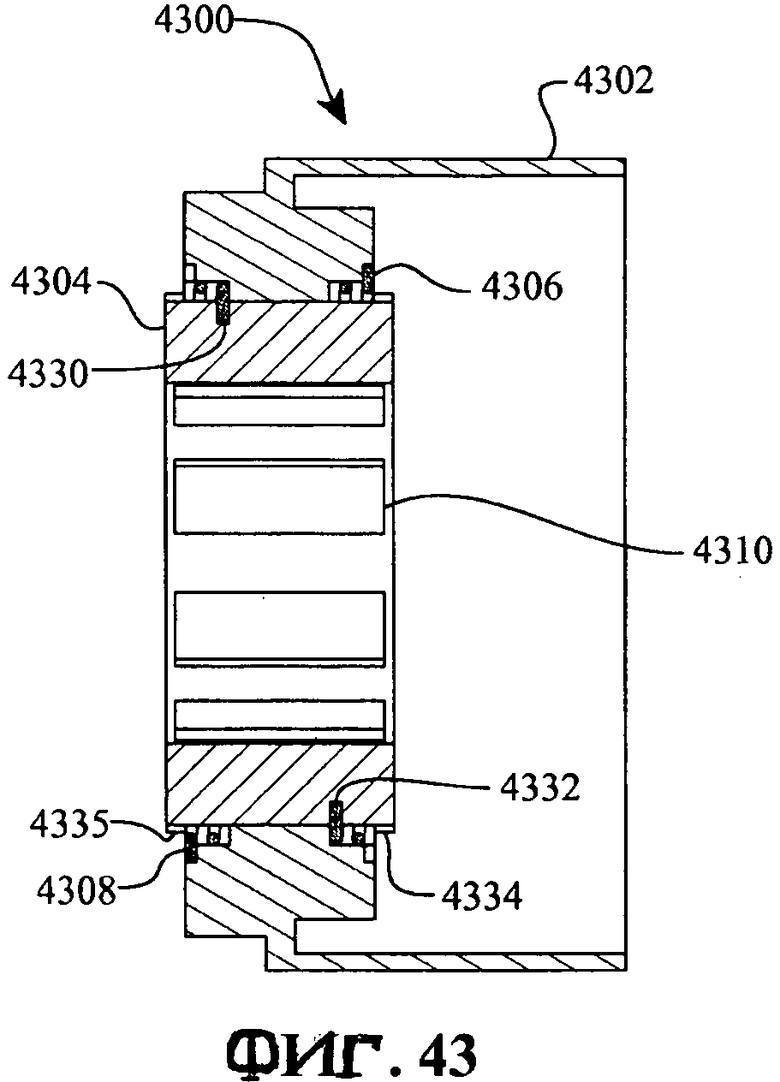
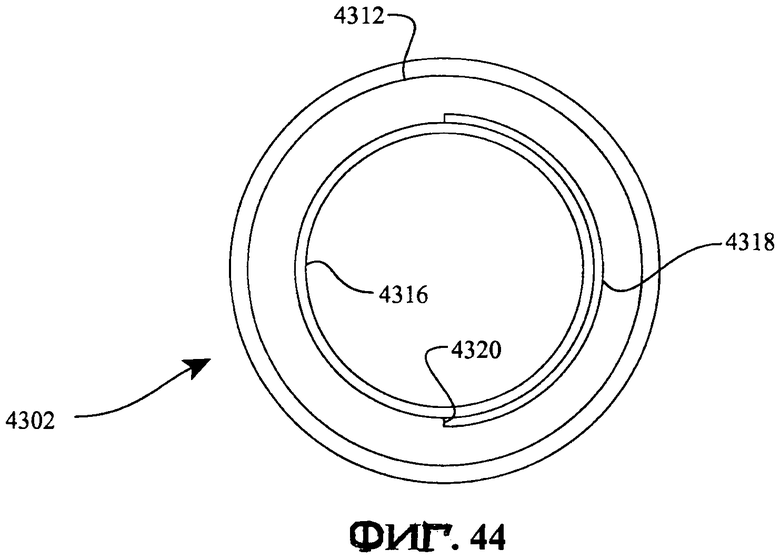
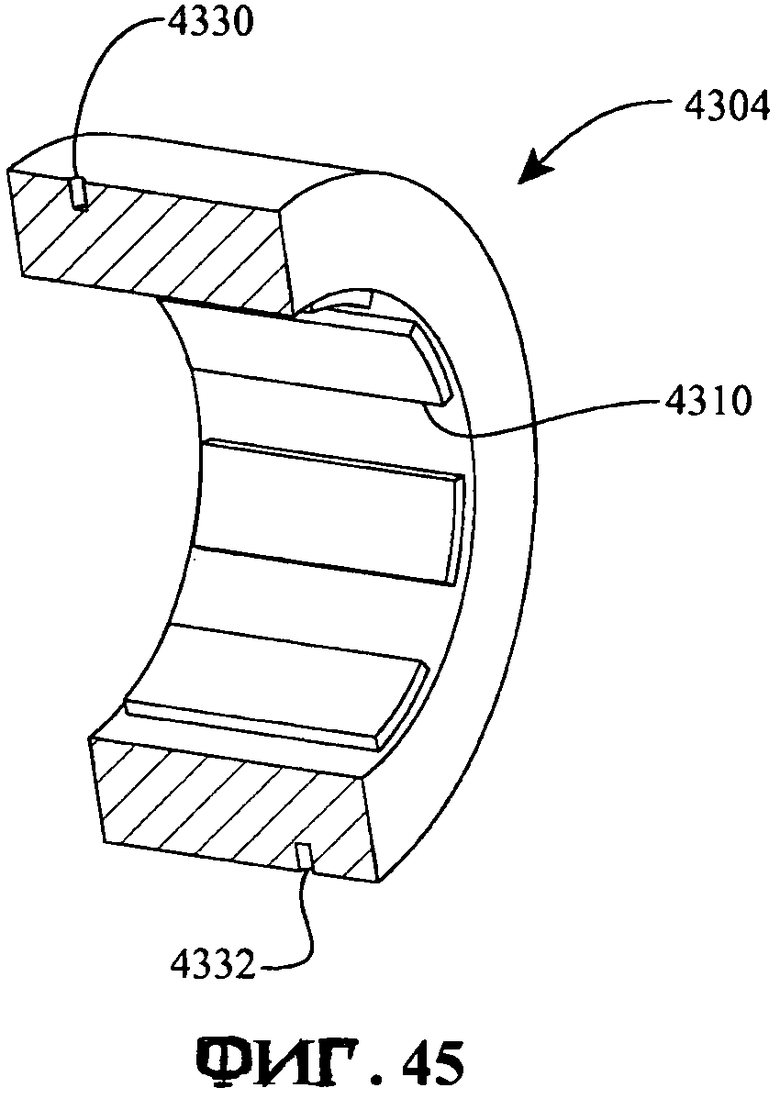
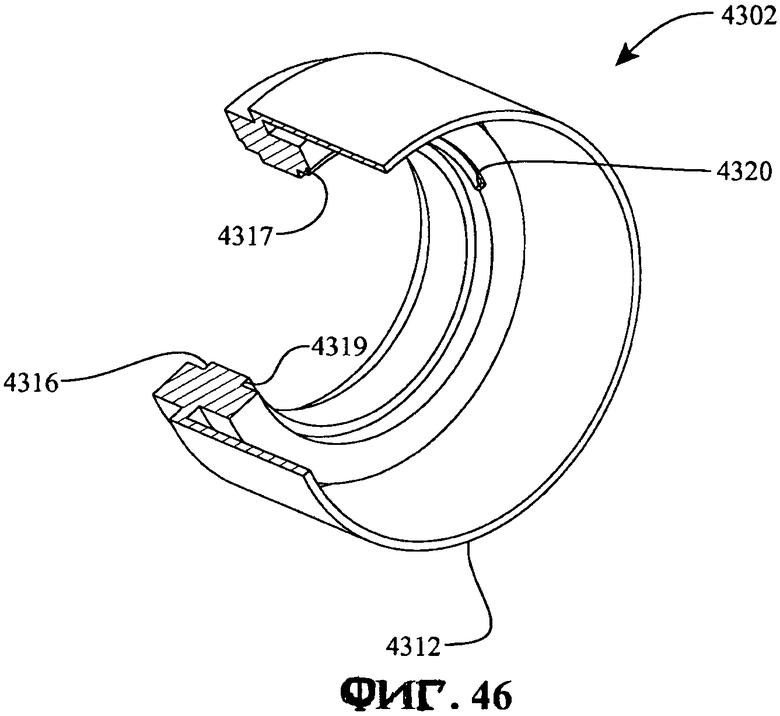
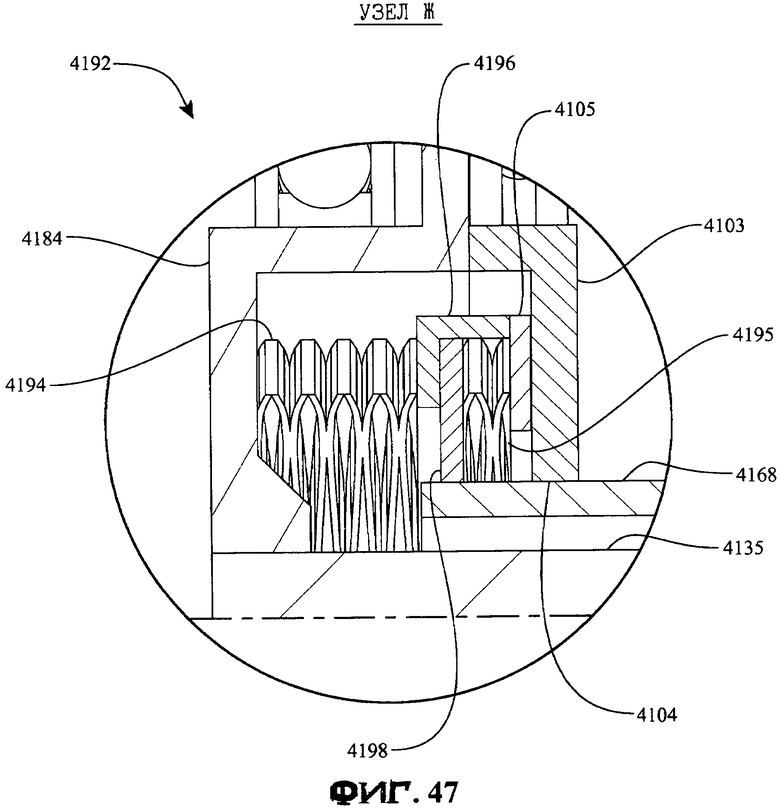
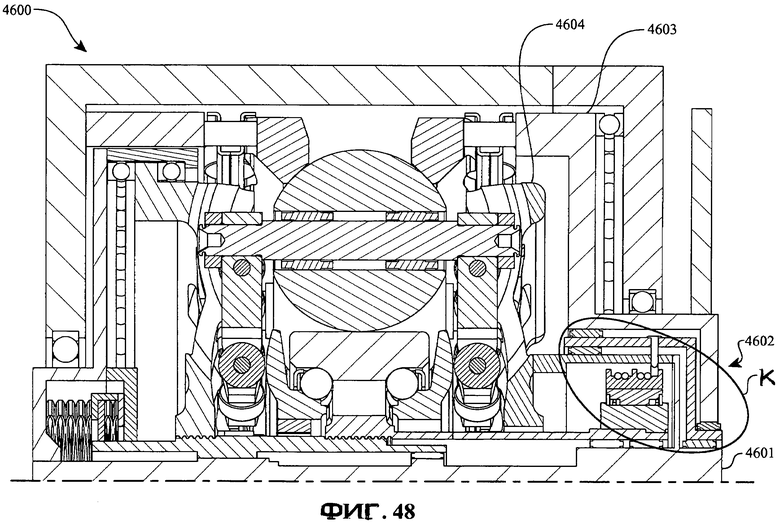
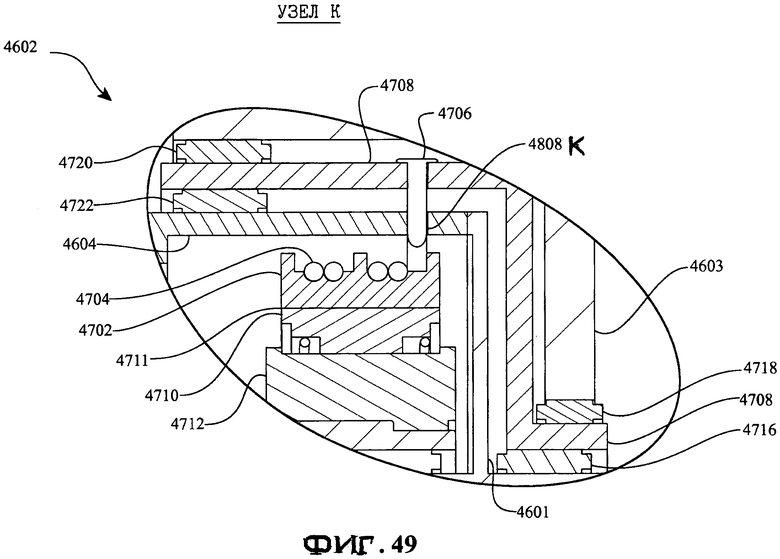
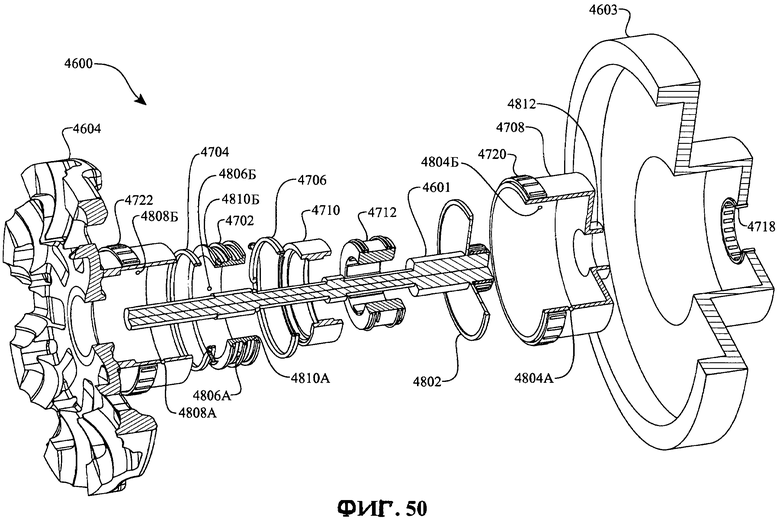
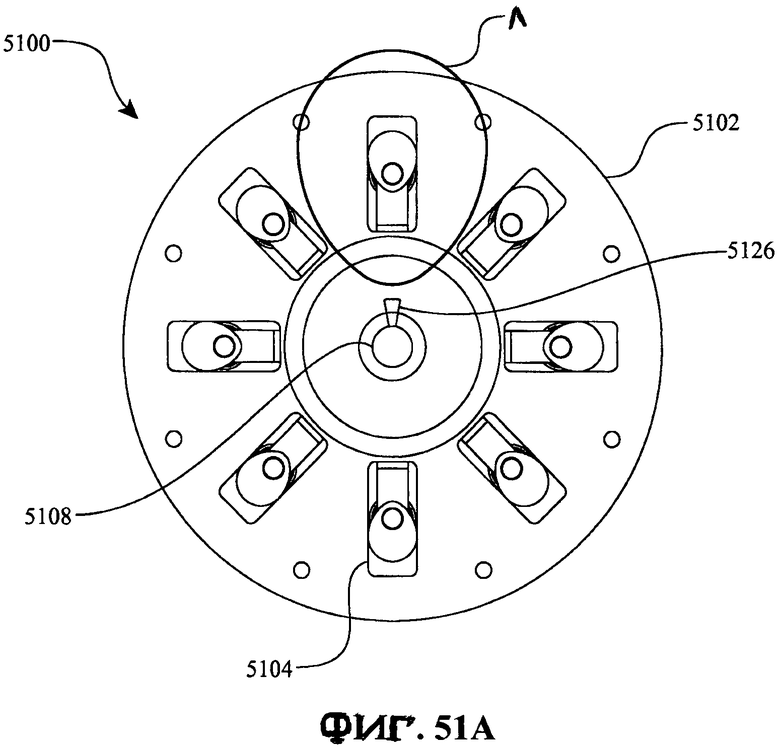
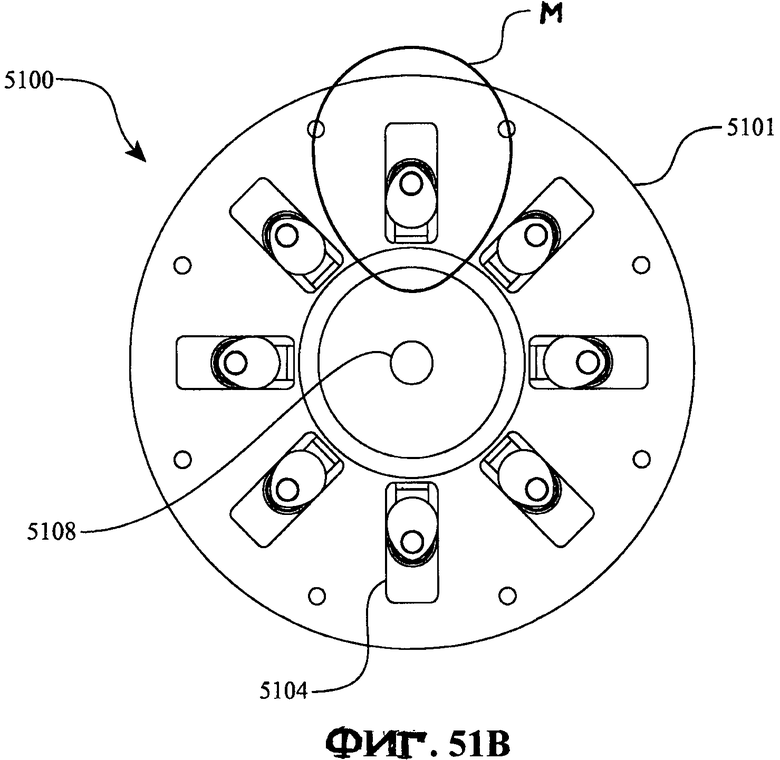
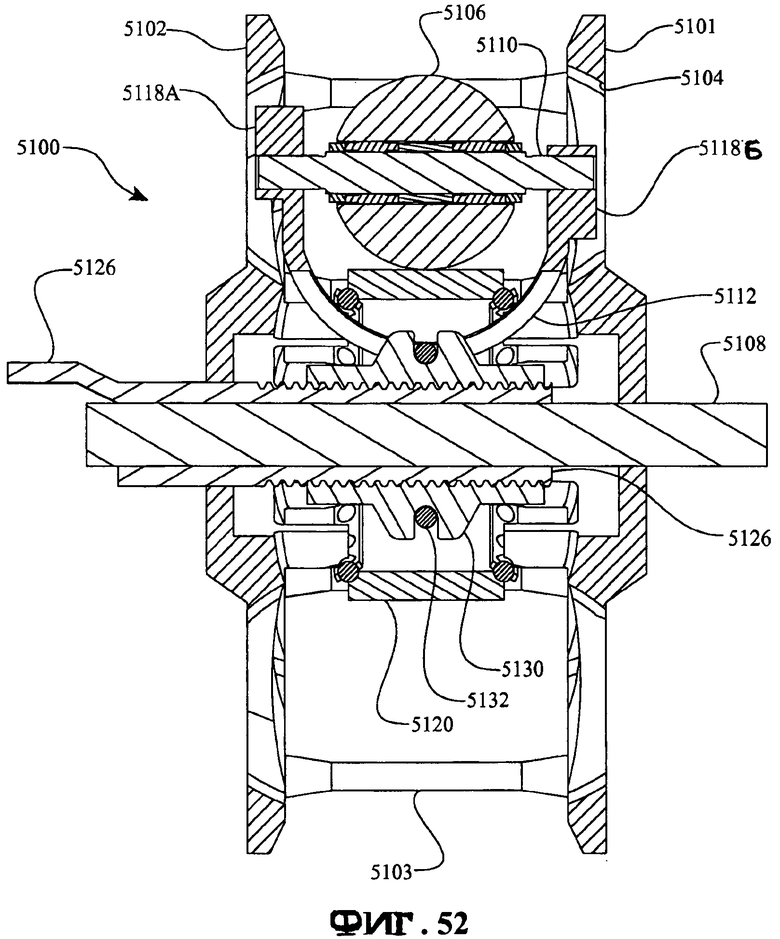
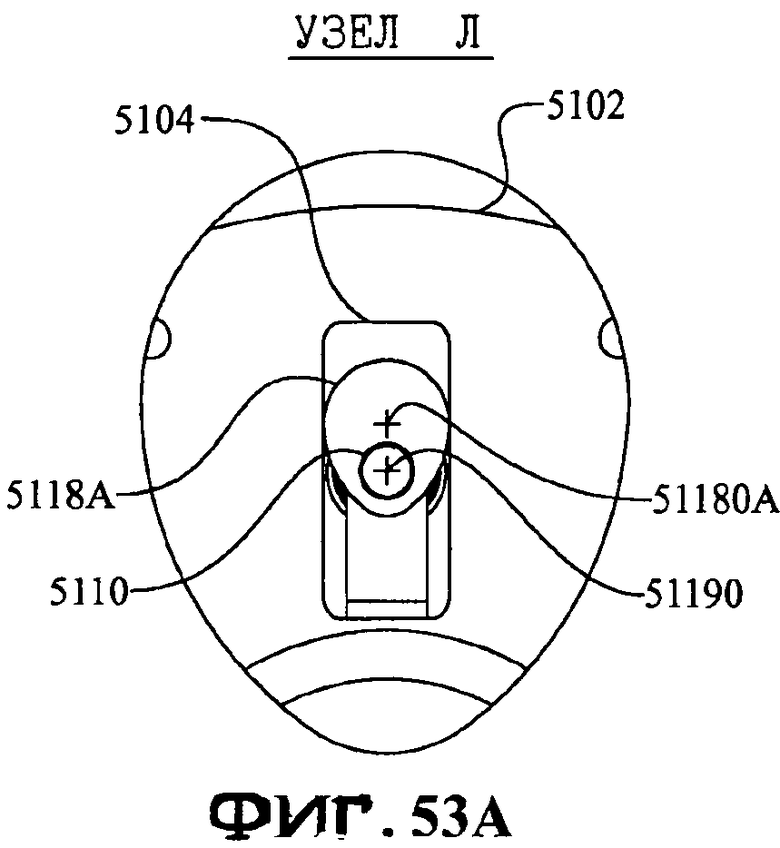
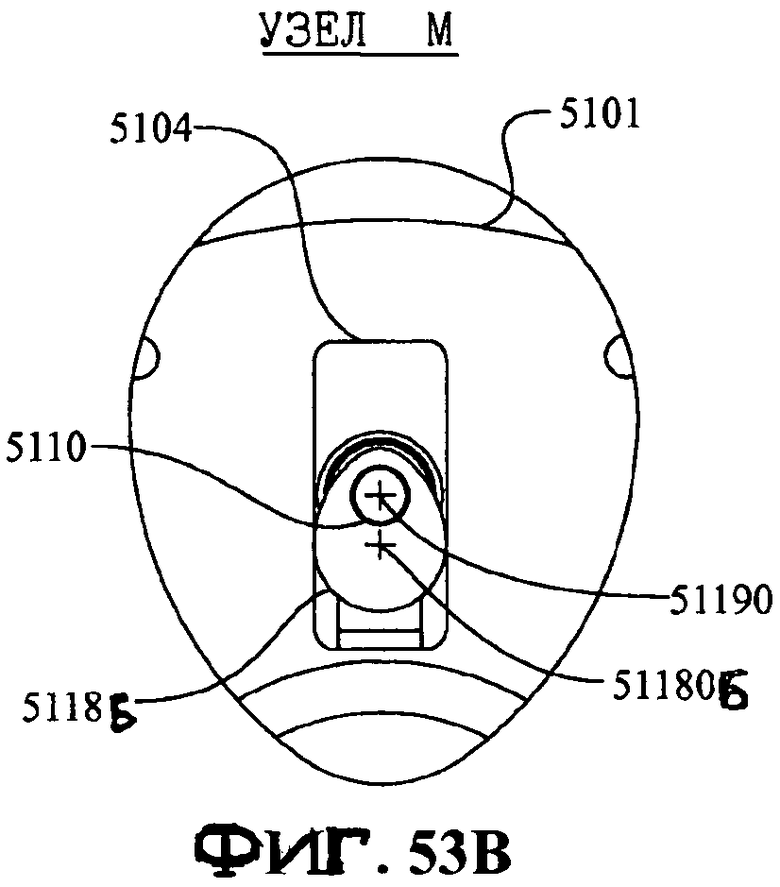
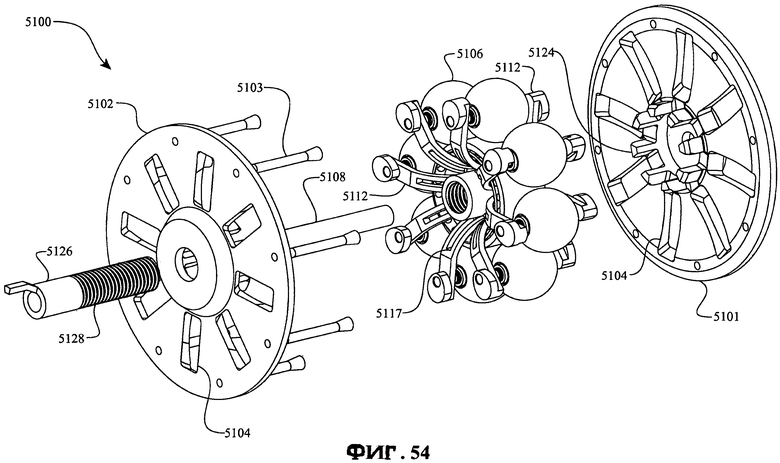
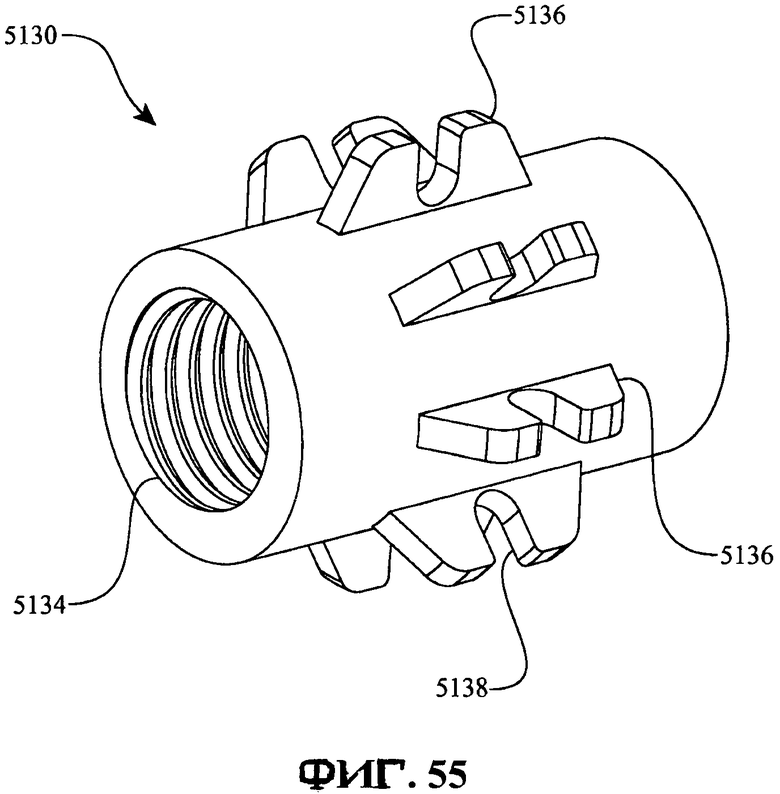
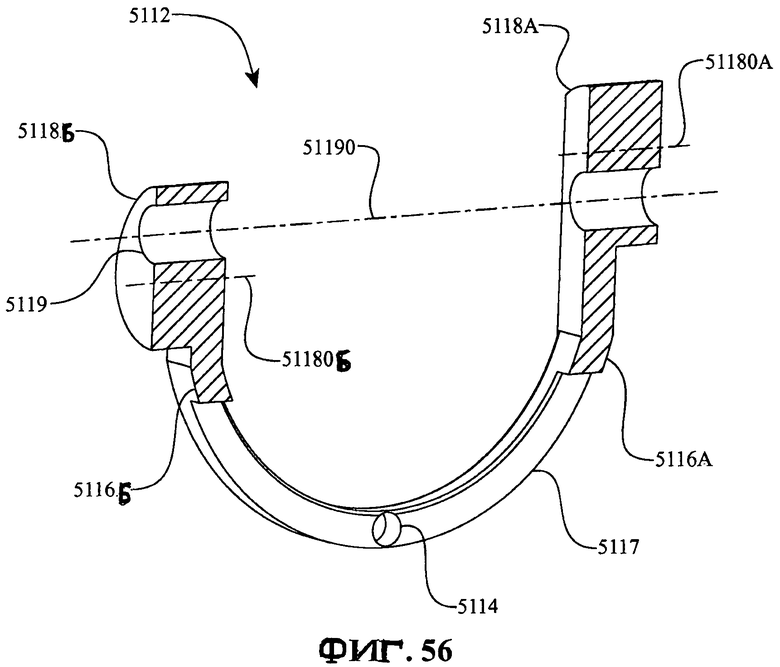
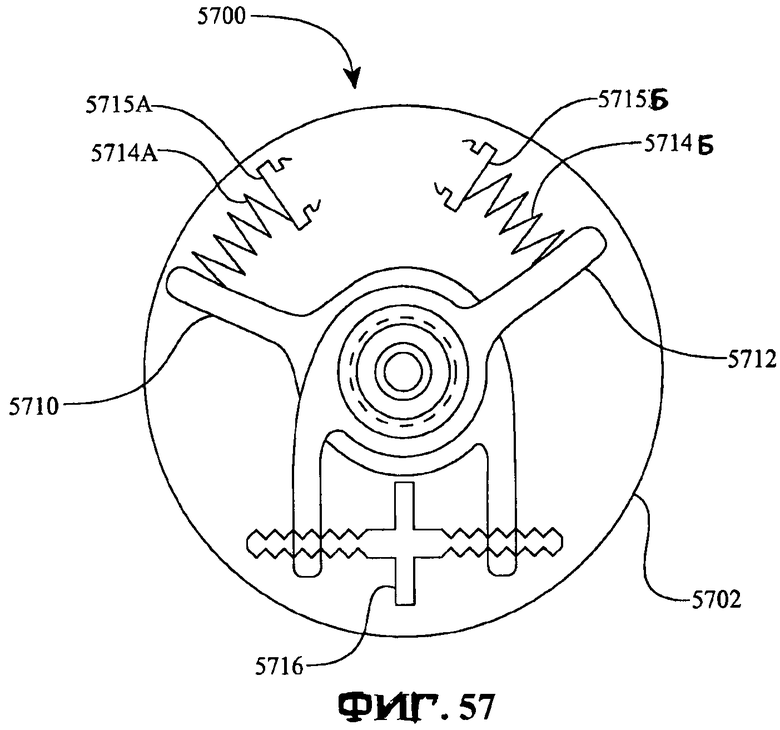
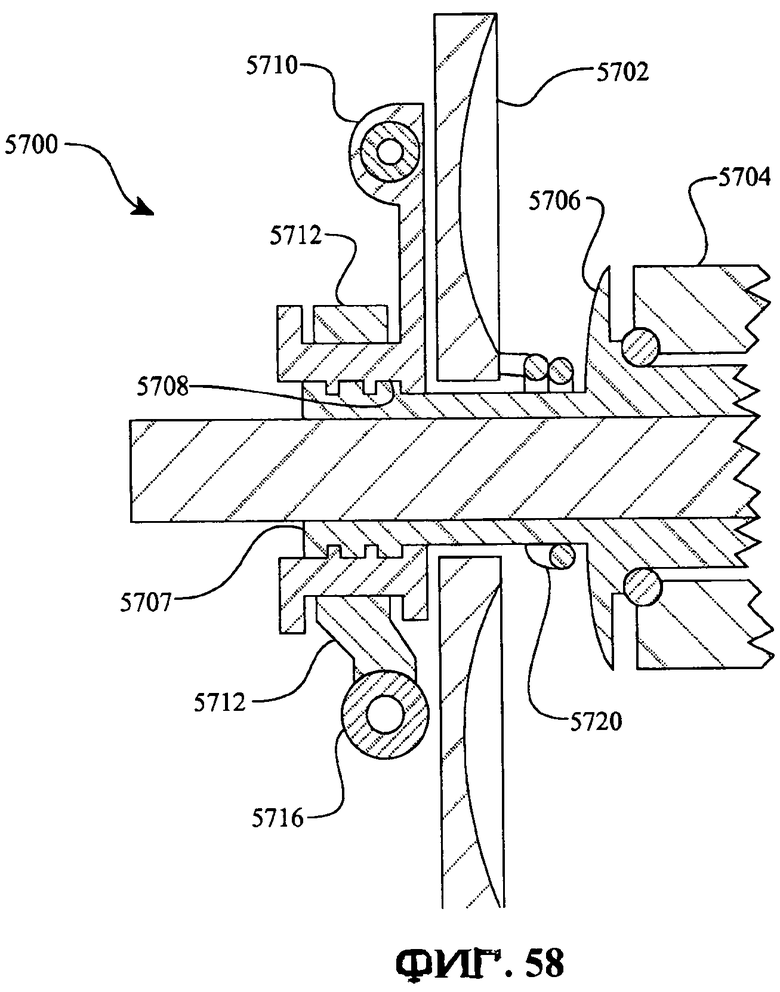
Изобретение относится к трансмиссиям с бесступенчатым изменением скорости. Трансмиссия содержит множество тяговых сферических планетарных механизмов, множество планетарных осей, крепежные плиты и систему контроля. Каждая планетарная ось функционально соединена с каждым сферическим планетарным механизмом, причем каждая планетарная ось определяет наклон оси вращения каждого тягового сферического планетарного механизма и установлена с возможностью обеспечения углового перемещения в первой и второй плоскостях. Первая крепежная плита функционально связана с первым концом каждой из планетарных осей. вторая крепежная плита функционально связана со вторым концом каждой из планетарных осей. Первая и вторая крепежные плиты сформированы для вращения вокруг продольной оси и относительно друг друга. Также раскрыты способ контроля трансмиссии с бесступенчатым изменением скорости и способ осуществления регулировки соотношения скоростей трансмиссии. Достигаются повышение надежности и функционального контроля устройства. 4 н. и 15 з.п. ф-лы, 58 ил.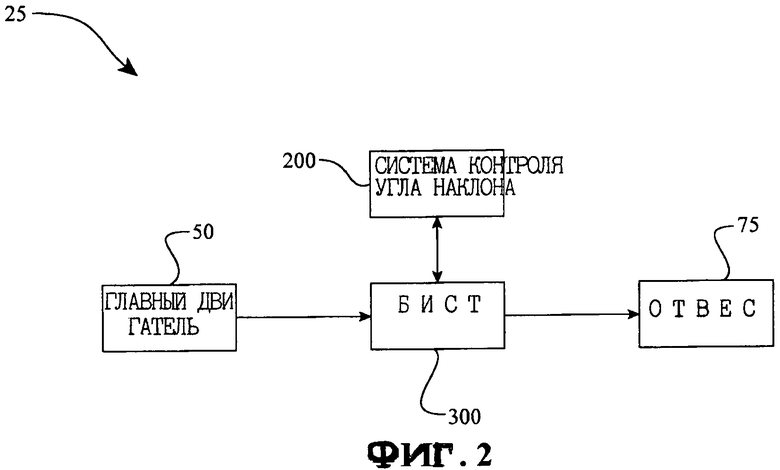
1. Способ контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей множество тяговых планетарных механизмов, включающий индицирование текущего функционального состояния БИСТ, включающее определение амплитуды осевого усилия, воздействующего на центральный тяговый механизм (солнце), при этом определяемая амплитуда является индикатором текущего состояния БИСТ; обеспечение каждого тягового сферического планетарного механизма планетарной осью с возможностью размещения каждой оси под углом наклона.
2. Способ осуществления регулировки соотношения скоростей трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей множество тяговых сферических планетарных механизмов, установленных под углом относительно продольной оси БИСТ, включающей индицирование текущего функционального состояния БИСТ посредством определения амплитуды осевого усилия, воздействующего на центральный тяговый механизм (солнце), при этом определяемая амплитуда является индикатором текущего функционального состояния БИСТ; размещение каждой планетарной оси под углом наклона и придание угла наклона каждой наклонной оси вращения.
3. Способ по п.2, в котором придание угла наклона каждой наклонной оси вращения включает обеспечение БИСТ наклонно-базовой системой контроля.
4. Способ контроля трансмиссии с бесступенчатым изменением скорости (БИСТ), имеющей множество тяговых сферических планетарных механизмов с наклонной осью вращения, включающий
обеспечение базовой контрольной индикацией желаемого функционального состояния БИСТ;
индицирование текущего функционального состояния БИСТ, включающее определение амплитуды осевого усилия, воздействующего на центральный тяговый механизм (солнце), при этом определяемая амплитуда является индикатором текущего состояния БИСТ,
сравнение желаемого и текущего функциональных состояний для формирования контрольной ошибки; и
придание каждой наклонной оси угла наклона, при этом угол наклона определяют, по меньшей мере, на основе контрольной ошибки.
5. Способ по п.4, в котором определение текущего функционального состояния осуществляют путем обеспечения осевой позиции тяговой планетарной коробки передач, при этом указанная осевая позиция является индикацией текущего функционального состояния БИСТ.
6. Способ по п.4, в котором придание угла наклона включает придание угла наклона крепежной плите трансмиссии.
7. Способ по п.4, в котором придание крепежной плите угла наклона включает накопление контрольной ошибки.
8. Способ по п.4, включающий обеспечение угла наклона планетарной оси, при этом определение значения изменения угла наклона планетарной оси основано, по меньшей мере, на значении угла наклона.
9. Способ по п.8, в котором наклон планетарной оси включает обеспечение трансмиссии интегратором, обеспечивающим перевод значения изменения угла наклона в угол наклона планетарной оси.
10. Способ по п.9, в котором придание угла наклона включает обеспечение трансмиссии функцией определения угла наклона на основании, по меньшей мере, угла наклона крепежной плиты БИСТ.
11. Способ по п.2, включающий регулировку отношения скоростей БИСТ на основании, по меньшей мере, значения угла наклона.
12. Способ по п.4, в котором индикация текущего функционального состояния трансмиссии включает индикацию силового воздействия на крепежную плиту БИСТ.
13. Способ по п.4, в котором индикация текущего функционального состояния трансмиссии включает индикацию силового воздействия на систему базового контроля.
14. Способ по п.4, в котором индикация текущего функционального состояния включает суммирование осевого силового воздействия, силового воздействия на крепежную плиту и силового воздействия на систему базового контроля угла наклона.
15. Способ по п.14, в котором индикация текущего функционального состояния включает обеспечение трансмиссии первым и вторым интеграторами, соединенными для осуществления упомянутого суммирования.
16. Способ по п.4, в котором обеспечение базового контроля включает обеспечение трансмиссии базовым соотношением скоростей и базовым вращающим моментом.
17. Трансмиссия, содержащая
множество тяговых сферических планетарных механизмов, установленных под углом к продольной оси трансмиссии;
множество планетарных осей, при этом каждая планетарная ось функционально соединена с каждым сферическим планетарным механизмом, причем каждая планетарная ось определяет наклон оси вращения каждого тягового сферического планетарного механизма и установлена с возможностью обеспечения углового перемещения в первой и второй плоскостях;
первую крепежную плиту, функционально связанную с первым концом каждой из планетарных осей, при этом первая крепежная плита смонтирована на продольной оси трансмиссии;
вторую крепежную плиту, функционально связанную со вторым концом каждой из планетарных осей, при этом вторая крепежная плита установлена на продольной оси трансмиссии;
при этом упомянутые первая и вторая крепежные плиты сформированы для вращения вокруг продольной оси и относительно друг друга;
систему контроля для индикации текущего функционального состояния БИСТ на основе определенной амплитуды осевого усилия, воздействующего на центральный тяговый солнечный механизм.
18. Трансмиссия по п.17, в которой в процессе вращения первой крепежной плиты относительно второй крепежной плиты формируется угол вращения каждой планетарной оси.
19. Трансмиссия по п.17, в которой угол наклона обеспечивает регулировку осевого наклона каждой из планетарных осей.
| US 2005255957 A1, 17.11.2005 | |||
| Пресс | 1983 |
|
SU1165545A1 |
| JP 2003336732 A, 28.11.2003 | |||
| US 4744261 A, 17.05.1988 | |||
| WO 03100294 A1, 04.12.2003 | |||
| Бесступенчатая реверсивная фрикционная передача | 1945 |
|
SU69503A1 |

