Область техники
[1] Изобретение относится к области подъемных механизмов, в частности к лебедкам, главным образом предназначенным для использования на вертолетах.
Предпосылки к созданию изобретения
[2] Современные лебедки, устанавливаемые на вертолетах (далее также - вертолетные лебедки), обеспечивают возможность управления скоростью подъема и спуска груза, что реализуется через управление частотой вращения барабана при уборке и выпуске каната.
[3] Для выполнения уборки каната электродвигатель лебедки передает барабану крутящий момент, который превышает противодействующий крутящий момент, создаваемый на барабане весом груза и самого каната. В этом случае управление частотой вращения барабана может быть осуществлено через соответствующее управление частотой вращения электродвигателя, при этом техническая реализация такого управления является очевидной для специалиста в данной области техники. Таким образом, при уборке каната лебедка, как правило, функционирует в единственном возможном процессе.
[4] В противоположность этому выпуск кантата может быть осуществлен лебедкой в двух процессах ее работы, а именно в процессах принудительного выпуска и заторможенного выпуска каната.
[5] Процесс принудительного выпуска каната (далее также кратко – принудительный выпуск) задействуется главным образом тогда, когда канат выпускается без груза, а его собственный вес является недостаточным для раскручивания барабана с частотой, обеспечивающей желаемую скорость выпуска. Такая же ситуация может наблюдаться при спуске груза малого веса, но большого объема, когда восходящие потоки воздуха способны дополнительно уменьшить воздействие груза на канат. В процессе принудительного выпуска управление частотой вращения барабана осуществляется аналогично тому, как было описано для процесса уборки каната, т.е. посредством управления частотой вращения электродвигателя с использованием известных специалисту технологий.
[6] В свою очередь, процесс заторможенного выпуска каната (далее также кратко – заторможенный выпуск) задействуется в случае, когда вес груза является достаточно большим, чтобы вызвать раскрутку барабана и выпуск каната со скоростью, которая является слишком высокой для безопасного спуска груза. В процессе заторможенного выпуска частота вращения барабана управляется посредством ее искусственного ограничения, или другими словами, через контролируемое торможение барабана, которое может быть осуществлено различными технологическими приемами.
[7] Патентная публикация US2020309216A1, 01.10.2020 раскрывает вертолетную лебедку, в которой заторможенный выпуск каната осуществляется с помощью фрикционной передачи, создающей на барабане тормозящее усилие, пропорциональное весу груза. Данная лебедка характеризуется сложностью конструкции, а также имеет недостаток, связанный с износом фрикционных элементов и необходимостью принятия мер, компенсирующих вызванное данным фактором изменение толщины фрикционных элементов.
[8] Из патентной публикации US4902954A, 20.02.1990 известно подъемное устройство для лифта. Для заторможенного выпуска каната электродвигатель данного подъемного устройства переводится в генераторный режим, при этом вырабатываемое им напряжение отдается в питающую электросеть. В случае аварийного отключения питающей электросети обеспечивается экстренная остановка барабана, для чего вырабатываемое электродвигателем напряжение перенаправляется на балластный резистор. Таким образом, в известном подъемном устройстве заторможенный выпуск каната осуществляется за счет соответствующего управления электродвигателем, что значительно упрощает конструкцию и позволяет отказаться от сложных кинематических схем.
[9] Тем не менее, использование данной конфигурации в вертолетной лебедке не представляется возможным по следующим причинам. Во-первых, отдача рекуперированной электроэнергии в бортовую электросеть вертолета не может быть осуществлена ввиду необходимости соблюдения действующих в авиации жестких требований по стабилизации напряжения в бортовой электросети. А во-вторых, использование балластного резистора в известном подъемном устройстве подразумевает только полную остановку барабана, изначально вращающегося с определенной частотой, в то время как в вертолетной лебедке контролируемое торможение барабана должно обеспечивать изменение частоты его вращения в широких пределах.
[10] Техническая проблема, стоящая перед изобретением, состоит в разработке вертолетной лебедки, отличающейся простотой конструкции и способной обеспечивать спуск груза в широком диапазоне скоростей.
Сущность изобретения
[11] Для решения указанной технической проблемы в качестве изобретения предложена лебедка, содержащая барабан, на который намотан трос, синхронный электродвигатель, имеющий силовую связь с барабаном и способный при выпуске троса работать в двигательном и генераторном режиме, а также блок управления. Электродвигатель соединен с трехфазной сетью переменного тока через выпрямитель, выполненный на основе мостовой диодной схемы, и инвертор, к которому параллельно с выпрямителем присоединен тормозной модуль. Тормозной модуль содержит конденсатор, резистор и транзисторный ключ. Конденсатор имеет параллельное соединение с последовательно соединенными друг с другом резистором и транзисторным ключом. Во время работы электродвигателя в генераторном режиме блок управления способен замыкать транзисторный ключ, когда напряжение на конденсаторе повышается до первой пороговой величины, и размыкать транзисторный ключ, когда напряжение на конденсаторе снижается до второй пороговой величины, которая меньше первой пороговой величины, но выше максимального напряжения на выходе выпрямителя.
[12] Технический результат изобретения состоит в том, что эффективное торможение барабана может быть обеспечено на любой частоте его вращения при поддержании силы тока, протекающего через резистор, в ограниченном диапазоне.
[13] Причинно-следственная связь между признаками изобретения и техническим результатом заключается в следующем. Для удовлетворения требований потребителей и решения поставленной технической проблемы предложенная лебедка способна выпускать канат в широком диапазоне скоростей, что обеспечивается возможностью вращения барабана в широком диапазоне частот. Поскольку при работе электродвигателя в генераторном режиме вырабатываемое электродвигателем напряжение пропорционально частоте вращения ротора, связанного с барабаном, то оно также подвержено значительному изменению. Однако резистор, являющийся балластным резистором, способен обеспечить эффективную отдачу тепла только в узком диапазоне напряжений, в котором сила тока, протекающего через резистор, имеет определенную величину, соответствующую сопротивлению резистора. Ограничение напряжения, подаваемого на резистор, в коридоре между первой и второй пороговыми величинами позволяет обеспечить оптимальные условия для работы резистора, а значит и эффективное торможение барабана на любой частоте его вращения. Данный эффект становится возможным благодаря тому, что величина тормозящего усилия в предложенной лебедке определяется не за счет изменения силы тока в резисторе, которая в данном случае находится в узком диапазоне, а за счет изменения частоты коммутации резистора с источником напряжения, в качестве которого выступает конденсатор.
[14] Кроме того, вторая пороговая величина установлена так, что она выше максимального напряжения на выходе выпрямителя, благодаря чему при осуществлении торможения барабана диоды выпрямителя поддерживаются в закрытом состоянии, и соединение тормозного модуля с трехфазной сетью переменного тока отсутствует. Данное решение позволяет отказаться от введения в схему лебедки дополнительных ключей и тем самым упростить ее конструкцию.
[15] В первом частном случае изобретения указанный выпрямитель является первым выпрямителем, а указанный конденсатор является первым конденсатором. Лебедка при этом содержит второй выпрямитель и второй конденсатор, причем второй выпрямитель соединен с указанной трехфазной сетью переменного тока и предназначен для получения выпрямленного напряжения с целью его измерения. Кроме того, второй выпрямитель выполнен на основе мостовой диодной схемы, а второй конденсатор соединен параллельно со вторым выпрямителем. Блок управления способен изменять первую и вторую пороговые величины так, чтобы разность между второй пороговой величиной и максимальным напряжением на втором конденсаторе, а также разность между первой и второй пороговыми величинами сохранялись неизменными. Данное исполнение позволяет обеспечить описанное выше функционирование тормозного модуля в случае изменения напряжения в трехфазной сети переменного тока.
[16] Во втором частном случае изобретения предложенная лебедка предназначена для использования на вертолете, бортовая электросеть которого получает питание исключительно от штатных источников напряжения. Благодаря введенному в конструкцию лебедки тормозному модулю лебедка получает канал утилизации энергии, выработанной в результате торможения барабана, а значит при осуществлении торможения барабана лебедка может работать автономно от питающей электросети. Данное преимущество позволяет использовать предложенную лебедку на вертолете, бортовая электросеть которого не способна принимать рекуперированную электроэнергию.
Краткое описание чертежей
[17] Осуществление изобретения будет пояснено ссылками на фигуры:
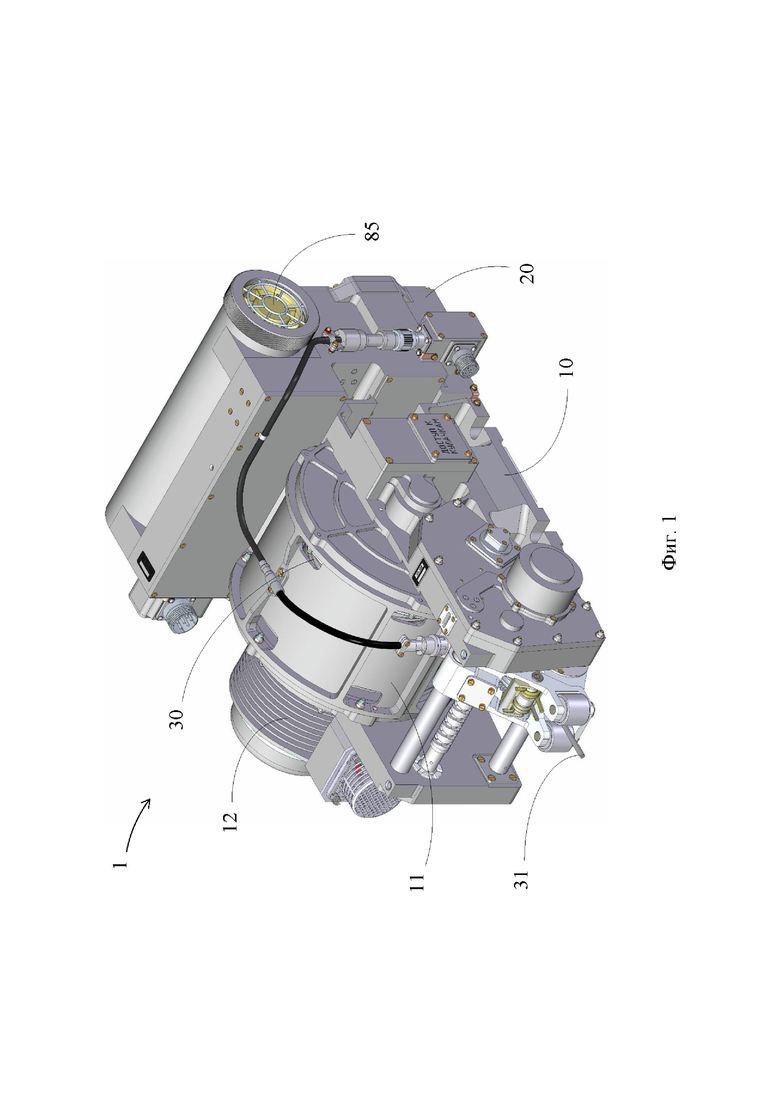
Фиг. 1 – общий вид предложенной лебедки;
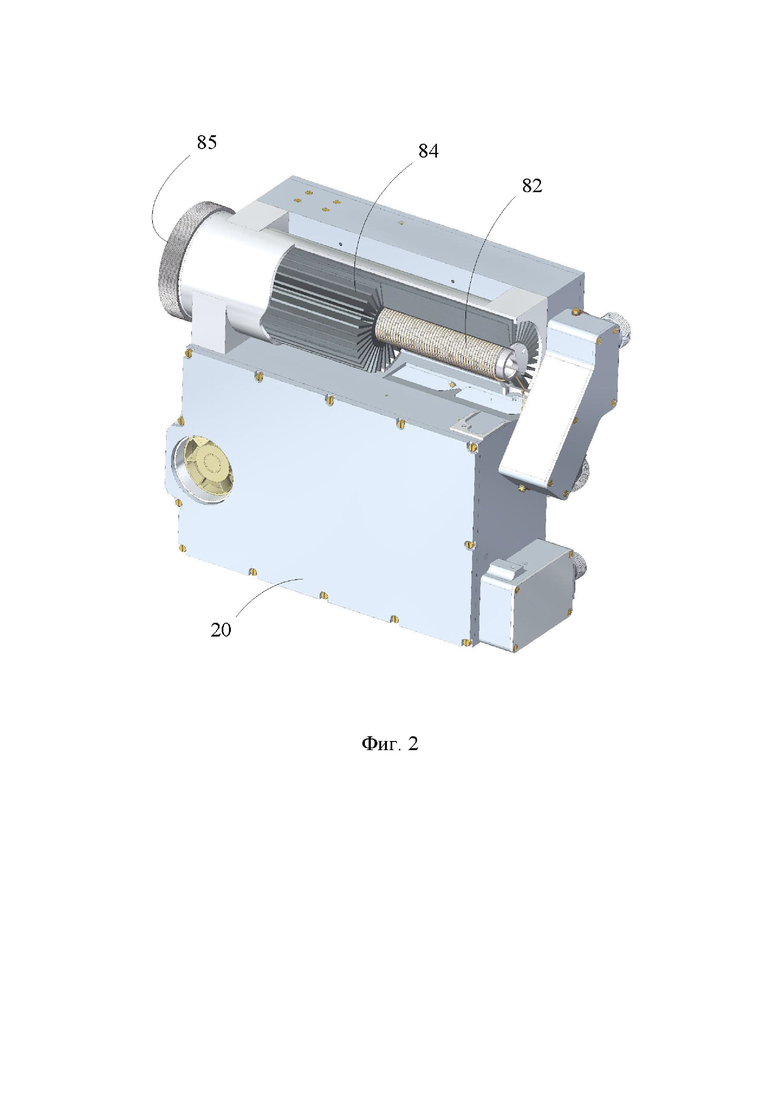
Фиг. 2 – вид второго корпуса предложенной лебедки сзади с разрезом, раскрывающим балластный резистор;
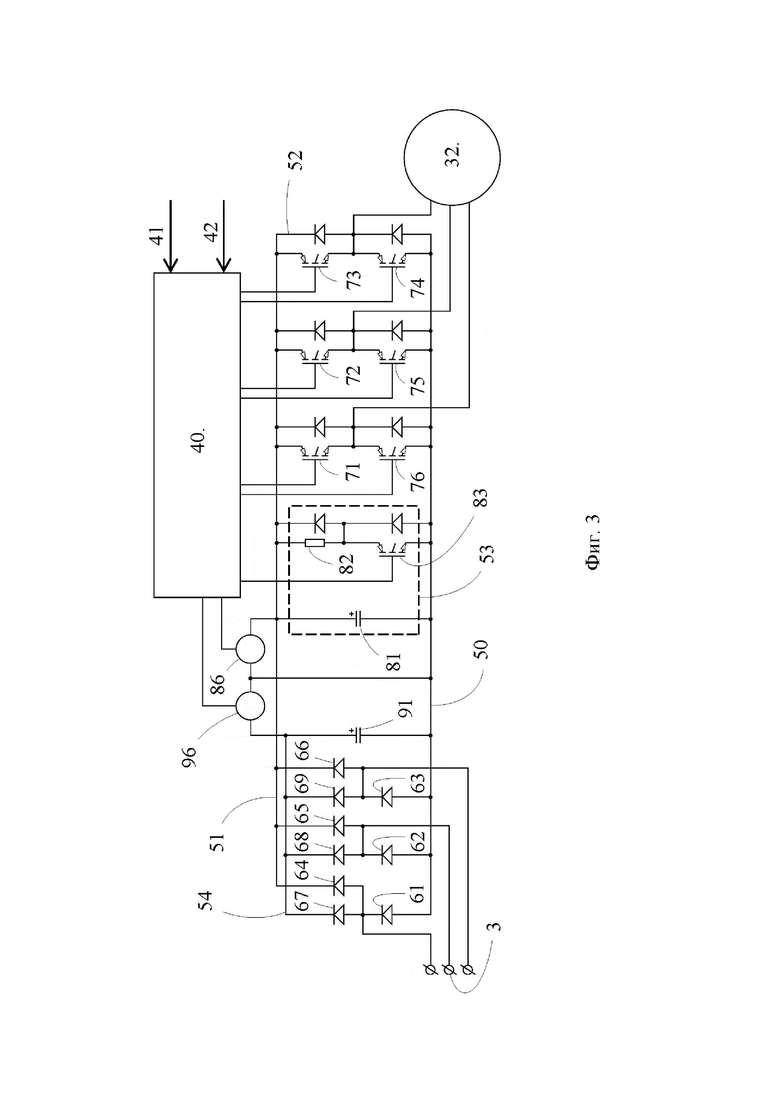
Фиг. 3 – электрическая схема предложенной лебедки;
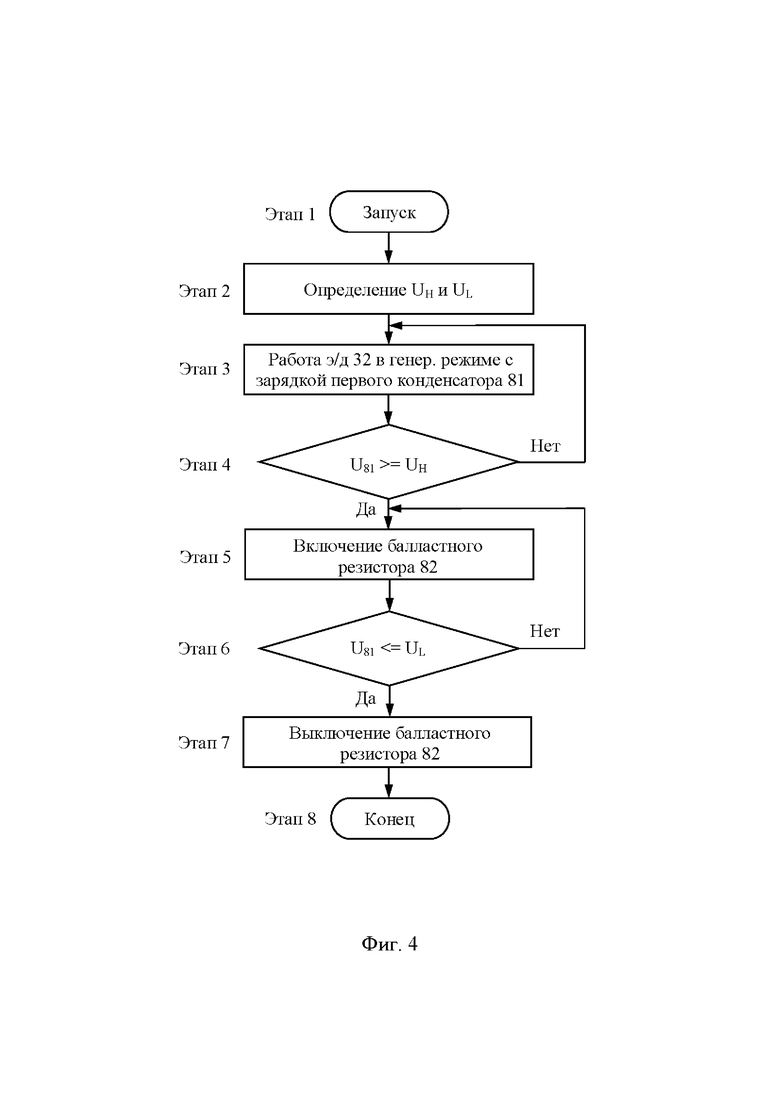
Фиг. 4 – блок-схема алгоритма управления силовым блоком при осуществлении заторможенного выпуска каната.
Осуществление изобретения
[18] Осуществление изобретения будет показано на наилучших известных авторам примерах реализации изобретения, которые не являются ограничениями в отношении объема охраняемых прав.
[19] На Фиг. 1 представлен общий вид лебедки 1, которая предназначена для установки на вертолете с тем, чтобы обеспечивать подъем и спуск груза при нахождении вертолета в воздухе. Лебедка 1 содержит прикрепленные друг к другу первый и второй корпуса 10 и 20. Первый корпус 10 образует отсеки 11 и 12, в которых размещены соответственно барабан 30 с намотанным на него канатом 31 и электродвигатель 32, способный работать в двигательном и генераторном режимах. Во втором корпусе 20 размещены блок 40 управления и силовой блок 50 (Фиг. 3).
[20] В качестве электродвигателя 32 использован синхронный электродвигатель с постоянными магнитами на роторе. Ротор электродвигателя 32 через редуктор (не показан) имеет силовую связь с барабаном 30, благодаря чему при работе в двигательном режиме электродвигатель 32 способен приводить барабан 30 во вращение для осуществления уборки или принудительного выпуска каната 31, а при работе в генераторном режиме – вырабатывать электроэнергию за счет энергии вращения барабана 30 для осуществления заторможенного выпуска каната 31. Далее, обмотка статора электродвигателя 32 через силовой блок 50 соединена с бортовой электросетью 3, которая представляет собой трехфазную сеть переменного тока.
[21] Силовой блок 50 (Фиг. 3) содержит первый выпрямитель 51, инвертор 52 и тормозной модуль 53. Первый выпрямитель 51 представляет собой мостовую схему, выполненную из диодов 61-66. На одной своей стороне первый выпрямитель 51 имеет три входа, через которые он соединен с бортовой электросетью 3, а на другой – два выхода, через которые первый выпрямитель 51 соединен с инвертором 52.
[22] Инвертор 52 представляет собой мостовую схему, выполненную из транзисторных ключей 71-76 (далее – транзисторы 71-76), снабженных шунтирующими диодами. На одной своей стороне инвертор 52 имеет два входа, которые соединены с выходами первого выпрямителя 51, и через которые инвертор 52 получает выпрямленное напряжение от выпрямителя 51. На другой своей стороне инвертор 52 имеет три выхода, соединенные с фазами обмотки статора электродвигателя 32.
[23] Блок 40 управления предназначен для управления электродвигателем 32 во исполнение команд, поступающих от пользовательского интерфейса по шине 41. В этих целях блок 40 управления выполнен с возможностью такого управления транзисторами 71-76, чтобы посредством их включения и выключения, чередующихся в соответствующем порядке, формировать на концах обмотки статора электродвигателя 32 трехфазное переменное напряжение, благодаря чему электродвигатель 32 способен работать в двигательном режиме и передавать крутящий момент на барабан 30. Кроме того, блок 40 управления может изменять порядок переключения транзисторов 71-76 так, чтобы работа электродвигателя 32 в двигательном режиме могла быть осуществлена с вращением ротора как в прямом, так и в обратном направлениях, которые соответствуют направлениям вращения барабана 30 на уборку и выпуск каната 31.
[24] Одновременно с этим посредством регулирования частоты переключения транзисторов 71-76 блок 40 управления может изменять частоту трехфазного переменного напряжения, подаваемого на обмотку статора электродвигателя 32, а вместе с ней и частоту вращения ротора. Таким образом, частота вращения барабана 30 может изменяться в заданных пределах как при уборке, так и при выпуске каната 31, что позволяет регулировать скорость подъема и спуска груза.
[25] Блок 40 управления способен также управлять скважностью включения транзисторов 71-76 с осуществлением широтно-импульсной модуляции трехфазного переменного напряжения, подаваемого на обмотку статора электродвигателя 32, что позволяет регулировать величину крутящего момента на роторе электродвигателя 32.
[26] Далее, блок 40 управления способен обеспечивать периодическое короткое соединение по меньшей мере двух фаз обмотки статора электродвигателя 32, например, путем включения по меньшей мере двух транзисторов из группы 74-76 и выключения транзисторов 71-73, что обеспечивает работу электродвигателя 32 в режиме электродинамического торможения. Данный режим работы электродвигателя 32 является объективно присущим работе инвертора 52 и понятен специалисту в данной области техники.
[27] Коме этого, блок 40 управления выполнен с возможностью получения информации, на основании которой блок 40 управления способен делать определение о необходимости выполнения контролируемого торможения барабана 30, т.е. перехода в процесс заторможенного выпуска каната 31. Данная информация, предаваемая по шине 42, может представлять собой величину крутящего момента, создаваемого на барабане 30 канатом 31 при осуществлении выпуска каната 31. Критерием для запуска процесса заторможенного выпуска каната 31 может являться превышение величиной крутящего момента заранее установленной пороговой величины.
[28] Обратим внимание на то, что в контексте настоящего изложения понятие «блок 40 управления» отражает прежде всего описанное здесь функциональное содержание обозначаемого им блока, при этом техническая реализация этого блока является очевидной для специалиста в данной области техники и может иметь различную конфигурацию. Например, блок 40 управления может быть выполнен в виде отдельного физически обособленного устройства или может быть выполнен без физического обособления в составе более сложного устройства. Одновременно с этим возможно исполнение, когда компоненты блока 40 управления могут быть распределены по разным устройствам.
[29] Тормозной модуль 53 обеспечивает утилизацию электроэнергии, производимой электродвигателем 32 при его работе в генераторном режиме, и тем самым - торможение барабана 30. С одной своей стороны тормозной модуль 53 соединен с выходами выпрямителя 51, а с другой своей стороны – со входами инвертора 52, или другими словами, тормозной модуль 53 соединен с инвертором 52 параллельно выпрямителю 51.
[30] Далее, тормозной модуль 53 содержит первый конденсатор 81, балластный резистор 82 и тормозной транзисторный ключ 83 (далее – тормозной транзистор 83), при этом первый конденсатор 81 имеет параллельное соединение с последовательно соединенными друг с другом балластным резистором 82 и тормозным транзистором 83. Тормозной транзистор 83 находится под управлением блока 40 управления, по сигналам которого тормозной транзистор 83 может быть переведен в включенное и выключенное состояния. В отношении первого конденсатора 81 следует отметить, что при работе электродвигателя 32 в двигательном режиме тормозной транзистор 83 остается выключенным, и первый конденсатор 81 выступает в роли буферного конденсатора для первого выпрямителя 51, обеспечивая емкостную фильтрацию выпрямленного напряжения.
[31] Балластный резистор 82 выполнен в виде спирального тепловыделяющего элемента, который в целях эффективного отвода тепла заключен в цилиндрический радиатор 84, охлаждаемый вентилятором 85 (Фиг. 2).
[32] Первое измерительное устройство 86 подключено параллельно первому конденсатору 81 и способно измерять напряжение U81 на первом конденсаторе 81, а также передавать результаты измерений в блок 40 управления. Следует отметить, что напряжение U81 зависит как от напряжения в бортовой сети 3, которое в виде выпрямленного напряжения подается на первый конденсатор 81 со стороны первого выпрямителя 51, так и от напряжения, потребляемого или отдаваемого инвертором 52.
[33] Силовой блок 50 (Фиг. 3) содержит второй выпрямитель 54, который представляет собой мостовую схему, выполненную из диодов 61-63 и 67-69, и является аналогичным первому выпрямителю 51. На одной своей стороне второй выпрямитель 54 имеет три входа, через которые он соединен с бортовой электросетью 3, а на другой – два выхода, через которые второй выпрямитель 54 соединен со вторым конденсатором 91. Второй конденсатор 91 выступает в роли буферного конденсатора для второго выпрямителя 54, обеспечивая емкостную фильтрацию выпрямленного напряжения.
[34] Второе измерительное устройство 96 подключено параллельно второму конденсатору 91 и способно измерять напряжение U91 на втором конденсаторе 91, а также передавать результаты измерений в блок 40 управления. Обратим внимание, что напряжение U91 зависит только от напряжения в бортовой сети 3, которое в виде выпрямленного напряжения подается на второй конденсатор 91 со стороны второго выпрямителя 54. Таким образом, второй выпрямитель 54 вкупе со вторым измерительным устройством 96 предназначены для измерения напряжения в бортовой сети 3 после его выпрямления, что позволяет судить о величине выпрямленного напряжения, поступающего на первый конденсатор 81 со стороны первого выпрямителя 51.
[35] Здесь следует отметить, что выпрямленное напряжение на выходе первого и второго выпрямителей 51 и 54 отличается от постоянного напряжения и, сохраняя неизменную полярность, колеблется между своими максимальным и минимальным величинами. Блок 40 управления способен определять максимальное напряжение на выходе первого выпрямителя 51, принимая его равным максимальной величине напряжения U91, определенной за один период колебания напряжения U91.
[36] На Фиг. 4 представлен алгоритм управления силовым блоком 50, выполняемый блоком 40 управления при осуществлении заторможенного выпуска каната 31 (далее – Алгоритм). Алгоритм с Фиг. 4 представляет собой функционально обособленный фрагмент полного процесса работы блока 40 управления при осуществлении заторможенного выпуска каната 31, при этом указанный полный процесс включает в себя множество повторений Алгоритма, выполняемых незамедлительно друг за другом. Другими словами, на следующем повторении Алгоритма Этап 1 «Запуск» выполняется сразу после выполнения Этапа 8 «Конец» предыдущего повторения Алгоритма.
[37] Исходным условием для запуска Алгоритма является наступление следующих событий:
- блок 40 управления по шине 41 получает команду от пользовательского интерфейса на осуществление выпуска каната 31;
- блок 40 управления на основании информации, полученной по шине 42, определяет необходимость выполнения заторможенного выпуска каната 31.
На Этапе 1 блок 40 управления выполняет проверку факта наступления указанных событий и при подтверждении такового запускает Алгоритм.
[38] На Этапе 2 блок 40 управления определяет первую UH и вторую UL пороговые величины для напряжения на первом конденсаторе 81. Для этого блок 40 управления получает максимальное напряжение на выходе первого выпрямителя 51, в качестве которого принимает максимальную величину напряжения U91 за один период его колебаний, а затем определяет вторую пороговую величину UL путем прибавления к максимальной величине напряжения U91 фиксированной добавки ΔU1, и определяет первую пороговую величину UH путем прибавления ко второй пороговой величине UL фиксированной добавки ΔU2.
[39] На Этапе 3 блок 40 управления переводит электродвигатель 32 в генераторный режим, для чего при вращающемся роторе электродвигателя 32 блок 40 управления запускает такое управление транзисторами 71-76, чтобы возникающая в обмотке статора электродвигателя противо-ЭДС складывалась с ЭДС, производимой бортовой сетью 3. По существу, для выполнения указанного управления транзисторами 71-76 блок 40 управления включает транзисторы 71-76 в той последовательности, которая аналогична последовательности их включения при работе электродвигателя 32 на уборку каната. Поскольку суммарная ЭДС в контуре силового блока 50 превосходит ЭДС бортовой сети 3, то напряжение U81 на первом конденсаторе 81 быстро становится выше суммы максимального напряжения на выходе первого выпрямителя 51 и падения напряжения на паре диодов первого выпрямителя 51, в результате чего диоды 64-66 первого выпрямителя 51 закрываются, и соединение с бортовой сетью 3 оказывается прерванным.
[40] Тем не менее, первый конденсатор 81 продолжает заряжаться потребляя мощность, производимую вращающимся ротором электродвигателя 32, и тем самым вызывая торможение связанного с ротором барабана 30.
[41] На Этапе 4 блок 40 управления сравнивает текущее напряжение U81 с первой пороговой величиной UH, и если напряжение U81 оказывается меньше первой пороговой величиной UH, то Алгоритм возвращается к Этапу 3. Зарядка конденсатора 81 при этом не останавливается, и напряжение U81 продолжает возрастать.
[42] Если же на Этапе 4 блок 40 управления определяет, что напряжение U81 достигло первой пороговой величиной UH или превысило ее, то Алгоритм переходит на Этап 5, на котором блок 40 управления включает тормозной транзистор 83, после чего первый конденсатор 81 разряжается через балластный резистор 82. В результате нагрева балластного резистора 82 и последующего рассеивания тепла, производится утилизация энергии, вырабатываемой вращающимся ротором электродвигателя 32, что приводит к его торможению.
[43] На Этапе 6 блок 40 управления сравнивает текущее напряжение U81 со второй пороговой величиной UL, и если напряжение U81 оказывается больше второй пороговой величиной UL, то Алгоритм возвращается к Этапу 5. Разрядка конденсатора 81 при этом не останавливается, и напряжение U81 продолжает снижаться.
[44] Если же на Этапе 6 блок 40 управления определяет, что напряжение U81 достигло второй пороговой величиной UL или стало еще ниже, то Алгоритм переходит на Этап 7, на котором блок 40 управления выключает тормозной транзистор 83, и первый конденсатор 81 начинает заряжаться вновь.
[45] Далее Алгоритм переходит к завершающему Этапу 7, который по существу является этапом, инициирующим выполнение Этапа 1 следующего цикла.
[46] Таким образом, при любых частотах вращения ротора электродвигателя 32, а значит и барабана 30, напряжение, подаваемое на балластный резистор 82, заключено в коридоре между первой и второй пороговыми величинами UH и UL, которые подобраны так, чтобы обеспечить оптимальные условия для работы балластного резистора 82. В частности, соответствующим коридором ограничивается сила тока, протекающего в контуре силового блока 50, при этом ограничение силы тока сверху исключает риск перегрева с последующим выходом из строя как самого балластного резистора 82, так и транзисторов 71-76. В свою очередь, ограничение силы тока снизу обеспечивает требуемый нагрев балластного резистора 82, а значит и эффективное торможение барабана 30, даже на низких частотах его вращения. Соответственно, заторможенный выпуск каната 31 может быть произведен с разными скоростями движения каната 31, что позволяет управлять скоростью спуска груза.
[47] Следует также отметить, что при любом изменении напряжения в бортовой сети 3 вторая пороговая величина UL всегда остается выше максимального напряжения на выходе первого выпрямителя 51. Благодаря этому при осуществлении торможения барабана 30 диоды 64-66 первого выпрямителя 51 поддерживаются в закрытом состоянии, и соединение первого конденсатора 81, а также балластного резистора 82 с бортовой сетью 3 отсутствует. Данное решение позволяет отказаться от введения в силовой блок 50 дополнительных ключей, предназначенных для прерывания соединения бортовой сети 3 с тормозным модулем 53, и тем самым упростить конструкцию силового блока 50.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ АВАРИЙНЫХ РЕЖИМОВ РАБОТЫ | 2004 |
|
RU2286638C2 |
| Электрическая передача тепловоза | 2017 |
|
RU2656749C1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2014 |
|
RU2584002C1 |
| Мостовой преобразователь напряжения | 1984 |
|
SU1182609A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Устройство для защиты электродвигателя переменного тока от перегрузки | 1985 |
|
SU1319147A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1966 |
|
SU179684A1 |
| УСТРОЙСТВО ДЛЯ ПОГЛОЩЕНИЯ ЭНЕРГИИ ТОРМОЖЕНИЯ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2019 |
|
RU2715821C1 |
| ЭЛЕКТРОННЫЙ КОРРЕКТОР СИСТЕМЫ ЗАЖИГАНИЯ | 1996 |
|
RU2171393C2 |
| Устройство для защиты трехфазного асинхронного электродвигателя от аварийного режима | 1985 |
|
SU1377955A1 |
Изобретение относится к подвесным механизмам. Лебедка содержит барабан с намотанным тросом, синхронный электродвигатель, связанный с барабаном и способный при выпуске троса работать в двигательном и генераторном режиме, а также блок управления. Электродвигатель соединен с трехфазной сетью переменного тока через выпрямитель, выполненный на основе мостовой диодной схемы. К инвертору присоединен тормозной модуль. Тормозной модуль содержит конденсатор, балластный резистор и транзисторный ключ. Конденсатор имеет параллельное соединение с последовательно соединенными друг с другом балластным резистором и транзисторным ключом. При работе электродвигателя в генераторном режиме, блок управления замыкает транзисторный ключ, когда напряжение на конденсаторе повышается до первой пороговой величины и размыкает ключ, когда напряжение на конденсаторе снижается до второй пороговой величины. Вторая величина меньше первой величины, но выше максимального напряжения на выходе выпрямителя. Расширяется диапазон скоростей спуска. 2 з.п. ф-лы, 4 ил.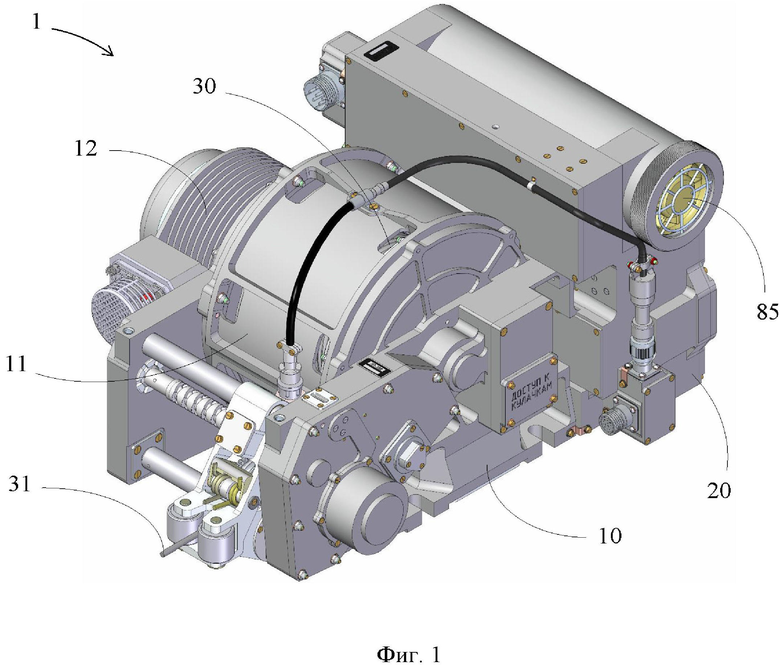
1. Лебедка, содержащая барабан, на который намотан трос, синхронный электродвигатель, имеющий силовую связь с барабаном и способный при выпуске троса работать в двигательном и генераторном режиме, а также блок управления, при этом
электродвигатель соединен с трехфазной сетью переменного тока через выпрямитель, выполненный на основе мостовой диодной схемы, и инвертор, к которому параллельно с выпрямителем присоединен тормозной модуль, причем
тормозной модуль содержит конденсатор, балластный резистор и транзисторный ключ, при этом конденсатор имеет параллельное соединение с последовательно соединенными друг с другом балластным резистором и транзисторным ключом, при этом
во время работы электродвигателя в генераторном режиме блок управления способен замыкать транзисторный ключ, когда напряжение на конденсаторе повышается до первой пороговой величины, и размыкать транзисторный ключ, когда напряжение на конденсаторе снижается до второй пороговой величины, которая меньше первой пороговой величины, но выше максимального напряжения на выходе выпрямителя.
2. Лебедка по п. 1, в которой указанный выпрямитель является первым выпрямителем, а указанный конденсатор является первым конденсатором, при этом лебедка содержит второй выпрямитель и второй конденсатор, причем
второй выпрямитель соединен с указанной трехфазной сетью переменного тока и предназначен для получения выпрямленного напряжения с целью его измерения, при этом второй выпрямитель выполнен на основе мостовой диодной схемы, а второй конденсатор соединен параллельно со вторым выпрямителем, причем
блок управления способен изменять первую и вторую пороговые величины так, чтобы разность между второй пороговой величиной и максимальным напряжением на втором конденсаторе, а также разность между первой и второй пороговыми величинами сохранялись неизменными.
3. Лебедка по п. 1, которая предназначена для использования на вертолете, бортовая электросеть которого получает питание исключительно от штатных источников напряжения.
| US 2020309216 A1, 01.10.2020 | |||
| РЕВЕРСНЫЙ ЭЛЕКТРОПРИВОД ЛЕБЕДКИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1995 |
|
RU2115217C1 |
| US 4902954 A, 20.02.1990 | |||
| Реверсивный электропривод | 1971 |
|
SU598203A1 |

