Область техники, к которой относится изобретение.
Изобретение относится к испытательной технике, а именно, к динамическим наземным копровым методам испытаний (далее - испытания) объектов на эксплуатационные или иные заданные нагрузки при имитации приземления на парашютно-десантной (преимущественно, бесплатформенной) системе с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками, на сушу и на воду.
Изобретение может быть использовано для наземных копровых испытаний и исследований функционирования объектов после приземления, в том числе, объектов боевой и специальной военной техники (БСВТ): бронетранспортеров (БТР), самоходных артиллерийских орудий (САО), боевых машин десанта (БМД) и других - с грузом или манекенами, или испытателями - на универсальных сиденьях (креслах) внутри.
Изобретение может использоваться также для наземной проверки прочности и работоспособности различных объектов, приборов и агрегатов парашютно-десантной, и иной техники.
Испытания проводятся на стенде-копре свободного падения.
В качестве объекта испытаний может использоваться, например, объект БСВТ, например, гусеничная БМД или ее габаритно-массовый макет (ГММ).
Раскрытие изобретения.
В основу настоящего изобретения поставлена задача создания способа копровых испытаний объекта на парашютно-десантной (преимущественно, бесплатформенной) системе с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками, в том числе, с методиками расчетов параметров сбросов на стенде-копре (высота сбросов, скорость снижения и др.), обеспечивающих их максимальное сближение при испытаниях на стенде-копре с заданными параметрами при парашютном приземлении объекта, с получением объективных результатов.
Технический результат заключается в создании способа копровых испытаний различных объектов на парашютно-десантных (преимущественно, бесплатформенных) системах с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками, для наземных копровых испытаний и исследований функционирования объектов (включая пневмоамортизаторы), в том числе, объектов с грузами или манекенами, или испытателями на универсальных сиденьях внутри объекта. Предлагаемый способ испытаний (имитация парашютного приземления) максимально приближен к заданным условиям парашютного приземления, и позволяет реализовать получение объективных результатов.
Цель копровых испытаний: определение соответствия изготовленных объектов требованиям технической документации, техническим условиям (ТУ) или Тактико-техническому заданию (ТТЗ), значительное сокращение сроков постановки их на производство и снижение трудозатрат на последующих этапах и видах испытаний, например, летных или натурных испытаний, в которых используется дорогостоящая техника, высококвалифицированные специалисты, оборудование и материалы.
Также цель настоящего изобретения, в том числе: реализация получения объективных результатов.
Также, в случае проведения копровых испытаний при имитации условий парашютного приземления проводят определение фактических характеристик пневмоамортизаторов и, при необходимости, доводку их до заданных ТУ или ТТЗ, и т.д.
По результатам технических копровых испытаний (без испытателей) принимается решение о проведении физиологических сбрасываний, с испытателями на универсальных сиденьях внутри объекта (машины), в случае заданного проведения физиологических копровых испытаний.
Так, например, при копровых испытаниях объекта - гусеничной БМД (далее - машина) с размещенной на ней парашютно-десантной бесплатформенной системой с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками, проводят определение внутреннего давления в оболочках пневмоамортизаторов до и после имитации приземления, определение ударных перегрузок на корпусе машины, время их действия и других заданных характеристик, действующих на корпусе машины и на универсальных сиденьях, в том числе, с размещенными на них манекенами или испытателями, или грузами (например, в виде мешков с песком или дробью массой 100 кг).
Поставленная задача достигается тем, что в заявляемом способе копровых испытаний объекта осуществляют его подъем на подвесной системе стенда-копра с замком отцепа, с размещенными на нем парашютно-десантной системой, включающей лыжи с пневмоамортизаторами принудительного наполнения с воздуховодами с распущенными мягкими замкнутыми оболочками, нагнетательным устройством с заслонками, соединенным с воздуховодами, и средствами измерения и записи физических величин на объекте и на оболочках, на высоту, обеспечивающую заданную скорость приземления, определяемую по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности средств десантирования, м,
Vy - вертикальная скорость приземления объекта в момент касания пневмоамортизаторами площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
hA - высота наполненного воздухом пневмоамортизатора, м.
Запуском нагнетательного устройства наполняют оболочки воздухом до заданного избыточного давления, закрывают заслонки, срабатыванием замка отцепа выполняют сбрасывание объекта на заданную площадку приземления стенда-копра (суша: специальный грунт, бетонированная площадка; вода).
Способ имеет следующие частные случаи исполнения.
Номинальную вертикальную скорость приземления объекта определяют по формуле:
где  - максимальная полетная масса объекта системы «груз-парашют», кг,
- максимальная полетная масса объекта системы «груз-парашют», кг,
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
сn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с.
Максимальную вертикальную скорость приземления объекта определяют по формуле:
где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент.
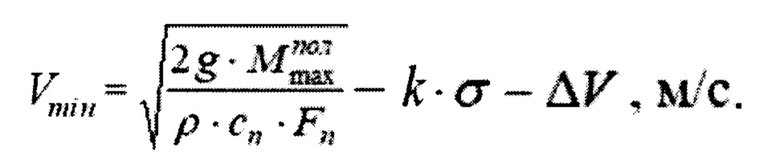
Минимальную вертикальную скорость приземления объекта определяют по формуле:
Углы крена и тангажа создают за счет изменения длины ветвей подвесной системы стенда-копра.
Имитацию горизонтальной скорости приземления обеспечивают оттягиванием объекта на заданный угол.
При сбрасывании с углом крена высоту подъема измеряют от середины отрезка линии, соединяющей нижние поверхности лыж.
При сбрасывании с углом тангажа высоту подъема измеряют от середины лыж.
Краткое описание чертежей.
Изобретение поясняется фигурами, которые не охватывают и, тем более, не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами варианта частного случая способа копровых испытаний объекта - гусеничной БМД на парашютно-десантной бесплатформенной системе с пневмоамортизаторами принудительного наполнения, с манекенами на универсальных сиденьях, сбросы на сушу (на бетонированную площадку).
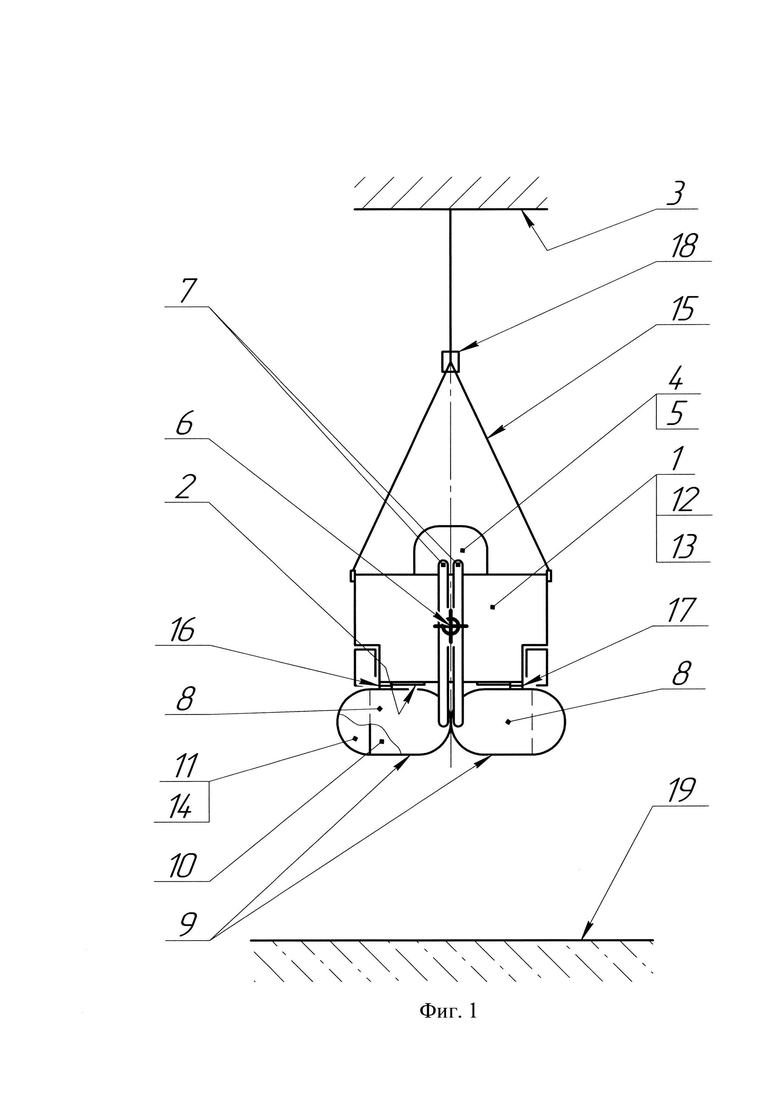
Фиг. 1 отображает схему стенда-копра с подвешенной на нем машиной, корпус которой и универсальные сиденья оснащены датчиками перегрузок. На машине размещена парашютно-десантная бесплатформенная система с двумя пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками, и воздухонагнетательное устройство, подготовленные к сбросу на стенде-копре, вид сзади на корму машины.
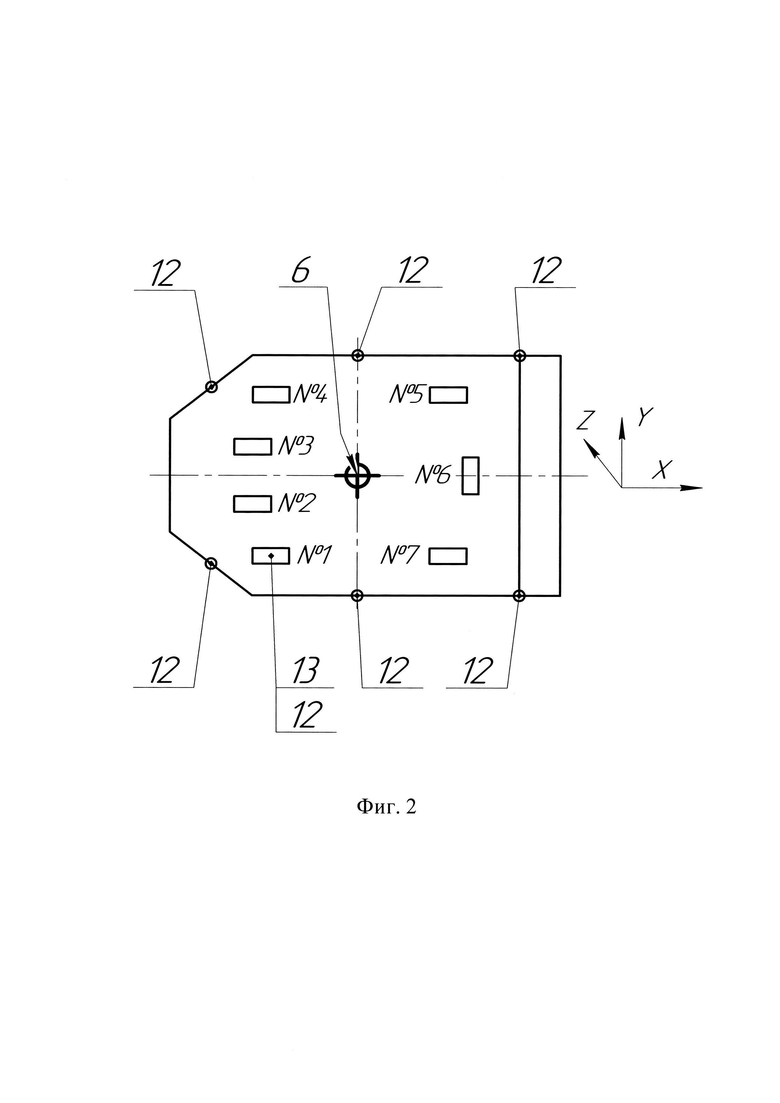
Фиг. 2 отображает схему размещения датчиков перегрузок на корпусе машины и на универсальных сиденьях №1…№7 с манекенами (манекены не показаны), вид сверху, X, Y, Z - ориентация осей датчиков перегрузок.
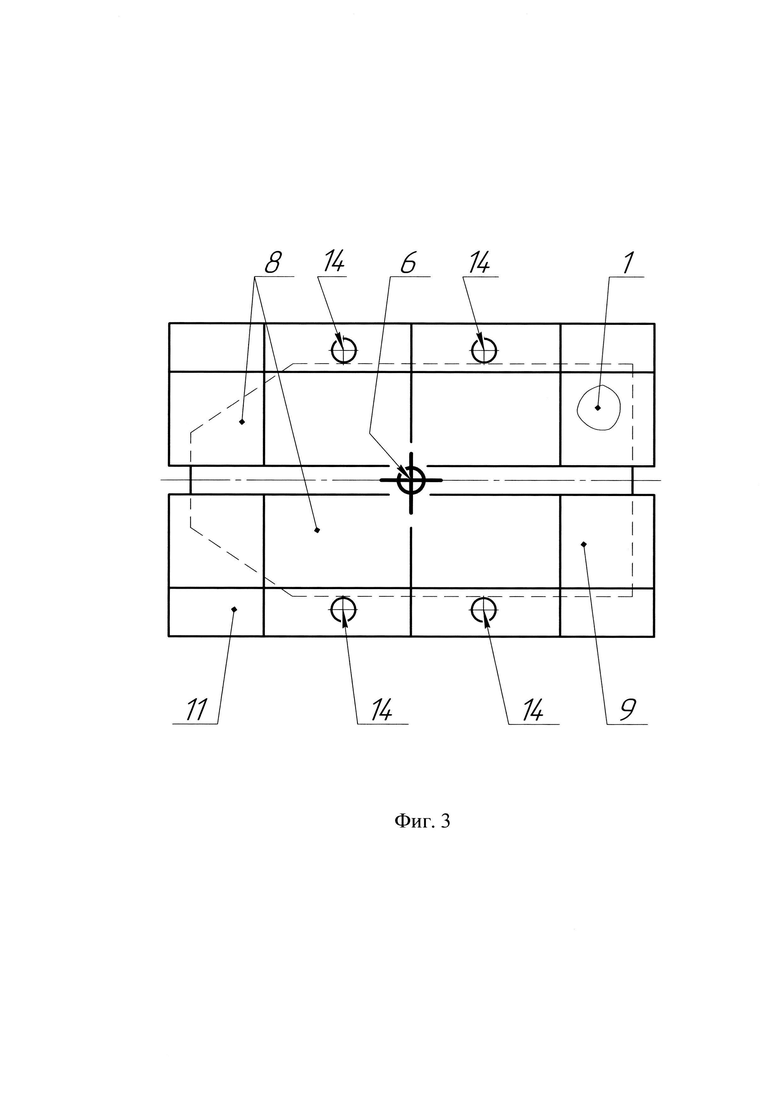
Фиг. 3 отображает схему размещения датчиков давления внутри дополнительных камер пневмоамортизаторов в районе клапанов выпуска воздуха (клапаны не показаны), вид сверху.
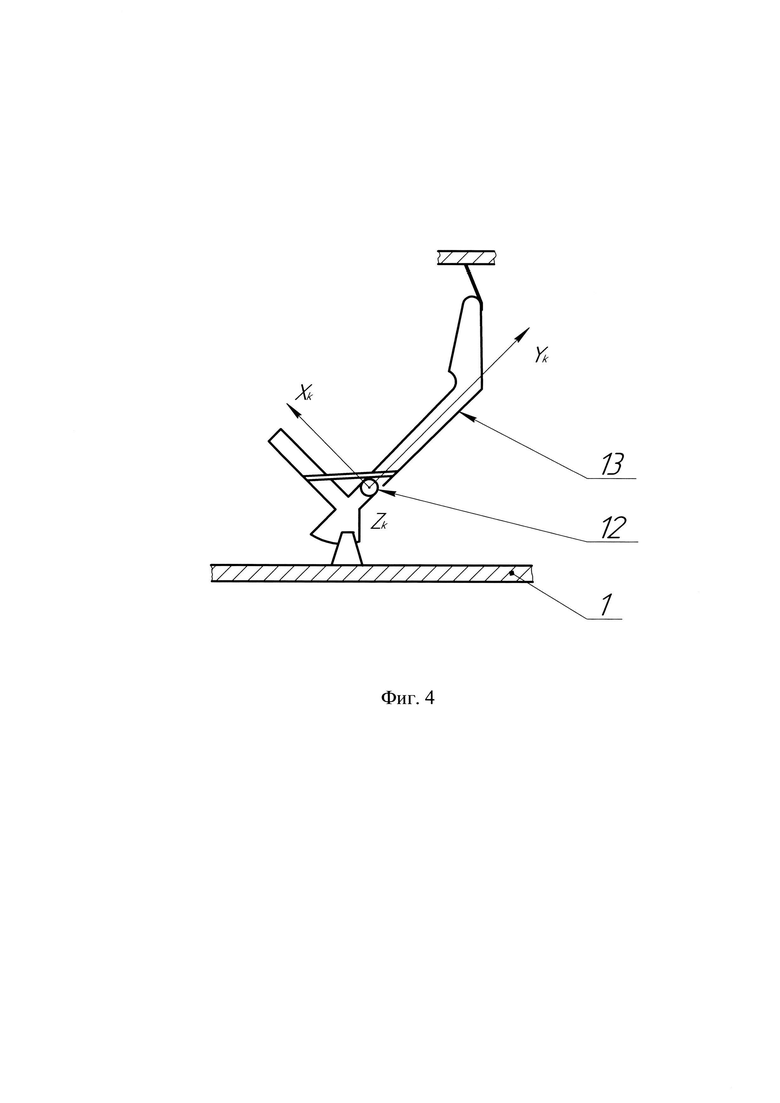
Фиг. 4 отображает универсальное сиденье с датчиком перегрузок, установленного внутри машины на кронштейны на полу и на потолке, в положение при десантировании (манекен не показан), вид сбоку, Xk, Yk, Zk - ориентация осей датчика перегрузок.
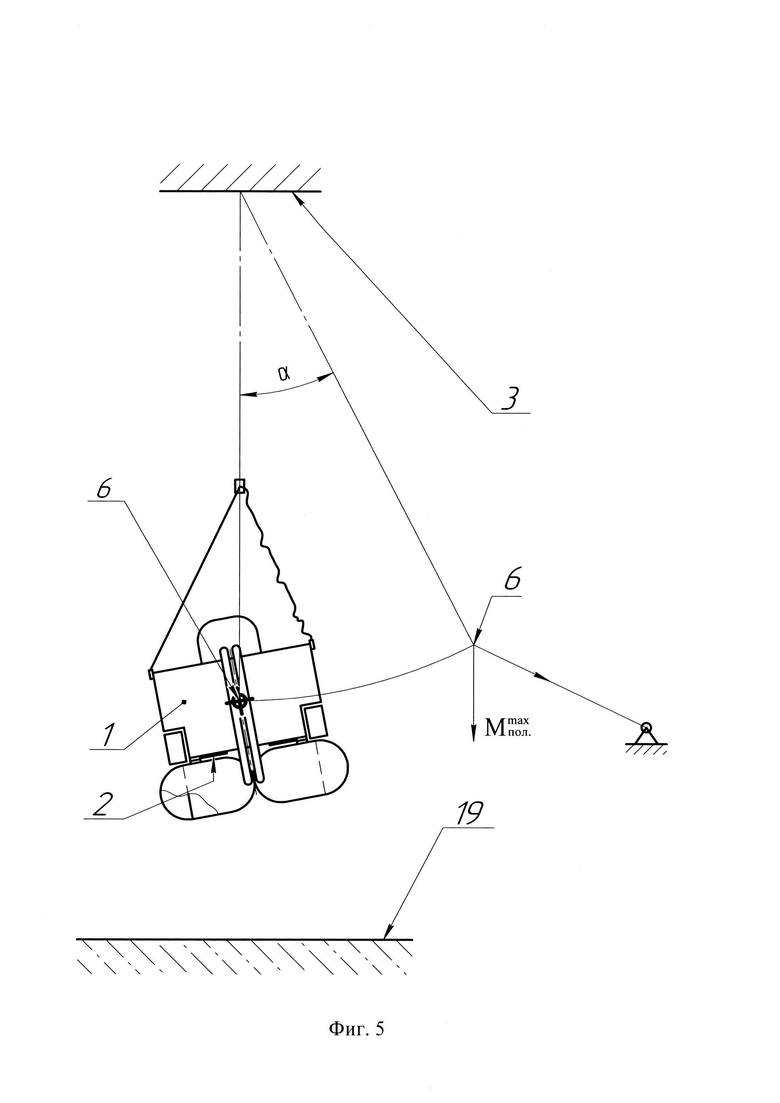
Фиг. 5 отображает схему имитации горизонтальной скорости приземления машины, вид сзади на корму машины.
Осуществление изобретения.
Способ копровых испытаний заключается в следующем.
Подготовка и выполнение копрового сбрасывания.
Размещают на машине 1 парашютно-десантную бесплатформенную систему 2 (в комплектации средств десантирования для копрового сбрасывания) (фиг. 1).
Определяют массу машины 1 с парашютно-десантной бесплатформенной системой 2 (в комплектации средств десантирования для копрового сбрасывания), подготовленных к копровому сбрасыванию, взвешиванием на стенде-копре 3 с использованием, например, крановых подвесных весов СВК-20000Д.
Устанавливают сверху на корпусе машины 1 воздухонагнетательное устройство 4 с заслонками 5.
Определяют положение общего центра масс 6.
Подсоединяют воздуховоды 7 пневмоамортизаторов 8 с мягкими замкнутыми оболочками 9, состоящими из основной 10 и дополнительной 11 камер, к воздухонагнетательному устройству 4 (фиг. 1).
Распускают и подготавливают пневмоамортизаторы 8 для наполнения их воздухом.
Размещают датчики перегрузок 12 по правому и левому бортам на корпусе машины 1 (фиг. 2) и на универсальных сиденьях 13 (фиг. 4). Датчики перегрузок 12 могут быть размещены также непосредственно на манекенах (на фигурах не показаны).
Приподнимают машину 1 с парашютно-десантной бесплатформенной системой 2 на стенде-копре 3, и ставят, например, на четыре подставки (из состава стенда-копра 3) с упором их в днище машины 1.
Устанавливают датчики 14 (фиг. 3) измерения давления внутри дополнительных камер 11 пневмоамортизаторов 8 в районе клапанов выпуска воздуха (на фигурах не показаны).
Размещают на машине 1 другие необходимые средства десантирования из комплектации для копрового сбрасывания (на фигурах не показаны).
Определяют высоту, обеспечивающую заданную скорость приземления, по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности средств десантирования, м,
Vy - вертикальная скорость приземления объекта в момент касания пневмоамортизаторами площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
hA - высота наполненного воздухом пневмоамортизатора, м.
Определяют номинальную вертикальную скорость приземления машины 1 по формуле:
где  - максимальная полетная масса объекта (машины 1) системы «груз-парашют», кг,
- максимальная полетная масса объекта (машины 1) системы «груз-парашют», кг,
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
сn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с.
Определяют максимальную вертикальную скорость приземления объекта (машины 1) по формуле:
где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент.
Определяют минимальную вертикальную скорость приземления объекта (машины 1) по формуле:
Создают углы крена и тангажа за счет изменения длины ветвей подвесной системы 15 стенда-копра 3.
Обеспечивают имитацию горизонтальной скорости приземления оттягиванием машины 1 с парашютно-десантной бесплатформенной системой 2 на заданный угол «α» (фиг. 5).
Измеряют высоту подъема при сбрасывании с углом крена от середины отрезка линии, соединяющей нижние поверхности левой 16 и правой 17 лыж.
Измеряют высоту подъема при сбрасывании с углом тангажа от середины лыж 16 или 17.
Закрепляют замок отцепа 18 на крюке стенда-копра 3, устанавливают на него звенья подвесной системы 15 стенда-копра 3. Подготавливают замок отцепа 18 к работе.
Поднимают машину 1 с парашютно-десантной бесплатформенной системой 2 на заданную высоту «Н», рассчитанную по вышеизложенной формуле, убирают подставки.
Наполняют пневмоамортизаторы 8 воздухом до заданного избыточного давления воздухонагнетательным устройством 4 в соответствии с ТУ и, не выключая его, поддерживают давление в амортизаторах 8 на заданном уровне.
Закрывают заслонки 5.
Для достижения заданного уровня избыточного давления внутри оболочек 9 пневмоамортизаторов 8 используют заслонки 5 с возможностью регулировки или перекрытия (закрытие заслонок 5) потока, и средство измерений, например, в виде измерительного прибора, например, «Напоромер НМП-52-М3» (на фигурах не показан) с пределом измерения, например, 1,6 кПа, устанавливаемый, например, на один из пневмоамортизаторов 8. Могут быть установлены также средства записи избыточного давления в оболочках 9 до сброса, в процессе сброса и при приземлении машины 1.
Включают измерительную аппаратуру - средство измерений и записи перегрузок на корпусе машины 1 и на универсальных сиденьях 13 при испытаниях (аппаратура на фигурах не показана). При приземлении используют, например, следующее средство измерений и записи перегрузок по трем осям: «Flash-Recorder-3 М3», вибропреобразователи «АР2038Р-100», с пределом измерения, например, 50 единиц.
Для видео- и фотофиксации процесса приземления (срабатывание системы сброса, процесс обжатия пневмоамортизаторов и др.) и внешнего вида машины 1 с парашютно-десантной бесплатформенной системой 2 до и после копровых испытаний используют видеокамеры, например, «Canon HF G30».
При этом видеокамеры (на фигурах не показаны) должны быть установлены на специальных стойках и на таком расстоянии, при котором машина 1 с парашютно-десантной бесплатформенной системой 2 и оболочки 9 пневмоамортизаторов 8 постоянно находились бы в кадре в процессе сбрасывания и при приземлении.
Выполняют сбрасывание машины 1 с парашютно-десантной бесплатформенной системой 2 на заданную бетонированную площадку приземления 19 стенда-копра 3 срабатыванием замка отцепа 18.
Выполняют заданное количество копровых сбросов (экспериментов) с различными заданными параметрами (в том числе, в разных сочетаниях параметров, включая сбросы с максимально предельными, возможными «худшими» случаями парашютного приземления, заданными ТУ или ТТЗ), например:
- вертикальная скорость приземления (минимальная, номинальная, максимальная);
- горизонтальная скорость приземления (максимальная);
- угол тангажа (на нос или на корму машины 1, максимальный);
- угол крена (на правый борт или на левый борт машины 1, максимальный);
- высота сбрасывания (расчетная);
- площадка приземления (суша: специальный грунт, бетонированная площадка; вода), а также иные заданные параметры сбросов.
Выполняют технические сбросы для назначения и подготовки к последующему проведению физиологических сбросов с испытателями на универсальных сиденьях 13 внутри машины 1, в случае назначения, например, проведения последующих копровых физиологических испытаний.
Оценка результатов копровых сбросов (экспериментов).
Оценивают ударные перегрузки и другие заданные характеристики, действующие на корпусе машины 1 и на универсальных сиденьях 13, например, сравнивая их с требованиями ТУ или ТТЗ, после каждого копрового сброса (эксперимента).
Проверяют функционирование систем и оборудования машины 1.
Определяют работоспособность пневмоамортизаторов 8 и их устойчивость к воздействию ударных перегрузок при приземлении машины 1 на парашютно-десантной бесплатформенной системе 2, например, сравнивания соответствие результатов копровых сбрасываний требованиям ТУ или ТТЗ, в том числе - например, сравнивания давление срабатывания выпускных клапанов воздуха при приземлении с заданными значениями, после каждого копрового сброса (эксперимента).
Контролируют состояние и целостность оболочек 9, камер 10 и 11, воздуховодов 7 и выпускных клапанов воздуха после каждого копрового сброса (эксперимента).
Выдают рекомендации (совместно с профильными медицинскими специалистами) к проведению последующих видов и этапов испытаний, например, физиологических, летных и других.
Использование изобретения по назначению и утилизация его материальной части не наносят вреда окружающей среде и человеку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ копровых испытаний объекта на парашютно-бесплатформенной системе с самонаполняющимися пневмоамортизаторами | 2024 |
|
RU2829618C1 |
| Энергоёмкий пневмоамортизатор для десантирования грузов (варианты) | 2020 |
|
RU2753782C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2019 |
|
RU2722828C1 |
| Парашютно-десантное амортизационное устройство со средством ориентации объекта продольной осью по потоку | 2024 |
|
RU2825911C1 |
| Парашютная платформа | 2021 |
|
RU2763204C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ДЕСАНТИРОВАНИЯ ГРУЗОВ | 2007 |
|
RU2349509C1 |
| Устройство бесплатформенного парашютного десантирования грузов из летательных аппаратов | 2021 |
|
RU2764814C1 |
| СПОСОБ ОТДЕЛЕНИЯ ГРУЗА ОТ ПАРАШЮТНОЙ СИСТЕМЫ | 2019 |
|
RU2745508C2 |
| ПАРАШЮТНАЯ ПЛАТФОРМА | 2019 |
|
RU2734152C1 |
| Парашютно-десантная платформа | 2021 |
|
RU2764475C1 |
Изобретение относится к испытательной технике, к динамическим наземным копровым методам испытаний объектов на парашютно-десантных (преимущественно, бесплатформенных) системах с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками на эксплуатационные или иные заданные нагрузки при имитации приземления на парашюте, на сушу и на воду. Сущность: осуществляют подъем объекта на подвесной системе стенда-копра с замком отцепа с размещенными на нем парашютно-десантной системой, включающей лыжи с пневмоамортизаторами принудительного наполнения с воздуховодами с распущенными мягкими замкнутыми оболочками, нагнетательным устройством с заслонками, соединенным с воздуховодами, и средствами измерения и записи физических величин на объекте и на оболочках на высоту, обеспечивающую заданную скорость приземления, определяемую по формуле: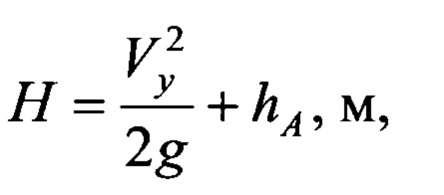 где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности средств десантирования, м, Vy - вертикальная скорость приземления объекта в момент касания амортизатором площадки приземления, м/с, g - ускорение свободного падения, g=9,81 м/с2, hA - высота наполненного воздухом пневмоамортизатора, м. Запуском нагнетательного устройства наполняют мягкие замкнутые оболочки воздухом до заданного избыточного давления, закрывают заслонки, срабатыванием замка отцепа выполняют сбрасывание объекта на заданную площадку приземления стенда-копра. Технический результат: создание способа копровых испытаний различных объектов на парашютно-десантных системах с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками для наземных копровых испытаний и исследований функционирования объектов (включая пневмоамортизаторы), в том числе с грузами, или манекенами, или испытателями на универсальных сиденьях внутри объекта, максимально приближенного к фактическим заданным условиям приземления и позволяющего реализовать получение объективных результатов. 7 з.п. ф-лы, 5 ил.
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности средств десантирования, м, Vy - вертикальная скорость приземления объекта в момент касания амортизатором площадки приземления, м/с, g - ускорение свободного падения, g=9,81 м/с2, hA - высота наполненного воздухом пневмоамортизатора, м. Запуском нагнетательного устройства наполняют мягкие замкнутые оболочки воздухом до заданного избыточного давления, закрывают заслонки, срабатыванием замка отцепа выполняют сбрасывание объекта на заданную площадку приземления стенда-копра. Технический результат: создание способа копровых испытаний различных объектов на парашютно-десантных системах с пневмоамортизаторами принудительного наполнения с мягкими замкнутыми оболочками для наземных копровых испытаний и исследований функционирования объектов (включая пневмоамортизаторы), в том числе с грузами, или манекенами, или испытателями на универсальных сиденьях внутри объекта, максимально приближенного к фактическим заданным условиям приземления и позволяющего реализовать получение объективных результатов. 7 з.п. ф-лы, 5 ил.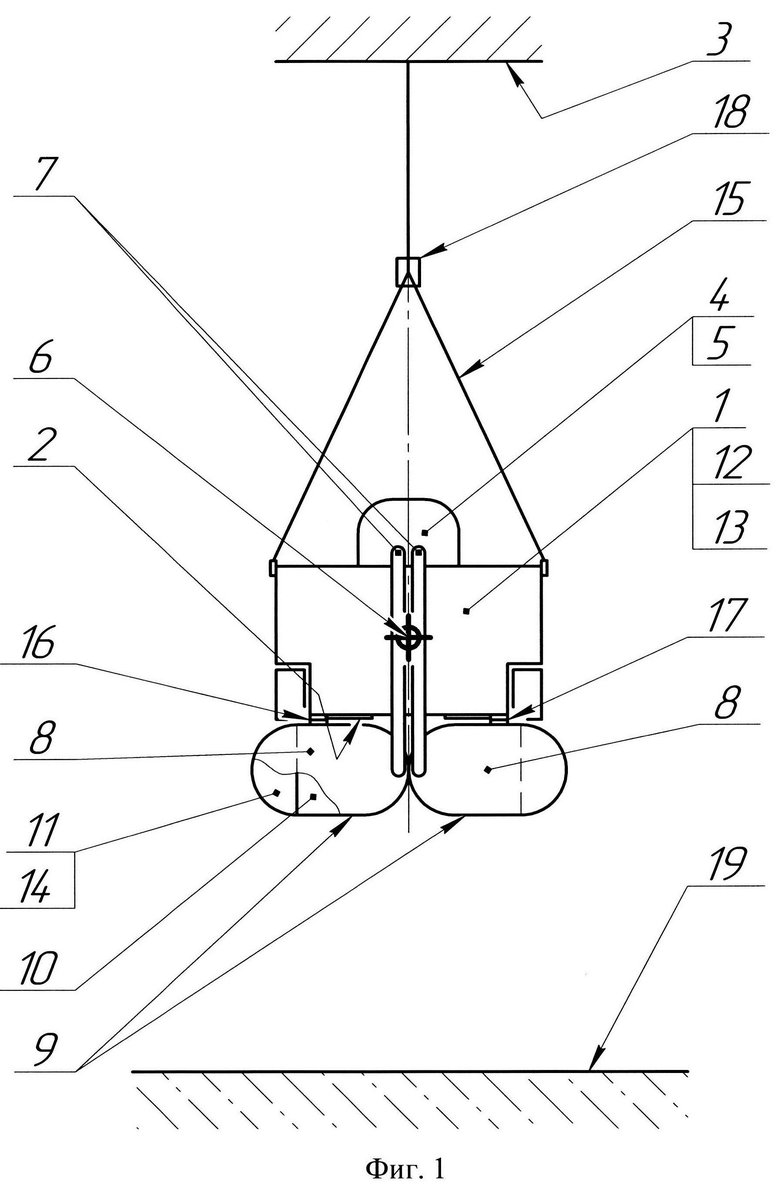
1. Способ копровых испытаний объекта, включающий его подъем на подвесной системе стенда-копра с замком отцепа с размещенными на нем парашютно-десантной системой, включающей лыжи с пневмоамортизаторами принудительного наполнения с воздуховодами с распущенными мягкими замкнутыми оболочками, нагнетательным устройством с заслонками, соединенным с воздуховодами, и средствами измерения и записи физических величин на объекте и на оболочках на высоту, обеспечивающую заданную скорость приземления, определяемую по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности средств десантирования, м,
Vy - вертикальная скорость приземления объекта в момент касания амортизатором площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
hA - высота наполненного воздухом пневмоамортизатора, м,
запуском нагнетательного устройства наполняют мягкие замкнутые оболочки воздухом до заданного избыточного давления, закрывают заслонки, срабатыванием замка отцепа выполняют сбрасывание объекта на заданную площадку приземления стенда-копра.
2. Способ по п. 1, отличающийся тем, что номинальную вертикальную скорость приземления объекта определяют по формуле:
где  - максимальная полетная масса объекта системы «груз-парашют», кг,
- максимальная полетная масса объекта системы «груз-парашют», кг,
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
cn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с.
3. Способ по пп. 1-2, отличающийся тем, что максимальную вертикальную скорость приземления объекта определяют по формуле:
где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент.
4. Способ по пп. 1-3, отличающийся тем, что минимальную вертикальную скорость приземления объекта определяют по формуле:
5. Способ по пп. 1-4, отличающийся тем, что углы крена и тангажа создают за счет изменения длины ветвей подвесной системы стенда-копра.
6. Способ по пп. 1-5, отличающийся тем, что имитацию горизонтальной скорости приземления обеспечивают оттягиванием объекта на заданный угол.
7. Способ по пп. 1-6, отличающийся тем, что при сбрасывании с углом крена высоту подъема измеряют от середины отрезка линии, соединяющей нижние поверхности лыж.
8. Способ по пп. 1-7, отличающийся тем, что при сбрасывании с углом тангажа высоту подъема измеряют от середины лыж.
| Чугун для изготовления котлов и царг | 1957 |
|
SU120225A1 |
| М. П. Ю. Н. Емельянов и В. К. ОдинцовBCLCl-SU-iUAM Д§13г%^;- | 0 |
|
SU266302A1 |
| Способ испытаний парашютных систем и стенд для его осуществления | 2017 |
|
RU2654885C1 |
| CN 111337216 A, 26.06.2020. | |||

