Изобретение относится к испытательной технике, а именно, к динамическим наземным копровым методам испытаний (испытания) объекта на парашютно-бесплатформенной системе (ПБС) с самонаполняющимися пневмоамортизаторами с мягкими незамкнутыми оболочками, на эксплуатационные или иные заданные нагрузки при имитации парашютного приземления на сушу, на воду, и др.
Изобретение может быть использовано для наземных копровых испытаний и исследований функционирования объектов и их средств десантирования - ПБС, например, гусеничных машин после приземления, в том числе - с грузами или антропоморфными манекенами (далее -манекенами), или испытателями - на универсальных сиденьях (креслах) внутри.
Изобретение может использоваться также для наземной проверки прочности и работоспособности различных объектов, приборов и агрегатов парашютно-десантной, и иной техники.
Испытания проводятся на стенде-копре свободного падения.
В качестве объекта испытаний может использоваться, например, гусеничная машина или ее габаритно-массовый макет (ГММ).
В основу настоящего изобретения поставлена задача создания способа копровых испытаний объекта на ПБС с самонаполняющимися пневмоамортизаторами с мягкими незамкнутыми оболочками, в том числе, с использованием оптимальных режимов (параметров) сбросов объекта на стенде-копре (высота сбросов, скорость снижения и др.), обеспечивающих их максимальное сближение с заданными эксплуатационными режимами при реальном парашютном приземлении, с получением максимально объективных результатов: ударные перегрузки по трем ортогональным осям связанной системы координат, время их действия, скорость нарастания, и др.
Это позволит повысить качество испытаний и одновременно снизить (оптимизировать) их объем (например, сократить количество и режимы копровых сбрасываний, и др.), и, тем самым - снизить трудозатраты, сроки и т.д. на этапах копровых и последующих испытаний.
Процесс приземления объекта в действительных условиях происходит в приземном слое воздуха (нижняя часть пограничного слоя толщиной 30…50 метров, непосредственно прилегающая к земной поверхности).
Физические свойства атмосферы в приземном слое (движение воздушных масс - ветер, турбулентность, плотность воздуха, температура, влажность, барометрическое давление и др.) отличаются от свойств атмосферы выше приземного слоя, подвержены постоянным изменениям и могут оказать негативное влияние на результаты (параметры) приземления системы «груз-средства десантирования-парашют».
Кроме того, в действительных условиях в момент приземления скорость системы «груз-средства десантирования-парашют» относительно земли имеет, кроме вертикальной составляющей, также горизонтальную - скорость ветра, отрицательно влияющую на устойчивость объекта.
Расхождение параметров снижения в атмосфере выше приземного слоя и в приземном слое воздуха может оказаться выходящим за пределы заданных, что, в свою очередь, может отрицательно повлиять на результаты копровых сбросов, и, следовательно, отрицательно повлиять на последующую эксплуатацию объекта на ПБС (например, на устойчивость объекта, на значения допустимых ударных перегрузок членов экипажа и др.).
Путь, проходимый системой «груз-средства десантирования-парашют», спускающейся по вертикали в воздухе, находится в прямо пропорциональной зависимости от квадрата вертикальной скорости спуска и в обратно пропорциональной - от ускорения свободного падения.
При действительном же (реальном) приземлении на высоту подъема (путь) для копрового сброса, кроме вышеуказанного, по меньшей мере, влияет предварительный ход, как величина предварительного обжатия оболочек пневмоамортизаторов в момент приземления, при котором в них создается заданное избыточное давление, обеспечивающее принятие заданной формы, с чего начинается эффективная работа - рабочий ход. Предварительный ход - эмпирическая величина, зависящая от конструкции пневмоамортизаторов и заданного диапазона скоростей приземления. (Здесь и далее - «эмпирические величины» получены в результате экспериментов).
На действительную же вертикальную скорость приземления (или на вертикальную составляющую скорости снижения при боковом сносе в приземном слое воздуха), по меньшей мере, влияют:
- работа основной парашютной системы в момент приземления при обжатии пневмоамортизаторов, снижающая скорость приземления на некоторую, эмпирическую, величину;
- разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина.
Техническое решение по настоящему изобретению направлено на реализацию (получение) объективных результатов испытаний:
- за счет максимального приближения условий их проведения к эксплуатационным, путем использования объективных расчетных параметров (режимов), учитывающих особенности копровых сбросов в приземном слое воздуха;
- за счет повышения качества испытаний путем использования высокотехнологичных средств объективного контроля (например, в форме высокотехнологичной контрольно-измерительной аппаратуры - интеллектуального измерительного многоканального прибора для записи процессов, передачи данных и др. - «Вольтметра самопишущего»).
Технический результат заключается в создании способа наземных копровых испытаний различных объектов на ПБС с самонаполняющимися пневмоамортизаторами с мягкими незамкнутыми оболочками для испытаний и исследований функционирования объектов и ПБС, в том числе, объектов с грузами или манекенами, или испытателями на универсальных сиденьях внутри объекта.
Предлагаемый способ испытаний максимально приближен к заданным реальным (эксплуатационным) условиям (режимам) парашютного приземления, что позволяет реализовать получение максимально объективных результатов.
Также, цель копровых испытаний: определение соответствия изготовленных объектов и ПБС требованиям технической документации, техническим условиям (ТУ), Тактико-техническому заданию (ТТЗ) или Техническому заданию (ТЗ), значительное сокращение сроков постановки объектов и ПБС на производство, изготовления и передачи Заказчику, снижение трудозатрат на последующих этапах и видах испытаний, например, летных или натурных, в которых используется дорогостоящая техника, высококвалифицированные специалисты, оборудование и материалы.
В случаях заданных испытаний ПБС проводят определение фактических характеристик и оценку работоспособности средств десантирования ПБС (пневмоамортизаторов, их оболочек, и др.) при воздействии ударных перегрузок, возникающих в процессе парашютного приземления заданного объекта на заданной ПБС и, при необходимости, доводят характеристики ПБС до заданных ТУ, ТТЗ или ТЗ, и т.д.
По результатам технических копровых испытаний (без испытателей) принимается решение о возможности или невозможности проведения физиологических сбрасываний с доработкой или без доработки объекта и ПБС, с испытателями на универсальных сиденьях внутри - в случае заданного проведения физиологических копровых испытаний.
Так, например, при испытаниях объекта - гусеничной машины и размещенной на ней ПБС с самонаполняющимися пневмоамортизаторами с мягкими замкнутыми оболочками, проводят заданное определение внутреннего давления в камерах оболочек пневмоамортизаторов до и в процессе приземления, определение ударных перегрузок на корпусе машины и на ее других элементах, время их действия и других заданных характеристик, действующих на корпусе машины и на ее других элементах, и на универсальных сиденьях, в том числе, с размещенными на них манекенами или испытателями, или грузами (например, в виде мешков с песком или дробью массой 100 кг, имитирующих габариты и массу испытателя).
Поставленная задача достигается тем, что заявляемый способ испытаний объекта на ПБС с самонаполняющимися пневмоамортизаторами с распущенными мягкими незамкнутыми оболочками, содержащей основание с лыжами, по меньшей мере, средства записи процессов на объекте и на оболочках, включающий подъем на подвесной системе стенда-копра с замком отцепа на высоту, обеспечивающую заданную скорость приземления, которую определяют по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности лыж, м,
Vy - вертикальная скорость приземления объекта в момент касания лыжами площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
Δh - ход - величина обжатия пневмоамортизаторов, при которой в них создается заданное давление воздуха, обеспечивающее принятие ими заданной формы, с чего начинается их эффективная работа - рабочий ход, обеспечивающий амортизирующий эффект, м, эмпирическая величина, зависящая от конструкции пневмоамортизаторов и заданного диапазона скоростей приземления, где номинальную вертикальную скорость приземления объекта определяют по формуле:
где  - максимальная полетная масса объекта системы «груз-парашют», кг,
- максимальная полетная масса объекта системы «груз-парашют», кг,
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
cn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с,
где максимальную вертикальную скорость приземления объекта определяют по формуле:
где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент,
где минимальную вертикальную скорость приземления объекта определяют по формуле:
срабатыванием замка отцепа выполняют сбрасывание объекта, по меньшей мере, с заданными параметрами имитации крена, тангажа и горизонтальной скорости приземления на заданную площадку стенда-копра (суша: специальный грунт, бетонированная площадка; вода и др.).
Способ имеет следующие частные случаи исполнения.
Углы крена и тангажа создают за счет изменения длины ветвей подвесной системы стенда-копра.
Имитацию горизонтальной скорости приземления обеспечивают оттягиванием объекта на заданный угол.
При сбрасывании с углами крена и тангажа высоту подъема измеряют от геометрического центра площади проекции амортизирующей системы.
Изобретение поясняется фигурами, которые не охватывают и, тем более, не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами варианта частного случая способа испытаний объекта на эксплуатационные нагрузки - ГММ гусеничной машины на ПБС с самонаполняющимися пневмоамортизаторами, содержащей единое основание с лыжами, с антропоморфными манекенами на универсальных сиденьях, сбросы на заданную площадку приземления (на бетонированную площадку). Испытаниям подвергаются ГММ и ПБС.
Фиг. 1 отображает схему стенда-копра с подвешенным на нем ГММ, корпус которого и универсальные сиденья оснащены датчиками перегрузок, а мягкие оболочки (камеры) пневмоамортизаторов оснащены датчиками давления. Стрелками показаны направления движения воздуха в момент снижения ГММ с ПБС на стенде-копре (стрелки снизу основания показывают самонаполнение камер пневмоамортизаторов набегающим потоком воздуха через донные клапаны) и при приземлении (перепуск воздуха при обжатии пневмоамортизаторов из основных камер в дополнительные, а из них - выпуск через выпускные клапаны в атмосферу). Снизу на днище ГММ размещена ПБС с распущенными самонаполняющимися вертикальными пневмоамортизаторами с незамкнутыми мягкими оболочками, содержащая единое основание с лыжами и другие необходимые при испытаниях средства десантирования, подготовленных к сбросу на стенде-копре, вид на корму ГММ.
Фиг. 2 отображает схему размещения датчиков перегрузок на корпусе ГММ и на универсальных сиденьях №1 и №2 (креслах) с манекенами (не показаны), X, Y и Z - ориентация осей датчиков перегрузок, вид сверху.
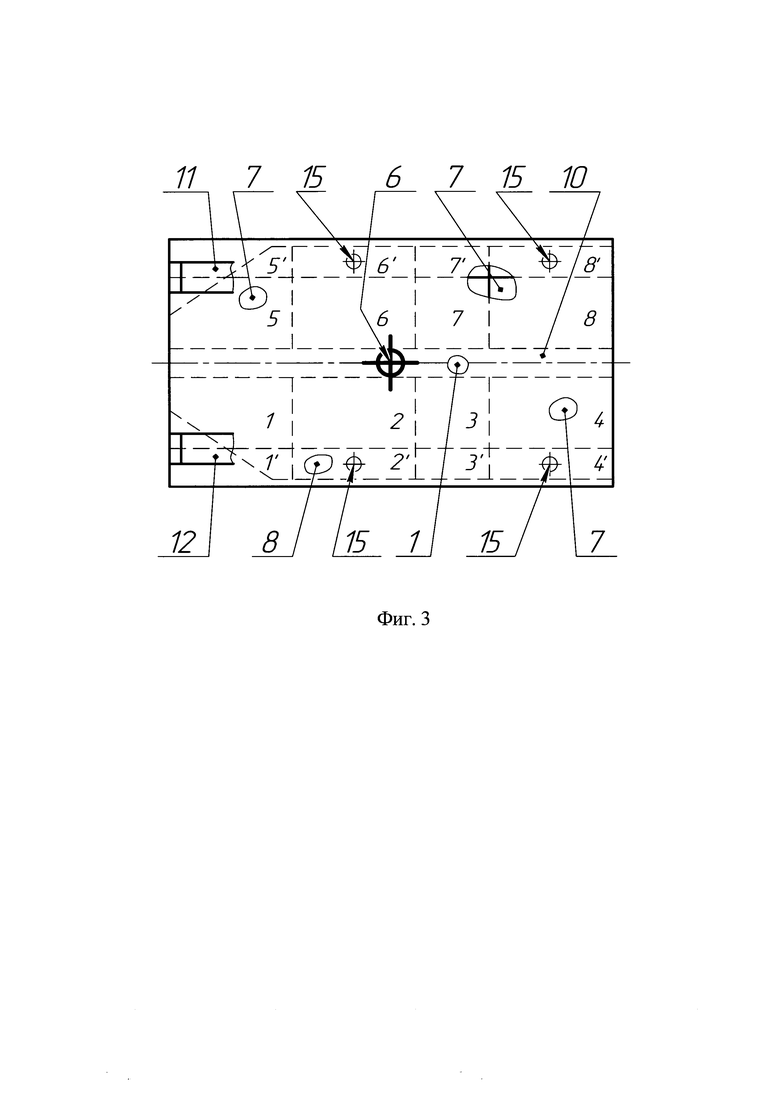
Фиг. 3 отображает схему расположения основных (номера: 1…4, 5…8) и дополнительных (номера: l1…41, 51…81) камер пневмоамортизаторов ПБС, образующих амортизирующую систему. Камеры симметрично размещены относительно продольной оси симметрии машины.
Датчики давления воздуха размещены в дополнительных камерах (номера: 61, 81 и 21, 41), вид снизу.
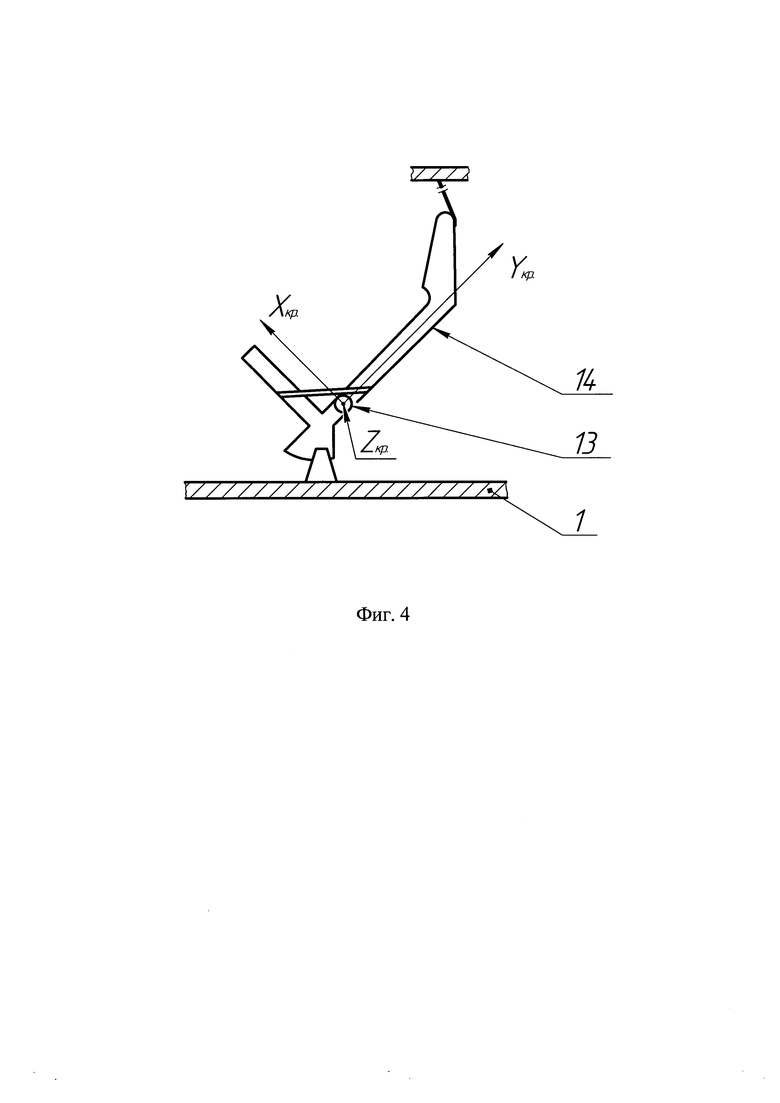
Фиг. 4 отображает универсальное сиденье (кресло) с датчиком перегрузок, установленного внутри ГММ на кронштейны на полу и на потолке, в положении для десантирования (манекен не показан), Хкр., Yкp. и Zкp. - ориентация осей датчика перегрузок, вид сбоку.
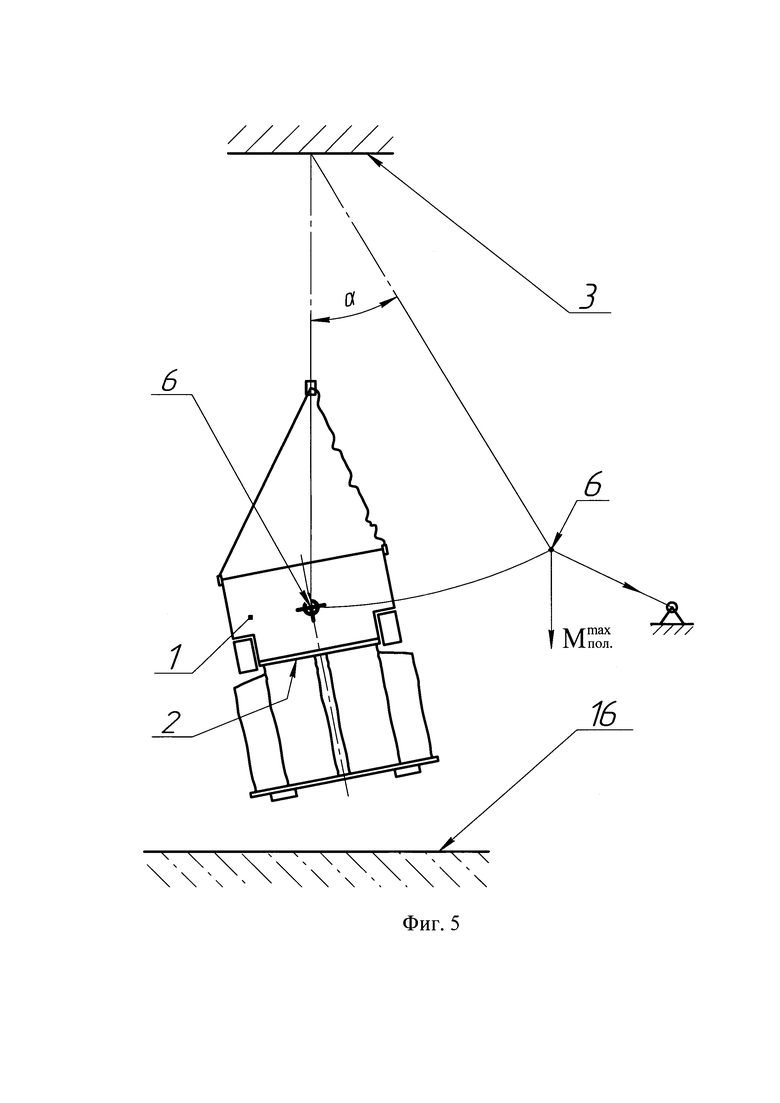
Фиг. 5 отображает схему имитации горизонтальной скорости ГММ при приземлении со сносом, вид с торца на корму.
Способ копровых испытаний заключается в следующем.
Подготовка и выполнение копрового сбрасывания.
Размещают на ГММ 1 ПБС 2 (в комплектации средств десантирования для копрового сбрасывания) (фиг. 1).
Определяют массу машины 1 с ПБС 2 (в комплектации средств десантирования для копрового сбрасывания), подготовленных к копровому сбрасыванию, взвешиванием на стенде-копре 3 с использованием, например, крановых подвесных весов СВК-20000Д и подвесной системы 4 стенда-копра 3 с замком отцепа 5.
Определяют положение общего центра масс 6.
Распускают (расправляют) основные 7 и дополнительные 8 камеры пневмоамортизаторов 9 ПБС 2 для обеспечения их самонаполнения встречным потоком воздуха при копровом сбрасывании на стенде-копре 3 (ГММ 1 с ПБС 2 - в приподнятом положении). ПБС 2 содержит, в том числе, единое основание 10 с левой 11 и правой 12 лыжами, где пневмоамортизаторы 9 прикреплены своими нижними основаниями к единому основанию 10 ПБС 2 (фиг. 3).
Размещают датчики перегрузок 13 по правому и левому бортам на корпусе ГММ 1 (фиг. 2) и на универсальных сиденьях 14 (ГММ 1 - в опущенном положении), фиг. 4. Датчики перегрузок 13 могут быть размещены также непосредственно на манекенах в заданных местах и на других элементах ГММ 1.
Приподнимают ГММ 1 с ПБС 2 на стенде-копре 3, и затем опускают, например, на четыре подставки (из состава стенда-копра 3) с опиранием на днище ГММ 1.
Устанавливают датчики 15 (фиг. 3) измерения давления, например, внутри дополнительных камер 8 пневмоамортизаторов 9 или в других заданных местах и количестве в основных 7 и дополнительных 8 камерах.
Размещают на ГММ 1 другие необходимые средства десантирования из комплектации для копрового сбрасывания.
Определяют высоту, обеспечивающую заданную скорость приземления ГММ 1 по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности лыж, м,
Vy - вертикальная скорость приземления объекта в момент касания лыжами площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
Δh - ход - величина обжатия пневмоамортизаторов, при которой в них создается заданное избыточное давление воздуха, обеспечивающее принятие ими заданной формы, с чего начинается их эффективная работа - рабочий ход, обеспечивающий амортизирующий эффект, м, эмпирическая величина, зависящая от конструкции пневмоамортизаторов и заданного диапазона скоростей приземления.
Определяют номинальную вертикальную скорость приземления ГММ 1 по формуле:
где  - максимальная полетная масса ГММ 1 системы «груз-парашют», кг.
- максимальная полетная масса ГММ 1 системы «груз-парашют», кг.
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
cn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с.
Определяют максимальную вертикальную скорость приземления ГММ 1 по формуле:
где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент.
Определяют минимальную вертикальную скорость приземления ГММ 1 по формуле:
Создают углы крена и тангажа за счет изменения длины ветвей подвесной системы 4 стенда-копра 3.
Обеспечивают имитацию горизонтальной скорости приземления оттягиванием ГММ 1 с ПБС 2 на заданный угол «α» (фиг. 5).
Измеряют высоту подъема при сбрасывании с углами крена и тангажа от геометрического центра площади проекции амортизирующей системы.
Закрепляют замок отцепа 5 на крюке стенда-копра 3, устанавливают на него звенья подвесной системы 4 стенда-копра 3.
Подготавливают замок отцепа 5 к работе.
Поднимают ГММ 1 с ПБС 2 на заданную высоту «Н» (рассчитываемую по вышеизложенной формуле), убирают подставки.
Для измерений избыточного давления воздуха используют, например, средство измерений в виде измерительного прибора, например, «Напоромер НМП-52-М3» (производитель - Российская Федерация), устанавливаемый, например, в четыре дополнительных камеры 8 пневмоамортизаторов 9 (фиг. 3). Могут быть установлены также иные заданные средства, например, для измерения, записи, сбора, обработки и передачи данных (давления) в основных 7 и дополнительных 8 камерах до сброса, в процессе сброса и при приземлении ГММ 1.
Включают измерительную аппаратуру - средство записи процессов и др., и передачи данных (перегрузок на корпусе ГММ 1 и на универсальных сиденьях 14 при испытаниях).
Используют, например, интеллектуальный измерительный многоканальный прибор для измерений и записи перегрузок по трем осям - «Вольтметр самопишущий «Flash-Recorder-3 М3» с высокотехнологичным программным обеспечением, способным, например, анализировать сигналы, сравнивать их с заданными пороговыми значениями, производить фильтрацию и анализ в реальном времени, на высокой скорости и др. (производитель - Российская Федерация), позволяющих измерять и записывать результаты измерений (в том числе - дистанционно), а также вести запись данных на съемный флэш-диск, передачу их дистанционно на заданное расстояние, и производить другие операции.
Используют его с вибропреобразователями (датчиками), например, «АР2038Р-100» (производитель - Российская Федерация),
Для видео- и фотофиксации процесса приземления (срабатывание системы сброса, процесс обжатия мягких оболочек камер 7 и 8 пневмоамортизаторов 9, и др.) и внешнего вида ГММ 1 с ПБС 2 используют, например, видеокамеры, например, модель «Canon HF G30».
При этом видеокамеры должны быть установлены на специальных стойках и на таком расстоянии, при котором машина 1 с ПБС 2 и оболочки пневмоамортизаторов 9 амортизирующей ПБС 2 постоянно находились бы в кадре в процессе сбрасывания и при приземлении.
Выполняют сбрасывание ГММ 1 с ПБС 2 на заданную площадку приземления 16 (бетон) стенда-копра 3 срабатыванием замка отцепа 5.
Выполняют заданное количество копровых сбросов (экспериментов) с различными заданными параметрами (в том числе, в разных сочетаниях параметров, включая сбросы с максимально предельными, возможными «худшими» случаями парашютного приземления, заданными ТУ, ТТЗ или ТЗ), например:
- вертикальная скорость приземления (минимальная, номинальная, максимальная);
- горизонтальная скорость приземления (максимальная);
- угол тангажа (на нос или на корму ГММ 1, максимальный);
- угол крена (на правый или на левый борты ГММ 1, максимальный);
- высота сбрасывания (расчетная или заданная);
- площадка приземления (суша: обычный грунт - земля, специальный грунт, бетонированная площадка; вода, и др.), а также с иными заданными параметрами сбросов.
Выполняют технические сбросы для назначения и подготовки к последующему проведению физиологических сбросов с испытателями на универсальных сиденьях 14 внутри машины, в случае назначения, например, проведения последующих копровых физиологических испытаний.
Оценка результатов копровых сбросов (экспериментов).
Оценивают ударные перегрузки и другие заданные характеристики, действующие на корпусе ГММ 1 и на универсальных сиденьях 14, например, сравнивая их с требованиями ТУ, ТТЗ или ТЗ, после каждого копрового сброса (эксперимента).
Определяют фактические характеристики пневмоамортизаторов 9, и, при необходимости, доводят их до заданных ТУ, ТТЗ или ТЗ.
Оценивают прочность конструкции, работоспособность, общее состояние, функционирование систем и оборудования, устойчивость к воздействию максимальных ударных перегрузок при приземлении на заданных средствах десантирования.
Определяют фактические характеристики и работоспособность камер 7, 8, пневмоамортизаторов 9 и ПБС 2 в целом, устойчивость ГММ 1, ПБС 2 к воздействию ударных перегрузок при приземлении ГММ 1 на ПБС 2, например, сравнивания соответствие результатов копровых сбрасываний с требованиями ТУ, ТТЗ или ТЗ, в том числе, например, сравнивания параметры срабатывания (давление и др.) выпускных клапанов воздуха при приземлении с заданными значениями, после каждого копрового сброса (эксперимента).
Контролируют состояние и целостность мягких оболочек 7 и 8, и выпускных клапанов воздуха после каждого копрового сброса (эксперимента).
Выдают рекомендации (совместно с профильными медицинскими организациями) к проведению или непроведению без доработок машины, универсальных сидений и ПБС 2 для последующих видов и этапов испытаний, например, копровых физиологических, летных и других.
Материальная, в том числе, технологическая часть для проведения испытаний, включая ГММ 1, и ПБС 2 не содержат дефицитных материалов и комплектующих. Использование изобретения по назначению и утилизация в полном объеме его материальной части не наносят вреда окружающей среде и человеку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ копровых испытаний объекта на парашютно-десантной системе с пневмоамортизаторами принудительного наполнения | 2021 |
|
RU2782174C1 |
| Энергоёмкий пневмоамортизатор для десантирования грузов (варианты) | 2020 |
|
RU2753782C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2019 |
|
RU2722828C1 |
| Парашютная платформа | 2021 |
|
RU2763204C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ДЕСАНТИРОВАНИЯ ГРУЗОВ | 2007 |
|
RU2349509C1 |
| СПОСОБ ОТДЕЛЕНИЯ ГРУЗА ОТ ПАРАШЮТНОЙ СИСТЕМЫ | 2019 |
|
RU2745508C2 |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
| Парашютно-десантное амортизационное устройство со средством ориентации объекта продольной осью по потоку | 2024 |
|
RU2825911C1 |
| Способ наземной отработки элементов парашютной подготовки и устройство, его реализующее | 2023 |
|
RU2832674C2 |
| АМОРТИЗИРУЮЩАЯ ПЛАТФОРМА | 1979 |
|
SU1840525A1 |
Изобретение относится к испытательной технике, к динамическим наземным копровым методам испытаний (испытания) объекта на парашютно-бесплатформенной системе (ПБС) с самонаполняющимися пневмоамортизаторами с мягкими незамкнутыми оболочками, на эксплуатационные или иные заданные нагрузки. Способ включает подъем объекта на подвесной системе стенда-копра с замком отцепа с размещённой на нем ПБС с самонаполняющимися пневмоамортизаторами с распущенными мягкими незамкнутыми оболочками, содержащей основание с лыжами, по меньшей мере средства записи процессов на объекте и на оболочках на высоту, обеспечивающую заданную скорость приземления, которую определяют по формуле. При этом срабатыванием замка отцепа выполняют сбрасывание объекта по меньшей мере с заданными параметрами имитации крена, тангажа и горизонтальной скорости на заданную площадку стенда-копра. Технический результат заключается в создании способа испытаний максимально приближенных к заданными эксплуатационными режимами при реальном парашютном приземлении с получением максимально объективных результатов, снижении трудозатрат и времени на последующих этапах и видах испытаний. 3 з.п. ф-лы, 5 ил. 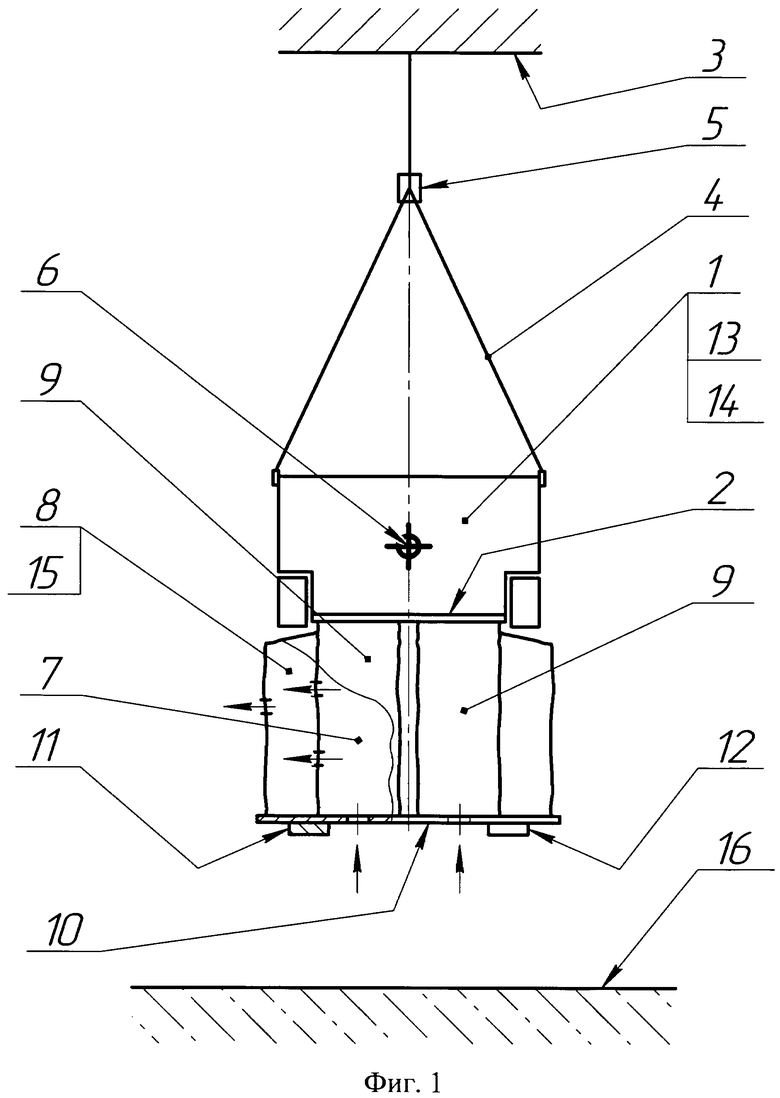
1. Способ копровых испытаний объекта на парашютно-бесплатформенной системе с самонаполняющимися пневмоамортизаторами с распущенными мягкими незамкнутыми оболочками, содержащей основание с лыжами, по меньшей мере средства записи процессов на объекте и на оболочках, включающий подъем на подвесной системе стенда-копра с замком отцепа на высоту, обеспечивающую заданную скорость приземления, которую определяют по формуле:
где Н - высота подъема - расстояние от уровня площадки приземления до нижней поверхности лыж, м,
Vy - вертикальная скорость приземления объекта в момент касания лыжами площадки приземления, м/с,
g - ускорение свободного падения, g=9,81 м/с2,
Δh - ход - величина обжатия пневмоамортизаторов, при которой в них создается заданное давление воздуха, обеспечивающее принятие ими заданной формы, с чего начинается их эффективная работа - рабочий ход, обеспечивающий амортизирующий эффект, м, эмпирическая величина, зависящая от конструкции пневмоамортизаторов и заданного диапазона скоростей приземления,
где номинальную вертикальную скорость приземления объекта определяют по формуле:
где  - максимальная полетная масса объекта системы «груз-парашют», кг,
- максимальная полетная масса объекта системы «груз-парашют», кг,
ρ - плотность воздуха, зависящая от высоты площадки приземления над уровнем моря и температуры окружающей среды, кг/м3,
cn - коэффициент сопротивления основной парашютной системы,
Fn - суммарная площадь основной парашютной системы, м2,
ΔV - величина снижения скорости приземления за счет работы парашютной системы на этапе приземления объекта при обжатии пневмоамортизаторов, эмпирическая величина, м/с,
где максимальную вертикальную скорость приземления объекта определяют по формуле:

где σ - разброс значений скорости приземления - среднее квадратическое отклонение за счет турбулентности воздуха, эмпирическая величина, м/с,
k - эмпирический коэффициент,
где минимальную вертикальную скорость приземления объекта определяют по формуле:
срабатыванием замка отцепа выполняют сбрасывание объекта, по меньшей мере, с заданными параметрами имитации крена, тангажа и горизонтальной скорости на заданную площадку приземления стенда-копра.
2. Способ по п. 1, отличающийся тем, что углы крена и тангажа создают за счет изменения длины ветвей подвесной системы стенда-копра.
3. Способ по пп. 1, 2, отличающийся тем, что имитацию горизонтальной скорости приземления обеспечивают оттягиванием объекта на заданный угол.
4. Способ по пп. 1-3, отличающийся тем, что при сбрасывании с углами крена и тангажа высоту подъема измеряют от геометрического центра площади проекции амортизирующей системы.
| Способ копровых испытаний объекта на парашютно-десантной системе с пневмоамортизаторами принудительного наполнения | 2021 |
|
RU2782174C1 |
| Энергоёмкий пневмоамортизатор для десантирования грузов (варианты) | 2020 |
|
RU2753782C1 |
| Чугун для изготовления котлов и царг | 1957 |
|
SU120225A1 |
| М. П. Ю. Н. Емельянов и В. К. ОдинцовBCLCl-SU-iUAM Д§13г%^;- | 0 |
|
SU266302A1 |
| CN 111337216 A, 26.06.2020. | |||

