ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[1] По настоящей заявке испрашивается приоритет предварительной заявки на выдачу патента США №62/895,339, поданной 3 сентября 2019 года, и заявки на выдачу патента США №17/004,616, поданной 27 августа 2020 года, которые полностью включены в настоящий документ посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[2] Настоящее изобретение относится к технологиям кодирования облака точек и, в частности, к сжатию геометрии облака точек, включая обобщение сжатия MPEG/G-РСС с потерями с использованием треугольной сетки (trisoup) и быструю схему оптимизации «скорость-искажения» (RDO, rate-distortion optimization).
2. Уровень техники
[3] Улучшенные трехмерные представления мира делают возможным более захватывающие формы взаимодействия и связи. Они также позволяют машинам понимать, интерпретировать наш мир и осуществлять в нем навигацию. В качестве трехмерного представления мира широко используются облака точек. Были определены случаи использования, связанные с данными облака точек, и разработаны соответствующие требования для представления и сжатия облака точек.
[4] Облако точек это набор точек в трехмерном пространстве, каждая из которых имеет связанные с ней атрибуты, например цвет, свойства материала и т.д. Облака точек можно использовать для реконструкции объекта или сцены как композиции таких точек. Они могут быть захвачены с помощью нескольких камер и датчиков глубины в различных установках и могут состоять из тысяч и миллиардов точек для реалистичного представления реконструированных сцен.
[5] Для уменьшения объема данных, требуемых для представления облака точек, необходимы технологии сжатия. Таким образом, необходимы технологии сжатия облаков точек с потерями для использования при осуществлении связи в реальном времени и в виртуальной реальности с шестью степенями свободы (DoF, Degree of Freedom). Кроме того, требуется технология сжатия облаков точек без потерь в контексте динамического картографирования для автономного вождения, приложений, связанных с культурным наследием, и т.д. Группа MPEG начала работу над стандартом, который касается сжатия геометрии и атрибутов, таких как цвет и отражательная способность, масштабируемого/прогрессивного кодирования, кодирования последовательностей облаков точек, захваченных во времени, и произвольного доступа к подмножествам облака точек.
[6] При кодировании геометрии G-PCC с потерями с использованием треугольной сетки может случиться так, что, например, многообразие будет слишком сложным для моделирования с помощью ограниченного числа свободных параметров.
[7] Поэтому имеется потребность в техническом решении таких проблем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[8] Для решения одной или более различных технических проблем настоящее изобретение обобщает технологию треугольной сетки, принятую в MPEG/G-PCC, а также рассматривает схему оптимизации «скорость-искажения» (RDO, rate-distortion optimization) для предлагаемого обобщенного кодирования с использованием треугольной сетки.
[9] Предлагаются способ и устройство, содержащее память, сконфигурированную для хранения компьютерного программного кода, и процессор или процессоры, сконфигурированные для доступа к компьютерному программному коду и работы в соответствии с инструкциями компьютерного программного кода. Компьютерный программный код включает код получения, сконфигурированный для обеспечения получения, по меньшей мере одним процессором, листового узла данных сжатия облака точек на основе геометрии (G-PCC, geometry based point cloud compression), код разделения, сконфигурированный для обеспечения разделения, по меньшей мере одним процессором, листового узла на множество кубоидов, код получения, сконфигурированный для обеспечения получения, по меньшей мере одним процессором, отдельных треугольных сеток для каждого кубоида, и код кодирования, сконфигурированный для обеспечения кодирования, по меньшей мере одним процессором, множества флагов соответственно для каждого из ребер каждого кубоида, при этом множество флагов указывает, присутствуют ли вершины отдельных треугольных сеток на ребрах из упомянутых ребер.
[10] Согласно примерам осуществления изобретения код кодирования также сконфигурирован для обеспечения выполнения, по меньшей мере одним процессором, энтропийного кодирования сигнализации шаблона разделения листового узла посредством двух битов, при этом два бита указывают, разделен ли листовой узел на кубоиды пополам вдоль одной из осей х, у и z.
[11] Согласно примерам осуществления изобретения, местоположение, в котором листовой узел разделен по меньшей мере вдоль одной из осей х и у, сигнализируют для каждого кубоида.
[12] Согласно примерам осуществления изобретения, код получения также сконфигурирован для обеспечения получения, по меньшей мере одним процессором, рекурсивного получения треугольных сеток в листовом узле среди множества ведущих узлов данных G-PCC.
[13] Согласно примерам осуществления изобретения код кодирования также сконфигурирован для обеспечения выполнения, по меньшей мере одним процессором, энтропийного кодирования сигнализации шаблона разделения листового узла посредством трех битов, причем эти три бита указывают, разделен ли листовой узел на кубоиды пополам вдоль одной из осей х, у и z, комбинации осей х и у, комбинации осей х и z, комбинации осей у иг, а также комбинации осей х, у и z.
[14] Согласно примерам осуществления изобретения, местоположение, в котором листовой узел разделен по меньшей мере вдоль одной из осей х, у и z, сигнализируют для каждого кубоида.
[15] Согласно примерам осуществления изобретения, компьютерный программный код также включает код определения, сконфигурированный для обеспечения определения, по меньшей мере одним процессором, того, установлен ли для листового узла флаг, указывающий по меньшей мере одно направление, вдоль которого листовой узел не может быть разделен.
[16] Согласно примерам осуществления изобретения, компьютерный программный код также включает код определения, сконфигурированный для обеспечения определения, по меньшей мере одним процессором, шаблона разделения согласно схеме оптимизации «скорость-искажения» (RDO).
[17] Согласно примерам осуществления изобретения, разделение листового узла на множество кубоидов включает разделение листового узла пополам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[18] Другие признаки, принципы и различные преимущества настоящего изобретения будут понятны из последующего подробного описания и прилагаемых чертежей.
[19] Фиг. 1-9 В представляют собой схематические иллюстрации диаграмм в соответствии с вариантами осуществления изобретения.
[20] Фиг. 10 и 11 представляют собой упрощенные структурные схемы в соответствии с вариантами осуществления изобретения.
[21] Фиг. 12 представляет собой упрощенную иллюстрацию в соответствии с вариантами осуществления изобретения.
[22] Фиг. 13 представляет собой упрощенную иллюстрацию последовательности операций в соответствии с вариантами осуществления изобретения.
[23] Фиг. 14 представляет собой схематическую иллюстрацию диаграммы в соответствии с вариантами осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[24] Предлагаемые функции, обсуждаемые ниже, можно использовать по отдельности или комбинировать в любом порядке. Кроме того, варианты осуществления изобретения могут быть реализованы схемами обработки (например, одним или более процессорами или одной или более интегральными схемами). В одном примере один или более процессоров исполняют программу, которая хранится на машиночитаемом носителе.
[25] На фиг. 1 показана упрощенная структурная схема системы 100 связи согласно варианту осуществления настоящего изобретения. Система 100 связи может содержать по меньшей мере два терминала 102 и 103, соединенных друг с другом через сеть 105. Для однонаправленной передачи данных первый терминал 103 может кодировать видеоданные в локальном местоположении для их передачи в другой терминал 102 через сеть 105. Второй терминал 102 может принимать кодированные видеоданные другого терминала из сети 105, декодировать кодированные данные и отображать восстановленные видеоданные. Однонаправленная передача данных может быть свойственна приложениям служб массовой информации и т.п.
[26] Фиг. 1 иллюстрирует вторую пару терминалов 101 и 104, предоставленных для поддержки двунаправленной передачи кодированных видеоданных, возникающих, например, в ходе видеоконференцсвязи. Для двунаправленной передачи данных каждый из терминалов 101 и 104 может кодировать видеоданные, захваченные в локальном местоположении, для их передачи в другой терминал через сеть 105. Каждый из терминалов 101 и 104 также может принимать кодированные видеоданные, передаваемые другим терминалом, декодировать кодированные данные и отображать восстановленные видеоданные на локальном устройстве отображения.
[27] На фиг. 1 терминалы 101, 102, 103 и 104 могут быть проиллюстрированы как серверы, персональные компьютеры и смартфоны, но это не ограничивает принципы настоящего изобретения. Варианты осуществления настоящего изобретения находят применение для портативных компьютеров, планшетных компьютеров, медиаплееров и/или специального оборудования для видеоконференцсвязи. Сеть 105 представляет любое количество сетей, которые переносят кодированные видеоданные между терминалами 101, 102, 103 и 104, включая, например, проводные и/или беспроводные сети связи. Сеть 105 связи позволяет обмениваться данными в режиме канальной коммутации и/или пакетной коммутации. Примеры сетей включают телекоммуникационные сети, локальные сети, глобальные сети и/или интернет. Для настоящего рассмотрения архитектура и топология сети 105 могут не иметь отношения к настоящему изобретению, если конкретно не указаны ниже.
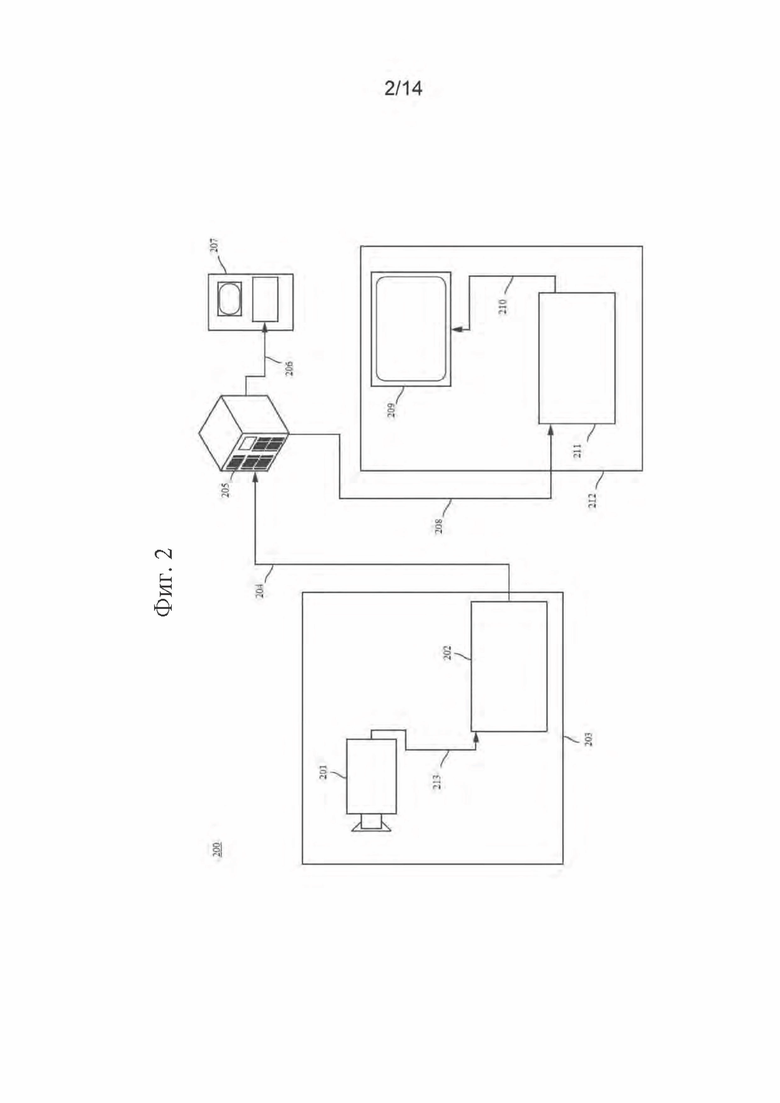
[28] На фиг. 2 показано размещение видеокодера и видеодекодера в окружении потоковой передачи, в качестве примера применения настоящего изобретения. Настоящее изобретение может в равной степени использоваться и в других применениях обработки видеоданных, включая, например, видеоконференцсвязь, цифровое телевидение, хранение сжатого видео на цифровых носителях, в том числе CD, DVD, карте памяти и т.п.
[29] Система потоковой передачи может содержать подсистему 203 захвата, которая может включать источник 201 видеоданных, например, цифровую камеру, создающую, например, поток 213 отсчетов видеоданных, не подвергнутых сжатию. Поток 213 отсчетов может быть показан как имеющий большой объем данных по сравнению с битовыми потоками кодированных видеоданных и может обрабатываться кодером 202, связанным с камерой 201. Кодер 202 может включать оборудование, программное обеспечение или их комбинацию для обеспечения или реализации аспектов настоящего изобретения, как более подробно описано ниже. Битовый поток 204 кодированных видеоданных, который может быть показан как имеющий меньший объем данных по сравнению с потоком отсчетов, может храниться на потоковом сервере 205 для использования в будущем. Один или более клиентов 212 и 207 потоковой передачи могут осуществлять доступ к потоковому серверу 205 для извлечения копий 208 и 206 битового потока 204 кодированных видеоданных. Клиент 212 может содержать видеодекодер 211, который декодирует входящую копию битового потока 208 кодированных видеоданных и создает исходящий поток 210 отсчетов, который может визуализироваться на дисплее 209 или другом устройстве визуализации (не показано). В некоторых системах потоковой передачи битовые потоки 204, 206 и 208 видеоданных могут кодироваться согласно тем или иным стандартам кодирования/сжатия видеоданных. Примеры этих стандартов указаны выше и описаны подробно ниже.
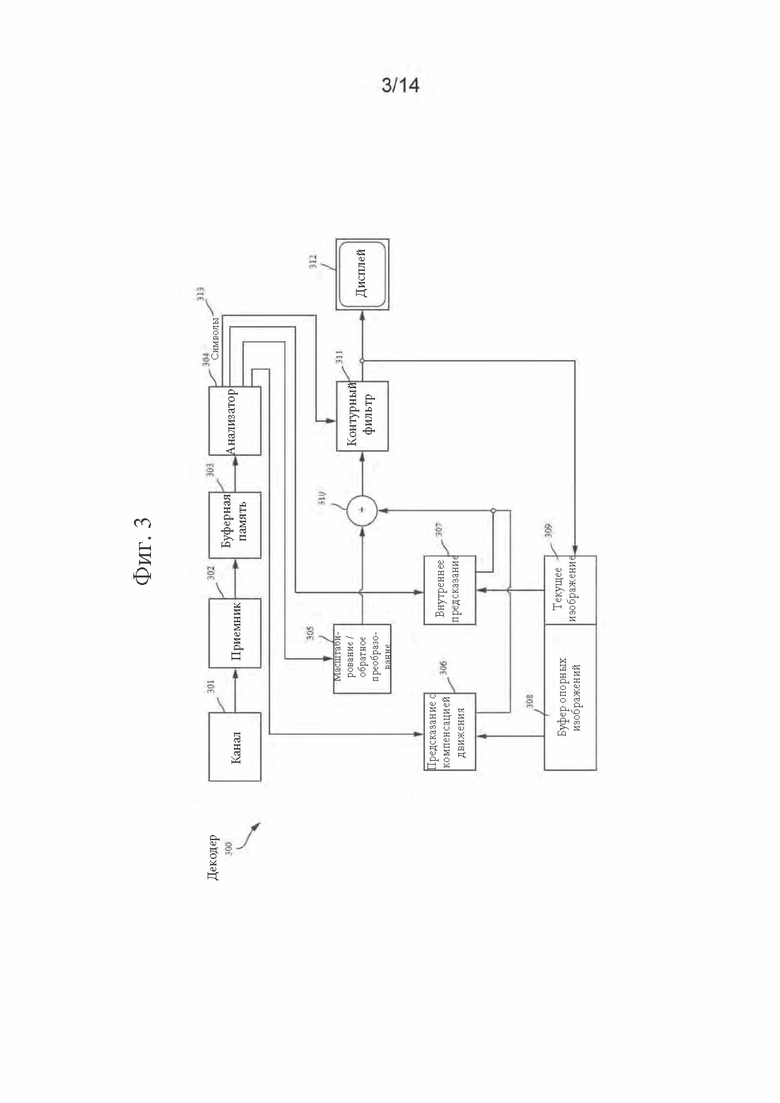
[30] На фиг. 3 показана функциональная схема видеодекодера 300 согласно варианту осуществления настоящего изобретения.
[31] Приемник 302 может принимать одну или более кодированных видеопоследовательностей для декодирования видеодекодером 300, в том же или другом варианте осуществления изобретения, по одной кодированной видеопоследовательности за раз, причем декодирование каждой кодированной видеопоследовательности не зависит от других кодированных видеопоследовательностей. Кодированная видеопоследовательность может приниматься из канала 301, который может быть аппаратной/программной линией связи с запоминающим устройством, где хранятся кодированные видеоданные. Приемник 302 может принимать кодированные видеоданные с другими данными, например, кодированными аудиоданными и/или вспомогательными потоками данных, которые могут перенаправляться на соответствующие использующие их объекты (не показаны). Приемник 302 может отделять кодированную видеопоследовательность от других данных. Для борьбы с джиттером сети, между приемником 302 и энтропийным декодером/анализатором 304 (далее «анализатором») может быть подключена буферная память 303. Когда приемник 302 принимает данные от устройства хранения/перенаправления с достаточной полосой и управляемостью или из изосинхронной сети, буферная память 303 может быть не нужна или может быть мала. Для использования в пакетных сетях наилучшей попытки, например, в интернете, буферная память 303 может потребоваться, может быть сравнительно большой и может иметь преимущественно адаптивный размер.
[32] Видеодекодер 300 может содержать анализатор 304 для реконструкции символов 313 из энтропийно-кодированной видеопоследовательности. Категории этих символов включают информацию, используемую для управления работой видеодекодера 300 и, возможно, информацию для управления устройством визуализации, таким как дисплей 312, который не является неотъемлемой частью декодера, но может быть подключен к нему. Информация управления для устройств(а) визуализации может представлять собой сообщения дополнительной информации улучшения (SEI, Supplemental Enhancement Information) или фрагменты набора параметров информации о возможности использования видео (VUI, Video Usability Information) (не показаны). Анализатор 304 может анализировать / энтропийно декодировать принятую кодированную видеопоследовательность. Кодирование видеопоследовательности может осуществляться в соответствии с технологией или стандартом кодирования видеоданных и может следовать различным принципам, включая кодирование с переменной длиной серии, кодирование Хаффмана, арифметическое кодирование с контекстной чувствительностью или без нее и т.д. Анализатор 304 может извлекать из кодированной видеопоследовательности набор параметров подгруппы для по меньшей мере одной из подгрупп пикселей в видеодекодере на основе по меньшей мере одного параметра, соответствующего группе. Подгруппы могут включать группы изображений (GOP, Groups of Pictures), изображения, тайлы, слайсы, макроблоки, единицы кодирования (CU, Coding Unit), блоки, единицы преобразования (TU, Transform Unit), единицы предсказания (PU, Prediction Unit) и т.д. Энтропийный декодер / анализатор также может извлекать из кодированной видеопоследовательности информацию, например, коэффициенты преобразования, значения параметров квантования, векторы движения и т.д.
[33] Анализатор 304 может осуществлять операцию энтропийного декодирования / анализа видеопоследовательности, принятой из буферной памяти 303, для создания символов 313. Анализатор 304 может принимать кодированные данные и выборочно декодировать определенные символы 313. Кроме того, анализатор 304 может определять, должны ли конкретные символы 313 подаваться в модуль 306 предсказания с компенсацией движения, модуль 305 масштабирования / обратного преобразования, модуль 307 внутреннего предсказания или контурный фильтр 311.
[34] Для реконструкции символов 313 могут использоваться несколько различных модулей в зависимости от типа кодированного видеоизображения или его частей (например: изображения с внутренним и внешним кодированием, блоки с внутренним и внешним кодированием) и других факторов. Какие модули и как используются, может определяться информацией управления подгруппами, полученной из кодированной видеопоследовательности анализатором 304. Поток такой информации управления подгруппами между анализатором 304 и модулями для простоты в дальнейшем не показан.
[35] Помимо ранее упомянутых функциональных блоков, видеодекодер 300 может принципиально разделяться на несколько функциональных модулей, как описано ниже. В практической реализации в условиях коммерческих ограничений многие из этих модулей тесно взаимодействуют друг с другом и могут, по меньшей мере частично, встраиваться один в другой. Однако в целях описания настоящего изобретения уместно принципиальное разделение на перечисленные ниже функциональные модули.
[36] Первым модулем является модуль 305 масштабирования / обратного преобразования. Модуль 305 масштабирования / обратного преобразования принимает квантованный коэффициент преобразования, а также информацию управления, включающую используемое преобразование, размер блока, коэффициент квантования, матрицы масштабирования квантования и т.д. в качестве символа(ов) 313 от анализатора 304. Он может выводить блоки, содержащие значения отсчетов, которые можно вводить в агрегатор 310.
[37] В ряде случаев выходные отсчеты модуля 305 масштабирования / обратного преобразования могут относиться к блоку с внутренним кодированием, то есть к блоку, который не использует предсказанную информацию из ранее реконструированных изображений, но может использовать предсказанную информацию из ранее реконструированных частей текущего изображения. Такая предсказанная информация может обеспечиваться модулем 307 внутреннего предсказания изображения. В ряде случаев модуль 307 внутреннего предсказания изображения формирует блок такого же размера и формы, как у блока, подлежащего реконструкции, с использованием информации уже реконструированного окружения, извлеченной из текущего (частично реконструированного) изображения 309. Агрегатор 310 в ряде случаев добавляет, для каждого отсчета, информацию предсказания, сформированную модулем 307 внутреннего предсказания, в информацию выходных отсчетов, предоставленную модулем 305 масштабирования / обратного преобразования.
[38] В других случаях выходные отсчеты модуля 305 масштабирования / обратного преобразования могут относиться к блоку с внутренним кодированием, возможно, с компенсацией движения. В таком случае модуль 306 предсказания с компенсацией движения может осуществлять доступ к памяти 308 опорных изображений для извлечения отсчетов, используемых для предсказания. После применения компенсации движения к извлеченным отсчетам в соответствии с символами 313, относящимися к блоку, эти отсчеты могут добавляться агрегатором 310 к выходному сигналу модуля масштабирования / обратного преобразования (в этом случае называемому отсчетами остатка или сигналом остатка) для формирования информации выходных отсчетов. Адреса в памяти опорных изображений, откуда модуль предсказания с компенсацией движения извлекает отсчеты для предсказания, могут управляться векторами движения, доступными модулю предсказания с компенсацией движения, в форме символов 313, которые могут иметь, например, компоненты X, Y и компоненты опорного изображения. Компенсация движения также может включать интерполяцию значений отсчетов, извлеченных из памяти опорных изображений, когда используются точные векторы движения подотсчетов, механизмы предсказания векторов движения и т.д.
[39] К выходным отсчетам агрегатора 310 можно применять различные методы контурной фильтрации в модуле 311 контурного фильтра. Технологии сжатия видеоданных могут включать технологии контурного фильтра под управлением с помощью параметров, включенных в битовый поток кодированных видеоданных и доступных модулю 311 контурного фильтра в качестве символов 313 от анализатора 304, но также могут реагировать на метаинформацию, полученную в ходе декодирования предыдущих (в порядке декодирования) частей кодированного изображения или кодированной видеопоследовательности, а также реагировать на ранее реконструированные и подвергнутые контурной фильтрации значения отсчетов.
[40] Модуль 311 контурного фильтра может выдавать поток отсчетов, который может поступать на устройство 312 визуализации, а также сохраняться в памяти 557 опорных изображений для использования в будущем внешнем предсказании изображения.
[41] Некоторые кодированные изображения, будучи полностью реконструированы, могут использоваться в качестве опорных изображений для будущего предсказания. Например, когда кодированное изображение полностью реконструировано и идентифицировано как опорное изображение (например, анализатором 304), текущее опорное изображение 309 может становиться частью буферной памяти 308 опорных изображений, и может повторно выделяться свежая память для текущего изображения до начала реконструкции следующего кодированного изображения.
[42] Видеодекодер 300 может осуществлять операции декодирования согласно заранее заданной технологии сжатия видеоданных, задокументированной в стандарте, таком как Рекомендация МСЭ-Т Н.265. Кодированная видеопоследовательность может соответствовать синтаксису, заданному используемой технологией или используемым стандартом сжатия видеоданных, в том смысле, что кодированная видеопоследовательность может придерживаться синтаксиса технологии или стандарта сжатия видеоданных, указанного в документе технологии сжатия видеоданных или в стандарте и, в частности, в документе, касающемся профилей. Также для согласованности может быть необходимо, чтобы сложность кодированной видеопоследовательности оставалась в границах, заданных уровнем технологии или стандарта сжатия видеоданных. В ряде случаев, уровни ограничивают максимальный размер изображения, максимальную частоту кадров, максимальную частоту отсчетов для реконструкции (измеряемую, например, в мегаотсчетах в секунду), максимальный размер опорного изображения и т.д. Пределы, установленные уровнями, в ряде случаев могут дополнительно ограничиваться спецификациями гипотетического эталонного декодера (HRD, Hypothetical Reference Decoder) и метаданными для управления буфером HRD, сигнализируемыми в кодированной видеопоследовательности.
[43] Согласно варианту осуществления изобретения, приемник 302 может принимать дополнительные (избыточные) данные с кодированными видеоданными. Дополнительные данные могут быть включены как часть кодированной(ых) видеопоследовательности(ей). Дополнительные данные могут использоваться видеодекодером 300 для правильного декодирования данных и/или более точной реконструкции исходных видеоданных. Дополнительные данные могут представлять собой, например, временные уровни улучшения, пространственные уровни улучшения или уровни улучшения отношения «сигнал/шум» (SNR, signal noise ratio), избыточные слайсы, избыточные изображения, коды прямой коррекции ошибок и т.д.
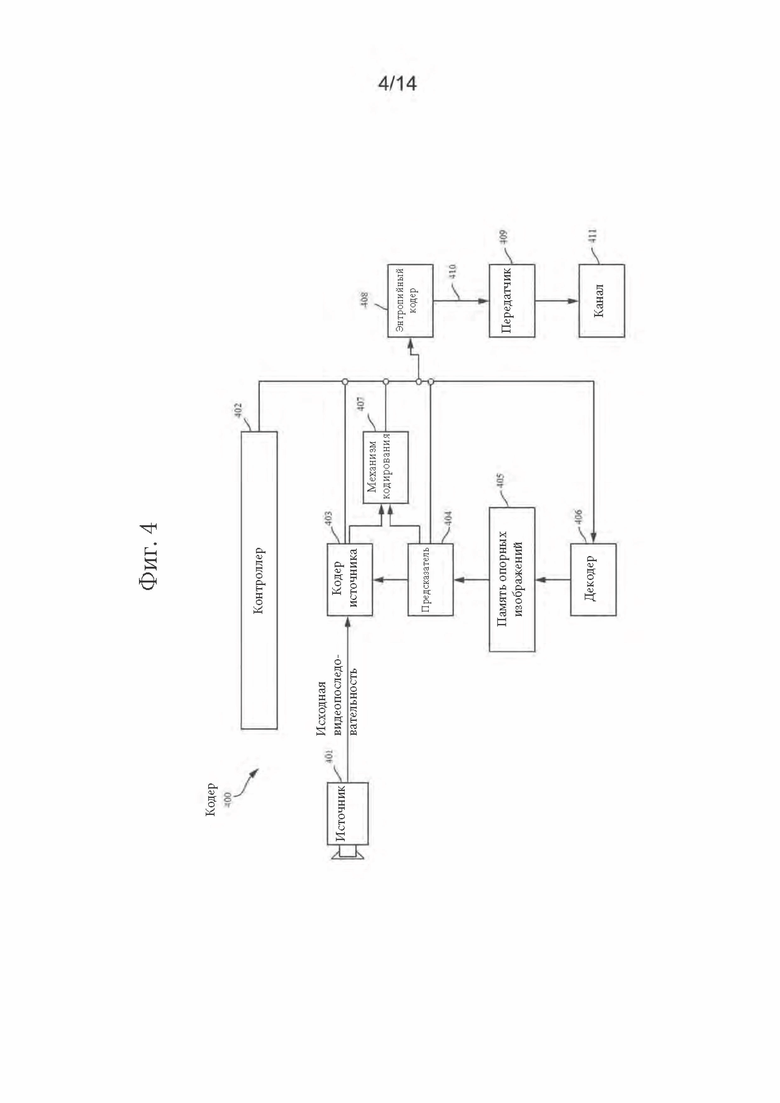
[44] На фиг. 4 показана функциональная схема видеокодера 400 согласно варианту осуществления настоящего изобретения.
[45] Кодер 400 может принимать отсчеты видеоданных от источника 401 видеоданных (который не входит в состав кодера), который может захватывать видеоизображение(я), подлежащее(ие) кодированию видеокодером 400.
[46] Источник 401 видеоданных может обеспечивать исходную видеопоследовательность, подлежащую кодированию видеокодером 303, в форме потока отсчетов цифровых видеоданных любой подходящей битовой глубины (например: 8 битов, 10 битов, 12 битов, …), любого цветового пространства (например, ВТ.601 Y CrCB, RGB, …) и любой подходящей структуры дискретизации (например, Y СrСb 4:2:0, Y СrСb 4:4:4). В системе службы массовой информации источником 401 видеоданных может быть запоминающее устройство, где хранится ранее подготовленное видео. В системе видеоконференцсвязи источником 401 видеоданных может быть камера, которая захватывает информацию локального изображения в виде видеопоследовательности. Видеоданные могут предоставляться как множество отдельных изображений, которые создают ощущение движения при наблюдении в последовательности. Сами изображения могут быть организованы как пространственный массив пикселей, где каждый пиксель может содержать один или более отсчетов в зависимости от используемой структуры дискретизации, цветового пространства и т.д. Специалисту в данной области техники нетрудно понять соотношение между пикселями и отсчетами. Последующее описание посвящено отсчетам.
[47] Согласно варианту осуществления изобретения, кодер 400 может кодировать и сжимать изображения исходной видеопоследовательности в кодированную видеопоследовательность 410 в реальном времени или с учетом любых других временных ограничений, налагаемых применением. Установление надлежащей скорости кодирования является одной из функций контроллера 402. Контроллер управляет другими функциональными модулями, как описано ниже, и функционально подключен к ним. Подключение для простоты не показано. Параметры, установленные контроллером, могут включать параметры, связанные с регулировкой частоты (пропуск изображения, квантователь, значение лямбда, применяемое в методах оптимизации «скорость-искажения», и т.д.), размер изображения, организацию групп изображений (GOP, group of pictures), максимальную зону поиска вектора движения и т.д. Специалисту в данной области техники понятно, что контроллер 402 может иметь другие подходящие функции, относящиеся к видеокодеру 400, оптимизированному для конкретной конструкции системы.
[48] Некоторые видеокодеры могут работать в «контуре кодирования», как понятно специалисту в данной области техники. В качестве очень упрощенного описания, например, контур кодирования может включать кодирующую часть кодера 402 (называемую здесь «кодером источника») (отвечающую за создание символов, например, потока символов на основе входного изображения, подлежащего кодированию, и опорного(ых) изображения(ий)) и (локальный) декодер 406, встроенный в кодер 400, который реконструирует символы для создания данных отсчетов, как это делал бы (удаленный) декодер (поскольку любое сжатие символов в битовый поток кодированных видеоданных происходит без потерь в технологиях сжатия видеоданных, рассматриваемых в данном описании). Реконструированный поток отсчетов поступает в память 405 опорных изображений. Поскольку декодирование потока символов приводит к результатам, с точностью до бита, которые не зависят от положения (локального или удаленного) декодера, содержимое буфера опорных изображений также будет одинаковым с точностью до бита для локального кодера и удаленного кодера. Другими словами, часть предсказания кодера «видит» в качестве отсчетов опорного изображения точно такие же значения отсчетов, как «видел» бы декодер при использовании предсказания в ходе декодирования. Этот фундаментальный принцип синхронизма опорного изображения (и, в итоге, дрейф, если синхронизм не удается поддерживать, например, вследствие канальных ошибок) хорошо известен специалисту в данной области техники.
[49] «Локальный» декодер 406 может действовать таким же образом, как «удаленный» декодер 300, подробно описанный выше со ссылкой на фиг. 3. Однако, опять же, согласно фиг. 4, поскольку символы доступны, и кодирование/декодирование символов в кодированную видеопоследовательность энтропийным кодером 408 и анализатором 304 может осуществляться без потерь, части энтропийного декодирования декодера 300, включающие канал 301, приемник 302, буфер 303 и анализатор 304, могут быть не полностью реализованы в локальном декодере 406.
[50] При этом можно сделать вывод, что любая технология декодирования, присутствующая в декодере, за исключением анализа / энтропийного декодирования, также обязательно должна присутствовать по существу в идентичной функциональной форме в соответствующем кодере. Описание технологий кодирования может быть сокращено, поскольку они являются обратными подробно описанным технологиям декодирования. Лишь в некоторых областях требуется более подробное описание, которое приведено ниже.
[51] Согласно некоторым примерам, в ходе работы кодер 403 источника может осуществлять кодирование с предсказанием и компенсацией движения, при котором входной кадр кодируется с предсказанием на основе одного или более ранее кодированных кадров из видеопоследовательности, указанных как «опорные кадры». Таким образом, механизм 407 кодирования кодирует разности между блоками пикселей входного кадра и блоками пикселей опорного кадра(ов), которое(ые) может(ут) выбираться в качестве ссылки(ок) предсказания на входной кадр.
[52] Локальный видеодекодер 406 может декодировать кодированные видеоданные кадров, которые могут быть указаны как опорные кадры, на основе символов, созданных кодером 403 источника. Операции механизма 407 кодирования могут быть преимущественно способами с потерями. Когда кодированные видеоданные могут декодироваться в видеодекодере (не показан на фиг. 4), реконструированная видеопоследовательность обычно может представлять собой копию исходной видеопоследовательности с некоторыми ошибками. Локальный видеодекодер 406 дублирует процессы декодирования, которые могут осуществляться видеодекодером на опорных кадрах, и может обеспечивать сохранение реконструированных опорных изображений в кэш-памяти 405 опорных кадров. Таким образом, кодер 400 может локально сохранять копии реконструированных опорных кадров, имеющие такое же содержимое, как реконструированные опорные кадры, которые будут получены удаленным видеодекодером (в отсутствие ошибок передачи).
[53] Предсказатель 404 может осуществлять поиски предсказания для механизма 407 кодирования. Таким образом, для нового кадра, подлежащего кодированию, предсказатель 404 может искать в памяти 405 опорных изображений данные отсчетов (в качестве кандидатов на роль опорных блоков пикселей) или конкретные метаданные, например, векторы движения опорного изображения, формы блоков и т.д., которые могут служить надлежащей ссылкой для предсказания новых изображений. Предсказатель 404 может работать на основе «блоки отсчетов × блоки пикселей» для нахождения надлежащих ссылок для предсказания. В ряде случаев, согласно результатам поиска, полученным предсказателем 404, входное изображение может иметь ссылки для предсказания, извлеченные из множества опорных изображений, хранящихся в памяти 405 опорных изображений.
[54] Контроллер 402 может управлять операциями кодирования видеокодера 403, включая, например, установление параметров, а также параметров подгруппы, используемых для кодирования видеоданных.
[55] Выходной сигнал всех вышеупомянутых функциональных модулей может подвергаться энтропийному кодированию в энтропийном кодере 408. Энтропийный кодер переводит символы, сформированные различными функциональными модулями, в кодированную видеопоследовательность путем сжатия символов без потерь согласно, например, технологиям, известным специалисту в данной области техники, например, согласно кодированию Хаффмана, кодированию с переменной длиной серии, арифметическому кодированию и т.д.
[56] Передатчик 409 может буферизовать кодированную(ые) видеопоследовательность(и), созданную(ые) энтропийным кодером 408, для подготовки к передаче через канал 411 связи, который может быть аппаратной/программной линией связи с запоминающим устройством, где хранятся кодированные видеоданные. Передатчик 409 может объединять кодированные видеоданные от видеокодера 403 с другими данными, подлежащими передаче, например, с кодированными аудиоданными и/или вспомогательными потоками данных (источники не показаны).
[57] Контроллер 402 может управлять работой кодера 400. В ходе кодирования контроллер 405 может назначать каждому кодированному изображению тот или иной тип кодированного изображения, который может определять методы кодирования, применимые к соответствующему изображению. Например, изображениям часто могут назначаться следующие типы кадров.
[58] Изображение с внутренним кодированием (I-изображение), которое можно кодировать и декодировать без использования какого-либо другого кадра в последовательности в качестве источника для предсказания. Некоторые видеокодеки допускают разные типы изображений с внутренним кодированием, включая, например, изображения в формате независимого обновления декодера (IDR, Independent Decoder Refresh). Специалисту в данной области техники известны разновидности I-изображений и их соответствующие варианты применения и особенности.
[59] Изображение с предсказанием (Р-изображение), которое можно кодировать и декодировать с использованием внутреннего предсказания или внешнего предсказания с использованием не более одного вектора движения и опорного индекса для предсказания значений отсчетов каждого блока.
[60] Изображение с двунаправленным предсказанием (В-изображение), которое можно кодировать и декодировать с использованием внутреннего предсказания или внешнего предсказания с использованием не более двух векторов движения и опорных индексов для предсказания значений отсчетов каждого блока. Аналогично, изображения с множеством предсказаний могут использовать более двух опорных изображений и соответствующие метаданные для реконструкции одного блока.
[61] Исходные изображения обычно допускают пространственное разделение на множество блоков отсчетов (например, блоки 4×4, 8×8, 4×8 или 16×16 отсчетов каждый) и кодирование на поблочной основе (блок за блоком). Блоки могут кодироваться с предсказанием со ссылкой на другие (ранее кодированные) блоки, определенные назначением кодирования, применяемым к соответствующим изображениям этих блоков. Например, блоки I-изображений могут кодироваться без предсказания или с предсказанием со ссылкой на ранее кодированные блоки того же изображения (с пространственным предсказанием или внутренним предсказанием). Блоки пикселей Р-изображений могут кодироваться без предсказания, посредством пространственного предсказания или временного предсказания со ссылкой на одно ранее кодированное опорное изображение. Блоки В-изображений могут кодироваться без предсказания, посредством пространственного предсказания или временного предсказания со ссылкой на одно или два ранее кодированных опорных изображения.
[62] Видеокодер 400 может осуществлять операции кодирования согласно заранее заданной технологии или стандарту кодирования видеоданных, например, Рекомендации МСЭ-Т Н.265. В своей работе видеокодер 400 может осуществлять различные операции сжатия, в том числе операции кодирования с предсказанием, которые используют временную и пространственную избыточность во входной видеопоследовательности. Поэтому кодированные видеоданные могут соответствовать синтаксису, заданному используемой технологией или стандартом кодирования видеоданных.
[63] Согласно варианту осуществления изобретения, передатчик 409 может передавать дополнительные данные с кодированными видеоданными. Кодер 403 источника может включать такие данные как часть кодированной видеопоследовательности. Дополнительные данные могут содержать временные/пространственные/SNR уровни улучшения, другие формы избыточных данных, например, избыточные изображения и слайсы, сообщения дополнительной информации улучшения (SEI), фрагменты набора параметров информации о возможности использования видео (VUI) и т.д.
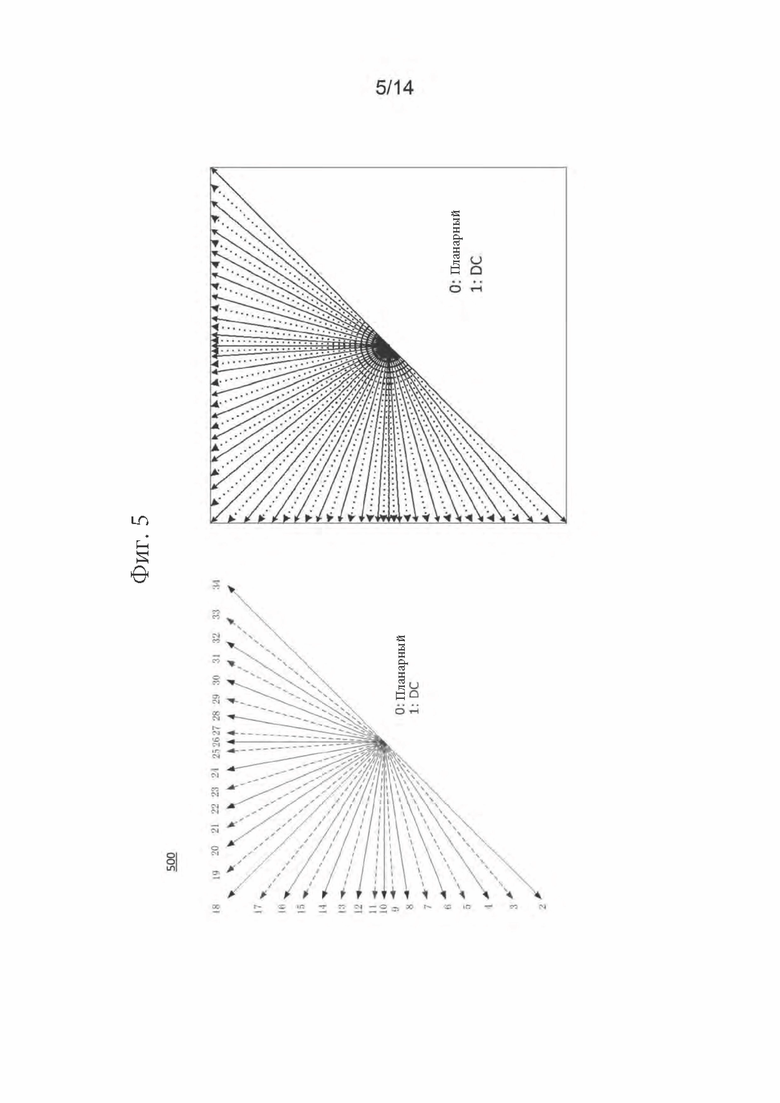
[64] На фиг. 5 показаны режимы внутреннего предсказания, используемые в HEVC и JEM. Для захвата произвольных направлений границ, представленных в естественном видео, количество режимов направленного внутреннего предсказания увеличено с 33, используемых в HEVC, до 65. Дополнительные режимы направленного предсказания в JEM поверх HEVC показаны пунктирными стрелками на фиг. 1(b), при этом планарный режим и режим DC остаются прежними. Эти более плотные режимы направленного внутреннего предсказания применяются для всех размеров блоков и для внутреннего предсказания как яркости, так и цветности. Как показано на фиг. 5, режимы направленного внутреннего предсказания, обозначенные пунктирными стрелками, которые связаны с нечетным индексом режима внутреннего предсказания, называются нечетными режимами внутреннего предсказания. Режимы направленного внутреннего предсказания, обозначенные сплошными стрелками, которые связаны с четным индексом режима внутреннего предсказания, называются четными режимами внутреннего предсказания. В этом описании режимы направленного внутреннего предсказания, обозначенные сплошными или пунктирными стрелками на фиг. 5, также называются угловыми режимами.
[65] В JEM всего 67 режимов внутреннего предсказания используются для внутреннего предсказания яркости. Для кодирования в режиме внутреннего предсказания создается список наиболее вероятных режимов (МРМ, most probable mode) размера 6 на основе режимов внутреннего предсказания соседних блоков. Если режим внутреннего предсказания не входит в список МРМ, сигнализируется флаг, указывающий, принадлежит ли режим внутреннего предсказания выбранным режимам. В JEM-3.0 есть 16 выбранных режимов, которые выбраны однородно как каждый четвертый угловой режим. В JVET-D0114 и JVET-G0060 получено 16 вторичных режимов МРМ вместо однородно выбранных режимов.
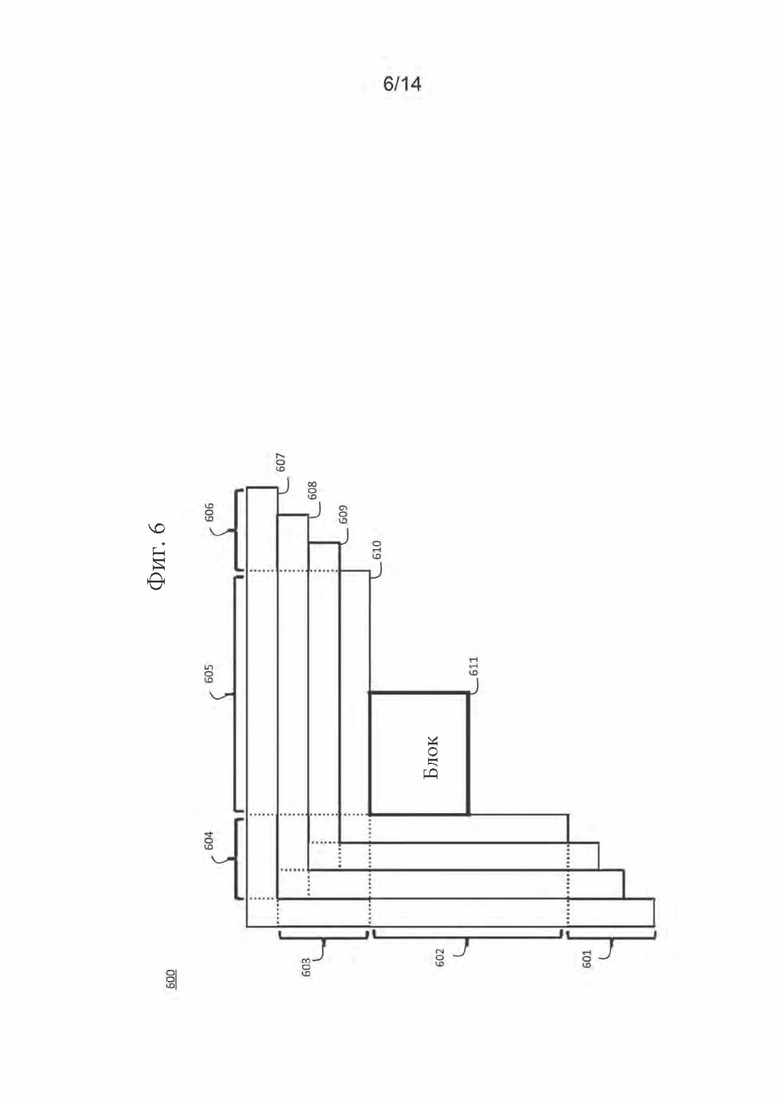
[66] На фиг. 6 показаны N опорных уровней, используемых для режимов направленного внутреннего предсказания. Есть блок 611, сегмент А 601, сегмент В 602, сегмент С 603, сегмент D 604, сегмент Е 605, сегмент F 606, первый опорный уровень 610, второй опорный уровень 609, третий опорный уровень 608 и четвертый опорный уровень 607.
[67] Как в HEVC, так и в JEM, а также в некоторых других стандартах, таких как H.264/AVC, опорные отсчеты, используемые для предсказания текущего блока, ограничены ближайшей опорной линией (строкой или столбцом). В способе внутреннего предсказания с несколькими опорными линиями количество возможных опорных линий (строк или столбцов) увеличивается с одной (то есть ближайшей) до N для режимов направленного внутреннего предсказания, где N является целым числом, большим или равным единице. На фиг. 2 в качестве примера используется блок предсказания (PU, prediction unit) размером 4×4 для иллюстрации концепции способа многострочного направленного внутреннего предсказания. Режим направленного внутреннего предсказания может произвольно выбрать один из N опорных уровней для формирования предсказателей. Другими словами, предсказатель р(х,у) формируется из одного из опорных отсчетов S1, S2, …, SN. Сигнализируется флаг, указывающий, какой опорный уровень выбран для режима направленного внутреннего предсказания. Если значение N установлено равным 1, способ направленного внутреннего предсказания такой же, как традиционный способ в JEM 2.0. На фиг. 6 опорные линии 610, 609, 608 и 607 состоят из шести сегментов 601, 602, 603, 604, 605 и 606 вместе с верхним левым опорным отсчетом. В этом документе опорный уровень также называется опорной линией. Координаты верхнего левого пикселя в текущем блоке равны (0, 0), а координаты верхнего левого пикселя в первой опорной линии равны (-1, -1).
[68] В JEM для компонента яркости соседние отсчеты, используемые для отсчетов с внутренним предсказанием, фильтруются перед процессом формирования. Фильтрация управляется заданным режимом внутреннего предсказания и размером блока преобразования. Если режим внутреннего предсказания DC или размер блока преобразования равен 4×4, соседние отсчеты не фильтруются. Если расстояние между заданным режимом внутреннего предсказания и вертикальным режимом (или горизонтальным режимом) больше, чем заранее заданный порог, процесс фильтрации включается. Для фильтрации соседних отсчетов используются фильтр [1, 2, 1] и билинейные фильтры.
[69] Способ комбинации внутреннего предсказания в зависимости от позиции (PDPC, position dependent intra prediction combination) это способ внутреннего предсказания, который использует комбинацию нефильтрованных опорных отсчетов границы и внутреннего предсказания в стиле HEVC с отфильтрованными опорными отсчетами границы. Каждый отсчет предсказания pred[x][y], расположенный в (х, у), вычисляется следующим образом:

где Rx,-1,R-1,y представляют нефильтрованные опорные отсчеты, расположенные сверху и слева от текущего отсчета (х,у), соответственно, a R-1,-1 представляет нефильтрованный опорный отсчет, расположенный в верхнем левом углу текущего блока. Весовые коэффициенты рассчитываются следующим образом:




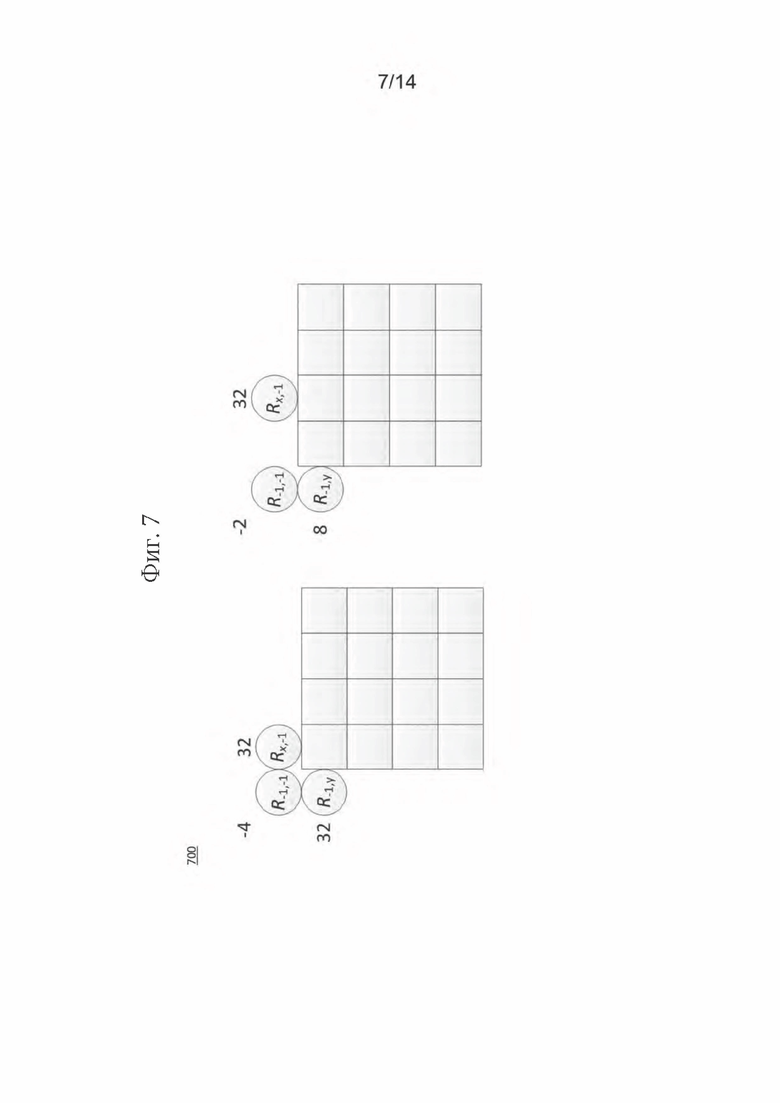
[70] Фиг. 7 иллюстрирует диаграмму 700 с весами PDPC в режиме DC (wL, wT, wTL) для позиций (0, 0) и (1, 0) внутри одного блока 4×4. Если PDPC применяется к режиму DC, планарному, горизонтальному и вертикальному режиму внутреннего предсказания, не требуются дополнительные фильтры границ, такие как фильтр границ режима DC HEVC или фильтры границ горизонтального/вертикального режима. Фиг. 7 иллюстрирует определение опорных отсчетов Rx,-1, R-1,y и R-1,-1 для PDPC, примененного к диагональному режиму сверху справа. Отсчет предсказания pred(x', у') расположен в (х', у') в блоке предсказания. Координата х опорного отсчета Rx,-1 определяется как х=х'+у'+1, а координата у опорного отсчета R-1,y аналогичным образом определяется как у=х'+у'+1.
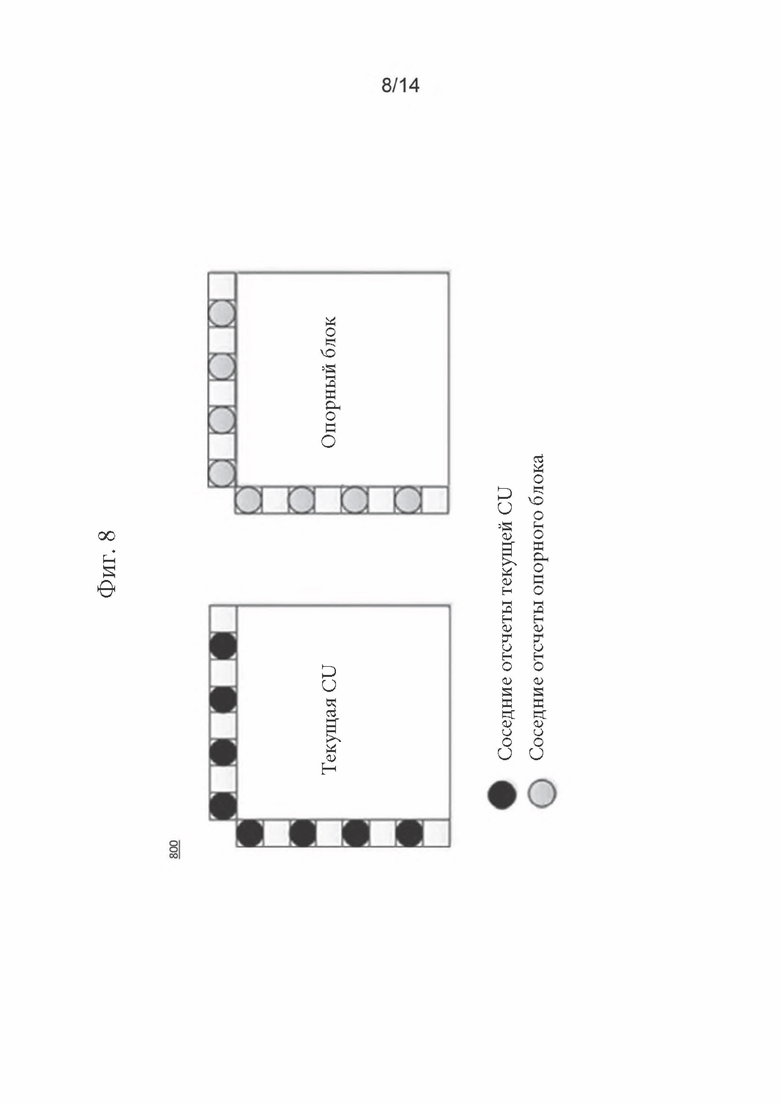
[71] На фиг. 8 показана диаграмма 800 компенсации локальной освещенности (LIC, Local Illumination Compensation), которая основана на линейной модели изменений освещенности с использованием коэффициента масштабирования а и смещения b. Она включается или выключается адаптивно для каждой единицы кодирования (CU, coding unit), кодированной в режиме внешнего предсказания.
[72] Когда LIC применяется для единицы CU, используется метод наименьших квадратов ошибок для получения параметров а и b с использованием соседних отсчетов текущей единицы CU и их соответствующих опорных отсчетов. Более конкретно, как показано на фиг. 8, используются субдискретизированные (при субдискретизации 2:1) соседние отсчеты единицы CU и соответствующие отсчеты (идентифицированные информацией о движении текущей единицы CU или подъединицы CU) в опорном изображении. Параметры IС получают и применяют отдельно для каждого направления предсказания.
[73] Когда единица CU кодируется в режиме слияния, флаг LIC копируется из соседних блоков аналогично копированию информации о движении в режиме слияния; в противном случае для единицы CU сигнализируется флаг LIC для указания, применяется ли LIC или нет.
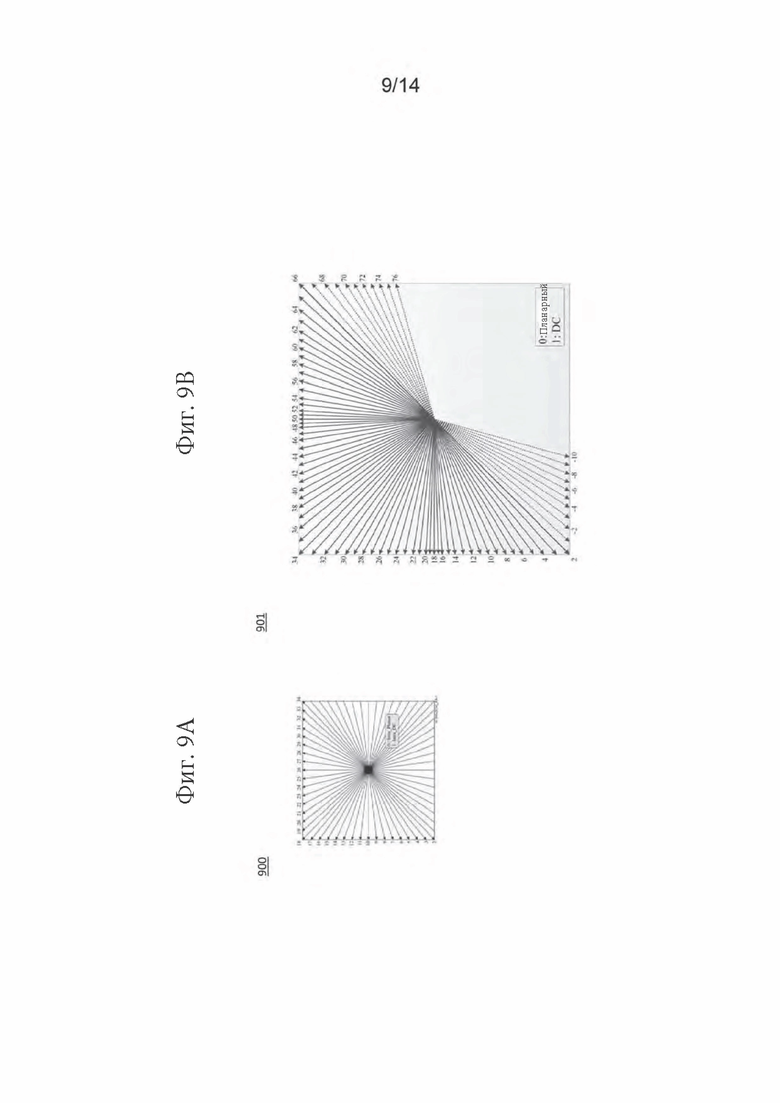
[74] На фиг. 9А показаны режимы 900 внутреннего предсказания, используемые в HEVC. В HEVC имеется всего 35 режимов внутреннего предсказания, среди которых режим 10 - горизонтальный режим, режим 26 - вертикальный режим, а режим 2, режим 18 и режим 34 - диагональные режимы. Режимы внутреннего предсказания сигнализируются посредством трех наиболее вероятных режимов (МРМ) и 32 оставшихся режимов.
[75] На фиг. 9 В показано, что в вариантах осуществления изобретения VVC всего 87 режимов внутреннего предсказания, где режим 18 - горизонтальный режим, режим 50 - вертикальный режим, а режим 2, режим 34 и режим 66 - диагональные режимы. Режимы -1~-10 и режимы 67~76 называются режимами широкоугольного внутреннего предсказания (WAIP, Wide-Angle Intra Prediction).
[76] Отсчет предсказания pred(x,y), расположенный в позиции (х, у), предсказывается с использованием режима внутреннего предсказания (DC, планарный, угловой) и линейной комбинации опорных отсчетов согласно выражению PDPC:
pred(x,y)=(wL × R-1,y+wT × Rx,-1 - wTL × R-1,-1+(64 - wL - wT+wTL) × pred(x,y)+32) >> 6,
где Rx,-1, R-l,y представляют опорные отсчеты, расположенные сверху и слева от текущего отсчета (х, у), соответственно, a R-1,-1 представляет опорный отсчет, расположенный в верхнем левом углу текущего блока.
[77] Для режима DC веса рассчитываются следующим образом для блока с шириной и высотой:
wT=32 >> ((у<<1) >> nScale), wL=32 >> ((х<<1) >> nScale), wTL=(wL>>4)+(wT>>4),
где nScale=(log2(width) - 2+log2(height) - 2+2) >> 2, wT обозначает весовой коэффициент для опорного отсчета, расположенного в опорной линии выше с той же горизонтальной координатой, wL обозначает весовой коэффициент для опорного отсчета, расположенного в левой опорной линии с той же вертикальной координатой, а wTL обозначает весовой коэффициент для верхнего левого опорного отсчета текущего блока, nScale указывает, насколько быстро весовые коэффициенты уменьшаются вдоль оси (wL уменьшается слева направо, a wT уменьшается сверху вниз), то есть скорость уменьшения весового коэффициента, и эта скорость одинакова вдоль оси х (слева направо) и оси у (сверху вниз) в текущем проекте. 32 обозначает начальные весовые коэффициенты для соседних отсчетов, причем исходный весовой коэффициент также является верхним (левым или верхним левым) весом, назначенным верхнему левому отсчету в текущем блоке СВ, и весовые коэффициенты соседних отсчетов в процессе PDPC должны быть равны или меньше этого начального весового коэффициента.
[78] Для планарного режима wTL=0, в то время как для горизонтального режима wTL=wT, а для вертикального режима wTL=wL. Веса PDPC могут быть вычислены только путем сложения и сдвига. Значение pred(x, у) можно вычислить за один шаг, используя формулу (1).
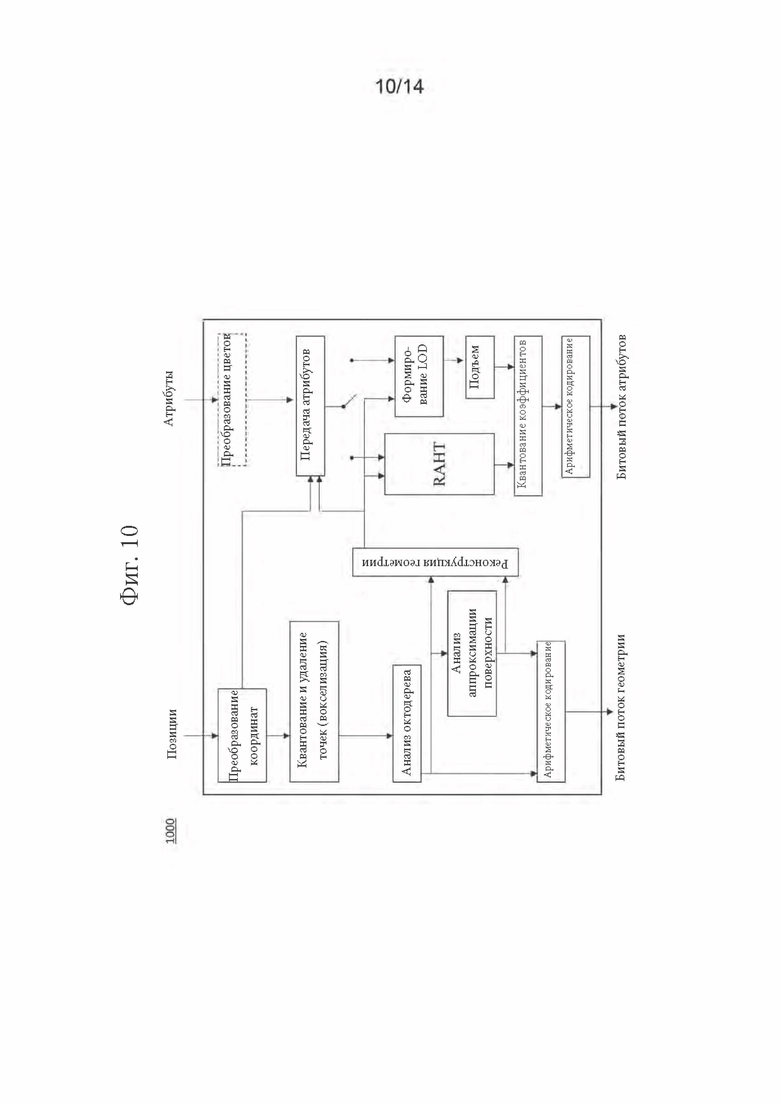
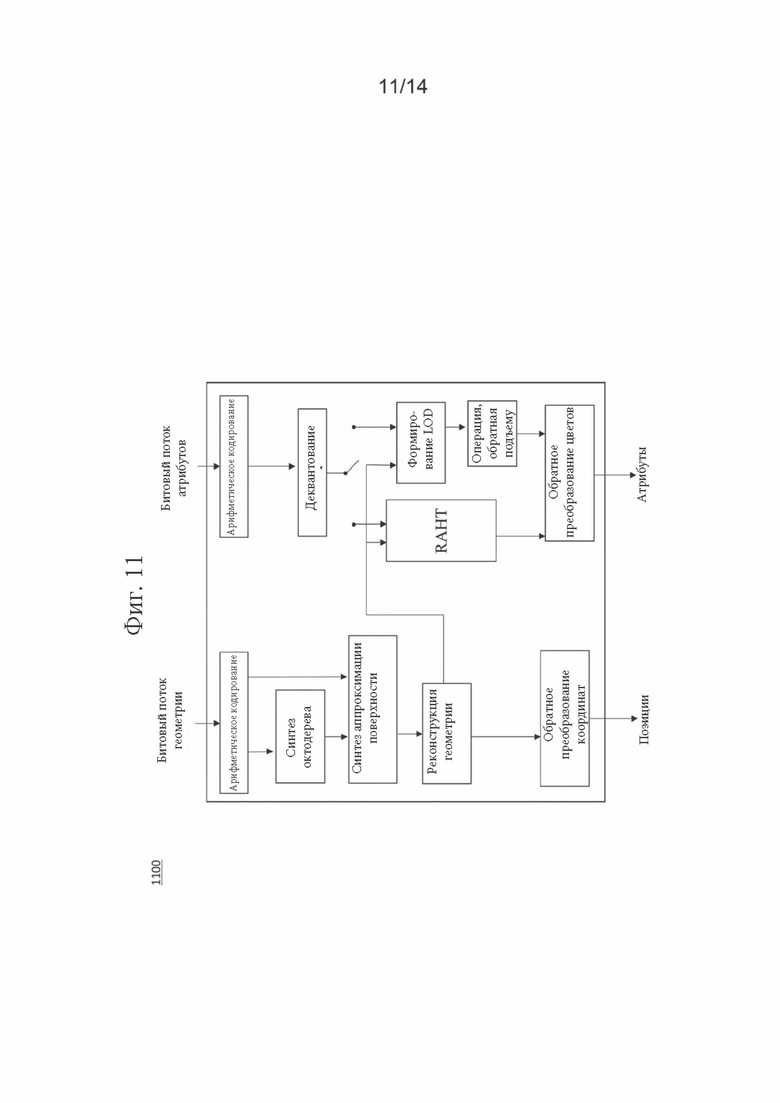
[79] Фиг. 10 и 11 представляют собой упрощенные структурные схемы 1000 и 1100 соответственно в соответствии с вариантами осуществления изобретения и обеспечивают другой обзор кодера и декодера сжатия облака точек на основе геометрии (G-PCC). Как в кодере, так и в декодере сначала кодируются положения облака точек. Кодирование атрибутов зависит от декодированной геометрии. На фиг. 10 и 11 модули адаптивного иерархического преобразования области (RAHT, region adaptive hierarchical transform) и аппроксимации поверхности являются опциями, обычно используемыми для данных категории 1. Формирование уровня детализации (LOD, level of detail) и модули подъема (lifting) - это опции, обычно используемые для данных категории 3. Все остальные модули являются общими для категорий 1 и 3.
[80] Для данных категории 3 сжатая геометрия может быть представлена как октодерево от корня до листового уровня отдельных вокселей. Для данных категории 1 сжатая геометрия может быть представлена сокращенным октодеревом (то есть октодеревом от корневого до листового уровня блоков, больших, чем воксели) и моделью, которая аппроксимирует поверхность в пределах каждого листового узла сокращенного октодерева. Таким образом, данные категории 1 и 3 совместно используют механизм кодирования на основе октодерева, тогда как данные категории 1 могут дополнительно аппроксимировать воксели в каждом листовом узле с помощью модели поверхности. Используемая модель поверхности представляет собой триангуляцию, использующую 1-10 треугольников на блок, в результате чего получается треугольная сетка. Поэтому геометрический кодек категории 1 известен как геометрический кодек треугольной сетки, а геометрический кодек категории 3 известен как геометрический кодек октодерева.
[81] В G-PCC существует три способа кодирования атрибутов: кодирование RAHT, иерархическое предсказание ближайшего соседа на основе интерполяции (преобразование с предсказанием) и иерархическое предсказание ближайшего соседа на основе интерполяции с этапом обновления/подъема (преобразование с подъемом). RAHT и подъем обычно используются для данных категории 1, в то время как предсказание обычно используется для данных категории 3. Однако любой способ может использоваться для любых данных, и, как в случае с геометрическими кодеками в G-PCC, пользователь имеет возможность выбрать, какой из 3 кодеков атрибутов он хотел бы использовать.
[82] Согласно примерам осуществления изобретения, геометрия может сначала кодироваться без потерь до уровня, указанного пользователем, с использованием кодирования на основе октодерева. Затем более мелкие детали геометрии могут быть аппроксимированы с потерями с использованием набора (известного как сетка) треугольников. Отдельный набор треугольников может быть получен в каждом листовом узле октодерева, которые в совокупности аппроксимируют поверхность (многообразие), проходящую через соответствующий куб. Чтобы создать сетку, для каждого ребра куба может быть получена одна вершина, что означает, что в нашем распоряжении есть не более 12 вершин для аппроксимации поверхности. Гладкие поверхности можно достаточно хорошо смоделировать, используя 12 доступных свободных параметров; однако может случиться так, что многообразие будет слишком сложным для моделирования с использованием этого ограниченного числа свободных параметров. По существу, примеры осуществления изобретения обобщают технологию треугольной сетки, принятую в MPEG/G-PCC, для решения этой проблемы, и для предлагаемого обобщенного кодирования с использованием треугольной сетки также используется схема оптимизации «скорость-искажения» (RDO).
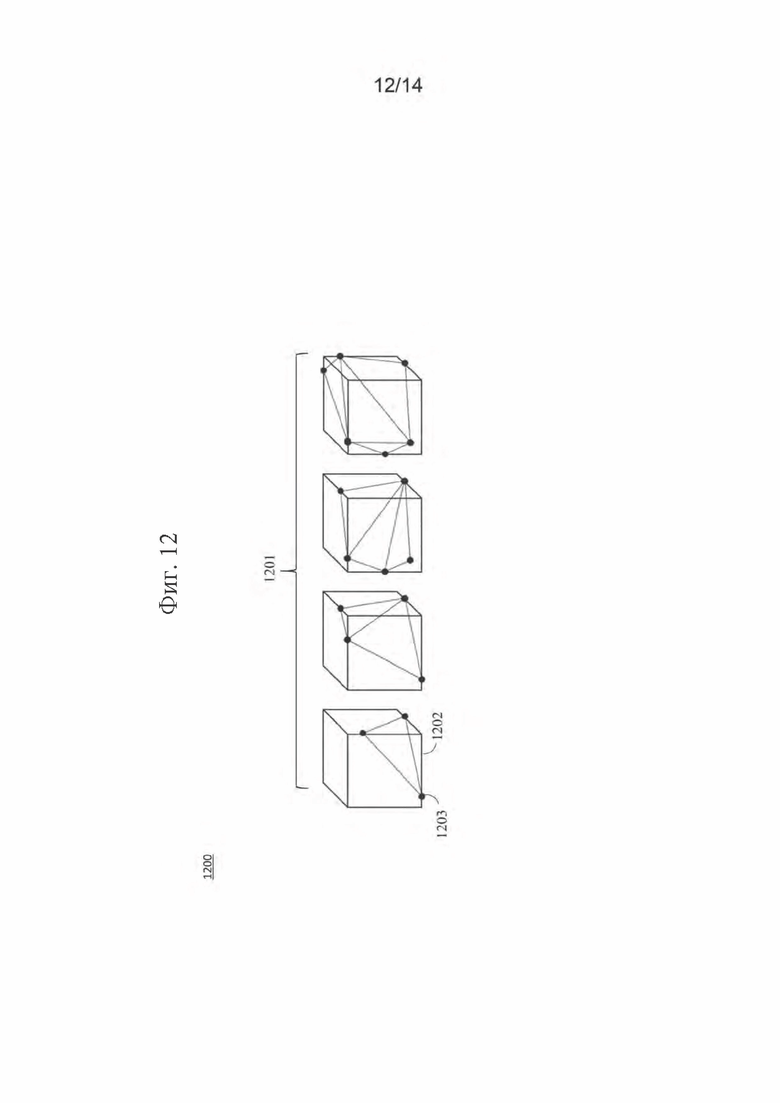
[83] Предлагаемые способы можно использовать по отдельности или комбинировать в любом порядке. Кроме того, каждый из способов (или вариантов осуществления изобретения) кодера и декодера может быть реализован схемой обработки (например, одним или более процессорами или одной или более интегральными схемами). В одном примере один или более процессоров исполняют программу, которая хранится на машиночитаемом носителе.
[84] Фиг. 12 представляет собой упрощенную иллюстрацию 1200 в соответствии с вариантами осуществления изобретения и показывает примеры 1201 созданных треугольных сеток на листовых узлах. Для каждого уникального ребра, такого как ребро 1202 среди других, показанных в примерах 1201, может кодироваться флаг, указывающий, имеет ли оно вершину, такую как вершина 1203 среди других, или нет. Если у ребра есть вершина, положение вершины вдоль этого ребра также может кодироваться. Каждому ребру может быть разрешено иметь не более одной вершины согласно примерам осуществления изобретения.
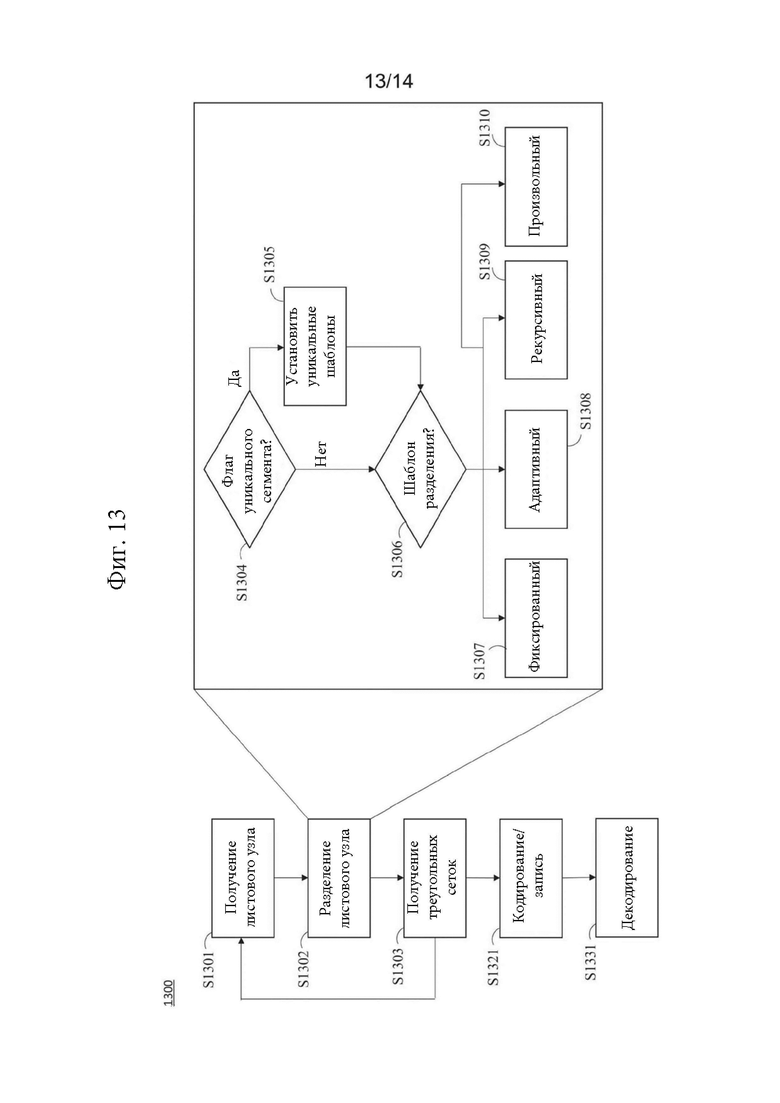
[85] Фиг. 13 представляет собой упрощенную иллюстрацию 1300 последовательности операций в соответствии с вариантами осуществления изобретения, и следует понимать, что одна или более функций могут использоваться отдельно от одной или более других проиллюстрированных функций и/или в другом порядке.
[86] Согласно примерам осуществления изобретения, на этапе S1301 получают один или более листовых узлов, а на этапе S1302 создают две или более треугольные сетки в каждом листовом узле. Это предпочтительно для лучшего моделирования многообразия, которое слишком сложно для моделирования с использованием только одной треугольной сетки. Для этого на этапе S1302 сначала выполняют разделение каждого листового узла на два или более прямоугольных/квадратных кубоида меньшего размера. Затем на этапе S1303 может быть получена отдельная треугольная сетка для каждого сформированного кубоида. Разделение листового узла на более мелкие кубоиды вводит новый набор угловых точек, а также новый набор ребер. Например, ребро листового узла может быть разделено пополам, что, следовательно, создает одну новую угловую точку между конечными точками этого ребра, а также заменяет ребро двумя более короткими новыми ребрами в соответствии с примерами осуществления изобретения, при этом может использоваться фиксированный шаблон разделения для всех листовых узлов, и/или, как дополнительно описано ниже, шаблон разделения может быть получен адаптивно для каждого листового узла и, соответственно, может быть сигнализирован.
[87] Согласно примерам осуществления изобретения, как показано на фиг. 13, этап S1302 может включать один или более этапов S1304-S1310. Например, на этапе S1306 может сигнализироваться шаблон разделения каждого листового узла, и согласно вариантам осуществления изобретения стратегия может заключаться в том, чтобы сигнализировать только 2 бита для каждого листового узла для указания шаблона разделения:
00 => нет разделения (1 треугольная сетка)
01 => разделение листового узла пополам вдоль оси х (2 треугольные сетки)
10 => разделение листового узла пополам вдоль оси у (2 треугольные сетки)
11 => разделение листового узла пополам вдоль оси z (2 треугольные сетки)
[88] Такой шаблон разделения может энтропийно кодироваться и записываться на этапе S1321 в конечный битовый поток. Могут быть разработаны и приняты различные схемы разделения. Если количество принятых шаблонов разделения равно N, то необходимо [log2 N] битов, чтобы сигнализировать шаблон для каждого листового узла.
[89] Также согласно одному или более примерам осуществления изобретения треугольные сетки могут быть получены рекурсивно на этапе S1309 в каждом листовом узле. Для каждого кубоида могут сигнализироваться три бита, обозначенные xyz, на каждом уровне разделения. Например, на уровне 0 разделения листовой узел может быть разделен восемью способами:
xyz=000 => без разделения (1 треугольная сетка)
xyz=001 => разделение листового узла пополам вдоль оси х (2 треугольные сетки)
xyz=010 => разделение листового узла пополам вдоль оси у (2 треугольные сетки)
xyz=011 => разделение листового узла пополам вдоль оси z (2 треугольные сетки)
xyz=100 => разделение листового узла пополам вдоль осей х и у (4 треугольные сетки)
xyz=101 => разделение листового узла пополам вдоль осей х и z (4 треугольные сетки)
xyz=110 => разделение листового узла пополам вдоль осей у и z (4 треугольные сетки)
xyz=111 => разделение листового узла пополам вдоль осей х, у и z (8 треугольных сеток).
[90] Аналогичным образом, на уровне 1 разделения могут потребоваться три дополнительных бита, чтобы сигнализировать шаблон разделения в каждом кубоиде, сформированном на уровне 0. Эти биты могут энтропийно кодироваться и записываться в битовый поток на этапе S1321.
[91] Также согласно одному или более примерам осуществления изобретения, разделение в вариантах осуществления изобретения на этапах S1306 и S1309 может выполняться в произвольном местоположении вдоль конкретной оси. В таком случае (таких случаях) для каждого кубоида также может сигнализироваться местоположение разделения для каждой оси. На любом уровне разделения, если количество вокселей вдоль конкретной оси равно L, то необходимо [log2L] битов для сигнализации местоположения разделения вдоль этой оси. Эти биты энтропийно кодируются и записываются в битовый поток на этапе S1321.
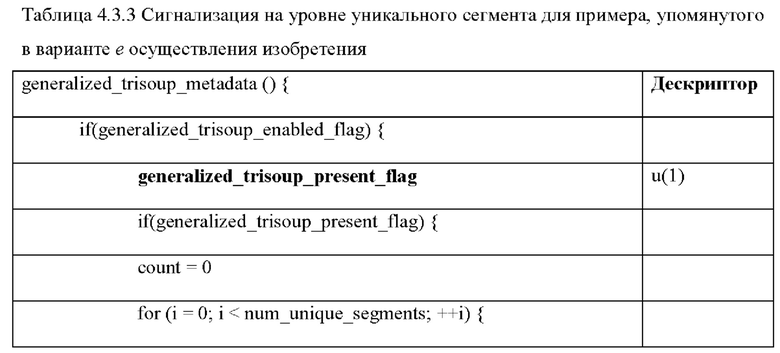
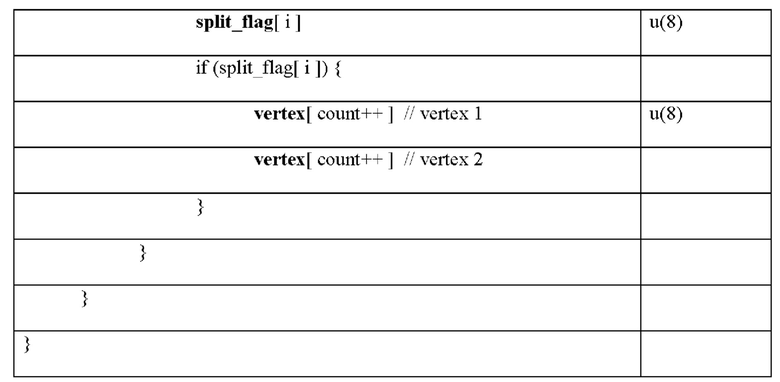
[92] Также согласно одному или более примерам осуществления изобретения, набор флагов разделения, соответствующий набору уникальных сегментов, может сигнализироваться на этапе S1304. Например, каждому листовому узлу или одному или более из листовых узлов может быть разрешено разделение только в одном направлении (например, х, у или z) или вообще не разрешено разделение в соответствии с флагами. Такие примеры можно легко обобщить на произвольные шаблоны разделения, вдоль произвольного числа осей, в произвольных местоположениях, рекурсивным способом. Например, если разделение разрешено только в середине сегмента, для каждого уникального сегмента сигнализируется флаг, указывающий, разделен ли этот сегмент или нет. Если флаг выключен, для этого уникального сегмента сигнализируется не более одной вершины. Если флаг включен, для этого уникального сегмента сигнализируются две вершины. Зная набор разделенных и неразделенных сегментов листового узла, декодер, например, на этапе S1331 может легко определить ось, вдоль которой этот листовой узел разделен, и сформировать либо 1, либо 2, либо 0 треугольных сеток.
[93] Кроме того, согласно одному или более примерам осуществления изобретения, на этапе S1321 в кодере может использоваться схема RDO (оптимизация «скорость-искажения») для определения оптимального шаблона разделения. Такой кодер может использовать любую из множества стратегий, чтобы найти оптимальный вариант разделения. В примерах осуществления изобретения Ω обозначает набор опций разделения, которые должны быть проверены кодером. Для каждой опции ω ∈ Ω кодер получает поверхность, которая является объединением всех треугольников треугольных сеток, сформированных с помощью этой опции разделения, и обозначена Т(ω). По заданной T(ω) кодер может вычислить искажение D (ω) между некодированными точками и реконструированными точками (реконструированные точки формируются с использованием T(ω) и этапа триангуляции, за которым следует этап повышающей дискретизации). Оптимальная опция разделения вычисляется следующим образом:

где R (ω) скорость кодирования, а λ - множитель Лагранжа.
Кроме того, вычисление искажения (для каждой опции разделения) с использованием общих геометрических метрик может быть дорогостоящим в вычислительном отношении. Кодер может использовать менее сложные способы за счет уменьшения выигрыша от кодирования. Согласно примерам осуществления изобретения, могут применяться вычисление искажения D(ω) как среднего расстояния некодированных точек от поверхности Т(ω), раннее завершение, чтобы остановить разделение, если количество точек, включенных в кубоид, становится ниже определенного порога, и/или предпочтение разделений, формирующих кубоиды с большей плотностью точек.
[94] Согласно примерам осуществления изобретения, конкретный шаблон разделения (полученный рекурсивно или нерекурсивно) среди набора доступных шаблонов разделения может сигнализироваться для каждого листового узла, где каждое разделение всегда делит кубоидное ребро пополам, как в таблице 4.3.1, однако разделение может быть выполнено в произвольных местоположениях, как показано в таблице 4.3.2.
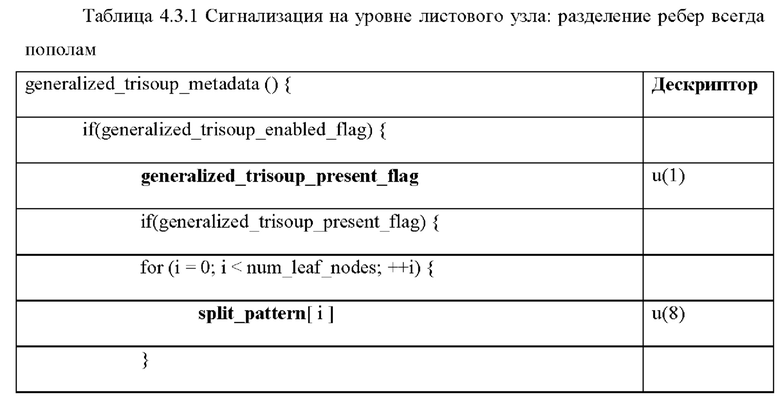

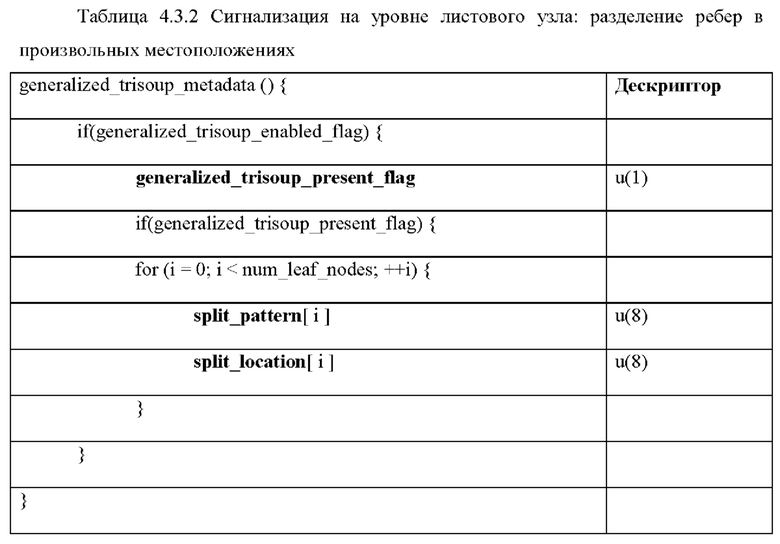
[95] В соответствии с примерами осуществления изобретения с учетом приведенных выше таблиц используется следующая семантика: generalized_trisoup_present_flag указывает, используется ли обобщенное кодирование с треугольной сеткой или нет, split_pattern[i] указывает битовый шаблон, который определяет шаблон разделения листового узла i, и если разделение выполняется рекурсивно, split_pattern[i] кратен 3, что соответствует осям х, у и z, и/или split_location[i] указывает местоположение разделения. В соответствии с каждой 1 в split_pattern[i] сигнализируется местоположение разделения размером  битов, где L обозначает количество вокселей.
битов, где L обозначает количество вокселей.
Кроме того, на этапе S1331 может выполняться процесс декодирования, включающий сигнализацию на уровне ведущего узла, при этом входными данными для этого процесса могут быть шаблон разделения, соответствующий листовому узлу, и/или местоположение разделения для каждого шаблона разделения (если ребра разрешено разделять в произвольных местоположениях).
[96] Таким образом, если ребра разрешено разделять только пополам, декодер декодирует шаблон разделения для каждого листового узла и создает отдельную треугольную сетку для каждого кубоида, используя декодированные вершины, а если ребра разрешено разделять в произвольных местоположениях, шаблон разделения и местоположения разделения декодируются для каждого листового узла. Для данного шаблона разделения и местоположения разделения, декодер тем самым создает набор треугольных сеток.
[97] Кроме того, согласно примерам осуществления изобретения, на этапе S1331, в отношении особенностей флага уникального сегмента (этап S1304), входными данными для процесса сигнализации на одном или более уровнях уникального сегмента могут быть поток флагов разделения для каждого уникального сегмента и/или поток вершин.
[98] Таким образом, для каждого уникального сегмента декодер может декодировать флаг разделения, и если флаг разделения равен 1, декодер может затем декодировать две вершины из потока вершин, а для листового узла, как только определен набор разделенных и неразделенных сегментов, декодер может определить ось, вдоль которой разделяется листовой узел. Затем декодер может либо создать 1 или 2 треугольные сетки для этого узла, либо вообще не формировать треугольную сетку.
[99] Соответственно, с помощью описанных здесь вариантов осуществления изобретения могут быть успешно решены указанные выше технические проблемы.
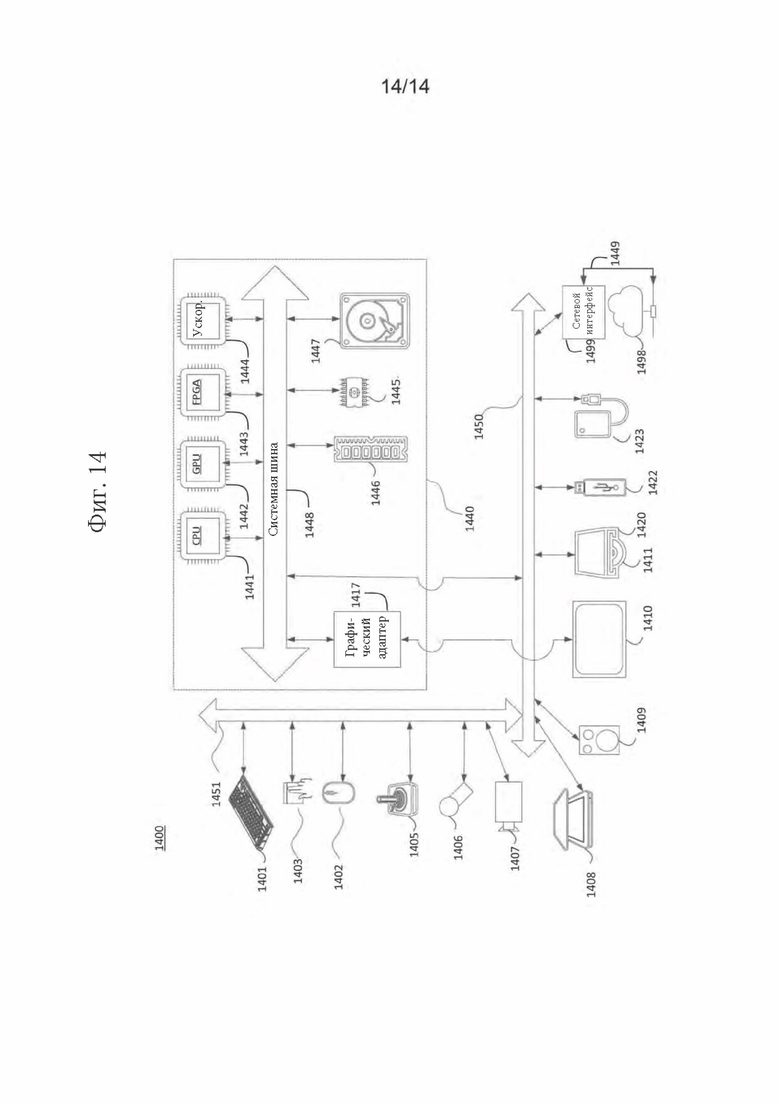
[100] Вышеописанные способы могут быть реализованы в виде компьютерного программного обеспечения, использующего машиночитаемые инструкции и физически хранящегося на одном или более машиночитаемых носителях или посредством сконфигурированных одного или более аппаратных процессоров. Например, на фиг. 14 показана компьютерная система 1400, пригодная для осуществления некоторых вариантов осуществления изобретения.
[101] Компьютерное программное обеспечение может кодироваться с использованием любого подходящего машинного кода или компьютерного языка, который может подвергаться ассемблированию, компиляции, редактированию связей или аналогичной обработке для создания кода, содержащего инструкции, которые могут выполняться напрямую или посредством интерпретации, выполнения микрокода и т.п., компьютерными центральными процессорами (CPU, central processing units), графическими процессорами (GPU, Graphics Processing Units) и т.п.
[102] Инструкции могут выполняться на компьютерах различных типов или их компонентах, включая, например, персональные компьютеры, планшетные компьютеры, серверы, смартфоны, игровые устройства, устройства интернета вещей и т.п.
[103] Компоненты компьютерной системы 1400, показанные на фиг. 14, носят иллюстративный характер и не призваны налагать какое-либо ограничение на объем применения или функциональные возможности компьютерного программного обеспечения, реализующего варианты осуществления настоящего изобретения. Конфигурацию компонентов также не следует интерпретировать как имеющую какую-либо зависимость или требование в связи с любым компонентом или комбинацией компонентов, показанных в примере осуществления компьютерной системы 1400.
[104] Компьютерная система 1400 может включать некоторые устройства ввода с человеко-машинным интерфейсом. Такое устройство ввода может отвечать за ввод одним или более пользователями посредством, например, тактильного ввода (например, нажатий на клавиши, махов, движений информационной перчатки), аудио-ввода (например, голосового, хлопков), визуального ввода (например, жестов), обонятельного ввода (не показан). Устройства интерфейса также могут использоваться для захвата некоторых информационных носителей, не обязательно напрямую связанных с осознанным вводом человеком, например звука (например, речи, музыки, внешнего звука), изображений (например, отсканированных изображений, фотографических изображений, полученных от камеры неподвижных изображений), видео (например, двумерного видео, трехмерного видео, включая стереоскопическое видео).
[105] Входной человеко-машинный интерфейс устройства может включать одно или более из следующего (показано по одному): клавиатура 1401, мышь 1402, сенсорная панель 1403, сенсорный экран 1410, джойстик 1405, микрофон 1406, сканер 1408 и камера 1407.
[106] Компьютерная система 1400 также может включать в себя некоторые устройства вывода с человеко-машинным интерфейсом. Такие устройства вывода могут стимулировать органы чувств одного или более пользователей посредством, например, тактильного вывода, звука, света и запаха/вкуса. Такие устройства вывода могут включать устройства тактильного вывода (например, тактильной обратной связи посредством сенсорного экрана 1410 или джойстика 1405, а также устройства тактильной обратной связи, которые не служат устройствами ввода), устройства вывода аудио (например: динамики 1409, наушники (не показаны)), устройства визуального вывода (например, экраны 1410, в том числе CRT-экраны, LCD-экраны, плазменные экраны, OLED-экраны, каждый с возможностями сенсорного экранного ввода или без них, каждый с возможностями тактильной обратной связи или без них, некоторые из них способны к двумерному визуальному выводу или более чем трехмерному выводу посредством, например, стереографическому выводу, очки виртуальной реальности (не показаны), голо графические дисплеи, дымовые баки (не показаны) и принтеры (не показаны).
[107] Компьютерная система 1400 также может включать доступные человеку запоминающие устройства и связанные с ними носители, например, оптические носители, включающие CD/DVD ROM/RW 1420 с носителями 1411 CD/DVD и т.п., карты 1422 флэш-памяти, сменный жесткий диск или твердотельный диск 1423, традиционные магнитные носители, например, ленту и магнитный диск (не показан), специализированные устройства на основе ROM/ASIC/PLD, например, защитные аппаратные ключи (не показаны) и т.п.
[108] Специалисты в данной области техники также должны понимать, что термин «машиночитаемые носители», используемый в связи с настоящим изобретением, не охватывает среды передачи, несущие волны или другие временные сигналы.
[109] Компьютерная система 1400 также может включать интерфейс 1499 к одной или более сетям 1498 связи. Сети 1498 могут быть, например, беспроводными, проводными, оптическими. Сети 1498 могут быть также локальными, глобальными, городскими, транспортными и промышленными, реального времени, допускающими задержку и т.д. Примеры сетей 1498 включают локальные сети, например, Ethernet, беспроводные сети LAN, сотовые сети, в том числе GSM, 3G, 4G, 5G, LTE и т.п., глобальные цифровые сети проводного или беспроводного телевидения, в том числе кабельное телевидение, спутниковое телевидение и наземное телевещание, транспортные и промышленные сети, включающие CANBus и т.д. Некоторые сети 1498 обычно требуют внешних адаптеров сетевого интерфейса, которые подключены к некоторым портам данных общего назначения или периферийным шинам 1450 и 1451 (например, USB-порты компьютерной системы 1400); другие обычно встраиваются в ядро компьютерной системы 1400 путем подключения к системной шине, как описано ниже (например, интерфейс Ethernet в компьютерную систему PC или интерфейс сотовой сети в компьютерную систему смартфона). Используя любую из этих сетей 1498, компьютерная система 1400 может осуществлять связь с другими объектами. Такая связь может быть однонаправленной с возможностью только приема (например, телевещания), однонаправленной с возможностью только передачи (например, CANbus к некоторым устройствам CANbus) или двунаправленной, например, к другим компьютерным системам с использованием локальной или глобальной цифровой сети. Некоторые протоколы и стеки протоколов могут использоваться в каждой из этих сетей и вышеописанных сетевых интерфейсов.
[110] Вышеупомянутые устройства человеко-машинного интерфейса, доступные человеку запоминающие устройства и сетевые интерфейсы могут подключаться к ядру 1440 компьютерной системы 1400.
[111] Ядро 1440 может включать один или более центральных процессоров (CPU) 1441, графические процессоры (GPU) 1442, графические адаптеры 1417, специализированные программируемые модули обработки в форме вентильных матриц, программируемых пользователем (FPGA, Field Programmable Gate Arrays) 1443, аппаратные ускорители 1444 для некоторых задач и т.д. Эти устройства, совместно с постоянной памятью (ROM) 1445, оперативной памятью 1446, внутренним хранилищем данных большой емкости, например, внутренними жесткими дисками, недоступными пользователю, SSD и т.п.1447, могут соединяться посредством системной шины 1448. В некоторых компьютерных системах системная шина 1448 может быть доступна в форме одного или более физических разъемов для обеспечения расширений за счет дополнительных процессоров CPU, GPU и т.п. Периферийные устройства могут подключаться либо напрямую к системной шине 1448 ядра, либо через периферийную шину 1451. Архитектуры периферийной шины включают PCI, USBht.h.
[112] Устройства CPU 1441, GPU 1442, FPGA 1443 и ускорители 1444 могут выполнять некоторые инструкции, которые совместно могут составлять вышеупомянутый компьютерный код. Этот компьютерный код может храниться в памяти ROM 1445 или RAM 1446. Временные данные также могут храниться в памяти RAM 1446, тогда как постоянные данные могут храниться, например, во внутреннем хранилище 1447 данных большой емкости. Быстрое сохранение и извлечение из любого запоминающего устройства может обеспечиваться за счет использования кэшпамяти, которая может быть тесно связана с одним или более процессорами CPU 1441, GPU 1442, хранилищем 1447 данных большой емкости, памятью ROM 1445, RAM 1446 и т.п.
[113] На машиночитаемых носителях может храниться компьютерный код для осуществления различных выполняемых компьютером операций. Носители и компьютерный код могут быть специально созданы в целях настоящего изобретения или могут относиться к хорошо известным и доступным специалистам в области компьютерного программного обеспечения.
[114] В порядке примера, но не ограничения изобретения, компьютерная система, имеющая архитектуру 1400, и, в частности, ядро 1440 может обеспечивать функциональные возможности благодаря выполнению процессором(ами) (включающим(и) в себя CPU, GPU, FPGA, ускорители и т.п.) программного обеспечения, воплощенного в одном или более материальных машиночитаемых носителей. Такие машиночитаемые носители могут быть носителями, связанными с доступным пользователю хранилищем данных большой емкости, представленным выше, а также некоторым постоянным хранилищем ядра 1440, например, внутренним хранилищем 1447 данных большой емкости или ROM 1445. Программное обеспечение, реализующее различные варианты осуществления настоящего изобретения, может храниться в таких устройствах и выполняться ядром 1440. Машиночитаемый носитель может включать одно или более запоминающих устройств или микросхем, в соответствии с конкретными нуждами. Программное обеспечение может предписывать ядру 1440 и, в частности, его процессорам (включая CPU, GPU, FPGA и т.п.) выполнять конкретные способы или конкретные части описанных здесь конкретных способов, включая задание структур данных, хранящихся в памяти RAM 1446, и модификацию таких структур данных согласно способам, заданным программным обеспечением. Дополнительно или альтернативно, компьютерная система может обеспечивать функциональные возможности благодаря логике, зашитой или иным образом воплощенной в схеме (например, ускоритель 1444), которая может действовать вместо программного обеспечения или совместно с программным обеспечением для выполнения конкретных способов или конкретных частей описанных здесь конкретных способов. Ссылка на программное обеспечение может охватывать логику, и наоборот, когда это уместно. Ссылка на машиночитаемые носители может охватывать схему (например, интегральную схему (IС, integrated circuit)), где хранится программное обеспечение для выполнения, схему, воплощающую логику для выполнения, или обе схемы, когда это уместно. Настоящее изобретение охватывает любую подходящую комбинацию аппаратного и программного обеспечения.
[115] Хотя здесь были описаны некоторые варианты осуществления изобретения, возможны изменения, перестановки и различные эквивалентные замены в пределах объема изобретения. Таким образом, специалисты в данной области техники могут предложить многочисленные системы и способы, которые, хотя в явном виде здесь не показаны и не описаны, воплощают принципы изобретения и, таким образом, соответствуют его сущности и объему.

Изобретение относится к технологиям кодирования облака точек и, в частности, к сжатию геометрии облака точек, включая обобщение сжатия MPEG/G-РСС с потерями с использованием треугольной сетки и быструю схему оптимизации «скорость-искажения» (RDO). Техническим результатом является уменьшение объема данных, требуемых для представления облака точек. Предложены способ и устройство, содержащее компьютерный код для выполнения процессором, получения листового узла данных сжатия облака точек на основе геометрии (G-PCC), разделения листового узла на множество кубоидов, получения отдельных треугольных сеток для каждого кубоида и кодирования множества флагов соответственно для каждого из ребер каждого кубоида, при этом множество флагов указывает, присутствуют ли вершины отдельных треугольных сеток на ребрах из упомянутых ребер. 3 н. и 9 з.п. ф-лы, 14 ил.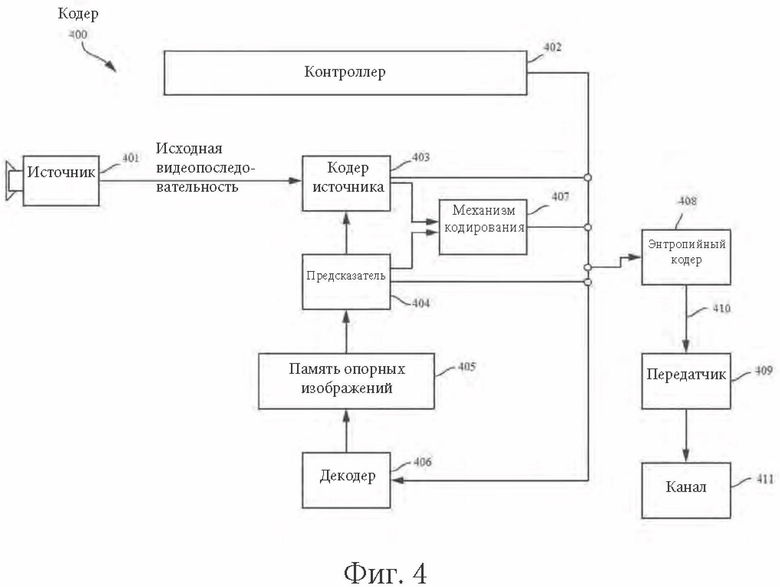
1. Способ кодирования видеоданных, выполняемый по меньшей мере одним процессором и включающий:
получение листового узла данных сжатия облака точек на основе геометрии (G-РСС);
определение шаблона разделения согласно схеме оптимизации «скорость-искажения» (RDO) по следующей формуле:

где ω* представляет упомянутый шаблон разделения, Ω представляет множество вариантов разделения, которые должны быть проверены кодером, ω представляет вариант разделения, принадлежащий Ω, R(ω) представляет скорость кодирования, λ представляет множитель Лагранжа, a D(ω) представляет искажение, вычисленное кодером, при этом искажение включает:
(а) искажение между некодированными точками и реконструированными точками, причем реконструированные точки формируют на основе поверхности Т(ω), полученной кодером, и триангуляции с последующей повышающей дискретизацией, при этом упомянутая поверхность является объединением всех треугольных сеток, сформированных с помощью варианта разделения; или
(б) среднее расстояние некодированных точек от поверхности Т(ω);
разделение листового узла на множество кубоидов на основе упомянутого шаблона разделения;
получение отдельных треугольных сеток для каждого кубоида и
кодирование множества флагов соответственно для каждого из ребер каждого кубоида,
при этом множество флагов указывает, присутствуют ли вершины отдельных треугольных сеток на ребрах из упомянутых ребер.
2. Способ по п. 1, в котором первые из флагов указывают на наличие вершин отдельных треугольных сеток на ребрах, а вторые из флагов указывают на отсутствие вершин на ребрах.
3. Способ по п. 1 или 2, также включающий:
энтропийное кодирование сигнализации упомянутого шаблона разделения листового узла посредством двух битов,
при этом два бита указывают, разделен ли листовой узел на кубоиды пополам вдоль одной из осей х, у и z.
4. Способ по п. 3, в котором местоположение, в котором листовой узел разделен вдоль по меньшей мере одной из осей х и у, сигнализируют для каждого из кубоидов.
5. Способ по п. 1 или 2, также включающий:
рекурсивное получение треугольных сеток в листовом узле среди множества листовых узлов данных G-PCC.
6. Способ по п. 5, также включающий:
энтропийное кодирование сигнализации упомянутого шаблона разделения листового узла посредством трех битов,
при этом три бита указывают, разделен ли листовой узел на кубоиды пополам вдоль одной из осей х, у и z, комбинации осей х и у, комбинации осей х и z, комбинации осей у и z, а также комбинации осей х, у и z.
7. Способ по п. 6, в котором местоположение, в котором листовой узел разделен вдоль по меньшей мере одной из осей х, у и z, сигнализируют для каждого из кубоидов.
8. Способ по п. 7, также включающий:
определение того, установлен ли для листового узла флаг, указывающий по меньшей мере одно направление, вдоль которого листовой узел не может быть разделен.
9. Способ по любому из пп. 1-8, в котором разделение листового узла на множество кубоидов включает разделение листового узла пополам.
10. Способ по любому из пп. 1-8, в котором разделение листового узла на множество кубоидов включает разделение листового узла на части неравного размера.
11. Устройство для кодирования видеоданных, содержащее:
по меньшей мере одну память, сконфигурированную для хранения компьютерного программного кода;
по меньшей мере один процессор, сконфигурированный для доступа к компьютерному программному коду и работы в соответствии с инструкциями компьютерного программного кода для осуществления способа по любому из пп. 1-10.
12. Машиночитаемый носитель, хранящий программу, сконфигурированную для обеспечения выполнения компьютером способа по любому из пп. 1-10.
| KHALED MAMMOU еt al, G-PCC codec description v2, ISO/IEC JTC1/SC29/WG11 Сoding of moving pictures and audio, N18189, Marrakech, January 2019 | |||
| WO 2019011637 A, 2019.01.17 | |||
| WO 2019055772 A, 2019.03.21 | |||
| US 10192353 B1, 2019.01.29 | |||
| US 2017214943 A1, 2017.07.27 | |||
| US 2017347122 A1, 2017.11.30 | |||
| УСТРОЙСТВА И СПОСОБЫ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ИЗОБРАЖЕНИЯ HDR | 2012 |
|
RU2589871C2 |

