Изобретение относится к измерительной технике в области неразрушающего контроля роторных машин и может быть использовано для мониторинга технического состояния вращающего вала по параметрам крутильных колебаний. Мониторинг параметров крутильных колебаний обеспечивает оперативную оценку напряженно-деформированного состояния вала при кручении, что позволяет контролировать опасные уровни крутильной вибрации вплоть до выдачи сигнала останова роторной машины, раннее обнаружение дефектов указанных машин, например, усталостных трещин вала. Применение изобретения обеспечивает повышение надежности роторных машин и агрегатов, включая турбоагрегаты электростанций.
Применяемые для этих целей средства и способы измерения крутильных колебаний описаны в статье [1] (Назолин А.Л., Поляков В.И., Гнездилов С.Г. Диагностика целостности валопроводов мощных турбоагрегатов по крутильным колебаниям // Теплоэнергетика, №1, - 2020. С. 32-43.). Все эти способы и средства используют бесконтактные системы контроля угловых перемещения вала, включающие в себя установленные на вал информационные и опорные маркеры угловых положений вала, а также датчики угловых маркеров вала, установленные неподвижно вне вала и регистрирующие прохождение маркеров угловых положений вала. В качестве информационных и опорных маркеров угловых положений вала используются зубцы установленного на вал зубчатого колеса, лопатки турбинного колеса, светоотражательные метки, прорези в установленном на вал измерительном диске. В качестве датчиков угловых маркеров вала используют вихретоковые, индукционные, емкостные, оптические и другие типы датчиков, чувствительные к прохождению маркеров угловых положений вала.
Параметры крутильных колебаний определяют путем обработки сигнала датчика угловых маркеров вала, например, методом измерения временных интервалов прохождения маркеров угловых положений вала, описанным в упомянутой выше статье [1]. При этом для компенсации ошибки, вызванной погрешностью углового положения информационных маркеров относительно опорного, применяют маску углового положения маркеров вала, которую определяют в режиме работы роторной машины или агрегата без торсионного возбуждения, например, в режим холостого хода турбоагрегата, когда крутильные колебания малы либо отсутствуют. Маска углового положения маркеров вала представляет собой оценку углового положения информационных маркеров вала относительно опорного маркера. Необходимость и возможность определения маски углового положения маркеров вала в режиме вращения вала без торсионного возбуждения известна и предложена J.M. Vance в работе [2] (J.M. Vance, Rotordynamics of Turbomachinery, Wiley, New York, 1988 pp. 379-383). При этом на точность измерения параметров крутильных колебаний вала с помощью датчика угловых маркеров вала кроме погрешности углового положения информационных маркеров вала влияют и другие паразитные факторы.
Так, в статье [1] и работе [3] (Морозов А.Н., Назолин А.Л. Динамические системы с флуктуирующим временем. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2001. - 197 с.) показано, что сигнал датчика угловых маркеров вала помимо крутильных колебаний содержит паразитную информацию о неравномерном угловом положении информационных маркеров угловых положений вала, поперечном сдвиге и перемещении вала, вибрации датчика угловых маркеров вала. Паразитные факторы искажают сигнал крутильных колебаний с датчика угловых маркеров вала, вызывая наибольшие погрешности измерения крутильных колебаний на частотах вынужденных крутильных колебаний. Поэтому важным направлением развития методики измерения крутильных колебаний бесконтактным методом является повышение точности измерения параметров крутильных колебаний за счет учета различных вариантов влияния паразитных факторов.
Наиболее близка к заявляемому система и способ определения характеристик крутильных колебаний вращающегося вала по Патенту РФ №2523044 [4]. Здесь предложено для повышения точности измерения параметров крутильных колебаний с помощью датчиков угловых маркеров вала выполнять компенсацию влияния на результат измерения параметров крутильных колебаний паразитных поперечных колебаний вала и паразитных поперечных колебаний датчиков угловых маркеров вала посредством установки в измерительной плоскости, образованной установленным на вал зубчатым колесом, двух датчиков угловых маркеров вала под углом 180 градусов друг к другу, выходы которых подключены в аппаратно-программному блоку для преобразования и математической обработки сигналов датчиков угловых маркеров вала. Тем не менее, это не обеспечивает, как показано в [1], достаточной для диагностирования точности контроля параметров собственных частот крутильных колебаний вала и достоверной оценки амплитуд гармоник вынужденных частот крутильных колебаний вала в стационарных режимах работы турбоагрегата.
Контроль параметров крутильных колебаний по способу [4] имеет недостатки, обусловленные допущениями, лежащими в основе симметричной расчетной схемы измерения. Во-первых, контроль параметров крутильных колебаний ведется при допущении, что угловые перемещения вала по каждому датчику угловых маркеров вала равны друг другу. На практике это не так, так как информационные импульсы двух датчиков угловых маркеров вала из-за неточности их установки и (или) неравномерного углового положения маркеров по окружности вала приходят не одновременно, как принято в расчетах, а в разные моменты времени. Во-вторых, датчики угловых маркеров вала устанавливаются в разных местах статора работающей машины, поэтому их паразитные поперечные колебания относительно вала, в общем случае, не равны друг другу, что не учитывается в расчетах. В-третьих, при неточной установке двух датчиков под углом 180 градусов и (или) неравномерном угловом положении маркеров по окружности вала значения периодов по датчикам угловых маркеров вала будут отличаться, что также не учитывается в расчетах.
Этих недостатков лишены предлагаемые в настоящем изобретении варианты Устройства и Способа мониторинга крутильных колебаний вращающегося вала роторной машины или агрегата, так как в них в каждой измерительной плоскости используется не два, а один датчик угловых маркеров вала и дополнительно один или несколько датчиков положения вала и (или) датчик вибрации датчика угловых маркеров вала, сигналы которых используются для определения и регистрации параметров крутильных колебаний. При этом датчики положения вала следует располагать как можно ближе к измерительной плоскости датчика угловых маркеров вала, лучше в самой измерительной плоскости.
Целью изобретения и его техническим результатом является повышение точности измерения параметров крутильных колебаний вала для повышения достоверности оценки напряженно-деформированного состояния вала и раннего обнаружения его дефектов, например, усталостных трещин вала на работающем роторном агрегате на начальном этапе их развития для предотвращения аварийного разрушения агрегата.
Поставленная цель достигается уточнением значений параметров крутильных колебаний вала, определяемых по сигналу датчика угловых маркеров вала, путем математической корректировки значений параметров крутильных колебаний вала с использованием значений параметров сигналов дополнительных измерений, а именно: поперечного перемещения вала (первый вариант) и (или) вибрации датчика угловых маркеров вала (второй вариант). Выбор первого и (или) второго варианта реализации Устройства и Способа мониторинга крутильных колебаний вращающегося вала определяется особенностями динамики и функционирования роторной машины или агрегата, от которых зависит возможность пренебрежения влиянием различных паразитных факторов на результат измерения параметров крутильных колебаний вала по сигналу датчика угловых маркеров вала.
В первом варианте реализации известное устройство мониторинга крутильных колебаний вала, содержащее установленный на вал по меньшей мере в одной измерительной плоскости информационные и опорный маркеры угловых положений вала, датчик угловых маркеров вала, установленный вне вала в каждой измерительной плоскости, а также соединенный с указанным датчиком измерительно-вычислительный блок крутильных колебаний (ИВБ КК) для определения и регистрации параметров крутильных колебаний вращающегося вала, дополнительно оснащают по меньшей мере одним датчиком поперечного перемещения вала, установленным в каждой измерительной плоскости и подключенным к указанному выше ИВБ КК для уточнения значений параметров крутильных колебаний вала. Большая точность измерения параметров крутильных колебаний достигается в схеме измерения, в которой в одной измерительной плоскости устанавливают два датчика поперечного перемещения вала под углом 180 градусов друг к другу и под углом 90 градусов по отношения к датчику угловых маркеров вала за счет компенсации влияния на результат измерения поперечных перемещений вала перемещений, перпендикулярных оси расположения двух датчиков поперечного перемещения. Одновременно с измерением параметров сигнала датчика угловых маркеров вала дополнительно измеряют параметры поперечного перемещения вала и используют эти дополнительные измерения для уточнения значений параметров крутильных колебаний вала путем математической корректировки значений параметров сигнала датчика угловых маркеров вала. Так, корректировка значений угла поворота опорного маркера вала, определяемого по параметрам сигнала датчика угловых маркеров вала, например, по формуле

где Т0 - текущее значение периода вращения вала по опорному маркеру вала, ti - интервал времени между моментами регистрации импульсов опорного и - го информационного маркеров вала, N - число информационных маркеров вала, может быть осуществлена, например, по формуле

где ϕ(ti) - уточненная зависимость угла поворота вала от времени, по которой можно, например, рассчитать все параметры крутильных колебаний вала известными математическим методами, R1 - радиус расположения информационных маркеров по окружности вала, x1(ti) - значение поперечного перемещения вала из положения, занимаемого в момент регистрации импульса опорного маркера, в положение, занимаемое в момент регистрации импульса - го информационного маркера. Уточнение значений параметров крутильных колебаний вала на основе дополнительных измерений может быть выполнено в программе ИВБ КК.
На фиг. 1 (а, б) представлена блок-схема Устройства мониторинга крутильных колебаний вращающегося вала, обеспечивающего реализацию первого варианта заявленного Способа. Устройство включает в себя установленный на вал ротора 1 измерительный диск 2 с информационными маркерами угловых положений вала 3 в виде однотипных прорезей, расположенный на указанном измерительном диске опорный маркер угловых положений вала 4 в виде прорези с большими размерами и установленный вне вала датчик угловых маркеров вала 5, например, оптический датчик, включающий в себя источник оптического излучения 5.1 и фотоэлектрический преобразователь 5.2. Выход датчика угловых маркеров вала 5 присоединен к входу 6.1 ИВБ КК 6 для определения и регистрации параметров крутильных колебаний вращающегося вала. Для контроля поперечных перемещений вала в районе установки измерительного диска 2 под углом 90 градусов к датчику угловых маркеров вала установлен один датчик поперечного перемещения вала 7.1 (фиг. 1, а) или два датчика поперечного перемещения вала 7.1 и 7.2 (фиг. 1, б), например, вихретоковые. Датчики поперечного перемещения вала установлены под углом 180 градусов друг к другу и под углом 90 градусов к датчику угловых маркеров вала 5. Датчики поперечного перемещения вала подключены к входам 6.2.1 и 6.2.2 ИВБ КК 6.
Во втором варианте реализации известное устройство мониторинга крутильных колебаний вала, содержащее установленный на вал, по меньшей мере в одной измерительной плоскости, информационные и опорный маркеры угловых положений вала, датчик угловых маркеров вала, установленный вне вала в каждой измерительной плоскости, а также соединенный с указанным датчиком ИВБ КК для определения и регистрации параметров крутильных колебаний вращающегося вала, дополнительно оснащают датчиком вибрации датчика угловых маркеров вала, подключенными к указанному ИВБ КК для уточнения значений параметров крутильных колебаний вала. Одновременно с измерением параметров сигнала датчика угловых маркеров вала дополнительно измеряют параметры вибрации датчика угловых маркеров вала и используют эти дополнительные измерения для уточнения значений параметров крутильных колебаний вала путем корректировки значений параметров сигнала датчика угловых маркеров вала. Так, корректировка значений угла поворота опорного маркера вала (1) в моменты регистрации импульсов информационных маркеров вала ti может быть осуществлена, например, по формуле

где R1 - расстояние от оси вращения вала до датчика угловых маркеров вала, х2(ti) - значение поперечного перемещения датчика угловых маркеров вала из положения, занимаемого в момент регистрации импульса опорного маркера, в положение, занимаемое в момент регистрации импульса - го информационного маркера. Уточнение значений параметров крутильных колебаний вала на основе дополнительных измерений может быть выполнено в программе ИВБ КК.
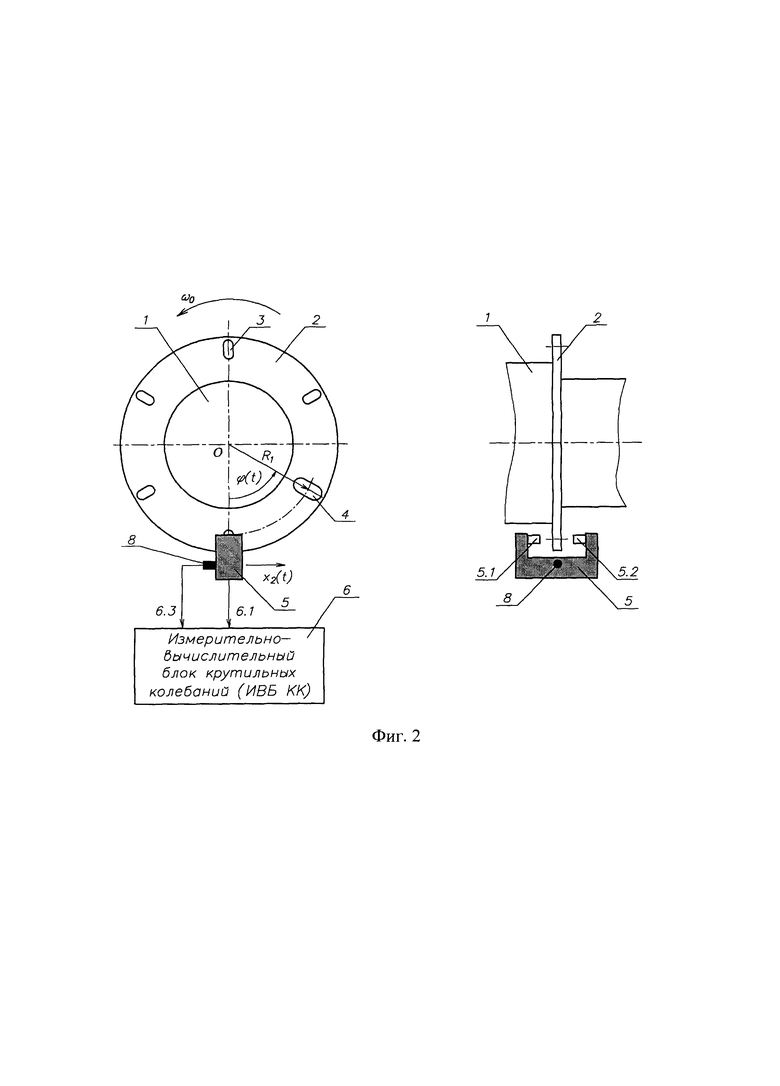
На фиг. 2 представлена блок-схема Устройства мониторинга крутильных колебаний вращающегося вала, обеспечивающего реализацию второго варианта заявленного Способа. Устройство включает в себя установленный на вал ротора 1 измерительный диск 2 с информационными маркерами угловых положений вала 3 в виде однотипных прорезей, расположенный на указанном измерительном диске опорный маркер угловых положений вала 4 в виде прорези с большими размерами и установленный вне вала датчик угловых маркеров вала 5, например, оптический датчик, включающий в себя источник оптического излучения 5.1 и фотоэлектрический преобразователь 5.2. Выход датчика угловых маркеров вала 5 присоединен к входу 6.1 ИВБ КК 6 для определения и регистрации параметров крутильных колебаний вращающегося вала. Для контроля вибрации датчика угловых маркеров вала 5 на него установлен датчик вибрации 8, подключенный к входу 6.3 ИВБ КК 6.
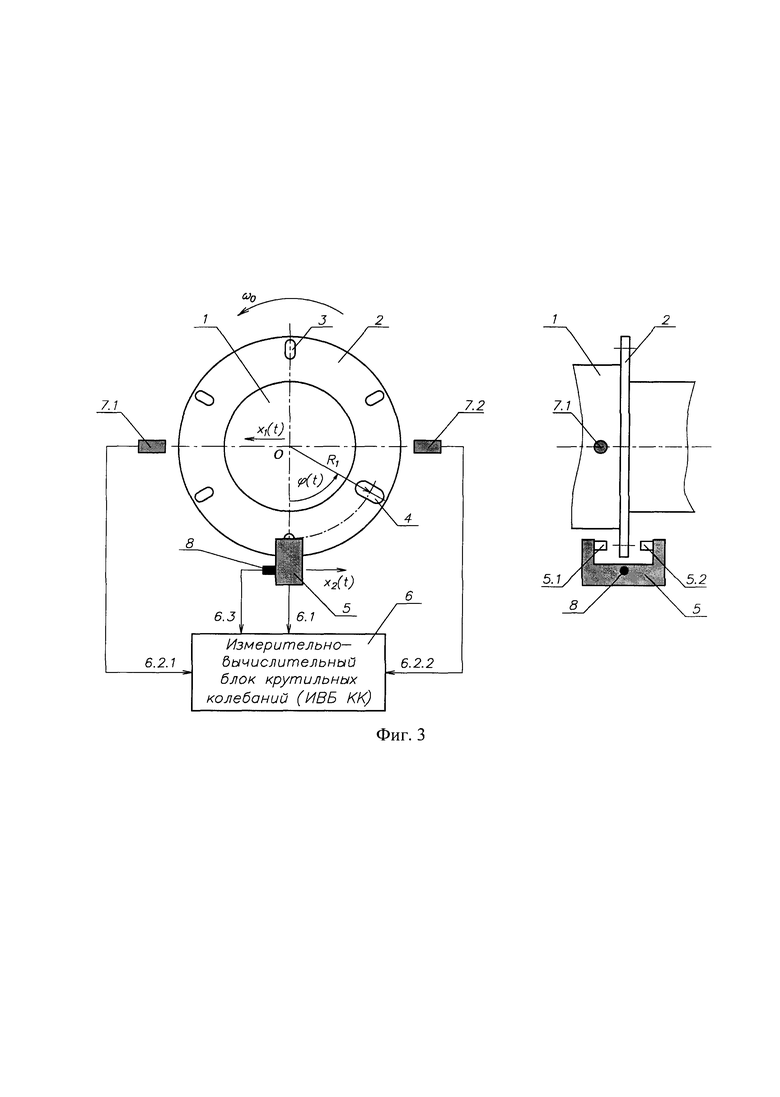
На фиг. 3 представлена блок-схема Устройства мониторинга крутильных колебаний вращающегося вала, обеспечивающего наилучшую точность измерения параметров крутильных колебаний за счет реализации двух вариантов заявленного способа.
Например, в составе энергоблока, состоящего из паровой турбины и синхронного турбогенератора, предлагаемое на фиг. 3 Устройство и Способ работает следующим образом. Вращение вала турбоагрегата 1 и установленного на нем измерительного диска 2 приводит к модуляции оптического потока, направленного от источника оптического излучения 5.1 к фотоэлектрическому преобразователю 5.2 датчика угловых маркеров вала 5. Под воздействием переменного оптического потока фотоэлектрический преобразователь 5.2 датчика 5, например, оптический датчик ПТК «МОДЕРО» ООО НТЦ «Ресурс» [1], вырабатывает последовательность импульсных сигналов, которые поступают на вход 6.1 модуля измерения временных интервалов в составе ИВБ КК 6 для определения и регистрации параметров крутильных колебаний вращающегося вала. ИВБ КК 6 состоит из модуля измерения временных интервалов, например, интерфейсной платы измерения временных интервалов ПТК «МОДЕРО» ООО НТЦ «Ресурс» [1], модуля сбора данных и вычислительного устройства, например, одноплатного компьютера с подсистемой сбора данных Athena IV «Diamonds Systems Corporations». Под управлением вычислительного устройства модуль измерения временных интервалов в реальном масштабе времени осуществляет преобразование импульсного сигнала датчика угловых маркеров вала в цифровой код и запись значений временных интервалов следования импульсов в память вычислительного устройства. Одновременно с этим, по измерительным каналам вибрации в составе датчиков перемещения вала, например, вихретоковых проксиметров АЕ052 ООО «ГлобалТест» и датчика вибрации, например, вибропреобразователя перемещения D100 ООО «ГлобалТест», подключенным к входам 6.2.1, 6.2.2 и 6.3 модуля сбора данных в составе ИВБ КК 6 в память вычислительного устройства поступают данные измерений параметров поперечного перемещения вала 1 и параметров вибрации датчика угловых маркеров вала 5. Синхронизация момента запуска регистрации всех сигналов и контроль целостности данных в режиме мониторинга осуществляется по сигналу опорного маркера.
Используя поступающие данные, вычислительное устройство ИВБ КК 6 по программе без участия человека-оператора автоматически определяет параметры крутильных колебаний вала по сигналу датчика угловых маркеров вала, например, угол поворота опорного маркера вала  в моменты регистрации импульсов информационных маркеров вала по формуле (1), и выполняет уточнение значений параметров крутильных колебаний посредством математической компенсации погрешностей, определяемых по результатам измерения параметров поперечных перемещений вала 1 и параметров вибрации датчика угловых маркеров вала 5, например, по формуле
в моменты регистрации импульсов информационных маркеров вала по формуле (1), и выполняет уточнение значений параметров крутильных колебаний посредством математической компенсации погрешностей, определяемых по результатам измерения параметров поперечных перемещений вала 1 и параметров вибрации датчика угловых маркеров вала 5, например, по формуле

Уточненные значения параметров крутильных колебаний вала записываются, например, в файл на носитель информации вычислительного устройства ИВБ КК 6 и предоставляются для анализа человеку-оператору и (или) в автоматизированную систему управления технологическим процессом (АСУТП) роторного агрегата.
Для оценки параметров крутильных колебаний и угла закрутки вала между сечениями Устройство, представленное на фиг. 1 (а, б), фиг. 2 или фиг. 3, дополнительно устанавливается на другом участке вала. Измерения параметров крутильных колебаний с помощью датчиков угловых маркеров вала проводят одновременно по меньшей мере в двух измерительных плоскостях, а значения параметров поперечных перемещений вала и (или) параметров вибрации датчика угловых маркеров вала в измерительных плоскостях используют для уточнения значений параметров крутильных колебаний и угла закрутки вала между измерительными плоскостями путем корректировки значений параметров сигналов датчиков угловых маркеров вала. Так, в варианте реализации Устройства и Способа мониторинга крутильных колебаний вращающегося вала, представленном на фиг. 4, сигналы датчиков, установленных в измерительных плоскостях П. 1, П. 2 и П. 3, поступают в ИВБ КК 6 для определения, например, уточненных значений углов поворота вала по формуле (4) и углов закрутки вала между измерительными плоскостями по формуле

где ϕn(t) и ϕm(t) - передискретизированные по времени значения временного ряда (4) в -ой и m-ой измерительной плоскости соответственно. Значения углов закрутки (5) используют, например, для мониторинга напряженно-деформированного состояния вала. Уточнение значений параметров крутильных колебаний вала и угла закрутки вала между измерительными плоскостями на основе дополнительных измерений может быть выполнено в программе ИВБ КК 6.
В режиме работы роторной машины или агрегата без торсионного возбуждения, например, в режим холостого хода турбоагрегата, когда крутильные колебания малы либо отсутствуют, измерение параметров крутильных колебаний вала с использованием вариантов заявленного Устройства и Способа обеспечивает уточненную оценку маски углового положения маркеров вала. Уточнение достигается за счет использования результатов дополнительных измерений параметров поперечных перемещений вала и (или) параметров вибрации датчика угловых маркеров вала путем корректировки значений параметров сигнала датчика угловых маркеров вала и математической обработки результатов измерений. Так, в варианте реализации Устройства, представленном на фиг. 3, уточненную оценку маски углового положения маркеров вала можно найти, например, по формуле

где <…> - оператор усреднения значений по числу оборотов вала В, Т0,k - значение периода вращения вала по опорному маркеру на -ом обороте вала, ti,k - интервал времени между моментом регистрации импульса i-го информационного маркера и моментом регистрации импульса опорного маркера на k-ом обороте вала, x1(ti,k) - значение поперечного перемещения вала из положения, занимаемого в момент регистрации импульса опорного маркера, в положение, занимаемое в момент регистрации импульса i-го информационного маркера, на -ом обороте вала, x2(ti,k) - значение поперечного перемещения датчика угловых маркеров вала из положения, занимаемого в момент регистрации импульса опорного маркера, в положение, занимаемое в момент регистрации импульса i-го информационного маркера, на k-ом обороте вала.
В режиме мониторинга параметров крутильных колебаний роторной машины или агрегата значения уточненной маски углового положения маркеров вала и результаты дополнительных измерений параметров поперечного перемещения вала и (или) параметров вибрации датчика угловых маркеров вала используют для уточнения значений параметров крутильных колебаний вала путем корректировки значений параметров сигнала датчика угловых маркеров вала. Так, в варианте реализации Устройства, представленном на фиг. 3, корректировка значений угла поворота опорного маркера вала  в моменты регистрации импульсов информационных маркеров вала ti может быть осуществлена, например, по формуле
в моменты регистрации импульсов информационных маркеров вала ti может быть осуществлена, например, по формуле

Уточнение значений параметров крутильных колебаний вала на основе дополнительных измерений может быть выполнено в программе ИВБ КК. Тем самым обеспечивается уточненная измерительная оценка и компенсация всех паразитных факторов, искажающих сигнал крутильных колебаний с датчика угловых маркеров вала, достигается цель и технический результат изобретения, заключающийся в повышение точности измерений параметров крутильных колебаний вала бесконтактным методом.

Изобретение относится к измерительной технике в области неразрушающего контроля роторных машин и может быть использовано для мониторинга технического состояния валов по параметрам крутильных колебаний. Реализация способа достигается уточнением значений параметров крутильных колебаний вала, определяемых по сигналу датчика угловых маркеров вала, путем математической корректировки значений параметров крутильных колебаний вала значениями параметров сигналов дополнительных измерений, определяемых в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала, а именно: поперечного перемещения вала (первый вариант) и (или) вибрации датчика угловых маркеров вала (второй вариант). Выбор первого и (или) второго вариантов реализации устройства и способа мониторинга крутильных колебаний вращающегося вала определяется особенностями динамики и функционирования роторной машины или агрегата. Устройство содержит установленные на вал измерительный диск, установленный вне вала датчик угловых маркеров вала и измерительно-вычислительный блок крутильных колебаний (ИВБ КК) для определения и регистрации параметров крутильных колебаний вращающегося вала. Дополнительно оснащают одним или двумя датчиками поперечного перемещения вала (первый вариант) и (или) датчиком вибрации датчика угловых маркеров вала (второй вариант), подключенными к ИВБ КК. Одновременно с измерением параметров сигнала датчика угловых маркеров вала дополнительно измеряют параметры сигналов датчиков поперечного перемещения вала и (или) параметры сигнала датчика вибрации датчика угловых маркеров вала в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала. Затем используют эти дополнительные измерения для уточнения значений параметров крутильных колебаний вала путем корректировки значений параметров сигнала датчика угловых маркеров вала. Для оценки параметров крутильных колебаний и угла закрутки вала между сечениями измерения параметров крутильных колебаний с помощью датчиков угловых маркеров вала проводят одновременно по меньшей мере в двух измерительных плоскостях, а значения параметров сигналов дополнительных измерений, определяемых в моменты обнаружения маркеров угловых положений вала датчиками угловых маркеров вала, а именно: поперечных перемещений вала и (или) параметров вибрации датчиков угловых маркеров вала в этих измерительных плоскостях, используют для уточнения значений параметров крутильных колебаний вала между сечениями и угла закрутки вала между сечениями. Технический результат заключается в повышении точности измерения параметров крутильных колебаний вала для повышения достоверности оценки напряженно-деформированного состояния вала и раннего обнаружения его дефектов. 4 н. и 5 з.п. ф-лы, 3 ил.
1. Устройство мониторинга крутильных колебаний вращающегося вала, содержащее установленные на вал по меньшей мере в одной измерительной плоскости информационные и опорный маркеры угловых положений вала, датчик угловых маркеров вала, установленный вне вала в каждой измерительной плоскости, а также соединенный с указанным датчиком измерительно-вычислительный блок для определения и регистрации параметров крутильных колебаний вращающегося вала, отличающееся тем, что дополнительно включает в себя подключенный к измерительно-вычислительному блоку для определения и регистрации параметров крутильных колебаний вращающегося вала по меньшей мере один датчик поперечного перемещения вала, установленный в каждой измерительной плоскости и измеряющий смещение вала в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала, параметры сигнала которого используются для уточнения значений параметров крутильных колебаний вала.
2. Устройство мониторинга крутильных колебаний вращающегося вала по п. 1, отличающееся тем, что включает в себя 2 датчика поперечного перемещения вала, установленных напротив друг друга под углом 180° и под углом 90° к датчику угловых маркеров вала.
3. Устройство мониторинга крутильных колебаний вращающегося вала, содержащее установленный на вал по меньшей мере в одной измерительной плоскости, информационные и опорный маркеры угловых положений вала, датчик угловых маркеров вала, установленный вне вала в каждой измерительной плоскости, а также соединенный с указанным датчиком измерительно-вычислительный блок для определения и регистрации параметров крутильных колебаний вращающегося вала, отличающееся тем, что дополнительно включает в себя подключенный к измерительно-вычислительному блоку для определения и регистрации параметров крутильных колебаний вращающегося вала по меньшей мере один датчик вибрации датчика угловых маркеров вала, измеряющий смещение датчика угловых маркеров вала в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала, параметры сигнала которого используются для уточнения значений параметров крутильных колебаний вала.
4. Способ мониторинга крутильных колебаний вращающегося вала, где измеряют параметры сигнала датчика угловых маркеров вала и определяют параметры крутильных колебаний вала с использованием результатов этих измерений, отличающийся тем, что с помощью датчика поперечного перемещения вала дополнительно измеряют параметры поперечного перемещения вала в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала и используют их для уточнения значений параметров крутильных колебаний вала.
5. Способ мониторинга крутильных колебаний вращающегося вала по п. 4, отличающийся тем, что измерения проводят по меньшей мере в двух измерительных плоскостях и используют их для уточнения значений параметров крутильных колебаний и угла закрутки вала между измерительными плоскостями.
6. Способ мониторинга крутильных колебаний вращающегося вала по п. 4, отличающийся тем, что измерения проводят в режиме вращения вала без торсионного возбуждения, используют их для уточнения значений углового положения информационных маркеров вала относительно опорного маркера и определяют параметры крутильных колебаний вала с использованием результатов этих измерений.
7. Способ мониторинга крутильных колебаний вращающегося вала, где измеряют параметры сигнала датчика угловых маркеров вала и определяют параметры крутильных колебаний вала с использованием результатов этих измерений, отличающийся тем, что с помощью датчика вибрации датчика угловых маркеров вала дополнительно измеряют параметры вибрации датчика угловых маркеров вала в моменты обнаружения маркеров угловых положений вала датчиком угловых маркеров вала и используют их для уточнения значений параметров крутильных колебаний вала.
8. Способ мониторинга крутильных колебаний вращающегося вала по п. 7, отличающийся тем, что измерения проводят по меньшей мере в двух измерительных плоскостях и используют их для уточнения значений параметров крутильных колебаний и угла закрутки вала между измерительными плоскостями.
9. Способ мониторинга крутильных колебаний вращающегося вала по п. 7, отличающийся тем, что измерения проводят в режиме вращения вала без торсионного возбуждения, используют их для уточнения значений углового положения информационных маркеров вала относительно опорного маркера и определяют параметры крутильных колебаний вала с использованием результатов этих измерений.
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК КРУТИЛЬНЫХ КОЛЕБАНИЙ ВРАЩАЮЩЕГОСЯ ВАЛА | 2013 |
|
RU2523044C1 |
| US 5734108 A1, 31.03.1998 | |||
| СИСТЕМА МОНИТОРИНГА КРУТИЛЬНЫХ КОЛЕБАНИЙ ВРАЩАЮЩЕГОСЯ ВАЛОПРОВОДА ТУРБОАГРЕГАТА | 2015 |
|
RU2582906C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 2001 |
|
RU2190198C1 |

