Изобретение относится к авиации, в частности к воздухоплаванию, а именно к устройству грузовой зоны дирижабля.
Интерес к проектированию и строительству аэростатических летательных аппаратов начал возрождается в мире с середины 60-х годов. Особое внимание при этом уделяется гибридным дирижаблям, сочетающим аэростатический и аэродинамический способы создания подъемной силы и способность к перевозке тяжелых крупногабаритных неделимых грузов.
Одним из первых реализованных проектов грузового гибридного дирижабля стал проект «Helistat», разработанный американской фирмой «Пясецки эйркрафт». Аппарат имел объем оболочки 28317 м3 и массу полезной нагрузки 23660 кг. Он представлял собой сложную конструкцию, сочетавшую мягкую оболочку дирижабля ZPG-2 с четырьмя вертолетными модулями от серийно выпускаемого вертолета SH-34Y. Модули были установлены на консолях двух поперечных балок ферменной конструкции, смонтированных под оболочкой. К ним предполагалось крепить троса системы внешней мягкой подвески перевозимых грузов.
Проведенные фирмой исследования показали, что в режиме висения система управления позволяет удерживать центр грузоподъемного устройства с точностью ±15 см над заданной точкой земной поверхности при ветре до 15 м/с.
Разработкой крупных гибридных дирижаблей, которые еще называют вертостатами занималась также японская фирма «Кавасаки Хэви индастриз». Ее проект был рассчитан на транспортировку грузов массой до 30 т и состоял из мягкой оболочки, к которой подвешивалась развитая ферменная силовая платформа с двумя поперечными балками. На концах балок в гондолах были попарно установлены восемь двигателей, приводящих в движение восемь несущих винтов. Снизу к платформе крепились четыре стойки шасси. Взлетная масса аппарата составляла 68 т, крейсерская скорость 100 км/ч, дальность 330 км.
Следует отметить и аппарат «Helicostat», разработанный французской фирмой «Аэроспасьяль» совместно с техническим центром лесной и деревообрабатывающей промышленности.
На территории бывшего СССР также проводилась большая работа различными творческими коллективами по созданию гибридных дирижаблей.
В Киевском ОКБВ разрабатывался проект гибридного дирижабля грузоподъемностью 20 т, предназначенного для выполнения транспортно-монтажных операций. Аппарат был спроектирован по полужесткой схеме и представлял собой соединение мягкой оболочки с жесткой килевой фермой и несущими винтами большого диаметра. Килевая ферма предназначена для поддержания формы мягкой оболочки в продольном направлении, восприятия аэродинамических, аэростатических и массовых нагрузок, а также для размещения и крепления всех жестких элементов аппарата, в том числе грузов. Одним из ее основных элементов является подмоторная ферма, на которой установлены вертолетные силовые установки. Крепление мягкой оболочки к килевой ферме осуществляется посредством тросов и катенарий по типу полужестких дирижаблей конструкции Нобиле.
В Московском авиационном институте (МАИ) в кооперации с другими организациями был разработан очень необычный проект дисковидного гибридного дирижабля (Термоплан) с максимальной грузоподъемностью 600 т.
В Московском институте инженеров гражданской авиации (МИИГА) с помощью программы расчета обликовых характеристик и анализа существующих проектов был выделен оптимальный типоразмерный ряд гибридных грузовых дирижаблей грузоподъемностью от 4 до 400 т. Полученный типоразмерный ряд явился результатом последовательного комбинирования трех типов аэродинамической схемы (однобаллонной, катамаранной и тримаранной) с различным количеством реальных несущих силовых установок от серийно выпускаемых вертолетов Ми-2, Ми-8, Ка-32 и Ми-26. Именно эта аналитическая работа была положена в основу предложений по проекту вертостата ВС-80. Проведенный в институте применения авиации в народном хозяйстве (ВНИИ ПАНХ ГА) анализ предполагаемых грузопотоков неделимых крупногабаритных грузов в экономике страны показал, что транспортировку основной массы этих грузов можно осуществить, создав вертостат катамаранного типа с двумя несущими винтами на базе винтомоторной установки вертолета Ми-26.
Отмечалось, что с точки зрения удобства размещения и крепления груза наиболее приспособленными являются катамаранные схемы компоновки вертостатов. Однако, это не всегда соответствует действительности, т.к. имеется однозначная зависимость аэродинамической схемы от массы грузов.
Кроме того, процесс установки и крепления грузов к дирижаблю в большинстве известных проектов требует наличия аэродромных технических средств для подъема груза в зону крепления на дирижабле. По другому варианту в некоторых проектах предполагалось установить на дирижабле механизмы с грузоподъемностью, достаточной для подъема груза с земли на борт. При этом не учитывалось, что такое решение приведет к существенному перетяжелению дирижабля из-за большой массы подобных механизмов. К тому же, совсем не просто крепить груз к бортовым силовым узлам после его подъема из-за затрудненных подходов, особенно в условиях наличия даже небольшого ветра, когда груз совершает микроперемещения относительно узлов навески.
Известен гибридный дирижабль, являющийся прототипом проекта ВС-80 (Ю.С. Бойко. «Воздухоплавание в изобретениях», 1999 г. стр. 285-287, Рис. 264), в котором две вертолетные винтомоторные установки расположены на ферме между бортами двух оболочек дирижабля катамаранного типа. По своей технической сущности этот дирижабль является наиболее близким аналогом предложенного устройства грузовой зоны и принят в качестве прототипа.
Полезная нагрузка у прототипа транспортируется только на внешней подвеске по жесткому или мягкому варианту. При жесткой подвеске груз крепится непосредственно к продольной ферме дирижабля с помощью бортовых средств крепления. При мягкой подвеске груз крепится на тросе (системе тросов) длиной 40-70 м и не ограничен в размерах. У прототипа на жесткой подвеске габариты груза ограничены в размерах расстоянием между баллонами и высотой фермы от земли.
Узлы крепления тросов, установленные на продольной балке позволяют, кроме перевозки полезной нагрузки на внешней подвеске (мягкой или жесткой), выполнять и монтажные операции.
Предусматривалось, что дирижабль будет подлетать на малой скорости к объекту транспортировки, зависать над площадкой и совершать посадку. После этого наземный персонал закрепляет груз с помощью тросов и расчалок. Несущие винты во время закрепления груза могут выключаться или работать на режиме малого газа двигателей. После закрепления груза по жесткому или мягкому варианту гибридный дирижабль увеличивает тягу несущих винтов, взлетает и выполняет полет с грузом в пункт назначения.
Проект имеет несколько существенных недостатков по грузовой зоне.
Дирижабль не может идеально точно совершить посадку над грузом. Опоры колес оставляют между фермой и грузом зазор как минимум в два-три десятка сантиметров, который надо как-то преодолевать, чтобы довести груз до упоров фермы и зафиксировать тросами. По жесткому варианту нельзя просто зацепить троса за узлы фермы без притягивания груза. Иначе он будет колебаться в полете с опасным смещением. Следовательно, необходимо иметь мощное наземное грузоподъемное устройство для приподнятия груза, или предусмотреть изменяемый клиренс у дирижабля, например, за счет длинноходовых амортизаторов шасси, что обеспечивает только вертикальную коррекцию положения дирижабля. Для коррекции горизонтального положения потребуется тягач, смещающий дирижабль в небольших пределах вперед-назад, влево-вправо.
В жестком варианте закрепления груза такое устройство грузовой зоны дирижабля осложняет прием, фиксацию и сдачу груза, увеличивает количество привлекаемого наземного персонала и снижает автономность грузового комплекса из-за зависимости от мощных наземных грузоподъемных механизмов.
Задачей изобретения является устройство грузовой зоны дирижабля таким образом, чтобы устранить трудоемкие операции по коррекции взаимного положения груза и дирижабля в процессе приема и сдачи груза, уменьшить количество привлекаемого к погрузке-выгрузке технического персонала, исключить потребность в мощной грузоподъемной наземной технике и повысить автономность использования грузового комплекса.
Задача изобретения решается тем, что дирижабль наделен способностью подруливать к грузу сверху, а на нижней поверхности корпуса дирижабля к силовым узлам килевой фермы прикреплены рельсы, которые снабжены электрическими тельферами, имеющими возможность перемещаться по рельсам в нужное положение под управлением оператора, причем тельферы в момент достаточности выпущенной длины своих тросов имеют возможность зацепления тросовых крюков за такелажные узлы груза и обладают способностью подтягивать зависший дирижабль к грузу до упоров на нижней поверхности дирижабля, где неизменность положения груза дополнительно обеспечена средствами его фиксации.
Полученный технический результат характеризуется следующим существенным признаком:
- дирижабль наделен способностью подруливать к грузу сверху, а на нижней поверхности корпуса дирижабля к силовым узлам килевой фермы прикреплены рельсы, которые снабжены электрическими тельферами, имеющими возможность перемещаться по рельсам в нужное положение под управлением оператора, причем тельферы в момент достаточности выпущенной длины своих тросов имеют возможность зацепления тросовых крюков за такелажные узлы груза и обладают способностью подтягивать зависший дирижабль к грузу до упоров на нижней поверхности дирижабля, где неизменность положения груза дополнительно обеспечена средствами его фиксации.
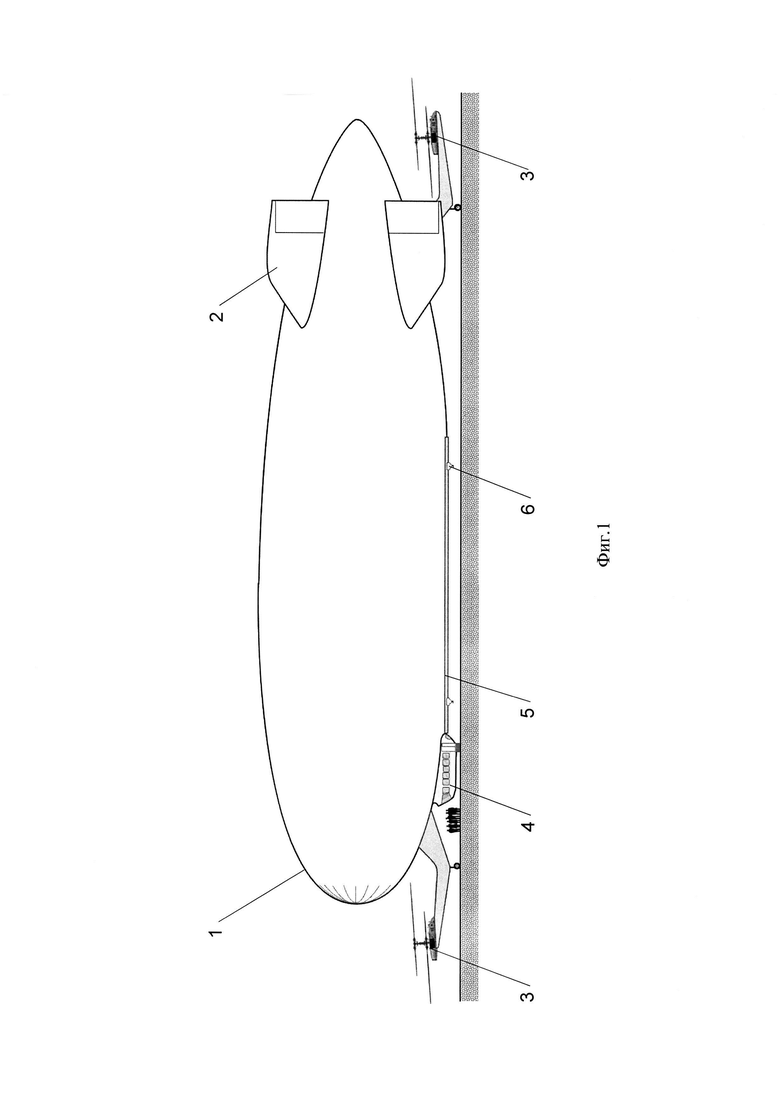
На Фиг. 1 показана компоновка грузовой зоны на дирижабле.
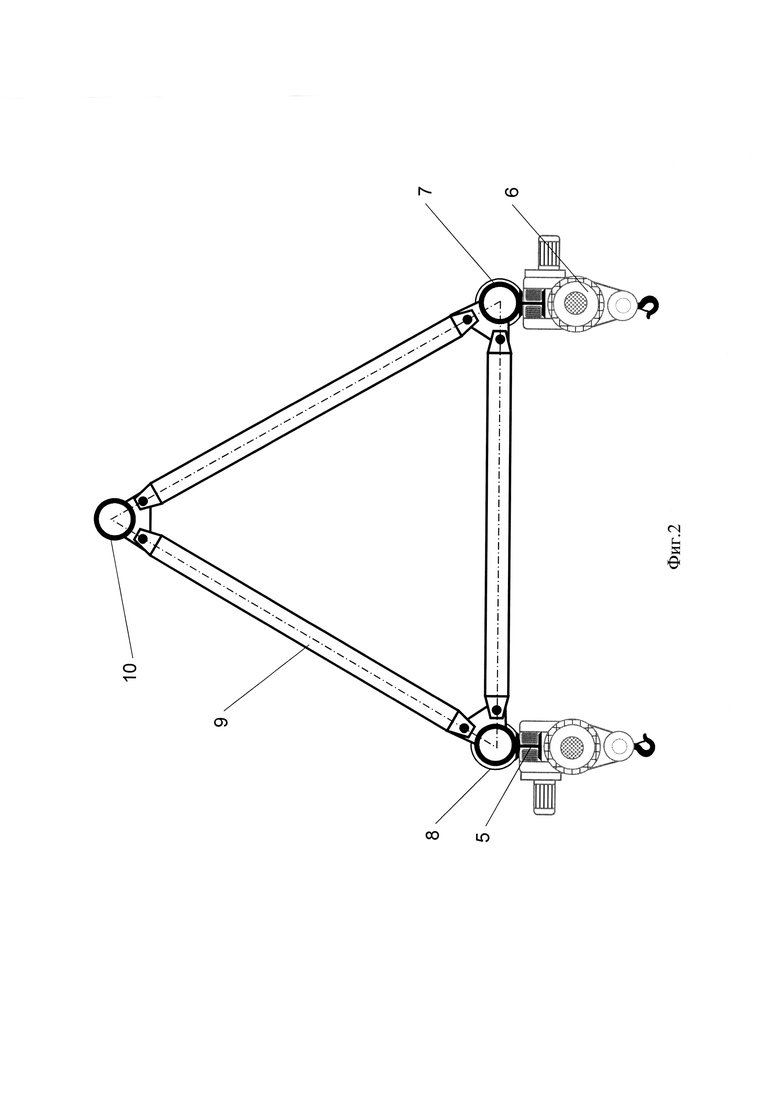
На Фиг. 2 показано сечение килевой балки дирижабля с двумя рельсами и тельферами на них.
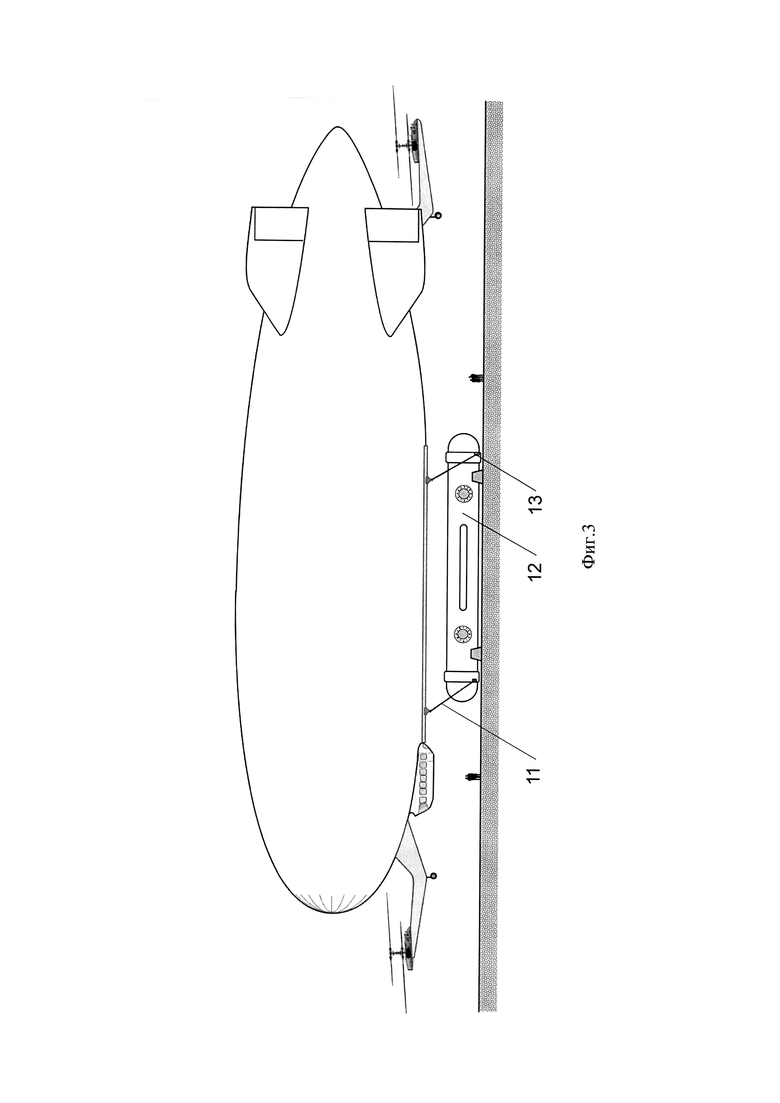
На Фиг. 3 показан момент подтягивания дирижабля к грузу при помощи тельферов, крюки которых зацеплены за такелажные узлы груза.
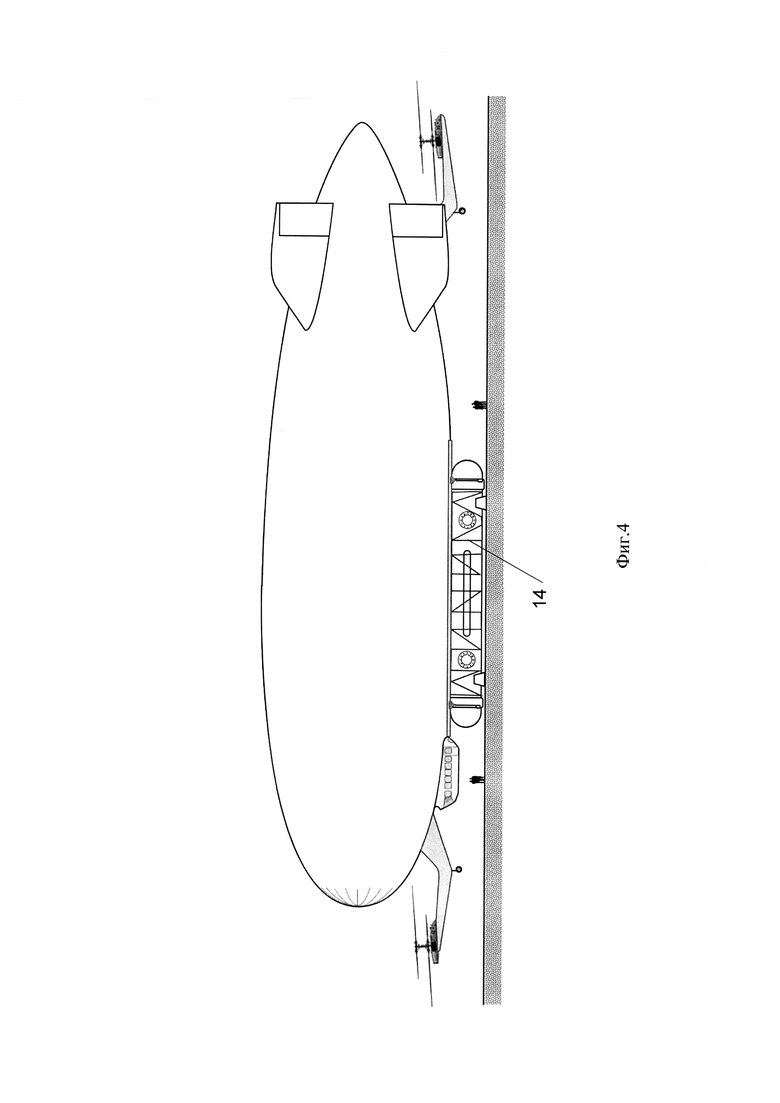
На Фиг. 4 показано состояние с завершенными операциями подтягивания груза к дирижаблю и его крепления средствами фиксации.
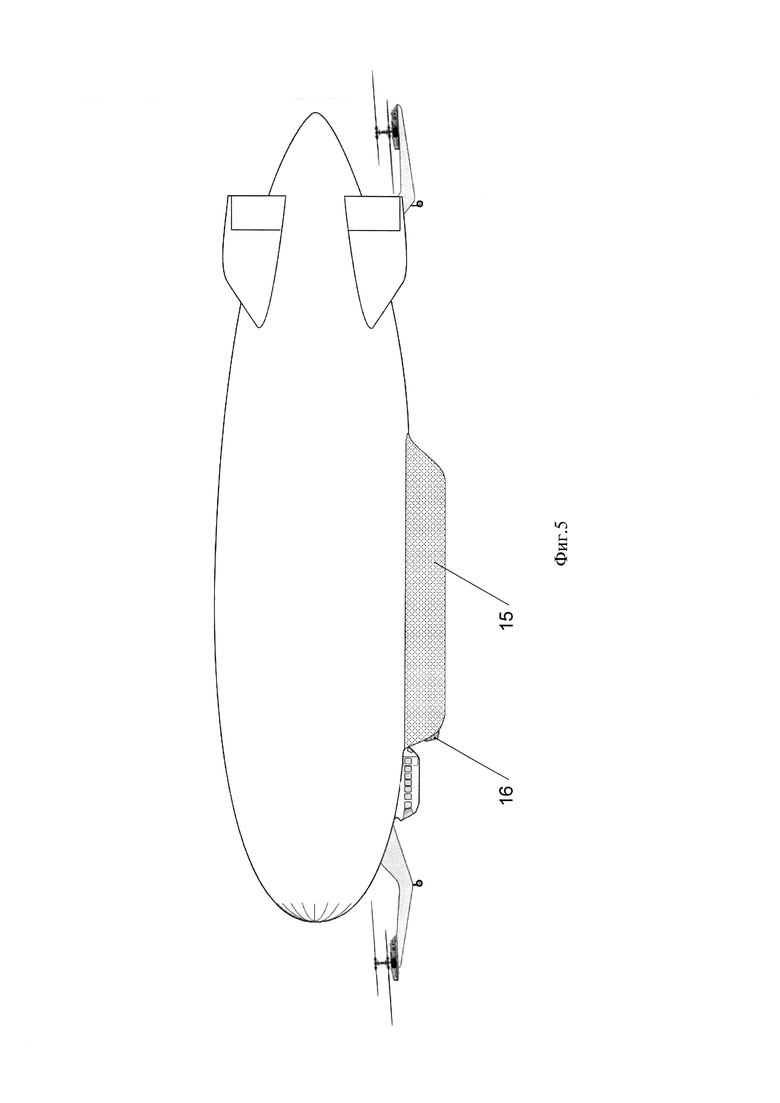
На Фиг. 5 показано состояние полета дирижабля с грузом, габариты которого позволяют закрыть его наддуваемым тканевым чехлом для снижения аэродинамического сопротивления.
Устройство грузовой зоны дирижабля по Фиг. 1, 2, 3, 4, 5 включает: оболочку корпуса дирижабля (1), хвостовое оперение (2), силовую установку (3), подвесную гондолу кабины экипажа (4), рельсы (5) в зоне размещения и закрепления коммерческого груза, тельферы (6), нижние стрингерные трубы (7) килевой балки, кронштейны (8) крепления рельс (5) к стрингерной трубе (7), шпангоутные распорные трубы (9) килевой фермы, верхнюю стрингерную трубу (10) килевой балки, троса (11) тельферов (6), коммерческий груз (12), такелажные петли груза (13), средства фиксации груза (14), тканевый чехол (15) для груза и воздухозаборник (16) для наддува тканевого чехла (15).
Устройство грузовой зоны дирижабля работает следующим образом (Фиг. 1, 2, 3, 4, 5):
Грузовая зона дирижабля является системой, которая обеспечивает принятие, размещение, закрепление, раскрепление и сдачу груза.
В средней части своей длины килевая балка дирижабля выполняется плоской по нижней поверхности. Снизу на левой и правой продольной стрингерной трубе (7) килевой балки (Фиг. 2) закрепляются рельсы (5), по которым могут перемещаться тельферы (6). Используются электрические дистанционно управляемые тельферы (6) с суммарным рабочим усилием на тросах достаточном для подтягивания дирижабля к грузу (12) (Фиг. З). Трубы (7) через кронштейны крепления (8) и рельсы (5) воспринимают усилия от веса груза, передаваемые через тельферы (6) и его тросы (11). Нижние стрингерные трубы (7) вместе с верхней стрингерной трубой (10) и шпангоутными распорными трубами (9) образуют сечение килевой балки, которое многократно повторяется по длине составной килевой фермы, изменяясь в размерах.
Для принятия груза (12) (Фиг. З) на борт нет необходимости поднимать его к дирижаблю аэродромными техническими средствами. Дирижабль маневрируя подруливает к грузу сверху, зависая на высоте в несколько метров. Перед приемом груза (12) оператор попарно раздвигает и фиксирует тельферы (6) на рельсах (5) в положении расчетной центровки груза. Далее он выпускает тросы (11) тельферов (6) на равную длину таким образом, чтобы можно было тросовые крюки тельферов (6) зацепить за такелажные петли (13) груза (12) в его нижней части. После этого оператор, управляя тельферами (6) с выносных пультов осуществляет выборку тросов, подтягивая тем самым дирижабль к грузу (12) до тех пор, пока груз (12) не упрется в ограничители килевой балки. В этом положении производится крепление груза (12) к узлам килевой балки достаточным количеством швартовочных тросов и страхующих высокопрочных металлических или полиамидных лент (14) (Фиг. 4). На этом операции принятия, размещения и закрепления груза (12) заканчиваются и дирижабль может начать выполнение полета. Сдача груза (12) производятся в обратном порядке.
Если форма перевозимого груза позволяет, то для снижения дополнительного аэродинамического сопротивления в полете предусматривается возможность использования тканевого чехла (15) (Фиг. 5), закрепляемого на килевой балке, охватывающего всю поверхность груза (12) и наддуваемого встречным скоростным напором через встроенный воздухозаборник (16).
При использовании описанного устройства грузовой зоны дирижабль достигает высокой степени автономности. Фактически в варианте жесткого крепления груза (12) он может забрать любой допустимый по весу объект перевозки, где бы он не находился и сдать его там, где полностью отсутствуют наземные грузоподъемные технические средства или установить груз непосредственно на место его монтажа.
Предложенное устройство грузовой зоны дирижабля позволило:
- устранить трудоемкие операции по коррекции взаимного положения груза и дирижабля в процессе приема и сдачи груза;
- уменьшить количество привлекаемого к погрузке-выгрузке технического персонала;
- исключить потребность в мощной грузоподъемной наземной технике;
- повысить автономность использования грузового дирижабля;
- получить существенную экономию массы конструкции, за счет отсутствия отдельной грузовой кабины с тяжелым усиленным полом.
Изобретение относится к авиации, в частности к устройству грузовой зоны дирижабля. Устройство грузовой зоны дирижабля включает оболочку корпуса с несущим газом и килевой фермой, хвостовое оперение, силовую установку, подвесную гондолу, погрузочные технические средства, места крепления груза к дирижаблю и средства фиксации груза. При этом дирижабль наделен способностью подруливать к грузу сверху, а на нижней поверхности корпуса дирижабля к силовым узлам килевой фермы прикреплены рельсы, которые снабжены электрическими тельферами, имеющими возможность перемещаться по рельсам в нужное положение под управлением оператора. Причем тельферы в момент достаточности выпущенной длины своих тросов имеют возможность зацепления тросовых крюков за такелажные узлы груза и обладают способностью подтягивать зависший дирижабль к грузу до упоров на нижней поверхности дирижабля, где неизменность положения груза дополнительно обеспечена средствами его фиксации. Предложенное устройство грузовой зоны дирижабля позволило устранить трудоемкие операции по коррекции взаимного положения груза и дирижабля в процессе приема и сдачи груза; уменьшить количество привлекаемого к погрузке-выгрузке технического персонала; исключить потребность в мощной грузоподъемной наземной технике; повысить автономность использования грузового дирижабля; получить существенную экономию массы конструкции, за счет отсутствия отдельной грузовой кабины с тяжелым усиленным полом. 5 ил.
Устройство грузовой зоны дирижабля, включающее оболочку корпуса с несущим газом и килевой фермой, хвостовое оперение, силовую установку, подвесную гондолу, погрузочные технические средства, места крепления груза к дирижаблю и средства фиксации груза, отличающаяся тем, что дирижабль наделен способностью подруливать к грузу сверху, а на нижней поверхности корпуса дирижабля к силовым узлам килевой фермы прикреплены рельсы, которые снабжены электрическими тельферами, имеющими возможность перемещаться по рельсам в нужное положение под управлением оператора, причем тельферы в момент достаточности выпущенной длины своих тросов имеют возможность зацепления тросовых крюков за такелажные узлы груза и обладают способностью подтягивать зависший дирижабль к грузу до упоров на нижней поверхности дирижабля, где неизменность положения груза дополнительно обеспечена средствами его фиксации.
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ И МОНТАЖА ОБЪЕКТОВ В ЭКСТРЕМАЛЬНЫХ УСЛОВИЯХ И АЭРОМОБИЛЬНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2748809C1 |
| WO 2010024725 A1, 04.03.2010 | |||
| DE 19625297 A1, 08.01.1998 | |||
| US 2009078818 A1, 26.03.2009 | |||
| DE 19811794 A1, 23.09.1999. | |||

