Изобретение относится к авиации, в частности к воздухоплаванию, а именно, к устройству дирижабельной модульной транспортной системы, обладающей способностью на основе базовых технических решений интегрировать варианты аэростатических летательных аппаратов различной максимальной грузоподъемности для воздушных перевозок контейнеров и крупногабаритных неделимых грузов.
Дирижабли модульной транспортной системы входят в класс гибридных аэростатических летательных аппаратов. Они снабжены вертолетными винтомоторными установками с несущими винтами, где в качестве источников мощности могут служить поршневые двигатели (ПД), турбовальные двигатели (ТВлД) или электродвигатели (ЭД)). Энергоносителем для источников мощности является углеводородное топливо (для ПД и ТВлД) или электроэнергия (для ЭД).
Подъемная сила дирижаблей модульной транспортной системы (МТС) создается аэростатической подъемной силой легкого газа (например, гелия или водорода), находящегося в оболочке корпуса дирижабля, а также с помощью подъемной силы тяги вертолетных несущих винтов. Крейсерский полет осуществляется за счет пропульсивной составляющей их тяги.
Управление по курсу и тангажу производится за счет дифференциального изменения тяги несущих винтов в горизонтальной и вертикальной плоскостях и за счет управления аэродинамическими силами на оболочке гибридного дирижабля МТС в том числе с помощью поверхностей хвостового оперения.
Конструкция оболочки дирижаблей МТС должна допускать продольное сопряжение нескольких корпусов в группу для наращивания максимальной грузоподъемности. В наибольшей степени этому требованию отвечает полужесткий тип корпуса с внутренней или наружной килевой фермой.
Конструкция корпуса, внешние обводы, взаимное расположение частей и способы изменения конфигурации гибридного аэростатического аппарата определяются в процессе проектирования с учетом принципов обеспечения модульности для всех вариантов максимальной грузоподъемности МТС.
При создании дирижабельной модульной транспортной системы ключевую роль играет конструкция базового модуля. Уже на этапе оценки свойств предполагаемого базового модуля можно ответить на вопрос: возможно ли создание на его основе МТС или нет. Анализ опубликованных проектов гибридных дирижаблей показывает, что описанные в них конструкции, как правило, скомпонованы так, что их нельзя использовать в качестве базового модуля дирижабельной МТС.
Известен гибридный дирижабль американской фирмы Piasecki «Helistat» (Ю.С. Бойко. «Воздухоплавательные аппараты и полеты на них» 2015 г. стр. 471, Рис. 335), в котором использованы четыре вертолетных модуля, расположенных по левому и правому борту оболочки на разветвленной выносной ферме. По проекту был построен экспериментальный образец, который до середины 1986 года совершил серию успешных полетов. Однако, в качестве базового модуля дирижабельной МТС такая конструкция не может быть применена, т.к. не позволяет добиваться увеличения максимальной грузоподъемности группировкой базовых дирижаблей путем их сопряжения по боковой поверхности оболочек. Этому препятствует боковое расположение выносных ферм и винтомоторных установок.
Известен гибридный дирижабль проекта Аэролет А-1 разработки КБ Ухтомского вертолетного завода (Ю.С. Бойко. «Воздухоплавательные аппараты и полеты на них» 2015 г. стр. 567-575, таблица 40), в котором две вертолетные винтомоторные установки также расположены по левому и правому борту оболочки дирижабля на выносных фермах. По своей технической сущности этот дирижабль является наиболее близким аналогом и принят в качестве прототипа.
Несущим винтам дирижабля обеспечены хорошие условия для работы на взлетно-посадочных и крейсерских режимах полета. Тем не менее, ряд прогрессивных технических решений, использованных в прототипе, осложняют реализацию проекта в рамках использования принципа модульности, снижают надежность и эксплуатационную технологичность конструкции.
С точки зрения применимости данной схемы в качестве базового модуля дирижабельной МТС она имеет ряд существенных недостатков. При сохранении неизменности типа вертолетных винтомоторных установок максимальную грузоподъемность здесь можно изменять только за счет вставок в обводы оболочки дополнительных объемов с несущим газом. При этом последовательно ухудшается управляемость гибридного дирижабля по курсу и тангажу, т.к. плечи воздействия управляющих моментов остаются постоянными, а плечи дестабилизирующих моментов увеличиваются по мере роста удлинения оболочки. Кроме того, из условия безопасности требуется синхронизирующая трансмиссия между левой и правой винтомоторной установками, которая должна включаться в работу в случае отказа одного из двигателей и выравнивать потоки мощности, подводимые к несущим винтам.
Присутствие винтомоторных установок, расположенных по бортам дирижабля не позволяет увеличивать максимальную грузоподъемность комплекса за счет объединения дирижаблей в группы путем сопряжения их по боковой поверхности оболочек, что также является серьезным препятствием к увеличению количества вариантов максимальной грузоподъемности МТС.
Задачей изобретения является устройство дирижабельной МТС, позволяющей получать множество, например, до восьми вариантов максимальной грузоподъемности модульной транспортной системы.
Задача изобретения решается тем, что диапазон вариантов максимальной грузоподъемности МТС обеспечен возможностью трансформации базового модуля гибридного дирижабля за счет вставок в обводы оболочки дополнительных объемов с несущим газом и за счет способности базовых модулей, содержащих вставки оболочек с дополнительными объемами, объединяться в группы с возможностью их сопряжения по боковым поверхностям оболочек.
Полученный технический результат характеризуется существенным признаком:
- диапазон максимальной грузоподъемности обеспечен возможностью трансформации базового модуля гибридного дирижабля за счет вставок в обводы оболочки дополнительных объемов с несущим газом и за счет способности базовых модулей, содержащих вставки оболочек с дополнительными объемами, объединяться в группы с возможностью их сопряжения по боковым поверхностям оболочек.
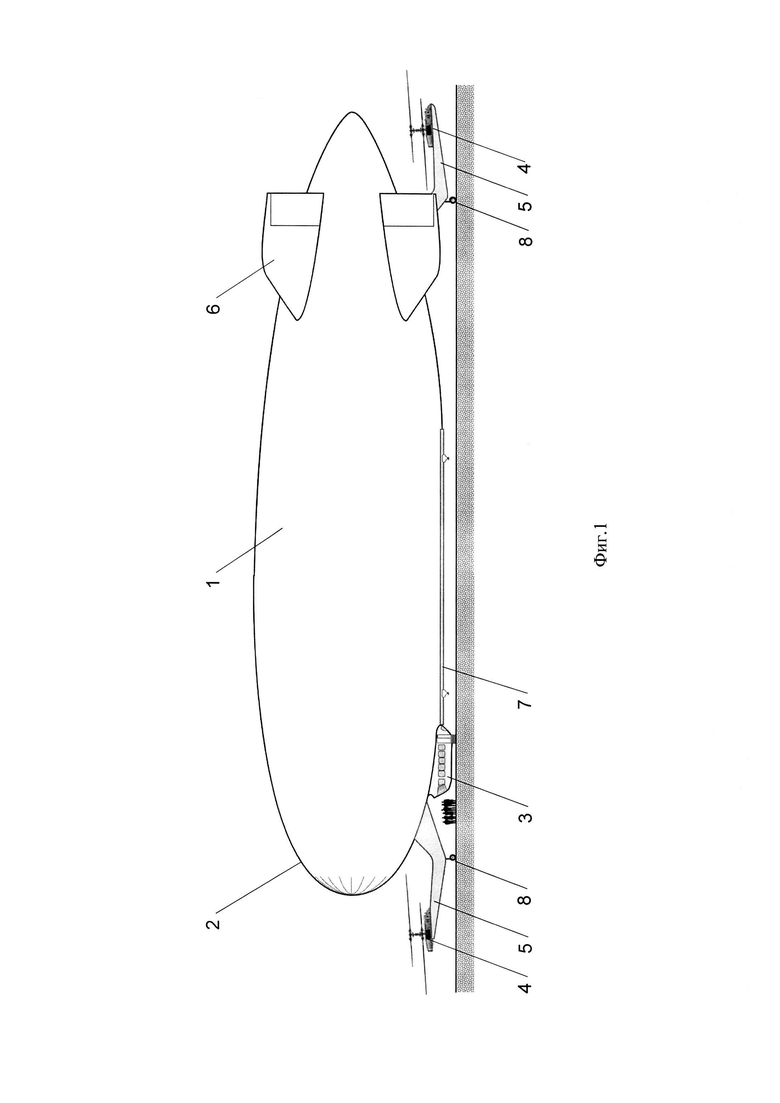
На Фиг. 1 показан базовый модуль гибридного дирижабля МТС.
На Фиг. 2 показан базовый модуль гибридного дирижабля МТС с одной вставкой в обводы оболочки дополнительного объема несущего газа.
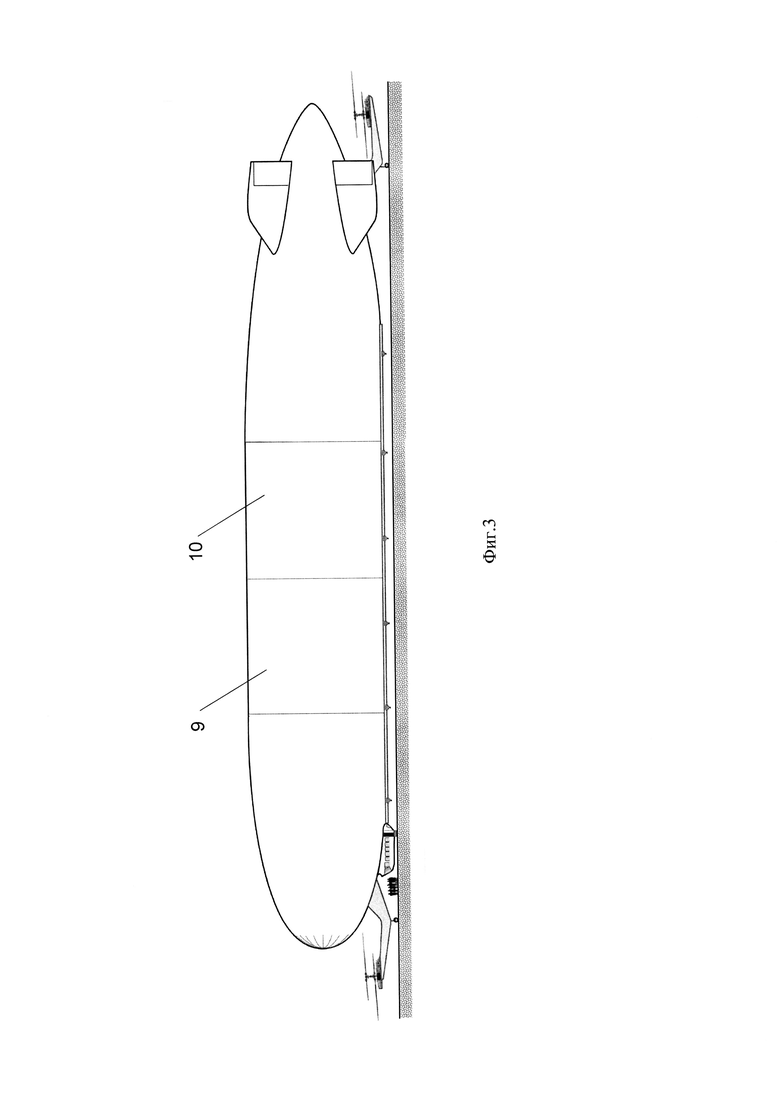
На Фиг. 3 показан базовый модуль гибридного дирижабля МТС с двумя вставками в обводы оболочки дополнительных объемов несущего газа.
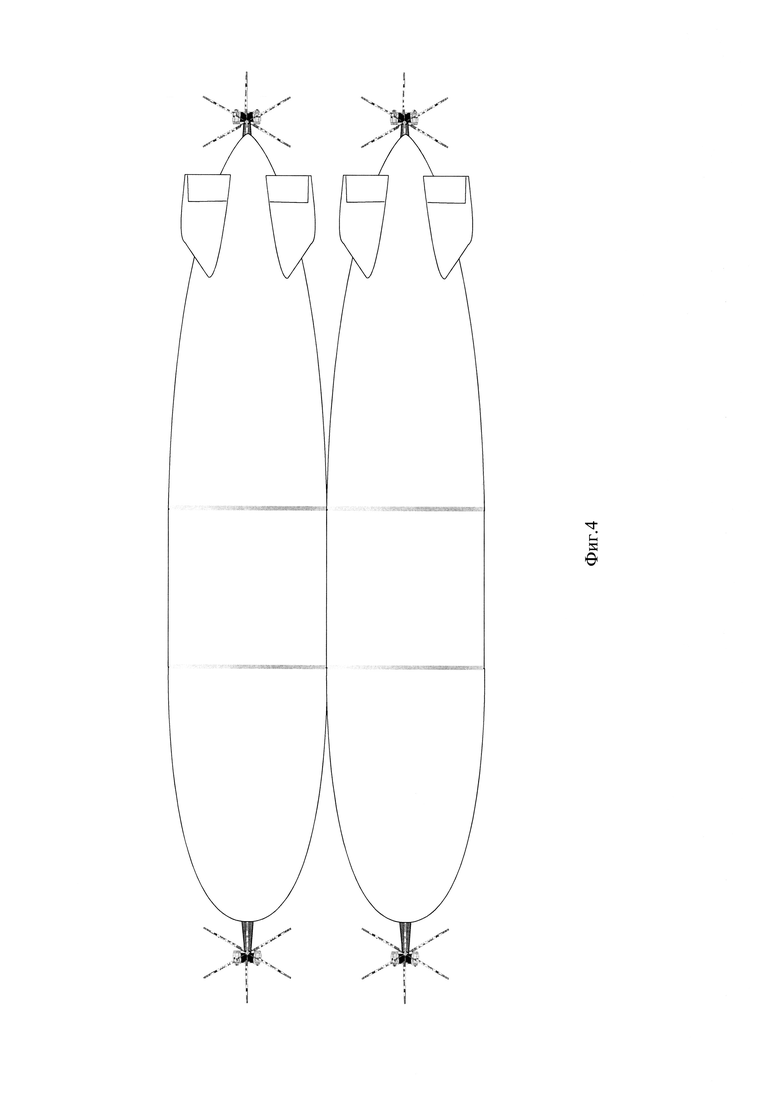
На Фиг. 4 показана группировка из двух модулей гибридного дирижабля МТС с одной вставкой в обводы оболочки дополнительного объема несущего газа.
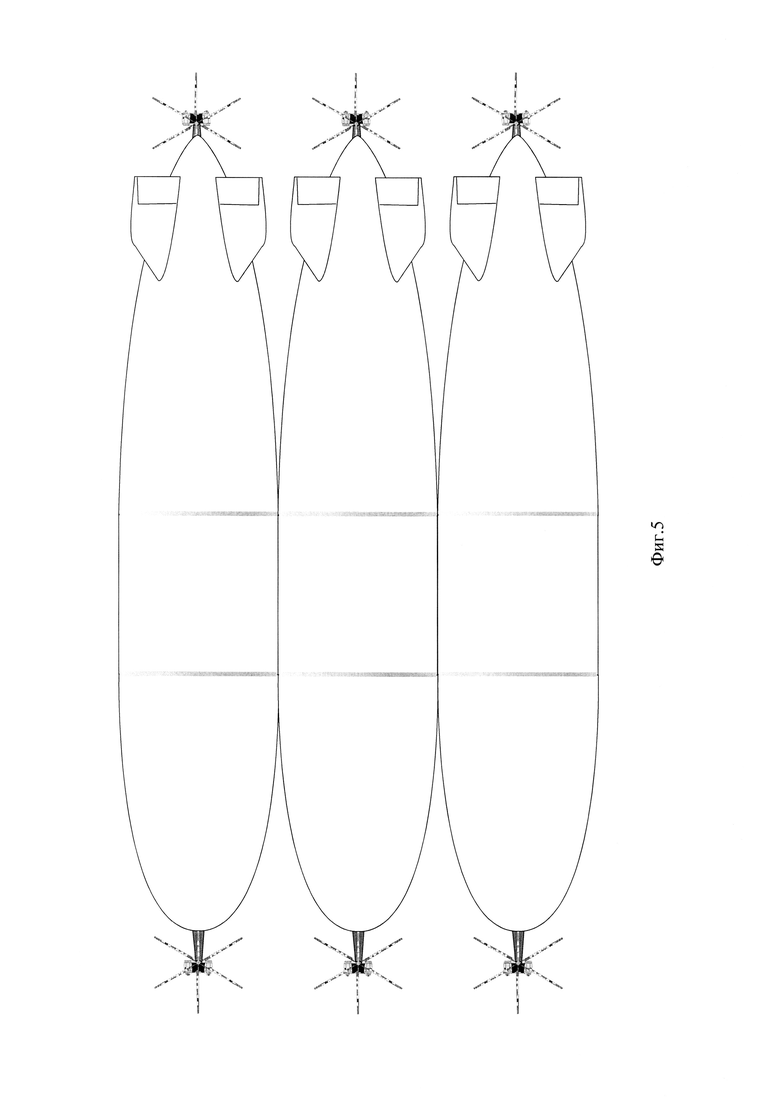
На Фиг. 5 показана группировка из трех модулей гибридного дирижабля МТС с одной вставкой в обводы оболочки дополнительного объема несущего газа.
На Фиг. 6 показана группировка из двух модулей гибридного дирижабля МТС с двумя вставками в обводы оболочки дополнительных объемов несущего газа.
На Фиг. 7 показана группировка из трех модулей гибридного дирижабля МТС с двумя вставками в обводы оболочки дополнительных объемов несущего газа.
На Фиг. 8 показана группировка из четырех модулей гибридного дирижабля МТС с двумя вставками в обводы оболочки дополнительных объемов несущего газа.
Устройство дирижабельной модульной транспортной системы по Фиг. 1, 2, 3, 4, 5, 6, 7, 8 включает:
Базовый модуль гибридного дирижабля (1) с оболочкой (2). Подвесную гондолу (3), силовую установку, состоящую и двух вертолетных модулей (4) с пилонами (5), хвостовое оперение (6), зону (7) размещения коммерческой грузовой нагрузки и двухопорное колесное щасси (8). Типовые вставки (9) и (10) в оболочку дирижабля. Количество базовых модулей (1) с вставками (9) и (10) определяется по максимальной грузоподъемности, которую требуется обеспечить при формировании групп.
Боковые поверхности оболочек (2) свободны от выступающих деталей, которыми в гибридных конструкциях дирижаблей обычно являются боковые выносные фермы и вертолетные винтомоторные установки или поворотные подъемно-маршевые воздушные винты. Боковые поверхности оболочек (2) могут сопрягаться с аналогичными поверхностями других дирижаблей МТС с возможностью частичной деформации по площади контакта при их объединении в группы.
Размах поверхностей хвостового оперения (6) на проекции плана должен быть меньше или равен максимальному диаметру оболочки гибридного дирижабля МТС. В противном случае больший размах плана хвостового оперения (6) будет препятствовать сопряжению модулей дирижаблей по боковым поверхностям.
Зона (7) размещения коммерческой грузовой нагрузки может иметь различное конструктивное исполнение, включая возможность внешнего жесткого или мягкого подвеса груза посредством системы тросов.
На борту груз в зоне (7) может размещаться: во внутреннем туннельном объеме килевой балки; в подвесной гондоле, удлиненной по продольной оси килевой балки; непосредственно закрепляться на узлах подвески килевой балки в нижней наружной части вдоль ее продольной оси (жесткая внешняя подвеска). Последний вариант является универсальным, наиболее простым в производстве и обеспечивает максимальную экономию массы конструкции.
Устройство дирижабельной модульной транспортной системы работает следующим образом (Фиг. 1, 2, 3, 4, 5, 6, 7, 8):
Базовый модуль гибридного дирижабля МТС (1) с боковыми поверхностями оболочки (2) свободными от выступающих деталей (Фиг. 1) является вариантом 1-го уровня максимальной грузоподъемности.
Для достижения 2-го уровня максимальной грузоподъемности в оболочку (2) базового модуля (1) в производстве или в эксплуатации монтируется типовая вставка (9), которая стыкуется с оболочкой (2) базового модуля (Фиг. 2).
Принцип модульности неизбежно приводит к появлению в конструкции лишних деталей и узлов по сравнению с цельными изделиями. Поэтому для экономии массы конструкции типовые вставки (9) и (10) необходимо делать как можно более крупными. С другой стороны, быстро наступают ограничения по росту удлинения гибридного дирижабля, если число типовых вставок будет больше двух. Представляется удобным, чтобы ширина типовых вставок (9) была одинаковой и равной одной единице удлинения, т.е. совпадала с диаметром оболочки. Например, если базовый дирижабль будет иметь удлинение λ=4, то с одной типовой вставкой (9) удлинение будет λ=5, с двумя вставками λ=6. Дальнейшее увеличение количества вставок уже нецелесообразно.
Таким образом, для достижения 3-го уровня максимальной грузоподъемности в оболочку (2) базового модуля гибридного дирижабля (1) в производстве или в эксплуатации монтируется две типовых вставки (9) и (10), которые стыкуются с оболочкой (2) базового модуля (Фиг. 3).
Кроме того, важно, чтобы наружная оболочка типовой вставки (9) имела цилиндрическую или очень близкую к ней форму, т.к. именно дирижабли с одной или двумя типовыми вставками далее объединяются в группы при помощи их сопряжения по боковым поверхностям.
Так группировка гибридного дирижабля МТС 4-го уровня максимальной грузоподъемности формируется из двух базовых гибридных дирижаблей (1), имеющих в своем составе по одной типовой вставке (9) (Фиг. 4).
Группировка гибридного дирижабля МТС 5-го уровня максимальной грузоподъемности формируется из трех базовых гибридных дирижаблей (1), имеющих в своем составе по одной типовой вставке (9) (Фиг. 5).
Группировка гибридного дирижабля МТС 6-го уровня максимальной грузоподъемности формируется из двух базовых гибридных дирижаблей (1), имеющих в своем составе две типовые вставки - (9) и (10) (Фиг. 6).
Группировка гибридного дирижабля МТС 7-го уровня максимальной грузоподъемности формируется из трех базовых гибридных дирижаблей (1), имеющих в своем составе две типовые вставки - (9) и (10) (Фиг. 7).
Группировка гибридного дирижабля МТС 8-го уровня максимальной грузоподъемности формируется из четырех базовых гибридных дирижаблей (1), имеющих в своем составе по типовые вставки - (9) и (10) (Фиг. 8).
Восемь уровней максимальной грузоподъемности дирижабельной МТС позволяют охватить практически весь существующий спрос на воздушную перевозку крупногабаритных неделимых грузов. Например, если спроектированный базовый гибридный дирижабль МТС будет иметь максимальную грузоподъемность 30 т (в 1,5 раза больше, чем у Ми-26Т), то интегрируя восемь уровней максимальной грузоподъемности дирижабельной МТС можно будет перевозить грузы массой от 30 до 200 тонн на дальность от 300 до 1000 км. Этот же диапазон грузоподъемности будет доступен для крановых операций при проведении монтажно-демонтажных работ.
Предложенное устройство дирижабельной модульной транспортной системы позволило:
- получить широкий диапазон максимальной грузоподъемности МТС на основе одной и той же базовой конструкции гибридного дирижабля;
- обосновать принципы выбора основных размеров типовой вставки оболочки с дополнительными объемами подъемного газа;
- подтвердить необходимость исключения выступающих за габариты боковых поверхностей оболочки деталей и узлов конструкции;
- разработать способы объединения гибридных дирижаблей базовой конструкции с одной или двумя типовыми вставками в самостоятельные группы различной максимальной грузоподъемности;
- выделить варианты конструктивного исполнения зоны размещения коммерческой грузовой нагрузки, включая возможность внешнего жесткого или мягкого подвеса груза посредством системы тросов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОВАЯ УСТАНОВКА АЭРОСТАТИЧЕСКОГО МОДУЛЯ ТРАНСПОРТНОЙ СИСТЕМЫ | 2021 |
|
RU2796433C2 |
| Устройство комплекса дирижабля-крана | 2022 |
|
RU2798252C1 |
| УСТРОЙСТВО ГРУЗОВОЙ ЗОНЫ ДИРИЖАБЛЯ | 2021 |
|
RU2783321C1 |
| АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2011 |
|
RU2511500C2 |
| КОМБИНИРОВАННАЯ АВИАЦИОННАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕВОЗКИ СЖАТЫХ ГАЗОВ | 2002 |
|
RU2244639C2 |
| Гибридный дирижабль | 2024 |
|
RU2838500C1 |
| Устройство вертостата с несущим горизонтальным оперением | 2016 |
|
RU2643895C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ - 2 РГ | 2017 |
|
RU2661260C1 |
| Способ строительства дирижабельного моста над ущельем | 2023 |
|
RU2816641C1 |
| БЕЗБАЛЛАСТНЫЙ ДИРИЖАБЛЬ | 1999 |
|
RU2174482C2 |

Изобретение относится к авиации, в частности к воздухоплаванию, а именно, к устройству дирижабельной модульной транспортной системы, обладающей способностью на основе базовых технических решений интегрировать варианты аэростатических летательных аппаратов различной максимальной грузоподъемности для воздушных перевозок контейнеров и крупногабаритных неделимых грузов. Дирижабельная модульная транспортная система включает оболочки с несущим газом, хвостовые оперения, силовые установки, гондолы для экипажей и места размещения груза. При этом диапазон вариантов максимальной грузоподъемности обеспечен возможностью трансформации базового модуля гибридного дирижабля за счет вставок в обводы оболочки дополнительных объемов с несущим газом и за счет способности базовых модулей, содержащих вставки оболочек с дополнительными объемами, объединяться в группы с возможностью их сопряжения по боковым поверхностям оболочек. Предложенное устройство позволило получить широкий диапазон максимальной грузоподъемности МТС на основе одной и той же базовой конструкции гибридного дирижабля. 8 ил.
Дирижабельная модульная транспортная система, включающая оболочки с несущим газом, хвостовые оперения, силовые установки, гондолы для экипажей и места размещения груза, отличающаяся тем, что диапазон вариантов максимальной грузоподъемности обеспечен возможностью трансформации базового модуля гибридного дирижабля за счет вставок в обводы оболочки дополнительных объемов с несущим газом и за счет способности базовых модулей, содержащих вставки оболочек с дополнительными объемами, объединяться в группы с возможностью их сопряжения по боковым поверхностям оболочек.
| US 2008179453 A1, 31.07.2008 | |||
| Опалубка для бетонирования фундаментов под колонны | 1984 |
|
SU1291687A1 |
| US 3180590 A, 27.04.1965 | |||
| US 2005230526 A1, 20.10.2005. | |||

