Изобретение относится к нефтяной промышленности и может найти применение при защите устьевой арматуры и привода штанговых скважинных насосов (ПШСН) от механического воздействия при возникновении аварийных ситуаций вследствие разрушения узлов и составных частей ПШСН всех типов, как отечественного, так и зарубежного производств, с использованием беспроводных технологий передачи данных (Bluetooth (WPAN – Wireless Personal Area Networks), WiFi (WLAN – Wireless Local Area Networks), WiMAX (WMAN – Wireless Metropolitan Area Networks), CSD, GPRS, EDGE, EV-DO, HSPA, UMTS, LTE, LTE Advanced (WWAN – Wireless Wide Area Networks), LoRa, радиосигналы, лазерные технологии) для повышения надежности и расширения функциональных возможностей системы.
Ввиду того, что ПШСН представляет собой взаимосвязанный комплекс технических устройств и конструкций, являясь сложной технической системой, включающей в себя, в том числе, и ограждения кривошипно-шатунного механизма (КШМ), то при эксплуатации ПШСН возможно возникновение ряда аварийных ситуаций, которые влекут за собой как повреждение и/или разрушение ПШСН, так и повреждение или полное разрушение устьевой арматуры, в том числе возможные человеческие жертвы.
Из уровня техники известны системы и устройства защиты ПШСН (RU 195101 U1, опубл. 15.01.2020, RU 133195 U1, опубл. 10.10.2013, RU 2680276 C2, опубл. 19.02.2019), предназначенные для предотвращения аварийных ситуаций, возникающих при эксплуатации ПШСН. Известные системы и/или устройства содержат управляющий блок, работа которого отвечает за своевременную остановку ПШСН и ограниченный круг датчиков контроля состояния. Недостатком данных систем и/или устройств является то, что в них не контролируется ряд важных узлов ПШСН, например, отсутствует контроль положения пальцев нижних головок шатуна (НГШ), контроль доступа за калитки ограждения КШМ. Также в данных системах, устройствах для передачи сигналов от датчиков к управляющему блоку в основном используются кабельные (проводные) технологии, применение которых приводит к невозможности контроля целостности ряда узлов ПШСН (например, пальцы НГШ) вследствие подвижности этих узлов, ограничивает расстояние передачи данных длиной применяемого кабеля (провода), а также снижает в целом общую надежность систем, устройств из-за высоких рисков повреждения кабельных (проводных) линий, связывающих датчики с управляющим блоком.
Из уровня техники известна система динамического контроля неисправностей насосных агрегатов (CN 211201941, опубл. 07.08.2020, МПК E21B47/009; G08B21/24), в которой применяются беспроводные датчики контроля положения гаек пальцев шатунов, но при этом не контролируется состояние и положение самих пальцев НГШ, а также отсутствует контроль наиболее часто возникающего дефекта – проворот пальцев НГШ. Отсутствие контроля за положением пальцев НГШ приводит к возникновению и развитию всевозможных аварийных ситуаций.
Из уровня техники известна система предупреждения аварийных ситуаций ПШСН (RU 2680276, опубл. 19.02.2019, МПК: E21B 47/009, F04B 49/00), взятая за прототип, включающая датчики контроля состояния, размещенные на узлах и агрегатах ПШСН и связанные с управляющим блоком проводником электрической цепи, кабельными (проводными) линиями, что является недостатком системы, поскольку повреждение кабельных (проводных) линий, связывающих датчики контроля состояния с управляющим блоком, приводит к выходу из строя всей системы в целом и продолжению работы ПШСН несмотря на возникновение аварийной ситуации вследствие неполучения управляющим устройством сигнала от датчиков контроля состояния.
Ещё один недостаток прототипа заключается в том, что система не содержит в своем составе датчиков контроля положения пальцев НГШ и датчиков контроля положения калиток ограждения кривошипно-шатунного механизма (КШМ). Отсутствие в данной системе датчиков контроля состояния и положения пальцев НГШ влечет за собой невозможность контроля возникновения аварийных ситуаций при проворотах и/или разрушениях пальцев НГШ, а отсутствие датчиков контроля положения калиток ограждения КШМ может привести к возникновению аварийных ситуаций, возникающий при попадании человека в зону ограждения кривошипно-шатунного механизма (КШМ) работающего ПШСН.
Также отсутствует контроль уровней вибрации и значений виброскорости, виброускорения и виброперемещения на узлах и агрегатах ПШСН, для своевременной сигнализации при превышении допустимых значений.
Использование системы, взятой за прототип, с установкой датчиков пространственного положения на траверсе и полке стойки, датчиков относительного положения на балансире и головке балансира, датчиков давления на устьевой арматуре с применением проводников электрической цепи (проводные, кабельные линии) не позволяет решить следующие задачи:
- предотвратить развитие аварийных ситуаций из-за неисправности (повреждения) кабельных (проводных) линий связи между датчиками и управляющим блоком;
- зафиксировать дефект и предотвратить аварийную ситуацию при провороте и/или разрушении пальцев НГШ, что влечет за собой возникновение аварийной ситуации и разрушение узлов ПШСН;
- своевременно остановить ПШСН при открывании калитки (калиток) ограждения при работающем ПШСН и исключить запуск ПШСН в случае, если открыта хотя бы одна калитка, тем самым предотвратить возникновение угрозы жизни и здоровью человека.
Известная система не является универсальной, так как не предусмотрено подключение с помощью беспроводных технологий любых существующих датчиков необходимых для повышения безопасности эксплуатации ПШСН.
К недостаткам прототипа также можно отнести сложность монтажа известной системы ввиду прокладки кабельных (проводных) линий связи между датчиками и управляющим блоком. При проведении монтажа и эксплуатации кабельных (проводных) линий персонал может столкнуться со следующими проблемами:
- монтажной бригаде придется производить монтаж на высоте и в стесненных условиях с большой вероятностью получения травм персоналом и высоким риском для жизни;
- в процессе эксплуатации происходит как механическое, так и природное воздействие на кабельные (проводные) линии, что приводит к их частому выходу из строя.
Достигаемый заявляемым изобретением технический результат заключается в повышении надежности системы и безопасности эксплуатации ПШСН, за счёт своевременной остановки ПШСН при фиксации отклонений от нормативных значений хотя бы одним из датчиков (появлении признаков аварийной ситуации), с предотвращением развития аварийных ситуаций на узлах и агрегатах ПШСН, в том числе ведущих к повреждению или разрушению ПШСН и/или устьевой арматуры.
Технический результат достигается тем, что в системе бесконтактной активной защиты привода штанговых скважинных насосов (ПШСН), передача данных от всех датчиков контроля состояния, размещенных на узлах и агрегатах ПШСН к управляющему блоку, осуществляется с использованием беспроводных технологий. Управляющий блок выполнен с возможностью остановки привода ПШСН путем размыкания электрической цепи, отвечающей за пуск/остановку ПШСН, и при фиксации отклонений от нормативных значений хотя бы одного из датчиков, автоматически останавливает привод ПШСН, а также исключает его запуск, пока не будет произведен сброс сработанного состояния датчика обслуживающим персоналом.
Датчиками контроля состояния ПШСН служат датчики контроля пространственного и относительного положения (далее датчики контроля положения: наклона, шариковые, оптические, ртутные, акселерометры (вибрации), гироскопы, магнитно-контактные (герконы), емкостные и иные) и датчики давления, при этом датчики контроля положения закреплены на траверсе, верхней плоскости балки балансира, рядом с опорным подшипником и полке стойки ПШСН, балансире и головке балансира ПШСН, датчик давления или система датчиков – на устьевой арматуре, при этом, на пальцах нижних головок шатуна (НГШ) дополнительно установлены датчики контроля положения пальцев НГШ.
Также безопасность эксплуатации ПШСН повышается вследствие дополнительной установки датчиков контроля положения калиток ограждения КШМ, что позволяет осуществлять своевременную остановку ПШСН при открывании калитки ограждения при работающем ПШСН, а также исключить запуск ПШСН в случае, если открыта хотя бы одна калитка.
Применение акселерометров в датчиках контроля положения, дополнительно позволяет контролировать уровни вибраций, значения виброскорости, виброускорения и виброускорения на узлах ПШСН, для своевременной передачи данных по беспроводной связи управляющему блоку.
Универсальность системы обеспечивается за счёт возможности применения датчиков на основе беспроводных технологий для контроля состояния узлов и агрегатов ПШСН всех типов, как отечественного, так и зарубежного производства, при обеспечении высокой надежности передачи данных от датчиков к управляющему блоку при минимальных затратах на монтаж и обслуживание. Также имеется возможность подключения к данной системе любых существующих датчиков на основе беспроводных технологий передачи данных (Bluetooth (WPAN – Wireless Personal Area Networks), WiFi (WLAN – Wireless Local Area Networks), WiMAX (WMAN – Wireless Metropolitan Area Networks), CSD, GPRS, EDGE, EV-DO, HSPA, UMTS, LTE, LTE Advanced (WWAN – Wireless Wide Area Networks), LoRa, радиосигналы, лазерные технологии) для расширения функционала данной системы.
Все датчики системы используют беспроводную передачу данных, что исключает необходимость использования проводных технологий, а именно исключает необходимость прокладывания кабеля, а также устраняется причина прерывания связи между датчиками и управляющим блоком вследствие физического повреждения кабельной линии. Управляющий блок выполнен с возможностью остановки ПШСН при фиксации отклонений от нормативных значений хотя бы одним из датчиков, а также исключает возможности запуска ПШСН пока не будет произведен сброс сработанного состояния датчика обслуживающим персоналом. Кроме того, управляющий блок имеет возможность собственной настройки, подключения, отключения, сброса состояния датчиков с помощью мобильного приложения и передачи данных различным эксплуатационным и ремонтным службам о состоянии оборудования с использованием как проводных, так и беспроводных технологий.
Установка датчиков контроля положения на траверсе, верхней полке стойки, верхней плоскости балки балансира, рядом с опорным подшипником позволяет контролировать уровень отклонения углов α, β и γ от допустимых значений и при необходимости контролировать уровни вибрации, значения виброскорости, виброускорения и виброперемещения на данных узлах.
Установка датчика контроля положения на балансире и головке балансира ПШСН позволяет контролировать их пространственное положение и зафиксировать начальный момент падения головки балансира и при необходимости контролировать уровни вибрации, значения виброскорости, виброускорения и виброперемещения на данных узлах.
Установка датчиков контроля положения на калитках ограждения КШМ позволяет своевременно остановить ПШСН при открывании калитки ограждения при работающем ПШСН, а также исключить запуск ПШСН в случае, если открыта хотя бы одна калитка, что позволяет исключить возможность воздействия ПШСН на жизнь и здоровье человека.
Установка датчиков контроля положения на пальцах НГШ позволяет контролировать положение пальцев НГШ своевременно остановить ПШСН при провороте и/или разрушении данных пальцев.
Установка датчиков давления на устье скважины позволяет своевременно остановить ПШСН при разгерметизации устья скважины, при изменении давления выше регламентированных значений.
Связь датчиков с управляющим блоком, основанная на использовании беспроводных технологий, позволяет при возникновении аварийных ситуаций своевременно останавливать ПШСН и существенно повысить надежность оборудования, исключив развитие неисправности.
Кроме того, использование датчиков на основе беспроводных технологий, обеспечивает высокую надежность работы системы при минимальных затратах на ее монтаж и обслуживание.
Изобретение проиллюстрировано следующими образом.
На фиг. 1 показано размещение элементов заявленной системы на узлах и агрегатах ПШСН;
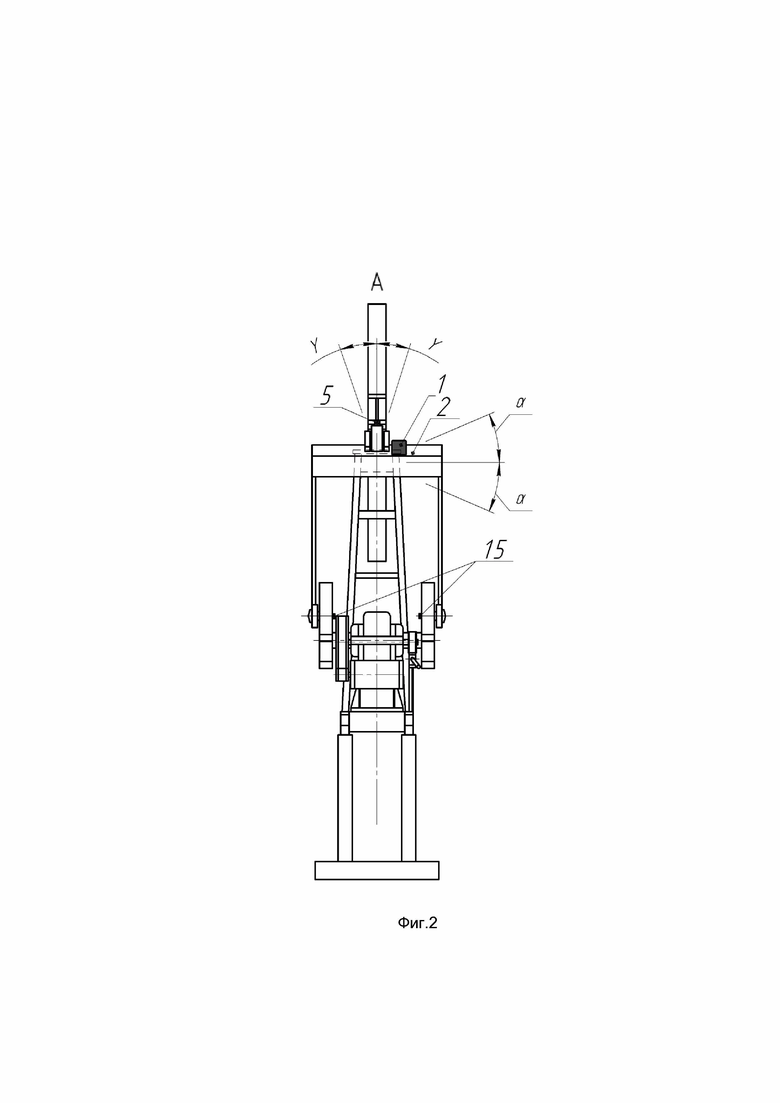
на фиг. 2 – вид А на фиг.1 с торца;
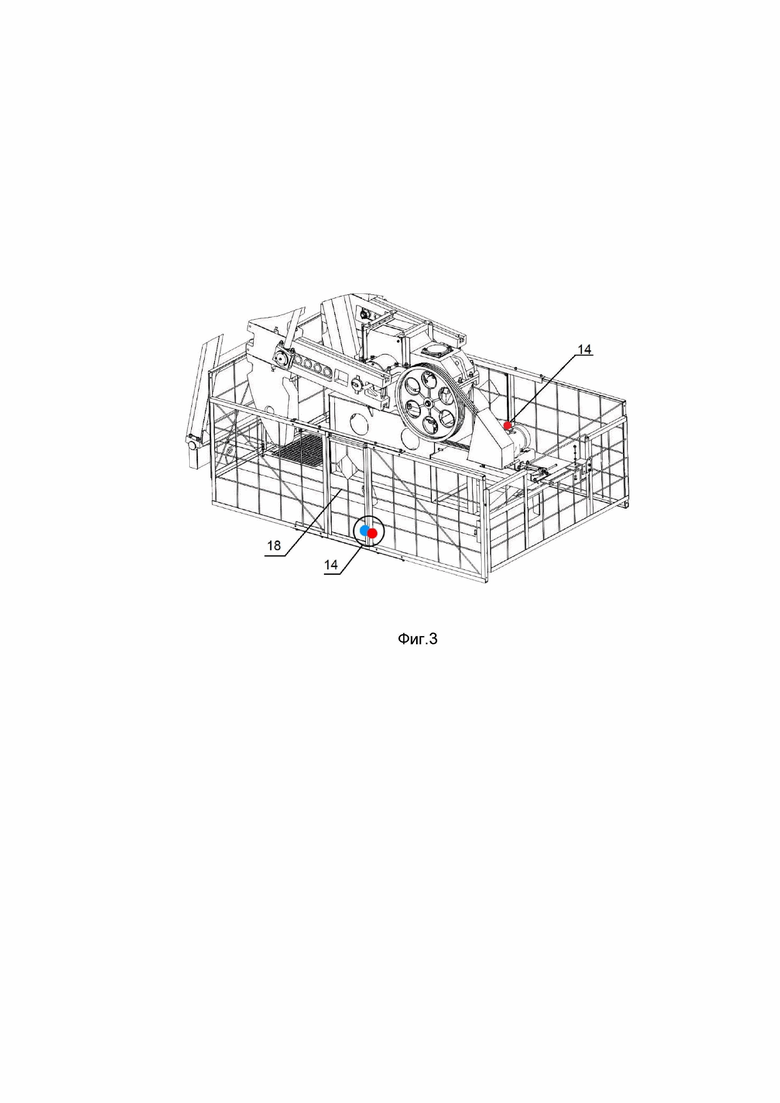
на фиг. 3 – места установки датчиков контроля положения калиток ограждения КШМ;
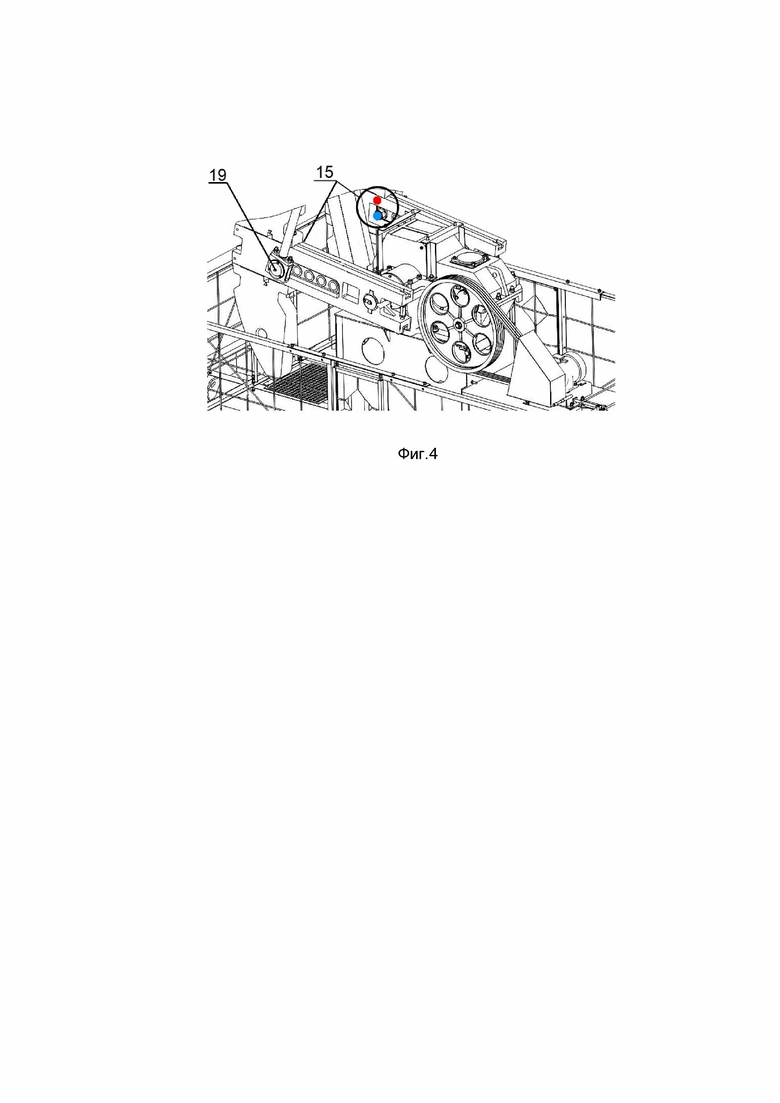
на фиг. 4 – места установки датчиков контроля положения пальцев НГШ.
Датчик 1 контроля положения (наклона, шариковый, оптический, ртутный, акселерометр, гироскоп и иной) закреплен на траверсе 2 и фиксирует отклонение угла α наклона траверсы 2 относительно рабочего положения и, при необходимости, дополнительно контролирует уровни вибрации, значения виброскорости, виброускорения и виброперемещения. Датчик 3 контроля положения (наклона, шариковый, оптический, ртутный, акселерометр, гироскоп и иной) закреплен на верхней полке стойки 4 и фиксирует отклонение угла наклона β стойки 4 относительно вертикальной оси стойки, при необходимости дополнительно контролирует уровни вибрации, значения виброскорости, виброускорения и виброперемещения. Датчик 5 контроля положения (наклона, шариковый, оптический, ртутный, акселерометр, гироскоп и иной) закреплен на верхней плоскости балки балансира 7, рядом с опорным подшипником 17 и фиксирует отклонение угла наклона β и γ балансира 7, при необходимости дополнительно контролирует уровни вибрации, значения виброскорости, виброускорения и виброперемещения.
Датчик 6 контроля положения (магнитно-контактные (геркон), акселерометры, гироскопы, емкостные, и иные) устанавливается на балансире 7 и головке 8 балансира 7 ПШСН, что позволяет контролировать их пространственное положение и фиксирует начальный момент падения головки 8 балансира, при необходимости дополнительно контролирует уровни вибрации, значения виброскорости, виброускорения и виброперемещения.
Датчики 14 контроля положения (магнитно-контактные (геркон), акселерометры, гироскопы, емкостные) устанавливаются на калитки 18 ограждения 9 КШМ, фиксируют открытие калиток.
Датчики 15 контроля положения (магнитно-контактные (геркон), акселерометры, гироскопы, емкостные) устанавливаются на пальцах 19 НГШ, контролируют их пространственное положение и фиксируют проворот и/или разрушение пальцев НГШ.
Датчики 16 (датчики контроля давления) устанавливаются на устьевой арматуре 17 в местах, регламентированных заводом-изготовителем устьевой арматуры для контроля как разгерметизации устья скважины, так и изменения давления выше регламентированных значений.
Все датчики используют беспроводную передачу данных управляющему блоку 10. Управляющий блок 10 выполнен с возможностью остановки ПШСН при фиксации отклонений от нормативных значений хотя бы одним из датчиков (1, 3, 5, 6, 14, 15, 16), исключения возможности запуска ПШСН пока не будет не произведен сброс сработанного состояния датчика обслуживающим персоналом, и передачи данных различным службам, отвечающим за эксплуатацию и ремонт ПШСН и устьевой арматуры.
Страховочное приспособление 12 содержит страховочный элемент – цепь, канат или иной грузозахватный элемент 13, связывающий страховочное приспособление 12 с головкой 8 балансира и удерживающий ее от падения на устьевую арматуру 17 при возникновении аварийной ситуации «обрыв головки балансира». Длина и натяжение элемента 13 регулируется в зависимости от модели и конструктивных особенностей ПШСН.
Система бесконтактной активной защиты ПШСН работает следующим образом.
При фиксации отклонений от нормативных значений хотя бы одним из датчиков 1, 3, 5, 16, происходит срабатывание указанных датчиков с выдачей управляющего сигнала по беспроводным каналам управляющему блоку 10 на остановку ПШСН. Вследствие чего реле размыкания (не показано) в управляющим блоке 10 осуществляет остановку привода 11 ПШСН.
В случае открытия какой-либо из калиток 18 ограждения 9 КШМ происходит срабатывание датчика 14 с выдачей управляющего сигнала управляющему блоку 10 на остановку ПШСН, исключая запуск ПШСН в случае, если открыта хотя бы одна калитка.
В случае проворота и/или разрушения пальцев 19 НГШ происходит срабатывание датчика 15 с выдачей управляющего сигнала по беспроводным каналам управляющему блоку 10 на остановку ПШСН.
При возникновении аварийной ситуации по обрыву головки 8 балансира происходит срабатывание датчика 6, установленного на балансире 7 и на головке 8 балансира с выдачей управляющего сигнала по беспроводным каналам управляющему блоку 10 на остановку ПШСН.
При получении управляющего сигнала по беспроводным каналам от любого из датчиков управляющим блоком 10 на остановку ПШСН, исключается возможность запуска ПШСН пока не будет произведен сброс сработанного состояния датчика обслуживающим персоналом, происходит оповещение различных служб, отвечающих за эксплуатацию и ремонт ПШСН и устьевой арматуры по беспроводным и/или проводным каналам связи о причине остановки ПШСН.
При возникновении аварийной ситуации «обрыв головки балансира» одновременно с остановкой привода 11 срабатывает страховочное приспособление 12.
Использование заявляемого изобретения имеет следующие преимущества:
• возможность расширения функционала при использовании контроля уровней вибрации и значений виброскорости, виброускорения и виброперемещения на узлах ПШСН;
• простота монтажа, перемонтажа и эксплуатации из-за отсутствия сварных работ и прокладки кабельных групп;
• минимизация затрат по ликвидации последствий аварийных ситуаций;
• повышение надежности системы вследствие отсутствия кабельных групп;
• высокая сопротивляемость воздействиям внешних факторов (неблагоприятные погодные условия воздействующие на кабельные линии, механические воздействия персонала на кабельные линии системы (разрыв) при эксплуатации ПШСН);
• повышение безопасности эксплуатации ПШСН;
• низкое энергопотребление за счет автономного питания беспроводных датчиков от собственных источников питания (аккумуляторные батареи).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ ПРИВОДА ШТАНГОВЫХ СКВАЖИННЫХ НАСОСОВ | 2016 |
|
RU2680276C2 |
| Усилитель траверсы привода глубинного штангового насоса | 2019 |
|
RU2724809C1 |
| Система дистанционного контроля безопасности при проведении геофизических исследований и работ в действующих газовых скважинах | 2022 |
|
RU2810668C1 |
| Полномасштабный тренажер газораспределительной станции | 2022 |
|
RU2780592C1 |
| Способ эксплуатации скважины, оборудованной скважинной штанговой насосной установкой, в условиях, осложненных снижением динамического уровня | 2022 |
|
RU2790157C1 |
| СПОСОБ ДОБЫЧИ НЕФТИ | 2008 |
|
RU2367777C1 |
| СПОСОБ ДОБЫЧИ ГАЗОВОГО КОНДЕНСАТА | 2008 |
|
RU2367781C1 |
| СПОСОБ ДОБЫЧИ ГАЗА | 2008 |
|
RU2367776C1 |
| КУСТ НЕФТЯНЫХ СКВАЖИН | 2008 |
|
RU2367772C1 |
| КУСТ НЕФТЕГАЗОВЫХ СКВАЖИН | 2008 |
|
RU2367769C1 |

Изобретение относится к нефтяной промышленности и может найти применение при защите устьевой арматуры и привода штанговых скважинных насосов (ПШСН) от механического воздействия при возникновении аварийных ситуаций вследствие разрушения узлов и составных частей ПШСН. Техническим результатом является повышение надежности системы и безопасности эксплуатации ПШСН за счёт своевременной остановки ПШСН при фиксации отклонений от нормативных значений хотя бы одним из датчиков с предотвращением развития аварийных ситуаций на узлах и агрегатах ПШСН. Заявлена система бесконтактной активной защиты привода штанговых скважинных насосов (ПШСН), включающая датчики контроля состояния ПШСН, размещенные на узлах и агрегатах ПШСН и связанные с управляющим блоком, выполненным с возможностью остановки привода ПШСН путем размыкания электрической цепи, при фиксации отклонений от нормативных значений хотя бы одного из датчиков. При этом датчиками контроля состояния ПШСН служат датчики контроля положения и датчики давления, при этом датчики контроля положения закреплены на траверсе, полке стойки ПШСН, на балансире и головке балансира ПШСН, на верхней плоскости балки балансира рядом с опорным подшипником дополнительно установлен датчик контроля положения, фиксирующий углы наклона балансира, датчик давления или система датчиков - на устьевой арматуре. Дополнительно на пальцах нижних головок шатуна (НГШ) установлены датчики контроля положения пальцев НГШ. Связь всех датчиков контроля состояния ПШСН с управляющим блоком осуществляется на основе беспроводных технологий передачи данных. 2 з.п. ф-лы, 4 ил.
1. Система бесконтактной активной защиты привода штанговых скважинных насосов (ПШСН), включающая датчики контроля состояния ПШСН, размещенные на узлах и агрегатах ПШСН и связанные с управляющим блоком, выполненным с возможностью остановки привода ПШСН путем размыкания электрической цепи, при фиксации отклонений от нормативных значений хотя бы одного из датчиков, при этом датчиками контроля состояния ПШСН служат датчики контроля положения и датчики давления, при этом датчики контроля положения закреплены на траверсе, полке стойки ПШСН, на балансире и головке балансира ПШСН, на верхней плоскости балки балансира рядом с опорным подшипником дополнительно установлен датчик контроля положения, фиксирующий углы наклона балансира, датчик давления или система датчиков - на устьевой арматуре, связь всех датчиков контроля состояния ПШСН с управляющим блоком осуществляется на основе беспроводных технологий передачи данных, отличающаяся тем, что на пальцах нижних головок шатуна (НГШ) установлены датчики контроля положения пальцев НГШ.
2. Система по п.1, отличающаяся тем, что дополнительно содержит в качестве датчиков контроля состояния ПШСН датчики контроля положения калиток ограждения кривошипно-шатунного механизма (КШМ).
3. Система по п.2, отличающаяся тем, что управляющий блок выполнен с возможностью блокирования запуска ПШСН при открытой калитке ограждения.
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ ПРИВОДА ШТАНГОВЫХ СКВАЖИННЫХ НАСОСОВ | 2016 |
|
RU2680276C2 |
| 0 |
|
SU195101A1 | |
| Веялка-сортировка | 1930 |
|
SU23011A1 |
| Клапан наркозного аппарата | 1960 |
|
SU133195A1 |
| US 10794173 B2, 06.10.2020 | |||
| US 20200392834 A1, 17.12.2020 | |||
| CN 104141478 А, 12.11.2014 | |||
| CN 112483072 A, 12.03.2021 | |||
| CN 210178345 U, 24.03.2020 | |||
| US 5224834 A, 06.07.1993 | |||
| US 9033676 B2, 19.05.2015 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

