[01] Область техники
[02] Группа изобретений относится к лесной промышленности, а именно к способам и машинам для обработки лесоматериала, и может использоваться при лесозаготовительных работах.
[03] Уровень техники
[04] Традиционные методы обработки лесоматериала, предусматривают механизированную валку дерева, удаление сучьев и раскряжевку ствола на сортименты в виде бревен заданной длины. Работы осуществляют в лесосеке при помощи колесных и гусеничных валочных машин (валочно-раскряжевочных машин, харвестеров). Указанные машины оснащены манипуляторами с валочно-раскряжевочными (или валочно-сучкорезно-раскряжевочными) головками.
[05] Раскряжевка стволов на сортименты (бревна определенного размера, освобожденные от сучьев) реализуется автоматически, согласно технологической карте лесозаготовки. При этом измерительная система, находящаяся в машине, получает информацию о длине и диаметре дерева от измерительных датчиков, находящихся в валочно-раскряжевочной головке. Как правило, диаметр ствола определяется с помощью датчиков, встроенных в сучкорезные ножи и контактирующих с бревном. Длину ствола определяют посредством датчика в мерном колесе головки, которое движется по бревну в момент его очистки от сучьев. Совокупность этих данных позволяет измерительной системе автоматически раскряжевывать ствол согласно технологической карте.
[06] В такой технологической цепочке часть действий лесозаготовительная машина делает автоматически, а часть действий выполняет оператор. Оператор должен визуально оценить характеристики дерева, выбрать дерево для валки, направление валки, осуществить захват, спиливание, съем с пня и присвоить стволу породу дерева. Раскряжевка на сортименты происходит автоматически при помощи программы и ценовой матрицы, составленной по технологической карте делянки. Также машина самостоятельно ведет подсчет объема продукции - кубатуры по сортиментам.
[07] Общие недостатки такого метода состоят в том, что измерения параметров дерева происходят только после его валки во время обработки ствола. Если на заданной программой длине диаметр бревна будет меньше требуемого, то валочная головка вынуждена будет остановиться и вернуться назад для нового замера сортимента меньшей длины. Это техническое несовершенство особенно заметно на выборочных рубках и рубках ухода. На таких делянках оператор сам выбирает дерево, подлежащее валке. Это дерево должно соответствовать параметрам технологической карты делянки. Нужная же информация о дереве (его длина, диаметр, конусность) появляется у оператора только после того, как он его спилит. И если из него не получаются нужные сортименты - его перепиливают на порубочные остатки и оставляют на делянке.
[08] Кроме того, точность контактного способа обмера древесины сильно зависит от износа валочной головки, сезона заготовки и степени загрязнения ствола (снег, грязь, лед). Для соответствия размеров сортиментов по кубатуре в 8-9% и длине 3-5 см валочно-раскряжевочную головку необходимо ежедневно калибровать, обмеряя только что раскряжеванные сортименты, сравнивая фактический размер с размером в компьютерной системе машины.
[09] Таким образом, существует необходимость обмера лесоматериала с использованием бесконтактных измерительных средств.
[010] Из уровня техники известен способ обработки лесоматериала, в котором обмер осуществляют с помощью комбинации лазерного измерительного устройства и контактных датчиков (см. патент РФ RU 2653111, 05.06.2014). Для обработки лесоматериала производят захват бревна валочно-раскряжевочной головкой, определяют его размеры с помощью датчиков, встроенных в головку, и дополнительно контролируют данные измерений с помощью лазерного измерительного устройства. Для этого направляют измерительное сигнальное поле, образованное одним или более измерительными лучами и записывают облако точек, созданное посредством измерительного сигнального поля. Подлежащие идентификации части бревна определяют из этого облака точек, и подлежащий измерению параметр определяют и формируют из информационного содержания облака точек. Полученный результат направляется в измерительную систему машины для обработки лесоматериала для дальнейшего использования.
[011] Таким образом, используемая в аналоге бесконтактная система измерения, размещенная на лесозаготовительной машине, лишь дополняет и корректирует механическую систему измерений, размещенную в валочной головке. Более того, система работает лишь с готовым стволом, то есть со сваленным деревом, ведя отсчет от его комля.
[012] Наиболее близким аналогом изобретения является способ обработки лесоматериала и валочная машина для его реализации, раскрытые в публикации международной заявки WO 2006126952, 30.11.2006 (далее - Д1). Валочная машина, включает манипулятор с валочно-раскряжевочной головкой, а также бесконтактную систему измерений, имеющую блок камер, которые связаны с лазерными источниками, создающими лазерную точку или лазерную линию на части ствола. Способ обработки лесоматериала предусматривает захват и валку дерева, а также очистку от сучьев и раскряжевку ствола на сортименты. При этом в процессе обработки ствола определяется длина, диаметр, овальность и продольная кривизна ствола поваленного дерева. Указанные данные позволяют более точно классифицировать произведенные бревна или определить цену продажи сортимента.
[013] К недостаткам аналога относятся узкие функциональные возможности по использованию бесконтактной системы. Так система определяет параметры ствола уже после валки дерева, что не дает возможности спрогнозировать характеристики ствола и рационально провести раскряжевку на сортименты. Кроме того, данные измерений используются лишь для последующего учета сортимента, но не облегчают работу оператору и не автоматизируют процесс обработки. Кроме того, бесконтактный обмер материала с проецированием лазерных точек или линий не обладает достаточной точностью.
[014] Таким образом, техническими проблемами, на решение которых направлена группа изобретений, является низкий уровень автоматизации лесозаготовительных работ и точность бесконтактных измерений.
[015] Раскрытие сущности изобретения
[016] Техническим результатом группы изобретений является повышение уровня автоматизации лесозаготовительных работ с помощью валочной машины, повышение точности определения характеристик лесоматериала, исключение необходимости калибровки валочной головки, увеличение выработки машины и снижение времени простоя.
[017] Указанный технический результат достигается в способе обработки лесоматериала с использованием валочной машины, содержащей манипулятор с валочно-раскряжевочной головкой и бесконтактную систему измерений, снабженную по меньшей мере двумя видеокамерами с лазерными дальномерами и блоком обработки данных.
При этом способ включает следующие операции: сканирование с помощью бесконтактной системы измерений стоящих на корню деревьев, находящихся в зоне валочно-раскряжевочной головки и определение прогнозных параметров каждого дерева, включающих геометрические размеры, породу, тип и количество сортиментов, - выбор дерева для валки на основании результатов сканирования; захват и валку дерева с помощью валочно-раскряжевочной головки; очистку ствола от сучьев и его раскряжевку на сортименты при протяжке ствола через валочно-раскряжевочную головку под контролем бесконтактной системы измерения, которая определяет фактический диаметр среза ствола и отмеряет длину отрезка ствола с учетом прогнозных параметров дерева, задавая длину сортимента.
[018] Согласно частным вариантам реализации способа:
[019] - сканирование предусматривает получение множества изображений деревьев с видеокамер с разных ракурсов и их обработку блоком обработки данных с построением цифровой модели каждого дерева на основе трапеции, характеризующей продольный срез дерева;
[020] - породу дерева определяют блоком обработки данных с помощью алгоритма машинного обучения путем сравнения изображений из базы данных с полученными с видеокамер изображениями;
[021] - тип и количество сортиментов определяют блоком обработки данных на основании цифровой модели дерева и данных о его породе, причем с учетом типа и количества сортиментов дополнительно определяют прогнозную стоимость дерева на основании заданной ценовой матрицы;
[022] - прогнозные данные для каждого дерева выводят на экран оператора валочной машины для выбора дерева, подлежащего валке.
[023] - в процессе раскряжевки блок обработки данных получает с видеокамер множество изображений ствола, выходящего из валочно-раскряжевочной головки, а длину отрезка ствола блок обработки данных задает на основании цифровой модели дерева путем измерения расстояния от среза до контрольной точки валочно-раскряжевочной головки.
[024] Технический результат также достигается в конструкции валочной машины, которая содержит манипулятор с валочно-раскряжевочной головкой и бесконтактную систему измерений, снабженную по меньшей мере двумя видеокамерами с лазерными дальномерами и блоком обработки данных. Причем бесконтактная система измерений выполнена с возможностью: сканирования стоящих на корню деревьев, находящихся в зоне валочно-раскряжевочной головки, и определения перед валкой прогнозных параметров каждого дерева, включающих геометрические размеры, породу, тип и количество сортиментов; и определения в процессе раскряжевки фактического диаметра среза ствола и задания длины отрезка ствола в соответствии с длиной сортимента с учетом определенных прогнозных параметров дерева.
[025] Согласно частным вариантам реализации машины:
[026] - бесконтактная система измерений выполнена с возможностью: получения с видеокамер множества изображений деревьев с разных ракурсов в процессе сканирования и их обработки блоком обработки данных с построением цифровой модели каждого дерева на основе трапеции, характеризующей продольный срез дерева и получения с видеокамер множество изображений ствола, выходящего из валочно-раскряжевочной головки в процессе раскряжевки, и задания длины отрезка ствола на основании цифровой модели дерева путем измерения расстояния от среза ствола до контрольной точки валочно-раскряжевочной головки,
[027] - валочно-раскряжевочная головка содержит вальцы протяжки, сучкорезные ножи, валочное звено и пильный механизм,
[028] - видеокамеры с лазерными дальномерами установлены на кабине.
[029] В отличие от аналогов, в рассматриваемом изобретении бесконтактная система измерений с камерами и лазерными дальномерами реализует контроль параметров лесоматериала на всех этапах обработки, начиная с выбора дерева для валки без дополнительного использования контактных измерительных средств и с минимальным участием оператора. Это позволяет повысить точность измерения продукции при сортиментной лесозаготовке с одновременным увеличением ресурса измерительных приборов, повысить уровень автоматизации и облегчить работу оператору лесозаготовительной машины, который получает информацию о параметрах дерева, в том числе его ценности, до его валки.
[030] Краткое описание чертежей
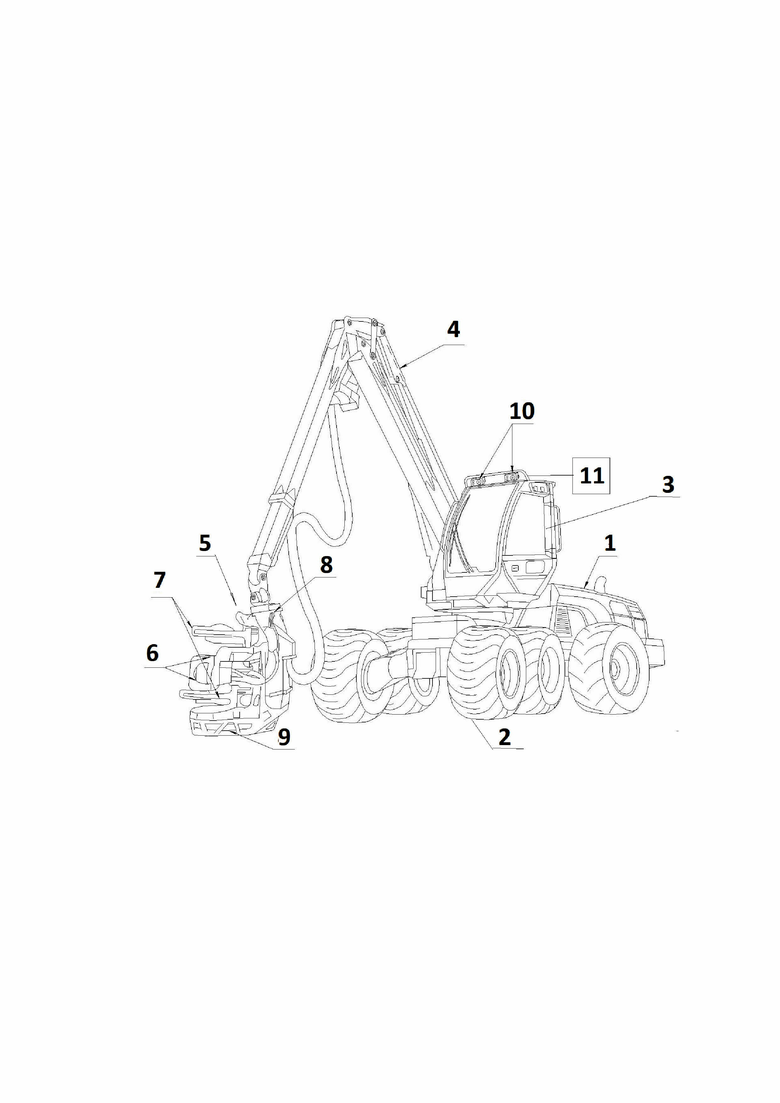
[031] Изобретение поясняется фигурой, где показана конструкция валочной машины.
[032] Конструктивные элементы обозначены на фигурах следующими позициями:
1 - валочная машина,
2 - ходовая часть,
3 - кабина,
4 - манипулятор,
5 - валочно-раскряжевочная головка,
6 - вальцы протяжки,
7 - сучкорезные ножи,
8 - валочное звено,
9 - пильный механизм,
10 - видеокамеры с лазерными дальномерами,
11 - блок обработки данных.
[033] Осуществление изобретения
[034] Рассматриваемая валочная машина (1) включает ходовую часть (2) (колеса или гусеницы), кабину (3) и манипулятор (4) (стрелу) с валочно-раскряжевочной головкой (5). Валочно-раскряжевочная головка (5) имеет вальцы протяжки (6), сучкорезные ножи (7), валочное звено (8) и пильный механизм (9). При этом в машине (1) также предусмотрена бесконтактная система измерения, включающая по меньшей мере две видеокамеры (10) с лазерными дальномерами, установленные на кабине (3), а также блок обработки данных (11). Блок (11) содержит программные и аппаратные компоненты, обеспечивающие расшифровку, хранение и обработку поступающих от видеокамер (10) данных, вывод сведений на экран (на фигуре не показан) в кабине (3) оператора и подачу команд автоматике системы управления валочной-раскряжевочной головкой (5).
[035] Валочная машина работает следующим образом.
[036] Оператор, находясь в кабине (3) валочной машины (1), приступает к выбору группы (массива) деревьев подлежащих валке. Выбрав область работы, он начинает при помощи манипулятора (4) приближать валочно-раскряжевочную головку (5), приведя ее в положение «захват дерева», в котором вальцы протяжки (6) раскрыты, сучкорезные ножи (7) раскрыты, а валочное звено (8) поднято. При приведении валочно-раскряжевочной головки (5) в положение «захват дерева» бесконтактная система измерений активируется и производит сканирование стоящих в зоне досягаемости манипулятора (4) с головкой (5) деревьев, выводя данные на экран оператора. Данные включают в себя породу каждого дерева, его геометрические параметры (диаметр в области среза и длина), общий объем хлыста, вид и количество сортиментов, получаемых из дерева, и стоимость дерева.
[037] Для получения указанных сведений бесконтактная система измерения при помощи видеокамер (10) с дальномерами делает снимки стоящих на корню деревьев в зоне досягаемости манипулятора валочной машины. Зона сканирования может составлять, например, 90° по 45° в каждую сторону от продольной оси кабины на расстоянии до 10 м от кабины. Снимок каждой видеокамеры (10) после обработки в блоке (11) представляет собой плоскую фигуру в виде трапеции, высота которой определяет высоту дерева, а площадь соответствует площади продольного разреза дерева. Поскольку используется по меньшей мере две камеры (10) они передают сразу несколько снимков одного и того же дерева с разных ракурсов. При этом съемка области ведется непрерывно при движении машины (1) и за несколько секунд блок (11) получает для анализа несколько тысяч снимков одного дерева, сделанных с разного расстояния и под разными углами. Это практически исключает ошибку в определении сечения дерева и его породы. С разных углов снимки дополняют друг друга, и трапеция сечения дерева получается более точной.
[038] На основании указанных изображений бесконтактная система измерений формирует цифровую модель каждого дерева, представляющую собой геометрическую фигуру - трапецию (продольный срез дерева, стоящего на корню), в которую параллельно основанию трапеции «встроен» отрезок равный расчетному диаметру среза дерева.
[039] Породу дерева система распознает с помощью алгоритма машинного обучения путем сравнения снимков из базы данных со снимками дерева по принципу нейросети. Если при определении породы дерева, система совершила ошибку, оператор сам присваивает породу. В дальнейшем количество ошибок будет уменьшаться за счет машинного обучения.
[040] Для определения стоимости дерева в блоке (11) системы заводится ценовая матрица для каждого сортимента каждой породы дерева на определенной делянке, например:
[041] Порода дерева - береза, сортименты:
[042] - ФАНКРЯЖ, диаметр<40 см, длина 300 см - цена 6000 руб./м3, диаметр 25-40 см, длина 400 см - цена 5000 руб./м3
[043] - БАЛАНС ЭКСПОРТНЫЙ диаметр 15-25 см, длина 450 см цена 3000 руб./м3
[044] - БАЛАНС диаметр 7-15 см, длина 350 см - цена 1500 руб./м3
[045] Предварительное определение стоимости дерева позволяет наиболее оптимально разделать ствол на сортименты и не нести убытки.
[046] На этапе сканирования блок обработки данных (11) бесконтактной системы отсеивает деревья, не подлежащие валке, с учетом геометрических параметров (диаметра и т.д.) и породы. На основании данных о продольном сечении дерева и его породе, а также заданных параметров продукции (длины и диаметра сортиментов), блок (11) системы измерения выводит на экран оператора полезную кубатуру дерева и количество сортиментов, которые из него могут получиться. В результате на экране оператора появляется обработанное видеоизображение делянки в выбранном секторе с данными кубатуры и количеством сортиментов, привязанное к каждому дереву, которое подходит для валки. Если происходит выборочная рубка, то эта информация позволяет оператору дать максимальную выработку продукции, так как машина определяет объем дерева и его стоимость гораздо точнее.
[047] Имея перед собой данные о нескольких деревьях в зоне сканирования бесконтактной системы, оператор выбирает наиболее подходящее с точки зрения цены и производственного задания, дерево и производит его валку.
[048] После спила и валки дерева при наличии дефекта в комлевой части (расщепление, нарост, дефект сердцевины и т.д.) оператор может произвести «закомлевку» ствола путем отрезания поврежденной части на небольшой длине.
[049] Далее валочно-раскряжевочная головка (5) переводится оператором в положение раскряжевки: вальцы протяжки (6) закрыты и охватывают ствол, сучкорезные ножи (7) закрыты и охватывают ствол, пильный механизм (9) убран в корпус головки (5), срез спиленного дерева находится перпендикулярно оси валочной головки в зоне выхода пильной шины, валочное звено (8) находится в горизонтальном положении. Ствол дерева при этом располагается горизонтально или под углом, если вершинка не упала при валке и находится на других деревьях. В этом положении осуществляется очистка ствола от сучьев с помощью ножей (7) и раскряжевка пильным механизмом (9) на сортименты в автоматическом режиме. Очистка от сучьев и раскряжевка происходят на волоке перед колесами или гусеницами валочной машины (1). Обычно направление протяжки дерева близко к перпендикулярному к волоку (траектории движения машины).
[050] При протяжке бревна через валочно-раскряжевочную головку в процессе раскряжевки видеокамеры (10) делают снимки бревна, выходящего из головки (5) со стороны шины пильного механизма. При этом блок обработки (11) определяет длину отрезка бревна в виде расстояния между комлем бревна и контрольной точкой валочно-раскряжевочной головки. Кроме того, блок (11) определяет диаметры бревна: наибольший фактический диаметр исходя из полученных изображений по снимкам и наименьший теоретический диаметр на основе ранее построенной цифровой модели в виде трапеции и измеренной длины вышедшего отрезка. Таким образом, бесконтактная система понимает, с какого диаметра можно вести отсчет длины сортимента и его объема. При этом блок (11) дополнительно «встраивает» фактический (измеренный) диаметр бревна в ранее построенную цифровую модель ствола, корректируя данные полученные при предварительном сканировании. На основании полученных сведений блок (11) дает команду на остановку протяжки и отрез пильным механизмом нужного сортимента. Вся информация об измерениях выдается на экран оператору, который контролирует работу автоматики машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРАБОТКИ ЛЕСОСЕК СО СМЕШАННЫМИ ХВОЙНО-ЛИСТВЕННЫМИ НАСАЖДЕНИЯМИ, ВКЛЮЧАЮЩИМИ ОСИНОВЫЕ ДЕРЕВЬЯ | 2020 |
|
RU2751006C1 |
| Способ выработки окоренных сортиментов и рабочий орган для его осуществления | 2019 |
|
RU2701336C1 |
| СПОСОБ ЗАГОТОВКИ СОРТИМЕНТОВ И КОНСТРУКЦИЯ МЕХАНИЗМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2741108C1 |
| Способ выработки окоренных сортиментов и рабочий орган для его осуществления | 2017 |
|
RU2676139C1 |
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ ПРИ ВЫСОКОМ УРОВНЕ СНЕЖНОГО ПОКРОВА | 2021 |
|
RU2768852C1 |
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ ПРИ ЗИМНЕЙ ЗАГОТОВКЕ ЛЕСА | 2023 |
|
RU2815346C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2009 |
|
RU2415564C1 |
| СПОСОБ ВАЛКИ ДЕРЕВЬЕВ В ЗИМНИЙ ПЕРИОД ХАРВЕСТЕРОМ | 2021 |
|
RU2769993C1 |
| СПОСОБ ОБРАБОТКИ ДЕРЕВЬЕВ, СКЛАДИРОВАННЫХ В ШТАБЕЛЕ | 2023 |
|
RU2819280C1 |
| СПОСОБ РАБОТЫ ВАЛОЧНО-СУЧКОРЕЗНО-РАСКРЯЖЕВОЧНОЙ МАШИНЫ | 2012 |
|
RU2492628C1 |
Группа изобретений относится к лесной промышленности, в частности к лесозаготовительным машинам. Валочная машина (1) для обработки лесоматериала содержит манипулятор (4) с валочно-раскряжевочной головкой (5), содержащей вальцы протяжки (6), сучкорезные ножи (7), валочное звено (8) и пильный механизм (9), и бесконтактную систему измерений, видеокамеры (10) с лазерными дальномерами, установленные на кабине (3), и блок обработки данных (11). Бесконтактная система измерений выполнена с возможностью сканирования стоящих на корню деревьев, находящихся в зоне валочно-раскряжевочной головки, и определения перед валкой прогнозных параметров каждого дерева, включающих геометрические размеры, породу, тип и количество сортиментов, и определения в процессе раскряжевки фактического диаметра среза ствола и задания длины отрезка ствола в соответствии с длиной сортимента с учетом определенных прогнозных параметров дерева. Выполняют захват и валку дерева с помощью валочно-раскряжевочной головки, очистку ствола от сучьев и его раскряжевку на сортименты при протяжке ствола через валочно-раскряжевочную головку под контролем бесконтактной системы измерения. Повышается уровень автоматизации лесозаготовительных работ, повышается точность определения характеристик лесоматериала, исключается необходимость калибровки валочной головки, увеличивается выработка машины и сокращается время простоя. 2 н. и 6 з.п. ф-лы, 1 ил.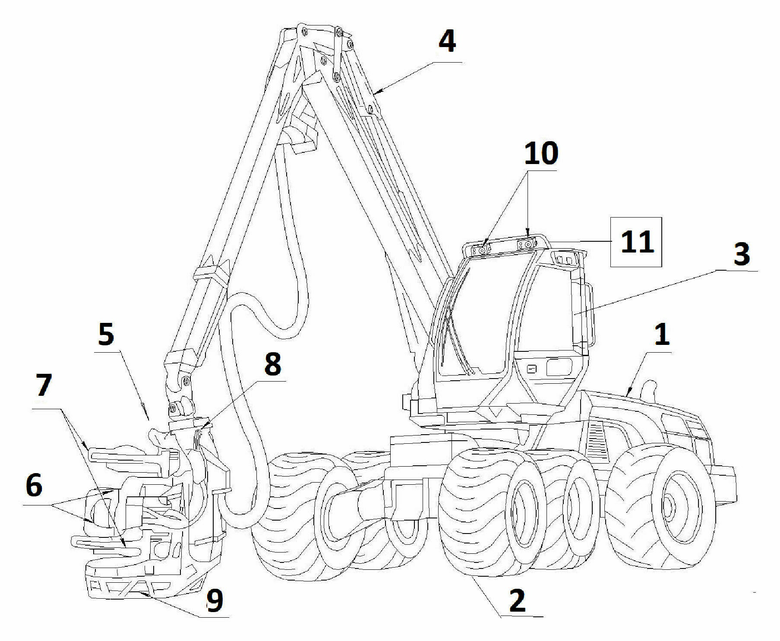
1. Способ обработки лесоматериала с использованием валочной машины (1), содержащей манипулятор (4) с валочно-раскряжевочной головкой (5) и бесконтактную систему измерений, имеющую по меньшей мере две видеокамеры (10) с лазерными дальномерами и блок обработки данных (11), при этом способ включает сканирование с помощью бесконтактной системы измерений стоящих на корню деревьев, находящихся в зоне валочно-раскряжевочной головки (5), и определение прогнозных параметров каждого дерева, включающих геометрические размеры, породу, тип и количество сортиментов, выбор дерева для валки на основании результатов сканирования, захват и валку дерева с помощью валочно-раскряжевочной головки (5), очистку ствола от сучьев и его раскряжевку на сортименты при протяжке ствола через валочно-раскряжевочную головку (5) под контролем бесконтактной системы измерения, которая определяет фактический диаметр среза ствола в процессе раскряжевки и отмеряет длину отрезка ствола с учетом прогнозных параметров дерева, задавая длину сортимента.
2. Способ по п.1, в котором сканирование предусматривает получение множества изображений деревьев с видеокамер (10) с разных ракурсов и их обработку блоком обработки данных (11) с построением цифровой модели каждого дерева на основе трапеции, характеризующей продольный срез дерева.
3. Способ по п.2, в котором породу дерева определяют блоком обработки данных (11) с помощью алгоритма машинного обучения путем сравнения изображений из базы данных с полученными с видеокамер (10) изображениями.
4. Способ по п.3, в котором тип и количество сортиментов определяют блоком обработки данных (11) на основании цифровой модели дерева и данных о его породе, причем с учетом типа и количества сортиментов дополнительно определяют прогнозную стоимость дерева на основании заданной ценовой матрицы.
5. Способ по любому из пп.1-4, в котором прогнозные данные для каждого дерева выводят на экран оператора валочной машины (1) для выбора дерева, подлежащего валке.
6. Способ по п.2, в котором в процессе раскряжевки блок обработки данных (11) получает с видеокамер (10) множество изображений ствола, выходящего из валочно-раскряжевочной головки, а длину отрезка ствола блок обработки данных (11) задает на основании цифровой модели дерева путем измерения расстояния от среза до контрольной точки валочно-раскряжевочной головки.
7. Валочная машина (1) для обработки лесоматериала, содержащая манипулятор (4) с валочно-раскряжевочной головкой (5), содержащей вальцы протяжки (6), сучкорезные ножи (7), валочное звено (8) и пильный механизм (9), и бесконтактную систему измерений, включающую по меньшей мере две видеокамеры (10) с лазерными дальномерами, установленные на кабине, и блок обработки данных (11), причем бесконтактная система измерений выполнена с возможностью: сканирования стоящих на корню деревьев, находящихся в зоне валочно-раскряжевочной головки, и определения перед валкой прогнозных параметров каждого дерева, включающих геометрические размеры, породу, тип и количество сортиментов, и определения в процессе раскряжевки фактического диаметра среза ствола и задания длины отрезка ствола в соответствии с длиной сортимента с учетом определенных прогнозных параметров дерева.
8. Машина по п.7, в которой бесконтактная система измерений выполнена с возможностью: получения с видеокамер (10) множества изображений деревьев с разных ракурсов в процессе сканирования и их обработки блоком обработки данных (11) с получением цифровой модели каждого дерева на основе трапеции, характеризующей продольный срез дерева, получения с видеокамер (10) множества изображений ствола, выходящего из валочно-раскряжевочной головки (5) в процессе раскряжевки, и задания длины отрезка ствола на основании цифровой модели дерева путем измерения расстояния от среза ствола до контрольной точки валочно-раскряжевочной головки.
| WO 2006126952 A2, 30.11.2006 | |||
| СПОСОБ ОБМЕРА ЛЕСОМАТЕРИАЛА И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2653111C2 |
| Способ и устройство для производства рентгеновских снимков короткой продолжительности | 1926 |
|
SU5395A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЛЕСОТЕХНИЧЕСКОЙ МАШИНОЙ | 2010 |
|
RU2628587C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |

