Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству управления лесотехнической машиной. В частности, изобретение относится к операциям мониторинга и/или управления водителя и/или лесотехнической машины, и/или к руководству водителем в связи с использованием лесотехнической машины.
Уровень техники
В процессе работы лесотехнической машины выдаются результаты измерений и/или информация, описывающая рабочее состояние множества различных элементов. В частности, системы управления современной лесотехнической машины, построенные на CAN-шине (Controller Area Network - сеть распределенных контроллеров) или другой шине передачи данных, позволяют реализовать на практике систему сбора данных, охватывающую всю машину, даже простым вводом в действие программного обеспечения и/или программного продукта. Далее, при необходимости лесотехническая машина может быть оснащена специальными дополнительными датчиками для этой конкретной цели.
Обычно эти результаты измерений и/или информация, описывающая рабочее состояние, использовались для определения необходимости регулировки или ремонта и техобслуживания, как описано в патентной заявке FI 20055266.
Однако традиционная практика имела тот дефект и недостаток, что при использовании таких данных и информации игнорировались значимые факторы, влияющие на производительность. Главная причина этого, возможно, в том, что по традиции внимание сосредотачивали исключительно на мониторинге состояния машины и на решениях, связанных с мониторингом чисто технологических эксплуатационных характеристик машины.
В частности, одна из проблем заключается в том, что даже при возможности обеспечить водителя обширными сведениями и материалами для обработки, их интерпретация, по крайней мере, в значительной части - или полностью оставалась работой водителя. Общеизвестно, однако, что водитель лесотехнической машины в течение длительного времени непрерывно подвергается воздействию мощного потока информации и других факторов ментального стресса и что в реальных условиях лишь изредка выполняется достаточно точный анализ указанного материала.
Раскрытие изобретения
Таким образом, задача настоящего изобретения заключается в том, чтобы предложить способ и устройство, а также программное обеспечение и программный продукт, осуществляющие этот способ так, чтобы это позволяло решить вышеуказанные проблемы. Решение этой задачи достигается способом и системой, отличающимися признаками независимых пунктов формулы. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы.
Преимуществом способа и системы согласно изобретению является значительно более высокая производительность, чем в традиционных решениях, поскольку учитывается и человеческий фактор, влияющий на производительность. Кроме того, способ согласно изобретению способен руководить водителем, побуждая его или ее изменить образ действий и/или приемы работы для достижения лучшего конечного результата, например, меньшего потребления горючего и/или более высокой производительности. Далее, решения согласно изобретению позволяют улучшить мониторинг сочетания операций лесотехнической машины и ее водителя. Машина может также исследовать и определять потребности пользователя и способна адаптироваться, например, к быстроте действий водителя. При необходимости машина способна идентифицировать явную ошибку или неудачное действие пользователя, и машина может даже принудительно управлять одной или несколькими операциями, если это сочтено предпочтительным в плане общего использования машины.
Изобретение позволяет усовершенствовать работу машины и ее системы управления благодаря тому, что данные, описывающие действия водителя или взаимодействие водителя и машины, используются в качестве базовых, так что машина автоматически регулирует один или несколько параметров управления для достижения более предпочтительных характеристик работы лесотехнической машины, например, меньшего потребления горючего или более высокой производительности.
Краткое описание графических материалов
Ниже изобретение описывается подробно со ссылкой на предпочтительные варианты осуществления, сопровождаемые фигурами, на которых:
ФИГ.1 представляет вариант осуществления способа;
ФИГ.2 показывает применение гидравлического датчика;
ФИГ.3 представляет другой вариант осуществления способа;
ФИГ.4 представляет вариант осуществления индикатора потребления горючего;
ФИГ.5 представляет другой вариант осуществления индикатора потребления горючего;
ФИГ.6 показывает вариант осуществления способа представления использования контроллеров;
ФИГ.7 представляет еще один вариант осуществления способа;
ФИГ.8 представляет вариант осуществления конструкции устройства и
ФИГ.9 уточняет вариант осуществления конструкции устройства.
Осуществление изобретения
Изложенные ниже варианты осуществления относятся к лесотехническим машинам. В данном контексте к лесотехническим машинам относятся, например, лесозаготовительная машина, форвардер, трелевочная машина, валочно-пакетирующая машина, сучкорезно-раскряжевочная машина или их комбинации. В частности, решения согласно настоящему изобретению пригодны для манипуляторной лесозаготовительной машины, в которой работа водителя сопряжена с выполнением многочисленных точных движений, призванных согласовать требования высокой скорости с одновременным отслеживанием качества обрабатываемого лесоматериала. Так, например, управление стрелой, краном или погрузчиком лесотехнической машины требует от водителя высокой точности, а с другой стороны, отслеживание качества обрабатываемого лесоматериала в ходе лесозаготовки критически важно в плане экономических результатов лесозаготовки, имея в виду интересы как собственника леса, так и лесотехнической компании. Таким образом, было установлено, что работа водителя лесотехнической машины может быть весьма интенсивной и напряженной как психологически, так и физиологически, в особенности, при работе в неблагоприятных условиях.
Система управления лесотехнической машины включает центральный блок управления и блоки управления, связанные с ним какими-то линиями передачи данных. В лесотехнической машине может использоваться, например, шина CAN, шина Archnet или другая соответствующая шина для обмена информацией в реальном времени или существенно обновленной информацией между блоками управления. Такая шина позволяет передавать разного рода результаты измерений в центральный блок управления лесотехнической машиной. Возможно также включение блоков управления в систему управления лесотехнической машиной, и эти блоки, даже будучи, как правило, физически распределены по разным местам машины, могут быть выполнены для местной обработки собираемых данных еще до выдачи этих данных, с последующей их передачей по шине. Обычно это соответствует цели достижения режима максимально возможной реальности времени при поддержании минимально возможной загрузки шины. Также и в плане аппаратного и программного обеспечения блоки управления могут быть специально и максимально адекватно оснащены для выполнения их вышеупомянутых задач.
Если должны отслеживаться операции водителя, группа особенно интересных параметров включает данные, полученные с водительского пульта управления и/или джойстиков, а также команды управления, обычно передаваемые через человеко-машинный интерфейс. Посредством операций управления водитель может управлять, например, поворотом, сгибанием, подъемом, удлинением/складыванием стрелы или поворотом поворотного устройства, а также открытием/закрытием захвата. В случае лесозаготовительной машины количество команд, вводимых водителем, может, далее, значительно возрасти при управлении многочисленными операциями валочной головки, и, например, при вводе типов деревьев и параметров предварительного выбора, в большинстве случаев осуществляемом с клавиатуры. Информация об этих операциях управления может регистрироваться в блоке управления машиной.
Передвижение/вождение лесотехнической машины на местности сопряжено с использованием различных данных, из которых одни создаются водителем, а другие, по крайней мере, косвенно связаны также с другими факторами, например, с рельефом местности. Управляющие данные, связанные с водителем и генерируемые водителем, включают, например, данные, полученные с передней и задней педалей, направление движения и диапазон скорости машины, данные о работающем тормозе и о стопоре рамы, управляющие данные стыка рамы и обороты двигателя. Некоторые машины оснащены также датчиками, благодаря чему данные, полученные от датчиков, позволяют отслеживать, например, зону перемещения и положение одной или нескольких рам, осей и/или кабин управления машины. Такого типа датчики, например, гироскопические или угломерные, а также различные акселерометры и датчики положения, часто используются, например, при активном выравнивании и стабилизации кабины управления или всей рамы лесотехнической машины.
Данные, полученные от двигателя, могут включать, например, крутящий момент, текущее потребление горючего, длительное потребление горючего, потребление горючего на единицу развитой мощности, процент нагрузки при используемой скорости, требуемую эксплуатационную скорость. Далее, в зависимости от имеющегося оборудования, от лесотехнической машины могут быть получены другие полезные и связанные с работой данные измерений, - такие, как вес груза, воздействующий на стрелы в определенный момент времени, или груза, находящегося в грузовом пространстве машины, или данные разнообразных датчиков ускорения. В особенности, существующие маленькие акселерометры легко могут быть встроены даже в несколько различных частей машины или стрелы, если должны детально отслеживаться зоны перемещения этих частей. Возможно также для нескольких различных операций, к примеру, для всех стадий разгрузки крана или погрузчика, предусмотреть, например, оснащение датчиками линейного перемещения или наклона. Примерами таких операций могут служить поворот, подъем, складывание и выдвижение стрелы крана.
В одном из вариантов осуществления настоящего изобретения одна или несколько операций машины могут быть смоделированы или автоматически выполнены в связи с работами по ремонту и техобслуживанию. Примером моделируемой операции может служить, в частности, функция подачи валочной головки или, альтернативно, например, использование тяговой передачи при определенных скоростях движения и при известной нагрузке. В этом случае возможно, например, в процессе ремонта и техобслуживания или иных вспомогательных работ на лесотехнической машине, замерить состояние или относительные эксплуатационные характеристики машины, выполнив перемещения, определяемые гидравликой, с одновременным замером в качестве параметров, например, давления по датчикам давления лесозаготовительной машины и крутящего момента дизельного двигателя по CAN-шине. К примеру, датчик расхода, связанный с системой передачи данных и управления лесотехнической машины, может быть размещен в предназначенном для него месте в гидравлической системе для измерений длительности предназначенных к выполнению операций. В новых машинах могут также быть заложены графики изменений, в зависимости от подходящей опорной величины, таких параметров, как давление, Нм, Q или мА, при соответствующих операциях. Результаты замеров, полученные в процессе реальной работы, могут быть сопоставлены с результатами модельных замеров, и могут быть выведены заключения о том, нужна или нет корректировка работы машины и/или водителя.
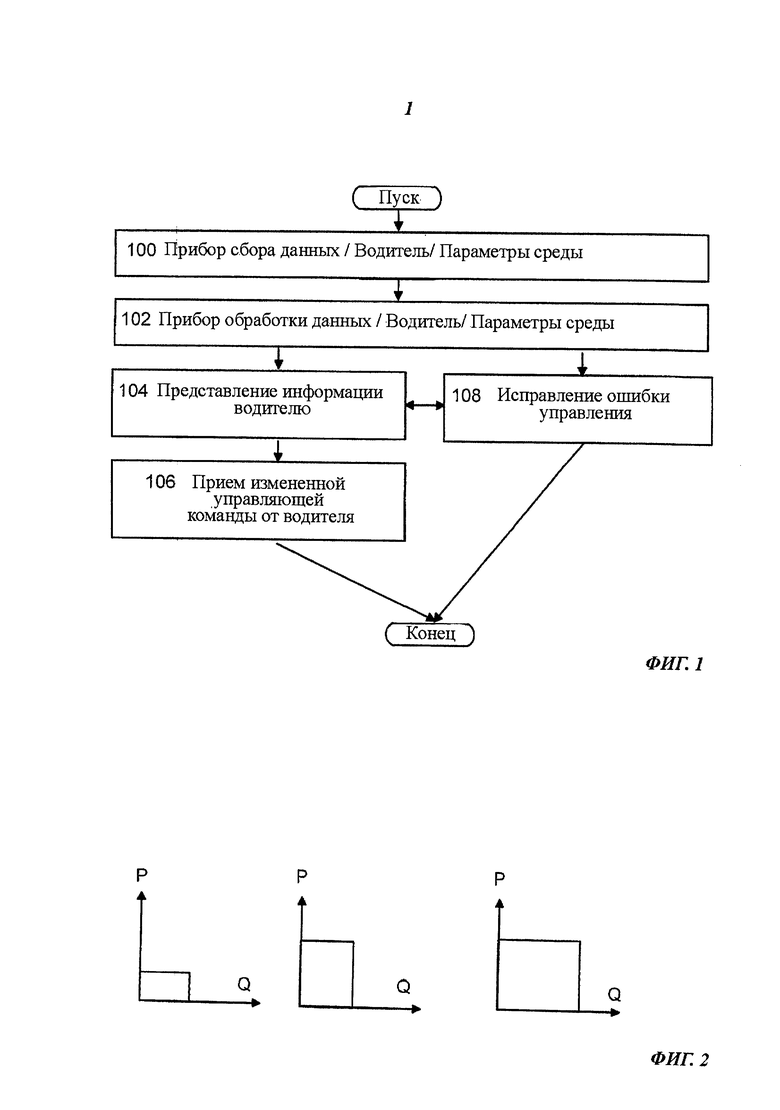
ФИГ.1 представляет вариант осуществления способа.
На шаге 100 на лесотехнической машине замеряются значения одного или нескольких параметров, которые должны быть переданы в систему управления.
Такой параметр может быть приборным параметром, значение которого может быть получено, например, с измерителя или датчика для анализа технической операции машины. Этот параметр может, например, указывать давление в гидравлической системе, скорость движения машины, температуру какой-то подсистемы, потребление горючего или электрическое напряжение в какой-то подсистеме. Значения параметров могут быть переданы для сохранения в систему управления устройства.
Измеряемый параметр может также быть характеристикой водителя, например, командой управления, описывающей операцию управления, выполняемую водителем. Это может быть операция управления, выполняемая, например, с использованием джойстика, клавиатуры или педалей. Характеристика водителя может также представлять собой параметр, замеряемый отдельно с использованием датчиков, для того чтобы определить физическое состояние водителя, например, темп сердечных сокращений, колебания частоты пульса или другие соответствующие параметры.
Далее, измеряемый параметр может быть характеристикой среды, т.е. описывать операционную среду лесотехнической машины; например, это могут быть данные по ускорению или положению, характеристики местности, полученные, например, от гироскопического датчика, или достаточно точные GPS-данные местоположения. Предпочтительно, характеристики среды могут также включать уклон местности в продольном направлении относительно направления движения машины, который может быть замерен, например, с использованием имеющихся датчиков выравнивания крана или кабины управления. Характеристикой среды могут также быть результаты измерений или информация о типе деревьев, полученная от измерительного прибора лесозаготовительной машины и/или от водителя. В одном из вариантов осуществления характеристикой среды является параметр, замеренный, например, с использованием технологии лазерного сканирования или другой бесконтактной технологии определения, например, расположения, размеров или количества деревьев или препятствий на местности вокруг машины. Далее, по отношению к машине, данные по грузам, обеспечиваемые весами погрузчика и указывающие вес груза, например, пачки деревьев, переносимой погрузчиком, также могут рассматриваться как характеристика среды.
На шаге 102 анализируются и обрабатываются характеристики, собранные на шаге 100. При этом к обработке относится, например, сравнение замеренных значений с заранее заданными граничными значениями, расчет/генерирование производных величин, генерирование информации для представления, вывод заключений и обеспечение необходимых операций управления.
На шаге 104 соответствующая информация представляется водителю. Эта информация может быть представлена пользователю, например, визуально, в звуковой или иной соответствующей форме, чувственно воспринимаемой водителем. Представляемая информация может включать данные, замеренные на шаге 100, и/или информацию, обработанную далее на шаге 102.
В способе согласно одному из вариантов осуществления есть возможность замерить на шаге 100 давление (бар) и/или объемный расход (л/мин) в гидравлической системе машины. Эти замеры могут быть выполнены, например, путем оценки электрических сигналов управления, передаваемых на гидравлический насос, на клапан - или в систему - регулировки давления; или результаты измерений могут быть сняты с датчиков давления, размещенных, например, в зоне гидравлического насоса или в другой подходящей точке гидравлической системы.
На шаге 102 вышеупомянутые гидравлические параметры могут быть проанализированы и из них может быть получена дальнейшая обработанная информация. В одном из вариантов осуществления может быть сформировано в качестве расчетного параметра произведение давления, производимого насосом, и объемного расхода гидравлической системы; это произведение описывает существенно мощность, развиваемую данной гидравлической системой.
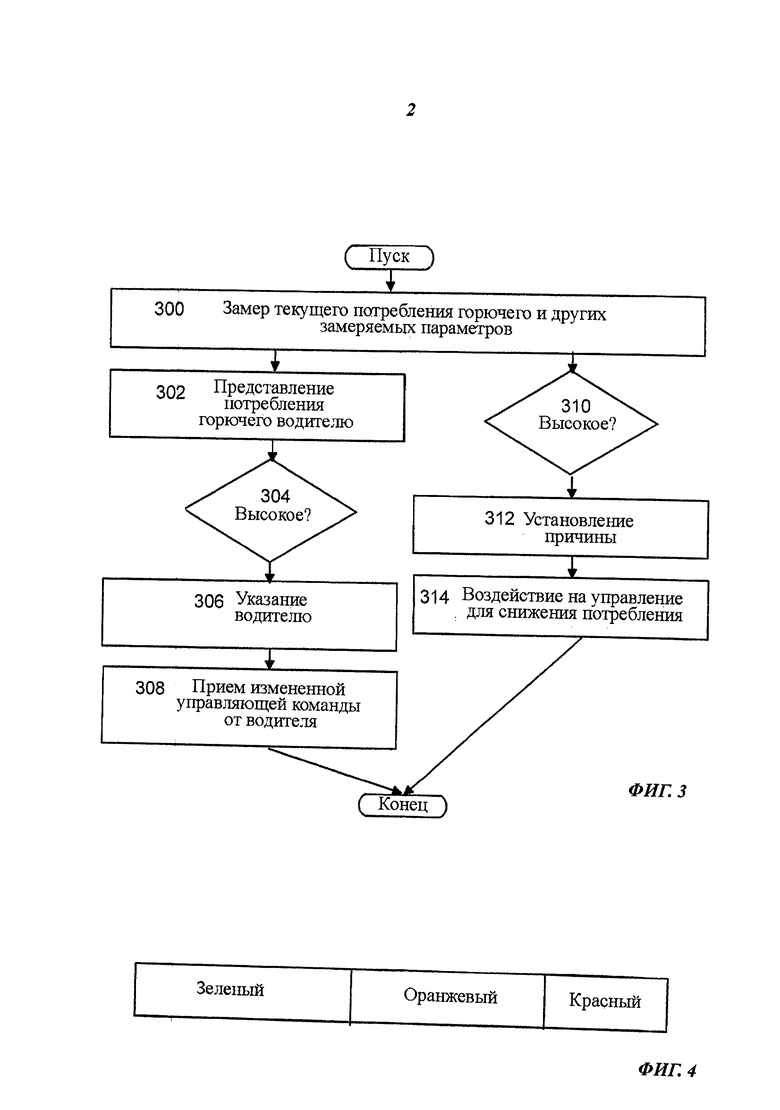
На шаге 104 водителю демонстрируется использование гидравлики. Эта демонстрация может выполняться, например, визуально через пользовательский интерфейс системы управления лесотехнической машины, чаще всего - дисплей с соответствующей прикладной программой. На ФИГ.2 показан один вариант такого визуального представления. На ФИГ. в координатах P-Q представлены три различных ситуации использования гидравлики. По горизонтальной оси системы координат отложен объемный расход Q гидравлической жидкости (например, в л/мин), а по вертикальной оси - соответствующее давление Р (например, в бар) гидравлической жидкости. Произведение данного объемного расхода, описывающего рабочую точку системы, и давления соответствует мощности, требуемой для работы гидравлической системы в данное время. С другой стороны, в показанной системе координат площадь прямоугольника, образованного уровнями давления и объемного расхода, указывает уровень нагрузки гидравлической системы.
В представленной слева координатной сетке и давление, и объемный расход находятся на относительно низком уровне, поэтому и площадь прямоугольника тоже мала. Помимо малой площади прямоугольника это может быть указано пользователю и проиллюстрировано цветом, например, зеленым. На средней координатной сетке давление значительно выше, чем на левой, поэтому здесь требуемая мощность гидравлической системы уже выше, чем на графике слева. Помимо увеличенной площади прямоугольника это может быть проиллюстрировано пользователю цветом, например, оранжевым или желтым. На правой координатной сетке и давление, и объемный расход находятся на высоком уровне, и площадь прямоугольника довольно велика, что может быть, далее, проиллюстрировано окрашиванием прямоугольника, например, в красный цвет.
Как упоминалось выше, в дополнение к графическому представлению, подобному тому, что показано на ФИГ.2, можно при необходимости указать водителю причину того, что гидравлика находится на высоком уровне. Это, в особенности, осуществимо, если система управления машины способна путем анализа проведенных ею замеров и данных, описывающих работу машины, заключить, что высокая нагрузка гидравлики может быть вызвана ошибочными или необязательными управляющими операциями, произведенными пользователем.
Демонстрация на шаге 104 может выполняться в нескольких различных режимах. В одном из вариантов осуществления информация представляется водителю непрерывно. В другом варианте демонстрация осуществляется, когда один или несколько параметров выходят за пределы заранее заданных граничных значений. В примере на ФИГ.2 такое граничное значение может быть граничным значением, установленным для Р, граничным значением, установленным для Q, или граничным значением, установленным для площади прямоугольника. В одном из вариантов демонстрация водителю осуществляется, только когда выполняется соответствующая фаза работы. Как правило, визуализация PQ, описывающая, например, нагрузку гидравлической системы, целесообразна для представления в том случае, когда используется стрела лесотехнической машины, так как гидравлическая система стрелы чаще всего бывает так называемой системой с регулируемым гидроприводом (Load-sensing system - система с регулируемым гидроприводом, LS-система). Такая LS-система отличается тем, что ее относительная энергоэффективность (отношение мощности, затрачиваемой на выполнение работы, например, на погрузку деревьев, к мощности, отбираемой гидравлической системой от источника энергии лесотехнической машины) резко снижается, если операции, подлежащие одновременному выполнению, требуют сильно различающихся друг от друга уровней давления. В такой ситуации водитель, благодаря визуализации PQ, может определить, например, что запуск какой-то одной операции, требующей лишь незначительного объемного расхода, может вызвать скачкообразное нарастание давления (Р) LS-системы до уровня, превышающего требуемый для других операций, а это приведет к ненужно высокому потреблению энергии. В традиционных системах водитель практически не имел других возможностей определить такие колебания нагрузки, кроме как отслеживая изменение уровня шума, производимого источником питания лесотехнической машины, чаще всего - дизельным двигателем, и падение числа оборотов. Примером может служить ситуация, когда водитель по каким-то причинам удерживает активированной функцию закрытия захвата погрузчика, даже несмотря на то, что захват остается закрытым и без непрерывного нажатия соответствующей кнопки. Но эта функция поддерживает давление LS-системы на высоком уровне, хотя использует очень низкий объемный расход - или вообще нулевой.
Представляемая информация может также содержать специализированную информацию для управления. Использование гидравлической системы, как можно заметить на примере показа использования гидравлики, представляется водителю так, что можно увидеть долю каждой операции управления, выполненной водителем, в общем использовании гидравлики. Возможно также в случае, если какая-то операция управления приводит к ненужно большому использованию гидравлики, указать на это пользователю.
На шаге 106 способа на ФИГ. 1 при необходимости принимается от пользователя измененная команда управления; эта измененная команда управления оптимизирует нагрузку какой-то подсистемы машины, например, снижает нагрузку на гидравлическую систему. Такая система управления может также быть выполнена для обеспечения того, что никакая отдельная функция не является настолько чувствительной, чтобы оттянуть на себя мощность гидравлической системы за счет других функций, как это происходит в традиционных системах. Хороший пример в этом плане - использование различных степеней разгрузки, например, стрелы или крана. Другими словами, желательно, чтобы функция, начинающаяся с низкого давления, но требующая большого объемного расхода, не использовала объемного расхода неоправданной величины, что привело бы к существенному замедлению или даже к полной остановке выполнения других функций, независимо от управляющих команд водителя. Другими целевыми параметрами, подлежащими оптимизации, могут быть, например, потребление горючего (текущее/долгосрочное), механические нагрузки на машину, шумовое воздействие на водителя или окружающую машину среду, вибрационное воздействие на водителя, выброс выхлопных газов двигателя, потребность в работах по ремонту и техобслуживанию машины, оптимизация работы водителя с учетом его опыта или быстроты действий - или соответствующие количественные величины.
Таким образом, ветвь 104-106 ФИГ.1 является интерактивной между машиной и пользователем, при этом машина представляет информацию водителю и ждет адаптации операций водителя на основе этой информации.
На ФИГ.1 показана также другая ветвь 108 способа, которая может применяться независимо или может быть связана с раскрытым выше шагом 104 способа.
Если анализ параметров на шаге 102 показывает, что работа или управление машины нуждается в улучшении, ошибочная команда управления может быть исправлена согласно шагу 108 независимо от пользователя и без уведомления пользователя. Альтернативно, неудачно сложившаяся ситуация может быть опознана и представлена на шаге 104 водителю, которому может быть дано некоторое время определенной длительности на исправление неудачной операции. Водителю может быть также выдан запрос на разрешение машине автоматически выполнить исправляющую операцию. К примеру, более сильное нажатие на кнопку или на управляющий орган - или отвод его дальше от нейтрального положения может интерпретироваться как решение водителя отменить/игнорировать автоматическую/адаптивную операцию машины. Практически можно через пользовательский интерфейс системы управления подобрать адаптивность системы управления - например, выбором низкого, среднего или высокого уровня адаптивности/активности системы - так, чтобы система действовала желательным образом; в этом случае и машина ведет себя желательным образом, и частота/активность вмешательств в работу машины ее системы управления находится на желательном уровне. Такие установки могут быть интегрированы в специализированные водительские установки системы управления вместе с другими установками, например, регулировками погрузчика, задержками и линейными нарастаниями сигналов и т.д.; в этом случае они соответствуют квалификации водителя и уровню эксплуатационных характеристик. Аналогично, система управления может быть приспособлена, например, для увеличения адаптивности или активности при обнаружении вполне обычного снижения быстроты действий водителя, к примеру, в ходе рабочей смены.
В приложении к вышеописанному примеру с гидравликой: если, на основе измерений параметров на шаге 100, система управления машины на шаге 102 обнаружила, что гидравлическая система машины нагружена, система управления может, проанализировав текущие операции лесотехнической машины, выявить и указать часть оборудования или операцию, вызвавшую увеличение нагрузки на гидравлику. Такое увеличение нагрузки может быть вызвано, например, ошибочной или необязательной операцией, выполненной пользователем. Одной из таких необязательных операций, без необходимости использующей гидравлику, может быть, например, сохранение водителем включенной функции закрытия захвата даже тогда, когда захват на дереве уже закрыт; во всяком случае, сохранение активности этой функции нежелательно.
На шаге 108 устройство может непосредственно адаптироваться к этой ситуации и, после определения необязательности закрытия захвата, отключить эту функцию. Разумеется, функция открытия/закрытия захвата может также осуществляться датчиками; при этом возможно также отследить, остается ли захват закрытым в случае, например, большого груза. Здесь также можно запросить подтверждение принятия пользователем такой автоматической адаптивности машины. Машина может опять, например, визуально или голосовой информацией, указать пользователю на использование функции адаптации.
Соответственно, возможно также определить другие нежелательные методы или ситуации использования машины, в которых из-за действий водителя машина переводится в рабочую точку, невыгодную, например, в плане экономии горючего. Как правило, например, при использовании крана или погрузчика, одновременное выполнение определенных операций на высокой скорости может привести к тому, что гидравлическая система лесотехнической машины и, следовательно, источник питания, чаще всего - ее дизельный двигатель, могут быть подвергнуты воздействию скачкообразной и большой нагрузки.
Далее, использование весовой информации, полученной, например, с весов погрузчика, для управления погрузчиком или краном форвардера или лесозаготовительной машины позволяет осуществлять более точную и эффективную погрузку. Другими словами, при управлении перемещениями легко нагруженного погрузчика или крана можно использовать менее активные операции управления для достижения той же скорости перемещения. Аналогично, весовая информация, полученная с весов погрузчика, может также быть использована, например, для управления усилием захвата лесозаготовительной машины посредством регулировки явно достаточного давления прижима лезвий и валков в данный момент времени с целью достижения минимально возможного трения между обрабатываемым деревом и валочной головкой, с одновременным обеспечением прочной фиксации дерева в захвате и точности измерений. Из веса обрабатываемого дерева и положения наклонной рукояти, описывающих силовую реакцию на подвод мощности, можно вывести оптимальную мощность прижима лезвий и валков.
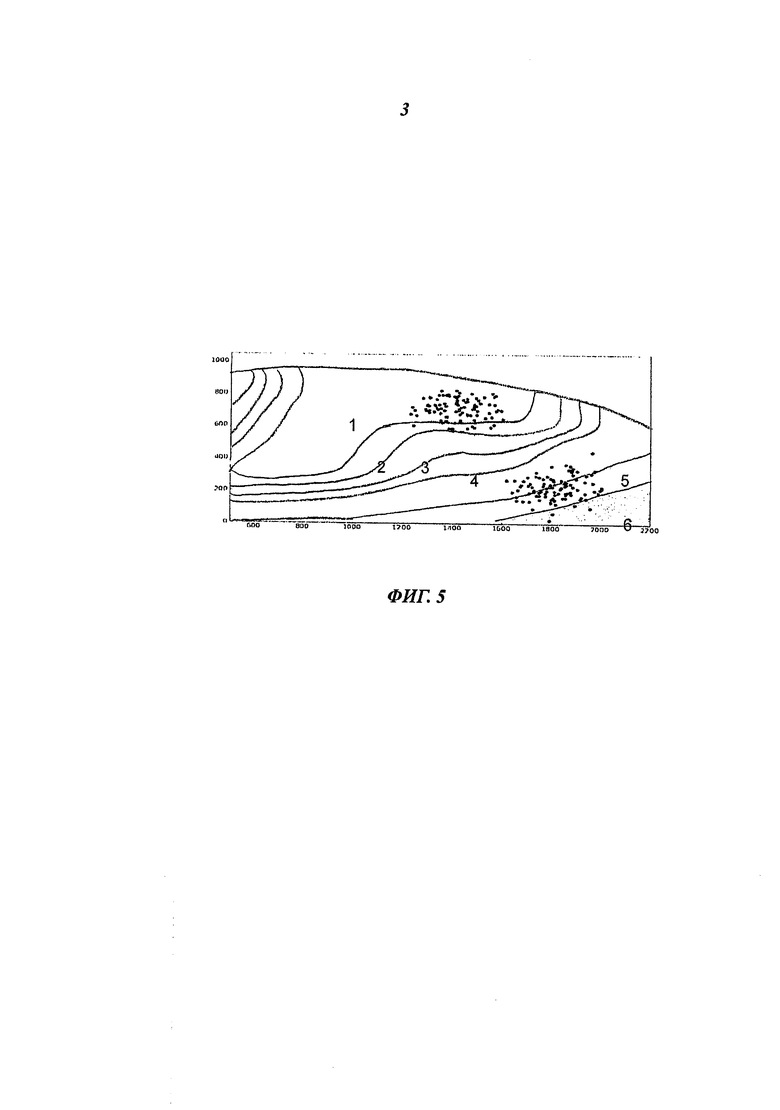
ФИГ.3 представляет другой вариант осуществления способа. В этом варианте задача состоит в оптимизации потребления горючего лесотехнической машиной в процессе ее использования.
На шаге 300 замеряется текущее потребление горючего машиной. В это же время замеряются другие параметры управления устройства и другие величины, описывающие рабочее состояние машины. Используя модельную информацию, которая может формироваться заранее и сохраняться в системе управления, можно оценить, насколько каждая выполненная машиной операция влияет на данное потребление горючего в зависимости от времени.
На шаге 302 потребление горючего представляется пользователю. Это представление может быть выполнено визуально, например, в виде столбчатой диаграммы, как на ФИГ.4. Диаграмма показывает потребление тремя разными цветами, например, зеленым, оранжевым и красным. Если потребление представлено зеленым цветом, уровень потребления можно считать нормальным. Если потребление представлено оранжевым цветом, потребление выше нормального, и работа машины или действия водителя могут нуждаться в некоторой корректировке. Если же индикатор красный, потребление завышено и водитель действительно должен изыскать корректирующие действия, чтобы снизить потребление, например, изменив собственные действия или проверив соответствующие условия работы машины. Высокое потребление может быть вызвано, например, нарушением одной или нескольких функций лесотехнической машины, снижением ее эксплуатационных характеристик или, с другой стороны, ненужно высокой нагрузкой на гидравлическую систему, причина которой в неопытности водителя и его или ее приемах работы. В устройстве согласно настоящему изобретению можно даже соотносить потребление горючего, представляемое в данный момент времени, с рабочей операцией, выполняемой в рассматриваемый момент. В частности, в случае лесозаготовительной машины это может быть осуществлено, например, сравнением описывающей рабочую операцию величины и ее оценки на основе данных о диаметре и скорости перемещения дерева, подаваемого сквозь валочную головку, с текущим потреблением горючего. Разумеется, соответствующее сравнение и/или исследование может быть выполнено с использованием текущих значений, однако чаще всего более надежные результаты дает именно сравнение выходных характеристик и потребления горючего за длительный срок. Однако в некоторых случаях и ситуациях может, быть полезно снабжать водителя информацией и о текущих значениях, на основе которых он или она может регулировать его или ее образ действий, к примеру, отслеживая таким образом влияние, например, регулировки усилия прижима сучкорезных ножей в валочной головке или подающих роликов на потребление горючего.
Если на шаге 304 определяется, что потребление велико, водителю может быть дано более точное указание возможной причины такого большого потребления, как показано на шаге 306. Это позволяет водителю принять меры по управлению, что соответствует шагу 308.
В качестве альтернативы такому интерактивному регулированию с участием водителя машина может на шаге 310 независимо определить, что потребление горючего машиной велико для выполненной операции. После того как система управления на шаге 312 установила причину такого большого потребления, на шаге 314 могут быть независимо выполнены одна или несколько операций управления без участия водителя.
ФИГ.5 иллюстрирует представление потребления горючего водителю, при этом по оси X отложена рабочая скорость двигателя, а по оси Y - крутящий момент двигателя. На ФИГ. показаны различные области значений удельного потребления горючего, пронумерованные так, что область 1 представляет наинизшее потребление, а область 6, соответственно, - наивысшее. Такая диаграмма всегда специфична для конкретного двигателя, и в случае новых дизельных двигателей, как правило, может быть в основных чертах модифицирована для каждого применения посредством модифицирования конкретного графика впрыска топлива. На практике график впрыска может быть модифицирован изготовителем двигателя в рамках действующих в данное время предельных норм по выбросам и технологических возможностей двигателя.
На ФИГ. показаны два набора точек, относящихся к потреблению в ходе определенных стадий работы. Эти наборы точек, относящихся к разным стадиям работы, могут быть, например, выделены разными цветами.
На диаграмме потребление текущей стадии работы может быть показано точкой, отличающейся от остальных точек набора, например, большим размером или другим цветом, чтобы водитель легко мог отличить текущую рабочую точку от исторических данных. Поэтому водителю легко увидеть, эксплуатируется ли двигатель лесотехнической машины в предпочтительной в плане потребления горючего области и/или рабочей точке или нет. Другими словами, водитель может, например, изменить рабочие циклы двигателя, если, исходя из истории потребления горючего, выяснится, что текущее потребление машины, например, ненужно велико для выполняемой рабочей операции. При необходимости машина может также направить водителя на поиск причины такого большого потребления. С другой стороны, возможно также заложить в источник питания лесотехнической машины несколько различных графиков впрыска, адаптированных, в особенности, к определенным рабочим ситуациям, - или один используемый график впрыска может быть адаптирован к ситуации потребления, соответствующей определенным условиям. Другими словами, в процессе, например, спиливания или подачи может использоваться график впрыска, который может лучше обычного отвечать большой ступенчатой нагрузке или иному соответствующему набору параметров, характеризующих управления двигателем.
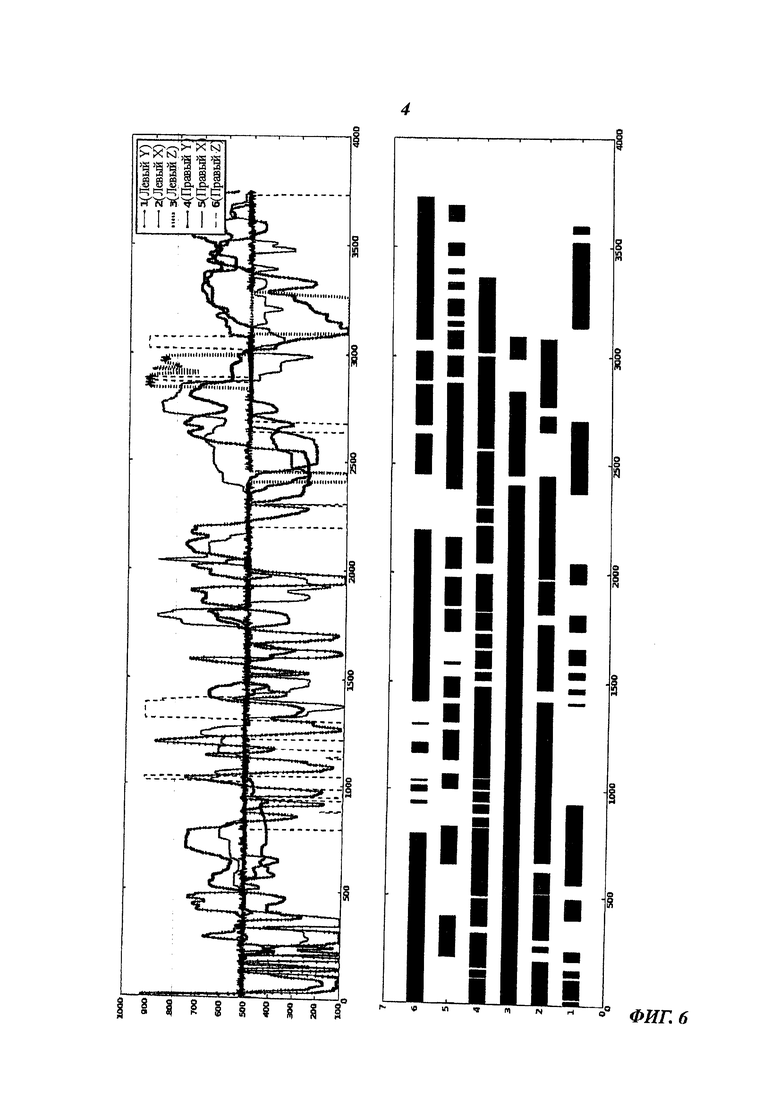
ФИГ.6 показывает возможность водителя использовать одновременно несколько функций машины, например, степеней разгрузки крана или погрузчика. В принципе, можно считать, что чем больше функций водитель одновременно использует при работе, тем больше будет производительность работы. Другими словами, менее опытный водитель способен одновременно использовать лишь одну или две из многочисленных функций, например, крана или погрузчика. В этом случае процесс работы и перемещения стрелы выглядят грубо и несколько неуклюже. Напротив, квалифицированный и опытный водитель способен эффективно использовать кран или стрелы, осуществляя одновременно несколько перемещений даже при большой скорости. Да и процесс работы выглядит плавным и стабильным, а часто является к тому же и энергосберегающим.
Верхняя часть ФИГ.6 показывает данные измерений по сигналам от различных контроллеров в зависимости от времени. В нижней части ФИГ. определяется, какой контроллер в какой момент времени используется. Как можно видеть из примера этой ФИГ., в данном случае водитель использует максимум пять функций одновременно.
Информация ФИГ.6 может быть автоматически использована в машине для определения уровня опытности водителя и, тем самым, для адаптации операций машины таким образом, чтобы они были оптимальны для данного уровня опытности. Если, к примеру, установлено, что водитель использует одновременно лишь один или два контроллера, может быть сделан вывод об относительной неопытности данного водителя. В этом случае можно добавочно ввести в контроллеры некоторую задержку или линейные нарастания сигналов, внося тем самым определенную плавность и гибкость в использование машины, даже когда она в руках такого неопытного водителя. Если же установлено, что водитель опытный, задержки управляющих команд можно, при необходимости, даже полностью убрать; это часто открывает возможности достижения максимальных скоростей перемещений и высокой производительности, но, с другой стороны, устанавливает высокие требования к водителю машины.
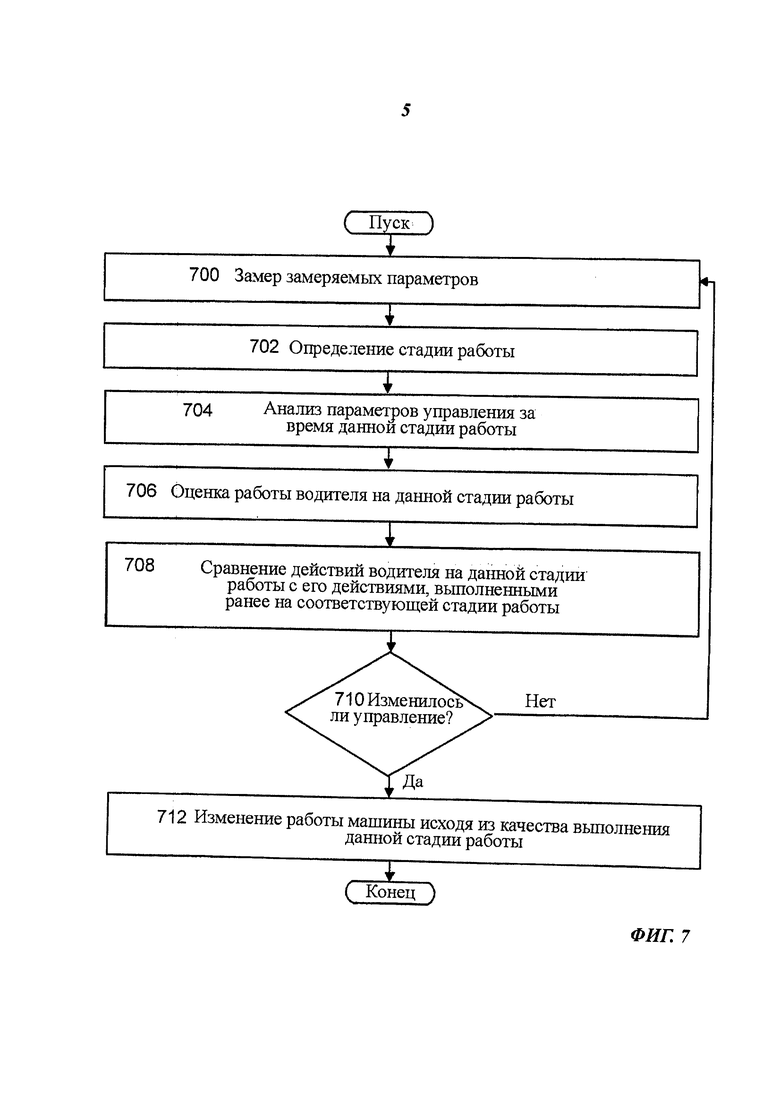
ФИГ.7 представляет еще один вариант осуществления способа. На шаге 700 этого способа замеряются значения параметров. На шаге 702 замеренные параметры анализируются, и, например, на основе таких функций машины и стрелы, как поворот, подъем, выдвижение и пиление, блок управления может сделать вывод, что рассматриваемая функция это функция пиления. Функция пиления может быть определена, например, как период времени от конца подачи ствола дерева до конечного момента пиления.
В одном из вариантов осуществления анализируются данные, описывающие операцию, и/или состояние, и/или среду, окружающую лесотехническую машину или ее водителя, и на основе этих данных идентифицируется текущая стадия работы или выполняемая в данный момент рабочая операция. После идентификации стадии работы или операции эти данные могут быть использованы в момент, когда водителю должна представляться информация, обратная связь, руководящие или иные данные, относящиеся к этой конкретной выполняемой стадии работы или операции. Идентификация стадии работы может быть выполнена, например, путем сравнения замеренных значений со стандартными значениями, описывающими данную стадию.
На шаге 704 собираются для анализа значения управляющих параметров за время данной стадии работы. Эти значения управляющих параметров могут быть считаны из запоминающего устройства, в котором они собирались в процессе данной стадии работы.
На шаге 706 на основе данных, собранных в процессе данной стадии работы, оценивается работа водителя. В одном из вариантов осуществления работа водителя оценивается с помощью хронометров. К примеру, может быть подсчитано время, затраченное на всю стадию работы, или эта стадия работы может быть разделена на несколько подэтапов, таких, например, как поворот стрелы или пиление, и оценено время, затраченное на выполнение этих подэтапов.
На шаге 706 работа водителя может также быть оценена относительно конкретной модели работы, хранящейся в системе управления. Эта модель работы может устанавливать, например, определенные лимиты времени, в которые оптимально выполняется каждый подэтап функциональной стадии пиления. Модель работы может также определять, например, как высоко поднимается сваленное дерево и используется или нет в данной ситуации функция выдвижения системы стрелы.
На шаге 708 работа водителя сравнивается с его работой, выполненной ранее на соответствующей стадии работы. Это сравнение может быть проведено либо сопоставлением с рабочими стадиями, связанными с текущей рабочей сменой водителя, либо с историей работы на протяжении более длительного периода времени. Аналогично, работа водителя может также сравниваться с работой других водителей или, в особенности, с известными моделями работ, характеризующими высокую опытность и квалификацию.
На шаге 710 определяется, отличается ли как-то работа водителя от обычной или желаемой работы водителя. Если да, процесс переходит к шагу 702, на котором работа машины изменяется, чтобы соответствовать текущей работе данного водителя. Если на шаге 710 определяется, что работа водителя, хотя и удовлетворяет определенным минимальным требованиям, однако медленнее нормальной, операции управления машины замедляются, чтобы соответствовать уровню работы водителя.
В еще одном варианте осуществления потребление горючего машиной оценивается по скорости вращения и крутящему моменту двигателя. К примеру, может быть построен график в системе координат, где по оси X - скорости вращения, а по оси Y - крутящий момент. В этой системе координат потребление горючего может быть показано в цвете, зависящем от уровня потребления.
Этот график может показать водителю, например историческое и текущее потребление. Водитель может, таким образом, видеть на графике, в какой пропорции текущее потребление при текущих значениях скорости вращения и крутящего момента соотносится с историческими данными. Если, например, водитель видит, что текущее потребление выше того, которое было раньше при соответствующих значениях функциональных параметров двигателя, водитель может попытаться откорректировать свои действия, чтобы снизить потребление. Альтернативно, лесотехническая машина может установить причину завышенного потребления и указать ее пользователю. Далее, альтернативно, машина может установить причину и, по меньшей мере, в некоторой степени применить принудительное управление, игнорируя управляющие команды водителя.
В одном из вариантов осуществления делается вывод о типе лесосеки, например, по управляющим данным водителя и/или данным замеров в двигателе и валочной головке. К примеру, может быть сделан вывод о производстве на рассматриваемой лесосеке сплошной рубки или прореживания. Исходя из типа лесосеки, можно оптимизировать рабочие параметры машины и/или параметры, влияющие на управление водителя. К примеру, на лесосеке прореживания по движениям джойстика водителя можно замерить густоту лесосеки. Полученные данные позволяют отрегулировать скорость подачи валочной головки так, чтобы ее, например, можно было понизить при прореживании густой лесосеки во избежание ненужного повреждения леса на корню; такая функция значительно облегчает работу водителя.
В еще одном варианте осуществления замеряется использование различных функций погрузчика или крана. Можно исследовать и сравнить друг с другом времена аналогичного использования сочленений, а полученные данные употребить для развития навыков работы водителя. К примеру, в плане энергосбережения может быть оправдано приоритетное использование определенной функции даже в том случае, когда одна и та же работа может быть выполнена двумя или несколькими различными способами. Например, в типовом случае так называемого колесного крана может быть предпочтительно попытаться выполнить перемещение конца стрелы от машины и к машине, используя так называемый цилиндр перемещения, а не цилиндр выдвижения. С другой стороны, в кранах с так называемой скользящей стрелой первым выбором при осуществлении вышеупомянутого перемещения конца стрелы от машины и к машине является использование выдвижения.
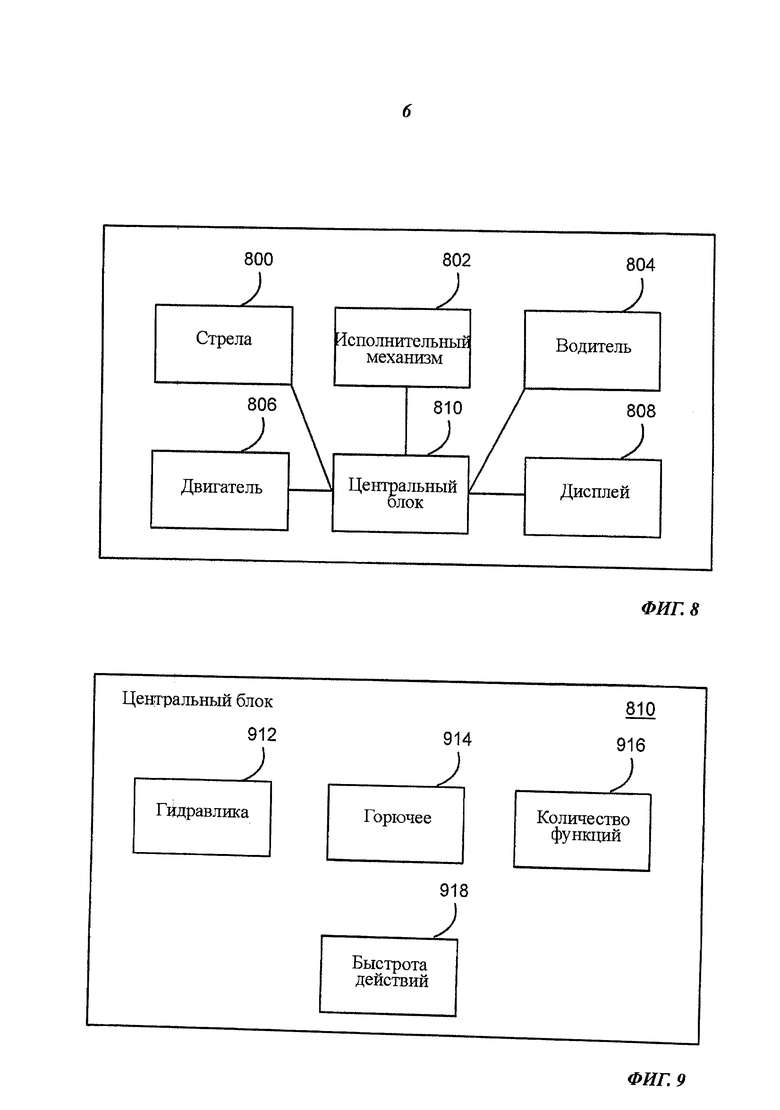
Хотя приведенные выше варианты осуществления были представлены на разных ФИГ., ясно, что они могут также использоваться в комбинациях. К примеру, замер PQ, характеризующий использование гидравлики, может применяться вместе с датчиком потребления горючего. И датчики потребления горючего также могут использоваться вместе, в сочетаниях друг с другом, - или замер потребления горючего может сочетаться, например, с измерением для оценки, согласно ФИГ.6, опыта водителя. На ФИГ.8 показан вариант осуществления устройства управления лесотехнической машины. Центральной частью устройства управления является центральный блок 810, координирующий работу лесотехнической машины, а также принимающий и передающий информацию другим подсистемам 800-808 системы управления.
Как подсистемы могут быть определены: система стрелы 800, система исполнительного механизма 802, система водителя 804, система двигателя 806 и дисплей 808. Различные подсистемы могут быть соединены с центральным блоком 810 и, при необходимости, друг с другом, например, через CAN-шину передачи данных. Функциональные возможности согласно изобретению могут быть реализованы в устройстве управления с помощью программного обеспечения и/или аппаратной части компьютера общего назначения. Эти функциональные возможности могут быть реализованы в подсистемах с использованием программного обеспечения и/или различных измерительных приборов.
Система стрелы 800 ответственна за управление стрелой и сбор данных, относящихся к работе стрелы. Соответственно, система исполнительного механизма 802 отвечает за выполнение задач, связанных с исполнительным механизмом, например, лесозаготовительной машины и/или захвата. Система водителя 804 принимает управляющие команды водителя. К ним могут относиться управляющие команды, отданные водителем с использованием педалей, джойстика, клавиатуры и т.п. Система двигателя 806 управляет источником питания машины, чаще всего - дизельным двигателем, на основе управляющих команд водителя, а также получает измерительную информацию от двигателя. Эта измерительная информация может, например, включать информацию о потреблении горючего. Дисплей 808 дает возможность представить водителю информацию, полученную от различных частей машины, и/или информацию, прошедшую дальнейшую обработку в центральном блоке 810.
На ФИГ.9 показаны в различных вариантах осуществления подсистемы центрального блока 810, представленного на ФИГ.8.
Центральный блок 810 может включать подсистему гидравлики 912. Подсистема гидравлики 912 имеет на входе, например, текущее давление гидравлической системы из точки, которая выбрана в качестве подходящей, и величину объемного расхода гидравлической жидкости в желаемой точке. На этой базе можно построить диаграмму, на которой стороны прямоугольника образованы давлением и объемным расходом. Далее, подсистема 912 может выбирать цвет прямоугольника, исходя из величины его площади. Если его площадь не превосходит первую пороговую величину, выбирается зеленый цвет. Если величина площади оказывается в промежутке между первой и второй пороговыми величинами, выбирается оранжевый цвет, а если площадь превосходит вторую пороговую величину, выбирается красный цвет. Сформированный прямоугольник может быть представлен водителю машины на дисплее 808. В другом варианте осуществления подсистема, после обнаружения высокого уровня нагрузки гидравлики и после установления причины этого, может воздействовать на управление устройством. Если, например, обнаружено, что захват машины гидравлически сжат без необходимости, нагружая тем самым гидравлическую систему, подсистема 912 может выдать управляющий сигнал на систему исполнительного механизма 802 для разгрузки гидравлики сжатия захвата.
Центральный блок 810 может также включать подсистему горючего 914. Эта подсистема может принимать данные по текущему потреблению горючего и формировать по ним, например, столбчатую диаграмму для показа пользователю. Помимо визуализации, представление информации может включать, например, предупредительный голосовой сигнал, если потребление горючего слишком велико. Подсистема 914 может также определять причину такого большого потребления горючего, например, заключающуюся в ненужно высокой нагрузке гидравлики. При необходимости может быть выдан управляющий сигнал, передаваемый на одну из систем управления 800, 802, 806 для расчета потребления горючего без управляющих команд водителя.
Подсистема 916 может отслеживать управляющие сигналы, полученные от пользователя, и рассчитывать количество одновременных управляющих сигналов в функции от времени. Эта характеристика может быть использована в управлении таким образом, что если количество одновременных управляющих сигналов на некоторой определимой стадии работы не превышает заранее заданного порогового значения, водитель может считаться неопытным и в этом случае задержка управляющих команд может быть отрегулирована, чтобы они соответствовали профессиональному уровню водителя.
Подсистема 918 быстроты действий водителя может определять характеристики специфичных для данной стадии работы действий водителя. К примеру, на идентифицированной стадии работы можно определять время, затраченное на поворот стрелы, которое может быть сопоставлено с прежними характеристиками действий водителя при выполнении той же операции. С другой стороны, ситуации, в которых может быть определено чистое время реакции и увеличение этого времени, например, в ходе рабочей смены водителя, могут служить косвенными показателями быстроты действий водителя. Примером здесь может служить время, протекающее между голосовым сигналом, подаваемым измерительным прибором лесозаготовительной машины для обозначения остановки подачи в цикле отрезки, до момента, когда водитель среагирует на эту информацию и нажмет кнопку управления отрезной пилой. Если время на эту операцию оказалось больше обычного, это может быть оценено как замедление быстроты действий водителя. В этом случае может быть выдан управляющий сигнал для передачи на подсистему 804 водителя, чтобы, например, увеличить задержки команд управления погрузчика или крана.
Ниже в форме кратких описаний приведены другие варианты осуществления настоящего изобретения.
Данные способ и устройство относятся к лесотехническим машинам, например, к таким, как лесозаготовительные машины или форвардеры. Способ включает измерение параметра, описывающего операцию, и/или состояние, и/или окружающую среду лесотехнической машины. Параметры могут замеряться на исполнительных механизмах, например, на стреле и валочной головке, или в двигателе, или в окружающей машину среде, или по операциям управления, выполняемым водителем, и результаты замеров могут собираться, например, в блоке управления. Значения параметров могут также собираться в самих исполнительных механизмах.
Способ включает обработку собранных результатов измерений и позволяет генерировать производные величины, диаграммы или предупреждения, представляемые пользователю, или генерировать управляющие команды игнорировать команды управления водителя или адаптировать устройство к действиям водителя.
Способ позволяет воздействовать на один или несколько параметров, управляющих работой машины, и/или давать водителю обратную связь, инструкцию или подсказку с целью изменения его или ее управляющих действий. Управляющий параметр может представлять собой, например, информацию по управлению, предоставляемую водителю, или управляющий сигнал, посылаемый двигателю или исполнительному механизму.
В разных ситуациях система управления лесотехнической машины может, например, через пользовательский интерфейс представить или передать информацию водителю, например, в одной или нескольких формах, именно: обратной связи, инструкции или подсказки.
В типовом случае обратная связь может быть, например, сформированной системой управления оценкой того, успешно ли или насколько успешно выполнена водителем данная фаза работы или эксплуатации лесотехнической машины. Формирование обратной связи чаще всего включает, по меньшей мере, стадию сравнения выполненной фазы работы или эксплуатации, например, с заранее заданной моделью ее выполнения или стандартами, описывающими, например, желательное, успешное ее выполнение.
В типовом случае инструкция может быть информацией или представлением, касающимся того, как водитель, используя машину, может, например, достичь более высокой производительности или сохранить тот же уровень производительности при меньшем потреблении горючего, и эта информация передается водителю системой управления лесотехнической машины. Инструкция может также представлять собой общую информацию, касающуюся штатной работы машины, например, ее гидравлической системы; учет такой штатной работы может играть важную роль в обеспечении максимально успешного выполнения работы.
Подсказка может означать уточненную инструкцию или часть специально выданной водителю системой управления лесотехнической машины информации, на основе которой водителю предлагается некая операция, осуществление которой может, например, положительно повлиять на выполнение очередной фазы работы или эксплуатации. Подсказка, таким образом, это выработанное для выполнения конкретной задачи предложение, которое водителю легко принять или не принять даже в ходе лихорадочной и требующей концентрации стадии работы, так что процесс работы водителя остается существенно непрерывным.
В одном из вариантов осуществления представляющие интерес параметры замеряются в течение короткого или длительного периода времени и/или усредняются, и/или фильтруются. Краткосрочные измерения могут проводиться с целью определения, например, текущего потребления горючего или текущей мощности гидравлики. Долгосрочные измерения могут проводиться с целью определения управляющих данных в течение некоторой стадии работы. Возможно проведение замеров в течение всей рабочей смены водителя, и стадии работы внутри рабочей смены могут быть сопоставлены друг с другом. Усреднение означает, что управляющие действия водителя могут быть усреднены, например, за время рабочей смены или, например, за неделю, и выведена, например, усредненная модель действий водителя на данной стадии работы. Фильтрация означает, что из данных измерений могут быть отфильтрованы любые элементы, внешние по отношению к текущим управляющим действиям, чтобы можно было сравнить управляющие действия друг с другом. К примеру, могут быть отфильтрованы всякие влияния уклона местности на потребление энергии, если поставлена цель определить потребление энергии гидравликой в операции погрузки.
В одном из вариантов осуществления в число измеряемых параметров входят управляющие параметры, характеризующие управляющие действия, выполненные водителем. Такими управляющими действиями могут быть, например, операции ручного управления, выполненные с использованием джойстика или клавиатуры, или операции голосового управления, или операции управления, выполненные с использованием педалей.
В одном из вариантов осуществления замеряется качество операций управления.
Качество операций управления может быть оценено, например, путем сравнения управляющих действий (текущих или характерных для данной стадии работы) с заранее определенной моделью действий. Заранее определенная модель действий может предпочтительно храниться в запоминающем устройстве/базе данных системы управления лесотехнической машины.
Качество операций управления может быть также оценено посредством оценки гибкости или плавности управляющих операций водителя. Возможно также отслеживать операции управления и идентифицировать резкое изменение направления, произведенное водителем, например, при управлении каким-либо перемещением стрелы, в частности, поворотом. Может быть также введен специальный критерий качества, например, такой: если в течение пяти минут количество управляющих действий, которые могут быть сочтены ошибочными, достигает трех, может быть констатировано снижение качества работы водителя.
Если установлено, что качество управления изменилось, например, снизилось, управление лесотехнической машины подвергается воздействию, адаптирующему одну или несколько управляющих операций машины для соответствия качеству управляющих операций, выполняемых водителем. Это может, например, означать, что увеличивается задержка управляющих команд.
В одном из вариантов осуществления в случае, когда качество управления не отвечает заранее заданному критерию, управление лесотехнической машины подвергается воздействию, при котором в отношении одной или нескольких управляющих операций осуществляется принудительное управление, противоречащее управляющим действиям водителя. Так, например, возможно, что машина, идентифицировав нежелательное действие, информирует об этом пользователя, и пользователь может принять принудительное управление машиной или проигнорировать информацию. Альтернативно, машина не информирует водителя о своих намерениях принудительного управления машиной.
В одном из вариантов осуществления оценка быстроты действий водителя производится сравнением замеренных значений одного или нескольких параметров с характеристиками управляющих операций, выполненных водителем ранее, и управление лесотехнической машины подвергается воздействию, адаптирующему одну или несколько операций управления машины для соответствия быстроте действий водителя. Быстрота действий водителя может анализироваться в течение длительного периода времени, к примеру, в продолжение рабочей смены. Могут быть идентифицированы отдельные стадии работы в ходе рабочей смены, и если действия водителя на аналогичных стадиях работы начинают отличаться друг от друга, может быть констатировано изменение быстроты действий водителя.
В одном из вариантов осуществления оценка быстроты действий водителя производится путем физиологических замеров, снимаемых непосредственно с водителя. К примеру, частота пульса, колебания частоты пульса, электрическая проводимость кожи или другие физиологические параметры могут при необходимости замеряться, например, специально предусмотренными для этой цели датчиками, к примеру, связанными с пользовательским интерфейсом, в частности, с подлокотниками и джойстиками лесотехнической машины.
В одном из вариантов осуществления замеренные значения одного или нескольких параметров и/или выведенные из них производные величины представляются водителю визуально и/или голосовой информацией или иным образом. Визуальное представление может выполняться на дисплее водительского компьютера, например, в виде столбчатой или секторной диаграммы. Это представление может иллюстрировать текущие действия водителя, соотнесенные, например, с его же собственными действиями в прошлом, с историческими данными, собранными по нескольким водителям, или с модельными действиями. Предпочтительность того или иного действия может быть проиллюстрирована цветом, например: если операция оптимальна, диаграмма окрашивается в зеленый или оранжевый цвет, а если нежелательна - в красный.
В одном из вариантов осуществления стадия работы, которая должна быть выполнена лесотехнической машиной, определяется на основе измерений одного или нескольких параметров, и оценивается работа водителя конкретно на каждой стадии.
В одном из вариантов осуществления один или несколько замеряемых параметров включают один или несколько параметров гидравлики, описывающих использование гидравлики лесотехнической машины. Параметрами, описывающими использование гидравлики, могут быть гидравлическое давление и/или объемный расход. По этим параметрам перемножением замеренных значений может быть получена производная величина, описывающая гидравлическую мощность. Визуально она может быть представлена на формируемой диаграмме площадью прямоугольника.
Если использование гидравлики высокое, это может быть проиллюстрировано, например, цветом. Водителю может быть также показано, из-за чего, т.е. в результате какого управляющего действия, потребовалась высокая мощность. Система управления может предложить пользователю корректирующие действия или применить принудительное управление, игнорируя управляющие команды водителя.
В одном из вариантов осуществления один или несколько замеряемых параметров включают текущее потребление горючего лесотехнической машины. В этом варианте можно определить потребление горючего лесотехнической машины на данной стадии работы и представить это потребление горючего водителю, соотнеся его с потреблением горючего на соответствующей стадии работы, выполненной водителем ранее, и/или с модельным выполнением этой стадии работы.
В одном из вариантов осуществления отслеживается величина определенной нагрузки лесотехнической машины, например, исходя из массы, замеренной весами, или из информации о нагрузке, введенной водителем, и на основе этих данных осуществляется воздействие на один или несколько управляющих параметров лесотехнической машины. Это может быть использовано таким образом, что при обнаружении машиной высокой нагрузки на погрузчик или в грузовом пространстве машины, скорость вращения двигателя и крутящий момент машины могут быть увеличены по сравнению с обычными значениями. При малой нагрузке скорость вращения может быть снижена для экономии горючего.
В одном из вариантов осуществления замеряются параметры окружающей лесотехническую машину среды. К примеру, в окружающей среде может быть замерен уклон местности, т.е. ее подъем или спуск, и могут быть изменены параметры тяговой передачи, чтобы они соответствовали требованиям работы на подъеме или спуске. Данные GPS, соединенные с информацией о профиле местности (трехмерные данные GPS), дают возможность отрегулировать параметры машины, например, мощность, непосредственной регулировкой по сигналу GPS. Далее, наблюдение за средой может проводиться таким образом, что если за некоторый отрезок времени, например, за 15 минут, краном или валочной головкой было собрано большое количество маленьких деревьев, может быть сделано заключение, что осуществляется операция прореживания. В этом случае работа машины может быть приспособлена к этим обстоятельствам, например, посредством снижения скорости подачи, уменьшающего повреждения и порчу леса, обычно вызываемые слишком высокой скоростью подачи при прореживании густого леса на корню.
В одном из вариантов осуществления водителю представляется информация только при выполнении некоторой стадии работы. К примеру, информация о мощности, требуемой для выполнения функций валочной головки, представляется только при выполнении подачи валочной головки или пиления ствола дерева.
В одном из вариантов осуществления информация представляется водителю только в том случае, когда измеряемая величина превышает определенное пороговое значение. К примеру, если потребление горючего или параметры использования гидравлики превысят пороговое значение, это будет представлено водителю. В одном из вариантов осуществления система предоставляет водителю возможность выбрать получение более подробного представления соответствующей ситуации. К примеру, водителю может быть предложено представление информации о том, какой части текущего ресурса гидравлики требует каждая управляющая операция. Операция, вызывающая нецелесообразно высокое потребление, может быть выделена визуально.
В одном из вариантов осуществления величина мощности, отбираемой гидравлической системой лесотехнической машины, оценивается исходя из управляющих действий водителя. Это означает, что измерительная информация приходит из системы управления так же, как управляющие сигналы передаются исполнительному механизму. В другом варианте осуществления величина мощности, отбираемой гидравлической системой лесотехнической машины, оценивается исходя из управляющих действий водителя и результатов измерений, соответствующих этой конкретной цели.
В одном из вариантов осуществления идентифицируется необязательное управляющее действие водителя, скажем, безостановочное доведение до конца некоторого перемещения, вызывающего ненужное потребление мощности, например, сохранение в гидравлической системе высокого давления, не нужного для завершения операции. Водитель может быть проинформирован о нежелательности метода выполнения операции - или же система может оптимизировать работу машины, игнорируя водителя.
Функциональные возможности, описанные в различных вариантах осуществления, могут быть реализованы с помощью компьютерного программного продукта, представляющего собой компьютерную программу, содержащую команды, выполняемые в процессе работы компьютера согласно вышеупомянутым вариантам осуществления настоящего способа. Компьютерный программный продукт может быть создан на машиночитаемом носителе. Этим носителем может быть любой известный носитель для запоминающих устройств, машиночитаемый носитель отдельных модулей памяти, машиночитаемый дистрибутив пакета программ или машиночитаемый упакованный пакет программ.
Специалисту понятно, что по мере совершенствования технологии основная идея настоящего изобретения может быть реализована многими различными путями. Таким образом, настоящее изобретение и варианты его осуществления не ограничиваются вышеописанными примерами, но могут варьироваться в пределах объема прилагаемой формулы изобретения.
Группа изобретений относится к технологиям управления лесотехнической машиной. Техническим результатом является обеспечение возможности определения изменения в быстроте действий водителя. Предложен способ управления работой лесотехнической машины. Способ содержит этап, на котором собирают в центральном блоке управления лесотехнической машиной или в ином блоке управления лесотехнической машиной данные, описывающие операцию, и/или состояние, и/или среду, окружающую лесотехническую машину, причем указанные данные включают один или более параметров. Далее, согласно способу, обрабатывают собранные данные в центральном блоке управления лесотехнической машиной или в ином блоке управления лесотехнической машиной для оценки быстроты действий водителя, а также оценивают, на основе собранных данных, качество управляющих операций, выполненных водителем лесотехнической машины, и воздействуют на основании обработанных данных на параметры, управляющие работой лесотехнической машины. 2 н. и 12 з.п. ф-лы, 9 ил.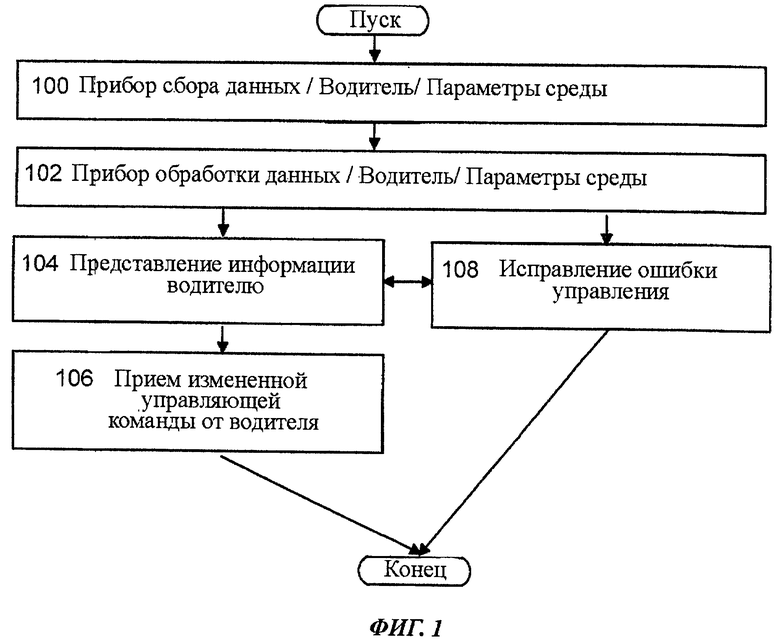
1. Способ управления работой лесотехнической машины, отличающийся тем, что включает следующие шаги:
собирают в центральном блоке управления лесотехнической машиной или в ином блоке управления лесотехнической машиной данные, описывающие операцию, и/или состояние, и/или среду, окружающую лесотехническую машину, причем указанные данные включают один или более параметров;
обрабатывают собранные данные в центральном блоке управления лесотехнической машиной или в ином блоке управления лесотехнической машиной для оценки быстроты действий водителя, а также оценивают, на основе собранных данных, качество управляющих операций, выполненных водителем лесотехнической машины;
воздействуют, на основе обработанных данных, на один или более параметров, управляющих работой лесотехнической машины, при этом, если упомянутое оцененное качество управляющих операций не отвечает заранее заданному критерию, осуществляют в отношении одной или более управляющих операций принудительное управление лесотехнической машиной, противоречащее управляющим операциям, выполненным водителем.
2. Способ по п. 1, отличающийся тем, что способ дополнительно содержит следующие шаги:
предоставляют водителю обратную связь, или инструкцию, или подсказку для изменения управляющих действий водителя.
3. Способ по п. 1 или 2, отличающийся тем, что дополнительно предлагают водителю автоматическую регулировку управляющих операций для повышения качества управления и осуществляют автоматическую регулировку управляющих операций водителя, если водитель принимает автоматическую регулировку управляющих операций.
4. Способ п. 1 или 2, отличающийся тем, что упомянутую оценку быстроты действий водителя осуществляют путем сравнения некоторых значений одного или более параметров с прежними значениями этих параметров.
5. Способ по п. 1 или 2, отличающийся тем, что дополнительно идентифицируют текущую стадию работы или выполняемую в данный момент рабочую операцию на основе собранных данных, описывающих операцию, и/или состояние, и/или среду, окружающую лесотехническую машину, и представляют или передают водителю информацию, относящуюся к этой стадии работы или операции.
6. Способ по п. 1 или 2, отличающийся тем, что дополнительно представляют водителю значения одного или более параметров и/или выведенных из них производных величин.
7. Способ по п. 6, отличающийся тем, что дополнительно представляют водителю оценку оптимальности работы лесотехнической машины и/или управляющих действий, выполненных водителем.
8. Устройство управления работой лесотехнической машины, отличающееся тем, что содержит:
средства сбора замеренных данных, описывающих операцию, и/или состояние, и/или среду, окружающую лесотехническую машину, причем указанные данные включают один или более параметров;
средства обработки данных, собранных упомянутым средством сбора, для оценки быстроты действий водителя;
средства оценки на основе данных, собранных упомянутым средством сбора, качества управляющих операций, выполненных водителем лесотехнической машины;
средства воздействия на основе данных, обработанных средством обработки данных, на один или более управляющих параметров, управляющих работой лесотехнической машины, причем указанные средства обработки и указанные средства воздействия содержат по меньшей мере центральный блок управления лесотехнической машиной или иной блок управления лесотехнической машиной, при этом, если качество управляющих операций, полученное упомянутым средством оценки не отвечает заранее заданному критерию, упомянутые средства воздействия на работу лесотехнической машины в отношении одной или более управляющих операций осуществляют принудительное управление лесотехнической машиной, противоречащее управляющим операциям, выполненным водителем.
9. Устройство по п. 8, отличающееся тем, что дополнительно содержит средства для предоставления водителю обратной связи, или инструкции, или подсказки для изменения управляющих действий водителя.
10. Устройство по п. 8 или 9, отличающееся тем, что дополнительно содержит средства предложения водителю автоматической регулировки управляющих операций для повышения качества управления; средства автоматической регулировки управляющих операций водителя, если водитель принимает автоматическую регулировку управления.
11. Устройство по п. 10, отличающееся тем, что упомянутые средства оценки быстроты действий водителя выполнены с возможностью сравнения некоторых значений одного или более параметров с прежними значениями этих параметров.
12. Устройство по п. 10 или 11, отличающееся тем, что дополнительно содержит средства идентификации текущей стадии работы или выполняемой в данный момент рабочей операции на основе собранных данных, описывающих операцию, и/или состояние, и/или среду, окружающую лесотехническую машину; и средства представления или передачи водителю информации, относящейся к этой стадии работы или операции.
13. Устройство по п. 8 или 9, отличающееся тем, что дополнительно содержит средства представления водителю значений одного или более параметров и/или выведенных из них производных величин; и средства представления водителю оценки оптимальности работы лесотехнической машины и/или управляющих действий, выполненных водителем.
14. Лесотехническая машина, отличающаяся тем, что содержит устройство управления работой лесотехнической машины по одному из пп. 8-13.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ОПТИМИЗАЦИИ РЕГУЛИРУЕМЫХ ПАРАМЕТРОВ МАШИНЫ | 2004 |
|
RU2350999C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И СТИМУЛЯЦИИ РАБОТОСПОСОБНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 0 |
|
SU280757A1 |

