Изобретение относится к области космической техники и может использоваться для определения тяги стационарного плазменного двигателя (СПД) коррекции, составления планов маневров на орбите и оценки остатков рабочего тела (РТ) системы коррекции движения центра масс (ЦМ) космического аппарата (КА).
Реальной технической проблемой эксплуатации КА при стремлении минимизировать затраты наземного комплекса управления в части баллистического обеспечения (БО) является отсутствие высокоточных акселерометров для определения достоверных ускорений КА от работы двигателей коррекции (ДК) малой тяги и устройств для определения тяги ДК. Потому тяги ДК и управляющие ускорения (проекции ускорения от работы конкретного ДК на оси связанной с КА системы координат) находят опосредованно - через изменения параметров движения ЦМ КА. Погрешность определения ускорений в этом случае сильно зависит от длительности работы ДК и ошибок определения параметров движения по данным траекторных измерений. Если коррекции движения центра масс КА проводятся часто (ежесуточно, даже раз в неделю), обозначенная техническая проблема становится настоятельной.
Известно множество схем устройств акселерометров. В качестве основных направлений разработок, для сравнения с предлагаемым устройством, можно привести следующие.
Известен интегральный микромеханический автоэмиссионный акселерометр (RU 2390031 C1, МПК G01P15/14), содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорную область, жестко закрепленную относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода, расположенных с зазором над вспомогательными неподвижными электродами, образуя с ними четыре плоских конденсатора, согласно изобретению, дополнительно содержит крестообразный подвес, центральная часть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы, при этом вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом. При возникновении ускорения подложки в направлении одной из осей, опорная рамка вместе с инерционной массой и закрепленными на ней подвижными электродами под действием сил инерции перемещается вдоль этой оси, что приводит к деформации крестообразного подвеса. Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, получают приращения вследствие одновременного изменения ширины всех зазоров, характеризуя величину ускорения. При работе в компенсационном режиме сила, воздействующая на опорную рамку с закрепленной на ней инерционной массой, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных неподвижных электродов и вспомогательных подвижных электродов, что позволяет поддерживать постоянными туннельные токи, протекающие между подвижными и неподвижными электродами. Выходным сигналом при этом является величина напряжения, прикладываемого между вспомогательными электродами.
Известен трехосевой акселерометр с переменной осевой чувствительностью (RU 2390030 C2, МПК G01P15/097, G01P15/18) содержащий инерциальную массу и опорную систему для инерциальной массы, причем опорная система содержит основание и множество опорных элементов, проходящих между основанием и инерциальной массой для подвешивания инерциальной массы в ортогональных направлениях, обеспечивая статически неопределенную конструкцию, датчики напряжений, предназначенные для измерения обусловленного напряжением ускорения в опорных элементах посредством определения параметра ускорения массы. Вместо тензодатчиков возможно использование других датчиков, например пучковых резонаторных систем, в которых частоты колебаний изменяются при изменении нагрузки пропорционально ускорению, формируя соответствующий выходной сигнал.
Известен угловой акселерометр (RU 2399915 C1, МПК G01P15/08), содержащий инерционную массу на упругих подвесах, датчик положения, основание и крышку, отличающийся тем, что в устройство дополнительно введены два постоянных магнита, компаратор, ключ и источник постоянного тока, инерционная масса выполнена из монокристаллического кремния в виде диска с оптическими щелями и размещена в зазоре между постоянными магнитами с возможностью углового перемещения, магниты закреплены на основании и крышке, датчик положения выполнен из двух излучателей и двух фотоприемников, оптические оси которых проходят через оптические щели и закреплены в отверстиях на основании и крышке, на поверхности инерционной массы радиально напылены токопроводящие дорожки, начала и концы которых соединены между собой напыленными токопроводящими кольцами и каждое из колец токопроводами через упругие подвесы соединены с выходами ключа, к первому входу которого подключен источник постоянного тока, а ко второму входу подключен выход компаратора, ко входу которого подключены выходы фотоприемников, а излучатели подключены к источнику постоянного тока. Данное техническое решение взято за прототип.
Известен
1. Высокоточный космический акселерометр (ВКА) (RU 2399915 C1, МПК G01P15/105), содержащий инерционную массу, корпус, электрическую схему переключателя и фиксации времени, отличающийся тем, что корпус представляет собой сферу, внутри которой расположена с зазором внутренняя сфера, подвес внутренней сферы связывает ее с внешней сферой и состоит из четырех подпружиненных штырей, равномерно разнесенных по поверхности внутренней сферы, закрепленных на ней, свободно проходящих сквозь люфтовые отверстия в корпусе; с внешней стороны корпуса установлены электромагниты в количестве, кратном двум, по числу осей установок двигателей коррекции движения ЦМ КА; в качестве инерционной массы используется магнитовосприимчивый шарик, находящийся во внутренней сфере; внешняя электрическая схема предусматривает включение-отключение выбираемых электромагнитов и фиксацию моментов отключения электромагнита и размыкания электроконтакта (начало движения шарика) и замыкания одного из электроконтактов при нажиме шарика в каком-либо месте на поверхность внутренней сферы в конце его движения.
2. ВКА по п.1, отличающийся тем, что отношение инерционной массы (массы шарика) к общей массе внутренней сферы и подпружиненных штырей равно 10:1.
Технический результат здесь достигается за счет того, что перед началом рабочего цикла осуществляется притягивание на старт инерционной массы из полости внутренней сферы выбранным и включенным электромагнитом и, зная расположение электромагнита в привязке к спутниковой системе координат и угол установки двигателя коррекции движения КА, следовательно, зная заранее расстояние, которое проходит шарик внутри сферы, и время прохождения этого расстояния, как разность (t2 - t1), будем иметь значение ускорения от работы данного двигателя коррекции.
Из уровня техники известны устройства, которые, являясь, по сути, устройствами для определения тяги (напора, давления), имеют самостоятельное название и занимают определенную нишу в технике. Это расходомеры, более того, механические расходомеры. Механические или по-другому тахометрические расходомеры необходимы для определения значений расхода массы или скорости потока газа или жидкости за определенный период времени. Принцип тахометрической расходометрии газа и жидкости основан на использовании механической турбины, вращающейся под действием потока. При вращении турбина приводит в действие магнитный прерыватель тока, по показаниям которого определяют частоту ее вращения. Частота импульсов фиксируется регистрирующим прибором. Выходной сигнал имеет линейную зависимость от скорости потока в установленном для прибора диапазоне.
В первом аналоге используют то, что «вследствие малости зазора, разделяющего области подвижных и неподвижных электродов, электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами, туннелируют из неподвижных электродов в соответствующие подвижные электроды и тем самым создают туннельные токи, которые являются выходными сигналами устройства».
Недостатком данного устройства является безусловно низкая чувствительность, которую не поднять никакими приемами в данном направлении техники, поскольку теория туннельного эффекта сложна, формула плотности тока, то же, что и силы, имеют специфический для каждого вещества коэффициент и степенную форму, в степени стоят напряженность внешнего электрического поля и величина в тех же единицах, включающая в себя достаточно много нелинейной специфики, относящейся к свойствам электрона. Отсюда следует, что функция изменения силы тока (что можно интерпретировать как ускорение от внешних сил) также не линейна - одни и те же условия опыта не гарантируют качества определения ускорения.
Во втором аналоге возможно применение в его устройстве широкого спектра различных чувствительных элементов, параметры которых изменяются пропорционально ускорению от нагрузки, таких, как тензорезисторы, кристаллические диэлектрики, резонаторные системы. Возможно, у него есть один плюс - массогабаритные характеристики (что не факт, поскольку измерительную систему зачастую приходится наращивать под выбранный диапазон внешних усилий), но и один большой минус - ни одна модификация данного технического решения не приближает точность определения ускорения к точности показаний единичного хорошего датчика, скажем, 1-2%, уже потому, что длинная цепочка датчиковой аппаратуры, преобразовательных цепей, часов от внешнего усилия до результата.
В отношении тензодатчиков. Они работают в области упругих деформаций, изменяя свое сопротивление пропорционально коэффициенту тензочувствительности k=2-200, при этом в области малых нагрузок (k - единицы), что имеет место при включениях двигателей коррекции в космосе, собственно эффект исчезает на фоне температурного изменения сопротивления даже при изменении температуры на несколько градусов. Такую теплоизоляцию в условиях космоса обеспечить проблематично.
В отношении пьезоэлектрических датчиков. Под действием давления возникают электрические сигналы (суммарная ЭДС пропорциональна давлению) за счет поляризации диэлектрика, пропорциональной некоторому коэффициенту (для кварца, например, 3⋅10-8), сильно зависящего от условий работы. В общем, эффект с одной стороны тонкий - небольшая величина поляризации, с другой грубоватый - большие внешние нагрузки. И главное - ввиду того, что при относительно постоянном давлении (ускорении), что требуется в космических условиях при определении ускорения движения ЦМ КА, эффект быстро исчезает, т.к. электрические заряды «стекают», пьезодатчики в принципе не применимы.
В отношении применения резонаторных систем. Данное техническое решение основано на том, что элемент-камертон, подверженный колебанию от генератора частоты, под действием растяжения/сжатия от воздействия инерционной массы изменяет частоту своих колебаний пропорционально ускорению. Пропорциональность возможна еще при колебательном движении инерционной массы, и маловероятна при поступательном движении, которое необходимо при определении ускорения от работы двигателя. В любом случае точность определения изменения результирующего колебания резонатора весьма низкая, либо технически сложная задача.
Третий аналог, в принципе, дает хорошие результаты и обладает приемлемыми массогабаритными характеристиками, однако устройство предназначено строго для определения угловых ускорений от внешних сил и должно находиться в центре инерции, отступление от которого вносит значительные погрешности определения углового ускорения. Это большой недостаток данного решения. И данное техническое решение по своей функциональности непригодно для вышеуказанной задачи определения поступательного ускорения.
Четвертый аналог относится к достаточно чувствительным устройствам, однако:
- как и все другие известные устройства-аналоги, он - прибор, определяющий ускорение движущегося КА под воздействием возмущающих факторов, в числе которых, кроме работы СПД, работа двигателей ориентации, неточность учета светового давления, негерметичность двигательных установок и другие. Такие приборы востребованы на КА глобальных навигационных системах связи, где положение КА надо знать в любой момент и с высокой точностью, в отличие от других КА, где следует соблюдать только требования к удержанию на заданных орбитальных позициях, обуславливающих структуру комической системы. Есть способы определения тяги по тем или иным сопутствующим параметрам, например, RU 2762586 С1. Однако устройства непосредственного определения тяги реактивного двигателя отсутствуют;
- в настоящее время, в связи с возрастающей загруженностью НКУ КА, требуется в регламент штатной работы КА вводить режим автономного от НКУ БО полета на срок не менее двух недель. Практика эксплуатации КА показывает, что 14-суточный цикл БО является желательным, но трудновыполнимым условием. Погрешность знания тяги всех СПД, участвующих в реализации текущего плана коррекций, - значимая, если не доминирующая ошибка на интервале плана. Хорошо зная тягу СПД при, как правило, удовлетворительных погрешностях определения и прогнозирования параметров движения ЦМ КА, можно не проводить ИТНП - измерения текущих навигационных параметров (контроль орбиты) в течение 14-ти и более суток.
- ВКА представляет собой шарообразное устройство диаметром не менее 25 см и общей массой не менее 4 кг. Предлагаемое устройство, как следует из сказанного ниже, имеет массогабаритные характеристики в разы меньшие.
Пятый аналог взят за прототип. Механические расходомеры просты и надежны в эксплуатации, дают удовлетворительные результаты ±(0,5 - 2,5)% от измеряемого значения. Но если механические расходомеры так хороши, почему же их не использовать в космосе, для определения управляющих ускорений от работы двигателей коррекции КА.
Опускаем рассмотрение чисто механических всякого рода пружинных систем со стрелками: они явно непригодны для такого деликатного дела, как определение ускорения при тяге двигателя коррекции движения ЦМ КА, схожей с дуновением ветра.
Технической проблемой изобретения является создание устройства определения тяги (УОТ) СПД, прибора, определяющего тягу с погрешностью 1 - 3%. Указанная техническая проблема решается за счет того, что УОТ тяги СПД, содержащее винтовую турбину в виде шнека или стержня с винтовой канавкой, вал турбины, датчик частоты оборотов, отличается от прототипа тем, что турбина, вал турбины, стойка, крышка стойки в активной зоне (АЗ) стационарного плазменного двигателя (СПД) изготовлены из тугоплавкого металла, температура плавления которого выше 1500°С, стойка представляет собой цилиндрическую трубу, фланцевым соединением крепящуюся к корпусу СПД в центральной части, с газозаборными прорезями, внутри которой установлена турбина, вал которой концами упирается в опорные конусы, один из которых установлен на внутренней стороне крышки стойки со стороны АЗ СПД, другой, полый и подпружиненный, установлен внутри центральной части стойки-стакана со стороны СПД, противоположной АЗ, соединенного фланцем с корпусом СПД, на окончании вала, со стороны, противоположной АЗ, имеется обжимное кольцо, снабженное двумя постоянными магнитами, при вращении турбины приводящими в функциональное действие холловский датчик частоты оборотов (ХДЧО).
Идея предлагаемого изобретения состоит в создании устройства, снимающего прямые показания с РТ-газа и переводящего эти показания в тягу СПД, по типу расходомеров, применяемых на земле.
Изобретение направлено на технический результат - определять тягу СПД прибором, часть которого непосредственно находится в исходящем от СПД потоке РТ-газа, то есть определять тягу газового потока при его непосредственном контакте с прибором.
Технический результат достигается за счет того, что при работе СПД РТ-газ, покидая двигатель, сквозь прорези в стойке проникает к турбине и наращивает скорость ее вращения до максимального значения. Приобретенная конечная скорость вращения турбины имеет линейную (пропорциональную) зависимость от удельной тяги СПД, а темп повышения частоты оборотов ХДЧО в начальный период работы СПД линейно зависит от фактической тяги.
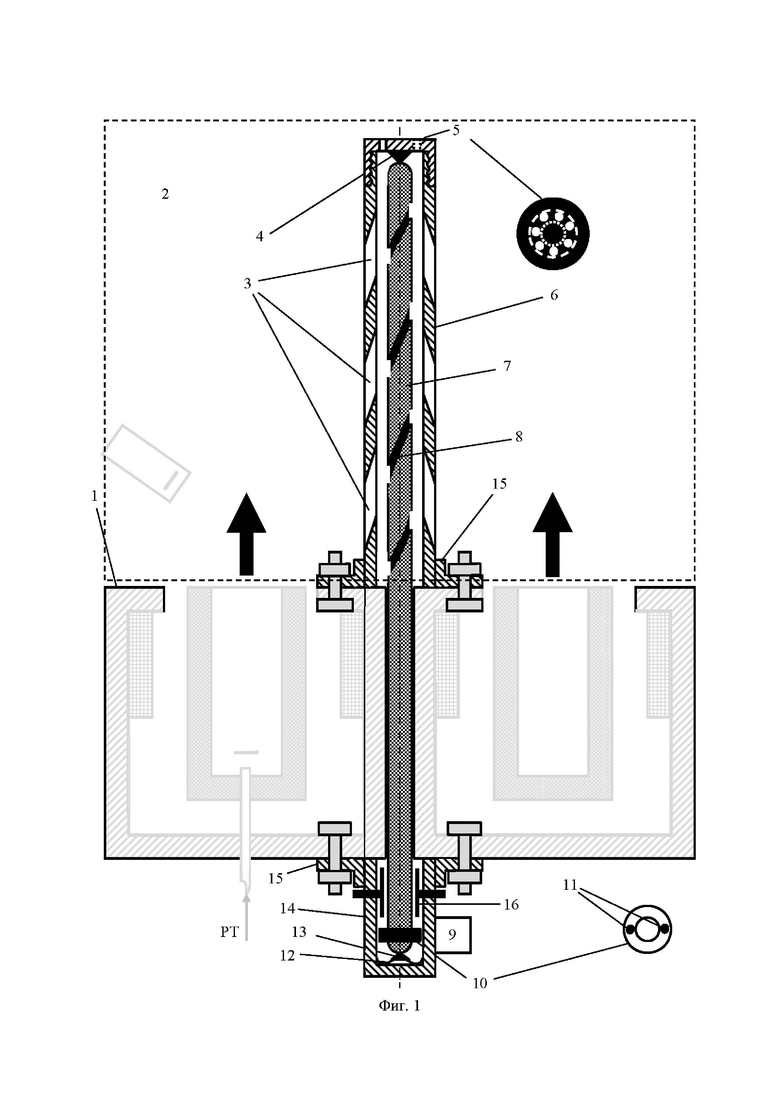
Сущность изобретения поясняется фиг. 1, где представлена кинематическая схема УОТ.
Введены следующие обозначения:
1 - корпус СПД;
2 - АЗ;
3 - газозаборные отверстия;
4 - опорный конус;
5 - опорная крышка;
6 - стойка;
7 - вал (стержень);
8 - турбина (спиральная канавка);
9 - ХДЧО;
10 - обжимное неферромагнитное кольцо;
11 - постоянные магниты;
12 - крестообразная пластинчатая пружина;
13 - подпружиненный опорный конус;
14 - неферромагнитная стойка-стакан;
15 - фланец;
16 - тормозные колодки.
На фиг. 1, как несущественное и занимающее много места, не показано тормозящее вал 7 устройство. Кроме тормозных колодок 16, находящихся в стакане 14, это устройство имеет блок управления и электрическое питание. На фиг. 1 двумя крупными стрелками показано направление истечения РТ-газа из ускорительного канала СПД.
Температура РТ-газа на выходе из СПД порядка 1000 К, потому стойку 6, стержень или вал 7, крышку 5 с опорным конусом 4 следует изготавливать из тугоплавкого металла, например, титана или вольфрама. На уровне 1000 К коэффициенты температурного линейного расширения титана и вольфрама 5⋅10-6 и 11⋅10-6 соответственно. УОТ лучше располагать в центральной части корпуса 1: это самая стабильная область АЗ 2, и здесь возможен идеально равномерный нагрев деталей УОТ. Это приводит при длине вала (стержня) порядка 300 мм к его удлинению на соответственно 2 мм и 4 мм. Стойка 6 за счет своей длины и широких отверстий 3 тоже увеличится в длине, не более чем на 1 - 2 мм, стало быть, надо исключить нежелательную деформацию УОТ от температурного расширения частей УОТ различной начальной длины, непосредственно связанных между собой. Будем для гарантии считать, что общая длина УОТ должна бы увеличится на 2 - 4 мм. Решение находится в установке в стойке-стакане 14 подпружиненного опорного конуса 13, представляющего собой полый конус, в основании которого находится, например, крестообразная пластинчатая пружина 12, имеющая свою вершину конической формы.
Фланцевое соединение 15 с применением сварки является, кроме изготовления стоек с фланцевыми оконечностями едиными деталями, наиболее надежным соединением стоек к корпусу 1.
При вращении турбины 8, закрепленной на валу 7, вращается неферромагнитное кольцо 10 с вставленными в него диагональными постоянными магнитами 11. Силовые линии магнитного поля постоянных магнитов, не искажаясь, проходят сквозь неферромагнитную стенку стойки-стакана 14 и пронизывают ХДЧО 9 на основе датчика эффекта Холла. Напряжение в ХДЧО достигает одного-двух пиков (в зависимости от ориентации полюсов магнитов) за один оборот, что является достаточным для определения частоты оборотов и последующего определения тяги СПД.
Тяга СПД с помощью УОТ определяется следующим образом.
1. Определяют зависимость между скоростью 

Зависимость (1) определяют в земных условиях и уточняют на орбите.
2. Включают (СПД)i, где i - условный номер СПД в составе системы коррекции КА, и начинают проведение коррекции орбиты КА.
Операцией 2 начинают этап приведения или перевода и очередной этап тестирования (индекс test) двигателей коррекции, когда требуется проведение больших коррекций разгона (торможения) с целью создания (прекращения) заданной скорости дрейфа по долготе. Изменение периода обращения КА на десятки и сотни секунд поглощают все ошибки определения параметров орбиты.
3. По истечении времени, необходимого для выхода СПД на рабочий режим (через 5, пусть через 10 минут) в темпе выдачи выводят из контакта с валом 7 тормозные колодки 16, подают питание на ХДЧО 9, фиксируют время включения ХДЧО и начальное показание частоты оборотов (установочный ноль).
4. ХДЧО, в свою очередь, фиксирует через N секунд свои показания - частоту оборотов ƒtest i турбины в регулярном режиме разгона. Значение величины N определяют экспериментальным путем. Величина N потребуется для определения тяги СПД (операция 7).
5. По окончании интервала времени Δτf снимают показания с ХДЧО, работающего в связке с вращающимся валом 7. Имеют ƒmax test i.
6. По величине ƒmax test i получают скорость 

Как и N, интервал Δτf находят экспериментальным путем. Нижний предел Δτf оценим следующим образом.
Из уравнения Менделеева-Клайперона (Б.М. Яворский, А.А. Детлаф «Справочник по физике», 8-е издание, стр. 174, 416, М., ОНИКС, 2006 г.) следует, что концентрация молекул идеального газа в исходном, статичном положении (и низкотемпературная плазма с низкой плотностью истечения представляет по параметрам состояния [P,V,T] идеальный газ), следует, что:

где n - концентрация молекул (ионов) идеального газа (плазмы), м3;
р - давление газа (плазмы), Н/м2,
значит, имеется линейная зависимость давления от плотности ρ газового потока:

Формула (4) позволяет сделать следующее заключение. Давление внутри закрытой емкости соответствует определенной плотности. Допустим, что за пределами этой емкости вакуум или космическое пространство. Тогда разница давлений внутри емкости и за ее пределами всегда равна давлению в емкости. Открыв на мгновение эту емкость, мы выпустим порцию газа через отверстие некоторого сечения, и получим скоростной поток, который создаст усилие, толкающее емкость в сторону от направления потока, то есть создадим импульс тяги. Если исход газа из емкости поддерживать на постоянном уровне, то будем иметь устройство, которое можно назвать реактивным двигателем. Плотность потока газа и давление на срезе двигателя в этом случае равны плотности газа и давлению в его изначальном (статичном) положении (соотношение (3)), когда емкость закрыта, и система подачи газа стабилизирует давление. Конечно, здесь еще надо сказать об ускорении ионов в электромагнитных полях двигателя, однако внутрипоточное на выходе из емкости или двигателя и статичное давления все-таки равны, а электрические свойства газа (плазмы) имеют значение в отношении конечной скорости истечения.
Номинальная тяга СПД100 (диаметр выходного отверстия 100 мм) составляет 8,3⋅10-2 Н; это 8,5⋅10-3 кгс; делим на площадь выходного отверстия СПД100, получаем выходное давление РТ 1,1⋅10-4 кгс/см2.
Время Δτf обратно пропорционально скорости потока и обратно пропорционально его плотности, поскольку, чем бóльшая концентрация элементов РТ-газа, тем эффективнее этот поток действует на турбину, тем быстрее определяется частота оборотов вала, и, чем больше скорость потока, тем меньше требуется времени на то, чтобы скорость вращения вала стала максимальной. Значит,

Рассмотрим работу чашечного анемометра. Анемометр выставляют в месте исследования. Включают одновременно счетчик оборотов и секундомер. Через 1-2 мин его работы (этого всегда достаточно для определения любой (0,1 - 30 и более м/с) практической скорости ветра) счетчик отключают, снимают показания и рассчитывают среднюю стационарную частоту вращения чашек через среднее количество оборотов за определенный интервал времени (1-2 мин). В земных условиях давление po равно 1 атм или 101325 Н/м2, скорость 


Это порядка 20 мин. Через 20 мин будем знать удельную тягу СПД. Удельная тяга - это отношение реализованной, фактической тяги к секундному расходу топлива. Если считать секундный расход топлива величиной постоянной (а она зависит только от работы системы подачи топлива в СПД), то с удельной тягой будет известна и тяга СПД. Но, если из показаний УОТ знать еще и фактическую тягу СПД за текущий интервал времени, будем обладать еще и достоверным секундным расходом топлива. А секундный расход подводит нас к достоверным оценкам остатков РТ-газа и перспективам дальнейшей работы с КА.
7. Фактическая тяга СПД определяется по данным первых секунд работы УОТ на фоне работающего СПД. Это следует из того, что любые процессы имеют в основе, хотя бы даже на элементарном уровне, работу, характеризующуюся произведением силы на время или приращением скорости. Потому любые два процесса изменения состояния энергии системы на основе равнопеременных уходов ее характеристик на некотором фиксированном едином интервале времени приводят к отношению исходных усилий (тестовых и корректирующих ускорений), равных отношению приращений скорости или, как в данном случае с УОТ, - к отношению приращений частот оборотов вала 7 с турбиной 8 при разных работах СПД согласно плану.
8. Останавливают вращение вала 7.
9. Проводят ИТНП.
10. Определяют тягу СПД по изменению корректируемого орбитального параметра.
Тягу определяют по известным формулам, например, для почти круговых орбит, (П.Е. Эльясберг «Введение в теорию полета ИСЗ», стр. 66, М., Наука, 1965 г., В.А. Одинцов, В.М. Анучин «Маневрирование в космосе», стр. 22, 23, М., Воениздат, 1974 г.):

где Ftest i - тестовая тяга (СПД)i, Н;
τ - длительность работы (СПД)i при выходе на рабочий режим, с;
аtest i - тестовое ускорение КА от работы (СПД)i , м/с2;
М - масса КА, кг;
ΔT - изменение периода обращения, с;
V - средняя скорость полета, м/с;
Т - период обращения, с;
μ - гравитационный параметр Земли, м3/с2;
r - средний радиус орбиты КА, м,
11. Определяют коэффициент трансформации частоты оборотов вала ƒtest i в тягу (СПД)i:

Операции по пунктам 1 - 11 повторяют на протяжении всего времени довыведения, приведения и перевода. Необходимые статистические данные добирают при любой удовлетворительной возможности с целью уточнения коэффициентов транформации. В случае необходимости специально проводят длительные коррекции, поскольку БО полета с наименьшими трудозатратами (минимизация затрат на штатные циклы контроля орбит многочисленных КА) - актуальная в настоящее время задача.
12. Проводят расчет коррекции.
13. Проводят коррекцию включением выбранного СПД.
14. Фиксируют ƒi.
15. Определяют тягу (СПД)i из соотношения:

Операции по пунктам 12 - 15 повторяют ежесуточно на интервалах от 14 суток, пока ошибки знания и реализации тяги СПД не станут являются неудовлетворительными либо не сменится стратегия удержания КА на заданной орбитальной позиции. По истечении интервалов времени, свободных от контроля орбиты средствами НКУ, проводятся ИТНП.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2767794C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2787522C1 |
| Акселерометр космический | 2019 |
|
RU2721589C1 |
| ВЫСОКОТОЧНЫЙ КОСМИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2468374C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2762586C1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2496689C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ДАВЛЕНИЯ В РАБОЧИХ УСТАНОВКАХ СИЛЬФОННОГО ТИПА | 2011 |
|
RU2477245C2 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2558529C2 |
| Способ предпусковой инерционной сепарации в невесомости газовых включений в жидком компоненте топлива орбитального блока (варианты) | 2021 |
|
RU2775946C1 |
Изобретение относится к области испытаний космических двигателей. Предлагаемое устройство работает по принципу тахометрического расходомера. Оно содержит турбину в виде шнека или стержня с винтовой канавкой, изготовленную из тугоплавкого металла и размещенную внутри стойки, представляющей собой цилиндрическую трубу с газозаборными прорезями. Стойка закреплена в активной зоне плазменного двигателя, где турбина приводится во вращение газовым потоком истекающего рабочего тела. Скорость вращения измеряется магнитным прерывателем тока, по показаниям которого определяют тягу двигателя. Технический результат направлен на повышение достоверности определения тяги двигателя путем непосредственного измерения параметров создающего тягу газового потока (его расхода). 1 ил.
Устройство для определения тяги стационарного плазменного двигателя (СПД), содержащее винтовую турбину в виде шнека или стержня с винтовой канавкой, вал турбины и датчик частоты ее оборотов, отличающееся тем, что турбина, снабженная стойкой и крышкой стойки, и вал турбины размещены в активной зоне (АЗ) СПД и изготовлены из тугоплавкого металла, температура плавления которого выше 1500°С, причем стойка представляет собой цилиндрическую трубу, фланцевым соединением крепящуюся к корпусу СПД в центральной части, с газозаборными прорезями, внутри которой установлена турбина, вал которой концами упирается в опорные конусы, один из которых установлен на внутренней стороне крышки стойки со стороны АЗ СПД, другой, полый и подпружиненный, установлен внутри центральной части стойки-стакана со стороны СПД, противоположной АЗ, причем стакан соединен фланцем с корпусом СПД, а на конце вала со стороны, противоположной АЗ, установлено обжимное кольцо, снабженное двумя постоянными магнитами, приводящими в действие при вращении турбины холловский датчик частоты оборотов турбины.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗМЕНЕНИЙ ТЯГИ ПЛАЗМЕННОГО РАКЕТНОГО ДВИГАТЕЛЯ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1993 |
|
RU2107186C1 |
| US 3834222 A, 10.09.1974 | |||
| SU 675331 A1, 25.07.1979 | |||
| US 10352784 B2, 16.07.2019 | |||
| US 3201980 A, 24.08.1965. | |||

