Изобретение относится к области космической техники и может быть использовано для коррекции параметров движения космического аппарата (КА) с помощью двигательной установки, имеющей двигатели коррекции (ДК) малой тяги, блоки стабилизации давления (БСД) на выходе из блока хранения и подачи топлива.
Предприятию известен способ планирования коррекций, изложенный в рабочей документации предприятия, как часть общей технологической циклограммы решения баллистических задач (циклограмма приведена в Описании), могущий включать в себя, кроме определения ускорения от работы двигателей коррекции (ДК) по данным траекторных измерений параметров движения КА до и после предыдущих [циклов] коррекций, в принципе, любой другой приемлемый способ получения ускорения, который и взят за прототип.
В части независимого от изменений орбитальных параметров по данным траекторных измерений способа-аналога определения ускорений от работы ДК в открытой печати не выявлено. Это способы коррекции орбиты КА, суть которых - в основном отличительном признаке - использование датчиков (и соответствующей им информации), не предназначавшихся ранее для уточнения ускорений от работы ДК, именно для уточнения ускорений от работы ДК. Такой информации на борту КА не так много, но она есть, и ей могут соответствовать способы коррекции. И суть предлагаемого изобретения сводится к тому же - к использованию информации по работе микропереключателей в БСД, отображенной в телеметрии по результатам работы одной из бортовых программ, обслуживающих двигательную установку.
Устройств-акселерометров много, способа коррекции орбитального движения с использованием этих устройств нет. И не может быть, поскольку ни одно из этих устройств не может выявлять ускорения от работы двигателей малой тяги менее 0,1 мм/с2. Для примера можно привести несколько устройств-акселерометров.
1. Известен интегральный микромеханический автоэмиссионный акселерометр (RU 2390031 С1, МПК G01P 15/14), содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорную область, жестко закрепленную относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода, расположенных с зазором над вспомогательными неподвижными электродами, образуя с ними четыре плоских конденсатора, согласно изобретению, дополнительно содержит крестообразный подвес, центральная часть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы, при этом вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом. При возникновении ускорения подложки в направлении одной из осей, опорная рамка вместе с инерционной массой и закрепленными на ней подвижными электродами под действием сил инерции перемещается вдоль этой оси, что приводит к деформации крестообразного подвеса. Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, получают равные приращения вследствие одновременного изменения ширины всех зазоров, характеризуя величину ускорения. При работе в компенсационном режиме сила, воздействующая на опорную рамку с закрепленной на ней инерционной массой, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных неподвижных электродов и вспомогательных подвижных электродов, что позволяет поддерживать постоянными туннельные токи, протекающие между подвижными и неподвижными электродами. Выходным сигналом при этом является величина напряжения, прикладываемого между вспомогательными электродами.
2. Известен трехосевой акселерометр с переменной осевой чувствительностью (RU 2390030 С2, МПК G01P 15/097, G01P 15/18), содержащий инерциальную массу и опорную систему для инерциальной массы, причем опорная система содержит основание и множество опорных элементов, проходящих между основанием и инерциальной массой для подвешивания инерциальной массы в ортогональных направлениях, обеспечивая статически неопределенную конструкцию, датчики напряжений, предназначенные для измерения обусловленного напряжением ускорения в опорных элементах посредством определения параметра ускорения массы. Вместо тензодатчиков возможно использование других датчиков, например пучковых резонаторных систем, в которых частоты колебаний изменяются при изменении нагрузки пропорционально ускорению, формируя соответствующий выходной сигнал.
3. Наиболее близким из известных технических решений является угловой акселерометр (RU 2399915 С1, МПК G01P 15/08), содержащий инерционную массу на упругих подвесах, датчик положения, основание и крышку, отличающийся тем, что в устройство дополнительно введены два постоянных магнита, компаратор, ключ и источник постоянного тока, инерционная масса выполнена из монокристаллического кремния в виде диска с оптическими щелями и размещена в зазоре между постоянными магнитами с возможностью углового перемещения, магниты закреплены на основании и крышке, датчик положения выполнен из двух излучателей и двух фотоприемников, оптические оси которых проходят через оптические щели и закреплены в отверстиях на основании и крышке, на поверхности инерционной массы радиально напылены токопроводящие дорожки, начала и концы которых соединены между собой напыленными токопроводящими кольцами и каждое из колец токопроводами через упругие подвесы соединены с выходами ключа, к первому входу которого подключен источник постоянного тока, а ко второму входу подключен выход компаратора, ко входу которого подключены выходы фотоприемников, а излучатели подключены к источнику постоянного тока.
В устройстве 1 используют то, что «вследствие малости зазора, разделяющего области подвижных и неподвижных электродов, электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами, туннелируют из неподвижных электродов в соответствующие подвижные электроды и тем самым создают туннельные токи, которые являются выходными сигналами устройства».
Недостатком данного устройства является безусловно низкая чувствительность, которую не поднять никакими приемами в данном направлении техники, поскольку теория туннельного эффекта сложна, формула плотности тока, то же, что и силы, имеют специфический для каждого вещества коэффициент и степенную форму, в степени стоят напряженность внешнего электрического поля и величина в тех же единицах, включающая в себя достаточно много нелинейной специфики, относящейся к свойствам электрона. Отсюда следует, что функция изменения силы тока (что можно интерпретировать как ускорение от внешних сил) также не линейна - одни и те же условия опыта не гарантируют качества определения ускорения.
В устройстве 2 возможно применение в его устройстве широкого спектра различных чувствительных элементов, параметры которых изменяются пропорционально ускорению от нагрузки, таких, как тензорезисторы, кристаллические диэлектрики, резонаторные системы. Возможно, у него есть один плюс -массогабаритные характеристики (что не факт, поскольку измерительную систему зачастую приходится наращивать под выбранный диапазон внешних усилий), но и один большой минус - ни одна модификация данного технического решения не приближает точность определения ускорения к точности показаний единичного хорошего датчика, скажем, 1-2%, уже потому, что длинная цепочка датчиковой аппаратуры, преобразовательных цепей, часов от внешнего усилия до результата. В отношении тензодатчиков. Они работают обычно в области упругих деформаций при ε≤10-3, изменяя свое сопротивление пропорционально начальному, ε и коэффициенту тензочувствительности k=2-200, при этом в области малых нагрузок (k - единицы), что имеет место при включениях двигателей коррекции в космосе, собственно эффект исчезает на фоне температурного изменения сопротивления даже при изменении температуры на несколько градусов. Такую теплоизоляцию в условиях космоса обеспечить проблематично. В отношении пьезоэлектрических датчиков. Под действием давления возникают электрические сигналы (суммарная ЕДС пропорциональна давлению) за счет поляризации диэлектрика, пропорциональной некоторому коэффициенту, для кварца 3·10-8, и сильно зависящего от условий работы. В общем эффект с одной стороны тонкий - небольшая величина поляризации, с другой грубоватый - большие внешние нагрузки. И главное - ввиду того, что при относительно постоянном давлении (ускорении), что требуется в космических условиях при определении ускорения движения центра масс КА, эффект быстро исчезает, т.к. электрические заряды «стекают», т.е. пьезодатчики в принципе не применимы. В отношении применения резонаторных систем. Данное техническое решение основано на том, что элемент-камертон, подверженный колебанию от генератора частоты, под действием растяжения/сжатия от воздействия инерционной массы изменяет частоту своих колебаний пропорционально ускорению. Пропорциональность возможна еще при колебательном движении инерционной массы, и маловероятна при поступательном движении, которое необходимо при определении ускорения от работы двигателя. В любом случае точность определения изменения результирующего колебания резонатора весьма низкая, либо технически сложная задача.
Опускаем рассмотрение чисто механических всякого рода пружинных систем со стрелками - они явно непригодны для такого деликатного дела, как определение ускорения при тяге двигателя коррекции движения центра масс КА, схожей с дуновением ветра.
Устройство 3, в принципе, дает хорошие результаты и обладает приемлемыми массогабаритными характеристиками, однако устройство предназначено строго для определения угловых ускорений от внешних сил и должно находиться в центре инерции, отступление от которого вносит значительные погрешности определения углового ускорения. Это большой недостаток данного решения. И данное техническое решение по своей функциональности непригодно для вышеуказанной задачи определения поступательного ускорения.
В способе-прототипе выполняется следующая последовательность операций (несущественные детали опускаются):
1. Отрабатывается план коррекций бортовой системой навигации и управления движением.
2. Проводят траекторные измерения.
Траекторные измерения представляют собой штатный цикл измерений текущих навигационных параметров (ИТНП), количество сеансов измерений и количество интервалов между сеансами составляет для суточного интервала и наличии двух пунктов наземных измерений от 4 до 6.
3. Выполняют программу определения параметров движения центра масс КА.
4. Уточняют управляющие ускорения по изменению орбитальных параметров.
Уточнение не позволяет определять управляющие ускорения точнее диапазона значений ускорений, оговоренных заводом-изготовителем. Оно гарантирует отслеживание аномальной работы ДК, и, в случае затяжной и, возможно, постоянной ситуации, когда (пока) отказ ДК не зафиксирован на борту КА, все-таки рассчитывать план коррекций. При уточнении применяется эвристический метод: есть начальные условия (НУ) движения по предыдущему ИТНП, есть текущие НУ согласно п.п.1-3, есть предыдущий план коррекций, включающий в себя до трех условных номеров ДК, решается задача прихода в текущие НУ без больших погрешностей по контролируемым параметрам движения.
5. Выполняют программу расчета (составления) плана коррекций удержания КА в окрестности орбитальной позиции на интервале от даты расчета до начала следующего штатного цикла ИТНП.
6. Выполняют программы генерации массивов командно-программной информации (КПИ), содержащих НУ (вектор кинематических параметров движения), план коррекций, проекции ускорений от ДК на оси связанной с КА системы координат.
7. Засылают обобщенную форму КПИ на борт КА.
Далее пп.1-7 повторяются в течение всего времени работы КА по целевому назначению.
Недостатком прототипа является относительно низкая точность определения ускорений от работы ДК, которая держится на уровне 10-11%, гарантированном заводом-изготовителем двигательной установки.
Целью предлагаемого изобретения является создание надежного и оперативного способа коррекции орбитального движения, повышение точности коррекций параметров движения центра масс КА и качества удержания КА в заданной области по широте и долготе за счет уточнения ускорений от работы ДК, и гарантированный резерв сужения пределов удержания геостационарных КА на орбитальной позиции.
Использование информации по работе микропереключателей в стабилизаторе давления (СД), входящем в состав БСД, отображенной в телеметрии по результатам работы одной из бортовых программ, обслуживающих двигательную установку, в состав которой входят термокаталитические ДК, является в заданных конструкторских условиях единственным подходом к количественному определению ускорений от работы ДК на каждом шаге плана коррекций и по результатам отработки этого плана. Дело в том, что определение ускорений от нескольких ДК на интервале плана (от 1 суток до 3 месяцев) и определение ускорения от одного ДК при единичном включении малой (как обычно) длительности по результатам траекторных измерений представляет не решаемую удовлетворительно задачу.
Поставленная цель достигается тем, что в способе коррекции орбитального движения КА, включающем приложение корректирующего воздействия путем включения ДК, проведение траекторных измерений, определение параметров движения центра масс КА, расчет плана коррекций, формирование массивов КПИ, содержащих начальные условия движения, план коррекций и управляющие ускорения, и засылку этих массивов на борт КА, введены новые операции, заключающиеся в том, что: прикладывают тестовое воздействие к корпусу КА путем включения ДК, фиксируют показания счетчика срабатывания электроклапанов на входе в БСД в процессе приложения тестового и корректирующего воздействий, определяют ускорения от работы ДК по следующей зависимости:
 ,
,
где ai, аiтест - ускорения от i-го ДК соответственно при корректирующем и тестовом воздействии, м/с2;
Ni, Niтест - количество срабатываний электроклапанов на входе в БСД соответственно при корректирующем и тестовом воздействии i-м ДК.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1. Проводят траекторные измерения.
Эта операция аналогична п.2 прототипа. При наличии автономной (бортовой) радионавигации траекторные измерения ведутся в непрерывном режиме.
2. Прикладывают тестовое воздействие.
Для этого в запланированное время производят включение ДК и отрабатывают импульс, обеспечивающий изменение параметра движения, например, периода обращения, достаточное для надежного определения по нему величины ускорения от работы ДК. В этом суть тестирования. Длительность тестового воздействия порядка 1-2 час.
3. Фиксируют число срабатываний электроклапанов на входе в БСД в процессе приложения тестового воздействия.
Работа БСД
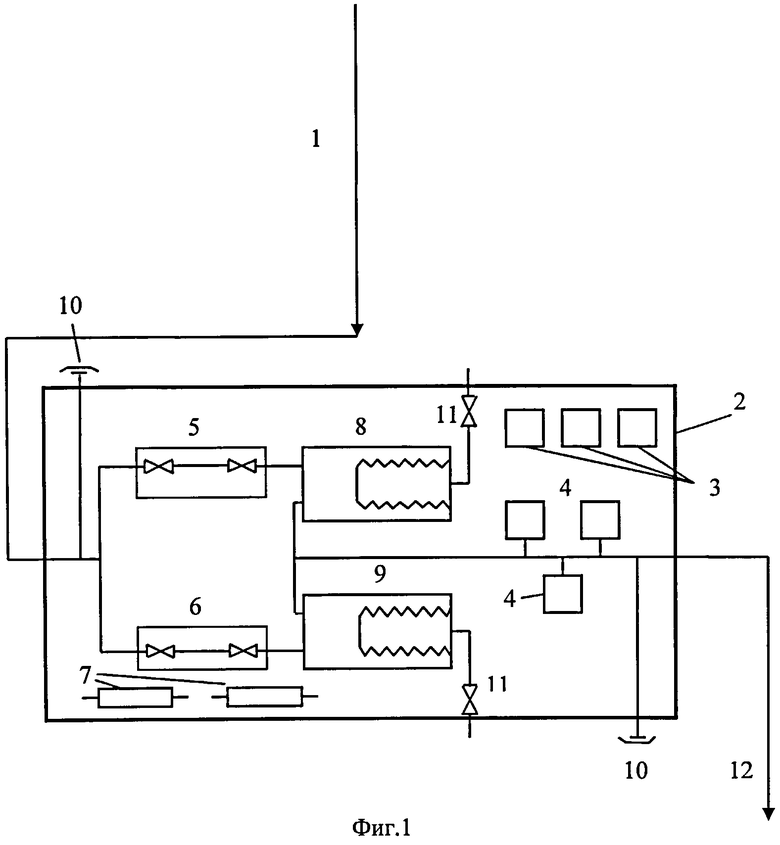
Схема БСД приведена на фиг.1. На фиг.1 приведены следующие обозначения:
1 - из блока хранения и подачи топлива;
2 - БСД;
3 - термодатчики;
4 - датчики давления;
5 - КУ1, КУ2;
6 - КУ3, КУ4;
7 - нагреватели;
8 - основной СД (СД1);
9 - резервный СД (СД2);
10 - штуцер проверочный;
11 - КУ5, КУ6;
12 - на двигатель.
Управление заполнением рабочей дозы топлива, поступающей в расходную полость БСД - 2 осуществляется блоком управления бортового комплекса управления (БУ БКУ) по состоянию сочетаний (замкнуто/разомкнуто) концевых микропереключателей соответствующим включением электроклапанов КУ1, КУ2 - 5 при работе на стабилизаторе давления (СД)1 - 8 или КУ3, КУ4 - 6 при работе на резервном стабилизаторе СД2 - 9. При открытии клапанов КУ1, КУ2 полости СД1 и СД2 заполняются топливом и сжимают подпружиненные сильфоны СД1 и СД2 до срабатывания пары концевых микропереключателей СД1 (размыкание). По этому сочетанию контактов клапаны КУ1, КУ2 закрываются. По израсходовании рабочей дозы топлива (замыкание) производится включение КУ1, КУ2, начинается заполнение рабочей дозы топлива, при размыкании концевых микропереключателей питание с клапанов снимается, клапаны КУ1, КУ2 закрываются. В исходном состоянии БУ БКУ осуществляет управление СД1. Кроме того, БУ БКУ осуществляет автоматический перевод управления на резервный СД2 при достижении давления топлива на выходе до уровней менее 1,2 кгс/см2 или более 2,2 кгс/см2.
Бортовая программа (условно БП), входящая в программное обеспечение (ПО) системы коррекции, заявляется в очередь готовых задач по команде «Заявка БП», выдаваемой из ПО бортового комплекса управления по факту изменения значений ТМ-параметров «Включение/выключение электроклапанов». Предусматривается постоянная работа БП в течение всего срока существования изделия. После заявки БП увеличивает свой «счетчик заявок» на 1 и снимается с очередей задач. Программа БП представляет в каждом случае своей работы в поле программы «Непосредственная передача» ПО БКУ значение своего счетчика. Значение счетчика указывает, сколько раз наполнялся и опорожнялся блок стабилизации давления, то же - сколько раз происходило срабатывание микропереключателей в стабилизаторе, то же - сколько раз сработали электроклапаны.
Итак, имеем число срабатываний Niтест.
4. Проводят траекторные измерения.
5. Выполняют программу определения параметров движения центра масс КА. Операция аналогична п.3 прототипа.
6. Рассчитывают ускорение от работы i-го ДК по результатам траекторных измерений пп.1, 4.
Ускорение по результатам траекторных измерений рассчитывают по известным методикам, исходя из фактического значения изменения корректируемого параметра движения КА. Имеем аiтест.
Пп.1-6 повторяют для всех ДК. Тестирование планируется проводить примерно раз в полгода - год из-за старения конструкции БСД, главным образом - пружинных устройств в СД, и «ухода» систематической составляющей ускорения (тяги) вследствие старения конструкции ДК.
7. Рассчитывается план коррекций.
Операция аналогична п.5 прототипа.
8. Выполняют программы генерации массивов командно-программной информации (КПИ), содержащих НУ (вектор кинематических параметров движения), план коррекций, проекции ускорений от ДК на оси связанной с КА системы координат.
Операция аналогична п.6 прототипа.
9. Засылают обобщенную форму КПИ на борт КА.
Операция аналогична п.7 прототипа.
10. Прикладывают корректирующее воздействие.
Т.е. отрабатывается шаг плана коррекций бортовой системой навигации и управления движением.
Эта операция аналогична п.1 прототипа. Коррекции, согласно плану, проводят шагами - 1-2 двигателями коррекции на суточном интервале, если проводятся коррекции наклонения, либо эпизодично, если проводятся только коррекции долготы КА.
11. Фиксируют число срабатываний электроклапанов на входе в БСД в процессе приложения корректирующего воздействия.
12. Определяют ускорение от работы ДК из соотношения
,
где ai, аiтест - ускорения от i-го ДК соответственно при корректирующем и тестовом воздействии, м/с2;
Ni, Niтест - количество срабатываний электроклапанов на входе в БСД соответственно при корректирующем и тестовом воздействии i-м ДК.
В рабочих условиях эксплуатации двигательной установки на интервале между тестированиями только секундный расход топлива определяет тягу и соответствующее ей ускорение (удельная тяга для определенного класса ДК (признанных работоспособными) постоянна). Текущее количество срабатываний концевых микропереключателей и показания счетчика заявок БП прямо зависят от секундного расхода топлива, значит, - от ускорения.
13. Информацию по ускорениям от каждого ДК в процессе эксплуатации КА осредняют и, тем самым, уточняют после отработки плана коррекций.
Далее пп.1-13 повторяются в течение всего времени работы КА по целевому назначению.
Следует отметить.
1. Поскольку ДК устанавливаются с некоторой ошибкой относительно центра масс КА, работе ДК всегда сопутствует работа двигателей ориентации КА. Эта работа (независимо от того, конструктивно разделены или нет системы коррекции и ориентации) вносит определенную погрешность в определение управляющих ускорений от работы ДК. В данном варианте конструкции двигательной установки БСД может обслуживать одновременно до трех двигателей одного технического класса: один ДК и до двух двигателей ориентации из соответствующих двигательных блоков. Двигатели ориентации работают в 4-секундных циклах в импульсном режиме - 0,25с<τвкл≤4с, частота включений не более одного раза в 4 с. Суммарная порция топлива из двух СД составляет порядка 6 см3, время расхода составляет порядка 2 мин, суммарное число срабатываний электроклапанов на интервале коррекции орбиты КА порядка 1 часа порядка 60. Суммарная длительность работы двигателей ориентации не превышает 1-3% от длительности работы ДК, по идеологии управления КА, что укладывается в точность исполнения коррекции орбитального движения.
2. Удельная тяга с течением времени падает. Во всех случаях (п.6 изобретения) - вследствие аномального (неполного) преобразования исходного тела двигательной установки (газ) в рабочий продукт, в данном случае - в продукты распада под действием высокой температуры в камере разложения. Поскольку ДК работает, в отличие от двигателей ориентации, в непрерывном режиме, и используется только в рабочем состоянии, которое оценивается в жестких пределах по выходной характеристике - тяге, то можно распространять на все ДК один коэффициент трансформации

некоего числа срабатывания электроклапанов на входе в БСД некоему ускорению от одного из ДК при тестирующем воздействии, т.е. тестировать только БСД. Однако, наиболее строгим и точным будет проводить тестирование БСД и каждого ДК в отдельности.
3. Наличие тела наддува и сильфона в топливных баках (блоках хранения и подачи) сглаживает, но не устраняет монотонность снижения давления по мере выработки топлива. Минимально допустимое давление в баке всегда превышает диапазон рабочих давлений в БСД. Количество срабатываний электроклапанов на входе в БСД при работах ДК уменьшается. Однако, время наполнения БСД топливом, хотя и зависит от давления в топливном баке, пренебрежимо мало и составляет менее секунды на всем диапазоне рабочих давлений в топливных баках против 2 мин его расхода из БСД. Значит, эффективная тяга (отношение требуемого импульса к фактической длительности коррекции) будет отличаться от приборной менее чем на 1%. Тестирование двигательной установки автоматически учитывает и этот фактор.
Предлагаемый способ коррекции орбитального движения КА позволяет:
1) определить управляющие ускорения без лишних затрат и с высокой точностью, последовательно - по мере необходимости, для каждого ДК;
2) повысить точность удержания геостационарного КА по долготе с ±0,1° до гарантированной ±0,05°;
3) гарантированно увеличить срок управления центром масс КА в неавтономном режиме (от одних траекторных измерений до других) с 15 до 30 суток;
4) считать:
- приведенный способ коррекции орбитального движения КА способом, обеспечивающим минимальный срок баллистического обеспечения полета КА в автономном режиме;
- приведенный способ коррекции орбитального движения КА при наличии бортовой системы радионавигации резервным вариантом автономного баллистического обеспечения полета КА.
Изобретение относится к космической технике и может быть использовано для коррекции орбитального движения космического аппарата (КА). На КА прикладывают тестовое и корректирующее воздействие путем включения двигателей коррекции (ДК), проводят траекторные изменения, определяют параметры движения центра масс КА, рассчитывают коррекцию, формируют командно-программную информацию с начальными условиями движения, планом коррекции и управляющими ускорениями, засылают массивы на борт КА для дальнейшей работы. Изобретение позволяет с высокой точностью определять управляющие ускорения, повысить точность удержания геостационарного КА, увеличить срок управления центром масс КА в неавтономном режиме. 1 ил.
Способ коррекции орбитального движения космического аппарата (КА), включающий приложение корректирующего воздействия путем включения двигателя коррекции (ДК), проведение траекторных измерений, определение параметров движения центра масс КА, расчет коррекций, формирование массивов командно-программной информации, содержащих начальные условия движения, план коррекций и управляющие ускорения, и засылку этих массивов на борт КА, отличающийся тем, что прикладывают тестовое воздействие к корпусу КА путем включения двигателя коррекции (ДК), фиксируют число срабатываний электроклапанов на входе в блок стабилизации давления (БСД) в процессе приложения тестового и корректирующего воздействий, определяют ускорения от работы ДК по следующей зависимости:
где ai, аiтест - ускорения от i-го ДК соответственно при корректирующем и тестовом воздействии, м/с2;
Ni, Niтест - количество срабатываний электроклапанов на входе в БСД соответственно при корректирующем и тестовом воздействии i-м ДК, и по результатам отработки планов коррекций имеют набор достоверных значений ускорений для дальнейшей работы с КА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ ЕГО УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ПРИВОДОВ | 1997 |
|
RU2114031C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| US 20090206204 A1, 20.08.2009 | |||
| US 6341249 B1, 22.01.2002 | |||
| US 6371413 B1, 16.04.2002. | |||

