Изобретение относится к аэрокосмической технике и может быть использовано для обеспечения управления размещенной на летательном/космическом аппарате переносной аппаратурой наблюдения на двухстепенной поворотной платформе при выполнении наблюдений подстилающей поверхности.
Известен способ управления целевой аппаратурой космического аппарата (КА), реализуемый системой управления телевизионным видеоспектральным комплексом КА (патент РФ 2068801, МПК 6: B64G 9/00), который включает наведение и отслеживание целей, при которых выполняется переориентация оси визирования установленной на поворотной платформе телевизионной и научной аппаратуры на выбираемую в реальном времени по ТВ-изображению цель с последующим автоматическим отслеживанием цели, в том числе выполняется определение пространственного положения прибора наведения относительно КА, задание координат целей, определение положения целей относительно прибора наведения, расчет углов поворота прибора наведения и повороты прибора наведения.
К недостаткам способа относится, в частности, то, что он допускает наведение только на цели, с одной стороны, ограниченные диапазоном углов поворота поворотной платформы, а с другой стороны, ограниченные попаданием в текущий кадр ТВ-изображения, который, кроме упомянутого ограничения по диапазону углов поворота поворотной платформы, имеет ограниченный охват, определяемый полем зрения ТВ-камеры. При этом сам факт размещения аппаратуры наведения на поворотной платформе ограничивает свободу перемещения аппаратуры при ее нацеливании и сопровождении цели экипажем КА.
Известен способ ориентации целевой аппаратуры КА (Аншаков Г.П., Макаров В.П., Мантуров А.И., Мостовой Я.А. Методы и средства управления в высокоинформативном наблюдении Земли из космоса. XIV Санкт-Петербургская Международная конференция по интегрированным навигационным системам, 28-30 мая 2007, стр. 165-173. Санкт-Петербург, Россия, 2007), включающий измерение параметров углового движения КА, формирование и выдачу на приводы инерционных исполнительных органов управляющих сигналов, создание минимальных моментов инерции КА путем перемещения аппаратуры и элементов конструкции к центру масс КА, изменение параметров углового движения инерционных масс инерционных исполнительных органов и соответствующее ему изменение параметров углового движения КА с неподвижно установленной на нем целевой аппаратурой, определение накопленного инерционными массами инерционных исполнительных органов кинетического момента, формирование и выдачу управляющих сигналов в систему сброса кинетического момента.
К недостаткам способа относится, в частности, то, что для обеспечения переориентации (программных поворотов) и стабилизации в требуемом положении целевой аппаратуры используют инерционные массы инерционных исполнительных органов.
Известен способ ориентации целевой аппаратуры КА на основе автоматических поворотных платформ (Лобанов B.C., Тарасенко Н.В., Шульга Д.Н., Зборошенко В.Н., Федосеев С.В., Хаханов Ю.А. Системы наведения целевой аппаратуры на основе автоматических поворотных платформ для PC МКС. XIV Санкт-Петербургская Международная Конференция по интегрированным навигационным системам, 28-30 мая 2007, стр. 206-213. Санкт-Петербург, Россия, 2007 - прототип), заключающийся в размещении на КА двух- или трех-степенном кардановом подвесе с приводами по каждой из осей автоматических поворотных платформ, установке на автоматических поворотных платформах измерителей угловой скорости, астродатчиков и вычислительного устройства, определении по измерениям с измерителей угловой скорости и астродатчиков параметров углового движения автоматических поворотных платформ, формировании управляющих сигналов на приводы, обеспечивающие пространственные повороты автоматических поворотных платформ, отработке системой управления угловым движением КА возмущений, создаваемых в процессе поворотов автоматических поворотных платформ.
К недостатками способа - прототипа относится, в частности, то, что автоматические поворотные платформы с целевой аппаратурой возможно размещать только на КА, инерционно-массовые характеристики (масса, моменты инерции) которых на два, три и более порядка превышают инерционно-массовые характеристики автоматических поворотных платформ с целевой аппаратурой.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение длительной работоспособности приборного комплекса, содержащего переносную аппаратуру наблюдения на поворотной платформе.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в повышении надежности управления переносной аппаратуры наблюдения на поворотной платформе за счет обеспечения равномерной наработки приводов поворотной платформы.
Технический результат достигается тем, что в способе управления размещенной преимущественно на космическом аппарате переносной аппаратурой наблюдения на двухстепенной поворотной платформе, включающем определение параметров углового движения поворотной платформы по каждой из осей поворота, формирование управляющих воздействий на приводы поворотной платформы при выполнении сеансов наблюдения объектов, расположенных на подстилающей поверхности, в отличии от прототипа, перед началом сеанса наблюдений направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения, определенное в связанной с поворотной платформой системе координат в период воздействия на один из приводов поворотной платформы, совмещают с определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, во время сеанса наблюдений выставку оси визирования аппаратуры наблюдения в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на данный привод поворотной платформы и измеряют время наработки привода в сеансе наблюдений, при этом в начальных последовательных сеансах наблюдений с указанным определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают поочередно направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия соответственно на один и на другой привод поворотной платформы, а в последующих сеансах наблюдений с указанным определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на привод с наибольшим суммарным временем наработки.
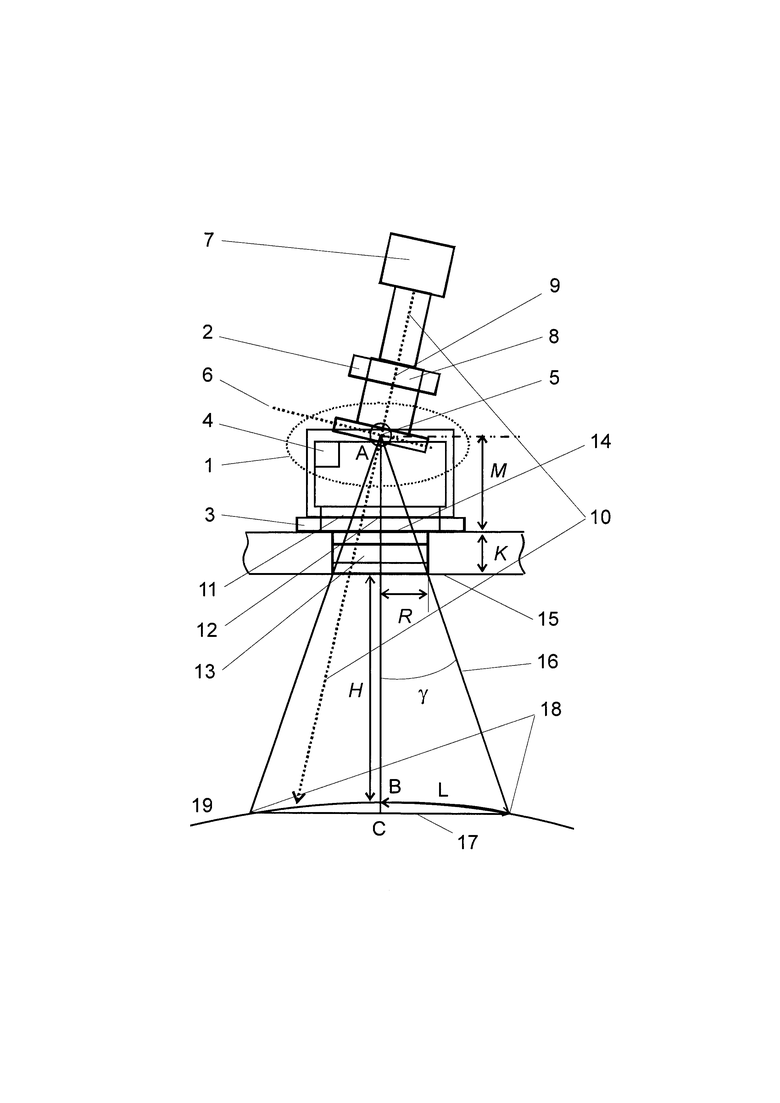
Изобретение поясняется рисунком схемы использования на космическом аппарате переносной аппаратуры наблюдения, закрепляемой на двухстепенной поворотной платформе, на котором введены обозначения:
1 - двухстепенной подвес;
2 - узел разъемного крепления переносной аппаратуры наблюдения;
3 - узел съемной установки поворотной платформы на иллюминатор;
4 - вычислительное устройство;
5 - первая ось подвеса;
6 - вторая ось подвеса;
7 - переносная аппаратура наблюдения;
8 - отверстие узла разъемного крепления переносной аппаратуры наблюдения;
9 - ось отверстия узла разъемного крепления переносной аппаратуры наблюдения;
10 - ось чувствительности переносной аппаратуры наблюдения;
11 - отверстие узла съемной установки поворотной платформы на иллюминатор;
12 - ось отверстия узла съемной установки поворотной платформы на иллюминатор;
13 - иллюминатор;
14 - внешняя поверхность узла съемной установки поворотной платформы на иллюминатор;
15 - внешняя поверхность корпуса аппарата;
16 - прямой конус;
17 - основание прямого конуса;
18 - граница требуемой зоны обзора подстилающей поверхности переносной аппаратурой наблюдения;
19 - подстилающая поверхность;
М - расстояние от первой оси подвеса до внешней поверхности узла съемной установки поворотной платформы на иллюминатор;
R - радиус иллюминатора;
K - толщина корпуса аппарата в месте расположения иллюминатора,
Н - минимальное значение расстояния от аппарата до подстилающей поверхности;
А - точка пересечения осей подвеса;
В - подспутниковая точка;
АС - высота прямого конуса;
γ - угол полураствора прямого конуса;
L - радиус требуемой зоны обзора подстилающей поверхности переносной аппаратурой наблюдения.
Поясним предложенные в способе действия.
Рассмотрим бортовой приборный комплекс в составе переносной аппаратуры наблюдения, съемно закрепляемой на двухстепенной поворотной платформе, съемно устанавливаемой на бортовой иллюминатор.
Например, приборный комплекс содержит: двухстепенной подвес 1 с взаимно перпендикулярными осями подвеса и размещенными по осям подвеса датчиками угла и приводами, узел разъемного крепления переносной аппаратуры наблюдения 2, узел съемной установки поворотной платформы на иллюминатор 3 и вычислительное устройство 4.
Например, двухстепенной подвес может быть выполнен следующим образом. Первый привод обеспечивает вращение первой рамки подвеса относительно корпуса подвеса вокруг первой оси подвеса 5, а первый датчик угла обеспечивает измерение углового положения первой рамки подвеса относительно корпуса подвеса. Второй привод обеспечивает вращение второй рамки подвеса относительно первой рамки подвеса вокруг второй оси подвеса 6, а второй датчик угла обеспечивает измерение углового положения второй рамки подвеса относительно первой рамки подвеса.
Выходы датчиков угла и входы приводов соединены с соответственно входами и выходами вычислительного устройства 4. Вычислительное устройство 4 выполнено таким образом, что один из его выходов приспособлен к соединению с переносной аппаратурой наблюдения 7.
Узел разъемного крепления переносной аппаратуры наблюдения 2 снабжен отверстием 8, выполненным с возможностью совмещения оси данного отверстия (оси отверстия узла разъемного крепления переносной аппаратуры наблюдения 9) с осью чувствительности переносной аппаратуры наблюдения 10.
Узел съемной установки поворотной платформы на иллюминатор 3 снабжен отверстием 11, выполненным с возможностью совмещения оси данного отверстия (оси отверстия узла съемной установки поворотной платформы на иллюминатор 12) с осью иллюминатора 13. В установленном положении поворотной платформы внешняя поверхность узла съемной установки поворотной платформы на иллюминатор 14 обращена к иллюминатору.
Данные узлы и данные отверстия выполнены так, что ось отверстия узла разъемного крепления переносной аппаратуры наблюдения 9 и ось отверстия узла съемной установки поворотной платформы на иллюминатор 12 проходят через точку пересечения осей подвеса А.
Узел съемной установки поворотной платформы на иллюминатор 3 выполнен неподвижным относительно положения первой оси подвеса 5 (например, при вышеописанной реализации подвеса узел съемной установки поворотной платформы на иллюминатор 3 жестко соединен с корпусом подвеса), при этом первая ось подвеса 5 перпендикулярна оси отверстия узла съемной установки поворотной платформы на иллюминатор 12.
Положение второй оси подвеса 6 фиксировано относительно узла разъемного крепления переносной аппаратуры наблюдения 2 (например, при вышеописанной реализации подвеса узел разъемного крепления переносной аппаратуры наблюдения 2 жестко (неподвижно) соединен со второй рамкой подвеса), при этом отверстие узла разъемного крепления переносной аппаратуры наблюдения 8 выполнено так, что ось отверстия узла разъемного крепления переносной аппаратуры наблюдения 9 перпендикулярна второй оси подвеса 6.
Величину показанного на рисунке угла у можно определять как величину угла полураствора прямого конуса, граница основания которого совпадает с границей требуемой зоны обзора подстилающей поверхности переносной аппаратурой наблюдения, а высота равна минимальному расстоянию от аппарата до подстилающей поверхности.
Переносную аппаратуру наблюдения 7 размещают на поворотной платформе посредством узла разъемного крепления переносной аппаратуры наблюдения 2 (узел разъемного крепления переносной аппаратуры наблюдения обеспечивает возможность использования для реализации наблюдений различной сменной аппаратуры наблюдения). При этом выход вычислительного устройства 4, приспособленный к соединению с переносной аппаратурой наблюдения 7, соединяют с переносной аппаратурой наблюдения 7.
Согласно предлагаемого способа определяют в связанной с поворотной платформой системе координат направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на первый привод поворотной платформы (в рассматриваемом примере данное направление совпадает с первой осью подвеса 5) и направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на второй привод поворотной платформы (в рассматриваемом примере данное направление совпадает со второй осью подвеса 6).
Перед началом сеанса наблюдений поворотную платформу устанавливают на иллюминатор (посредством узла съемной установки поворотной платформы на иллюминатор) таким образом, что направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения, определенное в связанной с поворотной платформой системе координат в период воздействия на один из приводов поворотной платформы совмещено с определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата.
В качестве примера на рисунке представлена схема расположения поворотной платформы относительно летательного/космического аппарата, на которой вектор скорости аппарата направлен по перпендикуляру к плоскости рисунка и направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения, определенное в связанной с поворотной платформой системе координат в период воздействия на первый привод поворотной платформы (совпадает с первой осью подвеса 5) совмещено с направлением вектора скорости аппарата (т.е. составляет с ним нулевой угол).
Во время сеанса наблюдений выставку оси визирования аппаратуры наблюдения в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на данный (в представленном на рисунке примере - первый) привод поворотной платформы и измеряют время наработки данного привода в сеансе наблюдений.
Например, по данным от датчиков угла, установленных по осям подвеса, определяют текущее угловое положение рамок подвеса и в вычислительном устройстве формируют команды управления соответствующим приводом подвеса, обеспечивающие выставку соответствующей рамки подвеса в расчетное положение, при котором обеспечивается наведение оси чувствительности переносной аппаратуры наблюдения через иллюминатор в расчетное положение для последующей реализации наблюдения требуемого объекта наблюдения на подстилающей поверхности. После этого в момент, когда за счет орбитального движения аппарата требуемый объект наблюдения на подстилающей поверхности окажется на заданном расстоянии от оси чувствительности переносной аппаратуры наблюдения, вычислительное устройство формирует и выдает на переносную аппаратуру наблюдения команду на выполнение съемки.
Отметим, что в рассматриваемом примере - в случае выполнения наблюдений подстилающей поверхности через иллюминатор аппарата, - для обеспечения максимальной ширины обзора подстилающей поверхности через иллюминатор аппаратуру наблюдения предварительно (перед началом выполнения наблюдений) поворачивают до достижения минимального угла между осью визирования аппаратуры наблюдения и плоскостью, перпендикулярной вектору аппарата.
Согласно предлагаемого способа в начальных последовательных сеансах наблюдений с указанным определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают по очереди направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия соответственно на один и на другой привод поворотной платформы. В последующих сеансах наблюдений с указанным определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на привод с наибольшим суммарным временем наработки.
Например, в первом сеансе наблюдений с указанным определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на первый привод поворотной платформы. И далее во время первого сеанса наблюдений выставку оси визирования аппаратуры наблюдения в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на первый привод поворотной платформы и измеряют время наработки первого привода в сеансе наблюдений.
Во втором сеансе наблюдений с указанным определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на второй привод поворотной платформы. И далее во время второго сеанса наблюдений выставку оси визирования аппаратуры наблюдения в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на второй привод поворотной платформы и измеряют время наработки второго привода в сеансе наблюдений.
В каждом следующем (третьем, четвертом и т.д.) сеансе наблюдений с указанным определяемым в связанной с аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на привод с наибольшим суммарным временем наработки, измеренным на момент окончания предыдущего сеанса наблюдений.
Опишем технический эффект предлагаемого изобретения.
Предложенное техническое решение повышает надежность управления переносной аппаратуры наблюдения на поворотной платформе за счет обеспечения равномерной наработки приводов поворотной платформы.
Использование предложенного способа обеспечивает равномерную наработку всех приводов поворотной платформы и исключает возникновение ситуации, кода один из приводов поворотной платформы имеет небольшую наработку и гарантировано находится в работоспособном состоянии (т.е. имеет существенный запас по ресурсу), а другой привод поворотной платформы имеет большую наработку, близкую к ресурсу привода (т.е. привод близок к своему предельному состоянию, при котором велика вероятность возникновения отказа),
Тем самым обеспечивается длительная работоспособность бортового приборного комплекса, содержащего переносную аппаратуру наблюдения на поворотной платформе.
Значимость указанного эффекта при применении предлагаемого технического решения обусловливается тем, что, в полете отсутствует или существенно ограничена возможность выполнения ремонтно-восстановительных работ бортовых приборов, в частности приводов поворотной платформы.
При этом предлагаемое техническое решение полностью обеспечивает возможность целевого использования аппаратуры наблюдения без ограничений - т.е. предложенная в предлагаемом способе методика поочередного задействования приводов поворотной платформы не ограничивает возможности выполнения наблюдений объектов, расположенных на подстилающей поверхности.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717603C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2771488C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2772766C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725009C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717614C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725104C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725012C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2780900C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| КОСМИЧЕСКАЯ ОПТИЧЕСКАЯ ЛИНИЯ СВЯЗИ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1997 |
|
RU2106749C1 |
Изобретение относится к аэрокосмической технике. Способ управления размещенной на космическом аппарате (КА) аппаратурой наблюдения (АН) на двухстепенной поворотной платформе (ПП) включает определение параметров углового движения ПП по каждой из осей поворота, формирование управляющих воздействий на приводы ПП при выполнении наблюдения объектов на подстилающей поверхности. Перед началом сеанса наблюдения направление вектора угловой скорости (ВУС) поворота оси визирования (ОВ) АН, определенное в связанной с ПП системе координат (СК) в период воздействия на один из приводов ПП, совмещают с определяемым в связанной с аппаратом СК направлением, составляющим минимальный угол с вектором скорости КА. Во время сеанса выставку ОВ АН в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на данный привод ПП и измеряют время наработки привода. В начальных сеансах с направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают поочередно направление ВУС поворота ОВ АН в период воздействия соответственно на один и на другой привод ПП. В последующих сеансах с направлением, составляющим минимальный угол с вектором скорости аппарата, совмещают направление ВУС поворота ОВ АН в период воздействия на привод с наибольшим временем наработки. Технический результат заключается в повышении надежности за счет равномерной наработки приводов. 1 ил.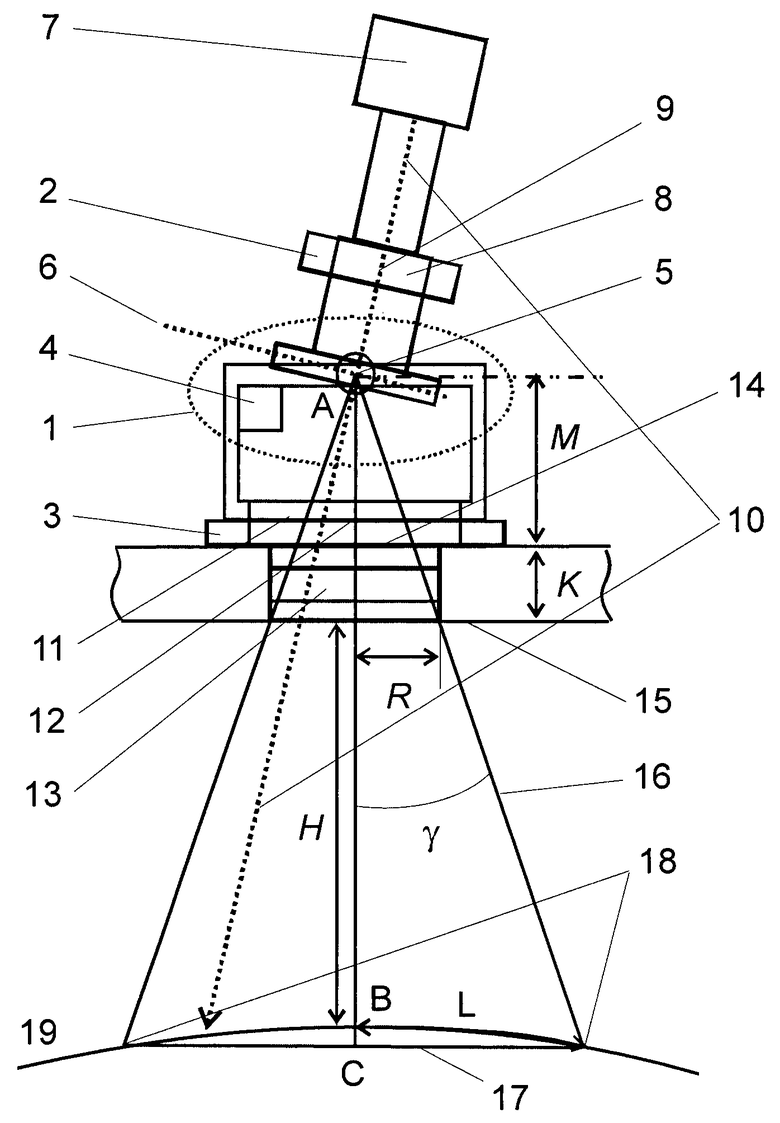
Способ управления размещенной преимущественно на космическом аппарате переносной аппаратурой наблюдения на двухстепенной поворотной платформе, включающий определение параметров углового движения поворотной платформы по каждой из осей поворота, формирование управляющих воздействий на приводы поворотной платформы при выполнении сеансов наблюдения объектов, расположенных на подстилающей поверхности, отличающийся тем, что перед началом сеанса наблюдений направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения, определенное в связанной с поворотной платформой системе координат в период воздействия на один из приводов поворотной платформы, совмещают с определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости космического аппарата, во время сеанса наблюдений выставку оси визирования аппаратуры наблюдения в требуемые для наблюдения объектов положения осуществляют формированием управляющих воздействий на данный привод поворотной платформы и измеряют время наработки привода в сеансе наблюдений, при этом в начальных последовательных сеансах наблюдений с указанным определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости космического аппарата, совмещают поочередно направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия соответственно на один и на другой приводы поворотной платформы, а в последующих сеансах наблюдений с указанным определяемым в связанной с космическим аппаратом системе координат направлением, составляющим минимальный угол с вектором скорости космического аппарата, совмещают направление вектора угловой скорости поворота оси визирования аппаратуры наблюдения в период воздействия на привод с наибольшим суммарным временем наработки.
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРЫ | 2018 |
|
RU2695046C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717614C1 |
| WO 2016190994 A1, 01.12.2016 | |||
| СВЕТОМУЗЫКАЛЬНЫЙ ИНСТРУМЕНТ | 1991 |
|
RU2033834C1 |

