Данное изобретение относится к технике электрической связи, а именно к технике космической оптической связи и, в частности, к устройствам космических оптических линий связи между объектами, в качестве которых могут быть искусственные спутники Земли, космические аппараты, орбитальные станции, наземные пункты и т.д.
Известна космическая оптическая линия связи (КОЛС) между наземной станцией и геостационарным экспериментальным искусственным спутником Земли (ИСЗ) ЕТS-VI, разрабатываемая по проекту Японского национального агентства по космическим исследованиям с 1985 г. [1-3]. Известная КОЛС содержит приемо-передающую аппаратуру (ППА) с оптической антенной (ОА), установленную на ИСЗ ЕТS-VI и ППА с ОА, установленную на наземной станции. Антенна приемо-передающей аппаратуры, размещенной на ИСЗ, состоит из оконечного оптического узла, выполненного в виде зеркала, и неподвижного телескопа. Зеркало помещено на опоре, имеющей подвижный и неподвижный узлы, реализующие кинематическую схему двухстепенного карданного подвеса с разворотами по углу азимута и углу места (склонения), отсчитываемыми в приборной системе координат подвеса. Зеркало отражает оптическое излучение, выходящее из оптической системы неподвижного телескопа и несущее информационные сигналы, в направлении на наземную станцию и, соответственно, направляет на вход оптической системы телескопа оптическое излучение, приходящее от наземной станции. Антенна ППА, установленной на наземной станции, состоит из оконечного оптического узла, выполненного в виде передающего и принимающего телескопов, размещенных на общей опоре, имеющей подвижный и неподвижный узлы и реализующей кинематическую схему двухстепенного угломестно-азимутального карданного подвеса. Известная КОЛС не обеспечивает возможность непрерывной оптической связи между наземной станцией и ИСЗ в случае его вращения вокруг своего центра масс, а вследствие использования в ОА на ИСЗ зеркала ограничена рабочая зона обзора антенны, причем эффективность использования поверхности зеркала существенно снижается при уменьшении угла между оптической осью неподвижного телескопа и направлением на другой объект, в данном случае на наземную станцию.
Известны также КОЛС, в которых ППА имеет поворачиваемую телескопическую ОА, опора которой реализована с использованием кинематической схемы двухстепенного угломестно-азимутального карданного подвеса [4-7]. Эти известные КОЛС не могут обеспечить постоянную непрерывную связь между двумя объектами в случае, когда хотя бы один из них совершает в течение установленного сеанса связи более одного полуоборота относительно направления на другой объект.
Известна КОЛС между двумя ИСЗ по проекту SILEX (Semicon- ductor Laser Intersatellite Link Experiment), разрабатываемому Европейским космическим агентством с середины 1980-х годов [8-9]. Известная КОЛС, являющаяся прототипом предлагаемого технического решения, содержит один комплект ППА на низкоорбитальном ИСЗ SPOT-4, предназначенном для зондирования Земли, и второй комплект ППА на геостационарном экспериментальном ИСЗ ARTEMIS [9]. Антенны ППА на обоих ИСЗ - поворотные и телескопические, а именно: оконечный оптический узел ОА выполнен в виде телескопа, установленного на опоре, кинематическая схема которой представляют собой двухстепенной карданный подвес с приводами разворотов. Конструктивно опора состоит из поворотного и неподвижного узлов. Поворотный узел опоры выполнен с возможностью разворотов телескопического оконечного оптического узла антенны вокруг его поперечной оси по углу места и разворотов этого узла относительно неподвижного узла опоры по углу азимута в приборной системе координат подвеса. Неподвижный узел опоры жестко закреплен посадочной поверхностью на корпусе ИСЗ. При этом обеспечивается возможность разворотов оптической оси антенны по углу места в диапазоне от 0 до 70 градусов и по углу азимута от 0 до 180 градусов.
Известный прототип, также как и аналоги, в силу указанного исполнения ППА и размещения ОА на объектах не обеспечивает возможности постоянной устойчивой связи между объектами даже в пределах их взаимной видимости в случае, если вращается хотя бы один из них, или если угол между линией визирования другого объекта и неподвижной осью карданного подвеса опоры антенны в процессе связи становится меньше некоторого определенного значения, или если в поле зрения антенны попадает элемент конструкции объекта.
Невозможность постоянной устойчивой связи между объектами при вращении одного из них или обоих возникает из-за того, что в этом случае угловые положения оптической оси оконечного оптического узла антенны данного объекта при визировании другого объекта в процессе указанного вращения выходят за пределы рабочей зоны возможных углов разворотов этой оси, то есть за пределы так называемой статической зоны обзора ОА.
Невозможность постоянной устойчивой связи между объектами возникает также, если в процессе орбитального полета объектов оптическая ось оконечного узла антенны ППА данного объекта при отслеживании другого объекта должна разворачиваться внутри конуса динамической нерабочей зоны антенны, находящегося в ее рабочей зоне, то есть в статической зоне обзора, причем с угловой скоростью, при которой превышается максимально возможная конструктивная скорость поворота оконечного оптического узла. Обычно в известных устройствах этот конус является круговым и симметричным, причем его ось симметрии совпадает с осью разворотов поворотного узла опоры антенны данного объекта относительно неподвижного узла, то есть с неподвижной осью карданного подвеса.
Величина угла А раствора указанного кругового конуса зависит от угла Ф полураствора диаграммы направленности ОА на прием, максимальной угловой скорости ωл линии визирования другого объекта относительно неподвижного узла опоры ОА и максимальной конструктивной угловой скорости ωп разворота поворотного узла и может быть определена по формуле
При характерных для КОЛС величинах углов Ф, составляющих единицы угловых секунд - угловые минуты, и таких отношениях угловых скоростей ωп/ωл > 1, при которых с точностью до малой величины второго порядка sin(Фωп/ωл) ≈ Фωп/ωл, угол А может быть вычислен в первом приближении согласно выражению
A = 2arcsin(ωл/ωп). (2)
Величина угла А уменьшается от 23 до 1,5 градусов по мере увеличения отношения угловых скоростей ωп/ωл от 5 до 100. Таким образом, для уменьшения размеров динамической нерабочей зоны ОА необходимо увеличивать максимальную конструктивную угловую скорость разворота ее поворотного узла. Однако это увеличение связано с ростом массы, габаритов и энергопотребления приводов ОА, что ухудшает технико-эксплуатационные характеристики ППА.
Вектор угловой скорости ωл определяется как сумма вектора угловой скорости ωo вращения космического объекта вокруг собственного центра масс и вектора угловой скорости ωd вращения вектора дальности объектов относительно друг друга в пространстве.
Диапазон значений величины ωd от 0,02 градуса в секунду (при связи между геостационарным и низкоорбитальным ИСЗ) до единиц и даже десятков градусов в секунду (при связи между низкоорбитальными ИСЗ, находящимися на орбитах с пересекающимися плоскостями).
Диапазон значений величины ωo от 0,07 градуса в секунду при ориентации объекта в орбитальной полетной системе координат (закрутка объекта с орбитальной угловой скоростью) до 1-3 градуса в секунду при "тепловой" закрутке объекта или его одноосной ориентации на Солнце.
Следовательно, диапазон возможных значений величины ωл составляет от 0,1 градуса в секунду до единиц - десятков градусов в секунду. Соответственно, величина ωп должна обеспечиваться на уровне не менее 1-5 градусов в секунду при связи между геостационарным и низкоорбитальным ИСЗ, ориентированным на Землю, а при связи между низкоорбитальными ИСЗ - на уровне десятков градусов в секунду.
Известный прототип, помимо изложенного выше недостатка, обладает также существенным недостатком, характерным и для других упомянутых КОЛС: для обеспечения непрерывности связи между двумя объектами необходимо установить не менее трех-четырех ОА на каждом вращающемся объекте. Установка антенн при этом должна производиться таким образом, чтобы их зоны обзора возможных положений другого объекта относительно данного в проекции на единичную сферу, центр которой условно помещен в центр масс данного объекта, суммарно полностью перекрывали всю эту единичную сферу, а динамические нерабочие зоны антенн не имели общих областей. Это позволяет непрерывно отслеживать перемещаемый объект с помощью одной из антенн в пределах ее динамической рабочей зоны обзора, когда отслеживание перемещаемого объекта остальными ОА невозможно. Очевидно, что при установке указанного количества ОА, которыми следовало бы оснастить ППА на каждом вращающемся ИСЗ в прототипе КОЛС для получения возможности непрерывной оптической связи, возрастут общая масса, габариты и энергопотребление ППА при уменьшении времени полезного использования каждой из антенн.
Задача изобретения - обеспечение непрерывной оптической связи между объектами, один из которых или оба вращаются, при установке не более двух ОА на каждом вращающемся объекте с одновременным повышением надежности и обеспечением функциональной гибкости КОЛС, заключающейся в получении, при необходимости, возможности одновременной связи одного из объектов с двумя другими, что важно в условиях многолетней эксплуатации КОЛС.
Решение данной задачи достигается тем, что в КОЛС, содержащей размещенную на каждом объекте ППА с оптической антенной, оконечный оптический узел которой установлен на опоре, состоящей из поворотного и неподвижного узлов, причем поворотный узел опоры выполнен с возможностью разворотов относительно него оконечного оптического узла вокруг его поперечной оси и разворотов поворотного узла относительно неподвижного узла опоры, жестко закрепленного посадочной поверхностью на корпусе объекта, введена по крайней мере на одном объекте вторая ОА с оконечным оптическим узлом, посадочные поверхности неподвижных узлов опор первой и второй ОА на одном объекте обращены друг к другу, оси разворотов оконечных оптических узлов антенн относительно поворотных узлов опор перекрещиваются с осями разворотов поворотных узлов относительно неподвижных узлов опор, оси разворотов поворотных узлов опор первой и второй ОА на одном объекте образуют в проекции на параллельную этим осям плоскость угол В не более 90 и не менее угла А раствора конуса динамической нерабочей зоны разворотов ОА, ось симметрии которого совпадает с осью разворотов поворотного узла опоры относительно неподвижного узла, а диапазон перекрытия углов разворотов поворотных узлов относительно неподвижных узлов опор составляет не менее
180o + 2arcsin(sin(A/2)/sinB) (3)
Условие (3) соответствует обеспечению полной сферической динамической рабочей зоны суммарно для двух установленных ОА.
Посадочные поверхности неподвижных узлов опор двух ОА, установленных на одном объекте, например на диаметрально противоположных сторонах его корпуса, обращены в пространстве лицевой стороной друг к другу (в предлагаемом варианте посадочные поверхности плоские и параллельны друг другу).
Поворотные узлы опор выполнены с возможностью угловых разворотов оптических осей оконечных оптических узлов вокруг их поперечных осей в диапазоне углов от А/2 до 180o - А/2, отсчитываемых от осей разворотов поворотных узлов относительно неподвижных узлов опор.
Сущность изобретения поясняется фиг. 1-6 для возможного варианта КОЛС. На фиг. 1 показано схематичное изображение КОЛС; на фиг. 2 - кинематическая схема опоры ОА; на фиг. 3 - общий вид ОА по направлению оси разворотов поворотного узла; на фиг. 4 - общий вид ОА по направлению оси разворотов оконечного оптического узла; на фиг. 5 - размещение двух ОА на объекте; на фиг. 6 - схематичное изображение рабочих зон обзора двух ОА.
Устройство КОЛС согласно предлагаемому изобретению состоит в следующем.
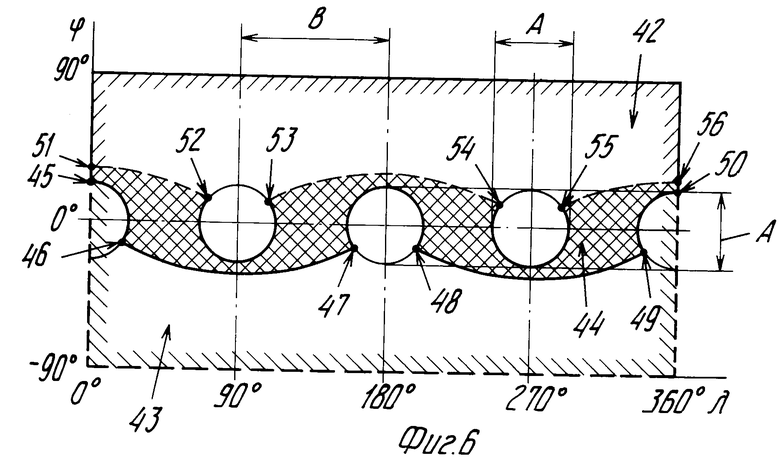
Космическая оптическая линия связи (фиг.1) между объектом 1 и объектом 2 содержит установленную на них ППА. ППА на объекте 1 имеет в своем составе основной блок 3, оптическую антенну 4 с оконечным оптическим узлом (телескопом) и систему 5 транспортировки излучаемого и принимаемого световых потоков между антенной 4 и блоком 3. ППА на объекте 2 имеет в своем составе основной блок 6, оптические антенны 7 и 8 с поворачиваемыми телескопами, системы 9 и 10 транспортировки излучаемого и принимаемого антеннами 7 и 8 световых потоков между этими антеннами и блоком 6. При этом телескопы антенн 4,7,8 имеют, соответственно, диаграммы направленности 11,12,13 на передачу (излучение) с углом Ф полураствора конуса излучения (например, на уровне интенсивности, равной 0,5) и диаграммы направленности 14,15,16 на прием с углом Ф0 полураствора конуса поля обзора телескопа.
В качестве объектов 1 и 2 могут быть различные космические объекты: космические аппараты, орбитальные станции или искусственные спутники. В некоторых случаях один из объектов, например объект 1, может быть стационарной либо мобильной станцией на поверхности или в атмосфере планеты (Земли), ее естественного спутника. Для определенности при дальнейшем изложении будем подразумевать под термином "объект" прежде всего движущийся по своей траектории (орбите) какой-либо космический объект.
Между ППА объекта 1 и ППА объекта 2 устанавливается оптическая связь с использованием антенн 4,7,8. При этом если есть взаимная видимость антенн 4 и 7 и осуществляется дуплексная (двухсторонняя) связь с их использованием, то ОА 4 объекта 1 соединена оптически через космическое пространство 17 принимаемым световым пучком 18 с ОА 7 объекта 2, а ОА 7 объекта 2 соединена оптически через космическое пространство 17 принимаемым световым пучком 19 с ОА 4 объекта 1. Если есть взаимная видимость антенн 4 и 8 и осуществляется дуплексная (двухсторонняя) связь с их использованием, то ОА 8 объекта 2 соединена оптически через космическое пространство 17 принимаемым лучом 20 с ОА 4 объекта 1, а ОА 4 объекта 1 соединена оптически через космическое пространство 17 принимаемым лучом 21 с ОА 8 объекта 2.
При отсутствии взаимной видимости одной из указанных пар антенн имеет место дуплексное (двухстороннее) оптическое соединение другой пары ОА, а при начале перехода на двухстороннюю связь с использованием иной пары антенн вместо работающей с ОА 4 может иметь место симплексное (одностороннее) оптическое соединение ОА 7 световым пучком 18 (или ОА 8 световым пучком 21).
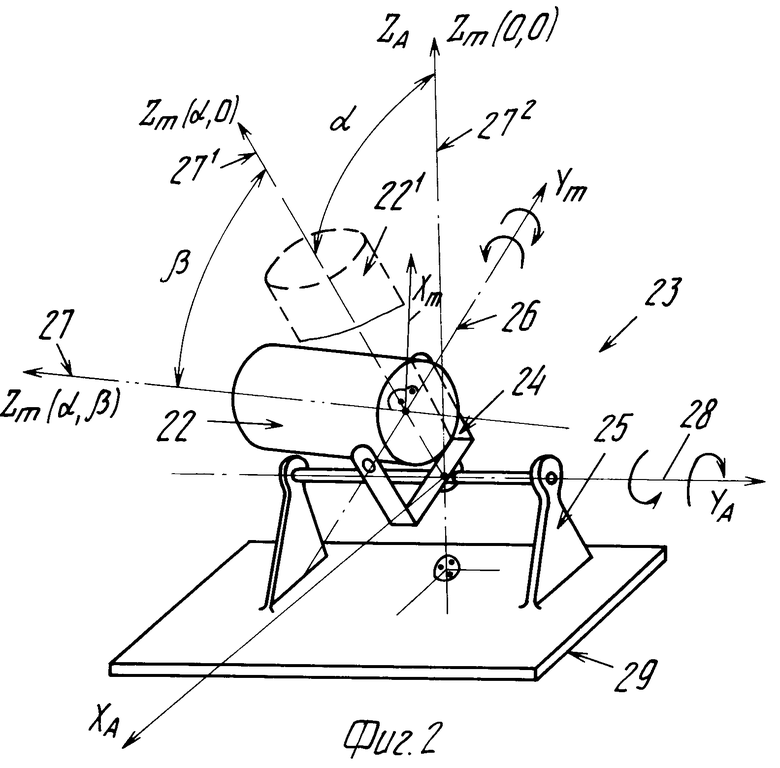
Антенны 4,7,8 содержат оконечные оптические узлы, выполненные, например, в виде телескопов 22 (фиг. 2-4), размещенные на опорах 23, состоящих из поворотного узла 24 и неподвижного узла 25 и имеющих кинематические схемы типа двухстепенных карданных подвесов (фиг.2).
Узел 24 опоры 23 согласно этой кинематической схеме выполнен в виде внутренней рамки карданного подвеса с возможностью разворотов телескопа вокруг поперечной оси 26 (оси координат Ym телескопа) на угол β, отсчитываемый от положения оптической оси 27 телескопа 22 - оси координат Zm(α,0) телескопа, когда она находится в положении поз. 271, то есть в плоскости, перпендикулярной оси 28 разворотов узла 24 относительно неподвижного узла 25.
Неподвижный узел 25 выполнен согласно используемой кинематической схеме с возможностью разворотов относительно него узла 24 вокруг оси 28 (ось координат YA антенны) на угол α, отсчитываемый от исходного положения 272 оптической оси 27 телескопа, когда она параллельна оси ZA антенны, то есть от оси координат Zm (0,0) телескопа при его нулевых угловых отклонениях. При этом ось координат антенны ZA перпендикулярна оси 28 и посадочной плоскости 29 неподвижного узла 25 опоры 23 (фиг.2,3,4). Ось координат ХA антенны дополняет систему координат антенны до правосторонней, а центр этой системы координат помещен на оси 28 и лежит в плоскости, образуемой осями Zm, Ym телескопа. Начало правосторонней системы координат Хm Ym Zm телескопа помещено в точке пересечения оптической оси 27 телескопа с его поперечной осью 26 и обычно совпадает с центром масс телескопа.
Ось 26 разворотов телескопа 22 относительно поворотного узла 24 пересекается с осью 28 разворотов поворотного узла относительно неподвижного узла 25, то есть они лежат в параллельных плоскостях, отстоящих друг от друга, и не имеют общих точек, а их проекции на произвольную параллельную им плоскость образуют некоторый угол, обычно составляющий 90 градусов.
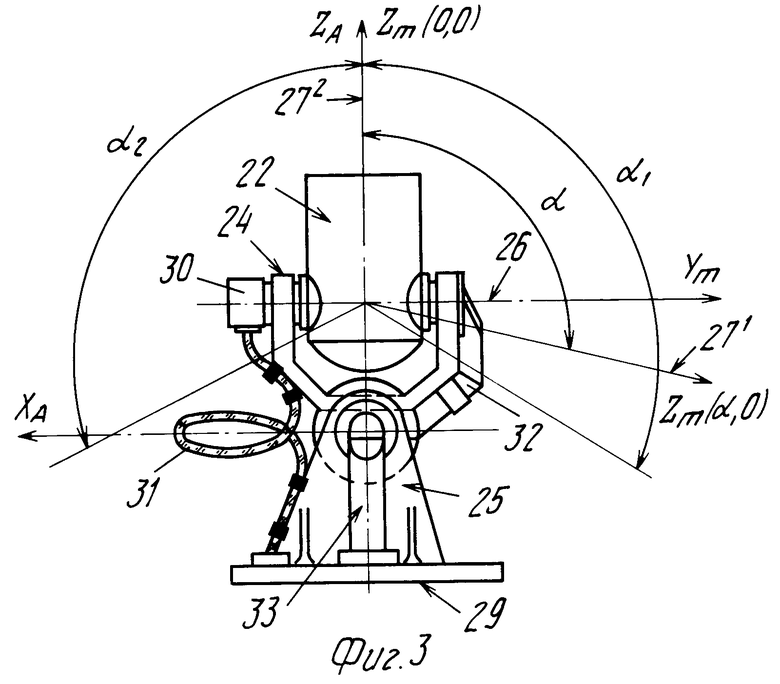
На поворотном узле 24 антенны установлен привод 30 разворотов телескопа 22 вокруг оси 26 (фиг. 3,4). Электрическое питание привода 30, управление им и связь с датчиками угловых разворотов телескопа вокруг оси 26 обеспечивается с помощью электрического многожильного кабеля 31, имеющего петлеобразный участок для свободных его перемещений при разворотах узла 24 с телескопом 22 относительно узла 25.
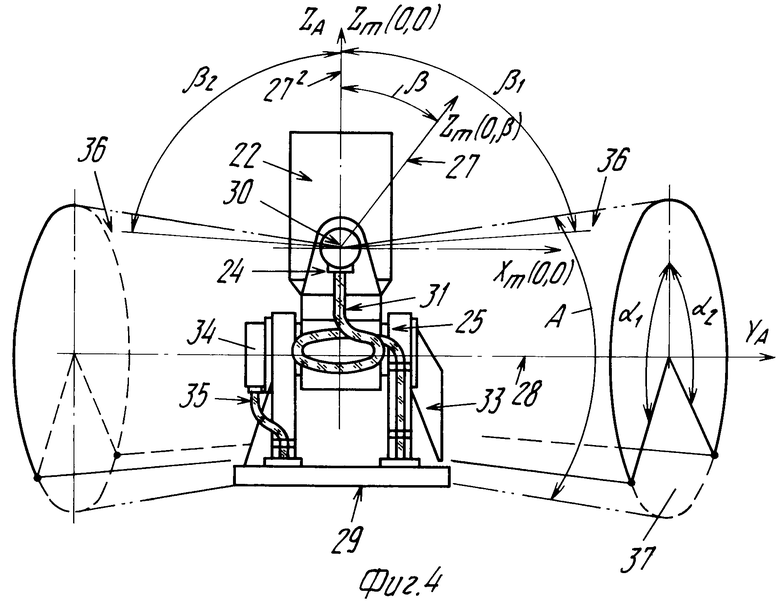
На узле 25 установлен привод 34 разворотов поворотного узла 24 вокруг оси 28 (фиг. 4). Электрическое питание привода 34, управление им и связь с датчиками угловых разворотов узла 24 вокруг оси 28 производится с помощью электрического многожильного кабеля 35, жестко закрепленного на узле 25.
Поворотный узел 24 выполнен с возможностью его разворотов по углу α вместе с телескопом вокруг оси 28 с обеспечением угловых отклонений α1 и α2 проекции 271 оптической оси 27 телескопа на плоскость ХA,ZA системы координат антенны, отсчитываемых от исходного нулевого положения 272 оптической оси телескопа (фиг.3). Обычно эти угловые отклонения конструктивно устанавливают равными друг другу по модулю.
Конструктивное исполнение узла 24 и телескопа 22 позволяет разворачивать телескоп 22 по углу β вокруг оси 26 с угловыми отклонениями β1 и β2 проекции оптической оси 27 телескопа 22 на плоскость YA, ZA, отсчитываемыми от исходного нулевого положения 272 оптической оси телескопа (фиг.4).
Вследствие ограничений угловой скорости ωп разворотов поворотного узла 24 вокруг оси 28 при определенных угловых скоростях ωл требуемого углового движения оптической оси телескопа, сопровождающего линию визирования другого объекта, становится невозможным отслеживание этого объекта в пределах так называемой динамической нерабочей зоны 36 (фиг.4). Зона 36 представляет собой круговой конус с углом раствора А, ось симметрии которого совпадает с осью 28 разворотов узла 24 и у которого "вырезана" долевая часть 37 из-за ограничений статической рабочей зоны обзора по углам α1 и α2 разворотов узла 24.
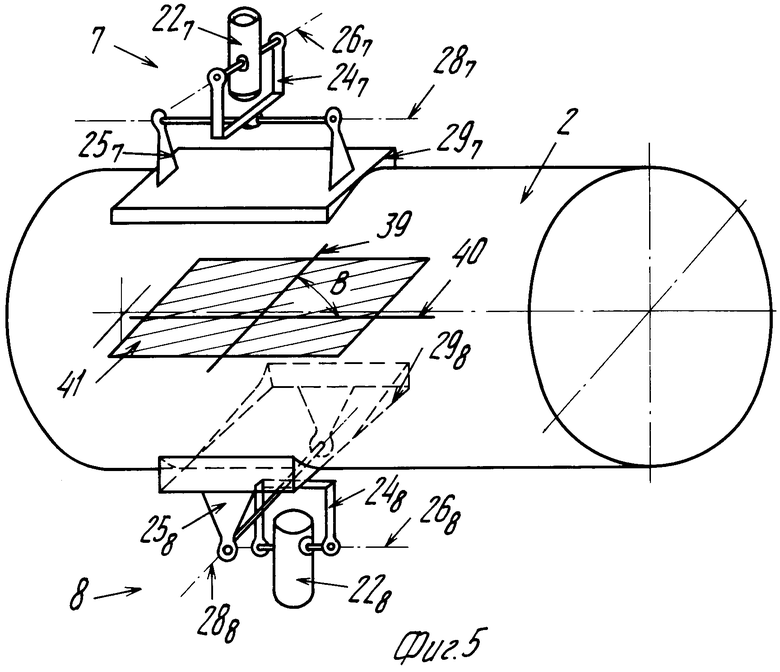
Согласно предлагаемому техническому решению в КОЛС введена, в частности, на вращающемся объекте 2 дополнительно к первой антенне 7 с телескопом 227 вторая антенна 8 с телескопом 228 (фиг.5). Аналогично при вращении объекта 1 на нем тоже должна быть установлена еще одна ОА.
Оси 287 и 288 вращения поворотных узлов 247 и 248 опор ОА 7 и второй ОА 8 на объекте 2 перекрещиваются, то есть установлены относительно друг друга в параллельных плоскостях, и соответствующие проекции 39 и 40 этих осей на параллельную им одновременно плоскость 41 пересекаются под углом В. Величина угла В (имеется в виду наименьший из смежных углов между проекциями 39 и 40) составляет не более 90 градусов и не менее угла А раствора конуса 36 динамической нерабочей зоны ОА 7 и 8.
При этом условии, указанном для выбора величины угла В, динамические нерабочие зоны обеих ОА не имеющих общих областей. При произвольном значении угла В из указанного диапазона для безразрывного перекрытия суммарной рабочей зоной обзора обеих антенн полной сферы вокруг объекта 2 необходимо конструктивное обеспечение возможности разворотов телескопов антенн 7 и 8 в пределах угла перекрытия
Посадочные поверхности 297 и 298 неподвижных узлов 257 и 258 опор антенн 7 и 8 на объекте 2 могут быть выполнены в частном случае плоскими. ОА 7 и 8 установлены с жестким креплением неподвижных узлов 257 и 258 опор в диаметрально противоположных зонах на корпусе объекта 2. При этом неподвижные узлы опор обращены посадочными поверхностями 297 и 298 друг к другу с обеспечением параллельности их плоскостей.
Схематичное изображение рабочих зон обзора двух ОА предсталено на фиг. 6 в сферических координатах ϕ,λ, где λ - угол долготы для направления линии визирования другого объекта, а ϕ - угол широты для направления этой линии визирования. Угол долготы отсчитывается в плоскости 41 (фиг.5) от проекции 40 оси 287 против часовой стрелки, а угол широты - по кратчайшему пути от плоскости 41 в направлении к ее нормали, причем положительное значение угла широты принимается для случаев, когда его отсчет ведется в сторону разворота к антенне 7.
ОА 7 имеет рабочую зону 42 обзора (фиг.6), граница которой показана сплошной линией с короткой штриховкой внутрь зоны. У ОА 8 рабочая зона 43 обзора изображена с пунктирной линией границы, имеющей короткую штриховку внутрь этой зоны. Общая область 44 рабочих зон обеих ОА на фиг.6 заштрихована полностью. Границы динамических нерабочих зон ОА на фиг.6 показаны в виде дуг окружностей, имеющих диаметр, соответствующий углу А раствора конуса 36 динамической нерабочей зоны (см.фиг.4). При этом на фиг.6 дуги 45-46, 47-48, 49-50 соответствуют антенне 7, а дуги 52-53, 54-55 - антенне 8.
Зоны 42 и 43 на фиг.6 изображены для случая, когда угол В между проекциями 39 и 40 на фиг. 5 равен 90 градусам.
Угол перекрытия по угловому развороту поворотного узла 24 с телескопом 22 на оси 28 (фиг. 3,4), при котором обеспечивается, согласно предлагаемому техническому решению, полная сферическая рабочая зона обзора суммарно двумя ОА, должен удовлетворять условию (4), которому соответствуют отрезки 46-47, 48-49 синусоидальных кривых для антенны 7 и отрезки 51-52, 53-54, 55-56 синусоидальных кривых для антенны 8 на фиг.6. Эти отрезки могут либо касаться дуг окружностей, отображающих границы динамических нерабочих зон антенн, если вышеприведенное условие обеспечивается при знаке равенства, либо "охватывать" указанные границы, если имеет место строгое неравенство.
На фиг. 6 показан случай, когда для обеих ОА при В = 90o указанные отрезки синусоидальных кривых отвечают неравенству
abs(α1) = abs(α2)>90°+A/2. (5)
Достаточно просто показать также, что угол перекрытия по разворотам телескопа должен отвечать условию
180°≥βs= abs(β1)+abs(β2)≥180°-A, (6) которое при равенстве модулей углов поперечных разворотов может быть преобразовано к виду
90°≥abs(β1) = abs(β2)≥90°-A/2. (7)
Из неравенства (7) вытекает достаточность выполнения условия
abs(β1) = abs(β2) = 90°-A/2, (8) которому соответствуют границы динамических нерабочих зон на фиг.6.
Предлагаемая КОЛС работает следующим образом.
На определенном интервале времени между ППА объекта 1 и ППА объекта 2 устанавливается дуплексная (двухсторонняя) оптическая связь с использованием антенн 4 и 7 (фиг.1), если есть взаимная оптическая видимость этих ОА и выполняется условие: оптические оси телескопов этих ОА направлены друг на друга с необходимой точностью, и отслеживаются взаимные перемещения, возникающие вследствие их относительного движения со скоростью Vотн и вращения объектов, например, объект 2 вращается с угловой скоростью ωo.
Антенна 4 объекта 1 соединена оптически через космическое пространство 17 принимаемым световым пучком 18 с антенной 7 объекта 2, а антенна 7 объекта 2 соединена оптически через космическое пространство 17 принимаемым световым пучком 19 с антенной 4 объекта 1.
Световой пучок 18, поступающий на антенну 4, представляет собой часть светового излучения антенны 7, распространяемого на длине волны λ2 в конусообразной области с углом полураствора Ф0 диаграммы направленности телескопа 220 антенны 7 на излучение (фиг.5).
Соответственно, световой пучок 19, поступающий на телескоп 22 антенны 7, представляет собой часть светового излучения антенны 4, распространяемого на длине волны λ1 в конусообразной области с углом Ф0 полураствора диаграммы направленности антенны 4 на излучение.
При передаче информации между объектами световые излучения, посылаемые антеннами на определенных длинах волн оптического диапазона спектра электромагнитных излучений, промодулированы в передающем устройстве основного блока ППА. Например, при формировании информационных потоков в цифровом виде предпочтение может быть отдано кодово-импульсной модуляции.
В процессе дуплексной связи, осуществляемой антеннами 4 и 7 оптическая ось телескопа 227 совершает угловые движения, которые соответствуют точкам ϕ,λ, лежащим в зоне 42 (фиг.6).
Вследствие вращения объекта 2 антенна 7 может подойти к такому состоянию, когда ее телескоп 227 уже не будет способен отслеживать направление на телескоп антенны 4 объекта 1, то есть траектория отображающих точек ϕ,λ ориентации оптической оси телескопа подойдет к границе 45-46-47-48-49-50 зоны 42.
Для того, чтобы оптическая линия связи между объектами не прервалась, за некоторое время до прихода антенны 7 в это состояние начинается прицеливание оптической оси телескопа 228 антенны 8 объекта 2 на телескоп антенны 4 объекта 1. Это прицеливание осуществляется в зоне 44 одновременного обзора телескопами 227 и 228.
Как только в пределы конусообразной области с углом полураствора Ф диаграммы направленности на прием телескоп 22 антенны 8 попадает световой пучок 20 излучения, идущего от ОА 4 и распространяемого на длине волны λ1 начнется процесс наведения и отслеживания телескопом 228 ОА 8 направления на телескоп ОА 4 объекта 1. После этого блок 6 переключает передачу светового излучения на систему 10 транспортировки световых потоков и отключает систему 9 транспортировки световых потоков, в результате чего происходит отключение ОА 7 и переход на двухстороннюю связь между объектами с помощью антенн 4 и 8. При этом на телескоп ОА 4 объекта 1 поступает световой пучок 21 от телескопа 228 ОА 8. Оптическая ось телескопа 228 начинает перемещаться, отслеживая направление на телескоп антенны 4 объекта 1 светового пучка, причем траектория отображающих точек ϕ,λ оптической оси этого телескопа будет находиться до определенного момента в зоне 43.
В дальнейшем при подходе оптической оси телескопа 228 ОА 8 к границе ее зоны обзора или к границе ее динамической нерабочей зоны, то есть ломаной линии 51-52-53-54-55-56, происходит аналогичная процедура переключений с ОА 8 на ОА 7 и с системы 10 транспортировки световых потоков на систему 9.
В процессе наведения оптической оси Zm телескопа соответствующей антенны и отслеживания ею направления на телескоп другого объекта основной блок ППА, установленной на данном объекте, управляет разворотами телескопа 22 (фиг. 3-4) вокруг его оси 26 на угол β в пределах от 0 до ±(90o -А/2) и разворотами поворотного узла 24 вместе с телескопом 22 вокруг оси 28 на угол α в пределах от 0 до ±(90o + А/2). Команды на развороты телескопа 22 поступают на привод 30 по многожильному кабелю 31, по которому подается электрическое питание на этот привод и который служит для передачи сигналов с датчиков угловых разворотов телескопа 22 вокруг оси 26. Команды на развороты поворотного узла 24 вокруг оси 28 подаются по многожильному кабелю 35, осуществляющему также по отдельным жилам подачу электропитания на привод 34 и передачу сигналов от датчиков угловых разворотов поворотного узла 24.
Таким образом, в результате:
- соответствующего исполнения ОА в виде оконечного оптического узла (телескопа), устанавливаемого на опоре, выполненной с использованием кинематической схемы двухстепенного карданного подвеса, имеющего ось разворотов поворотного узла, параллельную плоскости посадочной поверхности неподвижного узла опоры;
- установки второй ОА с вышеуказанным угловым смещением оси разворотов поворотного узла ее опоры относительно оси разворотов поворотного узла опоры первой ОА, выполненного в плоскости, параллельной оси разворотов поворотного узла первой ОА,
- размещения антенн в диаметрально противоположных частях объекта с обращением плоскостей их посадочных поверхностей лицом друг к другу, обеспечивается решение поставленной задачи - становится возможна непрерывная оптическая связь между объектами при вращении одного из них или обоих в процессе взаимного их перемещения относительно друг друга (при вращении обоих объектов необходимо будет установить на каждом из них вторую антенну с соответствующей системой транспортировки лучей от этой антенны к основному блоку ППА), а также при минимально возможном количестве ОА (не более двух) и при одновременном повышении надежности и функциональной гибкости КОЛС, заключающейся в получении, при необходимости, возможности одновременной связи одного из объектов с двумя другими.
ЛИТЕРАТУРА
1. Журнал "Tsushin sogo kenkyujo kiho" = Rev.Commun. Res.Lab., Япония, - 1994, 40, N 2, с.107-110, 117-124, 153-179.
2. Реферативный журнал ВИНИТИ, 29, "Связь", сводный том N 5, 1995, рефераты: 5Б107, 5Б128, 5Б130, 5Б131.
3. Реферативный журнал ВИНИТИ, 29, "Связь", сводный том N 4, 1994, реферат 4В204.
4. Alignment acquiring, optical beam communication link. Патент США N 5060304, 1991.
5. Method and apparatus for automatic acqusition and alignment of an optical beam communication link. Патент США N 5142400, 1992.
6. Optical space communication apparatus. Патент США N 5264955, 1993.
7. Dispositif de liason optique pour mobile, notamment pour satellite de la terre. Заявка Франции N 9205751, 1992.
8. Журнал "Радио", Россия. N 2, 1994, с.2,3,42.
9. Лазерная космическая связь, под ред. М.Кацмана. - М.: Радио и связь, 1993, с.152-154,188.
Изобретение относится к технике космической оптической связи. Решается задача обеспечения непрерывной оптической связи между двумя объектами, один из которых или оба вращаются вокруг своих центров масс, с одновременным повышением надежности и обеспечением функциональной гибкости космической оптической линии связи (КОЛС). КОЛС содержит размещенную на каждом объекте приемопередающую аппаратуру (ППА) с ОА. Оконечный оптический узел (ООУ) ОА установлен на опоре, состоящей из поворотного (ПУ) и неподвижного узлов (НУ), причем ПУ выполнен с возможностью разворотон относительно него ООУ вокруг поперечной оси ООУ и разворотов ПУ относительно НУ, жестко закрепленного посадочной поверхностью на корпусе объекта. В КОЛС введена на каждом вращающемся объекте вторая ОА с ООУ, посадочные поверхности ПУ опор первой и второй ОА на одном объекте обращены друг к другу, оси разворотов ООУ антенн перекрещиваются с осями разворотов ПУ, оси разворотов ПУ опор первой и второй ОА на объекте тоже перекрещиваются, а диапазон перекрытия углов разворотов ПУ относительно НУ определяется по расчетной зависимости. 1 з.п. ф-лы, 6 ил.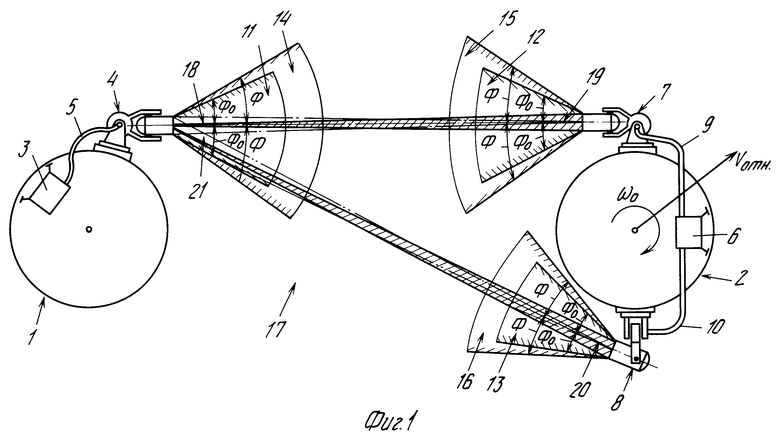
180o + 2 arcsin/sin(A/2/sin B.
| Лазерная космическая связь под ред | |||
| М.Кацмана | |||
| - М.: Радио и связь, 1993, с.152-154, с | |||
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
