Заявляемое изобретение относится к учебным тренажерам боевых расчетов (БР) зенитно-ракетного комплекса (ЗРК) и может быть использовано в качестве учебного тренажера для обучения БР самоходной огневой установки (СОУ), входящей в ЗРК.
Известна тренажерная система по патенту на полезную модель RU № 7229, приоритет 21.08.1997, МПК: G09B 9/08, которая содержит рабочую станцию, с присоединенными к ней одним или несколькими вычислительными средствами управления радиолокационными станциями, каждое из которых связано с одной или несколькими радиолокационными системами, при этом в неё включены и подсоединены к рабочей станции один или несколько сетевых серверов, к каждому из которых подсоединено одно или несколько автоматизированных рабочих мест.
Недостатком этой тренажерной системы является отображение органов управления на экране дисплея, что не позволяет максимально приблизить условия тренировки к реальным условиям.
Известен тренажер для подготовки расчетов комплекса управляемого вооружения по патенту на изобретение RU № 2328692, приоритет 13.11.2006, МПК: F41G 7/00, который содержит рабочие места оператора, командира и инструктора, устройство переговорной связи и аппаратно-программный комплекс для управления процессом обучения, при этом он выполнен в виде нескольких рабочих модулей, каждый из которых содержит рабочие места оператора и командира, а рабочее место инструктора выполнено в виде отдельного модуля, соединенного с устройством для имитации оперативной обстановки, при этом рабочие модули связаны между собой и с модулем инструктора и содержат пульт оператора, пульт командира и аппаратно-программный комплекс, при этом пульт оператора состоит из видеомонитора, и узла переговорной связи, пульт командира выполнен в виде видеомонитора, и аппаратно-программного комплекса, модуль инструктора состоит из аппаратно-программного комплекса, видеомонитора, клавиатуры, координатно-указательного устройства и блока переговорной связи, при этом аппаратно-программный комплекс выполнен в виде двух ПЭВМ.
Недостатком этого тренажера является использование имитаторов органов управления и наведения в пультах командира и операторов, что не позволяет максимально приблизить условия тренировки к реальным условиям.
Наиболее близким из известных технических решений является автономный тренажер боевых расчетов зенитно-ракетных систем, по патенту на полезную модель № 126497, приоритет 02.10.2012, МПК: G09B 9/08, который содержит связанные между собой цифровой сетью Ethernet рабочее место (РМ) руководителя тренировки, РМ командира БМ ЗРС, не менее одного РМ оператора и управляющую ЭВМ, предназначенную для имитации сигналов воздушных целей и помех, моделирования алгоритмов функционирования БМ ЗРС, оценки действий БР БМ по отражению воздушного противника, штатное видеоприемное устройство тепловых сигналов БМ ЗРС, соединенное с сигнальным выходом управляющей ЭВМ, оснащенные блоками с реальными органами индикации и управления, соединенными через универсальные адаптеры с ЭВМ.
Недостатком известного тренажера является невозможность его использования для обучения БР самоходной огневой установки (СОУ), поскольку известный тренажер предназначен для обучения БР ЗРС типа «Тор»; подключения и работы с тренажером командного пункта (КП); не предусмотрена возможность речевой связи, как между членами обучаемого БР, так и с тренажером КП.
Технической проблемой, на решение которой направлено изобретение является расширение функциональных возможностей учебного тренажера боевых расчетов зенитно-ракетного комплекса.
Технический результат заключается в обеспечении возможности обучения боевых расчетов самоходной огневой установки ЗРК как в составе комплексного тренажера ЗРК, так и автономно, с соблюдением условий приближенности к условиям боевой работы.
Указанный технический результат достигается тем, что учебный тренажёр боевых расчётов зенитно-ракетного комплекса (ЗРК), содержащий связанные между собой цифровой сетью Ethernet рабочее место (РМ) инструктора, РМ командира боевой машины (БМ) ЗРК, не менее одного РМ оператора БМ ЗРК, электронно-вычислительную машину (ЭВМ) для анализа действий экипажа и формирования отчетов и ЭВМ инструктора для формирования заданий на обучение, имитации сигналов воздушных целей, местных предметов и помех, дополнительно содержит имитатор вращающейся платформы, связанный с РМ командира, и имитатор оптико-электронной системы, соединённые посредством сети Ethernet с управляющей ЭВМ, служащей для имитации работы аппаратуры радиолокационной станции (РЛС) и пусковой установки (ПУ), а РМ командира и РМ оператора БМ дополнительно оснащены штатными блоками управления, соединенными через универсальные адаптеры с управляющей ЭВМ и штатными блоками ввода, соединёнными с блоками вычислительными, кроме того тренажёр оборудован панелью проводной связи, соединенной с ЭВМ инструктора посредством сети Ethernet, а по проводной линии связи с аппаратурой голосовой связи, и имеющей выходы проводной связи и сети Ethernet для подключения к комплексному тренажёру ЗРК, и выполнен с возможностью работы как в режиме автономной, так и в режиме комплексной тренировки в составе комплексного тренажёра ЗРК.
Имитатор оптико-электронной системы содержит видеомонитор, пульт управления, ЭВМ имитации оптико-электронной системы.
Блоки управления РМ командира представлены блоком управления ПУ, блоком управления аппаратурой РЛС, блоком контроля центральной вычислительной системы.
Под штатными устройствами понимаются устройства, полностью выполненные по конструкторской документации соответствующей технологической документации боевых машин, которые используются в процессе эксплуатации.
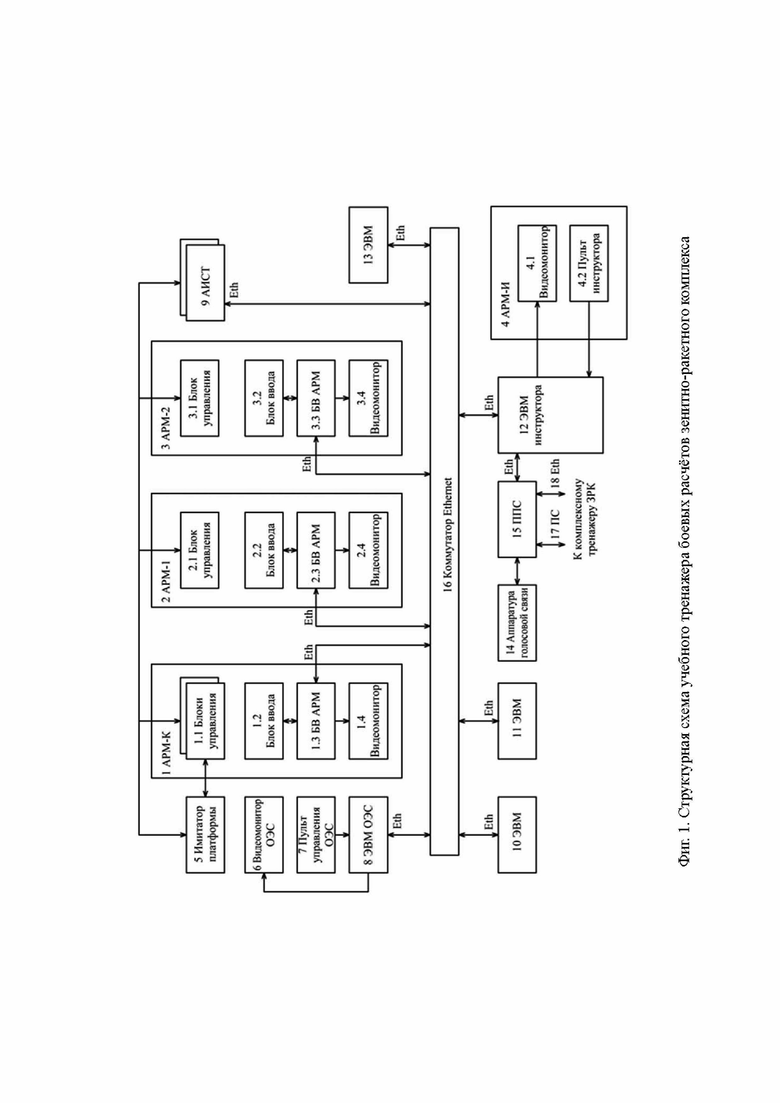
На фиг. 1 представлена структурная схема учебного тренажера боевых расчётов зенитно-ракетного комплекса.
Учебный тренажер содержит автоматизированное рабочее место 1 командира (АРМ-К) СОУ; автоматизированные рабочие места 2, 3, соответственно, первого оператора (АРМ-1) и второго оператора (АРМ-2); автоматизированное рабочее место 4 инструктора тренажера (АРМ-И); имитатор 5 вращающейся платформы; имитатор оптико-электронной системы (ОЭС), который состоит из штатного видеомонитора 6, штатного пульта 7 управления ОЭС и электронно-вычислительной машины (ЭВМ) 8 имитации ОЭС; адаптеры 9 информационной сети тренажера (АИСТ); ЭВМ 10 обмена с АИСТ 9; ЭВМ 11 для анализа действий экипажа и формирования отчетов; ЭВМ 12 инструктора для формирования заданий на обучение, имитации сигналов воздушных целей, местных предметов и помех; управляющую ЭВМ 13 для имитации работы аппаратуры радиолокационной станции (РЛС) и пусковой установки (ПУ), использующую штатное ПО; штатную аппаратуру 14 голосовой связи; панель 15 проводной связи (ППС); коммутатор 16 сети Ethernet.
Панель 15 проводной связи представляет собой коммутационную панель с элементами для подключения линий связи.
Управляющая ЭВМ 13, АИСТ 9, ЭВМ 10 обеспечивают имитацию работы центральной вычислительной системы (ЦВС) СОУ.
Видеомонитор 6 ОЭС и пульт 7 управления ОЭС соединены с ЭВМ 8 имитации ОЭС СОУ.
АРМ-К 1 содержит штатные блоки 1.1 управления, соединенные с имитатором 5 вращающейся платформы и АИСТ 9, штатный блок 1.2 ввода, штатный блок 1.3 вычислительный (БВ), соединённый со штатным видеомонитором 1.4. Штатные блоки 1.1 управления представляют собой блок управления ПУ, блок управления аппаратурой РЛС, блок контроля ЦВС и служат для управления имитатором 5 вращающейся платформы и аппаратурой РЛС, ПУ, имитируемыми управляющей ЭВМ 13.
АРМ-1 2 содержит штатный блок 2.1 управления, соединенный с АИСТ 9, штатный блок 2.2 ввода, штатный БВ 2.3, соединённый со штатным видеомонитором 2.4. Блок 2.1 управления служит для управления режимами работы РЛС, наземным радиолокационным запросчиком (НРЗ) и манипулятором захвата цели.
АРМ-2 3 содержит штатный блок 3.1 управления, соединённый с АИСТ 9, штатный блок 3.2 ввода, штатный БВ 3.3, соединённый со штатным видеомонитором 3.4. Блок 3.1 управления служит для управления режимами ОЭС и манипулятором захвата цели ОЭС.
Блоки 1.2, 2.2 и 3.2 ввода служат для управления режимами работы РЛС, имитируемой управляющей ЭВМ 13.
БВ 1.3, 2.3, 3.3 предназначены для обработки принимаемой информации, формирования изображения на видеомониторах 1.4, 2.4, 3.4, осуществления информационного обмена по различным линиям связи между АРМ-К 1, АРМ-1 2, АРМ-2 3, АРМ-И 4.
АРМ-И 4 содержит видеомонитор 4.1 и пульт инструктора 4.2 с клавиатурой и манипулятором, соединенные с ЭВМ 12 инструктора.
ЭВМ 8 имитации ОЭС, АИСТ 9, ЭВМ 10 обмена с АИСТ 9, ЭВМ 11, ЭВМ 12 инструктора, управляющая ЭВМ 13, БВ АРМ 1.3, 2.3 и 3.3 подключены к коммутатору Ethernet 16 и связаны между собой в цифровую информационную сеть Ethernet.
Панель 15 проводной связи соединена с ЭВМ 12 инструктора посредством сети Ethernet, а по проводной линии связи, представляющей собой двухпроводную линию телефонной связи, подключена к аппаратуре 14 голосовой связи. На панели 15 проводной связи выполнены выход 17 проводной связи (ПС) и выход 18 сети Ethernet для подключения к комплексному тренажеру ЗРК (на схеме не показан).
АИСТ 9 предназначены для преобразования выходных сигналов с блоков 1.1, 2.1, 3.1 управления и имитатора 5 вращающейся платформы в цифровую форму и передачи их по сети Ethernet на ЭВМ 10 для функционального программного обеспечения (ФПО) тренажера. А также для приёма по сети Ethernet от ЭВМ 10 управляющих цифровых команд, преобразования их и передачи на входы блоков 1.1, 2.1, 3.1 управления и имитатора 5 вращающейся платформы.
Имитатор 5 вращающейся платформы предназначен для имитации сигналов приводов платформы и лафета ПУ СОУ и управления индикаторами положения платформы на АРМ-К 1.
Учебный тренажер боевых расчетов ЗРС работает следующим образом.
Работа на тренажере может проводиться в двух режимах: автономная тренировка и комплексная тренировка в составе комплексного учебного тренажера ЗРК.
В режиме автономной тренировки после включения аппаратуры учебного тренажера, инструктор со своего АРМ-И 4 подготавливает задание на тренировку. Боевой расчет занимает свои рабочие места АРМ-К 1, АРМ-1 2 и АРМ-2 3. Инструктор с пульта 4.2 инструктора задает на ЭВМ 12 программу тренировки: вид воздушного налета, траекторию движения, метеообстановку, боезапас ракет и другие параметры средств нападения и средств обороны БМ ЗРС и запускает выполнение задания на обучение. С ЭВМ 12 потоки данных о воздушных целях, местных предметах и помехах в цифровой форме по сети Ethernet через коммутатор 16 попадают на управляющую ЭВМ 13. В управляющей ЭВМ 13 данные обрабатываются имитатором РЛС, из них формируются данные для отображения воздушной обстановки и по сети Ethernet через коммутатор 16 попадают на БВ 1.3, 2.3 и 3.3, а с них, соответственно, на видеомониторы 1.4, 2.4, 3.4.
Командир выводит ПУ по центру сектора ответственности (СО), вращая штурвал на блоке 1.1 управления ПУ.
Управляющий сигнал с блока 1.1 управления ПУ поступает на имитатор платформы 5, где вырабатывается напряжение, пропорциональное углу поворота штурвала. Это напряжение поступает на АИСТ 9, где преобразуется в цифровую форму, и по сети Ethernet через коммутатор 16 поступает на ЭВМ 10.
ЭВМ 10 упаковывает данные и по сети Ethernet через коммутатор 16 передает их на управляющую ЭВМ 13. В управляющей ЭВМ 13 данные обрабатываются имитатором ПУ, из них формируются данные, для отображения метки СО, затем по сети Ethernet через коммутатор 16 попадают на БВ 1.3, а с нее на видеомонитор 1.4 АРМ-К 1.
С помощью блоков 1.2, 2.2, 3.2 ввода боевой расчет устанавливает требуемые режимы работы РЛС.
Командир с АРМ-К 1 оценивает воздушную обстановку на экране 1.4 видеомонитора и с блока 1.1 командира выдает целеуказание первому оператору на АРМ-1 2 на захват и сопровождение цели.
Первый оператор с АРМ-1 2 с блока 2.2 ввода производит запрос на опознавание цели. По ответному, имитируемому на ЭВМ 12, сигналу цели, управляющая ЭВМ 13 формирует отметку принадлежности цели к определенному классу и по сети Ethernet через коммутатор 16 передает данные на БВ 1.3 и 2.3, а с них на видеомониторы 1.4 и 2.4.
С блока 2.1 управления первый оператор с АРМ-1 2 выдает команды на захват и автоматическое сопровождение опасной цели. При наличии помех, делающих невозможным автоматическое сопровождение цели, второй оператор с АРМ-2 3 с блока 3.2 ввода производит ручной захват и сопровождение цели.
Командир на видеомониторе 1.4 контролирует класс целей, параметры сопровождаемой цели. При входе сопровождаемой цели в зону поражения, командир с блока 1.1 командира дает команду на пуск ракет.
В управляющей ЭВМ 13 данные обрабатываются имитатором ПУ и выдается команда на индикацию схода ракет на АРМ-К 1. Управляющая ЭВМ 13 имитирует попадание ракеты в цель с заданной вероятностью и прекращает формирование отметки цели в случае ее уничтожения.
При работе в режиме «ОЭС» второй оператор с АРМ-2 3 с пульта 7 управления ОЭС дает команду на включение ОЭС. ЭВМ 4 ОЭС имитирует включение системы ОЭС и формирует изображение окружающей обстановки и служебной информации на видеомониторе 6 ОЭС.
После захвата цели на автосопровождение, командир с АРМ-К 1 дает команду второму оператору на АРМ-2 3 на выполнение захвата цели системой ОЭС. При помощи пульта 7 управления ОЭС и блока 3.1 управления второй оператор выполняет захват цели системой ОЭС.
ЭВМ 4 ОЭС имитирует захват цели и формирует изображение окружающей обстановки и цели на видеомониторе 6 ОЭС. После этого первый оператор с АРМ-1 2 по указанию командира с блока 2.2 ввода дает команду на отключение излучения передатчика РЛС, и далее ЭВМ 8 ОЭС имитирует сопровождение цели и отображает ее на видеомониторе 6 ОЭС.
При вхождении цели в зону поражения, командир с блока 1.1 командира дает команду на пуск ракет.
В управляющей ЭВМ 13 данные обрабатываются имитатором ПУ и выдается команда на индикацию схода ракет на АРМ-К 1. ЭВМ 8 ОЭС имитирует движение цели и ее подрыв при попадании ракеты.
В режиме автономной тренировки обучаемый БР СОУ выполняет учебные задания без взаимодействия с комплексным учебным тренажером ЗРК, при этом имитация взаимодействия с боевыми средствами ЗРК обеспечивается встроенным программным имитатором на ЭВМ 12.
Речевая связь во время тренировки БР СОУ между командиром, операторами и инструктором осуществляется с помощью аппаратуры 14 голосовой связи.
В режиме комплексной тренировки учебный тренажер соединяется с комплексным тренажером ЗРК линиями связи, подключаемыми к выходам 17, 18, соответственно, ПС и сети Ethernet.
Задание на тренировку, параметры воздушной обстановки и команда на начало тренировки поступают по сети Ethernet через выход 18 с АРМ инструктора комплексного тренажера (не показано). Во время тренировки по сети Ethernet через выход 18 производится обмен информацией с другими тренажерами боевых средств (не показаны) и АРМ инструктора комплексного тренажера.
Обучаемый БР СОУ проводит боевую работу по имитируемым целям единой для комплексного тренажера воздушной обстановки.
Речевая связь тренируемого БР СОУ между собой, инструктором тренажера осуществляется с помощью аппаратуры 14 голосовой связи, а через ППС 15 и выход 17 ПС с обучаемыми экипажами других боевых средств.
Режимы тренировок на предложенном тренажёре не ограничиваются выше приведенными примерами. Данное изобретение предусматривает и другие режимы тренировок, которые не выходят за пределы описания и формулы изобретения.
С помощью ЭВМ 11 ведется запись действий боевого расчета по целям, оценивается величина промаха ракет, реакция боевого расчета, своевременность принятия решений, оценивается качество боевой работы и степень профессионализма боевого расчета, по окончании тренировки формируется отчет с выставлением оценки выполнения задания. В режиме комплексной тренировки отчет о тренировке по сети Ethernet через выход 18 передается на АРМ инструктора комплексного тренажера.
Процесс обучения повторяется до достижения требуемого уровня профессионализма БР.
Использование в составе АРМ 1, 2, 3 штатных блоков 1.1, 2.1, 3.1 управления, штатных блоков 1.2, 2.2, 3.2 ввода, штатных БВ 1.3, 2.3, 3.3, а в тренажёре - штатного видеомонитора 6 с пультом управления 7 оптико-электронной системы, аппаратуры 14 голосовой связи, штатного программного обеспечения в управляющей ЭВМ 13, обеспечивает приближение условий тренировки к реальной боевой работе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ ТРЕНАЖЕР КОМАНДНОГО ПУНКТА | 2022 |
|
RU2795343C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 2014 |
|
RU2547955C1 |
| УЧЕБНЫЙ ТРЕНАЖЕР БОЕВЫХ РАСЧЕТОВ ЗЕНИТНОЙ РАКЕТНОЙ СИСТЕМЫ | 2018 |
|
RU2701427C1 |
| Тренажер для подготовки боевых расчетов станции обнаружения целей | 2022 |
|
RU2783557C1 |
| Комплексная тренажерная система для подготовки специалистов противовоздушной обороны | 2017 |
|
RU2666039C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ РАСЧЕТОВ ПУНКТОВ УПРАВЛЕНИЯ ЗЕНИТНЫХ РАКЕТНО-ПУШЕЧНЫХ КОМПЛЕКСОВ | 2013 |
|
RU2544861C1 |
| Пункт управления занятиями по подготовке боевых расчетов зенитного ракетного комплекса | 2017 |
|
RU2662379C1 |
| ТРЕНАЖЕР РАСЧЕТА ПОДВИЖНОГО НАЗЕМНОГО РАКЕТНОГО КОМПЛЕКСА | 2020 |
|
RU2730274C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ РАСЧЕТОВ КОМПЛЕКСА УПРАВЛЯЕМОГО ВООРУЖЕНИЯ | 2006 |
|
RU2328692C1 |
| Тренажер для подготовки боевых расчетов батарейных и полковых пунктов управления зенитных ракетно-пушечных комплексов | 2016 |
|
RU2648543C1 |
Изобретение относится к учебным тренажерам боевых расчетов (БР) зенитно-ракетных комплексов (ЗРК) и может быть использовано в качестве учебного тренажера для обучения БР самоходной огневой установки (СОУ), входящей в ЗРК. Учебный тренажёр БР ЗРК содержит рабочее место (РМ) инструктора, РМ командира боевой машины (БМ) ЗРС, РМ оператора БМ ЗРС, имитатор вращающейся платформы, связанный с РМ командира, и имитатор оптико-электронной системы, соединённые посредством сети с управляющей ЭВМ, служащей для имитации работы аппаратуры радиолокационной станции (РЛС) и пусковой установки (ПУ). РМ командира и РМ оператора БМ дополнительно оснащены штатными блоками управления, соединенными с управляющей ЭВМ и штатными блоками ввода, соединёнными с блоками вычислительными. Кроме этого тренажёр оборудован панелью проводной связи, соединенной с ЭВМ инструктора и с аппаратурой голосовой связи и имеющей выходы проводной связи и сети Ethernet для подключения к комплексному тренажёру ЗРК. Обеспечивается возможность обучения БР самоходной огневой установки ЗРК как в составе комплексного тренажера ЗРК, так и автономно, с соблюдением условий приближенности к условиям боевой работы. 2 з.п. ф-лы, 1 ил.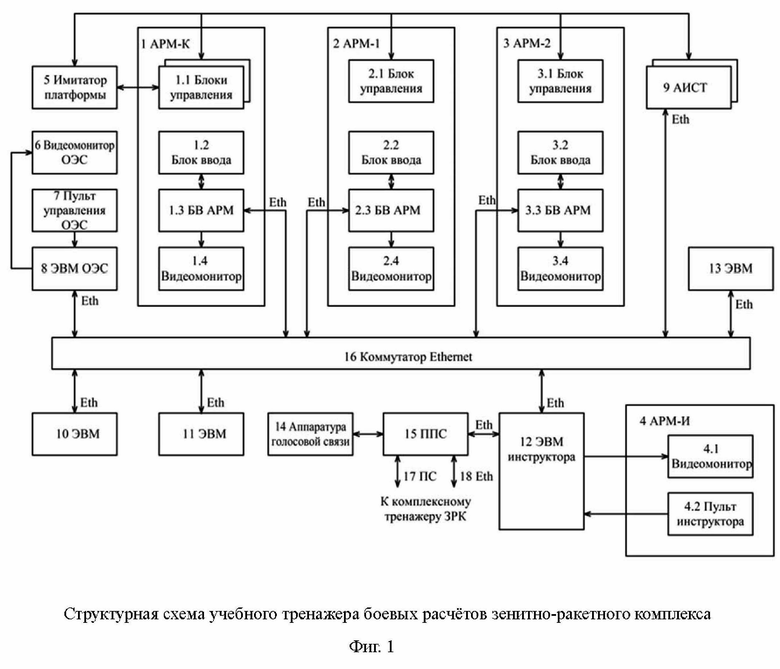
1. Учебный тренажёр боевых расчётов зенитно-ракетного комплекса (ЗРК), содержащий связанные между собой цифровой сетью Ethernet рабочее место (РМ) инструктора, РМ командира боевой машины (БМ) ЗРС, не менее одного РМ оператора БМ ЗРС, электронно-вычислительную машину (ЭВМ) для анализа действий экипажа и формирования отчетов и ЭВМ инструктора для формирования заданий на обучение, имитации сигналов воздушных целей, местных предметов и помех, отличающийся тем, что дополнительно содержит имитатор вращающейся платформы, связанный с РМ командира, и имитатор оптико-электронной системы, соединённые посредством сети Ethernet с управляющей ЭВМ, служащей для имитации работы аппаратуры радиолокационной станции (РЛС) и пусковой установки (ПУ), а РМ командира и РМ оператора БМ дополнительно оснащены штатными блоками управления, соединенными через универсальные адаптеры с управляющей ЭВМ и штатными блоками ввода, соединёнными с блоками вычислительными, кроме того, тренажёр оборудован панелью проводной связи, соединенной с ЭВМ инструктора посредством сети Ethernet, а по проводной линии связи с аппаратурой голосовой связи, и имеющей выходы проводной связи и сети Ethernet для подключения к комплексному тренажёру ЗРК, и выполнен с возможностью работы как в режиме автономной, так и в режиме комплексной тренировки в составе комплексного тренажёра ЗРК.
2. Учебный тренажёр боевых расчётов зенитно-ракетной системы по п.1, отличающийся тем, что имитатор оптико-электронной системы содержит штатный видеомонитор, пульт управления, ЭВМ имитации оптико-электронной системы.
3. Учебный тренажёр боевых расчётов зенитно-ракетной системы по п.1, отличающийся тем, что блоки управления РМ командира представлены блоком управления ПУ, блоком управления аппаратурой РЛС, блоком контроля центральной вычислительной системы.
| Способ получения 2-метокси-6, 9-дихлор-7-нитроакридина | 1959 |
|
SU126497A1 |
| Прибор для автоматической регистрации характеристик газоразрядных счетчиков ядерных излучений | 1961 |
|
SU146886A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| KR 101962226 B, 26.03.2019. | |||

