Изобретение относится к фотограмметрии, а именно к способам топографической съемки местности с помощью фотографирования и может использоваться для построения трехмерных цифровых моделей местности на основе снимков с неметрических камер и расчета на основе полученных моделей объема сыпучих продуктов, находящихся на закрытых складах.
Из уровня техники известен способ фотограмметрии ледового поля в ледовом бассейне (RU2695596C1, МПК G01C 11/00, G01C 3/08, опубл. 24.07.2019), включающий последовательное формирование структурированной подсветки ледового поля, регистрацию изображений ледового поля с искаженной структурированной подсветкой, вычисление величины фактора искажения структурированной подсветки, при этом структурированную подсветку формируют в виде параллельных световых линий посредством двух лазерных нивелиров, жестко закрепленных на опоре, установленной над ледовым полем с возможностью перемещения вдоль бассейна, регистрируют перспективные искажения структурированной подсветки посредством закрепленного с возможностью перемещения над ледовым полем устройства фотофиксации, выбор места расположения которого обеспечивает наличие на каждом изображении двух световых линий и края опоры, после чего вычисляют величину фактора искажения в виде угла отклонения оптической оси устройства фотофиксации от горизонтали.
Недостатком известного технического решения является сложность его адаптации для решения задачи измерения объема сыпучих материалов, хранящихся на закрытых складах.
Наиболее близким к заявленному изобретению техническим решением и выбранным в качестве прототипа признан способ измерения объемов сыпучих материалов на открытых складах с применением воздушного оптического сканирования с беспилотных авиационных комплексов (RU2646538C1, МПК G01C 11/00, опубл. 05.03.2018). Способ включает в себя следующие основные этапы: получение высокоточных геодезических измерений характерных точек границ сыпучих материалов и опознавательных знаков; получение данных оптического сканирования с беспилотной авиационной системы в виде аэрофотоснимков сыпучего материала; получение результатов геодезических измерений от базовой станции за период проведения аэрофотосъемки; получение результатов совместной обработки измерений от базовой станции и от бортового приемника спутниковой системы навигации (GNNS-приемника), что позволяет получить центры фотографирования; фотограмметрическая обработка данных оптического сканирования и проверка их точности посредством сравнения координат опознавательных знаков, определенных на аэрофотоснимках, с координатами опознавательных знаков, определенными геодезическими измерениями; построение на основе полученных данных высокоточного ортофотоплана сыпучих материалов, карты высот и 3D-модели и определение объема сыпучих материалов.
Недостатком известного способа измерения объемов сыпучих материалов является то, что он предназначен для применения на открытых складах, а его адаптация для использования в условиях закрытых складских помещений является затруднительной, вследствие применения для фотосьемки беспилотного авиационного комплекса, что также усложняет способ, делая необходимым для его осуществления привлечение опытного оператора для проведения сьемки.
Технической задачей, на решение которой направлено заявленное изобретение, является повышение точности измерения объема сыпучих продуктов, находящихся на закрытых складах, с одновременным упрощением способа измерения.
Указанная задача решена тем, что фотограмметрический способ определения объема насыпи в закрытых складах полезного ископаемого включает в себя подготовительный, полевой и камеральный этапы. На подготовительном этапе выполняют определение необходимого количества статичных камер с учетом требований к проценту поперечного и продольного перекрытия кадров, закрепляют камеры над измеряемой насыпью, подключают их к сети Ethernet и размещают на полу склада опознавательные знаки, при этом камеры и опознавательные знаки координируют с помощью геодезического оборудования в условной системе координат, связанной со стенами склада. На полевом этапе осуществляют одновременную сьемку насыпи всеми камерами и передачу фотографий по сети Ethernet удаленной автоматизированной системе обработки изображений. На камеральном этапе снимкам присваивают координату фотографирования, далее с помощью упомянутой системы последовательно осуществляют совмещение и предварительное выравнивание полученных фотографий, расстановку и совмещение опорных точек с опознавательными знаками с указанием их координат, уточнение координат камер, генерацию плотного облака точек и построение карты высот на его основе. Далее осуществляют распознавание контура основания насыпи, нарушений бортов, точек пола и сторонних объектов, синтез контура из изолиний и трехмерной полигональной модели насыпи с последующей интерполяцией модели и определением объема насыпи.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков способа, является повышение точности измерения объема сыпучих продуктов, находящихся на закрытых складах, за счет применения статичных камер и опознавательных знаков, координируемых с помощью геодезического оборудования, а также автоматизированной системы, выполненной с возможностью выравнивания фотографий, полученных от камер, распознавания контура основания насыпи и синтеза трехмерной модели насыпи. Применение оборудования в виде статических камер позволяет также значительно упростить способ измерения объема сыпучих продуктов и снизить трудоемкость его осуществления.
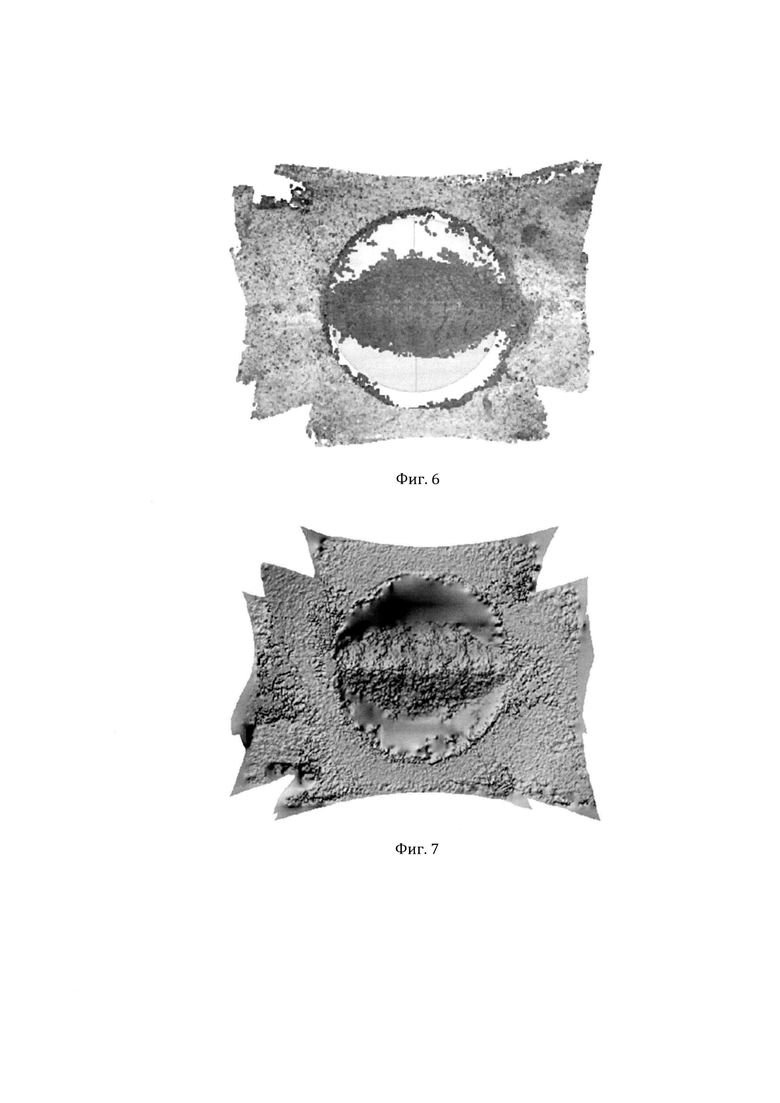
Способ поясняется чертежами, где на фиг. 1 показана схема расположения камер и опознавательных знаков (вид сверху); на фиг. 1 показана схема расположения камер (вид сбоку); на фиг. 3, 4, 5 показаны фотографии первой, второй и третьей конфигурации насыпи; на фиг. 6 приведен пример плотного облака точек; на фиг. 7 приведен пример синтезированной карты высот; на фиг. 8, 9, 10, 11, 12 и 13 приведены изолинии и трехмерные полигональные модели насыпи первой, второй и третьей конфигурации, интерполированные методом крикинга; на фиг. 14, 15, 16, 17, 18 и 19 приведены изолинии и трехмерные полигональные модели насыпи первой, второй и третьей конфигурации, интерполированные методом радиальных базисных функций.
Осуществление фотограмметрического способа определения объема насыпи в закрытых складах приведем на примере исследования насыпи, расположенной в закрытом складе, занимающей в длину 30 м и в ширину 36 м, при этом высота балок, на которых установлен подвижный насыпной конвейер, составляет 17,5 м.
На подготовительном этапе камеры, в соответствии с известными рекомендациями1 (1Руководство пользователя Agisoft Metashape // Agisoft.com URL: https://www.agisoft.com/pdf/metashape-pro 1_5_ru.pdf (дата обращения: 19.03.2021]), камеры необходимо разместить равномерно над площадью, занимаемой исследуемой насыпью, а их число выбрать исходя из требований к перекрытию кадров: 50% поперечное перекрытие и 50% продольное перекрытие. В соответствии с этим требованием на упомянутых балках были закреплены 6 камер (1), а для более точной географической привязки модели на полу склада размещены 4 опознавательных знака (наземных опорных точки Ground Control Points - GCP) (2), выполненных в виде контрастных координатных меток. После установки камер (1) и расположения опознавательных знаков (2) камеры, и опознавательные знаки были координированы с помощью геодезического оборудования в условной системе координат, связанной со стенами склада (3, 4), оси которой направлены вдоль стен.
В качестве камер были применены неметрические бытовые камеры с КМОП-матрицей (например, с матрицей модели IMX335) и светочувствительностью 0.001 лк, характеристики которых приведены в таблице 1. В качестве геодезического оборудования для координирования камер и опознавательных знаков применялся тахеометр Leica TS06plus.

Для проверки возможности использования камер с указанными характеристиками был проведен замер освещенности, в результате которого было принято решение об установке в зону сьемки двух осветительных прожектора.
Камеры (1) были подключены к сети Ethernet склада по проводному или беспроводному (Wi-Fi) каналу связи для обеспечения возможности передачи фотографий удаленной автоматизированной системе, выполненной с возможностью обработки и распознавания изображений, на основе специализированного компьютера, содержащего центральный процессор Intel Core i7 или AMD Ryzen 7, дискретную видеокарту NVIDIA и 32 Гб оперативной памяти. Для обеспечения более высокопроизводительной обработки изображений в качестве видеокарты специализированного компьютера применялась модель GeForce RTX 2080 Ti, содержащая 2944 скалярных процессоров (ядер CUDA).
Для обеспечения буферизации данных и ускорения их передачи камеры (1) могут быть подключены к сети Ethernet не напрямую, а через специализированные узлы промежуточного хранения данных, каждый из которых представляет собой микропроцессорную систему на основе микроконтроллера, выполненного на ядре ARM7TDMI-S, работающего на частоте 72 МГц, содержащего микропроцессорное ядро, соединенное с помощью системной шины с FLASH-памятью программ, SRAM-памятью данных, USB-контроллером, Ethernet-контроллером и модулем подключения SD-карты, в который вставлена и электрически соединена с модулем SD-карта (на фигурах структурная схема узла не показана). При этом каждую из камер (1) подключают к USB-контроллеру узла промежуточного хранения данных, а Ethernet-контроллер узла подключают к сети Ethernet склада.
На полевом этапе выполнялась одновременная площадная плановая сьемка насыпи всеми камерами и передача фотографий по сети Ethernet удаленной автоматизированной системе обработки изображений. При этом сьемка производилась при отвесном (в пределах 3 градусов) положении оптической оси камер. В описываемом исследовании проводилось измерение трех конфигураций насыпи:
• первая конфигурация - насыпь не нарушена (фиг. 3);
• вторая конфигурация - часть объема вывезена с помощью подпольного конвейера (фиг. 4);
• третья конфигурация - центральная часть насыпи полностью вывезена, остались только боковые борта (фиг. 5).
Камеральный этап работ осуществлялся с помощью автоматизированной системы обработки изображений с использованием следующего специализированного программного обеспечения:
• GeoSetter - программа обеспечивает осуществление привязки к полученным на полевом этапе снимкам GPS-координат;
• Agisoft Metashape - программа, позволяющая реконструировать 3D-модель на основе фотографий, снятых любыми цифровыми фотокамерами с любых ракурсов (при условии, что каждый элемент реконструируемой сцены виден, по крайней мере, с двух позиций съемки);
• Surfer - программа предназначена для моделирования и структурного анализа поверхностей, поддерживает импорт файлов в формате «*.DEM» (USGS Digital Elevation Models), обеспечивает визуализацию поверхностей с применением координатных точек с возможностью отображения и совмещения плоских векторных и трехмерных графических слоев.
Первоначально фотографии, полученные от камер (1), загружались в программу GeoSetter, затем к ним осуществлялась привязка геоданных камер в условной системе координат, связанной со стенами склада, полученных на предварительном этапе и представленных в виде текстового файла в формате «*.txt» (таблица 2).

Далее фотографии с геопривязкой загружались в программу Agisoft Metashape, после чего выполнялось их выравнивание, выполняемое в автоматическом режиме на основе нахождения общих точек снимков, на основе известных алгоритмов2 (2Ивашечкин, А.П. Методы нахождения особых точек изображения и их дескрипторов / А.П. Ивашечкин, А.Ю. Василенко, Б.Д. Гончаров. - Текст: непосредственный // Молодой ученый. - 2016. - №15 (119). - С. 138-140. - URL: https://moiuch.ru/archive/119/33106/ (дата обращения: 23.03.2021)), с определением всех параметров камер: положение, ориентация, внутренняя геометрия (фокусное расстояние, и параметры дисторсии). Результатом обработки являются разреженное облако общих точек в 3D-пространстве модели и данные о положении и ориентации камер, при этом рекомендуемое число проекций в облаке составляет 4000 при максимальном количестве точек равном 40000. Данные о положении и ориентации камер используется на дальнейших стадиях обработки.
После предварительного выравнивания производилась расстановка маркеров на опознавательные знаки (2) - это необходимо для оптимизации результатов расчета положения камер и их параметров внутреннего ориентирования. Процедура оптимизации выравнивания камер применяется для повышения точности расчета параметров внутреннего и внешнего ориентирования камер, а также для коррекции возможной дисторсии.
Основываясь на рассчитанных положениях фотографий программа Agisoft Metashape строит карты глубины для каждой из них и автоматически формирует плотное облако точек (фиг. 6), содержащее, по крайней мере, 100×106 точек (конкретное значение зависит от настроек), которое может быть отредактировано и классифицировано при помощи программы, а также использовано для построения полигональной модели, тайловой модели или карты высот (фиг. 7), представляющей собой модель поверхности в виде регулярной сетки значений. На карте высот выполнялось автоматизированное распознание образа насыпи, осуществлявшееся плотной сеткой из точечных объектов для получения максимального объема модельных данных.
На фиг. 6 видно, что облако точек корректно и плотно сформировано на участках, где есть нарушения насыпи, однако в местах монолитных бортов фрагменты насыпи не были распознаны, что связано со слишком контрастными оттенками объектов: черные и белые объекты плохо распознаются фотограмметрическими программами. В связи с этим, для получения значений точек в «просветах», использовалась программа Surfer для построения полигональной модели ее интерполяции методами крикинга и радиальных базисных функций, а также расчета объема насыпи. Входными данными для программы Surfer являются координаты упомянутых выше точечных объектов, сохраненных в текстовом файле.
Программа Surfer рассчитывает объемы на основании двух сеточных поверхностей, первая из которых является моделью насыпи, а вторая является моделью пола. Объем, заключенный между двумя поверхностями, может быть рассчитан с помощью трех известных методов численного интегрирования: метода трапеций, метода Симпсона (также Ньютона-Симпсона) и метода 3/8 Симпсона.
Результаты расчета объемов для каждой из трех конфигураций представлены в таблицах 3, 4 и 5 соответственно.



Изолинии и трехмерные полигональные модели насыпи первой, второй и третьей конфигурации, интерполированные методом крикинга приведены на фиг. 8, 9, 10, 11, 12 и 13. Изолинии и трехмерные полигональные модели насыпи первой, второй и третьей конфигурации, интерполированные методом радиальных базисных функций приведены на фиг. 14, 15, 16, 17, 18 и 19.
Расхождение между различными методами расчета объема составляет менее 1%, что подтверждает достаточно высокую точность моделей.
Для определения степени применимости предложенного способа расчета объема насыпи было произведено сравнение численных значений объемов и сравнение их с допустимой погрешностью определения. Согласно пункту 119 инструкции по производству маркшейдерских работ допустимая погрешность определения объема взорванных, рассыпных и прочих пород определяется по формуле:

где V - объем вынутых (взорванных) пород, приведенный к объему в целике, м3.
Зависимость (1) используется при объемах от 45 до 2200 тыс.м3. Если объем пород больше 2200 тыс.м3, то принимают допустимую погрешность определения 1,5%; если объем меньше 45 тыс.м3, то допустимая погрешность σVдоп не должна превышать 10%. В рассмотренном выше случае объем V составляет менее 45 тыс.м3, следовательно, предельно допустимая погрешность должна составлять не более 10%.
В качестве эталонных значений для сравнения использовано отношение веса снимаемого продукта к его насыпной плотности, равной 1,02 кг/м3.

Сравнивая полученное значение 5,72% с предельно допустимым значением 10% можно судить о достаточно точном определении объема насыпи, так как вычисленная погрешность не превышает предельно допустимого значения погрешности определения объема.
Таким образом, рассмотренный в настоящей заявке способ фотограмметрии является эффективным инструментом для подсчета объема сыпучих материалов на закрытых складах, позволяющим получать оперативную информацию о движении запасов, сокращающим время измерений по сравнению с традиционным методом за счет применения на полевом этапе статичных камер, а также обеспечивающим автоматизацию процесса получения картографического материала за счет применения на камеральном этапе автоматизированной системы обработки изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного расчета объема сыпучего материала на складах закрытого типа | 2021 |
|
RU2788655C1 |
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМОВ СЫПУЧИХ МАТЕРИАЛОВ НА ОТКРЫТЫХ СКЛАДАХ С ПРИМЕНЕНИЕМ ВОЗДУШНОГО ОПТИЧЕСКОГО СКАНИРОВАНИЯ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ КОМПЛЕКСОВ | 2016 |
|
RU2646538C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ СТВОЛОВОЙ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВОЗДУШНОЙ БЕСПИЛОТНОЙ СЪЕМКИ | 2021 |
|
RU2773144C1 |
| НЕЙРОННАЯ ТОЧЕЧНАЯ ГРАФИКА | 2019 |
|
RU2729166C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ, ОТОБРАЖЕНИЯ И ИНТЕРПРЕТАЦИИ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ ДЛЯ ГЕОДЕЗИЧЕСКОГО МОНИТОРИНГА ОПЕРАТИВНОЙ ОБСТАНОВКИ ПАВОДКОВОЙ СИТУАЦИИ С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 2016 |
|
RU2633642C9 |
| ЦИФРОВОЙ СПОСОБ СОЗДАНИЯ НЕИСКАЖЕННЫХ ПРОЕКЦИЙ НА ПОВЕРХНОСТИ РЕАЛЬНЫХ ОБЪЕКТОВ | 2023 |
|
RU2821838C1 |
| МОДЕРНИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ АЭРОФОТОСЪЕМКОЙ ДЛЯ ПИЛОТИРУЕМЫХ ВОЗДУШНЫХ СУДОВ (МБСУ АФС) | 2016 |
|
RU2646539C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ГОРОДСКИХ ОБЪЕКТОВ | 2015 |
|
RU2612571C1 |
| Способ получения, обработки, отображения и интерпретации геопространственных данных для кластеризации неоднородности техногенно измененных территорий | 2022 |
|
RU2806406C1 |





Способ определения объема насыпи в закрытых складах включает в себя подготовительный, полевой и камеральный этапы. На подготовительном этапе выполняют определение количества статичных камер и закрепляют их над измеряемой насыпью, подключая их к сети Ethernet, и размещают на полу склада опознавательные знаки, при этом камеры и опознавательные знаки координируют в условной системе координат. На полевом этапе осуществляют сьемку насыпи всеми камерами и передачу фотографий по сети Ethernet удаленной автоматизированной системе обработки изображений. На камеральном этапе снимкам присваивают координату фотографирования, далее последовательно осуществляют совмещение и предварительное выравнивание полученных фотографий, расстановку и совмещение опорных точек с опознавательными знаками с указанием их координат, уточнение координат камер, генерацию плотного облака точек и построение карты высот на его основе. Далее осуществляют распознавание контура насыпи, синтез контура из изолиний и трехмерной полигональной модели насыпи с последующей интерполяцией модели и определением объема насыпи. Повышается точность измерения объема сыпучих продуктов, находящихся на закрытых складах. 7 з.п. ф-лы, 6 табл., 19 ил.
1. Фотограмметрический способ определения объема насыпи в закрытых складах, включающий подготовительный, полевой и камеральный этапы, отличающийся тем, что на подготовительном этапе выполняют определение необходимого количества статичных камер с учетом требований к проценту поперечного и продольного перекрытия кадров, закрепляют камеры над измеряемой насыпью, подключают их к сети Ethernet и размещают на полу склада опознавательные знаки, при этом камеры и опознавательные знаки координируют с помощью геодезического оборудования в условной системе координат, связанной со стенами помещений; на полевом этапе осуществляют одновременную сьемку насыпи всеми камерами и передачу фотографий по сети Ethernet удаленной автоматизированной системе обработки изображений; на камеральном этапе снимкам присваивают координату фотографирования, далее с помощью упомянутой системы последовательно осуществляют совмещение и предварительное выравнивание полученных фотографий, расстановку и совмещение опорных точек с опознавательными знаками с указанием их координат, уточнение координат камер, генерацию плотного облака точек и построение карты высот на его основе; далее осуществляют распознавание контура основания насыпи, нарушений бортов, точек пола и сторонних объектов, синтез контура из изолиний и трехмерной полигональной модели насыпи с последующей интерполяцией модели и определением объема насыпи.
2. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что количество статичных камер определяют с учетом 50% поперечного перекрытия и 50% продольного перекрытия кадров.
3. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что в качестве камер используют неметрические бытовые камеры с КМОП-матрицей.
4. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что в качестве геодезического оборудования используют тахеометр.
5. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что интерполяцию полигональной модели насыпи осуществляют с помощью метода кригинга.
6. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что интерполяцию полигональной модели насыпи осуществляют с помощью метода радиальных базисных функций.
7. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что определение объема насыпи осуществляют методом трапеций.
8. Фотограмметрический способ определения объема насыпи в закрытых складах по п. 1, отличающийся тем, что определение объема насыпи осуществляют методом Симпсона.
| KR 102076914 B1, 12.02.2020 | |||
| СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМОВ СЫПУЧИХ МАТЕРИАЛОВ НА ОТКРЫТЫХ СКЛАДАХ С ПРИМЕНЕНИЕМ ВОЗДУШНОГО ОПТИЧЕСКОГО СКАНИРОВАНИЯ С БЕСПИЛОТНЫХ АВИАЦИОННЫХ КОМПЛЕКСОВ | 2016 |
|
RU2646538C1 |
| CN 101936760 B, 28.03.2012. | |||

