ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к аэросъемочным системам, а именно к модернизированной бортовой системе управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС).
УРОВЕНЬ ТЕХНИКИ
Основное применение данной системы (МБСУ АФС) рассчитано на оперативный мониторинг систем газопровода, однако может применятся при мониторинге любых других линейных объектов и решении других общеизвестных задач по топографии. На мировом рынке присутствует множество аналогов аэросъемочных систем, например "DMC-фирма Intergraph (США) (http://www.intergraphxorn/global/ru/photo/ia.aspx), "RCD-30" и "ADS-40" - Leica Geosystems (Швейцария) (http://leica-geosystems.com), "A3"-VisionMap (Израиль) (http://www.visionmap.com/rus). Все вышеперечисленные системы предназначены для выполнения задач широкого профиля и не заточены под решение специфической задачи, как мониторинг сетей газопровода в ограниченных условиях аэросъемки. Также большинство из них имеют крупные габариты и вес, что создает определенные сложности при установке на воздушные суда малой авиации, которые в свою очередь активно задействованы при мониторинге сетей газопровода.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Технической задачей изобретения является создание МБСУ АФС для проведения оперативного мониторинга сетей газопровода и элементов его инфраструктуры в условиях ограничения по параметрам проведения аэрофотосъемки посредством получения высокоточных ортофотопланов местности (например, местности пролегания сетей газопровода с элементами его инфраструктуры) для дальнейшего метрического и визуального анализа.
Техническим результатом является снижение массогабаритных показателей бортовой системы управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС) с одновременным повышением оперативности получения изображений местности, необходимых для построения высокоточного ортофотоплана.
Для достижения указанного результата разработана МБСУ АФС, содержащая: управляющий контроллер, соединенный с двумя цифровыми аэрофотоаппаратами и запоминающим устройством, причем оптические оси упомянутых аэрофотоаппаратов расположены таким образом, чтобы обеспечить одновременное получение изображений двух маршрутов с поперечным перекрытием между собой в 30%.
Описанная выше конструкция МБСУ АФС, которая основывается на использовании аэрофотоаппаратов, обладает меньшими габаритами и весом по сравнению с известными аналогами, в частности реализованными на основе систем лазерного сканирования, обладающими большими габаритами и массой (от 200 до 300 кг), при этом упомянутое расположение оптических осей обеспечивает получение сразу двух маршрутов с поперечным перекрытием между собой в 30% за один пролет, вследствие чего получается устойчивая фотограмметрическая модель и сокращается время на проведение аэрофотосъемки, а также повышается скорость сбора данных, необходимых для построения высокоточного ортофотоплана. Построенный высокоточный ортофотоплан на основе полученных изображений маршрутов с поперечным перекрытием между собой в 30% не уступает по своей точности цифровым моделям рельефа, выполненным посредством лазерного сканирования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания сущности изобретения, и чтобы более ясно показать, каким образом оно может быть осуществлено, далее будет сделана ссылка, лишь в качестве примера, на прилагаемые чертежи, на которых:
фиг. 1 - техническая схема элементов МБСУ АФС.
фиг. 2 - расположение оптических осей аэрофотоаппаратов в составе МБСУ АФС.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 изображена техническая схема элементов МБСУ АФС, в частности, в состав которой входят: управляющий контроллер 1; два цифровых аэрофотоаппарата 2 и 3, подключенные ко входу 4 управляющего контроллера 1; запоминающее устройство 5, реализованное на базе управляющего контроллера 1; высокоточный геодезический GNSS приемник 6 с антенной 7 для получения центров фотографирования, соединенный с запоминающим устройством 5; GNSS приемник 8 для навигации, реализованный на базе контроллера, соединенный с антенной 9; блок питания 10 для обеспечения питания высокоточного GNSS приемника 6 и управляющего контроллера через соответствующий вход питания 11; кнопка спуска затвора 12, подключенная ко входу 13 управляющего контроллера; внешнее вычислительное устройство 15, подключенное к резервному разъему L через интерфейс связи 14, реализованный на базе микросхемы FTDI; монитор пилота 16, подключенный к выходу внешнего вычислительного устройства 15; и резервный разъем R.
Управляющий контроллер 1, входящий в состав МБСУ АФС, предназначен для:
- обработки сигналов с датчиков ориентации, входящих в состав навигационного GNSS приемника 8 и инерциальной системы (IMU);
- обеспечения приема сигналов GNSS, определения местоположения и координат центров фотографирования;
- сбора данных телеметрии от навигационного GNSS приемника 8, записи их в запоминающее устройство 5 и передачи по интерфейсу UART;
- сохранения в памяти запоминающего устройства 5 маршрута полетного задания и контроля его прохождения;
- управления фотоаппаратурой (питание, спуск затвора автоматический, спуск затвора ручной, контроль по синхроимпульсу).
Программно-аппаратные компоненты, необходимые для работы управляющего контроллера 1 по его назначению, расположены в блоке управляющего контроллера. Передача данных между управляющим контроллером 1 и внешним вычислительным устройством 15 (ПК, ноутбуком, планшетным ПК и пр.) осуществляется через интерфейс связи 14, например, при помощи интерфейса USB.
Предпочтительно, корпус блока управляющего контроллера может быть выполнен из анодированного алюминия и окрашен в черный цвет, а размеры корпуса могут составлять (мм): 63×65×16.
Характеристики разъемов блока управляющего контроллера:
- разъем питания 11 - Molex MicroFit 6 pin male;
- разъем 4 для управления фотоаппаратурой - Molex MicroFit 6 pin male;
- разъем 13 ручного спуска затвора - Molex MicroFit 4 pin male;
- разъем 5 подключения внешнего приемника GNSS - Molex MicroFit 6 pin male
- резервные разъемы L и R - Molex MicroFit 4 pin male и 6 pin male соответственно.
- разъемы антенн GNSS - SMA F.
Навигационная система на базе GNSS приемника 8 предназначена для определения трехмерных координат и параметров движения. Основным компонентом системы является GPS-модуль, например, фирмы uBlox «NEO M8N», интегрированный в управляющий контроллер. Параметры движения в связанной системе координат измеряются курсовертикалью на основе датчика, например, фирмы Invensense MPU6050.
Два цифровых аэфотоаппарата 2 и 3, в частности, могут представлять цифровые камеры, например, марки Sony Cyber-shot DSC-RX1.
В качестве высокоточного геодезического GNSS приемника 6 может использоваться, например, приемник Javad «TR-G3T», а в качестве антенны 7 - авиационная GNSS антенна («Antcom G5Ant-42AT1»).
Блок питания 10, в частности, может быть выполнен в виде свинцовых аккумуляторов на 7 А/ч, 12 v с габаритами: 151×65×100 мм.
Внешнее вычислительное устройство 15 реализовано на базе такого вычислительного средства, как ПК, ноутбук, планшетного ПК и пр., и выполнено с возможностью обработки информации, получаемой от управляющего контроллера 1, отображения результатов съемки и визуализации процесса аэрофотосъемки на мониторе пилота 15.
Также внешнее вычислительное устройство 15 дополнительно содержит программно-аппаратные средства, обеспечивающие возможность проведения аэрофотосъемки (АФС) с пилотируемых ЛА и проверки логов полета. Под возможностью проведения АФС понимается, в частности, проектирование АФС, выполнение АФС и проверка проведенных полетов. В том числе внешнее вычислительное устройство 15 предоставляет возможности для работы с площадными объектами (съемка полигонов) и протяженными объектами (линейная съемка) и обеспечивает несколько режимов работы МБСУ АФС: «простой» режим, режим «эксперта» и «плеер». В «простом» режиме работы вычислительное устройство 15 предоставляет возможность пользователю создать проект АФС, в котором задается район АФС либо маршрут и параметры АФС: высота полета, разрешение на местности, параметры камеры, продольный и поперечный базис.
Функции «простого» и «экспертного» режима идентичны, но в режиме «эксперта» на экране внешнего вычислительного устройства 15 или мониторе пилота 16 отображается окно со свойствами проекта АФС, которые пользователь может отредактировать. Переключение между режимами не изменяет глобальных свойств проекта АФС. Например, можно начать составление проекта АФС в «простом» режиме, при необходимости переключиться в режим «эксперта» для изменения каких-либо упомянутых параметров, а затем вернуться в «простой» режим, чтобы окно параметров не занимало рабочую область экрана. Режим «плеера» позволяет реконструировать полет по автоматически регистрируемым данным и основное назначение этого режима - восстановление данных привязки фотографий в случае, когда в ходе полета был нарушен штатный режим работы.
На фиг. 2 изображен пример расположения оптических осей аэрофотоаппаратов (АФА) в составе МБСУ АФС относительно оси ЛА, где SАФА1 и SАФА2 - центры проекций АФА, α - это угол отклонения оси АФА 1 от Оси ЛА, β - это угол отклонения оси АФА 2 от оси ЛА, Ру - поперечное перекрытие снимком изображений. Значения углов α и β выбираются таким образом, чтобы обеспечить поперечное перекрытие Ру - 30%. Оси цифровых аэрофотоаппаратов от вертикальной оси ЛА, предпочтительно, направлены во взаимно противоположные стороны, а для обеспечения наибольшей зоны охвата аэрофотоаппаратов углы α и β задают в 15°.
Далее в качестве примера осуществления заявленного решения и подтверждения достижения указанного технического результата будет описан алгоритм проведения аэрофотосъемки с использованием МБСУ АФС. В данном примере в качестве объекта исследования для мониторинга выбрана система газопровода и элементы его инфраструктуры.
Перед проведением аэрофотосъемки посредством внешнего вычислительного устройства 15 создают проект аэрофотосъемки. В проект аэрофотосъемки, частности, входит маршрут и параметры аэрофотосъемки, определенные в зависимости от требуемых условий, например требуемого продольного перекрытия (как правило от 60% и выше) и зоны охвата. Маршрут аэрофотосъемки соответственно прокладывается вдоль пролегания сетей газопровода с элементами его инфраструктуры. В случае, если объект исследования является площадным объектов, то задается площадь, в которой строятся маршруты согласно заданному поперечному перекрытию.
Предпочтительными параметрами аэрофотосъемки, например, для мониторинга сетей газопровода и его инфраструктуры являются следующие технические требования: высота полета не должна превышать 600 м над поверхностью земли, захват на местности должен составлять 550 м в каждую сторону от оси газопровода, разрешение на местности должно составлять не более 20 см. и географическая привязка снимков должна быть обеспечена с точностью менее 0,5 м. а также выполнение АФС по линейному объекту в один пролет.
Созданный проект аэрофотосъемки загружается в запоминающее устройство 5 управляющего контроллера системы МБСУ АФС, предварительно установленной с помощью установочной плиты на ЛА. В качестве ЛА может быть использован, например, вертолета КА-26.
Далее пилот ЛА осуществляет пролет по заданному маршруту, который отображается на монитор пилота 16, выводимый внешним вычислительным устройством 15. Во время полета управляющий контроллер 1 получает данные телеметрии и сигналы с датчиков ориентации, необходимые для определения параметров ЛА (высота съемки, ориентация, скорость ЛА и т.д.), а также сигналы от высокоточного геодезического GNSS приемника 6, необходимые для определения центров фотографирования, и сигналы GNSS приемника 8, необходимые для определения местоположение ЛА. Определенные параметры и местоположение ЛА сравниваются управляющим контроллером 1 с маршрутом и параметрами аэрофотосъемки, заданными в проекте аэрофотосъемки. Таким образом, управляющий контроллер обеспечивает контроль прохождения маршрута полетного задания.
Если определенные параметры и месторасположение ЛА совпадают с маршрутом и параметрами аэрофотосъемки, заданными в проекте аэрофотосъемки, то управляющий контроллер 1 направляет синхронный импульс для срабатывания затвора аэрофотоаппаратов 2 и 3. При этом упомянутый синхронный импульс направляется в зависимости от скорости ЛА, определенной управляющим контроллером 1, и положения ЛА на маршруте аэрофотосъемки, в соответствии с заданным продольным базисом - расстоянием между центрами снимков, которое обеспечивает нужное перекрытие снимков. Дополнительно управляющий контроллер 1 содержит интерфейс для подключения кнопки спуска затвора, посредством которой в случае внештатной ситуации пилот ЛА либо оператор АФС могут в ручном режиме направить на управляющий контроллер 1 команду для генерирования синхронного импульса для срабатывания затвора аэрофотоаппаратов.
Полученные снимки сохраняются в памяти запоминающих устройств аэротофоаппаратов. Оптические оси упомянутых аэрофотоаппаратов расположены таким образом, чтобы обеспечить одновременное получение изображений двух маршрутов с поперечным перекрытием между собой в 30%. Для обеспечения данной задачи упомянутые оптические оси могут быть отклонены от вертикальной оси летательного аппарата (ЛА) во взаимно противоположные стороны (см. фиг. 2), например, под углом 15°.
В памяти запоминающего устройства 5 управляющим контроллером 1 также фиксируется время срабатывания затвора аэрофотоаппаратов и месторасположение ЛА в момент срабатывания затвора аэрофотоаппаратов. Данная информация предназначена для определения управляющим контроллером 1 центров фотографирования, причем для каждого изображения центр фотографирования определяется с учетом смещения фазового центра антенны 7 GNSS приемника 6.
Все сохраненные в запоминающем устройстве данные и весь процесс аэротофосъемки могут быть отображены на мониторе пилота 16. Для обеспечения данной задачи МБСУ АФС содержит интерфейс для передачи данных от управляющего контроллера к внешнему вычислительному устройству 15, например интерфейс USB и UART, которое обеспечивает их отображение на мониторе пилота 16. Предпочтительно, данные телеметрии передаются по интерфейсу UART, тогда как остальные упомянутые данные передаются по интерфейсу USB. Дополнительно внешнее вычислительное устройство 15 выполнено с возможностью контроля процесса АФС, осуществляемого управляющим контроллером, посредством оснащения его дополнительными программно-аппаратными техническими средствами.
Далее на основе полученных от управляющего контроллера 1 изображений двух маршрутов и центров фотографий посредством внешнего вычислительного устройства 15 осуществляют построение высокоточного ортофотоплана местности в местах пролегания сетей газопровода и его окружения в целях мониторинга.
В результате проведения апробации заявленного решения при проведении мониторинга сетей газопровода с пилотируемых ЛА с применением МБСУ АФС и оперативной обработки полученных данных на объектах ООО «Газпром трансгаз Москва» в Калужской области были получены следующие результаты.
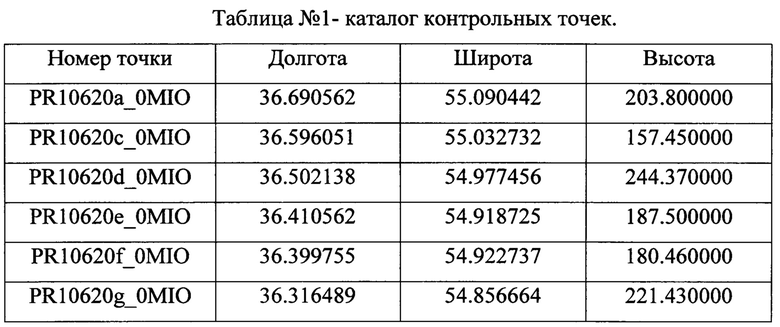
После проведения процессов камеральной обработки и получения итогового высокоточного ортофотоплана была проведена оценка точности полученного результата. Оценка точности проводилась путем измерения контрольных точек (планово-высотных опознавательных знаков (ПВО)), заранее замаркированных и измеренных на участке проведения АФС геодезическим методом. Всего было замаркировано 14 ПВО на протяжении всего участка, каталог контрольных точек представлен в Таблице №1.

Результаты измерений контрольных точек представлены в Таблице №2.

Пояснения к Таблице 2:
столбец «Ошибка XY (см)» - среднеквадратичная ошибка по осям X и Y для указанной опорной точки/положения маркера;
столбец «Ошибка Z (см)» - ошибка по оси Z для указанной опорной точки/положения маркера;
столбец «Ошибка (см)» - среднеквадратичная ошибка по осям X, Y, Z для указанной опорной точки/положения маркера;
столбец «Проекция» - число проекций для указанной опорной точки/положения маркера на всех изображениях;
столбец «Ошибка (пикс.)» - среднеквадратичная ошибка по осям X, Y для указанной опорной точки/положения маркера на всех изображениях;
строка «Общая» - усредненное значение для всех опорных точек/положений маркера.
Исходя из результатов измерения контрольных точек, представленных в таблице №2, мы видим, что средняя квадратическая ошибка (СКО) измерения составляет ≤0,5 м, что соответствует требованиям технического задания (ТЗ), в соответствии с которым СКО должна быть не более 0,5 метра. Разрешение на местности составило GSD=12,5 см/пиксель, что также удовлетворяет условиям ТЗ до 20 см. Все измерения и расчеты проводились в системе координат WGS 84 по требованиям ТЗ.
В итоге был получен высокоточный ортофотоплан, который был загружен в геоинформационную программу «ГИС СПУТНИК» для дальнейшей оценки, проведения измерений и векторизации.
По итогам проведенной апробации можно сделать выводы о том, что представленное решение отвечает всем требованиям, предъявленным ООО «Газпром трансгаз Москва» для проведения оперативного мониторинга сетей газопроводов. В апробации использовалась аэросъемочная система МБСУ АФС, которая зарекомендовала себя как эффективная и надежная в условиях эксплуатации на пилотируемых аппаратах, в частности КА-26.
Заявленная система может быть использована для решения как узконаправленных задач - оперативный мониторинг сетей газопровода, так и ряда других задач широкого применения, а именно:
1. Мониторинг линейных и площадных объектов (газопроводы, нефтепроводы, ЛЭП, лесоустройство, сельское хозяйство и т.д.);
2. Топографические задачи - получение картографического материала (ортофотопланы) и 3D модели местности (ЦММ) и 3D модели рельефа (ЦМР);
3. Маркшейдерия - определение объемов выемки в карьерах;
4. Строительство дорог (устройство дорожного полотна) выемка, насыпь и т.д.;
5. Определение объемов сыпучих материалов на открытых складах;
6. Лесная промышленность - определение объемов штабелей бревен на лесозаготовках и складах, лесотаксация с применением спектра CIR (при доработке оптической системы);
7. Получение трехмерных моделей объектов и их анализ (строительство и реставрация);
8. Сельское хозяйство (с применением индекса NDVI при доработке оптической системы).


Изобретение относится к аэросъемочным системам, а именно к модернизированной бортовой системе управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС). Заявленная модернизированная бортовая система управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС) содержит управляющий контроллер, соединенный с двумя цифровыми аэрофотоаппаратами и запоминающим устройством, причем оптические оси упомянутых аэрофотоаппаратов расположены таким образом, чтобы обеспечить одновременное получение изображений двух маршрутов с поперечным перекрытием между собой в 30% для сохранения их в памяти запоминающего устройства. Технический результат заключается в снижении массогабаритных показателей бортовой системы управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС) с одновременным повышением оперативности получения изображений местности, необходимых для построения высокоточного ортофотоплана. 12 з.п. ф-лы, 2 ил.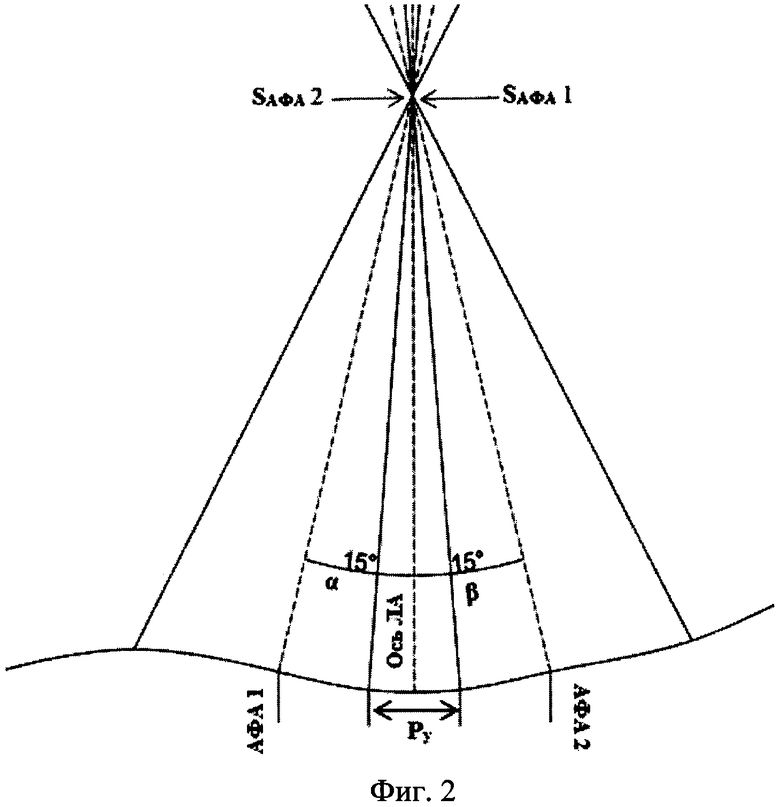
1. Модернизированная бортовая система управления аэрофотосъемкой для пилотируемых воздушных судов (МБСУ АФС), содержащая управляющий контроллер, соединенный с двумя цифровыми аэрофотоаппаратами и запоминающим устройством, причем оптические оси упомянутых аэрофотоаппаратов расположены таким образом, чтобы обеспечить одновременное получение изображений двух маршрутов с поперечным перекрытием между собой в 30% для сохранения их в памяти запоминающего устройства.
2. Система по п. 1, отличающаяся тем, что упомянутое поперечное перекрытие обеспечивается отклонением осей цифровых аэрофотоаппаратов от вертикальной оси летательного аппарата (ЛА) во взаимно противоположные стороны.
3. Система по п. 2, отличающаяся тем, что углы отклонения осей цифровых аэрофотоаппаратов от вертикальной оси ЛА равны 15°.
4. Система по п. 1, отличающаяся тем, что одновременное получение изображений двух маршрутов обеспечивается посредством направления управляющим контроллером синхронного импульса для срабатывания затвора упомянутых аэрофотоаппаратов.
5. Система по п. 4, отличающаяся тем, что управляющий контроллер выполнен с возможностью направления упомянутого синхронного импульса в зависимости от скорости и положения ЛА на маршруте аэрофотосъемки.
6. Система по п. 1, отличающаяся тем, что управляющий контроллер дополнительно содержит интерфейс для подключения кнопки спуска затвора (для внештатных ситуаций).
7. Система по любому из пп. 1-6, отличающаяся тем, что дополнительно содержит навигационную систему и высокоточный геодезический GNSS приемник, соединенные с управляющим контроллером.
8. Система по п. 7, отличающаяся тем, что управляющий контроллер выполнен с возможностью сохранения времени срабатывания затвора аэрофотоаппаратов, а также месторасположения ЛА в момент срабатывания затвора.
9. Система по п. 8, отличающаяся тем, что управляющий контроллер выполнен с возможностью определения координат центров фотографирования, причем для каждого изображения центр фотографирования определяется с учетом смещения фазового центра антенны высокоточного геодезического GNSS приемника.
10. Система по 7, отличающаяся тем, что управляющий контроллер выполнен с возможностью контроля прохождения маршрута полетного задания.
11. Система по п. 1, отличающаяся тем, что управляющий контроллер выполнен с возможностью сбора данных телеметрии, записи их в запоминающем устройстве и передачи по интерфейсу UART.
12. Система по п. 1, отличающаяся тем, что дополнительно содержит интерфейс для передачи данных от управляющего контроллера к внешнему вычислительному устройству с возможностью контроля и визуализации процесса аэрофотосъемки.
13. Система по п. 1, отличающаяся тем, что питание системы осуществляться автономным способом от аккумуляторов.
| CN 203845021 U, 24.09.2014 | |||
| Аэрофотосъемочная камера | 1945 |
|
SU67855A1 |
| US 20100040354 A1, 18.02.2010 | |||
| Электростатический микрофон | 1930 |
|
SU24003A1 |

