Ссылка на родственные заявки
Настоящее изобретение испрашивает приоритет немецкой заявки на патент № 10 2019 202 144.1, поданной 18 февраля 2019 г., которая в полном объеме путем ссылки включается в настоящий документ.
Область изобретения
Изобретение касается автоматизации производства и логистики. В частности, изобретение касается радарного датчика для автоматизации производства и логистики, применения такого радарного датчика для замены оптического датчика в области автоматизации производства и логистики и применения такого радарного датчика для замены лазерного датчика светового затвора.
Уровень техники
В автоматизации производства и логистики применяются оптические датчики, например, для измерения значений расстояния или углов. Другими примерами применения являются датчики скорости вращения или датчики для распознавания присутствия персонала. Эти оптические датчики могут быть выполнены, например, в виде светового затвора для распознавания приближения человека к опасной области.
Краткое содержание
Задачей изобретения является предоставить экономичную альтернативу известным оптическим датчикам, и в частности световым затворам.
Эта задача решается с помощью признаков независимых пунктов формулы изобретения. Усовершенствованные варианты изобретения вытекают из зависимых пунктов формулы изобретения и последующего описания вариантов осуществления.
Первый аспект касается радарного датчика для автоматизации производства и логистики. Радарный датчик содержит радарную схемную систему, которая имеет радарный чип, предназначенный для создания, излучения, приема и оценки радарных измерительных сигналов. Предусмотрен корпус, в котором расположена радарная схемная система, при этом радарный чип имеет площадь поперечного сечения меньше 1 см2, и генерируемые радарные измерительные сигналы имеют частоту свыше 160 ГГц, в частности свыше 200 ГГц, и сфокусированы так, что результирующий угол раствора луча составляет меньше 5°, или по меньшей мере меньше 10°, в частности даже меньше 3°.
Например, радарный чип имеет площадь поперечного сечения меньше 0,25 см2.
По одному из вариантов осуществления изобретения корпус имеет ширину 2 см или меньше, высоту 5 см или меньше, и глубину 5 см или меньше.
Высота корпуса проходит при этом в направлении измерения, то есть в направлении, в котором радарный датчик излучает свой измерительный сигнал.
Например, корпус имеет ввертываемую резьбу, имеющую диаметр по большей мере 1,91 см или 0,75 дюйма. Может быть также предусмотрено, чтобы корпус имел ввертываемую резьбу, имеющую диаметр по большей мере 1,27 см или 0,5 дюйма.
Например, корпус выполнен цилиндрическим.
По другому варианту осуществления ширина полосы модуляции для модуляции генерируемых радарной схемной системой радарных измерительных сигналов составляет свыше 4 ГГц, в частности свыше 10 ГГц, в частности 19,5 ГГц или 31,4 ГГц.
Радарный датчик по одному из вариантов осуществления предназначен для создания и отправки FMCW-сигнала (англ. Frequency Modulated Continuous Wave Signal, частотно-модулированный непрерывно излучаемый сигнал).
По другому варианту осуществления частоты генерируемых радарных измерительных сигналов лежат между 231,5 ГГц и 250 ГГц.
По другому варианту осуществления корпус имеет линзу (или две или несколько включенных друг за другом линз), которая предназначена для фокусирования излучаемых и/или принимаемых радарных измерительных сигналов.
Линза имеет, например, диаметр 20 мм или меньше 20 мм.
По другому варианту осуществления радарная схемная система (альтернативно или дополнительно к линзе корпуса) имеет (дополнительную) линзу, выполненную для фокусирования излучаемых радарных измерительных сигналов, прежде чем они попадут на линзу корпуса.
Эта линза имеет, например, диаметр 10 мм или меньше 10 мм.
Например, она насажена непосредственно на элемент излучателя радарной схемной системы.
По другому варианту осуществления линза корпуса находится на расстоянии от 5 мм до 50 мм, в частности 30 мм или меньше, от радарного чипа и/или другой линзы.
По другому варианту осуществления изобретения радарная схемная система имеет радарный чип, имеющий интегрированную в него антенну, на которую тогда, в случае если предусмотрено, насажена линза.
По другому варианту осуществления радарный датчик имеет схему связи, при этом радарный датчик предназначен для того, чтобы в реальном времени регистрировать изменения физической измеряемой величины, которая измеряется радарным датчиком, и выдавать посредством схемы связи, то есть, например, переносить на удаленное устройство управления.
Под «реальным временем» в рамках данного раскрытия следует понимать, что изменения физической измеряемой величины надежно регистрируются и выдаются в пределах предопределенного промежутка времени. В этой связи можно также говорить о мягком требовании реального времени. Аппаратным обеспечением и программным обеспечением должно гарантироваться, что не возникнут никакие неоправданные задержки, которые, например, могли бы препятствовать соблюдению условия реального времени. При этом обработка данных должна осуществляться не сколь угодно быстро; однако она должна осуществляться гарантированно достаточно быстро для каждого случая применения.
По другому варианту осуществления радарный датчик имеет несколько независимых каналов передачи/приема и/или несколько радарных чипов для обеспечения редундантности (избыточности) для критических в отношении безопасности случаев применения.
По другому варианту осуществления радарный датчик имеет двухпроводной интерфейс 4-20 мА, который предназначен для передачи результатов измерений во внешнюю систему управления процессом и для приема энергии, необходимой для эксплуатации радарного датчика.
По другому варианту осуществления радарный датчик выполнен в виде радара уровня наполнения.
В частности, радарный датчик может иметь штекерный разъем, предназначенный для монтажа радарного датчика с помощью накидного ключа в снабженном внутренней резьбой отверстии емкости (в которой находится наполняющий материал).
Другой аспект касается применения описанного выше и далее радарного датчика для замены оптического датчика в области автоматизации производства и логистики, в частности в критической в отношении безопасности области, такой как автоматизированное аварийное отключение машин или установок.
Другой аспект касается применения описанного выше и далее радарного датчика для замены датчика лазерного светового затвора.
Далее со ссылкой на фигуры описываются другие варианты осуществления изобретения. Изображения на фигурах являются схематичными и без соблюдения масштаба. Если в последующем описании фигур используются одинаковые ссылочные обозначения, то они обозначают одинаковые или похожие элементы.
Краткое описание фигур
На фиг.1 показана производственная установка, имеющая радарные датчики согласно одному варианту осуществления.
На фиг.2 показана установка для автоматизации логистики по другому варианту осуществления.
На фиг.3 показано применение радарного датчика в области автоматизации производства и техники безопасности.
На фиг.4 показано радарное измерительное устройство сортировочной установки.
На фиг.5 показана принципиальная конструкция радарного датчика по одному из вариантов осуществления.
На фиг.6 показан другой вариант осуществления радарного датчика.
На фиг.7 показан другой вариант осуществления радарного датчика.
На фиг.8 показан другой вариант осуществления радарного датчика.
На фиг.9 показано применение радарного датчика для автоматизации производства и/или логистики.
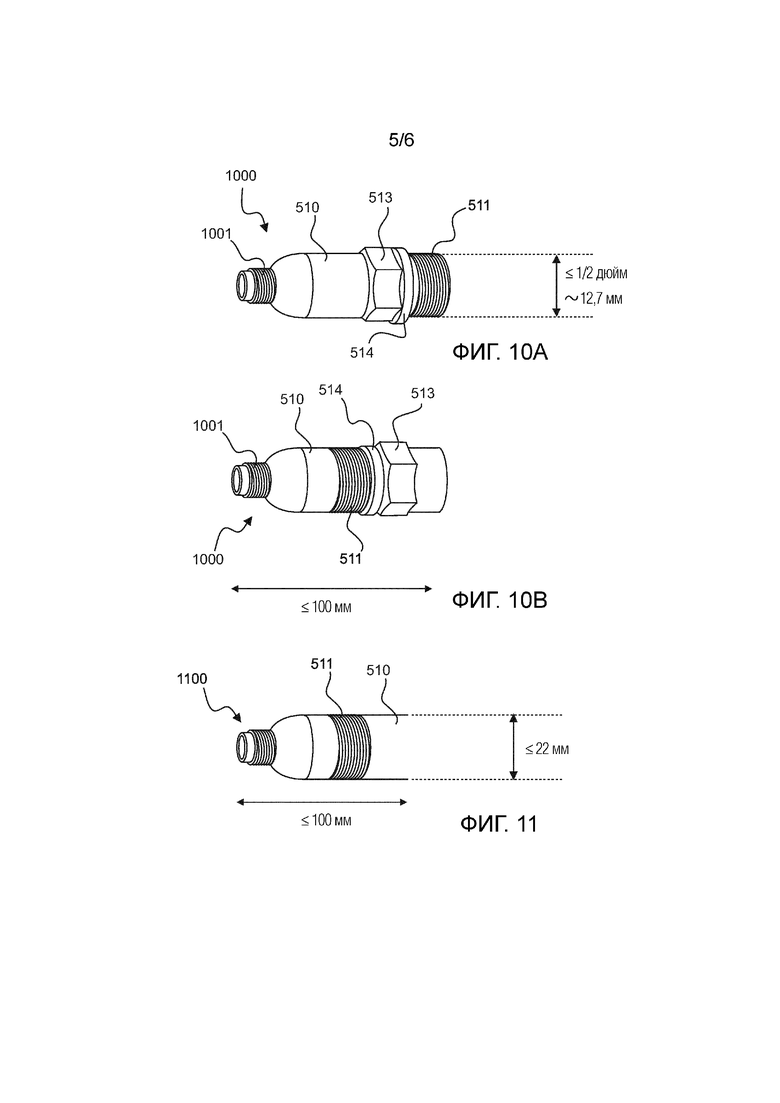
На фиг.10A показан радарный датчик в цилиндрическом исполнении по одному варианту осуществления.
На фиг.10B показан радарный датчик в цилиндрическом исполнении по другому варианту осуществления.
На фиг.11 показан радарный датчик в цилиндрическом исполнении по другому варианту осуществления.
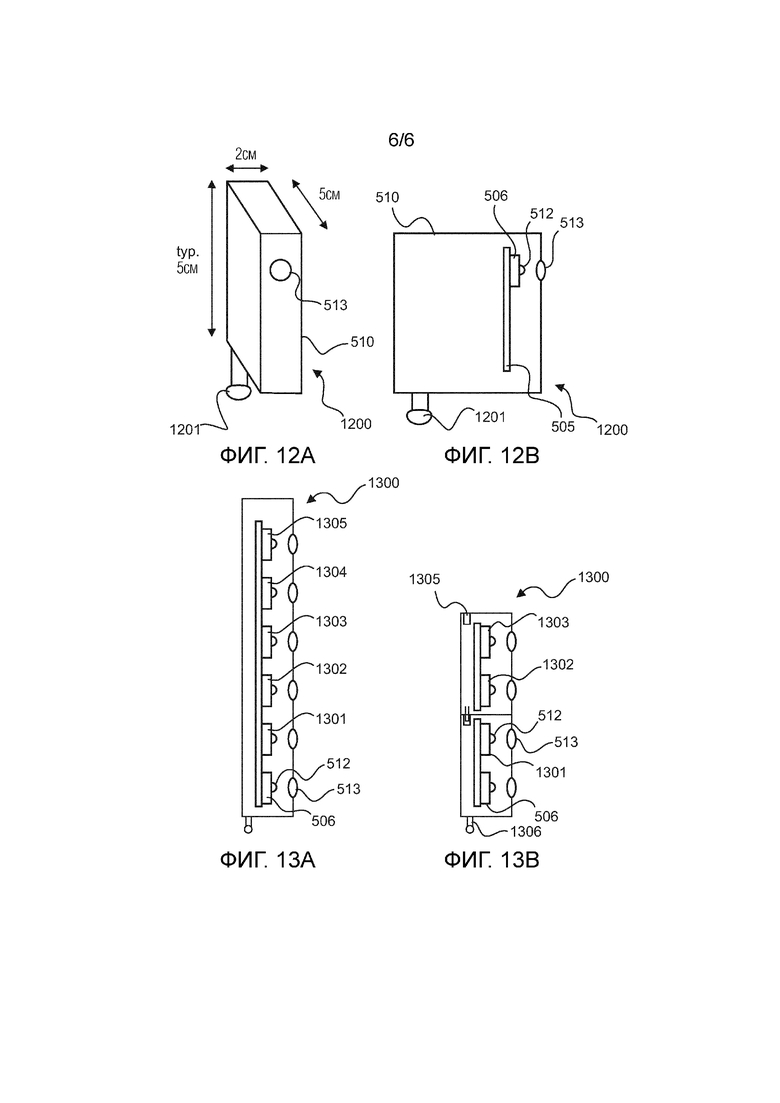
На фиг.12A показан радарный датчик, имеющий корпус в форме прямоугольного параллелепипеда.
На фиг.12B показан радарный датчик фиг.12A на виде сбоку.
На фиг.13A показана защитная решетка радара по одному варианту осуществления.
На фиг.13B показана каскадная конструкция защитной решетки радара из отдельных модулей.
Детальное описание вариантов осуществления
На фиг.1 показана производственная система, имеющая радарные датчики 102, 103 по одному из вариантов осуществления. Благодаря переходу к радарным частотам выше 200 ГГц и интеграции антенн в радарный чип может обеспечиваться миниатюризированная, экономичная измерительная система, которая может выполнять все требования автоматизации производства и/или логистики, и таким образом может заменять существующие оптические датчики с их известными недостатками.
Предоставляется, в частности, измерительное устройство 102, 103 на базе радара, которое способно заменять большую часть оптических датчиков, применявшихся до сих пор в области автоматизации производства и логистики. Для этого измерительное устройство может быть выполнено, в частности, для предоставления значений расстояния или углов. Оно может быть также выполнено в виде датчика скорости вращения, в виде датчика для распознавания присутствия или в виде радарного устройства измерения уровня наполнения.
Благодаря уменьшению длины волны радарного сигнала за счет использования более высоких частот становится возможным упрощение конструкции радарного измерительного устройства путем встраивания на радарном чипе по меньшей мере одного первичного излучателя.
Если до сих пор способы измерения на базе радара из-за размера антенны и размера контуров коммутации могли применяться только в области автоматизации процессов, то при применении предложенных здесь устройств в будущем можно будет создавать небольшие и высокопроизводительные радарные датчики для применения в области автоматизации производства и/или автоматизации логистики.
Устройства для измерения уровня наполнения на базе радара благодаря разнообразным преимуществам радарной измерительной технологии в прошедшие годы нашли большое распространение в области автоматизации процессов. Если под термином технология автоматизации понимается отдельная область техники, которая включает в себя все меры для эксплуатации машин и установок без содействия человека, то отдельная область автоматизация процессов может пониматься как самая низкая степень автоматизации. Целью автоматизации процессов является автоматизировать взаимодействие компонентов всей производственной установки в областях химия, нефть, бумага цемент, судоходство или горное дело. Для этого известны множество датчиков, которые, в частности, были адаптированы к специфическим требованиям технологической промышленности (механическая прочность, нечувствительность к загрязнению, экстремальные температуры, экстремальные давления). Результаты измерений этих датчиков обычно передаются на пост управления, на котором могут мониториться технологические параметры, такие как уровень наполнения, расход, давление или плотность, и вручную или автоматически изменяться настройки для всей производственной установки.
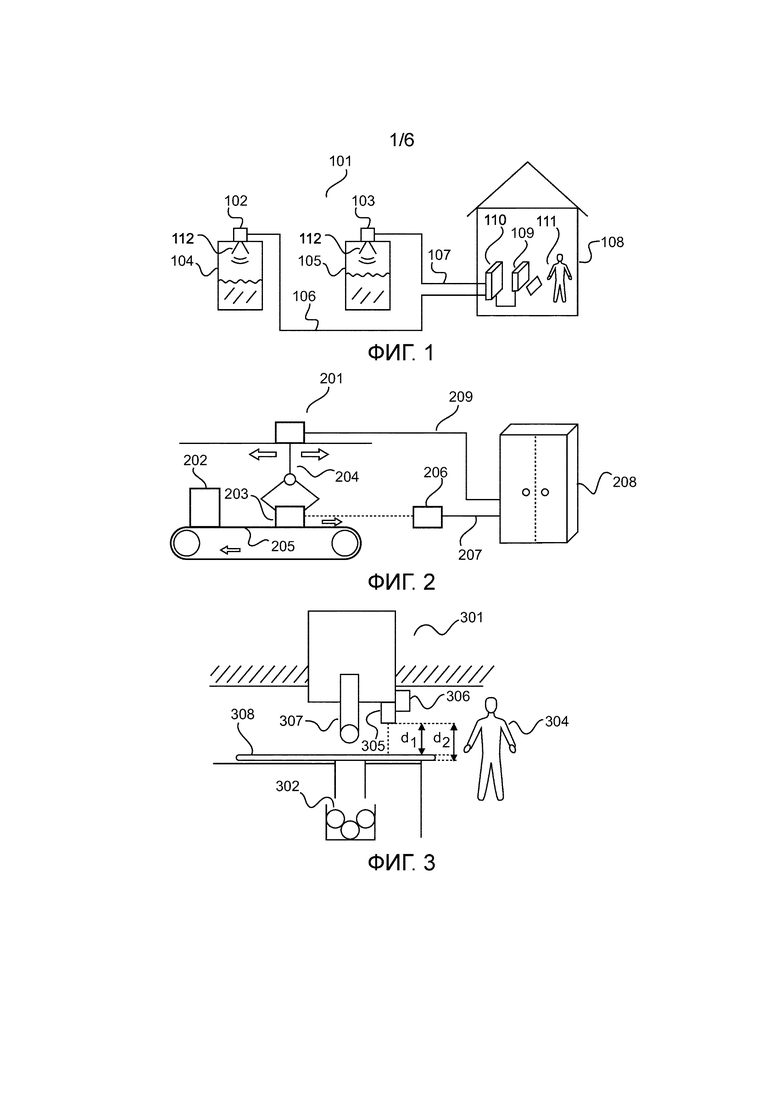
На фиг.1 показан пример такой установки 101. Два наглядно изображенных технологических измерительных устройства 102, 103 регистрируют уровень наполнения емкостей 104, 105 с применением радарных сигналов. Регистрируемые результаты измерений передаются на пост 108 управления с применением специальных линий 106, 107 связи.
Для передачи результатов измерений по линиям 106, 107 связи применяются как проводные, так и беспроводные стандарты связи, которые были оптимизированы применительно к специфическим требованиям измерительной технологии процессов (надежность передачи сигналов в отношении помех, большие дистанции, низкие скорости передачи данных, низкие плотности энергии в связи с требованиями взрывозащиты).
Измерительные устройства 102, 103 включают в себя по этой причине по меньшей мере один блок связи для поддержки стандартов связи, пригодных для технологической промышленности. Примерами таких стандартов связи являются чисто аналоговые стандарты, такие как интерфейс 4…20 мА, или же также цифровые стандарты, такие как HART, Wireless HART или PROFIBUS.
На посту 108 управления поступающие от системы 110 управления процессом данные обрабатываются и визуально изображаются на системе 109 мониторинга. Система 110 управления процессом или же пользователь 111 может на базе этих данных производить изменения настроек, которые могут оптимизировать эксплуатацию всей установки 101. В простейшем случае при угрожающем опорожнении емкости 104, 105 инициируется заказ на снабжение у внешнего поставщика.
Так как стоимость датчиков 102, 103 в области технологической промышленности имеет второстепенное значение по сравнению со всей установкой 101, для оптимальной реализации таких требований, как термостойкость или же механическая прочность, можно согласиться с более высокой стоимостью. Поэтому датчики 102, 103 располагают дорогостоящими компонентами, такими как радарные антенны 112 из высококачественной стали. Поэтому обычная цена пригодного для технологических процессов датчика 102, 103 лежит обычно в пределах нескольких тысяч евро. Известные до сих пор радарные измерительные устройства 102, 103 технологической промышленности применяют для измерения радарные сигналы в диапазоне 6 ГГц, 24 ГГц или же 80 ГГц, причем радарные сигналы модулируются по частоте способом FMCW в диапазоне представленных ранее средних частот. Технически трудной является адаптация антенн 112 к желаемым при измерительной технологии более высоким ширинам полос модуляции. В настоящее время с применением пригодных для технологических процессов конструктивных форм 112 антенн могут реализовываться ширины полос до 4 ГГц.
Совершенно другая отдельная область технологии автоматизации касается автоматизации логистики. При помощи датчиков расстояния и углов в области автоматизации логистики автоматизируются процессы внутри какого-либо здания или в пределах какой-либо отдельной логистической установки.
Характерными случаями применения являются системы для автоматизации логистики в области обработки багажа и грузов в аэропортах, в области мониторинга транспорта (таможенные системы), в торговле, распределении посылок или же также в области безопасности зданий (контроль доступа). Общим для вышеперечисленных примеров является, что от каждой применяющей стороны требуется распознавание присутствия в комбинации с точным замером размера и положения какого-либо объекта. При этом известные радарные системы до сих пор не способны выполнять эти требования, из-за чего в известном уровне техники применяются различные датчики на базе оптических принципов (лазеры, СИДы, камеры, времяпролетные камеры).
На фиг.2 показан пример установки для автоматизации логистики. В пределах установки 201 для сортировки посылок посылки 202, 203 сортируются при помощи сортировочного крана 204. При этом посылки по конвейерной ленте 205 входят в сортировочную установку. При помощи одного или нескольких лазерных датчиков 206 и/или датчиков 206 камеры бесконтактным способом определяется как положение, так и размер посылки 203, и при помощи быстрых линий 207 передачи данных передаются в систему 208управления, например, SPS 208 (систему с программируемой памятью), которая обычно является частью установки 201. Так как передача результатов измерений по линиям 207 является критической в отношении времени, а покрываемые дистанции лежат скорее в пределах нескольких метров, в качестве стандартов передачи на каналах 207 связи обычно находят применение быстрые цифровые протоколы, такие как Profinet или Ethercat, которые, в противоположность известным протоколам автоматизации процессов, обладают возможностью реального времени, т.е. гарантированной передачи данных за задаваемое время. Эта возможность реального времени передачи данных, которая может достигаться как с помощью проводных, так и с помощью беспроводных стандартов связи, является основой для управления сортировочным краном 204 посредством линии 209 управления. В противоположность известным радарным измерительным устройствам, оптические датчики 206 обеспечивают возможность точного определения размера и положения объекта 203, так как конструкция миниатюризированных датчиков, имеющих чрезвычайно малый угол раствора луча, в области оптики технически не представляет собой проблемы. Помимо этого, такие системы по сравнению с технологическими измерительными устройствами могут также изготавливаться очень экономично.
Третья отдельная область технологии автоматизации касается автоматизации производства. Ее случаи применения находятся в самых различных отраслях, таких как производство автомобилей, производство продуктов питания, фармацевтическая промышленность или вообще в области упаковки. Целью автоматизации производства является автоматизировать производство товаров машинами, производственными линиями и/или роботами, т.е. заставить выполняться без содействия человека. Применяемые при этом датчики и специфические требования в отношении точности измерения при регистрации положения и размера какого-либо объекта сравнимы с таковыми в предыдущем примере автоматизации логистики. Поэтому обычно также в области автоматизации производства широко применяются датчики на базе оптических способов измерения.
Другая область применения оптических датчиков касается техники безопасности, которая включает в себя как случаи применения в области автоматизации логистики, так и в области автоматизации производства. На фиг.3 показан соответствующий пример. Как только в области полностью или частично автоматизированных производственных или сортировочных установок следует ожидать взаимодействия с человеком, законодателем предусматривается встраивание надлежащих защитных устройств для автоматизированного отключения машин и установок. Штамповочная машина 301 в настоящем примере штампует круглые фасонные детали 302 из листового материала 303. Рабочий 304 ответственен за мониторинг процесса. Чтобы рабочий не мог травмироваться при вмешательстве в машину 301, машина 301 имеет защитный световой затвор 305 или защитную световую завесу 305, которая соединена с машиной 301 линией 306 связи. Защитный световой затвор 305 измеряет расстояние d1, d2 до лежащего под ним объекта и может препятствовать опусканию штампа 307, как при отсутствии листа 303, так и при непреднамеренном вмешательстве пользователя 304 в область штампа. Одной из основных предпосылок безопасной эксплуатации установки является, что датчик 305 может определять расстояние с высокой точностью и надежностью в сочетании с чрезвычайно коротким временем измерения, чтобы распознавать опасные ситуации.
Как в области автоматизации логистики, так и в области автоматизации производства и технике безопасности до сих пор доминируют оптические датчики. Они являются быстрыми и экономичными и могут надежно определять положение и/или расстояние до какого-либо объекта на основе относительно просто фокусируемого оптического излучения, которое лежит в основе измерения. Но одним из значительных недостатков оптических датчиков является их повышенная потребность в техническом обслуживании, так как также в перечисленных ранее областях через несколько тысяч часов эксплуатации можно наблюдать загрязнение датчика, которое значительно ухудшает измерение. Кроме того, именно при применении в производственных линиях измерение может ухудшаться из-за масляных паров или других аэрозолей с образованием тумана и приводить к дополнительному загрязнению оптических датчиков.
Названные ранее недостатки могут преодолеваться путем применения измерительных устройств на базе радара. Прежде чем подробно остановиться на вариантах осуществления в отдельности, на фиг.4 еще раз объединены проблемы, решаемые настоящим раскрытием.
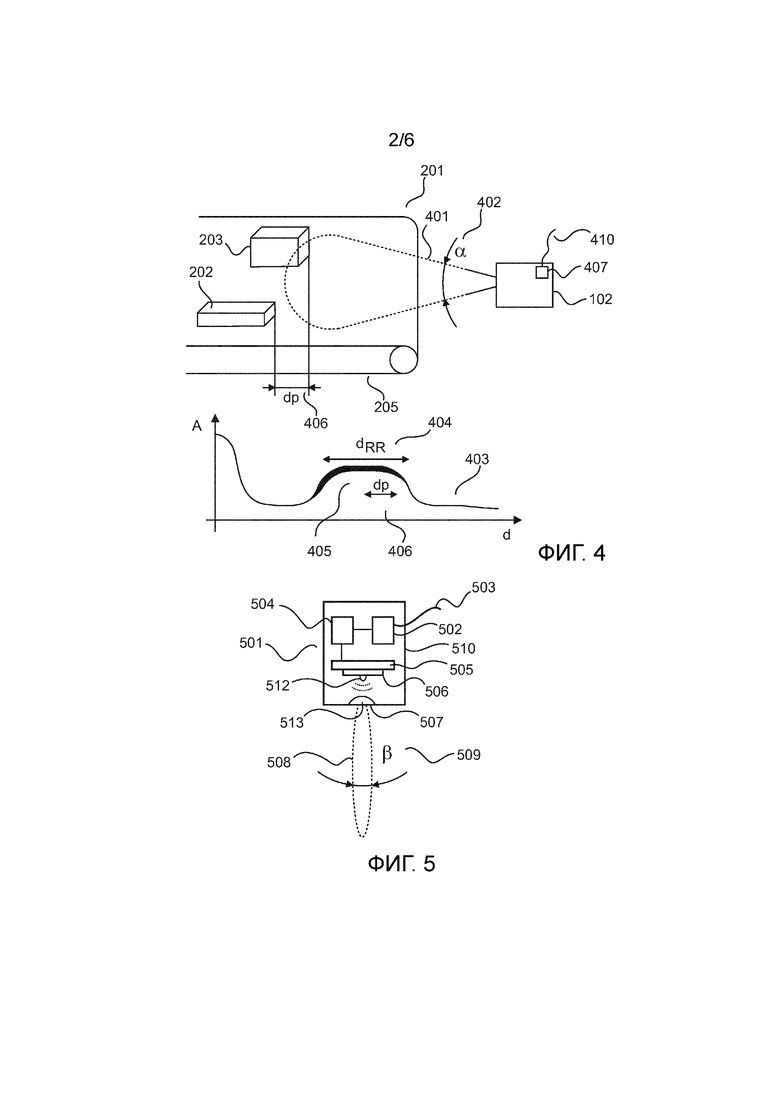
Если бы известное радарное измерительное устройство 102 встраивалось, например, в сортировочную установку 201 вместо оптического датчика 206, то его радарный сигнал 401 в связи с большим углом 402 раствора, обычно 8° или больше, на расстоянии в несколько метров одновременно регистрировал бы обе находящиеся на конвейерной ленте 205 посылки 202, 203. Регистрируемые отражения посылок известными методами преобразуются радарным измерительным устройством 102 в эхо-кривую 403. Если радарное измерительное устройство 102 работает, например, с частотой от 23,5 ГГц до 24,5 ГГц, то ширина dRR 404 одного отдельного эхо 405 составляет уже 15 см. Если расстояние dRR 406 между двумя посылками 202, 203 составляет меньше разрешения 404 радара измерительного устройства 102, то по измерительной технологии больше нельзя распознать, что речь идет о двух посылках. Следует указать, что эта проблема возникает из-за расширенной области 402 регистрации в комбинации с уменьшенным разрешением 404 радара. В конечном итоге применение радарного измерительного устройства 102 в сортировочной установке даже при пренебрежении вышеназванными проблемами потерпело бы неудачу уже из-за того, что устройство 407 связи измерительного устройства 102 не способно передавать результат измерения по каналу 410 связи в реальном времени. Вышеназванные недостатки равным образом проявляются при попытке применения в области техники безопасности (фиг.3).
Описанные выше и далее радарные датчики обеспечивают высокое разрешение радара и очень хорошую фокусировку луча в сочетании с обладающим возможностью работы в реальном времени устройством связи миниатюризированной конструкции по умеренной цене.
На фиг.5 показана принципиальная конструкция радарной системы, которая подходит для применения в автоматизации производства и/или логистики или техники безопасности. Радарное измерительное устройство 501 имеет корпус 510, который включает в себя блок 502 связи, процессор 504, а также высокочастотный блок 505. Этот высокочастотный блок 505 имеет по меньшей мере один интегрированный радарный чип 506, который может создавать и излучать высокочастотные сигналы, имеющие частоту больше 200 ГГц. Эти радарные сигналы проникают сквозь корпус радарного датчика 501 в предопределенном месте 507, при этом корпус датчика 501 по меньшей мере в области проникновения выполнен проницаемым для электромагнитных волн выше 200 ГГц. Радарные сигналы 508 фокусируются фокусирующими элементами или, соответственно, линзами 512, 513 на интегрированном радарном чипе 506 и/или в области проникновения 507 и/или в области между радарным чипом и проникновением таким образом, что результирующий угол 509 раствора луча становится очень маленьким, например, меньше 5°. Определенные измерительным устройством результаты измерений передаются по проводному или беспроводному каналу 503 передачи данных с высокой скоростью передачи данных в локальный распределительный шкаф 208 или машину 301. Опционально может быть предусмотрено выполнение этой передачи данных таким образом, чтобы она была возможна в реальном времени, и при этом достижение своевременного влияния, например, на производственную линию или сортировочное устройство или же своевременное отключение машины до возникновения угрозы человеку. При этом могут находить применение такие стандарты, как Profinet, Power over Ethernet, Ethernet, Ethercat или IO-Link.
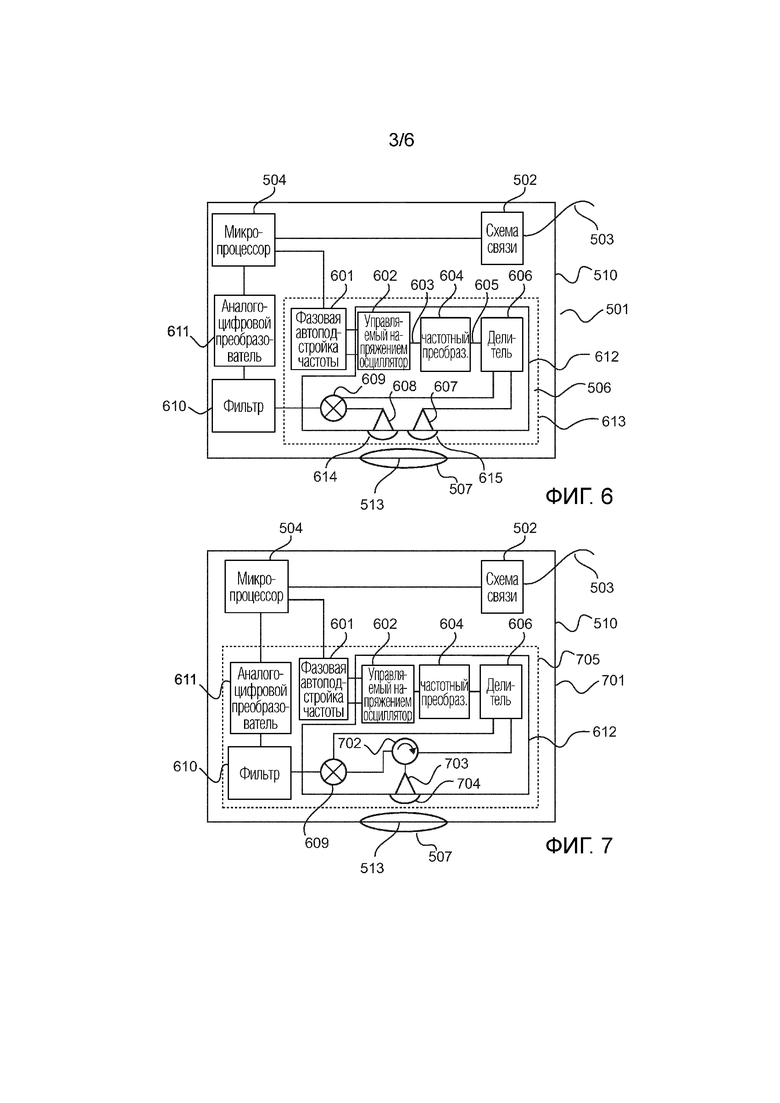
На фиг.6 в деталях показан другой пример осуществления датчика 501. Микропроцессор 504 управляет PLL (англ. Phase Locked Loop, фазовая автоподстройка частоты) 601, осуществляющей целочисленное или предпочтительно дробное деление. Эта PLL, в свою очередь, соединена с управляемым напряжением осциллятором 602, который при взаимодействии с PLL на своем выходе 603 выдает модулированный по частоте сигнал, имеющий среднюю частоту в диапазоне от 10 ГГц до 60 ГГц и ширину полосы между 5 ГГц и 10 ГГц. Вышеназванные параметры могут изменяться на протяжении рабочей фазы измерительного устройства. Генерируемый VCO (англ. Voltage Controlled Oscillator, управляемый напряжением осциллятор) сигнал 603 вводится в частотный преобразователь 604, который преобразует входной сигнал в целевой частотный диапазон больше 200 ГГц. При этом обычно совершаются несколько этапов преобразования каскадом, т.е. сигнал повышается по его частоте по меньшей мере в два отдельных этапа с помощью схем удвоения.
Но может быть также предусмотрена передача сигнала на целевой частотный диапазон свыше 200 ГГц путем одно- или многоступенчатого смешения. Результирующий сигнал 605 лежит предпочтительно в диапазоне выше 200 ГГц, особенно предпочтительными оказались частоты в диапазоне между 230 ГГц и 250 ГГц. Затем этот сигнал вводится в модуль 606 делителя, после чего некоторая часть высокочастотных сигналов излучается через первичный излучатель 607 наружу в направлении проникновения 507. При помощи приемной антенны 608 отражаемые в каждом случае применения радарные сигналы снова регистрируются и преобразуются в смесительном модуле 609 в низкочастотный диапазон. Аналоговый фильтр 610 и аналого-цифровой преобразователь 611 регистрируют сигналы и вводят их для дальнейшей обработки в процессор 504.
Основной идеей настоящего раскрытия является, что повышенное разрешение 404 радара достижимо только при уменьшении ширины эхо 405. При увеличении ширины полосы модуляции больше, чем до 4 ГГц, предпочтительно больше, чем 10 ГГц или особенно предпочтительно до 19,5 ГГц может достигаться возможность уменьшения ширины эхо в миллиметровый диапазон. Таким образом также расположенные близко друг к другу рефлекторы 202, 203, которые могут встречаться в автоматизации производства и логистики, могут надежно регистрироваться по измерительной технологии. Схемотехнически реализация этих увеличенных ширин полос модуляции может экономично поддаваться управлению только тогда, когда основная частота радарного сигнала лежит высоко, предпочтительно выше 200 ГГц. Так как тогда длина волн радарных сигналов на полупроводниковом чипе тоже перемещается в миллиметровый или субмиллиметровый диапазон, распространенные дизайны структур связи или первичного излучателя 607 или приемной антенны 608 могут реализовываться непосредственно на полупроводниковой подложке 612 интегрированного радарного чипа 613, что позволяет получить экономичную конструкцию. В дополнение может быть предусмотрено объединение в пучки излучаемых или принимаемых радарных сигналов в области антенн 607, 608 с помощью влияющих на луч линзовых элементов 614, 615 для достижения уменьшенного угла 509 раствора радарных сигналов.
На фиг.7 показан другой вариант осуществления радарного устройства для применения в автоматизации производства и/или логистики или технике безопасности. Предлагаемое измерительное устройство 701 отличается от ранее представленной конструкции применением комбинированной передающей и приемной антенны 703, которая благодаря высокой рабочей частоте больше 200 ГГц реализуется предпочтительно на полупроводниковой подложке 612 интегрированного радарного чипа. Дополнительный передающий/приемный разделительный фильтр 702, который тоже интегрирован на чипе 612, служит для разделения сигналов. Опционально и в этом случае может достигаться уменьшение угла 509 раствора измерительного устройства, когда непосредственно на чипе в области первичного излучателя 703 устанавливается влияющий на луч линзовый элемент 704. В настоящем примере, кроме того, предусматривается также совместная интеграция PLL 601, ADC (англ. analog-to-digital converter, аналого-цифровой преобразователь) 611, а также аналогового фильтра 610 в радарный чип 705, например, путем монтажа различных конструктивных узлов в одном общем узле 705. Может быть также предусмотрено интегрирование ранее названных конструктивных узлов непосредственно на одной единственной полупроводниковой подложке 612. Последние названные варианты осуществления приводят к ощутимому уменьшению стоимости построения такой системы.
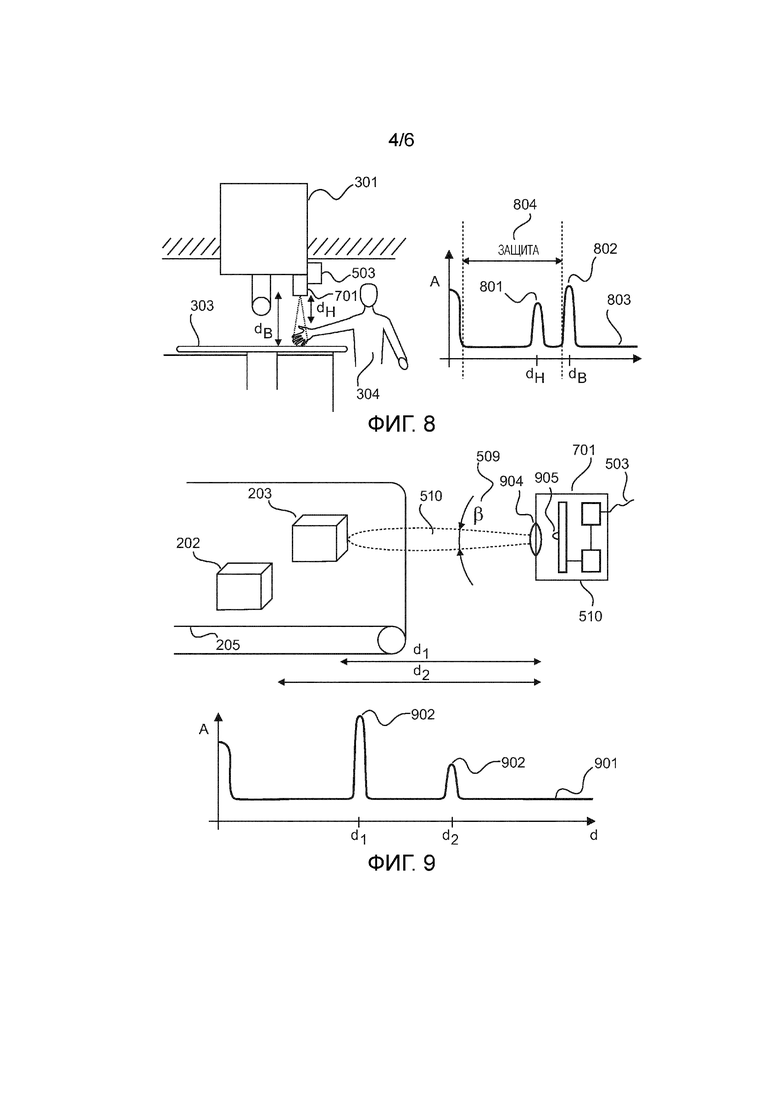
Фиг.8 поясняет преимущества при применении в области техники безопасности. Радарное измерительное устройство 701, имеющее вышеназванные признаки, мониторит опасную область под штамповочной машиной 301. Благодаря чрезвычайно высокому разрешению радара в несколько миллиметров теперь впервые при проникновении руки пользователя 304 в опасную область становится возможной регистрация соответствующего отражения 801 на регистрируемой измерительным устройством 701 эхо-кривой 803 и надежное отличие его от отражения 802 листового материала 303. Измерительное устройство 701 в другом варианте осуществления при имплементации надлежащей защитной функции, например, в процессор 704, может быть оснащено таким образом, чтобы оно мониторило по меньшей мере параметрируемую опасную область SAFE 804, и при обнаружении какого-либо объекта в этой области инициировало целенаправленную, критическую защитную реакцию в реальном времени. Это может осуществляться путем передачи соответствующего сигнала через устройство 503 связи непосредственно в машину. Но может быть также предусмотрено интегрирование непосредственно в измерительное устройство 701 соответствующих схемных элементов, например, принудительно управляемых реле. В зависимости от достигаемого уровня безопасности, может быть также предусмотрено редундантное осуществление радарного измерения, например, путем встраивания в измерительное устройство 701 нескольких радарных чипов.
На фиг.9 показано применение вышеописанного измерительного устройства для автоматизации производства и логистики. Благодаря применению по меньшей мере двух фокусирующих элементов 904, 905 генерируемый измерительным устройством 503 радарный сигнал фокусируется таким образом, что он имеет угол 509 раствора в несколько градусов. Благодаря этому устройство путем соответствующей ориентации может приводиться в положение точного определения положения посылки 203 в направлении 510 его луча. При применении нескольких датчиков 701 или при применении отклоняющего луч элемента может также мониториться расширенная область конвейерной ленты 205 и точно определяться позиция и положение посылок 202, 203. Посредством быстрого, обладающего возможностью работы в реальном времени устройства 503 связи возможно эффективное управление сортировочной установкой. Регистрируемая измерительным устройством 701 эхо-кривая 901 благодаря высокому разрешению радара в несколько миллиметров может надежно разделять отражаемые сигналы 902, 903 даже расположенных близко рядом друг с другом посылок 202, 203.
На фиг.10A показан радарный датчик 1000, имеющий цилиндрический корпус. На заднем конце корпуса 1001 предусмотрен электрический разъем, например, для подключения к двухпроволочному проводу 4-20 мА или к IO-Link-интерфейсу, штекер подключения которых, например, навертывается на задний конец корпуса.
Средняя часть корпуса 510 имеет шестигранник 513 для ввертывания, к которому присоединяется упор 514 для ввертывания, за которым следует ввертываемая резьба 511 для ввертывания в крепление или отверстие емкости. Эта ввертываемая резьба 511 имеет диаметр в половину дюйма или меньше. Во ввертываемой резьбе может, например, находиться радарная линза и/или антенна для излучения/приема измерительных сигналов.
Обычно длина (или, соответственно, «высота») корпуса составляет максимум 100 мм.
Вариант осуществления фиг.10B во многих отношениях соответствует варианту осуществления фиг.10A. Однако ввертываемая резьба 511 находится в средней области корпуса 510, за ней следует упор 514 и шестигранник 513 для ввертывания.
В варианте осуществления в соответствии с фиг.11 тоже предусмотрена ввертываемая резьба 511 в средней области корпуса 510, при этом диаметр корпуса составляет ≤22 мм. Может быть предусмотрено ввертывание радарного датчика в соответствии с фиг.11 непосредственно в резьбовое гнездо машины и законтривание контргайкой. Однако может быть также предусмотрено ввертывание радарного датчика в резьбовое гнездо машины, образующее глухое отверстие. Передний конец датчика 511 в области радарной линзы в смонтированном состоянии плоско прилегает к проницаемой для микроволновых сигналов поверхности дна глухого отверстия машины. При завертывании датчика в глухом отверстии за счет притягивания к поверхности дна может достигаться надежное крепление. Может быть предусмотрено, чтобы датчик 511 имел шестигранное гнездо для упрощения завертывания.
На фиг.12A показан радарный датчик 1200, имеющий корпус 510 в форме прямоугольного параллелепипеда. Высота корпуса составляет 5 см, ширина 2 см, а глубина тоже 5 см. В передней области корпуса расположена линза 513. В нижней области находится электрический разъем 1201. Корпус состоит, например, из полиэтилена или полипропилена.
На фиг.13A показана так называемая защитная решетка 1300 радара, которая имеет множество радарных чипов 506, 1301-1305. Каждый радарный чип имеет собственную первую, расположенную в области элемента излучателя линзу 512 и «корпусную» линзу 513, которая расположена по ходу луча первой линзы.
Благодаря множеству радарных чипов обеспечивается редундантность, которая может быть предпочтительна, в частности, для критических в отношении безопасности случаев применения.
На фиг.13B показана каскадная конструкция радарного датчика из отдельных модулей. Каждый отдельный модуль в этом варианте осуществления имеет два радарных чипа 506, 1301 или, соответственно, 1302, 1303, имеющих снова по одной первой линзе 512 и одной второй линзе 513 в стенке корпуса. Каждый модуль имеет входной интерфейс 1305 и выходной интерфейс 1306, через которые возможно электронное соединение этих модулей друг с другом.
С помощью описанных вариантов осуществления впервые можно заменить оптические способы измерения в области автоматизации производства, автоматизации логистики и техники безопасности регистрацией результатов измерений на базе радара и тем самым, в частности, благодаря присущей, положительно влияющей нечувствительности радарной измерительной технологию к загрязнениям снизить издержки технического обслуживания. Кроме того, благодаря переходу к частотам выше 2000 ГГц могут значительно сокращаться размер и стоимость датчиков, чем может обеспечиваться адекватная замена оптических датчиков.
В дополнение следует указать, что «включающий в себя» и «имеющий» не исключает наличия других элементов или этапов, и неопределенные артикли «какая-либо» или «какой/какое-либо» не исключают множества. Далее, следует указать, что признаки или этапы, которые были описаны со ссылкой на один из вышеприведенных примеров осуществления, могут также применяться в комбинации с другими признаками или этапами других вышеописанных примеров осуществления. Ссылочные обозначения в пунктах формулы изобретения не должны считаться ограничениями.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДАРНЫЙ МОДУЛЬ С ДВОЙНЫМ РЕБРОМ | 2020 |
|
RU2780644C1 |
| РАДАРНЫЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2019 |
|
RU2777143C1 |
| РАДАРНЫЙ ЧИП С ПОЛЫМ ВОЛНОВОДНЫМ УСТРОЙСТВОМ ВВОДА | 2020 |
|
RU2829600C1 |
| ДЕТЕКТОР ЭЛЕМЕНТОВ КАРКАСА СО СХЕМОЙ РЕГУЛИРОВАНИЯ | 2013 |
|
RU2625440C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО, УСТРОЙСТВО УПРАВЛЕНИЯ И ИЗМЕРИТЕЛЬНЫЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ НАПОЛНЕНИЯ | 2010 |
|
RU2552573C2 |
| СИСТЕМА РАДАРНОГО УРОВНЕМЕРА МАЛОЙ МОЩНОСТИ | 2015 |
|
RU2667351C2 |
| СИСТЕМА ДЛЯ ФОТОТЕРАПИИ, ВКЛЮЧАЮЩАЯ ОПРАВЫ ОЧКОВ И КОНТАКТНЫЕ ЛИНЗЫ | 2012 |
|
RU2580983C2 |
| РАДАРНЫЙ ДЕТЕКТОР ДЛЯ РАСПОЗНАВАНИЯ ДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2637493C1 |
| СИСТЕМА РАДАРНОГО УРОВНЕМЕРА МАЛОЙ МОЩНОСТИ, СОДЕРЖАЩАЯ ИНТЕГРАЛЬНУЮ СХЕМУ СВЧ | 2015 |
|
RU2678186C2 |
| ОЧКИ ДЛЯ ФОТОТЕРАПИИ | 2012 |
|
RU2600223C2 |
Изобретение относится к радарному датчику для автоматизации производства и логистики. Техническим результатом является обеспечение миниатюризации измерительной системы в сочетании с высоким разрешением радара. Упомянутый технический результат достигается тем, что радарный датчик имеет радарную схемную систему, которая имеет радарный чип для создания, излучения, приема и оценки радарных измерительных сигналов, имеющий угол раствора меньше 5°, радарный чип имеет площадь поперечного сечения меньше 1 см2 и создает радарные измерительные сигналы, имеющие частоту свыше 200 ГГц, при этом ширина полосы модуляции для модуляции радарных измерительных сигналов, генерируемых радарной схемной системой, составляет свыше 10 ГГц. 15 з.п. ф-лы, 16 ил.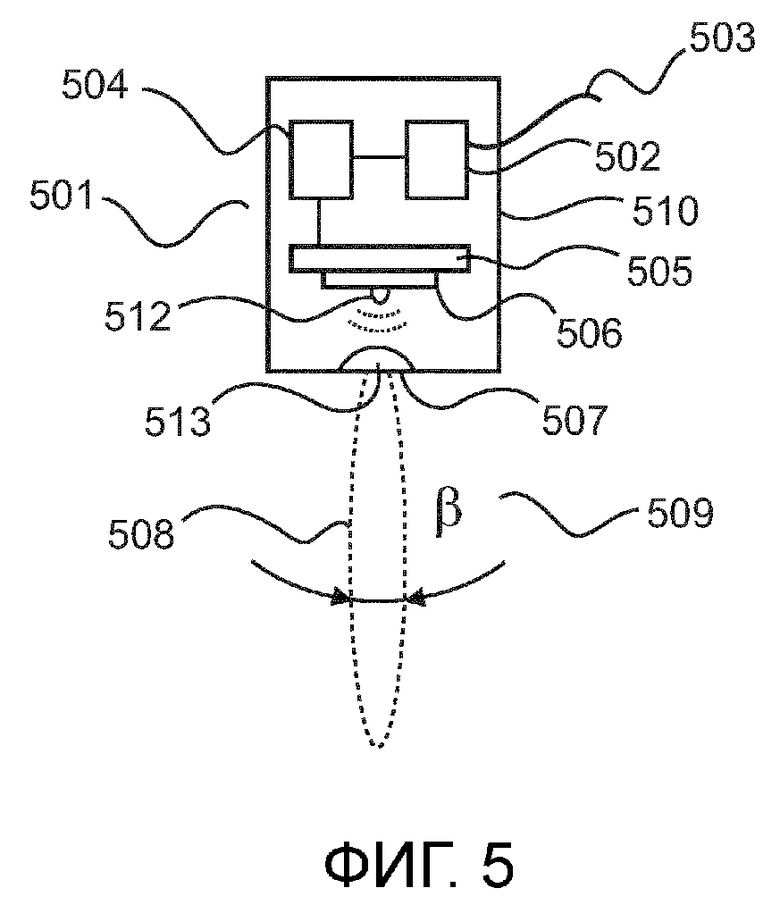
1. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) для автоматизации производства и логистики, содержащий:
радарную схемную систему (505) с радарным чипом (506, 612), выполненную для генерирования, излучения, приема и оценки радарных измерительных сигналов;
корпус (510), в котором расположена радарная схемная система (505), и при этом радарный чип имеет площадь поперечного сечения меньше 1 см2;
при этом радарные измерительные сигналы имеют частоту свыше 160 ГГц и сфокусированы таким образом, что результирующий угол раствора луча составляет меньше 5°,
причем корпус (510) является цилиндрическим и содержит ввертываемую резьбу (511) для ввертывания корпуса в крепление или отверстие емкости,
при этом ширина полосы модуляции для модуляции радарных измерительных сигналов, генерируемых радарной схемной системой (505), составляет свыше 10 ГГц.
2. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по п.1,
при этом радарный чип (506, 612) имеет площадь поперечного сечения меньше 0,25 см2.
3. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по п.1 или 2,
при этом корпус (510) имеет ширину максимум 2 см, высоту максимум 5 см и глубину максимум 5 см.
4. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом ввертываемая резьба (511) имеет диаметр максимально 1,91 см или 0,75 дюйма.
5. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом частоты генерируемых радарных измерительных сигналов лежат между 231,5 ГГц и 250 ГГц.
6. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом корпус (510) содержит первую линзу (507), выполненную для фокусирования излучаемых радарных измерительных сигналов.
7. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по п.6,
при этом первая линза (507) имеет диаметр 20 мм или меньше.
8. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом радарная схемная система (505) содержит вторую линзу (512), выполненную для фокусирования излучаемых радарных измерительных сигналов.
9. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по п.8,
при этом вторая линза (512) имеет диаметр 10 мм или меньше.
10. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по п.8 или 9,
при этом вторая линза (512) находится на расстоянии от 5 мм до 50 мм от радарного чипа (506, 612) и/или первой линзы (507).
11. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом радарный чип (506, 612) имеет интегрированную в него антенну (607).
12. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
содержащий схему (502) связи,
при этом радарный датчик выполнен с возможностью регистрировать изменения физической измеряемой величины в реальном времени, то есть регистрировать их надежно в пределах предопределенного промежутка времени, и передавать их посредством схемы (502) связи.
13. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов,
при этом радарный датчик содержит несколько независимых каналов передачи/приема и/или несколько радарных чипов (506, 1301, 1302, 1303, 1304, 1305, 1306).
14. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов, содержащий:
двухпроводной интерфейс (106) 4-20 мА, выполненный для передачи результатов измерений во внешнюю систему (110) управления процессом и для приема энергии, необходимой для эксплуатации радарного датчика.
15. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов, выполненный в виде радара уровня наполнения.
16. Радарный датчик (100, 102, 103, 501, 701, 1000, 1100, 1200) по любому из предыдущих пунктов, имеющий штекерный разъем (511, 513, 514), выполненный для монтажа радарного датчика с помощью накидного ключа в снабженном внутренней резьбой отверстии емкости.
| DE 102017114686 A1, 03.01.2019 | |||
| СИСТЕМА ДЛЯ ИЗГОТОВЛЕНИЯ ИМЕЮЩЕГО МОДУЛЬНУЮ КОНСТРУКЦИЮ УСТРОЙСТВА ДЛЯ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ В ТЕХНОЛОГИЧЕСКОМ ПРОЦЕССЕ И УНИФИЦИРОВАННЫЕ КОМПОНЕНТЫ | 2003 |
|
RU2342639C2 |
| DE 102016109910 B4, 07.12.2017 | |||
| M | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| ВОЛНОМЕР | 1922 |
|
SU4552A1 |
| DE 102008049869 A1, | |||

