Область техники, к которой относится изобретение
Настоящее изобретение относится к системе, которая предназначена для изготовления имеющего модульную конструкцию устройства для определения физической величины в технологическом процессе и работа по меньшей мере двух компонуемых из входящих в состав которой модулей устройств основана на различных принципах измерения. Изобретение относится также к устройству для определения физической величины среды в технологическом процессе, имеющему по меньшей мере один блок, который выполнен унифицированным для возможности его использования по меньшей мере в двух различных устройствах для определения физической величины среды, которыми физическая величина определяется на основе двух различающихся между собой принципов измерения. Изобретение относится далее к отдельным унифицированным блокам или компонентам либо модулям для компоновки подобного устройства.
Предпосылки создания изобретения
Устройство для определения физической величины среды в технологическом процессе обычно называют также датчиком. Подобные датчики широко используются в различных технологических процессах для получения информации о них. При этом в зависимости от конкретной физической величины, соответственно получаемой информации используют различные принципы измерения.
В этом отношении необходимо отметить, что под "физической величиной" согласно настоящему изобретению подразумевается, например, уровень некоторой среды в емкости, давление некоторой среды в емкости, расход некоторой среды в трубопроводе, температура, плотность либо влажность или любой иной параметр некоторой среды, зависящий от ее свойств и характеризующий их. Однако настоящее изобретение не ограничено определением конкретно указанных выше физических величин, а относится к устройствам для определения и других физических величин в технологическом процессе.
Принципы измерения можно согласно настоящему изобретению подразделить в основном на методы непрерывного измерения и методы измерения предельного значения, в частности, предельного уровня.
К методам непрерывного измерения относятся основанные на использовании ультразвуковых волн или микроволн, емкостные и основанные на определении давления методы измерения. К методам измерения предельного значения относятся вибрационные и емкостные методы измерения. Получаемая при измерениях этими известными как таковыми методами информация используются в основном для контроля технологического процесса, управления им и его регулирования. Так, например, уровень материала, соответственно содержимого емкости можно определять емкостным измерением уровня, гидростатическим измерением уровня, ультразвуковым измерением уровня, радиолокационным измерением уровня, измерением уровня с помощью пропускаемых по волноводу микроволн, вибрационным измерением уровня и кондуктометрическим измерением уровня.
При емкостном измерении уровня содержимое емкости и сама емкость образуют совместно с измерительным зондом электрический конденсатор. Уровень заполнения емкости определяется измерением электрической емкости такого конденсатора.
Гидростатическое измерение уровня заключается в следующем. Гидростатическое давление повышается с увеличением высоты столба жидкости. Измеренная величина давления используется измерительным преобразователем давления для определения уровня заполнения емкости. Для выполнения измерений этим методом наиболее пригодны измерительные преобразователи давления со способными выдерживать перегрузку металлическими или керамическими измерительными ячейками.
При бесконтактном ультразвуковом измерении уровня формируют ультразвуковые импульсы. При этом пьезокерамический ультразвуковой преобразователь периодически излучает звуковые импульсы, отражающиеся от поверхности содержимого емкости. Уровень заполнения определяется комбинированной приемной и передающей системой на основе измеренного времени задержки между излученной и принятой отраженной звуковой волной.
При измерении уровня с помощью пропускаемых по волноводу микроволн высокочастотные микроволновые импульсы или электрические импульсы пропускают по стальному тросу. Достигнув поверхности содержимого емкости, импульсы отражаются от поверхности содержимого емкости. Время задержки между излученным и принятым отраженным импульсом анализируется интегральной электроникой и пересчитывается в уровень заполнения емкости. Измерение, выполняемое подобным методом, часто называют также динамической рефлектометрией (ДРМ).
При радиолокационном измерении уровня определяют время задержки между излучением и приемом очень коротких микроволновых импульсов. Это время является мерой уровня заполнения емкости. Отражателем при этом служит поверхность содержимого емкости.
При измерении уровня с помощью вибрации вибродатчик пьезоэлектрически приводят в колебания. В момент касания с содержимым емкости колебания затухают. На основе этого измерительная электроника фиксирует достижение предельного уровня.
При кондуктометрическом измерении уровня в момент контакта содержимого емкости с измерительным зондом замыкается электрическая цепь и выдается соответствующая команда, свидетельствующая о срабатывании измерительного зонда. Принцип кондуктометрического измерения используется для экономичного определения момента достижения предельного уровня электропроводными жидкостями.
В качестве примера основанных на измерении давления методов можно назвать метод измерения абсолютного давления среды в технологическом процессе или метод измерения разности давлений. При измерении абсолютного давления давление в трубопроводах или емкостях измеряют с помощью безмасляной металлической или керамической измерительной ячейки и результат измерения преобразуют, например, в сигнал тока силой от 4 до 20 мА. При измерении разности давлений ее определяют с помощью измерительных ячеек из керамики или элементарного кремния и преобразуют в сигнал тока силой предпочтительно от 4 до 20 мА.
Резюмируя сказанное выше, методы измерения по лежащим в их основе принципам измерения можно в контексте настоящего описания классифицировать, например, следующим образом: а) измерение времени задержки между свободно излучаемыми или пропускаемыми по волноводу и принимаемыми отраженными от содержимого емкости электромагнитными волнами, например, микроволнами или ультразвуковыми волнами, б) измерение электрической емкости содержимого емкости, в) измерение гидростатического давления или гидростатического перепада давлений, г) определение предельного уровня с помощью вибрации или кондуктометрическим путем, д) измерение температуры и е) измерение расхода.
Подобный датчик для выполнения специальных задач, а также с учетом условий его применения должен удовлетворять определенным требованиям, соответственно отвечать определенным промышленным стандартам. Такими стандартами определяются требования к стойкости датчиков к тяжелым окружающим условиям, преобладающим на производстве, соответственно к анализируемым средам. Другое требование, предъявляемое к датчикам, состоит в легкости и простоте их монтажа и возможности их легкой и простой адаптации к конкретному технологическому процессу. Помимо этого существуют также требования, относящиеся к электрическому подключению датчиков, выводу полученной информации и соблюдению определенных норм безопасности, например, норм взрывозащиты.
Необходимостью соответствия этим и другим стандартам обусловлена определенная принципиальная функциональная конструкция датчика каждого конкретного типа, характеризующаяся наличием определенных функциональных блоков. К подобным функциональным блокам в каждом случае относятся помимо прочего (первичный) измерительный преобразователь, электронный блок, блок обработки, блок связи, блок электропитания, крепежный блок, называемый также присоединением (обеспечивающим сопряжение датчика с объектом измерения в технологическом процессе), а также корпус.
Измерительный преобразователь, работа которого основана на механическом или электромеханическом принципе, соответственно содержащийся в нем чувствительный элемент, непосредственно или опосредованно контактируя с анализируемой средой, преобразует физическую измеряемую величину в электрическую. Полученный таким путем электрический измерительный сигнал, характеризующий конкретную измеряемую физическую величину, соответственно пропорциональный ей, подвергается затем дальнейшей обработке в электронном блоке. Такой электронный блок представляет собой специфический для конкретного типа датчиков схемный блок, который поэтому требуется согласовывать с каждым конкретным типом чувствительных элементов. Выполняемая электронным блоком обработка пропорционального измеряемой физической величине электрического сигнала может заключаться, например, в его усилении, фильтрации или преобразовании в цифровой измерительный сигнал.
К выходу электронного блока подключен блок обработки, который на основе подготовленного электронным блоком измерительного сигнала формирует необходимую информацию о физической величине, характеризующей анализируемую среду. Полученное таким путем измеренное значение передается от датчика через подключенный к выходу блока обработки блок связи в систему управления процессом, например, по полевой шине или двухпроводному контуру. Измерительный преобразователь, электронный блок, блок обработки и блок связи часто размещены в общем корпусе и запитываются от размещенного в этом же корпусе блока электропитания. Корпус, соответственно все устройство можно с помощью крепежного блока, называемого также присоединением, закреплять на емкости или стенке.
Каждый датчик должен, как уже говорилось выше, соответствовать определенной концепции безопасности, охватывающей все эти функциональные блоки. Поэтому для каждого датчика требуется разрабатывать концепцию безопасности, учитывающую особенности различных компонентов датчика, соответственно их исполнение.
Большим разнообразием измеряемых физических величин и, как следствие, используемых для их измерения методов, обеспечивающих преобразование физических величин в электрические данные, обусловлена обычная на сегодняшний день практика разработки и изготовления специального, предназначенного для решения каждой конкретной задачи измерения датчика, имеющего индивидуальную конструкцию и оснащенного специально рассчитанными на решение конкретной задачи измерения функциональными блоками и механическими компонентами. Подобный индивидуальный и узкоспециализированный подход к разработке и изготовлению измерительных приборов позволяет создавать датчики, оптимально приспособленные к решению стоящей перед ними задачи измерения и к условиям их применения.
Существенный недостаток, который может быть связан с таким подходом, состоит в высоких затратах на разработку каждого датчика и в отчасти очень большом количестве различных компонентов и функциональных блоков, появление которых влечет за собой разработка каждого нового поколения датчиков. Однако из-за этих высоких расходов на разработку датчиков изготовителям, которые специализируются на выпуске не одного единственного датчика, а целой гаммы возможно сходных по назначению, но все же различающихся между собой датчиков, приходится сталкиваться с проблемой слишком высоких издержек. Большое разнообразие отдельных компонентов и функциональных блоков может привести к увеличению расходов и со стороны потребителей подобного рода продукции, когда, например, для каждого датчика требуется его обслуживание по индивидуальной схеме или индивидуальная система крепления.
В этом отношении можно было бы сослаться на патент US 6295874 В1 или соответствующую ему публикацию WO 01/18502 А1, из которых известно устройство для определения физической величины методом, основанным на измерении времени задержки между излученным и принятым отраженным сигналами. Описанное в этих публикациях устройство может содержать блок обработки, который по существу должен быть не зависимым от используемого датчика. Из этого документа со всей очевидностью следует, что лежащий в основе работы предлагаемого в нем датчика принцип основан исключительно на измерении времени задержки между излученным и принятым отраженным сигналами. Помимо этого в указанной публикации предлагается также не зависимый от конкретно используемого датчика блок связи для обмена данными с удаленной системой управления процессом. Однако и в этом случае можно со всей очевидностью констатировать, что подобный блок связи предназначен для работы в сочетании с датчиком одного единственного типа, лежащий в основе работы которого принцип основан на измерении времени задержки между излученным и принятым отраженным сигналами.
В проспекте фирмы Krohne, Германия, представлен радиолокационный датчик уровня, конструкцию которого можно было бы рассматривать как модульную. У такого радиолокационного датчика уровня различные измерительные преобразователи, такие как рупорная антенна, волновод или стержневой излучатель, можно комбинировать с использованием промежуточной детали с двумя различными корпусами с соответствующей электроникой. Однако и в этом случае согласно пониманию авторами настоящего изобретения технического существа вопроса возможна лишь некоторая гибкость в компоновке радиолокационного датчика уровня.
Помимо этого из статьи автора Rolf Hauser, озаглавленной "Lego fur Erwachsene" и опубликованной в журнале "Messtek, Steuern, Regein, Automatisieren, Messen" за август 1999 г., известна связанная с повышением удобства пользования интеллектуальной системой управления интеграция полностью безмасляных измерительных ячеек в модульную систему, состоящую из присоединений (крепежных блоков), корпусов, различного типа устройств передачи сигналов и согласующих звеньев. В указанной статье описаны различные датчики давления, которые можно комбинировать с различными корпусами. Однако и в этом случае все говорит о том, что модульный принцип построения датчиков ограничивается только датчиками, в основе работы которых лежит один единственный принцип измерения.
Краткое изложение сущности изобретения
Первым объектом настоящего изобретения является предлагаемая в нем система, которая предназначена для изготовления различных версий имеющего модульную конструкцию устройства для определения физической величины в технологическом процессе и работа по меньшей мере двух компонуемых из входящих в состав которой модулей устройств основана на различных принципах измерения. Такая система может содержать несколько измерительных преобразователей, каждый из которых предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал и по меньшей мере два из которых различаются между собой лежащим в основе их работы принципом измерения, по меньшей мере один блок обработки, который предназначен для обработки и формирования характеризующего физическую величину сигнала на основе измерительного сигнала, выдаваемого измерительным преобразователем, и который выполнен унифицированным для возможности соединения с одним или несколькими измерительными преобразователями, по меньшей мере один блок связи, который предназначен для выдачи характеризующего физическую величину сигнала и выполнен унифицированным для возможности соединения с одним или несколькими блоками обработки, по меньшей мере один блок электропитания, который служит для запитывания устройства для определения физической величины и который выполнен унифицированным для возможности запитывания по меньшей мере двух версий имеющего модульную конструкцию устройства, по меньшей мере один корпус, который выполнен унифицированным для возможности размещения в нем по меньшей мере нескольких блоков из группы, включающей по меньшей мере блок обработки, блок связи и блок электропитания, и несколько крепежных блоков, которые предназначены для закрепления устройства для определения физической величины на емкости или стенке и которые различаются между собой своим исполнением, учитывающим заданные условия закрепления устройства для определения физической величины на емкости или стенке.
В одном из вариантов выполнения предлагаемой в настоящем изобретении системы она содержит также по меньшей мере один электронный блок, предназначенный для электронного преобразования электрического измерительного сигнала, выдаваемого измерительным преобразователем, в цифровой измерительный сигнал. При этом по меньшей мере один из электронных блоков может быть выполнен унифицированным для возможности соединения по меньшей мере с двумя различающимися между собой, прежде всего лежащими в основе их работы принципами измерения, измерительными преобразователями.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы электронный блок и блок обработки объединены в один модуль.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы электронный блок и блок обработки размещены на одной или нескольких платах.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы по меньшей мере один корпус выполнен унифицированным для возможности размещения в нем по меньшей мере нескольких блоков из группы, включающей по меньшей мере электронный блок, блок обработки, блок связи и блок электропитания.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы среди различающихся между собой измерительных преобразователей, предназначенных для определения физической величины, имеется по меньшей мере два различающихся между собой измерительных преобразователя, в основе работы каждого из которых лежат разные принципы измерения, как, например, измерение времени задержки между свободно излученными или распространяющимися по волноводу и отраженными от содержимого емкости электромагнитными волнами, такими как микроволны или ультразвуковые волны, измерение электрической емкости содержимого емкости, измерение гидростатического давления или гидростатического перепада давлений, измерение предельного уровня, измерение температуры, измерение расхода.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы она содержит несколько корпусов, каждый из которых имеет индивидуальное исполнение, зависящее от конкретного назначения, но выполнен унифицированным для возможности соединения с любым из измерительных преобразователей.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы корпуса различаются между собой материалом, из которого они изготовлены.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы корпуса различаются между собой исполнением присоединительных частей (разъемов) для дистанционной передачи данных.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы отдельные измерительные преобразователи среди всего их числа имеют индивидуальное исполнение, зависящее от конкретного назначения, но выполнены унифицированными для возможности соединения с любым из блоков обработки.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы несколько измерительных преобразователей выбираются из группы, включающей несколько следующих измерительных преобразователей:
а) рупорную антенну с соответствующей электроникой для излучения и приема ультразвуковых волн или микроволн,
б) штыревую антенну с соответствующей электроникой для излучения и приема ультразвуковых волн или микроволн,
в) стержневой или тросовый зонд с соответствующей электроникой,
г) колебательную вилку с соответствующей электроникой,
д) емкостной измерительный зонд с соответствующей электроникой,
е) измерительный преобразователь температуры с соответствующей электроникой и
ж) измерительный преобразователь давления с соответствующей электроникой.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы блок связи выполнен с возможностью обеспечения цифровой связи с шинной системой.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы блок связи выполнен с возможностью обеспечения цифровой связи по двухпроводному контуру.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы она содержит несколько блоков электропитания, которые имеют индивидуальное исполнение для подсоединения к двухпроводному контуру, четырехпроводному контуру или цифровой шинной системе и имеют унифицированные размеры для подсоединения к одной из версий имеющих модульную конструкцию устройств.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы один из блоков электропитания выполнен с возможностью подачи на подключенные к его выходу блоки напряжения величиной 3, 5 или 15 вольт.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы она содержит также блок индикации и ручного управления, выполненный с возможностью его съемного закрепления по меньшей мере на нескольких различающихся между собой корпусах и имеющий для этого соответствующее унифицированное исполнение.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы блок индикации и управления имеет крепежное устройство, выполненное с возможностью его соединения с ответным унифицированным крепежным устройством на корпусах, и электрическое соединительное устройство, выполненное с возможностью его подсоединения к соответствующему ему ответному электрическому соединительному устройству на корпусах.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы блок индикации и управления выполнен с возможностью его съемного закрепления в различных положениях или в различной ориентации на корпусах.
В следующем варианте выполнения предлагаемой в настоящем изобретении системы один или несколько программных модулей, предназначенных для управления одним из блоков из группы, включающей по меньшей мере электронный блок, блок обработки, блок связи и блок электропитания, унифицированы для применения по меньшей мере в двух различных версиях имеющего модульную конструкцию устройства для определения физической величины.
Вторым объектом настоящего изобретения является предлагаемое в нем устройство для определения физической величины в технологическом процессе, содержащее измерительный преобразователь, предназначенный для регистрации определяемой физической величины и ее преобразования в электрический измерительный сигнал, блок обработки, предназначенный для обработки и формирования характеризующего физическую величину сигнала на основе электрического измерительного сигнала, выдаваемого измерительным преобразователем, блок связи, предназначенный для выдачи характеризующего физическую величину сигнала, блок электропитания, служащий для запитывания устройства для определения физической величины, корпус, предназначенный для размещения в нем по меньшей мере нескольких блоков из группы, включающей блок обработки, блок связи и блок электропитания, и крепежный блок, предназначенный для закрепления устройства для определения физической величины на емкости или стенке. При этом по меньшей мере один блок из группы, включающей блок обработки, блок связи, блок электропитания, корпус и крепежный блок, выполнен унифицированным для возможности его применения в устройствах для определения физической величины, имеющих разные измерительные преобразователи, различающиеся между собой лежащим в основе их работы принципом измерения.
В одном из вариантов выполнения предлагаемого в настоящем изобретении устройства в цепь между измерительным преобразователем и блоком обработки включен электронный блок, предназначенный для электронного преобразования электрического измерительного сигнала, выдаваемого измерительным преобразователем, в цифровой измерительный сигнал.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства унификация различных его блоков заключается в унификации их механических присоединительных частей между собой.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства унификация различных его блоков заключается в унификации их электрических присоединительных частей (разъемов) между собой.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства предусмотрена возможность выбора блока электропитания из группы унифицированных блоков электропитания, включающей по меньшей мере один блок электропитания для подключения к двухпроводному контуру, один блок электропитания для подключения к четырехпроводному контуру и один блок электропитания для подключения к цифровой шинной системе, при этом такие различные блоки электропитания имеют унифицированные размеры для подсоединения к одной из версий имеющих модульную конструкцию устройств.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства его корпус имеет разъем с электрическими и механическими соединительными элементами, в котором съемно закрепляется блок индикации и управления.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства его блок обработки выполнен унифицированным для возможности его работы с измерительными преобразователями, в основе работы которых лежат различные принципы измерения.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства его блок связи выполнен унифицированным для возможности его работы с измерительными преобразователями, в основе работы которых лежат различные принципы измерения.
В следующем варианте выполнения предлагаемого в настоящем изобретении устройства его блок связи имеет по меньшей мере один интерфейс шины IIC (обозначаемой также I2С) для возможности подключения к нему блока индикации и управления или компьютера.
Следующим объектом настоящего изобретения является предлагаемый в нем корпус устройства для определения физической величины в технологическом процессе, выполненный унифицированным для возможности его соединения с первым измерительным преобразователем и со вторым измерительным преобразователем. Первый измерительный преобразователь предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе первого принципа измерения, тогда как второй измерительный преобразователь предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе второго принципа измерения, отличного от первого принципа измерения.
Предлагаемый в изобретении корпус может быть рассчитан на размещение в нем, например, всех электрических функциональных элементов и их защиты от возможного влияния внешних факторов и воздействия окружающей среды.
В одном из вариантов выполнения предлагаемого в настоящем изобретении корпуса в нем размещено по меньшей мере несколько блоков из группы, включающей по меньшей мере блок обработки, блок связи и блок электропитания.
В следующем варианте выполнения предлагаемого в настоящем изобретении корпуса он имеет крепежное устройство для съемного закрепления блока индикации и управления.
В следующем варианте выполнения предлагаемого в настоящем изобретении корпуса его крепежное устройство выполнено с возможностью съемного закрепления блока индикации и управления в различных положениях на корпусе.
Следующим объектом настоящего изобретения является предлагаемый в нем блок обработки для устройства для определения физической величины в технологическом процессе, выполненный унифицированным для возможности его соединения с первым измерительным преобразователем и со вторым измерительным преобразователем. Первый измерительный преобразователь и в этом случае предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе первого принципа измерения, тогда как второй измерительный преобразователь предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе второго принципа измерения. При этом первый и второй принципы измерения, как указано выше, различаются между собой.
Следующим объектом настоящего изобретения является предлагаемый в нем блок связи для устройства для определения физической величины в технологическом процессе, выполненный унифицированным для возможности его соединения с первым измерительным преобразователем и со вторым измерительным преобразователем. Первый измерительный преобразователь и в этом случае предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе первого принципа измерения, а второй измерительный преобразователь предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе второго принципа измерения. Аналогичным образом первый и второй принципы измерения, как указано выше, различаются между собой.
Следующим объектом настоящего изобретения является предлагаемый в нем блок электропитания для устройства для определения физической величины в технологическом процессе, выполненный унифицированным для возможности его соединения с первым измерительным преобразователем и со вторым измерительным преобразователем. В этом случае первый измерительный преобразователь также предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе первого принципа измерения, тогда как второй измерительный преобразователь предназначен для регистрации определенной физической величины и ее преобразования в электрический измерительный сигнал на основе второго принципа измерения. Аналогичным образом первый и второй принципы измерения, как указано выше, различаются между собой.
В соответствии с первым, основным объектом настоящего изобретения в нем, таким образом, впервые предлагается универсальный, не зависящий от принципа измерения подход к модульному построению устройства для определения физической величины. В соответствии с этим предлагаемое в изобретении решение позволяет создать своего рода единую платформу для изготовления на ее основе подобных устройств, упрощающую разработку и производство самых разнообразных датчиков и их компонентов. Тем самым разработчикам и эксплуатационникам предоставляется возможность оптимально комбинировать между собой определенные блоки и модули по типу "модульной системы" в зависимости от задачи измерения, области применения, окружающих условий, а также иных граничных условий без привязки к собственно принципу измерения в отличие от существовавшей ранее практики. При этом разделение функций между отдельными блоками и модулями не обязательно должно коррелировать с делением на соответствующие программные модули.
Одно из преимуществ настоящего изобретения состоит в возможности сократить время и снизить расходы на разработку новых датчиков, что позволило бы минимизировать также издержки, связанные с изготовлением устройств для определения физической величины, в основе работы которых лежат различные принципы измерения.
Крепежный блок или присоединение может представлять собой, например, фланец или резьбу. При использовании фланца весь датчик привинчивается к соответствующему сопряженному фланцу, предусмотренному у емкости. Другим примером присоединения является наружная резьба, которой датчик ввинчивается во внутреннюю резьбу, предусмотренную у емкости, и таким путем крепится к ней. Поскольку присоединение обычно тесно взаимосвязано с корпусом, согласно настоящему изобретению впервые появляется возможность согласования между собой и унификации механических мест сопряжения или стыка обоих блоков. Однако присоединение может также являться частью корпуса или может быть прочно соединено с ним.
В или на корпусе можно разместить механический или электромеханический чувствительный элемент, который взаимодействует с анализируемой средой, характеризующую которую физическую величину требуется определять. Чувствительный элемент обычно также можно комбинировать с присоединением таким образом, чтобы он после установки датчика на емкости выступал в нее или прилегал к ее стенке. Чувствительный элемент преобразует измеряемую физическую величину анализируемой среды в электрическую измеряемую величину.
Полученный описанным выше путем измерительный сигнал, характеризующий измеряемую физическую величину и пропорциональный ей, можно передавать, например, через унифицированный интерфейс электронного блока датчика в блок обработки. Электронный блок датчика представляет собой специфический для конкретного датчика схемный компонент, и поэтому его требуется согласовывать с конкретным чувствительным элементом. Электронный блок содержит аппаратные, а также при необходимости программные средства для преобразования первичного электрического сигнала, пропорционального измеряемой величине, в унифицированный электрический измерительный сигнал, пропорциональный измеренному значению.
Для подобного преобразования первичного измерительного сигнала в унифицированный измерительный сигнал электронный блок может иметь, например, микропроцессор с соответствующей периферией (оперативным запоминающим устройством (ОЗУ), постоянным запоминающим устройством (ПЗУ), электрически стираемым программируемым ПЗУ (ЭСППЗУ), аналого-цифровым преобразователем (АЦП)), различные фильтры или усилитель. Обработка сигналов и их унификация может осуществляться, как указывалось выше, исключительно аппаратными компонентами или же - после аналого-цифрового преобразования - на цифровом уровне программными средствами, выполняемыми микропроцессором.
Поскольку большинство чувствительных элементов выдает электрический сигнал только после получения на это соответствующей команды, электронный модуль датчика инициирует их срабатывание, выдавая в качестве такой команды запускающий сигнал. Для этой цели электронный блок содержит дополнительно, например, устройство формирования сигналов, в частности генератор или передатчик.
Приведенный электронным блоком датчика к унифицированному виду измерительный сигнал преобразуется затем в блоке обработки в требуемую информацию о физической величине, которая в виде электрического сигнала передается в блок связи. Для этого в ЭСППЗУ блока обработки хранятся специфические для конкретного датчика поправочные и настроечные значения, с помощью которых микропроцессор вычисляет значение физической величины. В предпочтительном варианте такая обработка осуществляется с помощью программы, выполняемой аппаратными средствами микропроцессора.
Для калибровки датчика и его настройки под выполнение конкретной задачи измерения в него через блок связи передаются поправочные и настроечные значения, которые могут долговременно сохраняться в ЭСППЗУ.
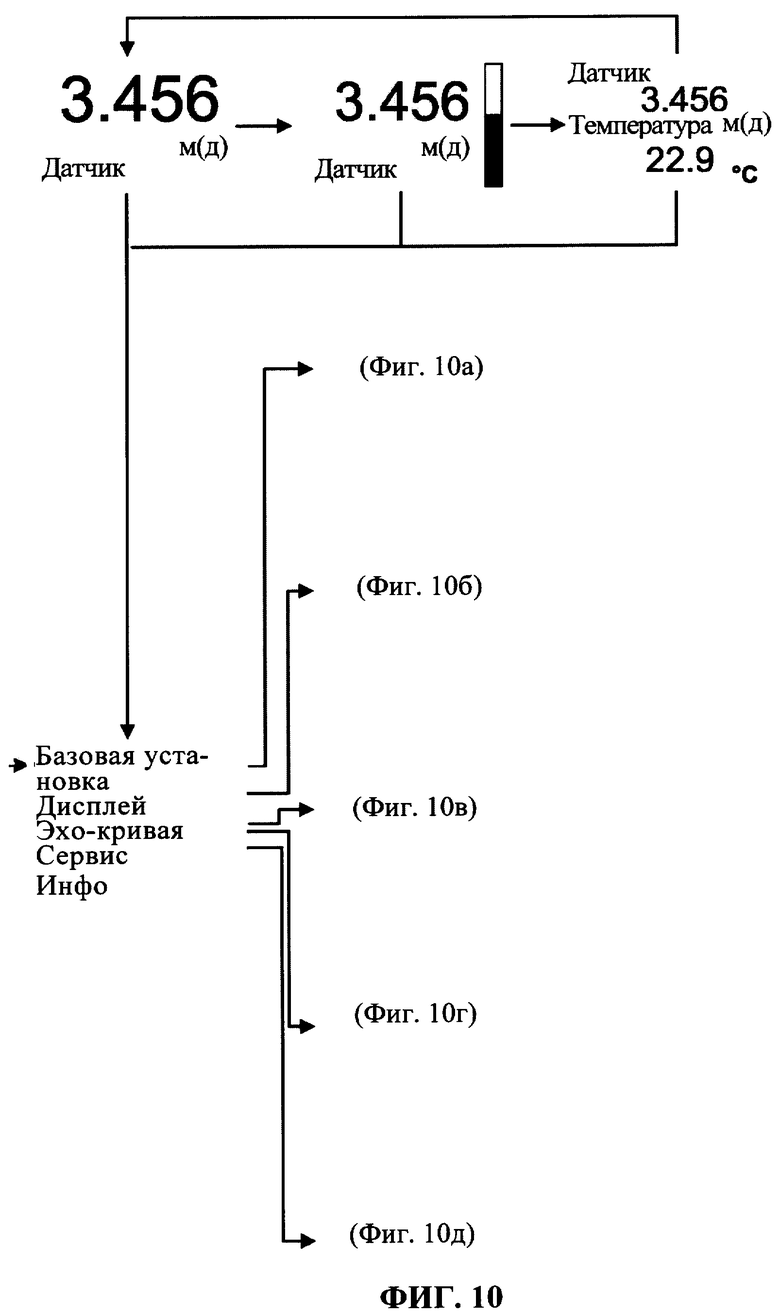
Блок связи служит для вывода требуемых данных, регистрируемых датчиком, и для ввода указанных выше поправочных и настроечных значений, соответственно для параметрирования датчика. В простейшем случае блок связи имеет визуальный индикатор, а также клавиши для ввода информации и/или команд. Однако блок связи может также иметь интерфейсы для подключения датчика к обычной полевой шине. Подобной полевой шиной датчик соединяется, например, с системой управления процессом.
Назначение блока электропитания состоит в преобразовании напряжения питающей сети, подводимого к датчику, например, от внешнего источника питания в системе управления процессом, в соответствующее стабилизированное напряжение (например, 3, 5 и 15 вольт), необходимое для работы электрических функциональных блоков датчика.
Вся конструкция датчика должна соответствовать определенным нормам безопасности, например, нормам взрывобезопасности (концепция взрывозащиты). Подобная концепция безопасности охватывает все функциональные блоки датчика и может быть реализована различными путями. Типом ее реализации определяются требования, предъявляемые к различным функциональным блокам датчика, например, требования, предъявляемые к корпусу, или требования по ограничению потребляемой электрическими схемами мощности. Так, например, предлагаемое в изобретении решение впервые позволяет соответствующим образом вне зависимости от принципа измерения унифицировать исполнение корпусов, схемных частей и т.д. с учетом подобных требований безопасности.
Особое преимущество настоящего изобретения, таким образом, состоит, например, в создании единой базы для разработки и последующего изготовления различных датчиков уровня и датчиков иного назначения благодаря возможности комбинировать каждый конкретный чувствительный элемент с требуемым присоединением и каждым конкретным корпусом. Необходимо еще раз отметить, что существенное преимущество изобретения заключается в возможности компоновать устройства, соответственно датчики, в основе работы которых лежат различные принципы измерения, из предварительно изготовленных компонентов, исполнение части которых абсолютно не зависит от конкретного принципа измерения.
Еще одно преимущество, связанное с возможностью не зависящего от принципа измерения модульного построения устройства для определения физической величины, состоит в значительном сокращении времени сборки датчика и тем самым в снижении издержек.
Помимо этого для эксплуатационника, использующего различные датчики, в том числе и те, в основе работы которых лежат различные принципы измерения, преимущество настоящего изобретения заключается в возможности придания датчикам единообразного внешнего вида и унификации соединительных разъемов датчиков и процедуры их обслуживания и управления ими.
Ниже изобретение для наглядного пояснения его сущности более подробно рассмотрено на примере нескольких вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схема унифицированной общей структуры предлагаемого в настоящем изобретении датчика,
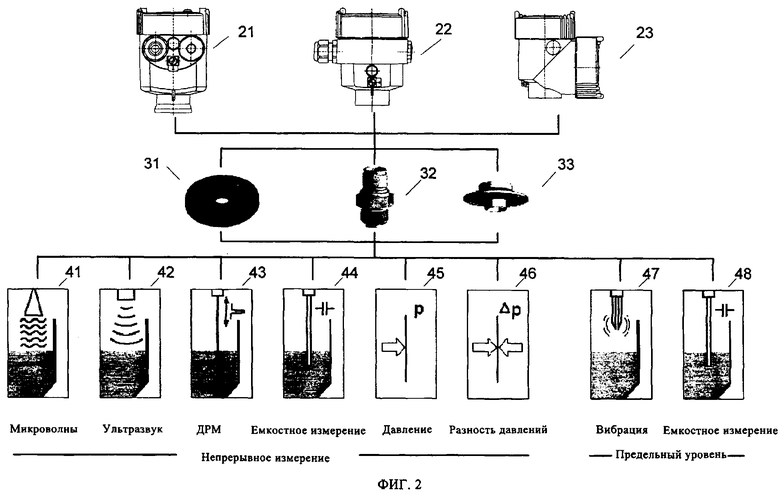
на фиг.2 - пример основного набора отдельных компонентов или блоков предлагаемой в настоящем изобретении системы,
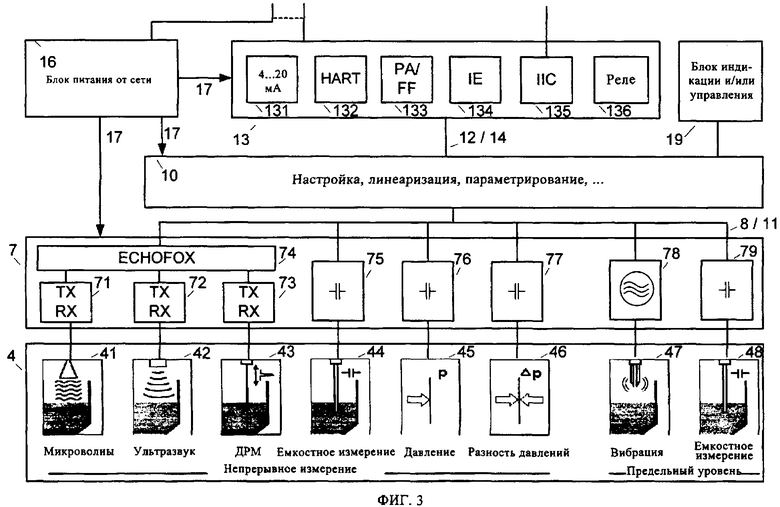
на фиг.3 - пример некоторых электрических функциональных блоков, входящих в состав предлагаемой в настоящем изобретении системы,
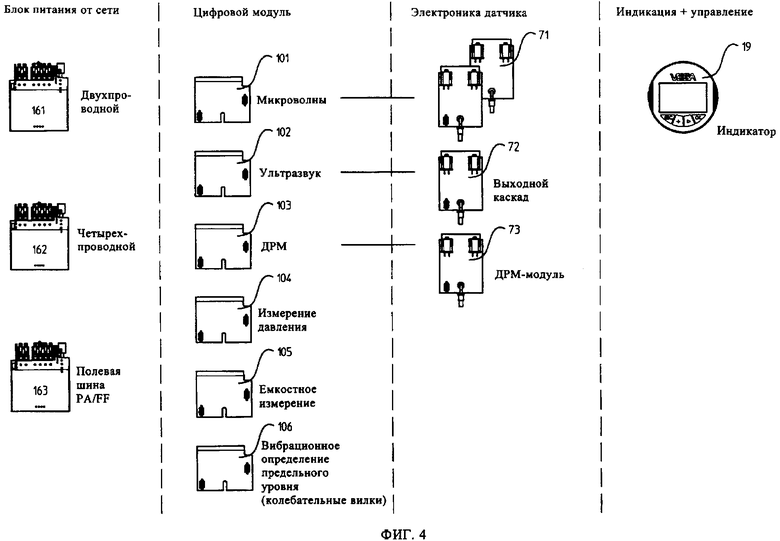
на фиг.4 - пример некоторых отдельных аппаратных компонентов, входящих в состав предлагаемой в настоящем изобретении системы,
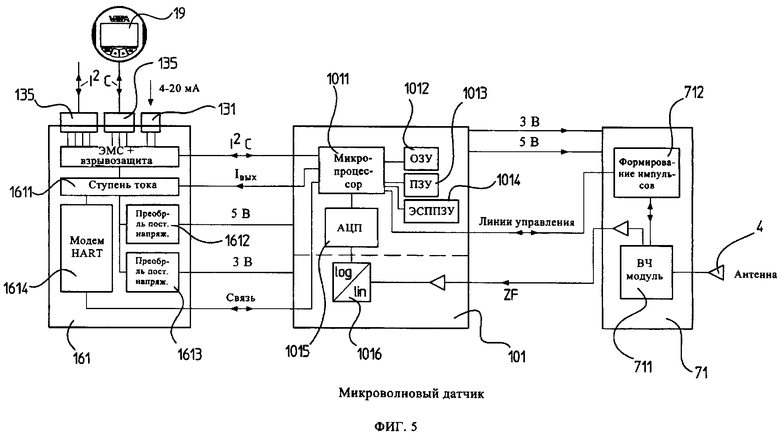
на фиг.5 - функциональная схема предлагаемого в изобретении устройства согласно одному из возможных вариантов его выполнения,
на фиг.6 - функциональная схема предлагаемого в изобретении устройства согласно другому возможному варианту его выполнения,
на фиг.7 - поэлементное изображение предлагаемого в изобретении устройства согласно следующему возможному варианту его выполнения и
на фиг.8 - продольный разрез предлагаемого в изобретении устройства согласно еще одному возможному варианту его выполнения,
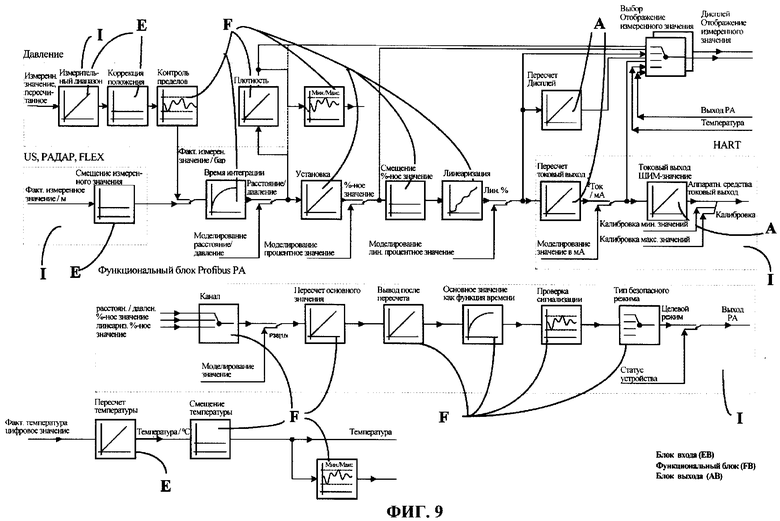
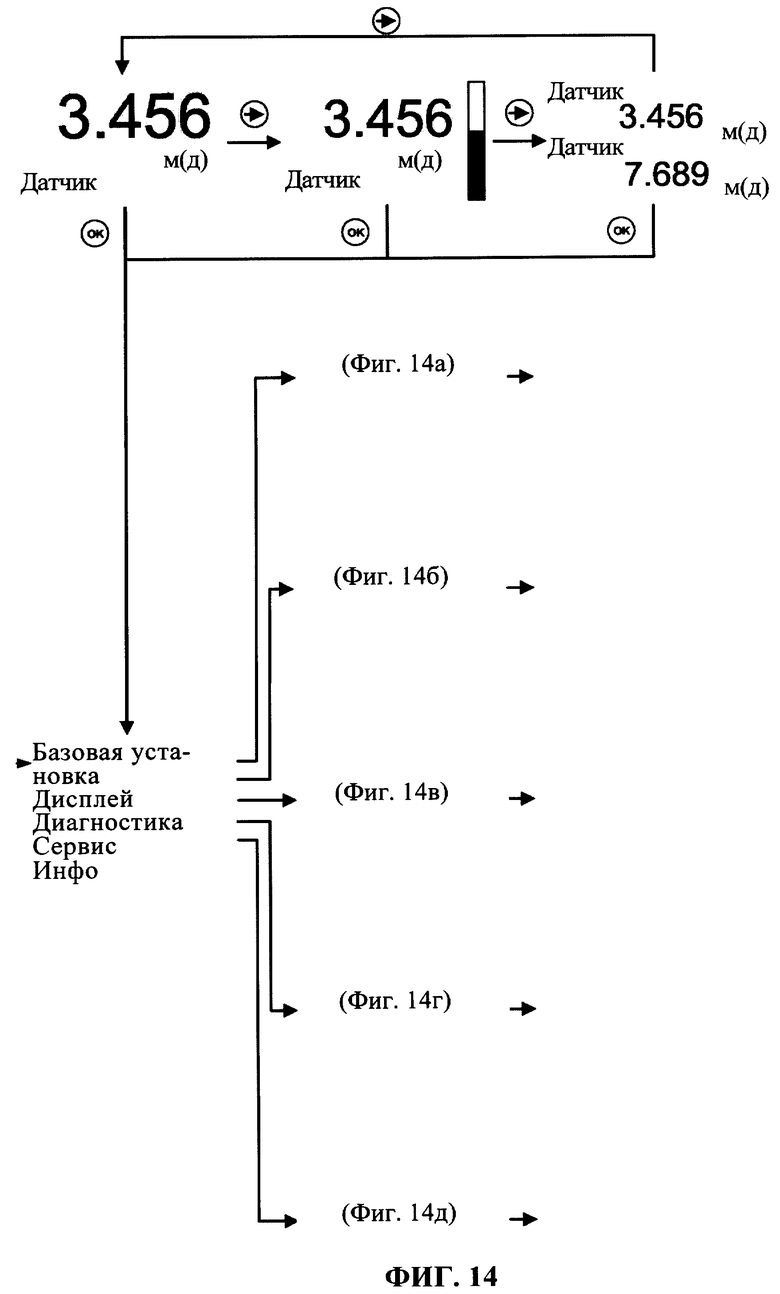
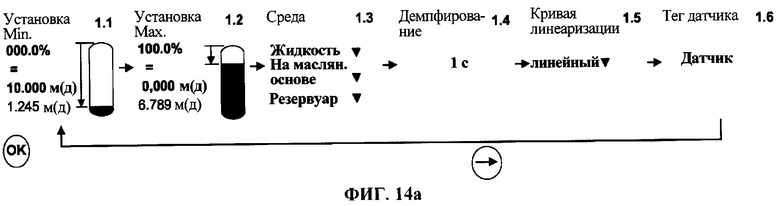
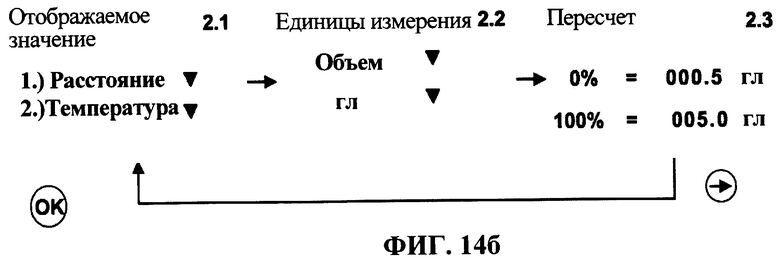
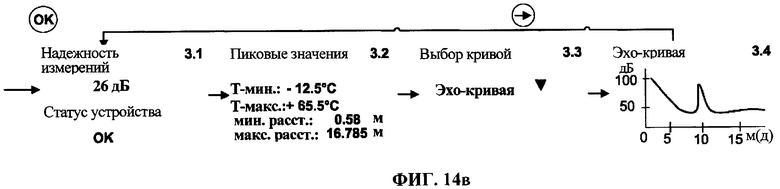
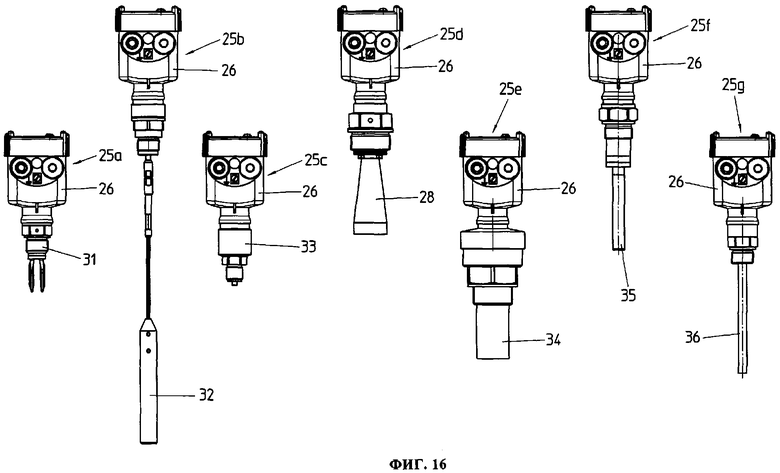
на фиг.9-16 - другие варианты осуществления изобретения.
Необходимо отметить, что на всех чертежах соответствующие друг другу или одинаковые части, компоненты или блоки обозначены одинаковыми позициями.
На фиг.1 схематично показана общая структура имеющего модульную конструкцию предлагаемого в изобретении устройства 1, предназначенного для определения физической величины в технологическом процессе и ниже кратко называемого датчиком. Все электрические функциональные блоки этого датчика размещены в корпусе 2, защищающем их от влияния внешних факторов, а также от химического или механического воздействия анализируемого материала. На корпусе 2 размещено или в него встроено присоединение 3 (крепежный блок). Это присоединение 3 используется для приспособления датчика к условиям, преобладающим в месте измерения, и соответственно для его связи или сопряжения с объектом измерения. При установке датчика 1 на емкости присоединение 3 представляет собой, например, фланец, привинчиваемый к сопряженному фланцу, предусмотренному у емкости. В другом варианте присоединение 3 может представлять собой наружную резьбу, которой датчик 1 ввинчивается во внутреннюю резьбу, предусмотренную у емкости, и таким путем крепится к ней. В целом же присоединение 3 представляет собой механическую деталь и поэтому всегда должно рассматриваться в неразрывной связи с корпусом 2. Присоединение 3 может, как уже указывалось выше, являться частью корпуса 2 или может быть жестко соединено с ним.
В или на корпусе 2 размещен далее механический или электромеханический чувствительный элемент 4, который взаимодействует с анализируемой средой, характеризующую которую физическую величину требуется определять. Чувствительный элемент 4 преобразует измеряемую физическую величину анализируемой среды 5 в электрическую измеряемую величину 6. Чувствительный элемент 4, поскольку в зависимости от используемого метода измерения он должен определенным образом взаимодействовать со средой 5, либо непосредственно контактируя с ней, либо испуская и принимая сигналы, размещен в отверстии в корпусе 2 или закреплен снаружи него. Чувствительный элемент 4 можно также комбинировать с присоединением 3 таким образом, чтобы он после монтажа выступал внутрь емкости или прилегал к ее стенке.
Электрический сигнал 6 с выхода чувствительного элемента 4 подвергается дальнейшей обработке в электронном блоке датчика. Электронный блок 7 датчика представляет собой специфический для конкретного датчика схемный компонент, который содержит аппаратные, а также при необходимости программные средства для преобразования первичного электрического сигнала 6 в унифицированный электрический измерительный сигнал, пропорциональный измеренному значению 8. Для этого электронный блок 7, как уже указывалось выше, имеет, например, микропроцессор с соответствующей периферией (ОЗУ, ПЗУ, ЭСППЗУ, АЦП), усилители, фильтры и другие периферийные компоненты.
С выхода электронного блока 7 унифицированный измерительный сигнал, пропорциональный измеренному значению 8, поступает в блок 10 обработки, в котором он преобразуется в требуемую информацию о физической величине, передаваемую затем в виде электрического сигнала 12 в блок 13 связи. Для такого преобразования в ЭСППЗУ блока 10 обработки хранятся специфические для конкретного датчика поправочные и настроечные значения, которые передаются в блок 10 обработки блоком 13 связи и которые используются микропроцессором для вычисления значения физической величины. В предпочтительном варианте такая обработка осуществляется с помощью программы, выполняемой аппаратными средствами микропроцессора.
Блок 13 связи служит для вывода требуемых данных, регистрируемых датчиком, и для ввода указанных поправочных и настроечных значений, соответственно для параметрирования датчика 1. В простейшем случае блок 13 связи имеет визуальный индикатор, а также клавиши для ввода информации или команд. Однако блок связи может также иметь интерфейсы для подключения датчика 1 к обычной полевой шине. Подобной полевой шиной датчик 1 соединен, например, с системой 15 управления процессом (СУП).
Назначение блока 16 электропитания состоит в преобразовании напряжения питающей сети, подводимого к датчику 1, например, от внешнего источника питания в системе 15 управления процессом, в соответствующее стабилизированное напряжение 17 (например, 3 и 5 вольт), необходимое для работы электрических функциональных блоков датчика 1.
Вся конструкция датчика 1 должна соответствовать определенным нормам безопасности, например, нормам взрывобезопасности (концепция взрывозащиты). Подобная концепция безопасности охватывает все функциональные блоки датчика и может быть реализована различными путями. Типом ее реализации определяются требования, предъявляемые к различным функциональным блокам датчика 1, например, требования, предъявляемые к корпусу 2, или требования по ограничению потребляемой электрическими схемами мощности.
При практической реализации предлагаемой в изобретении концепции модульного построения датчиков необходимо обращать внимание на целесообразное или оптимальное разделение отдельных функциональных блоков и прежде всего электрических элементов на индивидуальные аппаратные компоненты, соответственно смонтированные печатные платы. Ключевым аппаратным элементом является при этом микропроцессор, который может выполнять программы, заложенные в несколько различных функциональных блоков, например, электронный блок 7, блок 10 обработки и блок 13 связи. В соответствии с этим микроконтроллер обращается к различным функциональным блокам. Из сказанного со всей очевидностью следует, что показанное на фиг.1 разделение функциональных блоков по выполняемым ими функциям не обязательно должно соответствовать их разделению на аппаратные компоненты, которые образуют модули, из которых компонуется датчик 1. Иными словами, за счет соответствующего объединения определенных функциональных блоков в один аппаратный блок можно получить отдельные аппаратные компоненты, необходимые для компоновки из них датчиков на основе предлагаемой в изобретении платформы. При таком объединении функциональных блоков в аппаратные компоненты возможна и обратная ситуация, при которой определенные функциональные блоки можно также разделять на два или более аппаратных компонентов.
В результате подобного разделения функциональных блоков на аппаратные компоненты создается своего рода "набор" ("конструктор") модулей для компоновки из них датчика модульной конструкции на основе предлагаемой в изобретении платформы. Следует, однако, отметить, что разделение функциональных блоков на аппаратные компоненты в принципе никак не зависит от их разделения на программные компоненты. Иными словами, в отличие от разделения функциональных блоков на аппаратные компоненты, в результате которого получают набор из отдельных физических конструктивных элементов датчика, программные компоненты, получаемые в результате разделения на них функциональных блоков, реализуют выполняемые отдельными функциональными блоками функции или их части.
Для пояснения того, каким образом практически можно реализовать модульную конструкцию датчиков, построенных на основе предлагаемой в изобретении платформы, на фиг.2 и 3 показаны отдельные функциональные блоки. При этом на фиг.2 показаны в основном механические компоненты предлагаемой в изобретении модульной конструкции датчиков, построенных на основе единой платформы. Датчики для измерения уровня подразделяются, как уже указывалось выше, на датчики непрерывного измерения, которые предоставляют информацию, например, о степени заполнения емкости, выраженной в процентах от всего ее объема, и на датчики предельного уровня, которые срабатывают лишь в том случае, когда уровень содержимого емкости повышается сверх или падает ниже некоторого определенного уровня. В зависимости от назначения датчика используются различные физические методы измерения. В соответствии с этим для измерений могут использоваться следующие, показанные на фиг.2 чувствительные элементы 41-48:
- чувствительный элемент 41 для измерения уровня с помощью свободно излучаемых микроволн (например, антенна),
- чувствительный элемент 42 для измерения уровня с помощью ультразвуковых волн (например, электроакустический преобразователь-излучатель),
- чувствительный элемент 43 для измерения уровня с помощью пропускаемых по волноводу электромагнитных волн (например, тросовый зонд),
- чувствительный элемент 44 для емкостного измерения уровня (например, стержневой зонд),
- чувствительный элемент 45 для измерения уровня на основе гидростатического давления (например, мембрана с погружным конденсатором),
- чувствительный элемент 46 для измерения уровня по разности давлений (например, дифференциальный преобразователь разности давлений),
- чувствительный элемент 47 для измерения предельного уровня с помощью виброэлементов (например, колебательная вилка),
- чувствительный элемент 48 для емкостного измерения предельного уровня (например, стержневой зонд).
Перечисленные выше чувствительные элементы 41-46 пригодны для непрерывного измерения уровня, тогда как чувствительные элементы 47 и 48 используются преимущественно для измерения предельного уровня.
Для сохранения концепции модульной компоновки датчиков чувствительные элементы 41-48 для возможности их крепления к различным корпусам 21-23 можно комбинировать с различными присоединениями 31-33.
Присоединение 31 представляет собой фланец с отверстиями, к которому известным образом крепятся один из корпусов 21-23 и один из чувствительных элементов 41-48. Сам фланец служит для крепления датчика 1 к соответствующему сопряженному фланцу, окружающему отверстие в емкости. В другом варианте присоединение 32 имеет наружную резьбу, а присоединение 33 представляет собой устройство, специально разработанное для применения в конкретной области, где требуется измерять уровень материала, например, для применения в пищевой промышленности, где подобные, способные длительно сохранять герметичность присоединения обеспечивают соблюдение высоких требований, предъявляемых к стерильности.
Корпус 21 изготовлен из пластмассы и поэтому имеет исключительно низкую стоимость, а корпуса 22 и 23 изготовлены из алюминия. Корпус 23 отличается от корпуса 22 наличием внутри него двух отделенных одна от другой полостей, одна из которых служит полостью для подключения проводов, в которой размещены электрические выводы и которая возможно содержит разделительный барьер, а другая из них используется для размещения в ней всей электроники датчика 1. Подобное конструктивное исполнение корпуса обусловлено определенной концепцией взрывобезопасности электрооборудования (обеспечение взрывозащиты).
Показанные на фиг.2 механические компоненты, необходимые для модульного исполнения датчика на основе предлагаемого в изобретении принципа, согласно изобретению можно произвольно комбинировать между собой и использовать как взаимозаменяемые компоненты. Для соблюдения подобного принципа модульного исполнения датчика его механические компоненты имеют согласованные, соответственно совместимые между собой места их механического соединения или стыковки друг с другом, что позволяет комбинировать каждый корпус 21-23 с каждым фланцем 31-33 и каждым чувствительным элементом 41-48.
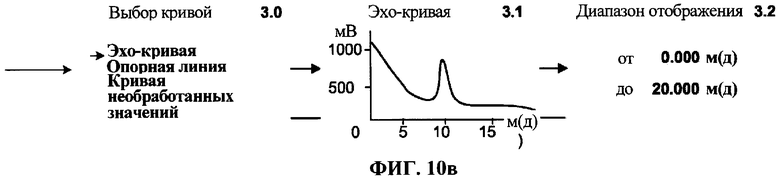
В отличие от фиг.2 на фиг.3 показаны преимущественно электрические функциональные блоки, которые можно комбинировать между собой по определенным правилам. На этом чертеже аналогично фиг.2 показаны различные чувствительные элементы 41-48. С каждым чувствительным элементом 41-48 связан соответствующий ему электронный блок 71-79. Каждый из чувствительных элементов 41-43, работа которых основана на измерении времени задержки между излученным и принятым эхо-сигналом и которые очень схожи по принципу своего действия, требуют применения дополненных блоком 74 обработки эхо-сигналов приемопередающих схем 71-73, которые из-за сходства принимаемых сигналов имеют очень схожую конструкцию. Учитывая близкое сходство принимаемых эхо-сигналов, в этом случае можно использовать имеющие идентичное исполнение блоки 74 обработки эхо-сигналов. В качестве примера подобных блоков 74 обработки эхо-сигналов можно назвать устройства, разработанные фирмой VEGA Grieshaber KG и выпускаемые под товарным знаком ECHOFOX®. Используемые в таких датчиках уровня (уровнемерах), работа которых основана на измерении времени задержки между излученным и принятым эхо-сигналом, схемные решения и принципы обработки сигналов хорошо известны специалистам в данной области и поэтому подробно не рассматриваются в настоящем описании, а дополнительную информацию о них можно найти в публикации "Radar level measurement", Peter Divine, 2000, ISBN 0-9538920-0-Х. Результатом обработки эхо-сигналов блоком 74 является, например, измеренное значение, соответствующее расстоянию между датчиком 1 и поверхностью содержимого емкости.
Емкостной чувствительный элемент 44, предназначенный для непрерывного измерения уровня, и чувствительный элемент 48, предназначенный для измерения предельного уровня, очень сходны между собой по принципу измерения, и поэтому оба этих чувствительных элемента можно использовать в комбинации с идентичными или по меньшей мере частично идентичными электронными блоками 75 и 79. Благодаря этому появляется возможность дальнейшей унификации аппаратных компонентов и сокращения их количества для компоновки датчиков на единой платформе.
Сказанное в принципе относится и к чувствительным элементам 45 и 46, работа которых основана на измерении давления, соответственно разности давлений, вместе с соответствующими им электронным блокам 76 и 77, которые, например, также определяют величину электрической емкости, в частности, погружного конденсатора. В соответствии с этим электронные блоки 75, 76, 77 и 79 могут иметь идентичное или по меньшей мере частично идентичное исполнение.
Колебания чувствительного элемента 47 (например, колебательной вилки), предназначенного для вибрационного измерения предельного уровня, возбуждаются по сигналу электронного блока 78, который анализирует амплитуду, частоту и/или фазу совершаемых колебаний.
Согласно изобретению все электронные блоки 74-79 выдают, таким образом, унифицированный электрический измерительный сигнал, пропорциональный измеренному значению 8, которое известным образом взаимосвязано с определяемым уровнем заполнения емкости. Для подобного приведения измерительных сигналов к унифицированному виду электронные блоки 71-79, как уже говорилось выше, имеют, например, микропроцессор с соответствующей периферией (ОЗУ, ПЗУ, ЭСППЗУ, АЦП), усилители, фильтры и другие периферийные компоненты.
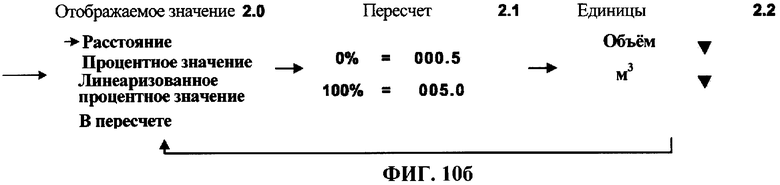
Поскольку электрический сигнал, пропорциональный измеренному значению 8, приведен согласно изобретению к унифицированному для всех электронных блоков 74-79 виду, это измеренное значение 8 может преобразовываться идентичным для всех электронных блоков 74-79 блоком 10 обработки в выходное значение 12, которое точно соответствует искомой информации об уровне заполнения емкости. Такая информация в случае датчиков предельного уровня идентична, например, сообщению "Предельный уровень достигнут", а в случае датчиков непрерывного измерения уровня отражает, например, степень заполнения емкости, выраженную в процентах от всего ее объема.
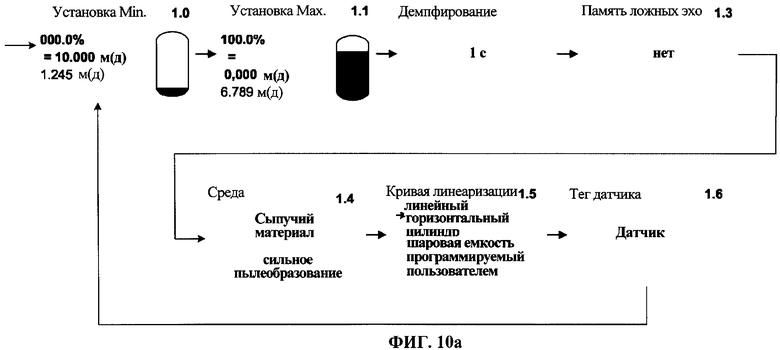
Для преобразования измеренного значения 8 в выходное значение 12 блок 10 обработки запрашивает сохраненную в памяти и относящуюся к конкретному датчику информацию о взаимосвязи между измеренным значением 8 и искомой физической величиной. Такая хранящаяся в памяти информация представляют собой, например, поправочные и настроечные значения, которые определяются в ходе калибровки датчика в конце процесса его изготовления и в ходе настройки датчика при его вводе в эксплуатацию по месту его применения. Для микроволнового датчика уровня такими поправочными значениями являются, например, нулевая отметка для отсчета расстояния и привязка измеренного значения 8 к расстоянию до чувствительного элемента датчика, т.е. угловой коэффициент. Настроечные значения содержат информацию о самой емкости и месте установки датчика 1, которая позволяет пересчитывать измеренные значения расстояния между датчиком и поверхностью содержимого емкости в степень ее заполнения. Если подобная взаимосвязь носит нелинейный характер из-за особенностей геометрии емкости, то в этом случае необходима дополнительная линеаризация, учитывающая подобные особенности конкретной емкости.
Необходимые поправочные и настроечные значения передаются в датчик 1 извне через блок 13 связи и поступают по информационному каналу 14 в блок 10 обработки. Помимо этого в блок 10 обработки таким же путем при необходимости поступают и другие данные для параметрирования датчика 1 для возможности его оптимального согласования с выполняемыми им задачами. И наоборот, блок 10 обработки может при необходимости предоставлять не только информацию о требуемом выходном значении 12, но и дополнительные данные, например, значения для самодиагностики датчика 1.
Подобные высокотехнологичные датчики в некоторых случаях требуют также обмена параметрами между блоком 10 обработки и электронным блоком 7 по информационному каналу 8, соответственно 11.
Блок 13 связи содержит различные компоненты 131-136, которые, как уже упоминалось выше, обеспечивают обмен информацией между датчиком 1 и внешними устройствами, например, системой 15 управления процессом. Для интеграции датчика 1 в систему 15 управления процессом используются, например, широко распространенные системы на основе полевых шин, такие как Profibus PA, Fieldbus Foundation (FF), Industrial Ethernet (IE) или HART. Необходимые для этого компоненты 132, 133 и 134 реализованы на аппаратном или программном уровне в блоке 13 связи.
Другая обычная возможность подсоединения датчика к системе 15 управления процессом состоит в использовании аналогового токового выхода 4-20 мА, обозначенного позицией 131. В случае датчиков, запитываемых с помощью так называемой "токовой петли", для снижения расходов на электропроводку одну пару проводников принято использовать одновременно и для электроснабжения, и для передачи данных.
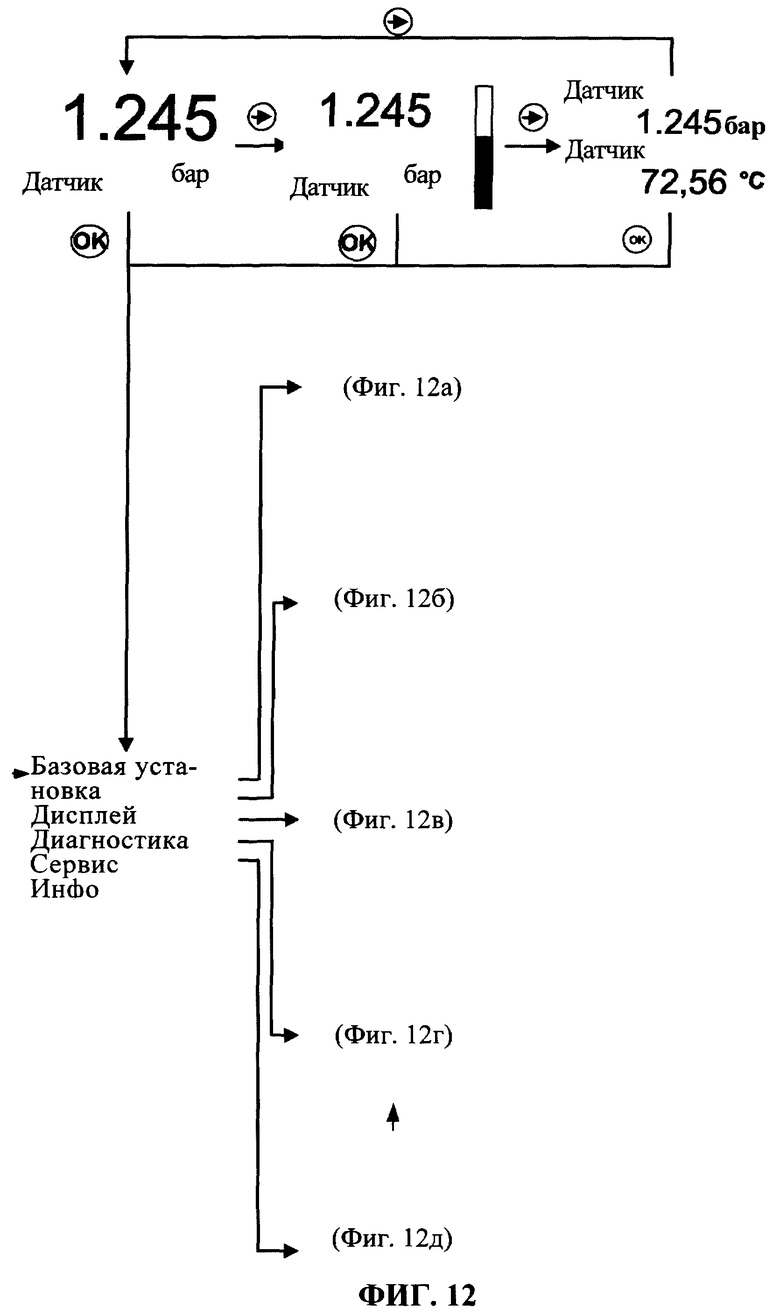
Датчик 1 наряду с устройствами, позволяющими интегрировать его в систему 15 управления процессом, может иметь дополнительный интерфейс, например, в виде обозначенного позицией 135 последовательного интерфейса шины IIC, через который датчик 1 можно непосредственно по месту его установки подключить к компьютеру для обмена между ними данными. Через этот же интерфейс 135 шины IIC с датчиком 1 данными обменивается размещенный в нем или же отдельно от него необязательный блок 136 индикации и управления.
Блок 16 питания от сети запитывается электроэнергией извне либо по отдельным кабелям, либо по используемому одновременно для передачи информации кабелю и подает регулируемое напряжение 17 величиной предпочтительно 3 и 5 вольт на отдельные аппаратные компоненты.
В приведенном выше описании речь шла исключительно о функциональных блоках, составляющих платформу или базу для построения на ее основе различных датчиков. При практической реализации представленной в настоящем описании концепции функциональной платформы для построения на ее основе датчиков уровня требуется использование следующих аппаратных компонентов: унифицированного блока питания от сети в виде комбинации из блока электропитания и блока связи в различных исполнениях, унифицированного цифрового модуля с электронным блоком датчика и микропроцессором, включая соответствующую периферию для выполнения отдельных функций, необязательного унифицированного блока индикации и управления, а также отчасти унифицированных, отчасти специализированных аппаратных компонентов с электронным блоком датчика. Все эти компоненты образуют электронную аппаратную базу "платформы" для построения на ее основе датчиков. Микропроцессор можно гибко программировать, закладывая в него как унифицированные, так и специализированные программные модули. В качестве примеров при этом можно назвать программный модуль для связи (обмена данными), программный модуль для обработки результатов измерений и программный модуль для обработки сигнала датчика.
На фиг.4 показан "набор" ("конструктор") из электронных аппаратных компонентов, необходимых для модульной компоновки датчиков на основе единой платформы. Вся электроника состоит при этом минимум из двух (блок электропитания и цифровой модуль) и максимум из четырех собранных печатных плат, соответствующее изобретению исполнение которых допускает возможность их целесообразного комбинирования между собой с учетом определенных аспектов. С этой целью каждый из компонентов, которые выполняют одинаковые функции, имеет одинаковые размеры.
В качестве блока питания от сети можно использовать три различных устройства 161-163 с унифицированными габаритными и присоединительными размерами, а именно: двухпроводной блок 161 питания от сети для подключения к контуру регулирования технологического процесса с двухпроводным выходом на 4-20 мА, возможно с дополнительной связью через шину HART, четырехпроводной блок 162 питания от сети с одной парой проводников (проводов) для электропитания и одной парой проводников для передачи результатов измерений и блок 163 питания от сети для подключения к полевой шине Profibus PA, Fieldbus Foundation, Industrial Ethernet или HART. Исполнение каждого из различных цифровых модулей 101-106 зависит от реализуемого метода измерений. При более сложных методах измерений, реализуемых цифровыми модулями 101-103 (микроволны, ультразвук или ДРМ), электронный блок 71-73 требуется размещать на отдельной печатной плате, тогда как при более простых методах измерений, основанных на измерении давления, емкости или характеристик вибрации и реализуемых цифровыми модулями 104-106, электронный блок можно размещать на той же самой цифровой плате 104-106, что и микропроцессор, являющийся одним из функциональных блоков датчика.
Электронный узел датчика 1 необязательно может быть дополнен и доукомплектован размещенным в отдельном корпусе блоком 136 индикации и управления.
Предлагаемая в изобретении модульная конструкция датчиков, основанная на применении описанного выше "набора" унифицированных модулей, ниже более подробно рассмотрена на примере двух конкретных датчиков модульной конструкции.
На фиг.5 и 6 показаны функциональные блоки отдельных плат и их соединения между собой для двухпроводного микроволнового датчика (фиг.5) и двухпроводного емкостного датчика (фиг.6).
В обоих датчиках используется идентичный двухпроводной блок 161 питания от сети, обеспечивающий возможность подключения двухпроводной токовой петли 131 на 4-20 мА, через которую датчик известным образом не только выдает измеренное значение, но и запитывается электроэнергией. Блок 161 питания от сети имеет два интерфейса 135 шины IIC, через которые к датчику дополнительно можно подключить необязательный внутренний и/или внешний блок 136 индикации и управления или компьютер.
Все входы и выходы блока питания от сети защищены с учетом требований электромагнитной совместимости (ЭМС) и взрывозащиты. Блок 161 питания от сети имеет ступень 1611 тока, в которую от цифровой платы поступает информация об измеренном значении и которая регулирует протекающий по двухпроводной токовой петле ток в диапазоне от 4 до 20 мА.
Напряжение на входе двухпроводной токовой петли на 4-20 мА преобразуется двумя преобразователями 1612, 1613 постоянного напряжения в стабилизированное напряжение 3 и 5 вольт соответственно, которое подается на цифровой модуль. В модеме 1614 HART цифровыми данными модулируется протекающий по двухпроводной токовой петле ток, соответственно демодулируются поступающие по ней данные. Обмен такими данными между модемом HART и микропроцессором осуществляется по соответствующим линиям связи.
Каждый из цифровых модулей 101 и 105 содержит идентичный для обоих датчиков микропроцессор 1011, включая соответствующую периферию (ОЗУ 1012, ПЗУ 1013, ЭСППЗУ 1014, АЦП 1015), и отличающуюся электронным блоком часть. Отличие при этом состоит в том, что для двухпроводного микроволнового датчика требуется использовать отдельную плату 71 с электронным блоком. Содержащийся на ней высокочастотный (ВЧ) модуль 711 генерирует сигнал, излучаемый чувствительным элементом 4 в направлении поверхности содержимого емкости. Отраженная от его поверхности волна вновь принимается чувствительным элементом 4 и преобразуется в приемнике ВЧ модуля 711, например, в другую частотную или временную область. Тактовые импульсы для передающей и приемной частей генерируются соответствующим генератором 712 в электронном блоке 17, связанным в свою очередь линиями управления с микропроцессором 1011. С помощью этих линий управления настраиваются параметры ВЧ модуля 711, такие, например, как активация/деактивация электронного блока 71 или разность между тактовым импульсом, по которому излучается сигнал, и тактовым импульсом, по которому принимается отраженный сигнал.
Поступающий из приемной части сигнал так называемой промежуточной частоты (ПЧ) после его усиления логарифмирующим усилителем 1016, в котором сигнал промежуточной частоты дополнительно подвергается еще и демодуляции, подается в виде логарифмической огибающей, характеризующей интенсивность отраженных сигналов в функции времени, в АЦП 1015. После аналого-цифрового преобразования этой огибающей в дискретные значения микропроцессор 1011 временно сохраняет их в ОЗУ и обрабатывает с учетом места отражения сигнала от поверхности содержимого емкости. Используя сохраненные в ЭСППЗУ поправочные и настроечные значения, микропроцессор 1011 может затем пересчитать измеренное расстояние до поверхности содержимого емкости в степень ее заполнения. На основе полученного результата в конечном итоге определяется величина регулируемого тока в токовой петле, подаваемого, как указано выше, в ступень 1611 тока, имеющуюся в блоке 161 питания от сети.
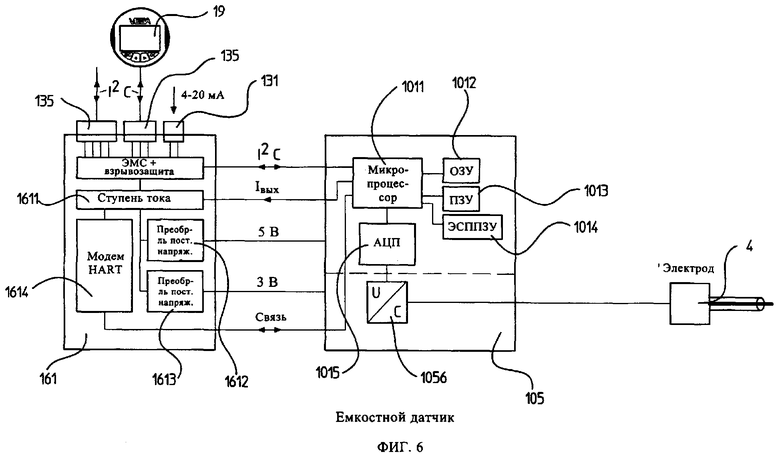
На фиг.6 показан двухпроводной емкостной датчик, который оснащен таким же блоком 161 питания от сети, что и показанный на фиг.5 двухпроводной микроволновый датчик. В емкостном датчике используется такой же микропроцессор 1011, включая соответствующую периферию (1012-1015), в связи с чем, как очевидно, блок 161 питания от сети и цифровой модуль 101 взаимодействуют между собой через такой же интерфейс.
Специфическая для конкретного датчика схемная часть у этого емкостного датчика полностью размещена на одной плате с электронным модулем 105, что позволяет отказаться от размещения электронного блока на отдельной плате. Емкость чувствительного элемента 4 (электрода) такого датчика преобразуется соответствующим преобразователем 1056 в сигнал напряжения, который после его дискретизации в АЦП 1015 поступает в микропроцессор 1011. Аналогично микроволновому датчику в емкостном датчике значение напряжения, пропорциональное фактической емкости чувствительного элемента, сравнивается с хранящимися в ЭСППЗУ 1014 поправочными и настроечными значениями и пересчитывается в результате в степень заполнения емкости.
Принцип работы электронного блока (преобразование емкость-напряжение) известен из уровня техники и более подробно в настоящем описании не рассматривается.
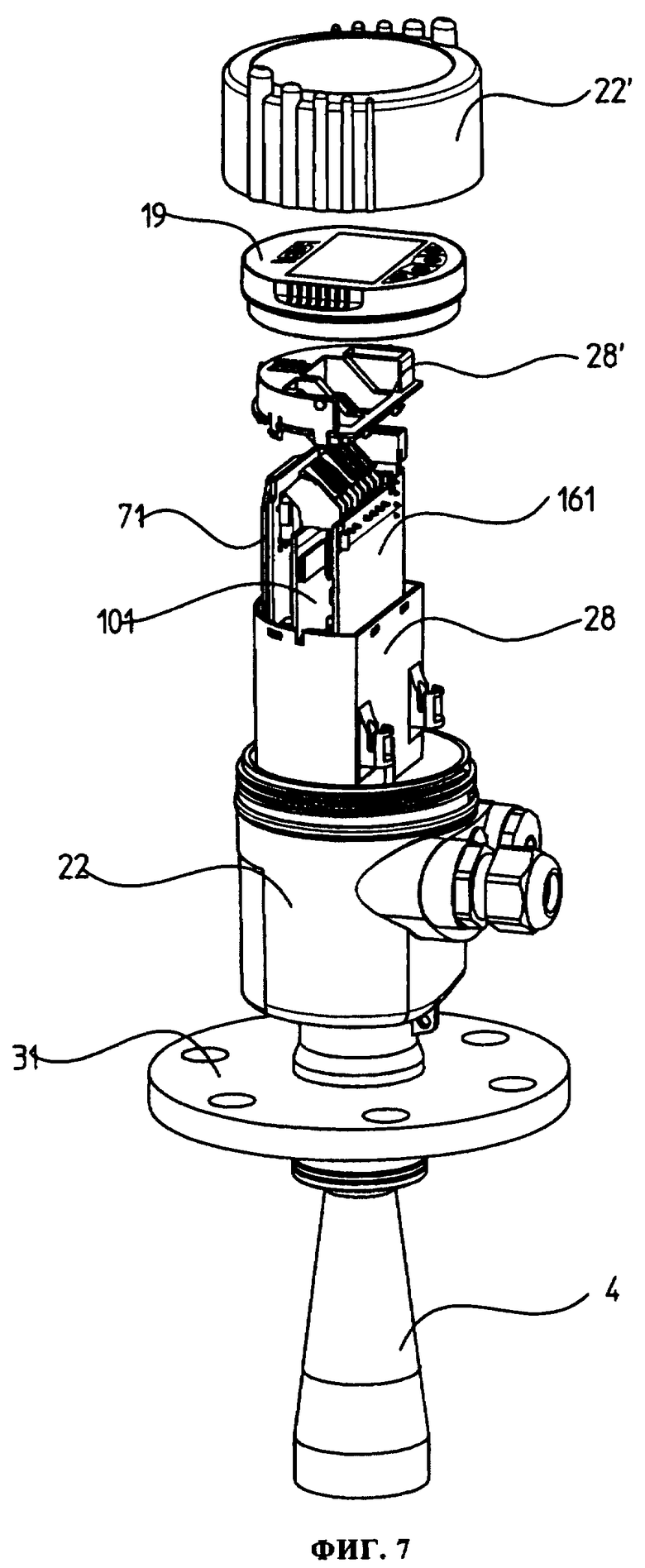
На фиг.7 показаны основные компоненты конструкции микроволнового датчика, показанного на фиг.5. В этом случае специфическими для этого конкретного датчика компонентами являются лишь чувствительный элемент 4 (рупорная антенна) и плата с электронным блоком 71. Все остальные компоненты, а именно: присоединение 31, корпус 22 с крышкой 22', внутренний корпус 8 с крышкой 8', цифровая плата 101, блок электропитания или блок 161 питания от сети и блок 136 индикации и управления, являются универсальными для рассматриваемой платформы и тем самым могут в таком же виде использоваться и в соответствующем двухпроводном емкостном датчике, показанном на фиг.6.
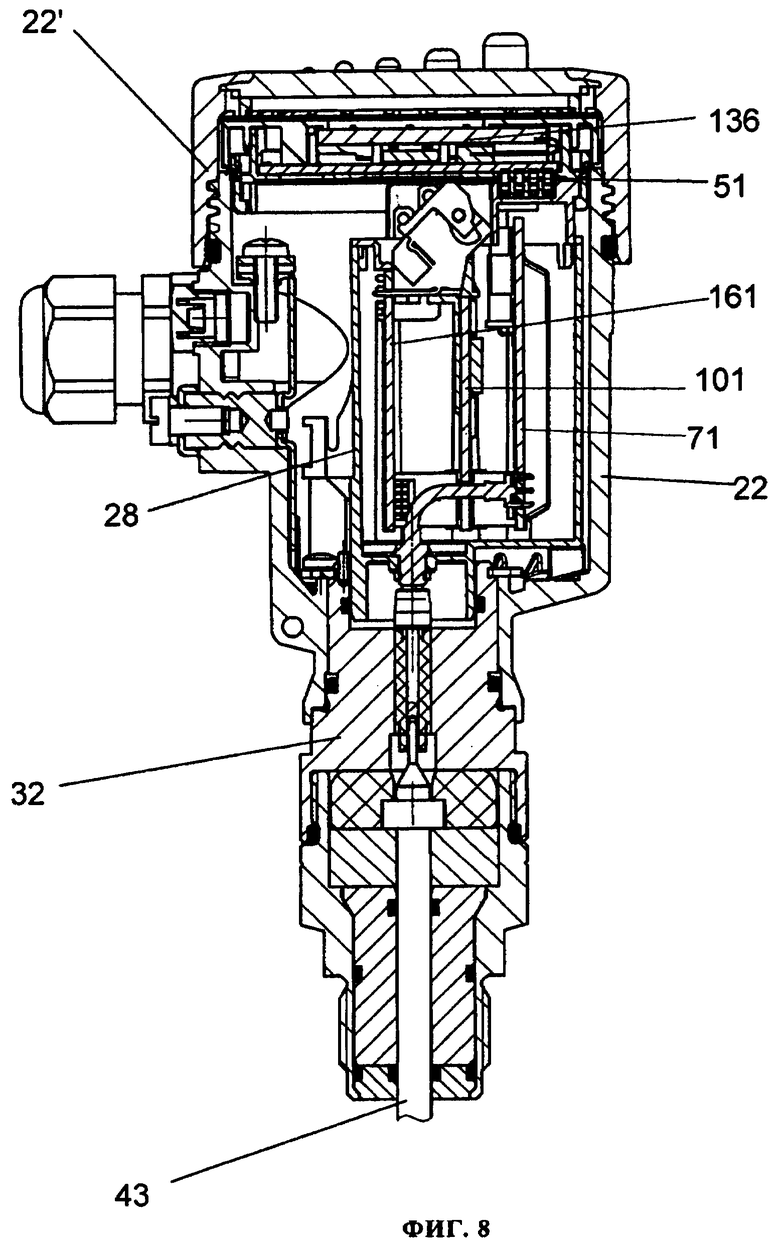
Существенное преимущество, обусловленное использованием в предлагаемой в изобретении системе модульного принципа, проиллюстрировано на фиг.8. На фиг.8 показан датчик, который лишь незначительно отличается от изображенного на фиг.7 микроволнового датчика, хотя он и представляет собой ДРМ-датчик. В отличие от уровня техники, согласно которому для переоснащения датчика требовалось вносить существенные изменения в его электронику и в механические детали, в данном случае переоснащение датчика ограничивается в основном заменой чувствительного элемента. Столь простое переоснащение датчика становится возможным, как указано выше, благодаря предлагаемой в изобретении унификации размеров соответствующих механических и электронных узлов.
Приведенный на фиг.8 разрез позволяет наглядно увидеть отдельные компоненты датчика. В этом случае, как указано выше, для преобразования показанного на фиг.7 микроволнового датчика в ДРМ-датчик рупорная антенна 41 заменена на стержневой или тросовый зонд 43. Такой стержневой или тросовый зонд по точно пригнанной посадке входит в присоединение 32 и передает подаваемые в него от цифровой платы 101 сигналы, соответственно передает в нее принятые отраженные сигналы для их дальнейшей обработки. Как показано на этом чертеже, присоединение 32 имеет составную конструкцию, отдельные части которой уплотнены друг относительно друга уплотнительными кольцами, позволяющими предотвратить влаго- или газообмен с внутренним пространством корпуса датчика или с окружающей средой.
Присоединение 32 в свою очередь встроено в корпус 22 и также уплотнено относительно него вставленным в соответствующий паз уплотнительным кольцом. Внутри корпуса 22 имеется по меньшей мере одна полость, в которую вставлен внутренний корпус 28 с размещенной в нем электроникой датчика, а именно: цифровой платой 101, блоком 161 питания от сети и электронным блоком 71. Сверху корпус 22 закрывается крышкой 22' и уплотняется относительно нее уплотнительным кольцом. В показанном на этом чертеже варианте в закрывающую корпус датчика крышку интегрирован блок индикации и управления, который соединен с электроникой датчика скользящими контактами 51.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНОГО ДАВЛЕНИЯ СО СДВОЕННЫМИ ДАТЧИКАМИ | 1994 |
|
RU2143665C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ МЕЖДУ ИЗМЕРИТЕЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ И УПРАВЛЯЮЩИМ УСТРОЙСТВОМ И ЛИНИЯ СВЯЗИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449940C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЯЗКОСТИ | 2002 |
|
RU2315974C2 |
| ЭЛЕКТРОННАЯ ЧАСТЬ ПОЛЕВОГО УСТРОЙСТВА, ЗАПИТЫВАЕМАЯ ВНЕШНИМ ИСТОЧНИКОМ ЭЛЕКТРОЭНЕРГИИ | 2007 |
|
RU2414739C2 |
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ВАГОННЫХ БУКС | 2008 |
|
RU2356771C1 |
| УСТРОЙСТВО ГАЗОВОГО КОНТРОЛЯ | 2023 |
|
RU2802163C1 |
| МОДУЛЬНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА БЕЛАШОВА | 2010 |
|
RU2435982C1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ МАЛОМОЩНЫХ ПЕРЕКЛЮЧАЮЩИХ ДАТЧИКОВ МОДУЛЬНОЙ СИСТЕМЫ | 2005 |
|
RU2358241C2 |
| ТЕХНОЛОГИЧЕСКОЕ УСТРОЙСТВО С ДИАГНОСТИКОЙ УСТАНОВИВШЕГОСЯ ТОКА | 2004 |
|
RU2350975C2 |
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2442964C1 |
Изобретение относится к системе для изготовления имеющего модульную конструкцию устройства для определения физической величины в технологическом процессе. Согласно изобретению система содержит несколько измерительных преобразователей физической величины в электрический сигнал. По меньшей мере два измерительных преобразователя из всего их числа различаются между собой принципом измерения. Система содержит далее по меньшей мере один унифицированный блок обработки измерительного сигнала, который может быть соединен с одним или несколькими измерительными преобразователями. В системе имеется также по меньшей мере один унифицированный блок и по меньшей мере один унифицированный блок электропитания. Система содержит, кроме того, по меньшей мере один унифицированный корпус для размещения в нем по меньшей мере нескольких блоков из группы, включающей по меньшей мере блок обработки, блок связи и блок электропитания. В состав системы входит также несколько крепежных блоков, которые предназначены для закрепления устройства для определения физической величины на емкости или стенке и которые различаются между собой своим исполнением, учитывающим заданные условия закрепления устройства. 2 н. и 32 з.п. ф-лы, 16 ил.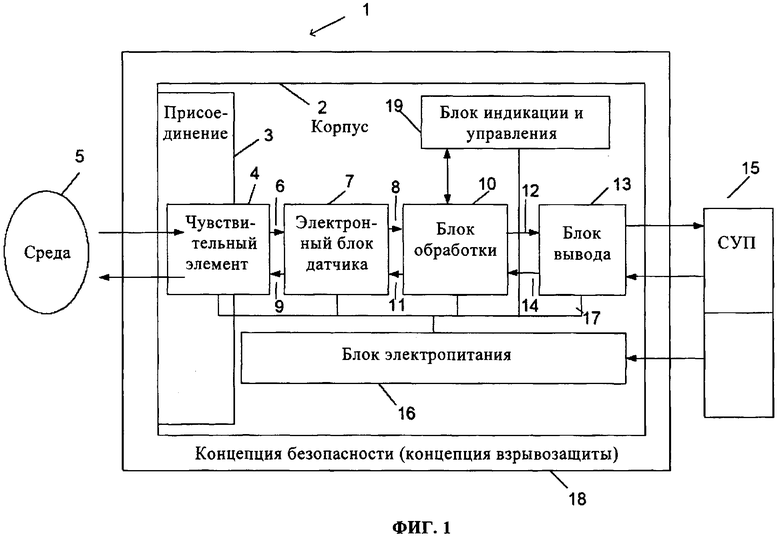
а) рупорную антенну (41) с соответствующей электроникой для излучения и приема ультразвуковых волн или микроволн,
б) штыревую антенну (43) с соответствующей электроникой для излучения и приема ультразвуковых волн или микроволн,
в) колебательную вилку (47) с соответствующей электроникой,
г) емкостной измерительный зонд (48) с соответствующей электроникой,
д) измерительный преобразователь температуры с соответствующей электроникой и
е) измерительный преобразователь давления с соответствующей электроникой.
| US 4818994 A, 04.04.1989 | |||
| US 5918194 A, 29.06.1999 | |||
| US 6295874 B1, 02.10.2001 | |||
| US 4365509 A, 28.12.1982 | |||
| Устройство для перфоривания нотных лент при игре на клавишных музыкальных инструментах | 1927 |
|
SU8470A1 |

