Изобретение относится к области автоматики и вычислительной технике, в частности к системе распознавания объектов на поверхности земли в условиях ночного поиска их характерных признаков с использованием оптической системы пилотажных очков ночного видения пилота вертолета.
Из уровня техники известны технические решения поставленной задачи [1, 2].
Первое из известных технических решений предполагает проведение анализа и контроля за состоянием природной и техногенной сред для площадных и линейных объектов, расположенных на суше, под водой и на водной поверхности, посредством объединения информационных потоков в едином Центре комплексного мониторинга природной среды (ЦКМПС), функционирующего на основе использования современных методов дистанционного зондирования при использовании геопорталов и порталов метаданных. [1].
Недостатком данного технического решения является сложность его конструктивного выполнения, обусловленная необходимостью проведения съемки территории природного техногенного объекта в масштабе от 1:500 до 1:50000, и подготовки картографических материалов территорий по этой фотосъемке в масштабе от 1:500 до 1:10000 методами дистанционного зондирования.
Известно и другое техническое решение поставленной задачи, включающее получение фотоснимка единицы площади угодий, передачу полученного фотоснимка на сервер, обработку фотоснимка с идентификацией объектов на нем и вывод результатов мониторинга, и осуществляют подсчет количества идентифицируемых объектов на каждом фотоснимке, определение степени зараженности всей площади угодий на основе подсчета объектов по полученным фотоснимкам, осуществляют идентификацию изображения объектов фотоснимков на сервере, используя обучаемые искусственные нейронные сети, с помощью которых выделяют границы изображения объекта в квадрате фиксированного размера полученного фотоснимка, сервер содержит базу данных насекомых во всех морфологических стадиях, базу данных сорных растений, базу данных видов заболеваний растений, указанные нейронные сети, используя базы данных изображений идентифицируемых объектов, обучается отличать фоны соответствующих фотоснимков разного вида и определять объекты на этих фотоснимках, в результате чего получают данные о месте обнаружения объекта, времени фиксации и количестве зафиксированных объектов. [2].
Последнее из перечисленных выше технических решений наиболее близко к описываемому.
Его недостаток заключается в недостаточно высоком быстродействии системы, обусловленном тем, что обработка получаемых данных осуществляется в системе только после окончания полного цикла зондирования всех участков земной поверхности.
Цель изобретения состоит в устранении указанного недостатка, т.е. в повышении быстродействия системы путем выдачи результатов обработки получаемых данных по каждому из объектов распознавания в реальном масштабе времени.
Поставленная цель достигается тем, что в систему, содержащую модуль приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, информационный вход которого является первым информационным входом системы, предназначенным для приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, синхронизирующий вход модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета является первым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения кодограммы запроса с автоматизированного рабочего места пилота вертолета в модуль приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, модуль идентификации величины пороговой дальности успешного распознавания объектов одного класса, первый информационный и первый синхронизирующий входы которого подключены к первому информационному и к синхронизирующему выходам модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета соответственно, информационный выход модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса является первым информационным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета кода величины пороговой дальности успешного распознавания объектов одного класса, синхронизирующий выход модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса является первым синхронизирующим выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета синхронизирующих сигналов запуска уведомлений пилоту вертолета о необходимости ввода данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, информационный вход которого является вторым информационным входом системы, предназначенным для приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, синхронизирующий вход модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета является вторым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения данных с оптического датчика пилотажных очков ночного видения пилота вертолета в модуль приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, информационный и синхронизирующий входы которого подключены к информационному и синхронизирующему выходам модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета соответственно, модуль идентификации базового адреса изображений объектов распознавания, первый информационный вход которого подключен к первому информационному выходу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, первый синхронизирующий вход модуля идентификации базового адреса изображений объектов распознавания подключен к первому синхронизирующему выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, модуль приема изображений объектов распознавания из базы данных сервера системы, информационный вход которого является третьим информационным входом системы, предназначенным для приема изображений объектов распознавания из базы данных сервера системы, синхронизирующий вход модуля приема изображений объектов распознавания из базы данных сервера системы является третьим синхронизирующим входом системы, предназначенным для занесения записей базы данных сервера системы в модуль приема изображений объектов распознавания из базы данных сервера системы, модуль регистрации признаков объектов распознавания, информационный вход которого является четвертым информационным входом системы, предназначенным для приема кодов признаков объектов распознавания с автоматизированного рабочего места пилота вертолета, синхронизирующий вход модуля регистрации признаков объектов распознавания является четвертым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения кодов признаков объектов распознавания с автоматизированного рабочего места пилота вертолета в модуль регистрации признаков объектов распознавания, информационный выход модуля регистрации признаков объектов распознавания подключен к второму информационному входу модуля идентификации базового адреса изображений объектов распознавания и к второму информационному входу модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса, синхронизирующий выход модуля регистрации признаков объектов распознавания подключен к второму синхронизирующему входу модуля идентификации базового адреса изображений объектов распознавания и к второму синхронизирующему входу модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса, модуль контроля завершения процедуры анализа массива признаков объектов распознавания, информационный вход которого подключен к второму информационному выходу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, первый счетный вход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен к второму синхронизирующему выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, первый сигнальный выход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен к первому установочному входу модуля регистрации признаков объектов распознавания, к первому установочному входу модуля приема изображений объектов распознавания из базы данных сервера системы, к первому установочному входу модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета и при этом является первым сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала запроса ввода кода следующего признака объектов распознавания, второй сигнальный выход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен к второму установочному входу модуля регистрации признаков объектов распознавания, к второму установочному входу модуля приема изображений объектов распознавания из базы данных сервера системы, к второму установочному входу модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета к установочному входу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета и при этом является вторым сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала завершения процедуры анализа массива признаков объектов распознавания, введены модуль верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы, первый информационный вход которого подключен к информационному выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, а второй информационный и синхронизирующий входы модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы подключены к информационному и к синхронизирующему выходам модуля приема изображений объектов распознавания из базы данных сервера системы соответственно, первый синхронизирующий выход модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы подключен к второму счетному входу модуля контроля завершения процедуры анализа массива признаков объектов распознавания и при этом является третьим сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала успешного распознавания объекта, и модуль селекции адресов изображений объектов распознавания в базе данных сервера системы, информационный и синхронизирующий входы которого подключены к информационному и к синхронизирующему выходам модуля идентификации базового адреса изображений объектов распознавания соответственно, а счетный и установочный входы модуля селекции адресов изображений объектов распознавания в базе данных сервера системы подключены к второму и к первому синхронизирующим выходам модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы соответственно, информационный выход модуля селекции адресов изображений объектов распознавания в базе данных сервера системы является адресным выходом системы, предназначенным для выдачи адресов изображений объектов распознавания на первый адресный вход сервера базы данных, а синхронизирующий выход модуля селекции адресов изображений объектов распознавания в базе данных сервера системы является вторым синхронизирующим выходом системы, предназначенным для выдачи сигналов управления считыванием кодов изображений объектов распознавания на вход первого канала прерывания сервера базы данных системы.
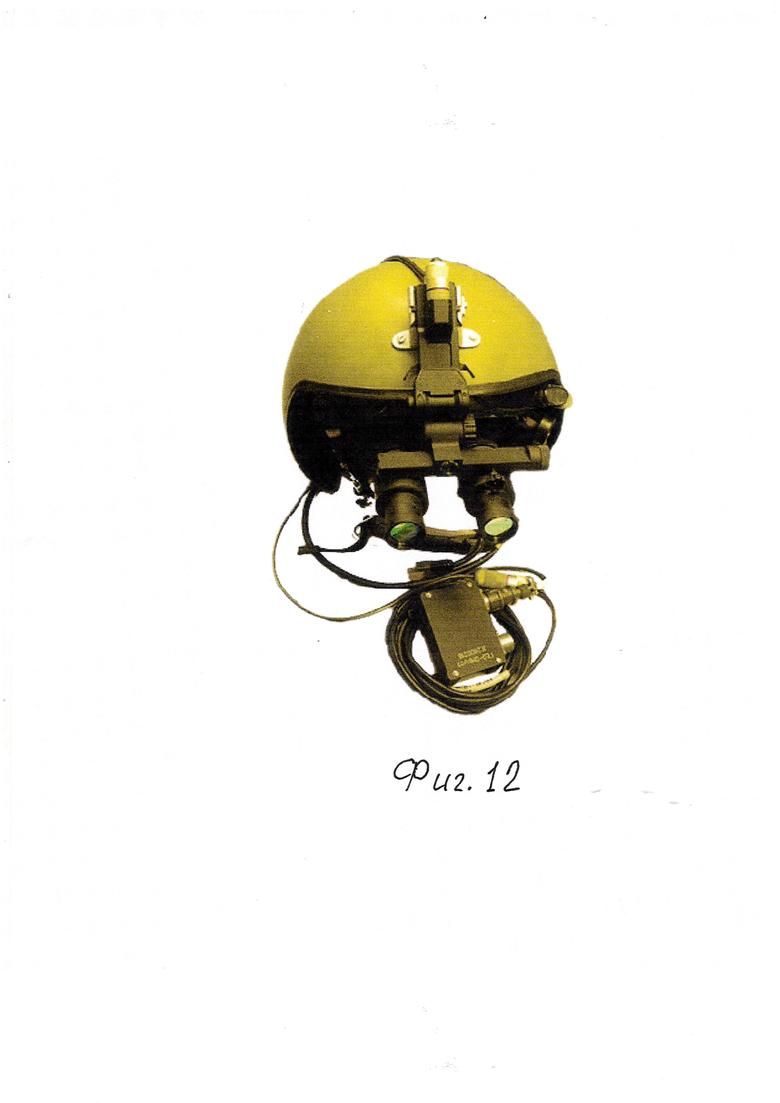
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема системы, на фиг.2 - структурная схема модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, на фиг.3 - структурная схема модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса, на фиг.4 - структурная схема модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, на фиг.5 - структурная схема модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, на фиг.6 - структурная схема модуля идентификации базового адреса изображений объектов распознавания, на фиг.7 - структурная схема модуля селекции адресов изображений объектов распознавания в базе данных сервера системы, на фиг.8 - структурная схема модуля приема изображений объектов распознавания из базы данных сервера системы, на фиг.9 - структурная схема модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы, на фиг.10 - структурная схема модуля контроля завершения процедуры анализа массива признаков объектов распознавания, на фиг.11 - структурная схема модуля регистрации признаков объектов распознавания, на фиг.12 приведен пример практической реализации шлема пилота вертолета с пилотажными очками ночного видения.
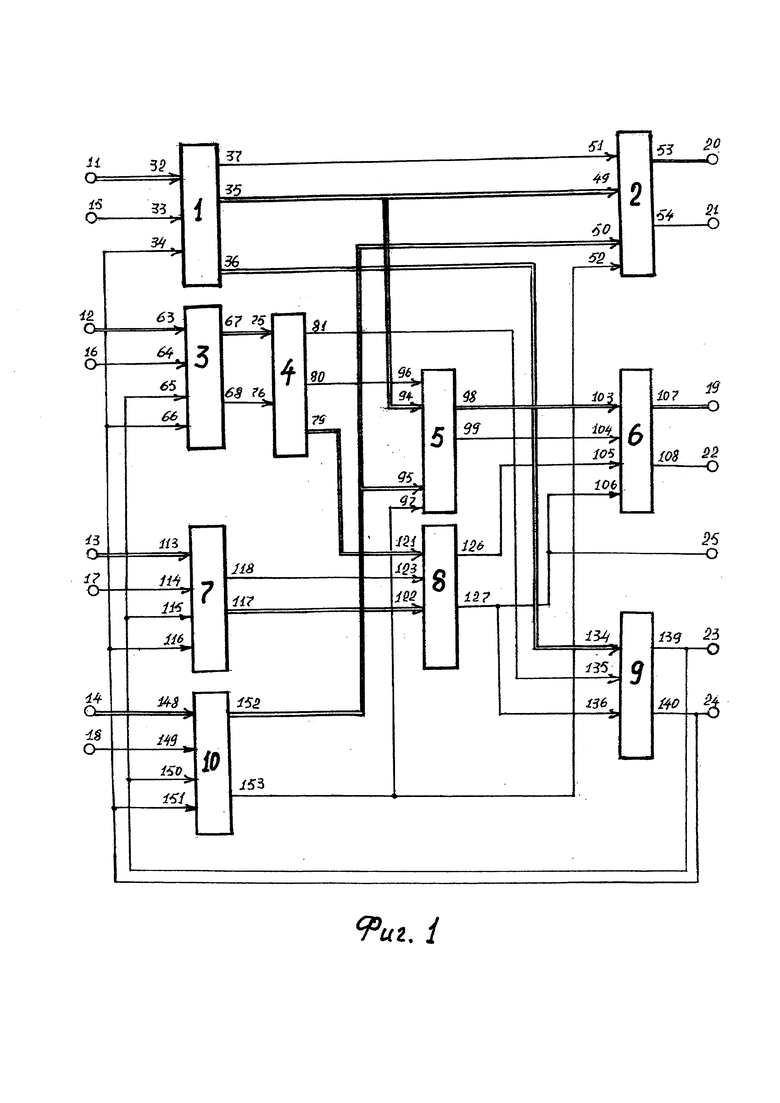
Система распознавания объектов на поверхности земли в условиях ночного поиска их характерных признаков с использованием оптической системы пилотажных очков ночного видения пилота вертолета (фиг.1) содержит модуль 1 приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, модуль 2 идентификации величины пороговой дальности успешного распознавания объектов одного класса, модуль 3 приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль 4 идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, модуль 5 идентификации базового адреса изображений объектов распознавания, модуль 6 селекции адресов изображений объектов распознавания в базе данных сервера системы, модуль 7 приема изображений объектов распознавания из базы данных сервера системы, модуль 8 верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы, модуль 9 контроля завершения процедуры анализа массива признаков объектов распознавания, модуль 10 регистрации признаков объектов распознавания,
На фиг.1 показаны первый 11, второй 12, третий 13 и четвертый 14 информационные входы системы, первый 15, второй 16, третий 17 и четвертый 18 синхронизирующие входы системы, а также адресный 19, информационный 20, синхронизирующие 21 - 22 и сигнальные 23-25 выходы системы.
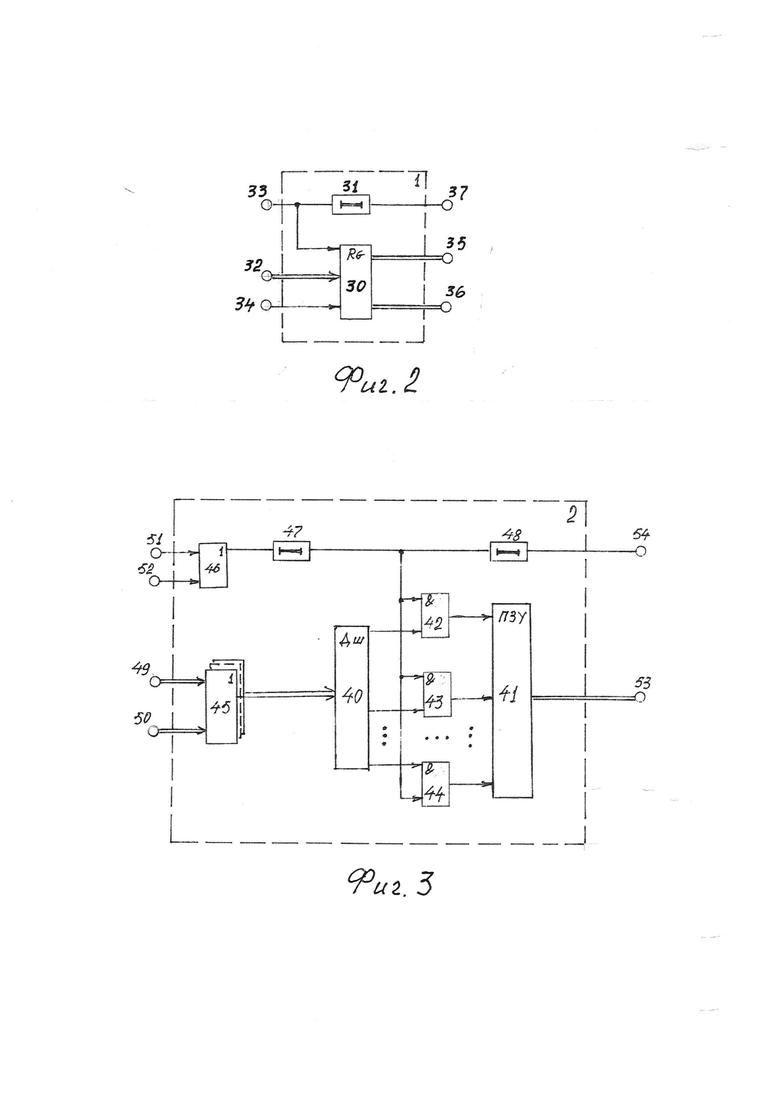
Модуль 1 приема кодограммы запроса с автоматизированного рабочего места пилота вертолета (фиг.2) содержит регистр 30 и элемент 31 задержки. На чертеже также показаны информационный 32, синхронизирующий 33 и установочный 34 входы, информационные 35 36 и синхронизирующий 37 выходы.
Модуль 2 идентификации величины пороговой дальности успешного распознавания объектов одного класса (фиг.3) содержит дешифратор 40, модуль памяти 41, выполненный в виде постоянного запоминающего устройства (ПЗУ), элементы 42 - 44 И, группу 45 элементов ИЛИ, элемент 46 ИЛИ и элементы 47 - 48 задержки. На чертеже также показаны информационные 49 - 50, синхронизирующие 51-52 входы, информационный 53 и синхронизирующий 54 выходы.
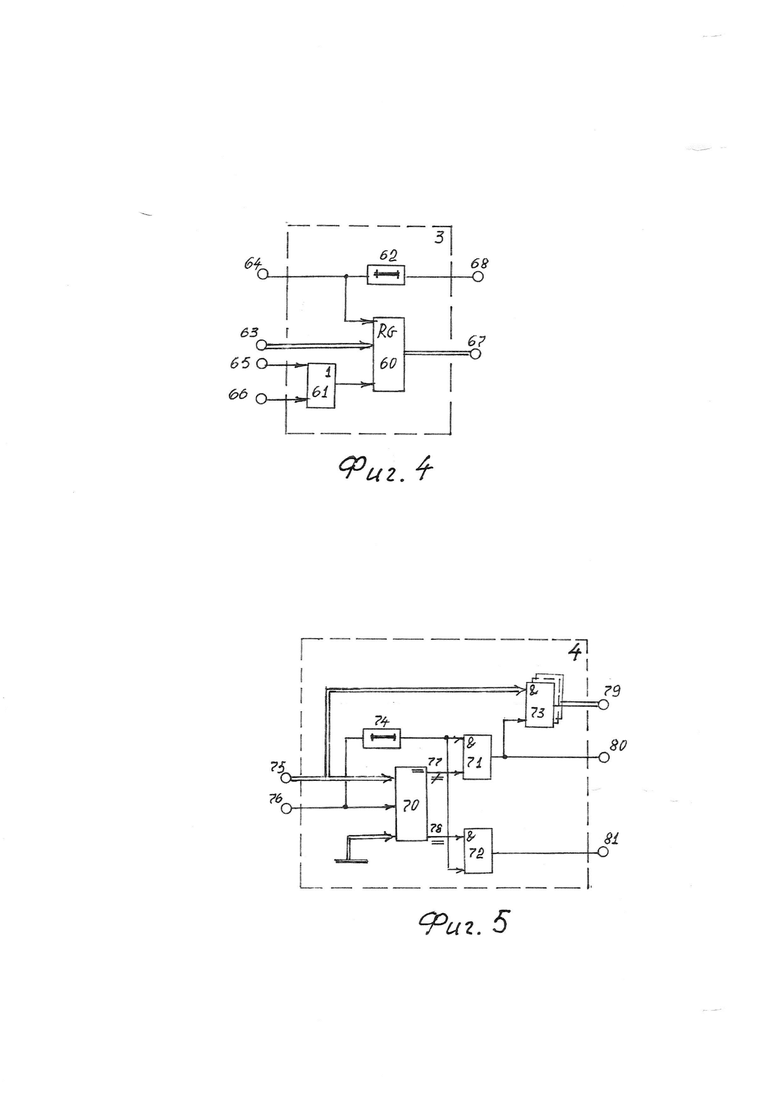
Модуль 3 приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета (фиг.4) содержит регистр 60, элемент 61 ИЛИ и элемент 62 задержки. На чертеже также показаны информационный 63, синхронизирующий 64 и установочные 65 - 66 входы, информационный 67 и синхронизирующий 68 выходы.
Модуль 4 идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета (фиг.5) содержит компаратор 70, элементы 71 - 72 И, группу 73 элементов И, элемент 74 задержки. На чертеже также показаны информационный 75 и синхронизирующий 76 входы, информационный 79 и синхронизирующие 80 - 81 выходы.
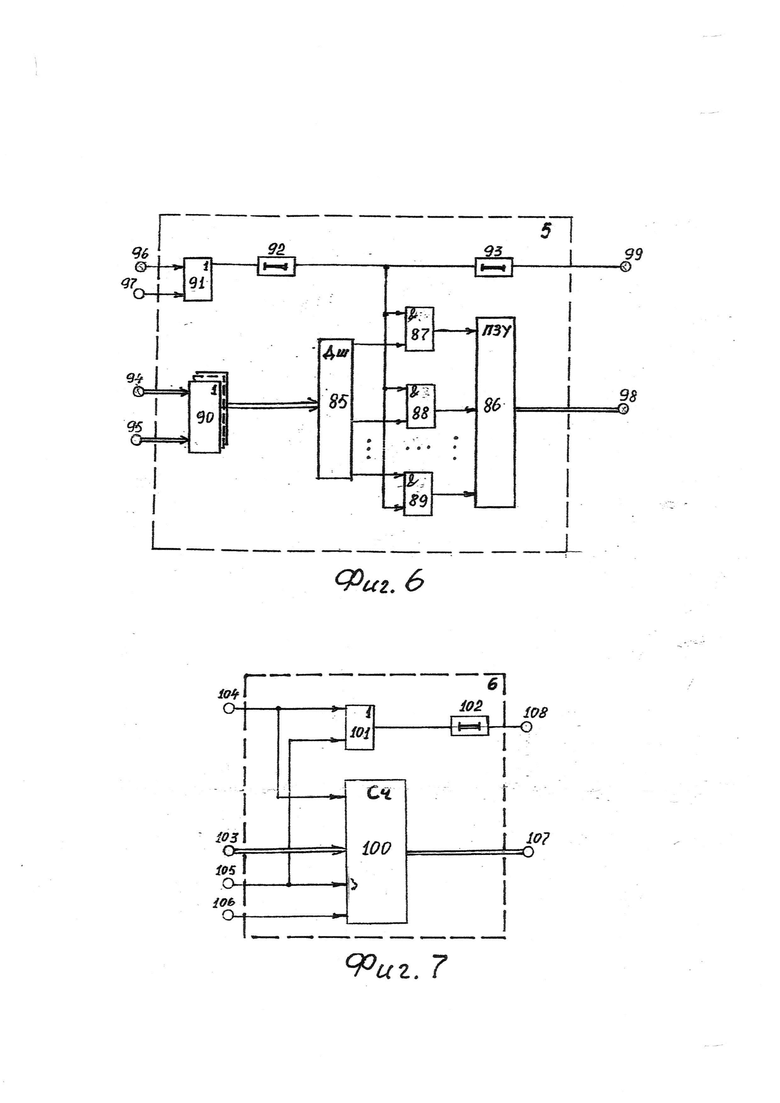
Модуль 5 идентификации базового адреса изображений объектов распознавания (фиг.6) содержит дешифратор 85, модуль памяти 86, выполненный в виде постоянного запоминающего устройства (ПЗУ), элементы 87 - 89 И, группу 90 элементов ИЛИ, элемент 91 ИЛИ и элементы 92 - 93 задержки. На чертеже также показаны информационные 94 - 95, синхронизирующие 96 - 97 входы, информационный 98 и синхронизирующий 99 выходы.
Модуль 6 селекции адресов изображений объектов распознавания в базе данных сервера системы (фиг.7) содержит счетчик 100, элемент 101 ИЛИ, элемент 102 задержки. На чертеже также показаны информационный 103, синхронизирующий 104, счетный 105 и установочный 106 входы, информационный 107 и синхронизирующий 108 выходы.
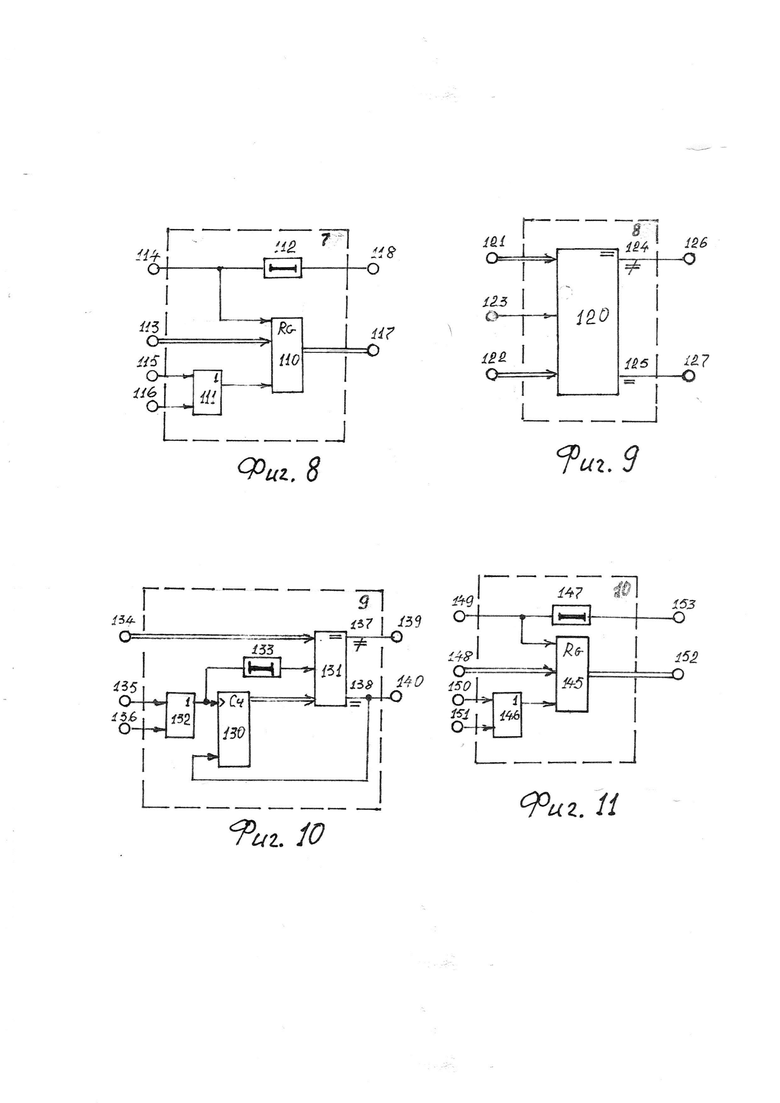
Модуль 7 приема изображений объектов распознавания из базы данных сервера системы (фиг.8) содержит регистр 110, элемент 111 ИЛИ и элемент 112 задержки. На чертеже также показаны информационный 113, синхронизирующий 114 и установочные 115 -116 входы, информационный 117 и синхронизирующий 118 выходы.
Модуль 8 верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы (фиг.9) содержит компаратор 120. На чертеже также показаны информационные 121 - 122 и синхронизирующий 123 входы, синхронизирующие 126-127 выходы.
Модуль 9 контроля завершения процедуры анализа массива признаков объектов распознавания (фиг.10) содержит счетчик 130, компаратор 131, элемент 132 ИЛИ и элемент 133 задержки. На чертеже также показаны информационный 134 и счетные 135 - 136 входы, сигнальные 139-140 выходы.
Модуль 10 регистрации признаков объектов распознавания (фиг.11) содержит регистр 145, элемент 146 ИЛИ и элемент 147 задержки. На чертеже также показаны информационный 148, синхронизирующий 149 и установочные 150 - 151 входы, информационный 152 и синхронизирующий 153 выходы.
Все узлы и элементы системы выполнены на стандартных потенциально-импульсных элементах.
Удаленное автоматизированное рабочее место (АРМ) пользователя системы состоит из терминала, имеющего экран для отображения кодограмм запросов и сигналов системы, и клавиатуру персонального компьютера. Управление предъявлением считываемых изображений осуществляется с сервера базы данных системы (на чертеже не показано).
Система работает следующим образом.
Каждому классу объектов распознавания система ставит в соответствие идентификационный код признака принадлежности к этому классу объектов.
Далее коду каждого признака принадлежности к классу объектов распознавания система ставит в соответствие код величины пороговой дальности успешного распознавания объектов этого класса и адрес памяти базы данных сервера, называемый базовым, начиная с которого в памяти базы данных сервера системы хранятся коды цифровых изображений всех объектов этого класса.
Код величины пороговой дальности успешного распознавания объектов рассматриваемого класса выдается на АРМ пилота вертолета, который с помощью лазерного дальномера выставляет требуемую дальность и, позиционируя пилотажные очки на эту дальность, производит сканирование невидимого объекта на этом участке земной поверхности и передачу его изображения системе.
Система код полученного изображения физического объекта сравнивает с кодом нуля. Если коды совпадают, то система переходит к анализу следующего признака.
Если коды не совпадают, то система по коду признака идентифицирует базовый адрес сервера, начиная с которого в базе данных сервера хранятся цифровые изображения всех объектов из рассматриваемого класса.
Идентифицированный адрес базы данных пересылается на адресный вход сервера базы данных.
Сервер, опрашивая свои адресные входы, получает этот адрес и считывает из своей базы данных по выставленному системой адресу первое цифровое изображение объекта распознавания и возвращает его системе.
Полученное из базы данных сервера цифровое изображение объекта распознавания система сравнивает с кодом цифрового изображения, принятого с оптического датчика пилотажных очков пилота вертолета. Если коды цифровых изображений не совпадают, то система инкрементирует следующий адрес базы данных сервера, по которому выполняется считывание из базы данных сервера цифрового изображения следующего объекта рассматриваемого класса.
Цифровое изображение следующего объекта рассматриваемого класса также возвращается сервером системе для сравнения с кодом цифрового изображения объекта этого класса, принятого из оптической системы пилотажных очков пилота вертолета.
Процесс инкрементирования адресов базы данных сервера и последующего считывания из них цифровых изображений объектов рассматриваемого класса будет продолжаться до тех пор, пока не совпадут коды цифровых изображений.
В этом случае система фиксирует успешное распознавание объекта, считанного оптической системой пилотажных очков ночного видения. После этого система переходит к следующему признаку и описанный процесс повторяется.
Если код цифрового изображения, принятого из оптической системы пилотажных очков пилота вертолета, окажется равным нулю, то система также переходит к следующему признаку.
Весь описанный процесс завершается после полного анализа и обработки всех признаков, количество которых указывается в исходной кодограмме запроса.
Для запуска системы пользователь системы (пилот вертолета) на своем рабочем месте формирует кодограмму запроса, в которой указываются код первого характерного признака объектов распознавания и общее число всех характерных признаков объектов распознавания (Таблица 1):

Сформированная кодограмма с автоматизированного рабочего места пилота вертолета подается на информационный вход 11 системы, откуда поступает на информационный вход 32 модуля 1 и заносится в регистр 30 синхронизирующим импульсом, подаваемым на синхронизирующий вход 33 модуля 1 с синхронизирующего входа 15 системы.
Структура кодограммы в регистре 1 будет иметь следующий вид:
Код первого признака распознавания объектов с информационного выхода 35 модуля 1 пересылается как на информационный 49 вход модуля 2, так и на информационный 94 вход модуля 5.
При поступлении на информационный 49 вход модуля 2 этот код проходит через группу 45 элементов ИЛИ и подается на вход дешифратора 40. Дешифратор 40 расшифровывает код первого признака распознавания объектов и вырабатывает на одном из своих выходов высокий потенциал, поступающий на соответствующие входы элементов 42 - 44 И. Для определенности допустим, что высоким потенциалом с выхода дешифратора 90 будет открыт элемент 44 И по одному входу, ожидая поступление высокого потенциала по другому входу.
При поступлении на информационный 94 вход модуля 5 этот код проходит через группу 90 элементов ИЛИ и подается на вход дешифратора 85. Дешифратор 85 расшифровывает код первого признака распознавания объектов и вырабатывает на одном из своих выходов высокий потенциал, поступающий на соответствующие входы элементов 87 - 89 И. Для определенности допустим, что высоким потенциалом с выхода дешифратора 85 будет открыт элемент 89 И по одному входу, ожидая поступление высокого потенциала по другому входу.
В первом случае синхронизирующий импульс с синхронизирующего входа 33 модуля 1 задерживается элементом 31 задержки на время срабатывания регистра 30 и с синхронизирующего выхода 37 модуля 1 поступает на синхронизирующий 51 вход модуля 2. Далее этот импульс с синхронизирующего входа 51 модуля 2 проходит элемент 46 ИЛИ, задерживается элементом 47 задержки на время срабатывания дешифратора 40 и проходит через открытый по одному входу элемент 44 И на вход считывания фиксированной ячейки постоянного запоминающего устройства (ПЗУ) 41.
В фиксированной ячейке ПЗУ 41 содержится код величины пороговой дальности успешного распознавания объектов на земной поверхности в ночных условиях для всех объектов рассматриваемого класса, выдаваемый с информационного выхода 20 системы на автоматизированное рабочее место пилота вертолета.
Кроме того, синхронизирующий импульс с выхода элемента задержки 47 модуля 2 задерживается элементом 48 задержки на время считывания фиксированной ячейки ПЗУ 41, проходит на выход 54 модуля 2 и далее с сигнального выхода 22 системы выдается на АРМ пилота вертолета сигнал: «Введите код изображения объекта распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета».
Пилот вертолета по этим сигналам с помощью лазерного дальномера выставляет указанную величину пороговой дальности и, позиционируя пилотажные очки на объект в ночи, считывает изображение распознаваемого объекта и отправляет на информационный вход 12 системы.
Синхронизирующий импульс от пилота вертолета с синхронизирующего входа 16 системы подается на синхронизирующий 64 вход модуля 3 и, поступая на синхронизирующий вход регистра 60, заносит в него код цифрового изображения распознаваемого объекта, принятого на информационный 12 вход системы с оптического датчика пилотажных очков ночного видения пилота вертолета.
Далее цифровое изображение объекта распознавания, полученное с оптического датчика пилотажных очков ночного видения пилота вертолета, с информационного 67 выхода модуля 3 пересылается на информационный 75 вход компаратора 70 модуля 4.
Одновременно с этим синхронизирующий импульс с синхронизирующего входа элемента 64 модуля 3, задержанный элементом 62 задержки на время срабатывания регистра 60, пересылается с синхронизирующего выхода 68 модуля 3 на синхронизирующий 76 вход модуля 4 и разрешает сравнение кода цифрового изображения объекта распознавания на входе 75 компаратора 70 с кодом 0.
Если код цифрового изображения объекта распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета равен 0, то на выходе 78 компаратора 70 вырабатывается сигнал, который открывает по одному входу элемент 72 И.
В этом случае синхронизирующий импульс с входа 76 модуля 4 после задержки элементом 74 задержки на время срабатывания компаратора 70 с выхода 78 компаратора 70 проходит через открытый по одному входу элемент И 72 и с синхронизирующего выхода 81 модуля 4 поступает на счетный вход 135 модуля 9, проходит через элемент 132 ИЛИ и поступает на счетный вход счетчика 130 и инкрементирует его.
Если код цифрового изображения объекта распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета не равен 0, то на выходе 77 компаратора 70 вырабатывается сигнал, который открывает по одному входу элемент 71 И.
В этом случае синхронизирующий импульс с входа 76 модуля 4 после задержки элементом 74 задержки на время срабатывания компаратора 70 проходит через открытый по одному входу элемент И 71 и, во-первых, с синхронизирующего выхода 80 модуля 4 пересылается на синхронизирующий 96 вход модуля 5, задерживается элементом 92 задержки на время срабатывания дешифратора 85 и проходит через открытый по одному входу элемент 89 И на вход считывания фиксированной ячейки постоянного запоминающего устройства (ПЗУ) 86, В фиксированной ячейке ПЗУ 86 хранится базовый (начальный) адрес всех изображений объектов распознавания, описываемых характерным признаком, принятым на вход дешифратора 85.
Во-вторых, импульс с выхода элемента 71 И модуля 5, поступая на одни входы элементов группы 73 И, пропускает через них код цифрового изображения объекта распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета на информационный выход 79 модуля 5, пересылаемый далее на информационный 121 вход модуля 8.
Код базового адреса всех изображений объектов распознавания, описываемых текущим обрабатываемым характерным признаком, с информационного выхода 98 модуля 5 пересылается на информационный 103 вход модуля 6 и поступает на информационный вход счетчика 100, куда и заносится синхронизирующим импульсом с выхода элемента 92 задержки модуля 5, задержанным элементом 93 задержки на время считывания фиксированной ячейки ПЗУ 86 и переданным с синхронизирующего выхода 99 модуля 5 на синхронизирующий вход 104 модуля 6.
Этот же импульс с входа 104 модуля 6 проходит элемент 101 ИЛИ, задерживается элементом 102 задержки на время занесения в счетчик 100 базового адреса изображений объектов распознавания, выдаваемого на адресный выход 19 системы, и с синхронизирующего выхода 21 системы поступает на вход первого канала прерывания сервера.
С приходом этого импульса сервер переходит на подпрограмму опроса содержимого своей базы данных по адресу, сформированному на адресном выходе 19 системы, и выдачи из этого адреса считанного кода изображения объекта распознавания на информационный вход 13 системы.
Код изображения объекта распознавания с информационного входа 13 системы поступает на информационный вход 113 регистра 110 модуля 7, куда и заносится синхронизирующим импульсом сервера, поступающим на синхронизирующий вход 114 модуля 7 с синхронизирующего входа 17 системы.
Считанный из базы данных сервера системы код цифрового изображения объекта распознавания с информационного выхода 117 модуля 7 пересылается на информационный вход 122 модуля 8 и поступает на один информационный вход компаратора 120, на другом информационном 121 входе которого уже находится код цифрового изображения объекта распознавания, принятый с оптического датчика пилотажных очков ночного видения пилота вертолета.
Синхронизирующий импульс сервера с синхронизирующего входа 114 модуля 7 задерживается элементом 112 задержки на время срабатывания регистра 110 и с синхронизирующего выхода 118 модуля 7 пересылается на синхронизирующий вход 123 модуля 8 и разрешает сравнение кодов цифровых изображений объектов распознавания, принятых на информационные 121 и 122 входы компаратора 120.
Если коды цифровых изображений объектов распознавания на входах 121 и 122 компаратора 120 не совпадают, то на его 124 выходе вырабатывается сигнал, который с сигнального выхода 126 модуля 8 поступает на счетный 105 вход счетчика 100 модуля 6 и инкрементирует его, идентифицируя тем самым следующий адрес цифрового изображения следующего объекта распознавания, выдаваемый на адресный выход 19 системы,
Кроме того, импульс с счетного входа 105 модуля 6 проходит через элемент 101 ИЛИ, задерживается элементом 102 задержки на время инкремента счетчика 100 и с синхронизирующего выхода 21 системы поступает на вход первого канала прерывания сервера.
С приходом этого импульса сервер переходит на подпрограмму опроса содержимого своей базы данных по адресу, сформированному на адресном выходе 19 системы, и выдачи считанного из этого адреса кода изображения следующего объекта распознавания на информационный вход 13 системы.
Описанный процесс идентификации адресов кодов цифровых изображений объектов распознавания, считывания из них кодов и сравнения их на каждом шаге с кодом цифрового изображения объекта распознавания, принятого с оптического датчика пилотажных очков ночного видения пилота вертолета будет продолжаться до тех пор, пока из базы данных сервера системы не будет считан код цифрового изображения объекта распознавания, полностью совпадающий с кодом цифрового изображения объекта распознавания, принятого с оптического датчика пилотажных очков ночного видения пилота вертолета.
В этом случае уже на выходе 125 компаратора 100 модуля 8 вырабатывается сигнал, который, с сигнального выхода 127 модуля 8 поступает, во-первых, на установочный вход 105 счетчика 100 модуля 6, возвращая его в исходное состояние.
Во-вторых, этот сигнал с сигнального выхода 127 модуля 8 проходит на сигнальный выход 25 системы, откуда на автоматизированное рабочее место пилота вертолета выдается сигнал об успешном распознавании объекта на поверхности земли.
В-третьих, этот сигнал с сигнального выхода 127 модуля 8 поступает на счетный 136 вход модуля 9, проходит через элемент 132 ИЛИ и поступает на счетный вход счетчика 130 и инкрементирует его.
Таким образом, любой сигнал, поступающий на счетные входы 135 или 136 модуля 9, инкрементирует счетчик 130, подсчитывающий нарастающим итогом число проанализированных и обработанных характерных признаков распознавания объектов.
Поскольку к настоящему моменту проанализирован только первый признак распознавания объектов, то содержимое счетчика 130 будет равно единичке.
Установленное содержимое счетчика 130 подается на один информационный вход компаратора 131, на другой информационный вход 134 которого подается с информационного выхода 36 модуля 1 код общего числа всех признаков распознавания объектов (равный, например, 5).
По сигналу с выхода элемента 132 ИЛИ, задержанному элементом 133 задержки на время инкремента счетчика 130 и поданному на синхронизирующий вход компаратора 131, в компараторе происходит сравнение колов, принятых на его информационные входы.
Поскольку в счетчике 130 была зафиксирована только первая единичка, то содержимое счетчика 130 будет много меньше кода общего числа всех характерных признаков распознавания объектов.
В этом случае на выходе 137 компаратора 130 вырабатывается сигнал, который с сигнального 139 выхода модуля 9, во-первых, подается:
- на установочный вход 150 модуля 10, проходит элемент ИЛИ 146 и поступает на установочный вход регистра 145, подтверждая его нулевое состояние, или сбрасывает в ноль его содержимое и подготавливает его тем самым к новому циклу работы;
- на установочный вход 115 модуля 7, проходит элемент ИЛИ 111 и поступает на установочный вход регистра 110, сбрасывает в ноль его содержимое и подготавливает его тем самым к новому циклу работы;
- на установочный вход 65 модуля 3, проходит элемент ИЛИ 61 и поступает на установочный вход регистра 60, сбрасывает в ноль его содержимое, подготавливая его тем самым к новому циклу работы.
В-вторых, по этому сигналу с сигнального выхода 139 модуля 9 снимается сигнал-запрос «Введите код следующего характерного признака распознавания объектов», выдаваемый с сигнального выхода 23 системы на АРМ пилота вертолета (пользователя системы).
Пилот вертолета по этому запросу отправляет со своего автоматизированного рабочего места код следующего характерного признака распознавания объектов на информационный вход 14 системы.
Полученный от пилота вертолета код следующего характерного признака распознавания объектов с информационного входа 14 системы поступает на информационный вход 148 регистра 145 модуля 10, куда и заносится синхронизирующим импульсом от пилота вертолета, поступающим на синхронизирующий вход 149 модуля 10 с синхронизирующего входа 18 системы.
Принятый системой код следующего характерного признака распознавания объектов с информационного выхода 152 модуля 10 пересылается как на информационный 50 вход модуля 2, так и на информационный 95 вход модуля 5.
По импульсу с синхронизирующего выхода 143 модуля 10, подаваемому на синхронизирующий вход 32 модуля 2, коду нового характерного признака в модуле 2 ставится в соответствие новая величина пороговой дальности успешного распознавания объектов рассматриваемого класса.
По импульсу с синхронизирующего выхода 143 модуля 10, подаваемому на синхронизирующий вход 97 модуля 5, коду нового характерного признака в модуле 5 ставится в соответствие новый базовый адрес изображений объектов распознавания рассматриваемого класса
Описанный процесс приема и обработки характерных признаков объектов распознавания на поверхности земли, соотнесение каждому из них базового адреса цифровых изображений объектов распознавания в базе данных сервера, прием с оптического датчика пилотажных очков ночного видения пилота вертолета цифровых изображений объектов на поверхности земли с последующим их распознаванием будет продолжаться до тех пор, пока не будут обработаны все заявленные признаки.
Это произойдет тогда, когда содержимое счетчика 150 модуля 8 будет равно коду общего числа задаваемых характерных признаков распознавания.
В этом случае на выходе 155 компаратора 151 вырабатывается сигнал, который, во-первых, с выхода 155 компаратора 151 подается на установочный вход счетчика 150 и возвращает его в исходное состояние.
Во-вторых, этот сигнал с сигнального выхода 80 модуля 8 подается:
- на установочный вход 67 модуля 9, проходит элемент ИЛИ 161 и поступает на установочный вход регистра 160, сбрасывает в ноль его содержимое и подготавливает его тем самым к новому циклу работы;
- на установочный вход 61 модуля 6, проходит элемент ИЛИ 131 и поступает на установочный вход регистра 130, сбрасывает в ноль его содержимое и подготавливает его тем самым к новому циклу работы;
- на установочный вход 50 модуля 4, проходит элемент ИЛИ 112 и поступает на установочный вход регистра 110, подтверждая его нулевое состояние, или сбрасывает в ноль его содержимое, подготавливая его тем самым к новому циклу работы;
на установочный вход 30 модуля 1, выполненного в виде регистра, сбрасывает в ноль его содержимое и подготавливает его тем самым к новому циклу работы.
В-третьих, по этому сигналу с сигнального выхода 80 модуля 8 снимается сигнал «Анализ и обработка характерных признаков распознавания объектов с распознаванием по ним объектов на поверхности земли завершены», который с сигнального выхода 22 системы выдается на АРМ пользователя системы (пилота вертолета).
Таким образом, предложенное техническое решение позволило существенно повысить быстродействие системы путем выдачи результатов обработки получаемых данных по каждому из распознаваемых объектов на поверхности земли в реальном масштабе времени.
Источники информации, принятые во внимание при составлении описания заявки:
1. Патент РФ №2680652 (05.11.2017)
2. Патент РФ№2695490 (02.11.2017) (прототип).
Изобретение относится к области автоматики и вычислительной техники. Технический результат - повышение быстродействия системы путем выдачи результатов обработки получаемых данных по каждому из объектов распознавания в реальном масштабе времени - достигается тем, что система содержит модуль приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, модуль идентификации величины пороговой дальности успешного распознавания объектов одного класса, модуль приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, модуль идентификации базового адреса изображений объектов распознавания, модуль селекции адресов изображений объектов распознавания в базе данных сервера системы, модуль приема изображений объектов распознавания из базы данных сервера системы, модуль верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы, модуль контроля завершения процедуры анализа массива признаков объектов распознавания, модуль регистрации признаков объектов распознавания. 12 ил., 2 табл.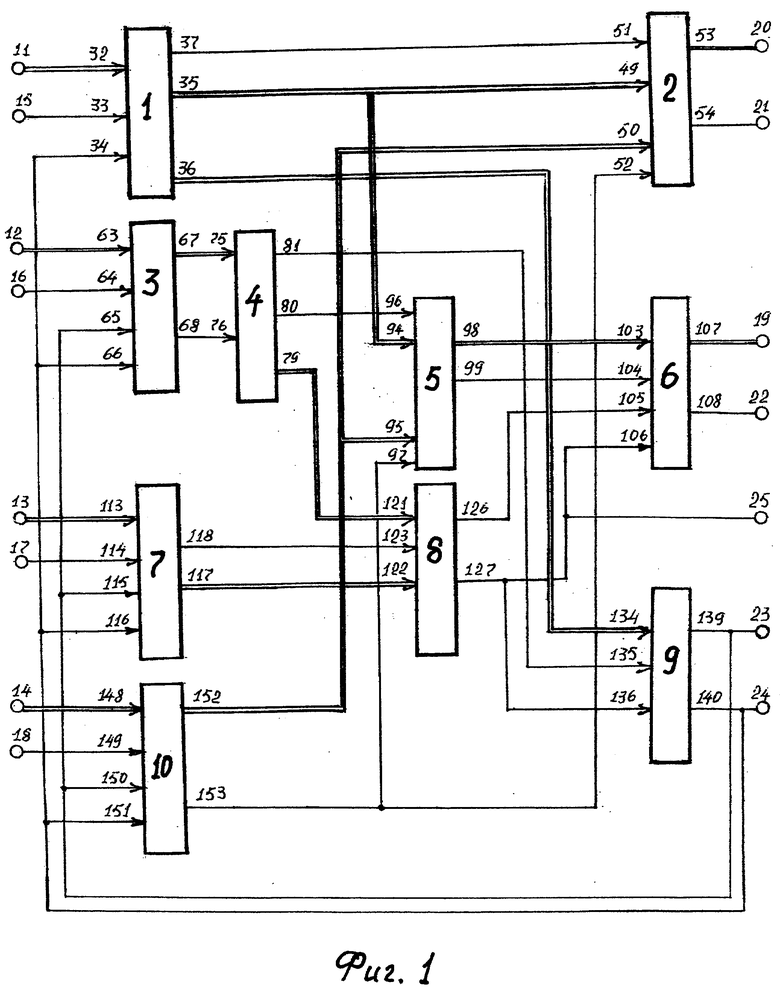
Система распознавания объектов на поверхности земли в условиях ночного поиска их характерных признаков с использованием оптической системы пилотажных очков ночного видения пилота вертолета, содержащая модуль приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, информационный вход которого является первым информационным входом системы, предназначенным для приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, синхронизирующий вход модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета является первым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения кодограммы запроса с автоматизированного рабочего места пилота вертолета в модуль приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, модуль идентификации величины пороговой дальности успешного распознавания объектов одного класса, первый информационный и первый синхронизирующий входы которого подключены к первому информационному и к синхронизирующему выходам модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета соответственно, информационный выход модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса является первым информационным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета кода величины пороговой дальности успешного распознавания объектов одного класса, синхронизирующий выход модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса является первым синхронизирующим выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета синхронизирующих сигналов запуска уведомлений пилоту вертолета о необходимости ввода данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, информационный вход которого является вторым информационным входом системы, предназначенным для приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, синхронизирующий вход модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета является вторым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения данных с оптического датчика пилотажных очков ночного видения пилота вертолета в модуль приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, модуль идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, информационный и синхронизирующий входы которого подключены к информационному и к синхронизирующему выходам модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета соответственно, модуль идентификации базового адреса изображений объектов распознавания, первый информационный вход которого подключен к первому информационному выходу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, первый синхронизирующий вход модуля идентификации базового адреса изображений объектов распознавания подключен к первому синхронизирующему выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, модуль приема изображений объектов распознавания из базы данных сервера системы, информационный вход которого является третьим информационным входом системы, предназначенным для приема изображений объектов распознавания из базы данных сервера системы, синхронизирующий вход модуля приема изображений объектов распознавания из базы данных сервера системы является третьим синхронизирующим входом системы, предназначенным для занесения записей базы данных сервера системы в модуль приема изображений объектов распознавания из базы данных сервера системы, модуль регистрации признаков объектов распознавания, информационный вход которого является четвертым информационным входом системы, предназначенным для приема кодов признаков объектов распознавания с автоматизированного рабочего места пилота вертолета, синхронизирующий вход модуля регистрации признаков объектов распознавания является четвертым синхронизирующим входом системы, предназначенным для приема синхронизирующих сигналов занесения кодов признаков объектов распознавания с автоматизированного рабочего места пилота вертолета в модуль регистрации признаков объектов распознавания, информационный выход модуля регистрации признаков объектов распознавания подключен ко второму информационному входу модуля идентификации базового адреса изображений объектов распознавания и ко второму информационному входу модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса, синхронизирующий выход модуля регистрации признаков объектов распознавания подключен ко второму синхронизирующему входу модуля идентификации базового адреса изображений объектов распознавания и ко второму синхронизирующему входу модуля идентификации величины пороговой дальности успешного распознавания объектов одного класса, модуль контроля завершения процедуры анализа массива признаков объектов распознавания, информационный вход которого подключен ко второму информационному выходу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета, первый счетный вход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен ко второму синхронизирующему выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, первый сигнальный выход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен к первому установочному входу модуля регистрации признаков объектов распознавания, к первому установочному входу модуля приема изображений объектов распознавания из базы данных сервера системы, к первому установочному входу модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета и при этом является первым сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала запроса ввода кода следующего признака объектов распознавания, второй сигнальный выход модуля контроля завершения процедуры анализа массива признаков объектов распознавания подключен ко второму установочному входу модуля регистрации признаков объектов распознавания, ко второму установочному входу модуля приема изображений объектов распознавания из базы данных сервера системы, ко второму установочному входу модуля приема данных с оптического датчика пилотажных очков ночного видения пилота вертолета, к установочному входу модуля приема кодограммы запроса с автоматизированного рабочего места пилота вертолета и при этом является вторым сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала завершения процедуры анализа массива признаков объектов распознавания, отличающаяся тем, что система содержит модуль верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы, первый информационный вход которого подключен к информационному выходу модуля идентификации отсутствия объектов распознавания в поле зрения оптического датчика пилотажных очков ночного видения пилота вертолета, а второй информационный и синхронизирующий входы модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы подключены к информационному и к синхронизирующему выходам модуля приема изображений объектов распознавания из базы данных сервера системы соответственно, первый синхронизирующий выход модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы подключен ко второму счетному входу модуля контроля завершения процедуры анализа массива признаков объектов распознавания и при этом является третьим сигнальным выходом системы, предназначенным для выдачи на автоматизированное рабочее место пилота вертолета сигнала успешного распознавания объекта, и модуль селекции адресов изображений объектов распознавания в базе данных сервера системы, информационный и синхронизирующий входы которого подключены к информационному и к синхронизирующему выходам модуля идентификации базового адреса изображений объектов распознавания соответственно, а счетный и установочный входы модуля селекции адресов изображений объектов распознавания в базе данных сервера системы подключены ко второму и к первому синхронизирующим выходам модуля верификации изображений объектов распознавания с оптического датчика пилотажных очков ночного видения пилота вертолета и из базы данных сервера системы соответственно, информационный выход модуля селекции адресов изображений объектов распознавания в базе данных сервера системы является адресным выходом системы, предназначенным для выдачи адресов изображений объектов распознавания на первый адресный вход сервера базы данных, а синхронизирующий выход модуля селекции адресов изображений объектов распознавания в базе данных сервера системы является вторым синхронизирующим выходом системы, предназначенным для выдачи сигналов управления считыванием кодов изображений объектов распознавания на вход первого канала прерывания сервера базы данных системы.
| СПОСОБ МОНИТОРИНГА СЕЛЬСКОХОЗЯЙСТВЕННЫХ УГОДИЙ | 2017 |
|
RU2695490C2 |
| УСТАНАВЛИВАЕМОЕ НА ГОЛОВЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И ВЫПОЛНЯЕМЫЙ ИМ СПОСОБ | 2017 |
|
RU2749643C1 |
| US 10108018 B2, 23.10.2018 | |||
| Система и способ защиты контролируемой зоны от беспилотных транспортных средств | 2019 |
|
RU2746102C1 |
| СПОСОБ КОМПЛЕКСНОГО МОНИТОРИНГА ПРИРОДНОЙ СРЕДЫ | 2017 |
|
RU2680652C2 |

