Техническое решение относится к области обнаружения в пространстве объектов, преимущественно с низкой информационной заметностью (малой вероятностью перехвата сигналов бортовой аппаратуры связи и передачи данных, радиолокационной планера, тепловой авиадвигателя, излучающей бортовых средств самолетовождения, навигации и управления оружием), и определения их местонахождения и параметров движения с необходимыми для практики ошибками по критериям возмущенной области атмосферы, называемой спутным инверсионным следом, на удалении более 350 км от органа управления группировки воздушно-космической обороны.
Известен способ разведки «стелс»-самолетов (в том числе сверхзвуковых и высотных), запатентованный в США как «Method of detecting a moving target using background radiation» или «Радар нового поколения» А.Ануашвили, с фоновым принципом получения информации. Авторы научного открытия «Закономерность проявления подвижности объекта» (Диплом №55, выдан 30.05.1997 г. на основании постановления РАН от 18.02.1992 г.), сделанного в Институте проблем управления РАН, академик Прангишвили И.В., доктора технических наук Ануашвили А.Н., Маклаков В.В. утверждают, что в полете объект-«невидимка» неизбежно оставляет «следы в атмосфере» и именно их может обнаружить радиолокатор. Суть изобретения А.Ануашвили состоит в том, что если зондирующие радиоволны генератора направить на фон (к примеру, ионосферу), то отраженные от фона вторичные волны создают колебания, согласованные с первичными сигналами. Когерентное протекание колебательных процессов (гармония) нарушается при появлении в поле прохождения радиоволн летательного аппарата-«невидимки», что и служит сигналом обнаружения. Колебания от вторичного генератора (фона) в блоке обнаружения приемника в фазовом смесителе смешиваются с излучениями первичного генератора и выделяется когерентная компонента, обозначающая степень гармонии (согласованности) колебательных процессов первичного и вторичного генераторов. Если в поле зрения нет подвижных объектов, то когерентность является максимальной. При появлении в поле прохождения радиоволн подвижного объекта согласованность по определенному закону нарушается (падает). Такое нарушение когерентности не зависит от степени «видимости» подвижного объекта. Невидимый объект не меняет амплитуду сигналов, но при движении изменяет фазу колебаний, поэтому возможно обнаружение невидимых («радиопрозрачных») фазовых объектов (см. патент США №6,707,488, приоритет от 04.05.1999).
Недостатком аналога является необходимость использования первичного генератора радиоволн, демаскирующего зондирующими сигналами позицию радиолокатора, который может быть выведен из строя самонаводящимися на источник радиоизлучения авиационными боеприпасами.
Также известен способ разведки по патенту РФ №2394255 от 26.05.2008, МПК G01S17/08, суть которого заключается в сканировании пространства антенной системой в составе попарно расположенных четырех антенн с находящейся посередине между разнесенными антенными парами точкой сканирования, при этом каждая пара антенн позиции приема образует равносигнальное направление. Во время функционирования пеленгационной системы фиксируют момент нахождения излучателя на равносигнальном направлении каждой пары антенн и определяют временной интервал между моментами нахождения объекта на равносигнальном направлении каждой пары антенн. Дальность до цели определяется отношением расстояния между равносигнальными направлениями пар антенн к произведению временного интервала между моментами нахождения излучателя на равносигнальном направлении каждой пары антенн и угловой скорости сканирования.
Способу присущи следующие недостатки: требуемое высокое постоянство скорости сканирования и аппаратурные ограничения реализации даже в светлое время суток дальнего обнаружения оптических объектов.
Дальность видения или видимость предмета в пространстве зависит от его цвета и размера, освещенности и фона (контраста), фотоэлектрических и технических характеристик телекамеры - радиометра излучений видимого и ближнего инфракрасного диапазонов оптических волн и определяется прозрачностью среды на пути прохождения фотонного потока. Уменьшение прозрачности воздуха является главной причиной ограничения и потери видимости любых объектов и огней. Если воздух у поверхности Земли не содержит ни аэрозолей, ни водяного пара, то есть идеально чистый и сухой, то ослабление солнечной радиации обусловливается только молекулярным рассеянием. В идеальной атмосфере при температуре воздуха у поверхности Земли 0°С максимальная метеорологическая дальность видения составляет 321 км. При температурах воздуха 20°С и -20°С она будет равна 344 и 297 км соответственно. Это означает, что на указанном выше расстоянии яркость атмосферной дымки, возникающей за счет молекулярного рассеяния в слое воздуха между глазом наблюдателя и видимым на фоне неба у горизонта черным телом, становится равной яркости неба у горизонта. Накладываясь на черный объект, дымка постепенно уменьшает контраст предмета с фоном (с небом) и доводит его до порога контрастной чувствительности глаза, когда предмет становится неотличимым от фона неба, то есть невидимым. Таким образом, в идеальной атмосфере на расстоянии в 321 км самый черный объект становится светлым. Любое не черное тело имеет меньший контраст с небом у горизонта, чем черное, то есть дальность видения других тел меньше метеорологической видимости. При возникновении оптических метеопомех (атмосферная дымка, облачность, мгла, туман), при снегопадах и метелях, дождях, песчаных и пыльных бурях прозрачность воздуха существенно уменьшается и фотонные потоки значительно ослабевают [Зверева С. В мире солнечного света. // Изд-во «Гидрометеоиздат», Л., 1988. - 160 с.].
За наиболее близкий аналог предлагаемому способу и системе разведки целесообразно принять приведенное в патенте РФ №2363018 от 06.11.2007, МПК G01S 17/06 устройство оптического наблюдения объекта на удаленном фоне, реализующее прием и формирование опорного и сравниваемого кадров изображений двумя идентичными с параллельными главными оптическими осями высокоскоростными фотоприемниками с CMOS-матрицами, которые расположены на небольшом относительно удаленного фона расстоянии друг от друга. В этом случае двумя видеосистемами одновременно синхронно регистрируются два изображения и формируются две разностные сцены, первая из которых образуется вычитанием сравниваемого кадра из опорного, а вторая - вычитанием опорного кадра из сравниваемого. Затем в разностных сценах отрицательные значения элементов кадра принимаются равными нулю, а угловым координатам каждого ненулевого фрагмента на первой разностной сцене ставят в соответствие величину сдвига между указанной областью и соответствующим ей фрагментом на второй разностной сцене до максимального их совпадения в направлении параллактического смещения фона, если есть такой фрагмент на второй разностной сцене в указанном направлении. Аналогично координатам каждой отличной от нуля области на второй разностной сцене ставят в соответствие величину сдвига между этой областью и соответствующим ей фрагментом на первой разностной сцене. Дальность до разведанной цели рассчитывается как отношение произведения расстояния между центрами объективов на интервал от фоточувствительной плоскости матрицы до главной оптической оси объектива видеосистемы к числовой величине параллактического сдвига области сцены.
К недостаткам прототипа относятся: грубые ошибки селекции в случае одновременной регистрации изображений групповых целей и аппаратурные пределы в реализации даже в светлое время суток дальнего обнаружения и определения местоположений оптических объектов.
Задачей предлагаемого технического решения является реализация дальнего оптического обнаружения летящего на большой высоте или в тропопаузе, либо в стратосфере сверхзвукового малозаметного летательного аппарата (к примеру, многоцелевого истребителя Ф-22А «Рэптор», бомбардировщика Б-1Б «Лансер», баллистической ракеты) - на удалении 350 км. точечного объекта - и определения его местоположения с требуемой для практики точностью с целью информационного обеспечения огневых воздействий по нему зенитно-ракетных систем с максимальной границей зоны поражения 220 км на высоте 8000…15000 м.
После боевых потерь американскими ВВС многоцелевых истребителей-»невидимок» Ф-117А «Найт Хоук» (в локальной войне в зоне Персидского залива 20 января 1991 г. «Ночной Ястреб» сбит тепловой ракетой иракского переносного зенитно-ракетного комплекса ближнего действия советского производства «Игла»; в войне на Балканах 27 марта 1999 г. в 20.25 в 32 км от Белграда в районе населенного пункта Будановцы Ф-117А уничтожен огнем сербского зенитно-ракетного комплекса малой дальности С-125М «Нева» советского производства, при этом сопровождение цели велось по данным тепловизора фирмы «Philips»; 5 апреля 1999 г. «Найт Хоук» во время атаки телебашни «Црвени Кот» сбит сербской ракетой с инфракрасной головкой самонаведения переносного зенитно-ракетного комплекса «Игла»; 20 мая над Косово Ф-117А уничтожен двумя тепловыми ракетами, выпущенными истребителем советского производства МиГ-29 ВВС Югославии; 1 апреля на аэродроме Плесо г.Загреб в Македонии совершил вынужденную посадку «Ночной Ястреб», получивший боевые повреждения от огня средств ПВО Сербии), способных выполнять воздушные атаки на дозвуковой скорости и вынужденных с малых и средних высот применять основное вооружение - авиабомбы с лазерным наведением - из-за непрозрачности атмосферы по причинам облачности и метеопомех. Пентагон изменил тактику действий пилотируемой авиации в пользу принятия на вооружение авиационных боеприпасов типа JDAM с комбинированной системой наведения INS/GPS (инерциально-спутниковой) и выполнения миссий ударными самолетами на больших (8…12 км) высотах в темное время суток со сверхзвуковой скоростью при обязательной поддержке разведданными воздушных кораблей дальнего радиолокационного обнаружения Е-3А «Сентри». Уже в конфликте 1999 г. на Балканах стратегические бомбардировщики-»невидимки» Б-2А «Спирит» и сверхзвуковые Б-1Б выполняли бомбометание с высот 12000 м и 10000 м соответственно. В ходе операций «Enduring Freedom» 2001 г. в Афганистане и «Iraqi Freedom» 2003 г. в Ираке боевые корабли Б-2А с низкой информационной заметностью применяли авиационные средства поражения с большой (9…12 км) высоты. В апреле 2012 г. на учениях «Operation «Chimichanga» по отработке концепции сверхдальних внезапных ударов выполненные с использованием технологии «Стеле» бомбардировщики Б-1Б и многоцелевые истребители-»невидимки» 5-го поколения Ф-22А «Рэптор» производили бомбометание авиационных боеприпасов JDAM с высот 10 км и 12 км соответственно на сверхзвуковой скорости при информационной поддержке самолетов Е-3А системы АВАКС [Зверев А. Учения ВВС США «Операция «Чимичанга». // «Независимое военное обозрение», №6, 2012 г. - с.66…69]. При выполнении боевых миссий ударными кораблями Б-1Б и Б-2А и многоцелевыми истребителями Ф-22А на высоте большей 7000 м будут иметь место оптические признаки нахождения самолетов в атмосфере (технические демаскирующие признаки работы авиадвигателей) - инверсные следы их силовых установок - искусственные перисто-кучевые облака (в метеорологической классификации «дорожные» - «Cirrocumulus tractus», Ci trac), образующиеся на расстоянии 200…300 м от сопел и видимые (в условиях идеальной атмосферы) на удалении более 320 км [Егоров Б., Кабанов Б., Щипин С. След в небе. // «Авиация и космонавтика вчера, сегодня, завтра…«, №8, 2001 г.].
Поставленная задача дальней пассивной оптической разведки сверхзвукового высотного летательного аппарата с низкой информационной заметностью в предлагаемой технической реализации решается благодаря тому, что предусматривается комплексное использование максимально возможных в реальных условиях числовых величин, составляющих видимости предмета в пространстве: цвета и размера объекта, освещенности и фона (контраста протяженного облака «след самолета» на фоне неба), фотоэлектрических и технических характеристик телекамеры (чувствительности фотоприемника - квантовой эффективности фотоэлектрического преобразователя на базе ПЗС-матрицы), прозрачности среды на пути прохождения отражений солнечной радиации от поверхности цели до сенсора (снижение негативного влияния облачности и метеопомех посредством размещения радиометра видимого и ближнего инфракрасного диапазонов оптических волн выше естественных облаков). Идея оптимального решения задачи заключается в выборе в качестве объекта разведки телекамерами, оснащенными фотоприемниками с высокочувствительными крупноформатными ПЗС-матрицами, радиометров не малоразмерной цели (точечной), а видимого на большом расстоянии эмитируемого авиадвигателем летательного аппарата спутного инверсного, контрастного на фоне неба, следа (протяженного) и организации близких к идеальным условий видимости путем размещения круглосуточных телекамер в гиростабилизированных платформах на бортах беспилотных вертолетов, что также позволяет увеличить дальность поиска и местоопределения цели посредством выноса зоны патрулирования необитаемых машин. Критериями обнаружения инверсного следа силовой установки высотного сверхзвукового воздушного объекта являются: числовая величина коэффициента отражения поверхностью цели солнечной радиации - альбедо; форма в виде прожилки в небе (полосы в виде ленты на фоне безоблачного неба); превышающая более чем в 1,2 раза число Маха скорость перемещения переднего среза (фронта) искусственного перисто-кучевого облака «след самолета». Образующиеся в диапазоне высот естественных перистообразных облаков верхнего яруса Ci «дорожные» облака Ci trac возникают в зоне остывающих выхлопных газов авиадвигателя самолета при более высоких, чем окружающая атмосфера, температурах, поэтому микрокристаллы льда в них имеют форму ледяных микрокристаллов природных высокослоистых облаков среднего яруса (As). Облака различного состава и происхождения по-разному отражают радиацию Солнца (отличаются значениями критериев альбедо) [Бухаров М., Волкова Е. Методические вопросы распознавания инверсионных следов от пролета самолетов над облачностью по многоспектральным измерениям с ИСЗ NOAA.II IV всероссийская открытая конференция. Современные проблемы зондирования Земли из космоса. Москва, 13…17 ноября 2006 г.Сборник тезисов конференции]. Сверхзвуковой считают скорость, которая более чем в 1,2 раза превышает число Маха (М) - безразмерную величину, равную отношению скорости движущейся среды к местной скорости звука. Скорость звука изменяется с высотой; у поверхности Земли она составляет 340 м/с; на высоте 11000 м - 295 м/с. Скорость распространения звука в атмосфере равна произведению числа 20,1 на корень квадратный из температуры (в градусах по шкале Кельвина) окружающей среды на заданной высоте. В стандартной атмосфере при увеличении высоты до 11 км температура падает на 6,5 град. на каждые 1000 м, выше - остается постоянной; на высоте 7 км температура среды составляет около минус 30°С (243,15°К); на 9 км - 235,7°К; на 10 км - 234,2°К; на 11000 м - 232,54°К. При этом точность измерения телекамерами угловых координат фронта инверсионного следа определяется разрешающей способностью «смотрящего» фотоприемника, которая ограничивается только топологией дискретности фоточувствительной поверхности ПЗС-матрицы и напрямую зависит от числа элементов (пикселов) кристалла ПЗС-мозаики. Если спектральный канал радиометра оснащается объективом с длинным фокусом и укомплектовывается крупноформатной ПЗС-матрицей, то ошибка измерения углов составляет единицы угловых секунд, что в совокупности с оперативностью ориентации в пространстве носителей вертолетного типа создает условия применения самого простого и надежного метода пассивной координатометрии отражателя солнечной радиации - триангуляционного (угломерного, пеленгационного) с погрешностью вычисления плоскостных координат источника оптического излучения в несколько десятков метров. Следовательно, предлагаемая система дальнего оптического обнаружения и определения местоположения летящего в стратосфере или на большой высоте со сверхзвуковой скоростью объекта по критериям конденсационного следа его силовой установки в атмосфере представляет собой мобильный угломерный комплекс в составе связанных между собой радиолиниями обмена цифровой информацией разведданных, донесений и команд наземного мобильного опорного пункта обработки информации и управления сенсорами и носителями и трех-четырех удаленных обзорно-прицельных вертолетных постов, позиции которых оперативно ориентируются согласно требованиям режима функционирования угломерной системы.
Техническое решение позволяет реализовать обнаружение, измерение угловых координат, пространственное местоопределение с необходимыми для практики погрешностями и траекторное сопровождение объектов с низкой информационной заметностью, летящих со сверхзвуковой скоростью в стратосфере, в тропопаузе и на больших высотах и создающих за собой области возмущения воздушного пространства (то есть спутные инверсные следы). Способ и система дальнего оптического обнаружения и определения местоположения сверхзвуковой высотной цели по оптически видимому ее конденсационному следу в атмосфере заключаются в приеме отраженной от протяженного объекта солнечной радиации тремя или более бортовыми радиометрами беспилотных вертолетов, позиции которых разнесены на заданное расстояние в пространстве, при этом коэффициент отражения фотонного потока (альбедо), форма в виде прожилки (полосы в виде ленты) на фоне неба и путевая скорость перемещения фронта перисто-кучевого искусственного "дорожного" облака классифицируют его как инверсионный след летящего на большой высоте или в стратосфере самолета-"невидимки". Для измерения угловых координат местонахождения объекта и определения его параметров движения используется контраст инверсного следа на фоне безоблачного неба. Плоскостные координаты местоположения воздушной цели вычисляются алгоритмически угломерным методом по азимутам переднего среза конденсационного следа, измеренным крупноформатными (с высокой разрешающей способностью) ПЗС-матрицами фотоприемников видимого и ближнего инфракрасного диапазонов оптических волн телекамер спектральных каналов радиометров. Скорость объекта принимается равной скорости перемещения фронта инверсионного следа. Высота полета цели рассчитывается как функция горизонтальной дальности, угла места фронта конденсационного следа и радиуса Земли. Курс (вектор движения) объекта разведки принимается равным вектору перемещения инверсионного следа.
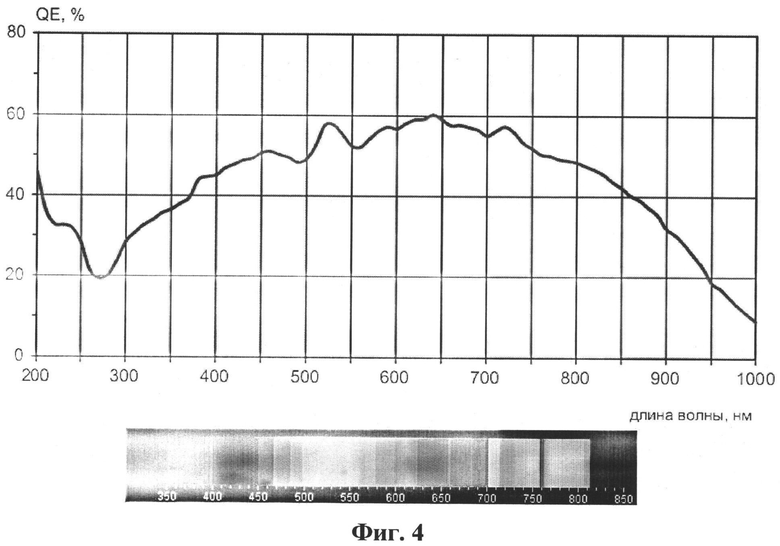
Для пояснения технического решения представлены графические документы. На фиг.1 приведена структурная схема системы дальнего оптического обнаружения и определения местоположения летящей в стратосфере или на большой высоте со сверхзвуковой скоростью цели по критериям инверсного следа ее силовой установки в атмосфере; на фиг.2 - функциональная схема угломерного оптико-электронного комплекса дальней оптической разведки летящего в стратосфере или на большой высоте со сверхзвуковой скоростью объекта по критериям инверсионного следа его авиадвигателя в атмосфере; на фиг.3 - характеристики матриц ПЗС телекамер S3C/077 и S4C/085; на фиг.4 - зависимость квантовой эффективности ПЗС-матрицы ELCM1077 фотоприемника S3 С от длины волны солнечной радиации.
Описанное выше техническое решение способа и системы дальнего оптического обнаружения и определения местоположения летящего в стратосфере или на большой высоте со сверхзвуковой скоростью объекта по критериям конденсационного следа его силовой установки в атмосфере осуществляется следующим образом: отраженная от контрастного на фоне чистого неба протяженного объекта солнечная радиация регистрируется совокупностью формирующих двумерные кадры оптических (световых) изображений ПЗС-матриц типа ELCM1077 (формат 1160×1040 элементов; размер пиксела 16×16 мкм) и ELCM1085 (формат 2300×2050 элементов; размер пиксела 8,2×8,2 мкм) - см. фиг.3 - фотоприемников S3C и S4C (усредненный по видимому диапазону 400…750 нм оптических волн квантовый выход 0,57; усредненный по ближнему инфракрасному диапазону 750…900 нм оптических волн квантовый выход 0,4 - см. фиг.4) цифровых телекамер S3C/077 и S4C/085 (в короткофокусном 50 мм режиме широкое поле зрения 25°×22,4°; узкое поле зрения 3°×2,8° в длиннофокусном 120 мм режиме), изделия группы компаний «СИЛАР - ЭЛАР» (г.Санкт-Петербург), установленных в гиростабилизированных платформах СОН-730 (четкость стабилизации изображения по углу места, азимуту и крену; диапазон углов обзора: в азимутальной плоскости 360°; в угломестной от +10° до -90°) ОАО «ПО «Уральский оптико-механический завод» им. Э.С.Яламова» (УОМЗ г.Екатеринбург), которые размещаются на бортах винтокрылых роботов БПВ-500 «Роторфлай» (вес полезной нагрузки 180 кг; продолжительность полета 8 ч. на высоте от 50 м до 4 км и удалении до 150 км от наземного пункта наведения) ОАО «НПП «Радар ММС» (г.Санкт-Петербург), при этом беспилотные вертолеты строятся в боевой порядок «прямоугольный равнобедренный треугольник» с гипотенузой (базой) 45 км, ориентируемой перпендикулярно к направлению на объект разведки. Тогда совокупность взаимосвязанных исполнителей (операторов-расшифровщиков) и средств автоматизации наземного пункта сбора разведданных и управления обзорно-прицельными сенсорами (ПУ) в составе трех модулей сопряжения сервера с телекамерами каналов радиометров воздушного базирования, центрального производительного, с отлаженным программным обеспечением, компьютера цифровой обработки видеоинформации, трех эргономичных рабочих мест, взаимодействующая с расположенными на бортах винтокрылых роботов радиоэлектронной и оптической аппаратурой, которая производит съемку пространства выше природных облаков, преобразование кадров изображений в электрические сигналы, осуществляет накопление и передачу данных на ПУ по цифровым радиолиниям, представляет собой автоматизированную систему управления (АСУ) боевым применением оптико-электронного комплекса (ОЭК). К примеру, видеосистема «Силар» включает три цифровые прецизионные телекамеры типа S3C/077, соосно совмещенные с тремя малокадровыми ПЗС-камерами S4C/085, и устройства информационного сопряжения каналов с ЭВМ-сервером ПУ, служащие для формирования интерфейсов между компьютером и телекамерами, создания многокамерных видеосистем, преобразования интерфейсов, подключения камер к локальной сети Ethernet. Совокупность взаимосвязанных исполнителей (операторов-пилотов), аппаратуры автоматизации пункта наведения роботов-автожиров с узлом цифровой связи и передачи данных (ПУ) и аэродромных средств обеспечения взлета/посадки, взаимодействующая с тремя необитаемыми геликоптерами, - это АСУ боевыми действиями беспилотного авиационного комплекса (БАК) вертолетного типа с максимальным рубежом удаления винтокрылых роботов до 150 км. Например, в составе БАК «Радар» в мобильном варианте находятся наземный ПУ, три беспилотных вертолета БПВ-500 «Роторфлай» и сменные комплекты полезной нагрузки (целевого бортового оборудования). Объединение АСУ боевым применением ОЭК с АСУ боевыми действиями БАК вертолетного типа образует АСУ боевым функционированием мобильного угломерного комплекса секторного обзора и дальней оптической разведки летящих с превышающей более чем в 1,2 раза число Маха скоростью в стратосфере или в тропопаузе либо на большой высоте малозаметных летательных аппаратов по инверсионным следам их авиадвигателей в атмосфере (см. фиг.1).
Выбор в качестве объекта разведки протяженного инверсного следа силовой установки самолета с альбедо 0,99 и фона на высоте 3000…3500 м - чистого неба с альбедо 0,1 [Гальперин А. Определение фотографической экспозиции. - М.: Изд-во «Искусство», 1955] позволяет получить яркостный контрастно объекта [Смелков В. Экспресс-расчет дальности наблюдения телевизионной системы.// «Специальная техника», №5, 2004 г.]:
где νОБ, νФ - альбедо в видимом (ближнем ИК) диапазоне оптических волн объекта и фона соответственно;
с числовой величиной 0,8165.
Применение круглосуточных телекамер S3C/077, оснащенных матричными фотоприемниками S3C с усредненным по видимому диапазону 400…750 нм квантовым выходом 0,57; усредненным по ближнему инфракрасному участку 750…900 нм квантовым выходом 0,4 [Вишневский Г., Косов В., Нестеров В., Четвергов М., Выдревич М., Ривкинд В. Формирователи видеосигнала в телекамерах и цифровых фотоаппаратах. 4.1., II. Разработки и производство ФПЗС и цифровых камер на их основе. // Интернет-журнал «Телефото Техника», СПб, 01.11.2008. http://www.telephototech.ru], временем накопления фотонов элементами матрицы 20 мс, дает возможность получить пороговую чувствительность радиометров КЕпор. [Цыцулин А. Телевидение и космос. // Издание «СПб ГЭТУ «ЛЭТИ»«, СПб, 2003 г., с.98]:

здесь mФпор. - пороговое отношение сигнал/шум; для фотоприемника S3C на базе ПЗС-матрицы ELCM1077 mФпор.=3, Е - освещенность сцены; Е принимается равной 50 лк; D/f - относительное отверстие объектива; τ - коэффициент пропускания объектива; для объектива с фокусным расстоянием 120 мм τ=0,785; D/f=0,555; N - потенциально доступное ПЗС количество фотонов за время 1 с на площадке в 1 см2 при освещенности 1 лк; для матрицы ELCM1077 N=2×1012; г/ - квантовый выход ПЗС-матрицы ELCM1077; Δ2 - площадь элемента матрицы в см2; для ПЗС-матрицы ELCM1077 площадь элемента составляет 256 мкм2; Δ2=2,56×10-6 см2; ТН - время накопления фотонов пикселами матрицы;
с числовой величиной 0,00484 или 0,484%.
Размещение радиометров на высоте 3…3,5 км позволяет создать условия съемки с объемным показателем рассеяния атмосферы на пути прохождения фотонных потоков (прозрачности среды на пути прохождения солнечной радиации) с числовой величиной, определяемой зависимостью изменения контраста Как вдоль оптического пути в среде [Смелков В. Экспресс-расчет дальности наблюдения телевизионной системы. // «Специальная техника», №5, 2004 г.]: 
где σ - постоянная величина, задаваемая в конкретной ситуации условием метеорологической дальности видения.
По определению за величину метеорологической видимости принимается такое максимальное расстояние, с которого черное тело видно с контрастом 2%. Если на высоте 3000…3500 м метеорологическая дальность видения составляет 230 км, то, согласно формуле (3), коэффициент ослабления фотонного потока атмосферой σ=0,000017 м-1.
Комплексное использование в техническом решении протяженного инверсионного следа в качестве контрастного объекта разведки на фоне безоблачного неба, оснащенных высокочувствительными фотоприемниками S3C с ПЗС-матрицами ELCM1077 прецизионных телекамер S3C/077 в роли спектральных каналов радиометров воздушного базирования, размещенных в пространстве с объемным показателем рассеяния среды на пути прохождения фотонных потоков σ=1,7×10-5 м-1 предоставляет возможность получить максимальный рубеж наблюдения, согласно формуле (3), с числовой величиной, превышающей 301,5 км в светлое время суток. В формуле (3) произведение квантовой эффективности ПЗС-матрицы ELCM1077 на время накопления фотонов пикселами составляет 0,0114 с. Если усредненный по ближнему ИК участку оптического спектрального диапазона квантовый выход ПЗС-матриц ELCM1077 принять равным 40%, то инверсионный след силовой установки малозаметного высотного объекта с контрастом 81,65% относительно фона может наблюдаться в темное время суток телекамерами серии S3C на рубеже 300 км при условии метеорологической дальности видения 230 км и увеличении времени накопления поля (кадра) до 30 мс.
Удаление вертолетных постов приема отражений солнечной радиации на расстояние до 150 км [Щербаков В. Беспилотники «Радара». // «Беспилотная авиация», интернет-портал UAV.RU] от наземного пункта обработки данных и управления (максимальный рубеж выноса зоны патрулирования роботов-автожиров ограничивается предельным радиусом цифровой связи) позволяет получить максимальную дальность разведки более 450 км.
Построение необитаемых геликоптеров в боевой порядок «прямоугольный равнобедренный треугольник» с базой 45 км и оперативная реконфигурация позиций, применение телекамер S3C/077 и S4C/085 (широкое поле зрения в короткофокусном 50 мм режиме 25°×22,4°; узкое поле зрения 3°×2,8° в режиме с длинным 120 мм фокусом) с ПЗС-матрицами ELCM1077 (формат 1160×1040 элементов) и ELCM1085 (формат 2300×2050 элементов) дает возможность измерять угловые координаты фронта конденсационного следа с точностью: 0,75 угл. минуты в режиме с 50 мм фокусом; 4,7 угл. секунд в узком поле зрения ELCM1077; 0,4 угл. минуты в широком поле зрения и 2,5 угл. секунды в режиме с 120 мм фокусом ELCM1085; что позволяет осуществлять расчет плоскостных координат излучателя с ошибкой σX,Y [км] [Обзор современных систем позиционирования мобильных телефонов. // «Специальная техника», №6, 2001 г.]:

где β [град.] и β1 [град.] - значения измеренных прилежащих к базе углов;
σβ [град.] - ошибка измерения базового угла; Б [км] - база системы;
с числовой величиной: менее 800 м на этапе обзора - обнаружения; не более 70 м на этапе наблюдения - прицеливания радиометрами S3C/077; до 425 м на этапе обзора - обнаружения; до 40 м на этапе наблюдения - прицеливания телекамерами S4C/085. При этом, согласно теореме синусов, горизонтальная дальность d до точки пересечения линий визирования [Мельников Ю. Воздушная радиотехническая разведка (методы оценки эффективности). - М.: «Радиотехника», 2005. - 304 с.: ил.]:
в случае β=β1 - из свойств равнобедренного треугольника: d=E/2cosβ.
Обнаружение траектории движения (автозахват на сопровождение) объекта, построение трассы его полета в пространстве (сопровождение), вычисление путевых параметров изменения положения цели в интересах потребителей с равным (или большим) времени экспонирования (накопления) периодом обновления данных 20 мс (30 мс) реализуются в процессе функционирования алгоритмов первичного анализа кадров и вторичной обработки оптической информации (изображений) центральной ЭВМ опорного ПУ.
Автоматизированная система обработки видеоинформации и управления боевым функционированием мобильного угломерного комплекса секторного обзора и дальней оптической разведки летящих с превышающей более чем в 1,2 раза число Маха скоростью в стратосфере или в тропопаузе, либо на большой высоте малозаметных летательных аппаратов по конденсационным следам их авиадвигателей в атмосфере выполняет функции предназначения следующим образом. После построения в зоне патрулирования беспилотных вертолетов БПВ-500 «Роторфлай» в боевой порядок спектральные каналы (совмещенные цифровые камеры) бортовых сенсоров осуществляют поиск искусственных перисто-кучевых "дорожных" облаков типа "след самолета" на этапе "обзора - обнаружения" в широком поле зрения (в секторе 25 град, по азимуту и 22,4 град, по углу места) - в 50 мм короткофокусном режиме, при этом на удалении 300 км от базы суммарный сектор обзора видеосистемы многопозиционного угломерного комплекса дальней оптической разведки составит 75 град, (более 420 км). В случае обнаружения в ответственном секторе какого-либо радиометра искусственного облака "след самолета" на наземном мобильном опорном ПУ измеряются угловые координаты фронта конденсационного следа авиадвигателя высотного летательного аппарата (ЛА), выдаются на беспилотные вертолеты распоряжения по ориентированию их позиций в боевой порядок "прямоугольный равнобедренный треугольник" с гипотенузой, ориентированной перпендикулярно направлению на объект разведки. После отработки ЦУ и захвата на сопровождение фронта облака "след самолета" тремя (или более) телекамерами сервер ПУ рассчитывает пространственное местонахождение и завязывает новую трассу воздушного объекта. Затем вычисляются параметры движения цели и, если курс полета высотного ЛА - встречный, а курсовой параметр соответствует зоне огня обеспечиваемой группы зенитно-ракетных систем дальнего действия (ЗРС ДД), то новой трассе присваивается признак "важная" и настраиваются телекамеры видеосистемы вертолетного БАК для функционирования в узком поле зрения 3°×2,8° - с 120 мм фокусным расстоянием объектива. Далее спектральными каналами радиометров измеряются угловые координаты цели с точностью 4,7 угл. секунд, затем расчет ее плоскостного местонахождения угломерным методом с погрешностью до 70 м центральным компьютером ПУ и выдача боевой информации на командный пункт группы ЗРС ДД. Автоматизированная система управления боевым применением ОЭК имеет в своем составе образующие единое целое информационную, управляющую и исполнительную подсистемы. Информационно-аналитическая подсистема включает три размещенных на гиростабилизированных платформах СОН-730 круглосуточных телевизионных комплекса, каждый из которых состоит из видимого на базе прецизионной малокадровой цифровой S3C/077 камеры 1 и ближнего инфракрасного на базе прецизионной малокадровой цифровой S4C/085 камеры 2 спектральных каналов. Оптико-электронными изделиями СОН-730 укомплектовываются автоматические необитаемые геликоптеры БПВ-500 «Роторфлай» БАК «Радар». С выходов телекамер 1 и 2 цифровые кадры изображения в различных спектральных зонах с помощью модуля аппаратуры связи и передачи данных 3 передаются по линии радиосвязи в центральный сервер наземного ПУ для более сложной обработки. Комплект технических средств управляющей подсистемы АСУ включает: три модуля аппаратуры связи и передачи данных 3, три модуля сопряжения сервера со спектральными каналами радиометров воздушного базирования 5, ведущий компьютер обработки видеоинформации 6, приемник спутниковой системы навигации «ГЛОНАСС» 4, память базы данных 7, три автоматизированных универсальных рабочих места, каждое из которых состоит из сборки изделия отображения и управления ОЭК 8 и изделия отображения и управления БАК вертолетного типа 9. Принятые с бортов трех беспилотных вертолетов тремя модулями аппаратуры связи и передачи данных 3 цифровые видеокадры изображений телекамер 1 и 2 посредством трех модулей сопряжения каналов сенсоров воздушного базирования с сервером 5 вводятся в память ведущего компьютера 6 ПУ. Одновременно с выходов спутниковых навигационных приемников 4 с помощью модулей аппаратуры связи и передачи данных 3 на наземный ПУ в ведущую ЭВМ 6 передаются пространственные координаты местоположений носителей информационно-аналитических элементов АСУ боевым применением ОЭК. Программное обеспечение центральной ЭВМ 6 реализует обнаружение сверхзвукового высотного объекта-"невидимки" по числовым величинам путевой скорости перемещения фронта контрастного протяженного конденсационного следа его силовой установки и альбедо этого следа, измерение относительных угловых координат переднего среза инверсного следа цели на каждом кадре, определение угломерным методом плоскостных координат и вычисление по измеренным азимутам и углам места высоты полета, автозахват трассы на сопровождение, автоматическое построение траектории движения наблюдаемого объекта, расчет параметров изменения положения цели с периодом обновления данных 20 мс (30 мс) и отображение разведанных и справочных сведений на экранах мониторов автоматизированных рабочих мест (АРМ) операторов ОЭК 8 и АРМ пилотов БАК 9. При этом, в случае обнаружения объекта разведки, вырабатываются команды ЦУ - управления положением бортовых гиростабилизированных платформ СОН-730; телекодовые посылки ЦУ через модули сопряжения каналов сенсоров воздушного базирования с сервером 5, модули аппаратуры связи и передачи данных 3, ПУ, линию радиосвязи, бортовые модули аппаратуры связи и передачи данных 3 роботов вертолетного типа поступают на приводы СОН-730. После присвоения наблюдаемому воздушному объекту признака "важный" и формирования управляющих воздействий на переход телекамер 1 и 2 в режим "наблюдения - прицеливания", кодограммы установки фокусов объективов с выхода центральной ЭВМ 6 через модули сопряжения сервера с каналами сенсоров воздушного базирования 5, модули аппаратуры связи и передачи данных 3 ПУ, линию радиосвязи, бортовые модули аппаратуры связи и передачи данных 3 беспилотных вертолетов проходят на микродвигатели вариообъективов прецизионных видеокамер. Предлагаемое техническое решение позволяет получить указанные ниже технические результаты. Круглосуточный рубеж разведки малозаметных ЛА, летящих на большой высоте, в тропопаузе, в стратосфере с превышающей более чем в 1,2 раза число Маха скоростью, по конденсационным следам их силовых установок в атмосфере - более 450 км. Трассовое сопровождение контрастных протяженных объектов разведки и определение плоскостных координат фронтов искусственных облаков "след самолет" радиометрами S3C/077 с ошибкой менее 800 м на этапе обзора-обнаружения; до 70 м на этапе наблюдения - прицеливания; телекамерами S4C/085 не более 425 м на этапе обзора-обнаружения; до 40 м на этапе наблюдения-прицеливания. По критерию "эффективность-стоимость" производится оценка следующим образом: обзорно-прицельный комплекс наблюдения на базе оптических радиометров в 5…10 раз дешевле по сравнению с традиционными низкочастотными активными радарами; применение с целью тактической разведки армейского ранга необитаемых геликоптеров на порядок дешевле в эксплуатации, чем при использовании для выполнения аналогичных функций ситуационной осведомленности управляемых пилотами вертолетов Ми-8. Таким образом, предлагаемое техническое решение позволяет:
1) организовать в группировке мобильных зенитно-ракетных сил и средств ВКО круглосуточный рубеж разведки боевых ЛА с низкой информационной заметностью, летящих со сверхзвуковой скоростью в стратосфере, тропопаузе и на большой высоте, по образующимся на расстоянии до 200 м от сопел их двигателей инверсным следам в воздухе с числовой величиной более 450 км;
2) реализовать сопровождение целей в пространстве с необходимыми для практики погрешностями, расчет параметров движения объектов в интересах потребителей с периодом обновления видеоданных, равным (или большим) времени экспонирования (накопления фотонов) 20 мс - в светлое время суток (30 мс - при низкой освещенности);
3) обеспечить высокие критерии живучести боевого функционирования мобильной угломерной системы секторного обзора и дальней оптической разведки летящих со сверхзвуковой скоростью на большой высоте или в тропопаузе, либо в стратосфере малозаметных летательных аппаратов по инверсионным следам их силовых установок (боевой устойчивости - за счет применения пассивного режима круглосуточного всепогодного наблюдения и оперативного перестроения боевого порядка необитаемых геликоптеров; эксплуатационной надежности - вследствие возможности использования отдельных устройств ОЭК и БАК в качестве "горячего резерва": в комплекте СОН-730 две телекамеры; в комплекте БАК три беспилотных вертолета; в комплекте ПУ три универсальных АРМ);
4) снизить стоимость обзорно-прицельного комплекса наблюдения на базе оптико-электронных радиометров с матричными фотоприемниками в 5…10 раз по сравнению с традиционными низкочастотными активными радарами; уменьшить на порядок затраты на техническую эксплуатацию необитаемых геликоптеров в сравнении с использованием для выполнения аналогичных задач ситуационной осведомленности управляемых пилотами машин Ми-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2023 |
|
RU2823932C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТОВ ВОДНОГО ТРАНСПОРТА ОТ ТЕРРОРИСТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526326C2 |
| Способ противодействия выполнению задач беспилотному летательному аппарату | 2018 |
|
RU2679377C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| СПОСОБ ЗАЩИТЫ ОТ ТЕРРОРИСТОВ НА ВОДНЫХ БАССЕЙНАХ | 2014 |
|
RU2551604C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| БЕРЕГОВОЙ КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ МНОГОРАЗОВЫЙ АВТОНОМНЫЙ | 2021 |
|
RU2768999C1 |
Изобретение относится к области обнаружения в атмосфере объектов, преимущественно малозаметных, и их координатометрии. Согласно способу дальнего оптического обнаружения по признакам конденсационного следа в атмосфере обеспечивают оптимальные условия обзора с размещением приемных постов угломерной системы координатометрии на бортах барражирующих выше облаков беспилотных вертолетов. При этом скорость перемещения фронта, альбедо и форма искусственного облака представляют его как конденсационный след, а по измеренным углам фронта конденсационного следа угломерным методом определяются местоположение и параметры движения объекта. Техническими результатами являются реализация дальнего пассивного местоопределения и расчета параметров движения объектов с минимальными ошибками, расширение зоны наблюдения. 2 н.п. ф-лы, 4 ил.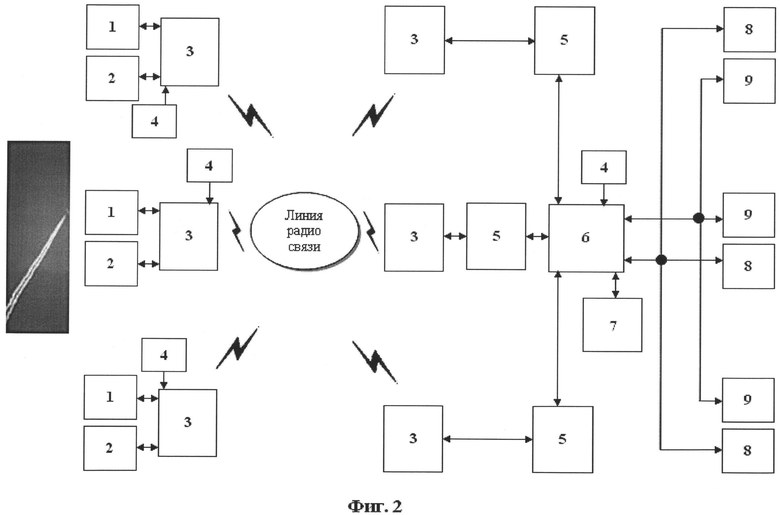
1. Способ дальнего оптического обнаружения летящего в стратосфере или в тропопаузе, либо на большой высоте со сверхзвуковой скоростью объекта, преимущественно малозаметного, и определения его местоположения по критериям конденсационного следа его силовой установки в атмосфере, включающий регистрацию фотонных потоков фотоприемниками телекамер спектральных каналов радиометров, отличающийся тем, что с целью достижения максимальной видимости в качестве объекта наблюдения выбирают эмитируемое авиадвигателем самолета контрастное на фоне безоблачного неба и протяженное искусственное "дорожное" перисто-кучевое облако, определив альбедо, форму и скорость перемещения фронта которого, классифицируют его как конденсационный след силовой установки летательного аппарата; прием отраженных от объекта потоков фотонов ведут на три или более разнесенных на фиксированное расстояние в пространстве поисково-прицельных сенсора с прецизионными цифровыми телекамерами на базе укомплектованных высокочувствительными крупноформатными ПЗС-матрицами фотоприемников видимого и ближнего инфракрасного диапазонов оптических волн в светлое и темное время суток соответственно; с целью исключения метеопомех и использования наибольшей прозрачности среды на пути прохождения солнечной радиации приемные посты угломерной системы координатометрии с поисково-прицельными сенсорами размещают на бортах барражирующих выше природных облаков беспилотных вертолетов, при этом фиксируют угловые координаты переднего среза конденсационного следа и определяют пеленгационным методом местоположение цели на плоскости; погрешность расчета плоскостных координат объекта задают точностью измерения углов фронта конденсационного следа, которую устанавливают топологией дискретности кристаллов ПЗС-матриц фотоприемников и короткофокусным или длиннофокусным режимами функционирования телекамер; скорость объекта принимают равной скорости перемещения переднего среза его конденсационного следа, высоту полета цели вычисляют как функцию дальности и угла места фронта ее конденсационного следа; рубеж разведки дополнительно увеличивают посредством выноса зоны патрулирования беспилотных вертолетов от наземного мобильного опорного пункта обработки информации и управления сенсорами и носителями на ограничиваемое радиусом действия аппаратуры связи расстояние.
2. Система для осуществления способа по п. 1, включающая соединенные радиолиниями обмена цифровой информацией разведданных, донесений и команд наземный мобильный опорный пункт обработки информации и управления сенсорами и носителями и три или более поста приема солнечной радиации, отличающаяся тем, что гиростабилизированные радиометры с ближними инфракрасными и видимыми спектральными каналами на основе прецизионных поисково-прицельных цифровых телекамер с регулируемыми временами экспозиции фотоприемников на базе высокочувствительных крупноформатных ПЗС-матриц устанавливаются на бортах беспилотных вертолетов; при этом беспилотные вертолеты занимают позиции по вершинам прямоугольного равнобедренного треугольника с ориентируемой перпендикулярно направлению на объект разведки гипотенузой, что в совокупности с высокой точностью измерения азимутов ПЗС-матрицами фотоприемников позволяет на наземном мобильном опорном пункте обработки информации и управления сенсорами и носителями определять угломерным методом местоположение цели на плоскости с минимальными ошибками, задаваемыми короткофокусным или длиннофокусным режимами функционирования телекамер.
| СПОСОБ СЕЛЕКЦИИ ОБЪЕКТОВ НА УДАЛЕННОМ ФОНЕ | 2007 |
|
RU2363018C1 |
| СИСТЕМА АВИАЦИОННОГО ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ЗАГРЯЗНЕНИЯ АТМОСФЕРЫ В КРЕЙСЕРСКОМ ПОЛЕТЕ | 2005 |
|
RU2304293C1 |
| JP 2009300063 A, 24.12.2009 | |||

