Предлагаемое изобретение относится к измерительной и испытательной технике и предназначено для использования при исследованиях различных пар трения, например, подшипников качения, скольжения и подшипниковых узлов в приборостроении, машиностроении и электромашиностроении.
Известен способ идентификации характеристики трения, при котором нагружают один из элементов пары, например, кольцо подшипника, радиальной силой, а другой элемент, например, другое кольцо подшипника, вращают с постоянной скоростью с помощью привода, и регистрируют момент трения по показаниям электромагнитного тормоза (А. с. №1293576 (СССР). Прибор для определения статического и кинетического трения подшипника / Е.Б. Гозман, Н.Е. Жуков, В.Г. Стрельников. - Опубл. 28.02.87. Бюл. №8, МПК G01N 19/02).
Известен способ идентификации диссипативных характеристик пар трения, при котором нагружают один из элементов пары радиальной силой, а другой элемент вращают с постоянной рабочей частотой, изменяют направление действия радиальной силы в направлении вращения вначале с частотой, равной частоте вращения элемента пары, а затем с частотой, равной нулю, при каждой частоте измеряют среднеквадратическое значение переменной составляющей и среднее значение нормированного интегрального времени электрического контактирования в паре трения, и оценивают диссипативную характеристику по значениям квадрата отношения среднеквадратического значения переменной составляющей к среднему значению указанного параметра при каждой частоте изменения направления действия радиальной нагрузки (Патент РФ №2168712, МПК G01M 13/00, 13/04. Способ контроля качества подшипников качения / К.В. Подмастерьев. - Опубл. 10.06.2001).
Известен способ идентификации характеристики трения, при котором один из элементов пары нагружают постоянной радиальной силой, а другое приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного двигателя с активным ротором и двумя обмотками на статоре, одна из которых подключена к источнику постоянного тока, а вторая - к источнику переменного тока, и измеряют переменный ток во второй обмотке и угловую скорость колебаний ротора и вычисляют эквивалентный диссипативный коэффициент как произведение конструктивного коэффициента синхронного двигателя на отношение среднего за период колебаний значения произведения тока на скорость к среднему за период колебаний квадрату угловой скорости (Патент РФ №2284019, МПК G01M 3/04, G01N 19/02. Способ идентификации диссипативных характеристик подшипников / С.И. Малафеев, А.И. Копейкин, В.Н. Шамберов. - Опубл. 20.09.2006. Бюл. №26).
При реализации известных способов оцениваются диссипативные характеристики пар трения: момент силы трения или коэффициент трения, при вращении одного из элементов пары с постоянной скоростью. Однако известно, что сила трения при наличии смазки зависит от скорости перемещения, температуры окружающей среды, состояния поверхностей, продолжительности работы, а также других факторов, и имеет случайный характер (Сосновский Л.А., Махутов Н.А., Шуринов В.А. Фрикционно-механическая усталость: Основные закономерности // Заводская лаборатория, 1992, №9. - С. 46-63). Поэтому измерение диссипативных характеристик при одной скорости движения не позволяет получить достоверную информацию о характеристике трения при изменяющихся угловых скоростях, соответствующих реальным условиям работы. Следовательно, известные способы имеют ограниченные функциональные возможности.
Из известных наиболее близким по технической сущности к предлагаемому техническому решению является способ идентификации характеристики трения, при котором один из элементов пары трения нагружают постоянной радиальной силой, а другой элемент приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного двигателя с активным ротором и двумя обмотками на статоре, одна из которых подключена к источнику переменного напряжения, а вторая - к источнику постоянного тока, измеряют переменный ток i в первой обмотке, угол поворота ϕ и угловую скорость Ω колебаний ротора, и вычисляют эквивалентный диссипативный коэффициент как произведение конструктивного коэффициента синхронного двигателя на отношение среднего за период колебаний значения произведения тока, угловой скорости и косинуса угла поворота к среднему за период колебаний квадрату угловой скорости (Патент №2360231, МПК G01M 3/04, G01N 19/02. Способ идентификации диссипативных характеристик пар трения / С.И. Малафеев, А.А. Малафеева, А.И. Копейкин. - Опубл. 27.06.09. Бюл. №18).
Известный способ позволяет определить эквивалентный диссипативный коэффициент пары трения в условиях колебаний во всем диапазоне изменения угловой скорости движения. Однако известный способ не позволяет получить достоверную информацию о характеристике силы трения в зависимости от угловой скорости. Таким образом, известный способ имеет ограниченные функциональные возможности.
Следовательно, недостаток известного способа идентификации характеристики трения - ограниченные функциональные возможности.
Цель предполагаемого изобретения - расширение функциональных возможностей идентификации характеристики трения путем за счет определения зависимости силы трения от угловой скорости.
Поставленная цель достигается тем, что в известном способе идентификации характеристики трения, при котором один из элементов пары трения нагружают постоянной радиальной силой, а другой элемент приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного двигателя с активным ротором и двумя обмотками на статоре, одна из которых подключена к источнику переменного напряжения, а вторая - к источнику постоянного тока, измеряют переменный ток i во второй обмотке, угол поворота ϕ и угловую скорость Ω колебаний ротора, дополнительно вычисляют синус sinϕ и косинус cosϕ угла поворота ротора и производную угловой скорости ротора  вычисляют момент силы сопротивления движению по формуле
вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, и регистрируют зависимость М=M(Ω) в течение периода установившихся колебаний.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, и регистрируют зависимость М=M(Ω) в течение периода установившихся колебаний.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое техническое решение имеет следующие новые операции:
- вычисляют синус sinϕ и косинус cosϕ угла поворота ротора и производную угловой скорости ротора 
- вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины;
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины;
- регистрируют зависимость М=M(Ω) в течение периода установившихся колебаний.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
При реализации предполагаемого изобретения расширяются функциональные возможности идентификации характеристики трения за счет определения зависимости момента силы трения от угловой скорости.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
По каждому отличительному признаку проведен поиск известных технических решений в области электротехники, автоматики и электропривода.
Операции: вычисляют синус sinϕ и косинус cosϕ угла поворота ротора и производную угловой скорости ротора  вычисляют момент силы сопротивления движению по формуле
вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины; регистрируют зависимость М=M(Ω) в течение периода установившихся колебаний, в способах и устройствах аналогичного назначения не обнаружены.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины; регистрируют зависимость М=M(Ω) в течение периода установившихся колебаний, в способах и устройствах аналогичного назначения не обнаружены.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
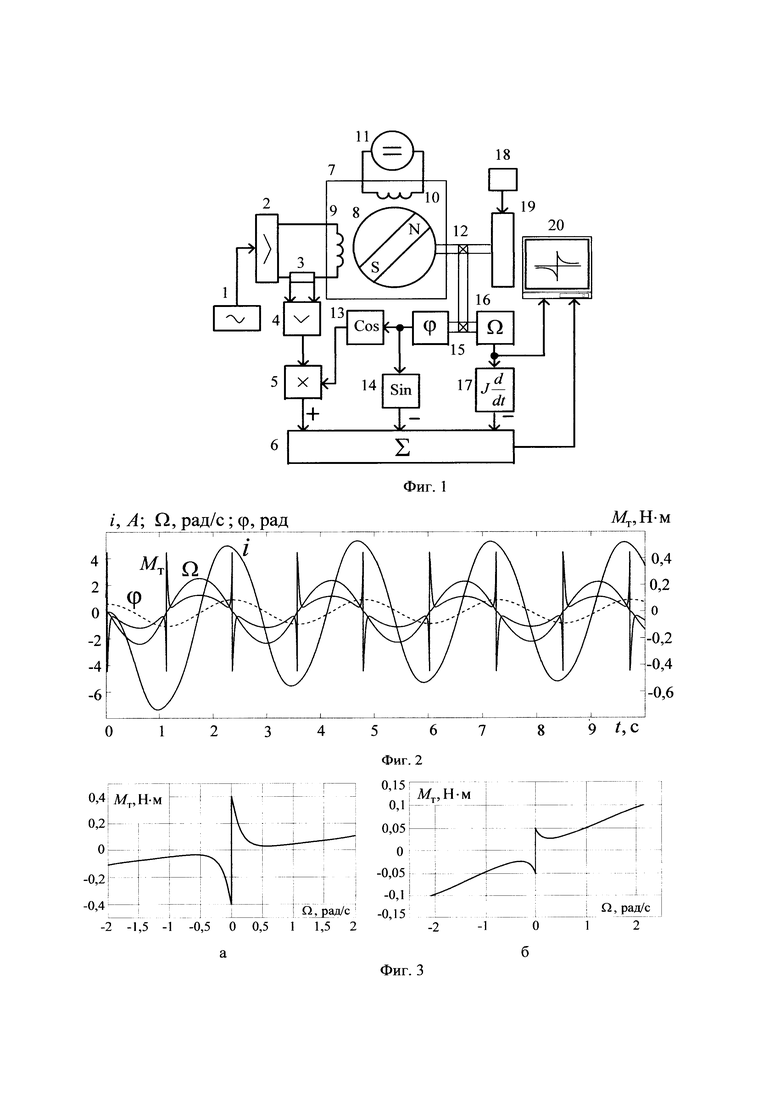
Сущность предлагаемого способа поясняется чертежом, на котором обозначено: 1 - регулируемый источник переменного напряжения; 2 - усилитель переменного напряжения; 3 - датчик тока (измерительный шунт); 4 - усилитель сигнала шунта; 5 - блок перемножения; 6 - алгебраический сумматор; 7 - синхронный двигатель, содержащий активный ротор с постоянными магнитами 8, первую 9 и вторую 10 обмотки на статоре; 11 - источник постоянного тока; 12 - механическая муфта; 13 - блок вычисления косинуса угла поворота cosϕ; 14 - блок вычисления синуса угла поворота sinϕ; 15 - датчик угла поворота; 16 - датчик угловой скорости; 17 - блок дифференцирования; 18 - устройство нагружения пары трения радиальной силой; 19 - испытуемая пара трения, например, подшипник; 20 - регистратор зависимости момента силы трения от угловой скорости. Испытуемая пара трения 20 соединена с валом синхронного двигателя с помощью муфты 12. Датчики угла поворота 15 и угловой скорости 16 соединены механически с валом синхронного двигателя.
В соответствии с предлагаемым способом идентификации характеристики трения один из элементов пары трения 19, например, кольцо подшипника, нагружают постоянной радиальной силой с помощью нагружающего устройства 18, а другой элемент приводят в колебательное движение с заданной постоянной частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного электродвигателя 7 с активным ротором 8 и двумя обмотками 9 и 10 на статоре, одна из которых (9) подключена к выходу регулируемого источника переменного напряжения 1 через усилитель напряжения 2, а вторая (10) - к источнику постоянного тока 11, измеряют переменный ток i в первой обмотке 9 с помощью датчика тока (шунта) 3 и измерительного усилителя сигнала шунта 4, измеряют угловую скорость Ω колебаний ротора с помощью датчика угловой скорости 16, измеряют угол ϕ поворота ротора с помощью датчика угла поворота 15, вычисляют синус sinϕ и косинус cosϕ угла поворота ротора с помощью соответственно блоков вычисления синуса sinϕ 14 и косинуса cosϕ 13, вычисляют производную угловой скорости ротора  с помощью блока дифференцирования 17, вычисляют момент силы сопротивления движению по формуле
с помощью блока дифференцирования 17, вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, с помощью блока перемножения 5 и алгебраического сумматора 6, и регистрируют зависимость М=М(Ω) с помощью регистратора 20, например, графического дисплея или монитора, в течение периода установившихся колебаний.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, с помощью блока перемножения 5 и алгебраического сумматора 6, и регистрируют зависимость М=М(Ω) с помощью регистратора 20, например, графического дисплея или монитора, в течение периода установившихся колебаний.
С целью объяснения предлагаемого способа рассмотрим процесс колебательного движения системы при вынуждающей силе М и нелинейно-вязком трении. Математическое описание колебательной системы в форме дифференциальных уравнений, составленное на основе уравнений Лагранжа - Максвелла, имеет вид (Копейкин А.И., Малафеев С.И. Управляемые электромеханические колебательные системы. - Владимир, Посад, 2001. - 128 с.):
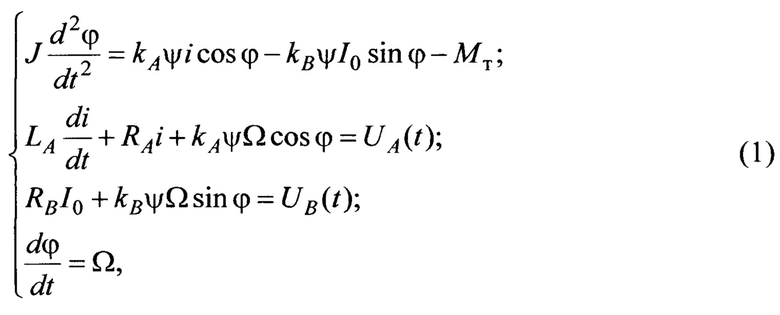
где J - момент инерции вращающихся элементов системы;
ϕ - угол поворота ротора синхронного двигателя 7;
Ω - угловая скорость ротора синхронного двигателя 7;
ψ - потокосцепление синхронного двигателя 7;
Мт - момент силы, обусловленной трением;
М - момент вынуждающей силы (электромагнитный момент синхронного двигателя 7);
kВ и kВ - конструктивные коэффициенты синхронного двигателя 7;
RA и LA - активное сопротивление и индуктивность первой обмотки 9 синхронного двигателя 7;
RB и LB - активное сопротивление и индуктивность второй обмотки 10 статора синхронного двигателя 7;
UA(t) и UB(t) напряжения на первой 9 и второй 10 обмотках статора синхронного двигателя 7;
i - переменный ток в первой обмотке 9 синхронного двигателя 7;
I0 - постоянный ток во второй обмотке 10 синхронного двигателя.
В режиме колебаний сила сопротивления движению в соответствии с первым уравнением системы (1) равна

Слагаемое  в уравнении (2) представляет собой возвращающий момент
в уравнении (2) представляет собой возвращающий момент  электрической пружины, где
электрической пружины, где  Слагаемое
Слагаемое  есть электромагнитный момент синхронного двигателя, где
есть электромагнитный момент синхронного двигателя, где  - конструктивная постоянная синхронного двигателя. Слагаемое
- конструктивная постоянная синхронного двигателя. Слагаемое  есть противо-ЭДС синхронного двигателя. Идентификация момента силы трения выполняется по оценкам электромагнитного момента М, момента электрической пружины Мп и динамического момента Мд в соответствии с уравнением
есть противо-ЭДС синхронного двигателя. Идентификация момента силы трения выполняется по оценкам электромагнитного момента М, момента электрической пружины Мп и динамического момента Мд в соответствии с уравнением

Для определения оценки момента силы трения Мт в соответствии с уравнением (3) выполняются измерения угловой скорости Ω и угла поворота ϕ. Уравнение для оценки момента силы трения в зависимости от угловой скорости имеет вид

Момент инерции J, коэффициенты kА и kВ, потокосцепление ψ и ток I0 определяются расчетным путем или экспериментально. Результат идентификации - это зависимость Mт(Ω) для диапазона угловых скоростей колебательной системы. Зависимость сохраняется в памяти контроллера и выводится на монитор.
Таким образом, для определения зависимости момента силы трения от угловой скорости используются результаты измерений трех переменных - тока, скорости и угла поворота ротора в режиме колебаний, вычислительная процедура осуществляется по формуле (4) с последующим автоматическим построением графика с помощью регистратора. Момент силы трения зависит от множества факторов и изменяется в процессе испытаний. При проведении длительного эксперимента наблюдается эволюция характеристики трения при работе системы. Данные экспериментов позволяют составить аналитическое описание модели трения и определить статистические характеристики коэффициентов модели.
С целью подтверждения положительного эффекта при реализации предлагаемого способа было выполнено моделирование системы идентификации трения, показанной на фиг. 1, с использованием Simulink. Эксперименты проводились для случая нелинейной модели трения Штрибека. Зависимость момента силы трения от угловой скорости аппроксимируется формулой

где β - коэффициент, характеризующий полужидкостное трение; χ - коэффициент вязкого трения; Mт0 - момент силы трения покоя.
Параметры системы: rА=rВ=1 Ом; LА=LВ=0,05 Гн; J=0,1 кг⋅м2; I0=2,6 А;  Коэффициенты передачи датчиков угловой скорости 16 kΩ=1 В⋅с/рад; угла поворота 15 kϕ=0,1 В/рад; тока 3 ki=0,1. Коэффициент передачи усилителя 2 ky=2.
Коэффициенты передачи датчиков угловой скорости 16 kΩ=1 В⋅с/рад; угла поворота 15 kϕ=0,1 В/рад; тока 3 ki=0,1. Коэффициент передачи усилителя 2 ky=2.
На рис. 2 показаны осциллограммы процессов для тока i, угловой скорости Ω, угла поворота ϕ и момента силы трения Mт при колебаниях в системе. На рис. 3 приведены зависимости момента силы трения от угловой скорости  при различных характеристиках трения, полученные в результате экспериментов.
при различных характеристиках трения, полученные в результате экспериментов.
Таким образом, использование в известном способе идентификации характеристики трения, при котором один из элементов пары трения нагружают постоянной радиальной силой, а другой элемент приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного электродвигателя с активным ротором и двумя обмотками на статоре, одна из которых подключена к источнику переменного напряжения, а вторая - к источнику постоянного тока, измеряют переменный ток i в первой обмотке, угол поворота ϕ и угловую скорость Ω колебаний ротора, дополнительно вычисления синуса sinϕ и косинуса cosϕ угла поворота ротора и производной угловой скорости ротора  вычисления момента силы сопротивления движению по формуле
вычисления момента силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, и регистрация зависимости М=M(Ω) в течение периода установившихся колебаний, позволяет расширить функциональные возможности за счет определения зависимости момента силы трения от угловой скорости.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, и регистрация зависимости М=M(Ω) в течение периода установившихся колебаний, позволяет расширить функциональные возможности за счет определения зависимости момента силы трения от угловой скорости.
Использование предлагаемого способа в приемочных и научно-исследовательских испытаниях пар трения, например, подшипников, позволит повысить точность и эффективность идентификации диссипативных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2008 |
|
RU2360231C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПОДШИПНИКОВ | 2005 |
|
RU2284019C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2009 |
|
RU2408870C1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| СПОСОБ ОЦЕНИВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДШИПНИКОВ | 2009 |
|
RU2407999C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОЛЕБАНИЙ СИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2076439C1 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ КОЛЕБАНИЙ | 1991 |
|
RU2025890C1 |
| ГЕНЕРАТОР МЕХАНИЧЕСКИХ АВТОКОЛЕБАНИЙ | 2022 |
|
RU2793608C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА | 2000 |
|
RU2172936C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИЛЫ ТРЕНИЯ ПРИ ПРОКАТКЕ МЕТАЛЛОВ | 2013 |
|
RU2527324C1 |
Изобретение относится к измерительной технике и предназначено для испытаний пар трения. Сущность: один из элементов пары трения 19 нагружают постоянной радиальной силой, а другой приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного двигателя 7 с активным ротором 8 и двумя обмотками 9 и 10 на статоре, одна из которых (9) подключена к выходу регулируемого источника переменного напряжения 1 через усилитель напряжения 2, а вторая (10) - к источнику постоянного тока 11, измеряют переменный ток i в первой обмотке 9 с помощью датчика тока 3, измеряют угловую скорость Ω колебаний ротора с помощью датчика угловой скорости 16, измеряют угол ϕ поворота ротора с помощью датчика угла поворота 15, вычисляют синус sinϕ и косинус cosϕ угла поворота ротора с помощью соответственно блоков вычисления синуса 14 и косинуса 13, вычисляют производную угловой скорости ротора  с помощью блока дифференцирования 17, вычисляют момент силы сопротивления движению по формуле
с помощью блока дифференцирования 17, вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, t – время, с помощью блока перемножения 5 и алгебраического сумматора 6 и регистрируют зависимость М=M(Ω) с помощью регистратора 20 в течение периода установившихся колебаний. Технический результат: расширение функциональных возможностей идентификации характеристики трения. 3 ил.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины, t – время, с помощью блока перемножения 5 и алгебраического сумматора 6 и регистрируют зависимость М=M(Ω) с помощью регистратора 20 в течение периода установившихся колебаний. Технический результат: расширение функциональных возможностей идентификации характеристики трения. 3 ил.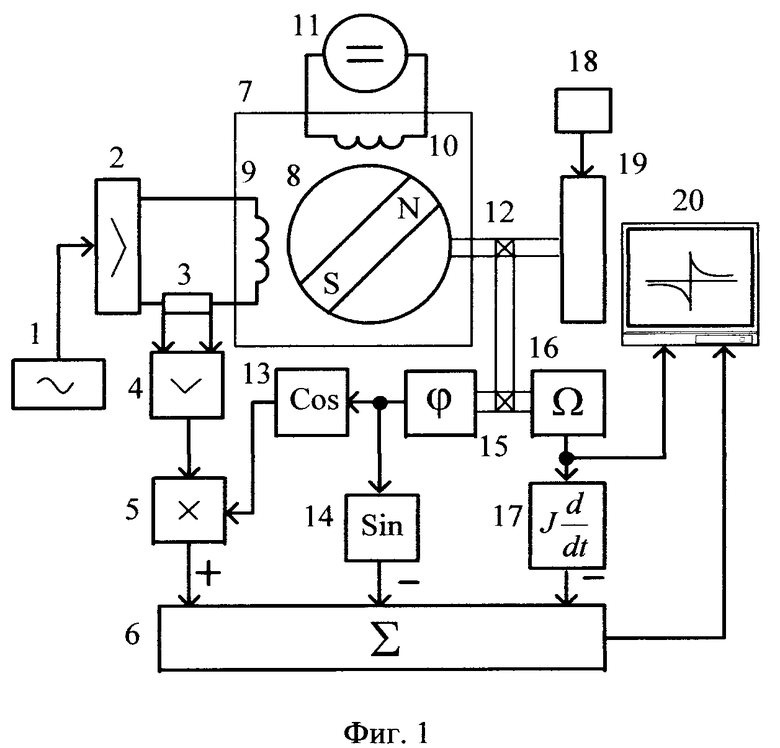
Способ идентификации характеристики трения, при котором один из элементов пары трения нагружают постоянной радиальной силой, а другой элемент приводят в колебательное движение с заданными частотой и амплитудой с помощью электромеханической системы, выполненной на основе синхронного двигателя с активным ротором и двумя обмотками на статоре, одна из которых подключена к источнику переменного напряжения, а вторая - к источнику постоянного тока, измеряют переменный ток i в первой обмотке, угол поворота ϕ и угловую скорость Ω колебаний ротора, отличающийся тем, что дополнительно вычисляют синус sinϕ и косинус cosϕ угла поворота ротора и производную угловой скорости ротора  вычисляют момент силы сопротивления движению по формуле
вычисляют момент силы сопротивления движению по формуле  где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины; t - время, и регистрируют зависимость в течение периода установившихся колебаний.
где kм - конструктивная постоянная синхронного двигателя; J - момент инерции колеблющихся масс; kп - жесткость электрической пружины; t - время, и регистрируют зависимость в течение периода установившихся колебаний.
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2008 |
|
RU2360231C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПОДШИПНИКОВ | 2005 |
|
RU2284019C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИССИПАТИВНЫХ ХАРАКТЕРИСТИК ПАР ТРЕНИЯ | 2009 |
|
RU2408870C1 |
| CN 105444950 A, 30.03.2016. | |||

