Изобретение относится к области космической техники, в частности к проектированию трансформируемых конструкций космических аппаратов.
Известен способ для раскрытия трансформируемого рефлектора зонтичного типа (патент № RU 191053 U1). После вывода целевого спутника на орбиту, рефлектор освобождается от закрепления в транспортировочном положении. Гибкие шарниры приводятся в действие, за счет упругой силы. Шарнирно закрепленные на основании рефлектора спицы переводятся в рабочее положение, благодаря запасенной энергии деформации обода. Закрепленное на спицах зонтичного рефлектора радиоотражающее сете полотно переводится из транспортного положение в рабочее.
Недостатком такого подхода является то, что спицы являются жесткой цельной конструкцией. Вследствие чего возникает ограниченность размера такого рефлектора как в транспортировочном, так и в рабочем положениях. На этапе раскрытия длина спицы остается неизменной и отсутствует возможность увеличения диаметра рефлектора в рабочем положении. Необходим расчет жесткости упругого элемента или дополнительный расчет механизма упора.
Известен патент №US 2016/0352022 А1, в котором в некоторых вариантах при раскрытии каждая спица разделена на два компонента: корневое и конечное, которые соединены между собой шарниром. Рассматривается вариант развертывания концевого звена через кабельный механизм, в котором отсутствует жесткость на кручение. Кроме того, поскольку было определено, что кабелями будет трудно управлять и обеспечивать требуемое смещение, конструкция была упрощена путем замены кабелей одной пружиной. Конструкция с использованием пружины с постоянным усилием была настроена и принята за окончательную концепцию.
Основным недостатком такого подхода является отсутствие возможности управлять раскрытием концевого звена в режиме реального времени в зависимости от состояния системы. Необходимо заранее рассчитывать степень сжатия пружины таким образом, чтобы усилия хватало на надежное развертывание и при этом не вызывать чрезмерного колебания системы. При таком варианте перевода системы из сложенного в рабочее состояние увеличивается возможность возникновения критических поперечных колебаний, что приведет к длительному времени переходного процесса или к выходу системы из строя.
Наиболее близким по технической сущности к заявляемому изобретению является способ раскрытия космической конструкции, указанный в патенте № RU 2232111 С2, принятый в качестве ближайшего аналога. Описанный в данном патенте способ заключается в использовании центробежной силы для развертывания мембраны лепестков космического аппарата, которые прикреплены к вращаемому корпусу с помощью множества креплений. Устройство управления отклоняет крепления под желаемым углом, затем происходит вращение корпуса. Под действием центробежной силы каждый из лепестков начинает раскрываться, образуя тем самым требуемую поверхность.
Основным недостатком подхода, описанного в патенте № RU 2232111 С2, является фиксированная длина лепестков как в сложенном, так и в раскрытом состоянии. Ввиду развертывания мембраны, закрепленной на лепестках, под заданным углом, при раскрытии используется определенная составляющая центробежной силы. Общая поверхность мембраны получается не цельной, а состоящей из отдельных мембран, соответствующих своим лепесткам. Раскрытие крепления под желаемым углом происходит по заранее выбранной программе управления, вследствие чего отсутствует возможность автоматически менять управление в зависимости от состояния системы.
Задачей заявляемого изобретения является обеспечение высоконадежного раскрытия спицы космического аппарата с уменьшением транспортировочного объема аппарата при сохранении размеров в рабочем состоянии без увеличения массы конструкции и при минимизации колебаний.
Техническая сущность и принцип действия предложенного способа поясняются чертежами, на которых показаны:
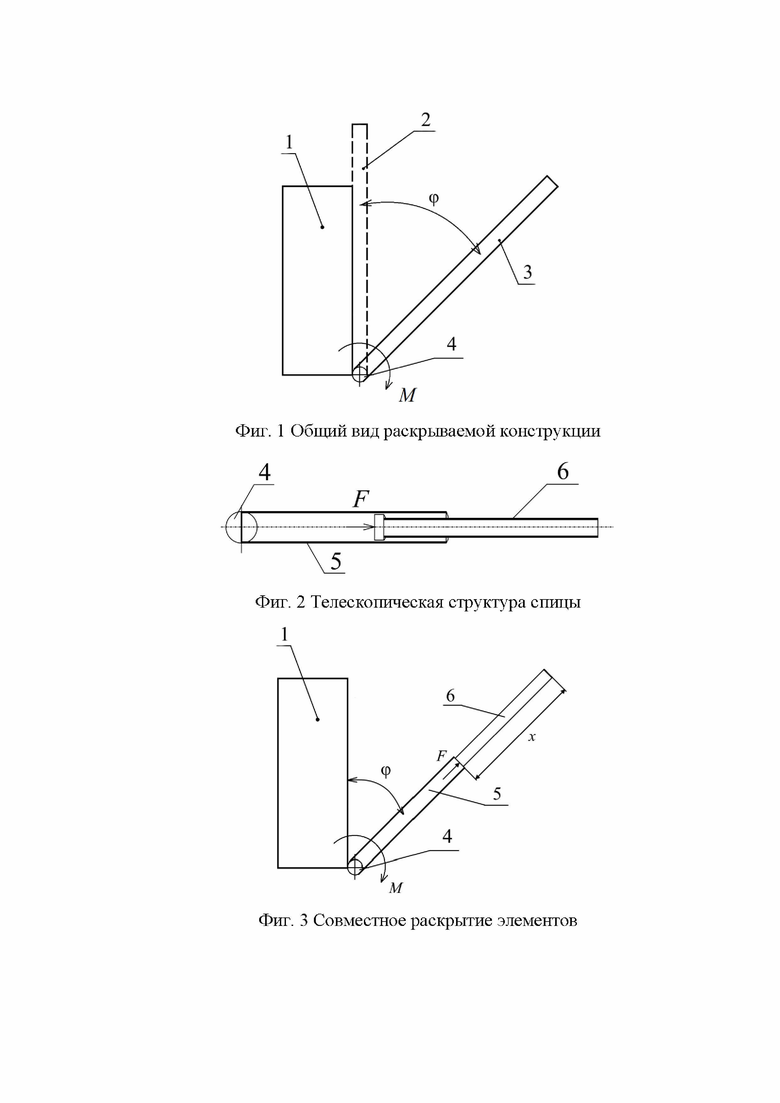
на фиг.1 - Общий вид раскрываемой конструкции;
на фиг.2 - Телескопическая структура спицы;
на фиг.3 - Совместное раскрытие элементов.
На вышеуказанных фигурах изображен способ раскрытия спицы космического аппарата с использованием следующих элементов: 1 - космический аппарат; 2 - начальное положение спицы; 3 - спица; 4 - шарнирное соединение; 5 - корневое звено спицы; 6 - концевое звено спицы.
Решение поставленной задачи достигается тем, что с помощью управляемого через вычислитель электрического двигателя осуществляется развертывание спицы 3, шарнирно закрепленной за корпус космического аппарата 1. Предварительно перед непосредственным раскрытием с помощью лазерного сканера оценивается состояние спицы 3, а именно угол поворота спицы  изгиб на ее конце
изгиб на ее конце  где
где  - функция только времени t;
- функция только времени t;  - функция только координаты
- функция только координаты  линейное положение концевого звена спицы
линейное положение концевого звена спицы  , представляющее собой обратную связь системы управления. Измеренные и заданные начальные и заданные конечные значения вектора состояния системы
, представляющее собой обратную связь системы управления. Измеренные и заданные начальные и заданные конечные значения вектора состояния системы  где
где  - угловая скорость поворота спицы, а1 и V1a - изгиб и скорость изгиба спицы 6 соответственно, V - линейная скорость выдвижения спицы 5; q - координата сжатия спицы 5 как функция времени, Vq - линейная скорость сжатия спицы 5, передаются на вычислитель.
- угловая скорость поворота спицы, а1 и V1a - изгиб и скорость изгиба спицы 6 соответственно, V - линейная скорость выдвижения спицы 5; q - координата сжатия спицы 5 как функция времени, Vq - линейная скорость сжатия спицы 5, передаются на вычислитель.
Раскрытие телескопической спицы 3 рефлектора, выполненной из легкого и прочного материала (например, композитного углепластика), состоящей из двух телескопически вложенных друг в друга частей: корневого звена спицы 5 и концевого звена спицы 6, осуществляется непрерывно при наличии постоянной обратной связи одним электрическим двигателем. Механизм раскрытия представлен электрическим двигателем, создающим необходимый момент для развертывания. Применение двигателя для раскрытия корневого звена спицы 6 и возникающей при этом центробежной силы для выдвижения концевого звена спицы 5 позволяет уменьшить время выведения космического аппарата 1 из транспортировочного в рабочее положение и объем, занимаемый спицей 3 в транспортировочном положении.
Кроме того, предложенный способ отличается отсутствием исполнительного устройства на выдвижение концевого звена спицы 6. Управляемый двигатель позволяет в режиме реального времени в зависимости от состояния системы X управлять процессом развертывания и обеспечивать выполнения терминальных условий как для корневого звена спицы 6, так и для концевого звена спицы 5 за счет применения алгоритма оптимизации с коррекцией параметров структуры управления [1]. При этом управление вычисляется в реальном времени в процессе движения как функция текущих значений фазовых координат. В этом случае из применения принципа максимума определяется структура управления, параметры которой оптимизируются во вспомогательной задаче. Оптимизацию параметров удобно производить по критерию Красовского [1], известного так же как функционал обобщенной работы или ФОР, с использованием алгоритма с прогнозирующей моделью.
После выведения космического аппарата 1 (фиг.1) на орбиту начинается разворот спицы 3 из начального положения спицы 2 в заданное на угол ϕ, путем поворота спицы 3, шарнирно соединенного 4 к корпусу космического аппарата 1 под действием момента М, создаваемого двигателем. При этом возникает центробежная сила F (фиг.2), которая выталкивает концевое звено спицы 6, телескопически вложенного в корневое звено спицы 5, из корневого звена спицы 5 на длину  (фиг.3).
(фиг.3).
Для одновременного достижения конечных значений по углу раскрытия  и длине выдвижения
и длине выдвижения  и минимизации колебаний спицы 3 используется алгоритм с коррекцией параметров структуры управления [2]. При этом формируется вспомогательная задача, решение которой приводит к решению основной задачи. Управление вычисляться в режиме реального времени.
и минимизации колебаний спицы 3 используется алгоритм с коррекцией параметров структуры управления [2]. При этом формируется вспомогательная задача, решение которой приводит к решению основной задачи. Управление вычисляться в режиме реального времени.
Для решения задачи оптимизации (минимизация колебаний спицы 3) и точного выполнения терминальных условий необходимо использовать систему дифференциальных уравнений первого порядка как для вращательного [3]:
так и для поступательного видов движений [4]:
где  - момент инерции спицы 3;
- момент инерции спицы 3;  - модуль упругости;
- модуль упругости;  - изгибной момент инерции;
- изгибной момент инерции;  - плотность материала спицы 3;
- плотность материала спицы 3;  - площадь спицы 3 в поперечном сечении;
- площадь спицы 3 в поперечном сечении;  - координата длины спицы 3,
- координата длины спицы 3,  - коэффициент затухания;
- коэффициент затухания;  - общий момент, действующий на спицу 3:
- общий момент, действующий на спицу 3:  Мп - полезный момент, создаваемый электрическим двигателем; U - напряжение питания электрического двигателя; Мтр - момент трения; Мупор - момент, создаваемый упором; Мф - момент, создаваемый фиксатором;
Мп - полезный момент, создаваемый электрическим двигателем; U - напряжение питания электрического двигателя; Мтр - момент трения; Мупор - момент, создаваемый упором; Мф - момент, создаваемый фиксатором;  - изгиб спицы 3; a1(t) - функция только времени t;
- изгиб спицы 3; a1(t) - функция только времени t;  - функция только координаты
- функция только координаты  q1=Z1/L, где Z1=1.875, L - полная длина спицы 3; Rd - радиус вала двигателя;
q1=Z1/L, где Z1=1.875, L - полная длина спицы 3; Rd - радиус вала двигателя;  - длина выдвижения концевого звена спицы 6; V - линейная скорость выдвижения концевого звена спицы 6; q - координата сжатия спицы как функция времени, V - линейная скорость сжатия концевого звена спицы 6;
- длина выдвижения концевого звена спицы 6; V - линейная скорость выдвижения концевого звена спицы 6; q - координата сжатия спицы как функция времени, V - линейная скорость сжатия концевого звена спицы 6;  - сжатие концевого звена спицы 6; q2(t) - функция только времени t;
- сжатие концевого звена спицы 6; q2(t) - функция только времени t;  - функция только координаты
- функция только координаты  m - масса выдвигаемого концевого звена спицы 6;
m - масса выдвигаемого концевого звена спицы 6;  - длина выдвигаемого концевого звена спицы 6; полезная сила
- длина выдвигаемого концевого звена спицы 6; полезная сила  полезный момент зависит от управления U
полезный момент зависит от управления U  , где mф - число фаз ротора; р - число пар полюсов магнитного поля, Е0 - действующее значение электродвижущей силы (ЭДС) на обмотке статора; ϑ - угол рассогласования (между U и Е0, для двигателя находится в пределах [0, π/2])); ωр - угловая скорость вращения ротора двигателя; Хс - синхронное сопротивление.
, где mф - число фаз ротора; р - число пар полюсов магнитного поля, Е0 - действующее значение электродвижущей силы (ЭДС) на обмотке статора; ϑ - угол рассогласования (между U и Е0, для двигателя находится в пределах [0, π/2])); ωр - угловая скорость вращения ротора двигателя; Хс - синхронное сопротивление.
Для достижения терминальных условий при минимизации колебаний спицы 3 происходит расчет управления с помощью алгоритма коррекции параметров структуры управления [3].
Рассчитанный сигнал управления поступает на двигатель, приводящий в движение корневое звено спицы 5 на фиг.3. Корневое звено спицы 5 начинает вращаться в одной плоскости, что приводит к возникновению центробежной силы F, которая выталкивает концевое звено спицы 6. При этом в режиме реального времени осуществляется измерение параметров вектора состояния X спицы 3, что позволяет корректировать управляющее воздействие. Добавление в критерий оптимизации колебания спицы 3 формирует управление минимизирующее возникающие колебания:

где 

 - коэффициенты.
- коэффициенты.
По окончанию раскрытия происходит зачековка всех элементов. Для достижения наибольшего эффекта применения алгоритма управления необходимо точно определить конструктивные параметры спицы 3, задать терминальные условия, весовые коэффициенты в критерии оптимизации (3) и время полного развертывания спицы 3.
Таким образом, проблема уменьшения объема в транспортировочном положении при сохранении размеров рабочего положения решается путем телескопической укладки концевого звена спицы 6 в корневое звено спицы 5 (фиг.3) и использования центробежной силы, возникающей при раскрытии корневого звена спицы 5, для полного раскрытия спицы 3. При этом использование в качестве исполнительного органа двигателя позволяет управлять процессом в режиме реального времени в зависимости от состояния спицы 3 X и, как следствие, заранее рассчитать угол раскрытия ϕ и длину выдвижения  выбирать управление таким образом, чтобы минимизировать колебания спицы 3. Выдвижение концевого звена спицы 6 за счет центробежной силы позволяет уменьшить массу всей спицы 3, так как отсутствует необходимость установки исполнительного устройства на выдвигающееся звено спицы 6.
выбирать управление таким образом, чтобы минимизировать колебания спицы 3. Выдвижение концевого звена спицы 6 за счет центробежной силы позволяет уменьшить массу всей спицы 3, так как отсутствует необходимость установки исполнительного устройства на выдвигающееся звено спицы 6.
Задача управления двигателем усложняется, поскольку возникает необходимость варьировать напряжение питания исполнительного устройства исходя из желаемых характеристик не только для углового движения, но и для поступательного.
Алгоритм построения управления состоит из последовательности следующих действий:
- Интегрирование в прямом времени системы дифференциальных уравнений (1) и (2), на заданном интервале времени, выбранным, исходя из оцененного времени раскрытия спицы.
- Вычисление граничных условий  где
где  - вектор заданных коэффициентов,
- вектор заданных коэффициентов,  - значение вектора X в конечный момент времени
- значение вектора X в конечный момент времени  при моделировании,
при моделировании,  - заданное конечное значение вектора X.
- заданное конечное значение вектора X.
- Интегрирование в обратном времени системы сопряженных уравнений  где Н - гамильтониан системы дифференциальных уравнений (1), (2) и вычисление управления.
где Н - гамильтониан системы дифференциальных уравнений (1), (2) и вычисление управления.
- Моделирование системы дифференциальных уравнений (1) и (2), описывающих динамику системы X, с найденным управлением на один шаг вперед, выбранным, исходя из мощности вычислителя; повторение алгоритма до достижения терминальных условий.
- Повторения алгоритма до достижения терминальных условий. Одним из важных достоинств алгоритма является возможность построения управления в режиме реального времени. Его можно использовать для вычисления опорного управления в алгоритмах, основанных на принципе двухканальности [1].
Применение данного способа совместного раскрытия спицы 3 космического аппарата 1 апробировано для круглой спицы 3 фиг.1 из материала АБС пластик QHF-0140: плотность материала ρ=1600 кг⋅м3, модуль упругости (Юнга) Е=1.2⋅1011 Па, длина корневого 5 и концевого 6 звеньев спицы а=5 м, коэффициент Пуассона υ=0.3, масса спицы 3 (всех вложенных звеньев) m=2А кг, сечение спицы 3 R=0.26 м, ограничение питания двигателя - 12 В, космический аппарат 1 считается неподвижным. Необходимо раскрыть корневое звено спицы 5 на угол π/2 рад при выдвижение концевого звена спицы 6 на 5 м. Время раскрытия  с, максимальная допустимая амплитуда прогиба
с, максимальная допустимая амплитуда прогиба  мм. Численное моделирование перевода системы из начального состояния в конечное с отсутствием перерегулирования по углу разворота ср за время
мм. Численное моделирование перевода системы из начального состояния в конечное с отсутствием перерегулирования по углу разворота ср за время  с проводилось методом Эйлера с шагом
с проводилось методом Эйлера с шагом  с. При выбранных параметрах удается решить поставленную задачу плавной постановки на упор всех звеньев спицы (5 и 6), минимизируя колебания спицы 3.
с. При выбранных параметрах удается решить поставленную задачу плавной постановки на упор всех звеньев спицы (5 и 6), минимизируя колебания спицы 3.
Достижение технического результата раскрытия спицы 3 является надежным без паразитных скоростей и колебаний спицы 3 и при использовании предложенного алгоритма оптимальной коррекции параметров структуры управления.
Источники информации
1. Кабанов С.А. Оптимизация динамики систем с коррекцией параметров структуры управления // Вест. С-Петерб. ун-та. Сер.1. Математика. Механика. Астрономия. Т.1. 2014. Вып.2. С.254-260 (https://math-mech-astr-joimial.spbu.ru/article/view/l 1050).
2. Свидетельство о государственной регистрации программы для ЭВМ 2021665771. Российская Федерация. Программа для моделирования управления поворотом спицы крупногабаритного трансформируемого рефлектора космического базирования / Митин Ф.В., Кабанов С.А.; заявитель и правообладатель Федеральное государственное бюджетное образовательное учреждение высшего образования Балтийский государственный технический университет «ВОЕНМЕХ» им. Д.Ф. Устинова (БГТУ «ВОЕНМЕХ») (RU) - No 2021665771; заявл. 12.07.2021; опубл. 01.10.2021.-1 с.
3. Кабанов С.А., Кабанов Д.С., Никулин Е.Н., Митин Ф.В. Оптимальное управление разведением спицы трансформируемого рефлектора при наличии возмущений // Сибирский аэрокосмический журнал. 2021. Т. 22, №4. С.649-659. DOI: 10.31772/2712-8970-2021-22-4-649-659.
4. Кабанов Д.С., Никулин Е.Н. Алгоритм последовательной оптимизации этапа выдвижения спиц крупногабаритного трансформируемого рефлектора //Приборостроение. 2021. Т. 64, №3. С.192-201. DOI: 10.17586/0021-3454-2021-64-3-192-201.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир рефлектора зонтичного типа, способ и система управления раскрытием рефлектора | 2023 |
|
RU2815260C1 |
| Шарнир трансформируемого рефлектора зонтичного типа | 2022 |
|
RU2805228C1 |
| Способ стабилизации лучей спутниковой гибридной зеркальной антенной по сигналам наземного радиомаяка | 2023 |
|
RU2826368C1 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ РЕФЛЕКТОР КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2382453C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КРУПНОГАБАРИТНОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ ЗОНТИЧНОГО ТИПА КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2380798C1 |
| ЗОНТИЧНАЯ АНТЕННА КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2370865C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КРУПНОГАБАРИТНОГО ТРАНСФОРМИРУЕМОГО РЕФЛЕКТОРА | 2016 |
|
RU2674386C2 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ РЕФЛЕКТОР КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2350519C1 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ РЕФЛЕКТОР КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2382452C1 |
| Устройство для имитации нагрузки приводов раскрытия трансформируемых конструкций космических аппаратов | 2023 |
|
RU2801954C1 |
Изобретение относится к проектированию и управлению раскрытием трансформируемых конструкций (ТРК) космических аппаратов (КА). Спица ТРК, например рефлектора, выполнена в виде телескопической трубы, состоящей из корневого звена, шарнирно закрепленного к корпусу КА, и вложенного в него концевого звена. За счет применения двигателя для вращательной составляющей и возникающей при этом центробежной силы для выдвижения концевого звена удается обеспечить надежное развертывание спицы при уменьшенном транспортировочном объеме. Выдвижение концевого звена спицы за счет центробежной силы позволяет уменьшить массу всей спицы, так как отсутствует необходимость установки исполнительного устройства на выдвигающееся звено. Применение алгоритма коррекции параметров структуры управления позволяет обеспечить точное выполнение терминальных условий при минимизации колебаний спицы. Техническим результатом является упрощение конструкции спицы при сохранении массы и размеров ТРК, а также уменьшение транспортного объема КА. 3 ил.
Способ раскрытия спицы трансформируемой конструкции космического аппарата, при котором с помощью управляемого через вычислитель электрического двигателя осуществляется развертывание спицы, шарнирно закрепленной за корпус космического аппарата, отличающийся тем, что предварительно перед непосредственным раскрытием с помощью лазерного сканера оценивается состояние спицы, а именно угол поворота спицы ϕ, изгиб на ее конце 





 – угловая скорость поворота спицы,
– угловая скорость поворота спицы,  и
и  – изгиб и скорость изгиба спицы соответственно,
– изгиб и скорость изгиба спицы соответственно, 


где I – момент инерции спицы; 





























| МЕМБРАННАЯ КОСМИЧЕСКАЯ КОНСТРУКЦИЯ И СПОСОБ ЕЕ РАЗВЕРТЫВАНИЯ И РАСКРЫТИЯ | 2002 |
|
RU2232111C2 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ РЕФЛЕКТОР КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2382452C1 |
| 0 |
|
SU191053A1 | |
| US 5446474 А, 29.08.1995. | |||

