Группа заявленных изобретений относится к устройству и способу управления работой BMS с помощью внешних сигналов, и, более конкретно, к устройству управления работой BMS и способу управления режимом управления BMS путем дополнительного использования внешних сигналов запуска ключа (сигнала) в дополнение к вспомогательному источнику питания.
Спрос на электромобили (EV) или системы накопления энергии (ESS), использующие вторичные батареи, растет из-за ужесточения экологических норм, возможности истощения запасов нефти и постоянных высоких цен на нефть.
Центральным элементом электромобиля и системы накопления энергии является аккумулятор (далее по тексту - батарея, батарейный блок или аккумулятор), а система управления ею называется системой управления аккумуляторной батареей (BMS).
BMS играет важную роль в управлении батареей, например, в определении необходимости замены батареи и заблаговременном обнаружении проблемы с батареей путем мониторинга напряжения, тока и температуры батарейного блока и поддержания батареи в оптимальном состоянии.
Однако при эксплуатации аккумуляторов для электромобилей и ESS, если BMS активируется только с помощью вспомогательного источника питания, невозможно проверить состояние готовности всей системы, и, таким образом, аккумулятор перегружается, что сказывается на производительности.
Например, в современном уровне технологии, когда вспомогательная мощность подается на аккумулятор электромобиля, используется способ, в котором приводится в действие BMS и принимается команда управления движением через CAN-связь для приведения в действие аккумулятора. Когда используется сигнал извне, также используется способ проверки запуска батареи путем распознавания сигнала через распределение вспомогательного напряжения на аналого-цифровой преобразователь (АЦП) главного контроллера BMS.
Однако, когда подается вспомогательное питание, как описано выше, BMS активируется, и батарея может быть приведена в действие командой от CAN-связи, но возможно возникновение сбоя BMS из-за ошибки связи. Например, транспортное средство не должно быть в режиме работы во время зарядки, но, если возникает ошибка связи, во время зарядки средство может быть приведено в действие, что может привести к дорожно-транспортному происшествию.
Такая работа системы может быть реализована посредством командного прибора CAN-связи, но, как описано выше, существует необходимость устранения проблем, которые могут возникнуть из-за сбоя CAN-связи, посредством электросхем.
Из уровня техники известно решение, согласно Корейской патентной публикации № 10-2012-0136821 с приоритетом от 20.12.2012, которое предоставляет собой способ управления сбросом запуска электромобиля в качестве современного уровня технологии для решения вышеуказанных проблем.
Современный уровень технологии представляет собой способ управления сбросом запуска электромобиля для предотвращения запуска путем подачи сигналов сброса на микроконтроллеры (MCU), BMS и блок управления электромобилем (VCU), которые принимают и передают данные по линии CAN, и отслеживает данные, полученные и переданные по линии CAN. Когда передача данных прекращается по меньшей мере от одного из MCU, BMS и VCU, она применяется к кластеру. Это отличается от способа управления работой BMS с использованием внешнего сигнала, который дополнительно определяет, подается ли обычный сигнал запуска или сигнал зарядки, и заставляет батарею работать в режиме вождения или режиме зарядки.
Заявленная группа изобретений была разработана для решения проблем современного уровня техники, и их целью является обеспечение способа точного управления режимом работы BMS путем конфигурирования сигнала ключа запуска (key-run) и сигнала зарядного устройства в качестве схемы приемного устройства через отдельную цепь сигналов или отдельный внешний разъем для управления BMS.
Кроме того, задачей заявленных изобретений группы является обеспечение сигнала автоматического включения, который должен поддерживаться во включенном состоянии в течение заданного времени, даже когда BMS обнаруживает сигнал выключения ключа (key off) для выполнения последовательности выключения после обычного резервного копирования записи и тому подобного.
Входящее в состав заявленной группы устройство управления работой BMS, соединенное с блоком управления транспортным средством согласно заявляемому изобретению, обнаруживает линию связи CAN для управления BMS через блок управления транспортным средством и сигнал ключа запуска для управления, и сигнал ключа запуска передается в модуль MCU BMS для приема сигнала, когда блок управления получает команду, определяется, что оно находится в режиме привода, и когда обнаружен сигнал зарядного устройства и получено сообщение зарядки, определяется, что оно находится в режиме зарядки для управления BMS.
Кроме того, приемник сигнала запуска ключа и приемник сигнала зарядного устройства подключены к схеме BMS через любую отдельную сигнальную линию или отдельный внешний разъем, отличающийся от линии связи CAN.
Кроме того, модуль микроконтроллера может останавливать работу батареи, когда обнаружен сигнал ключа запуска, не получено управляющее сообщение привода или когда обнаружен сигнал зарядного устройства, не получено управляющее сообщение зарядки.
Кроме того, у модуля заявленного устройства есть особенность, которая позволяет создавать резервные копии данных, если обнаружен сигнал key-off и поддерживается включенное состояние (turn-on) у блоков сигналов саморазряда в течение определенного времени при запуске BMS.
Кроме того, для решения вышеуказанных технологических задач заявленный способ управления BMS, соединенного с блоком управления транспортного средства, характеризуется этапом работы BMS, которая запускает батарею в одном из режимов передачи движения или режима зарядки на следующих этапах: этап обнаружения цепи внешних сигналов, которая определяет, применяется ли сигнал ключ запуска, сигнал генерации ключа для целей вождения или сигнал зарядного устройства, распознанный при подключении к устройству, которое обеспечивает питание для зарядки транспортного средства; этап определения таких активных режимов, как режим передачи движения при определении сигналов key-run и приеме управляющих сообщений о движении, и режим зарядки при определении сигналов заряда (Charger) и приеме управляющих сообщений о заряде; и вышеуказанные этапы определения движения.
Этап определения работы заявленных изобретений группы имеет особенность приостанавливать работу батареи, если при обнаружении сигналов key-run нет приема управляющих сообщений о приводе (Drive) или при обнаружении сигналов о зарядке нет приема управляющих сообщений о зарядке (Charger).
К тому же, на этапе работы BMS у заявляемых изобретений группы есть особенность, которая позволяет создавать резервные копии данных, если обнаружен сигнал key-off и поддерживая включенное состояние (turn-on) у блоков сигналов саморазряда в течение определенного времени при запуске BMS.
Сигналы key-run и Charger в заявляемом устройстве могут быть обнаружены приемником сигнала ключа запуска или приемником сигнала зарядного устройства, подключенным к схеме BMS через любую отдельную цепь сигналов или отдельный внешний разъем, отличающийся от линии связи CAN.
Заявленная группа изобретении с помощью устройства и способа управления работой BMS с использованием внешнего сигнала может поддерживать стабильную работу батареи путем устранения неисправности, которая может возникнуть, когда батарея приводится в действие только посредством CAN-связи с использованием сигнала запуска ключа или входного сигнала зарядного устройства, предоставляемого в отдельной внешней линии или внешнем разъеме.
Заявленные изобретения подтверждают двойную структуру за счет избыточного определения командного сообщения, переданного по каналу связи CAN, и сигнала, обнаруженного с помощью устройств H/W, с использованием сигнала запуска ключа или входного сигнала зарядного устройства в дополнение к вспомогательному питанию, тем самым обеспечивая более надежную работу аккумулятора.
Заявляемая группа изобретений обеспечивает нормальное резервное копирование предыдущих записей, даже если BMS обнаруживает сигнал выключения ключа, путем поддержания состояния включения в течение заданного времени, даже если он выключен.
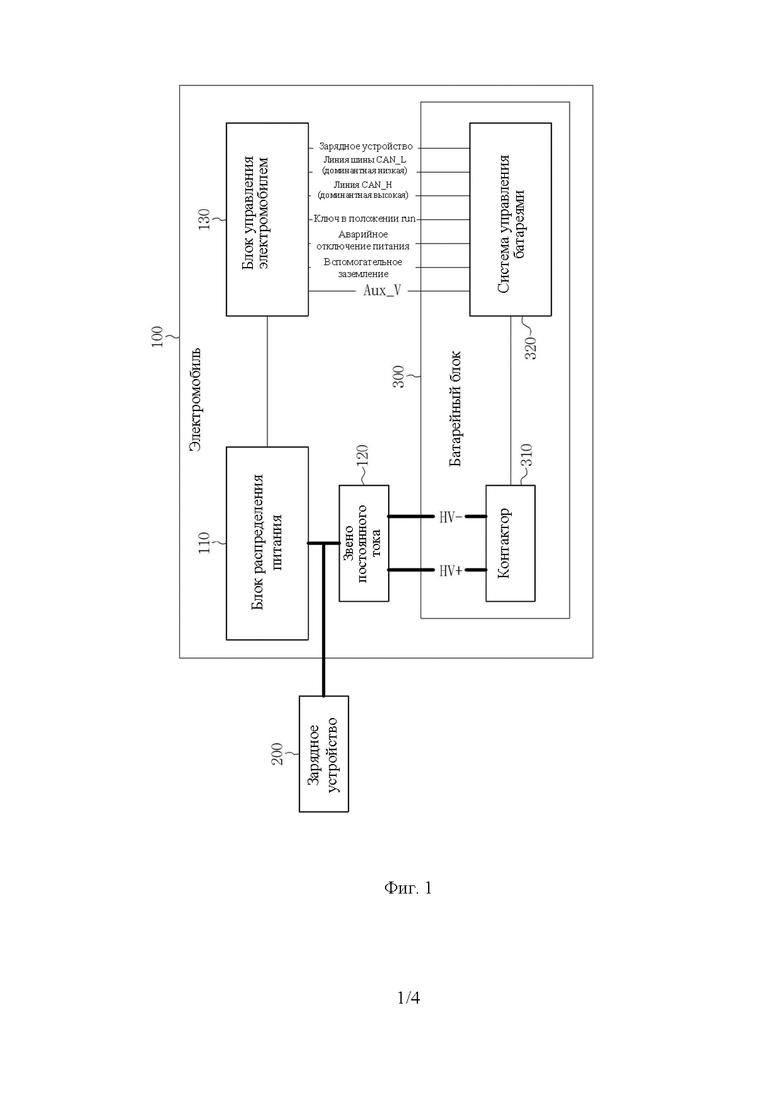
На Фиг.1 представлена общая концептуальная схема, иллюстрирующая конфигурацию соединения аккумуляторного блока с внешним зарядным устройством в электромобиле, согласно заявленному устройству управления работой BMS.
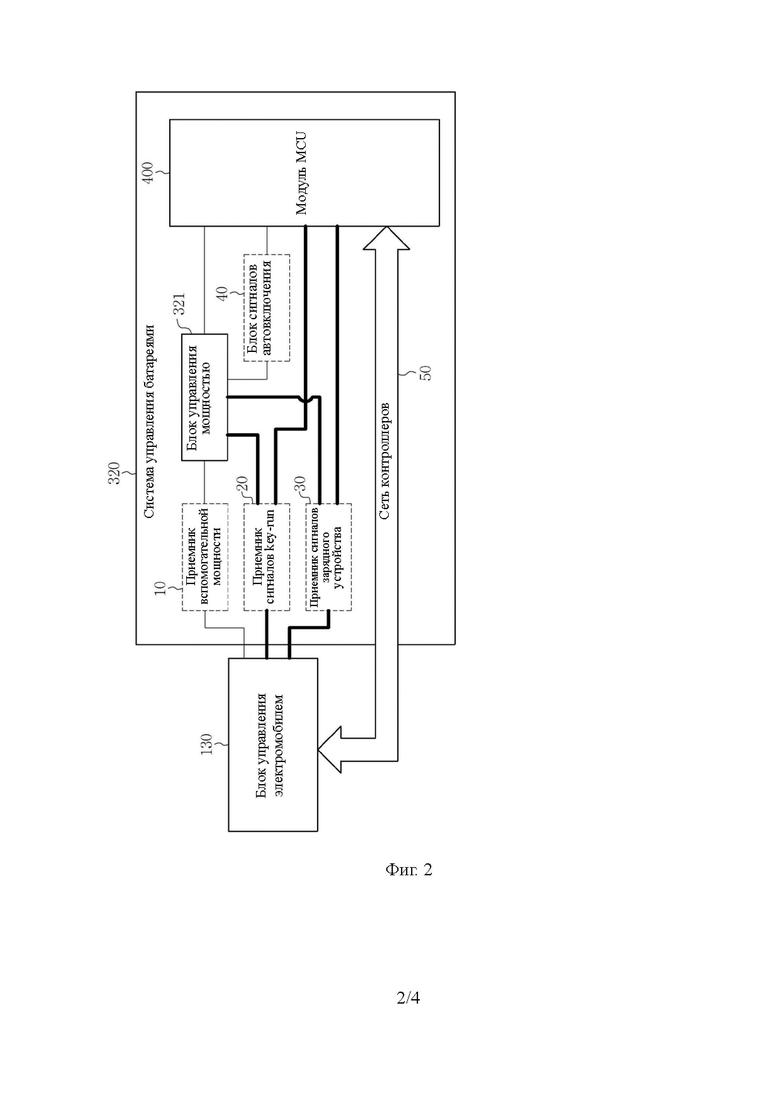
На Фиг. 2 проиллюстрирована концепция устройства обработки сигналов работы BMS в соответствии с заявленным устройством управления работой BMS.
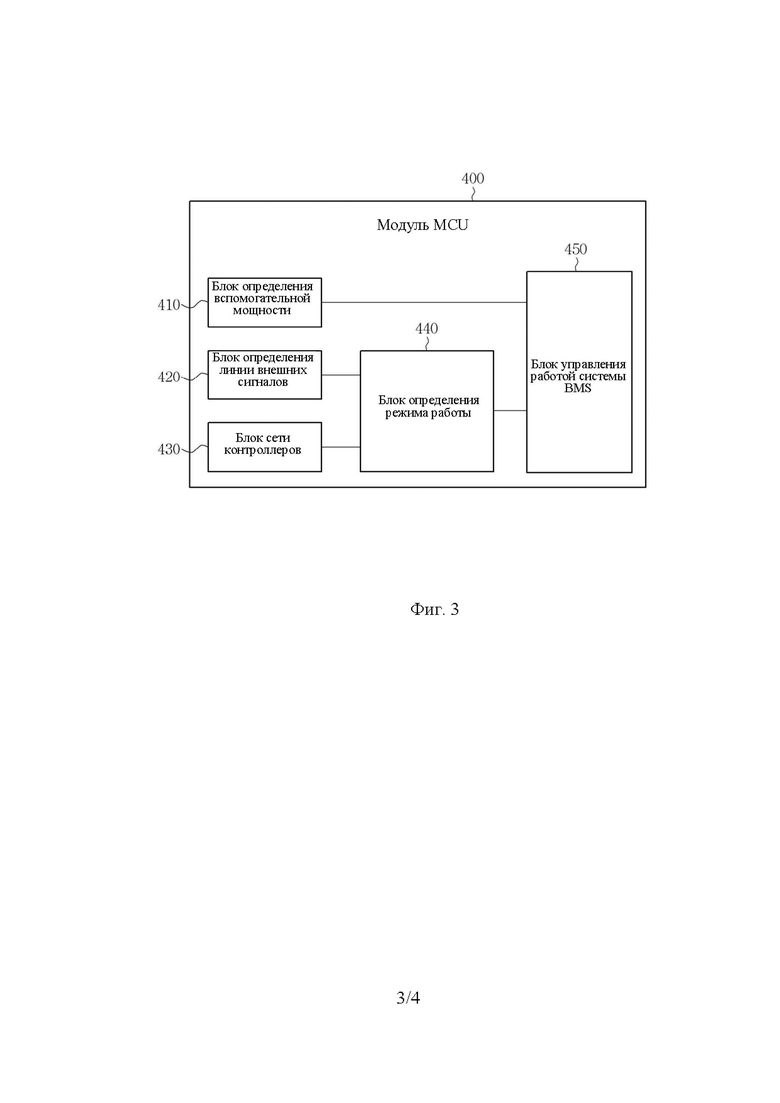
На Фиг. 3 представлена структура блока модуля микроконтроллера в заявленном устройстве управления работой BMS.
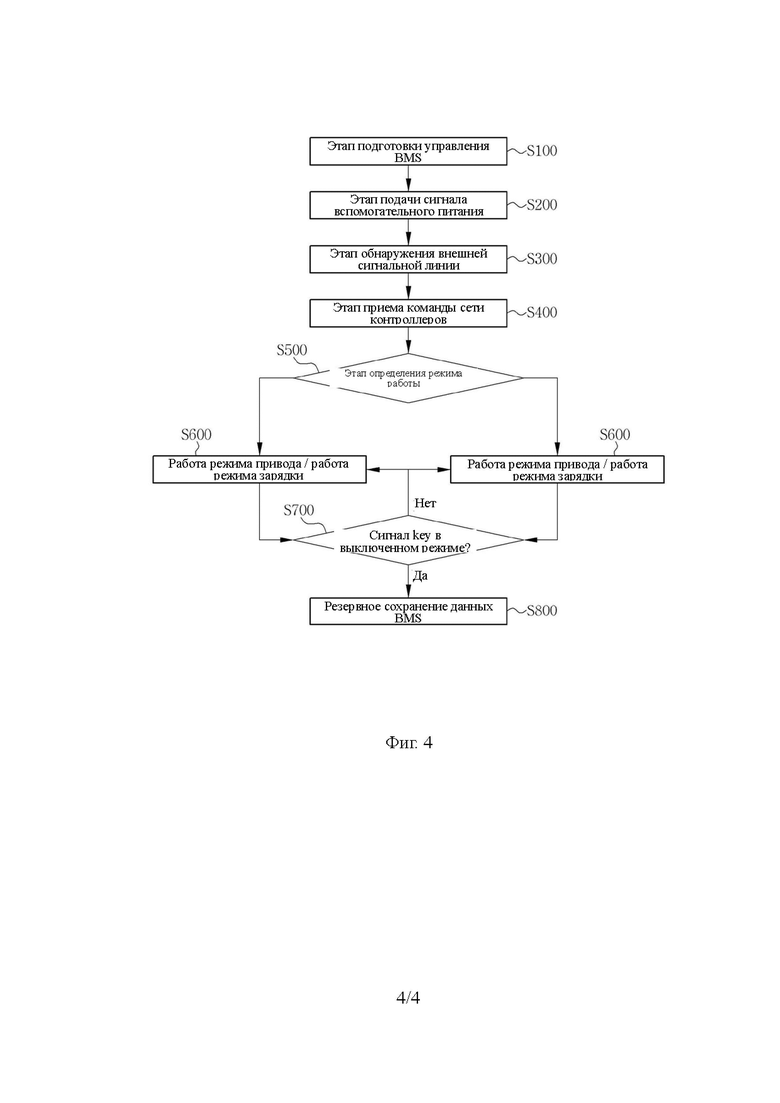
На Фиг. 4 представлена блок-схема заявленного способа управления работой BMS с использованием внешнего сигнала.
Термины и слова, используемые в описании и формуле изобретения, не должны толковаться как ограниченные общими или словарными значениями, а должны толковаться как значения и понятия, соответствующие технической идее данного изобретения, основанные на принципе, что изобретатель может надлежащим образом определить концепцию наилучшим образом.
Следовательно, следует понимать, что конфигурации, показанные в вариантах осуществления и чертежах, описанных в настоящем описании, являются только наиболее предпочтительными вариантами эксплуатации настоящего изобретения и не представляют всю техническую идею настоящего изобретения, и, таким образом, могут быть различные способы эксплуатации и модификации.
Далее предпочтительный вариант реализации и использования заявленных изобретений, составляющих группу, будет подробно описан со ссылкой на прилагаемые чертежи.
Фиг. 1 представляет собой общий концептуальный вид, иллюстрирующий конфигурацию соединения между аккумуляторным блоком и внешним зарядным устройством в электромобиле.
Фиг. 2 представляет собой примерный вид для описания концепции обработки сигналов работы BMS в заявляемом устройстве.
Как показано на Фиг. 1-2, электромобиль (далее - «транспортное средство») (100) и аккумуляторная батарея или аккумуляторный блок (300) подключены к линии (120) постоянного тока для поддержания постоянного напряжения, когда блок распределения питания (PDU) (110) и внешнее зарядное устройство (200) в транспортном средстве преобразуются через кабельную линию и имеют батарейный блок (300).
Для запуска и управления аккумуляторным блоком (300) блок управления электромобилем (130), для управления BMS (320) внутри аккумуляторного блока (300) связан с микроконтроллером MCU (400), в котором смонтировано встроенное приложение управления.
Блок управления электромобилем (130) представляет собой электронное устройство управления, которое служит для управления различными устройствами (оборудованиями) в транспортном средстве и может также называться электронным блоком управления (ECU) и осуществлять связь с использованием протокола CAN.
Сеть CAN (Controller Area Network) относится к стандарту связи, разработанному для микроконтроллеров или устройств для обмена данными друг с другом без главного компьютера в транспортном средстве.
Модуль MCU (400) представляет собой модуль микроконтроллера для управления общим приводом и работой в BMS и для выполнения CAN-связи, который можно назвать микрокомпьютером (Mi-com).
Следовательно, сеть CAN связывается с источником питания для управления внутренней BMS через блок управления электромобилем (130) и управляющие сообщения команды запуска ключа или управляющие сообщения зарядки, а также данные для управления батареей и проверки состояния, предупреждения, ошибки и т.п.
Следовательно, после подачи питания от вспомогательного источника (от 12 В до 24 В) BMS приводится в действие для диагностики состояния батареи, проверки того, работает ли контактор (310), который является переключателем батареи, а затем получает сообщение о движении или зарядке от блока управления электромобилем (130) для работы аккумулятора.
То есть обычная BMS (320) управляет батареей посредством подачи сигнала через вспомогательное питание и передачи данных команд запуска и управления, полученных через сеть CAN, и имеет только структуру, в которой батарея может фактически заряжаться и разряжаться.
Таким образом, на Фиг. 2 представлен примерный вид для объяснения концепции обработки сигналов работы BMS, согласно заявленному устройству управления работой BMS, и BMS по настоящему изобретению принимает один или более внешних сигналов, передаваемых через блок управления электромобилем (130).
Приемник сигнала вспомогательного источника питания (10) принимает начальный сигнал вспомогательного источника питания, подаваемый от устройства вспомогательного источника питания (AUX POWER SUPPLY).
В этом случае вспомогательная мощность позволяет схеме BMS работать через блок управления питанием (321). Соответственно, блок управления мощностью (321) BMS (320) приводится в действие, питание подается на модуль микроконтроллера (400), и BMS (320) готовится к запуску, и блок управления мощностью (321) может поддерживать сигнал, способный продолжать работать через блок сигналов автоматического включения (40).
Блок управления мощностью (321) может включать в себя вспомогательный вход питания и может быть модулем для подачи питания BMS по меньшей мере одним полевым транзистором (FET), переключающим регулятором, диодом и т.д.
Блок сигнала автоматического включения (самозаряда) (40) относится к схеме, генерирующей сигнал саморазряда, и генерирует сигнал для управления внутренними компонентами устройств BMS (320) для поддержания непрерывной работы.
В этом случае BMS, согласно настоящему изобретению, реализована с помощью схемы H/W, выполненной в виде любой отдельной сигнальной линии и отдельного внешнего разъема, так что приемник сигнала запуска ключа (20) или приемник сигнала зарядного устройства (30), вводимый через блок управления электромобилем (130), отличается от сети CAN (50).
Соответственно, когда блок приема сигнала запуска ключа (20) или блок приема сигнала зарядного устройства (30) подключены к сигналу запуска ключа, указывающему сигнал генерации ключа для управления электромобилем или устройством, которое обеспечивает питание для зарядки электромобиля, блок управления электромобилем (130) осуществляет функцию передачи в модуль MCU и определения данных сигналов.
Соответственно, становится возможным обеспечить более четкую работу за счет управления силовым приводом BMS, обнаруживая дополнительно внешние сигналы, помимо сигналов о запуске BMS, в соответствии с подачей вспомогательного питания.
В связи с этим, когда сигнал Key-run подается от приемника Key-run (20), он передается к модулю MCU (400) системы BMS, и после становится обнаруженным. Затем сигнал сравнивается с переданной от модуля MCU (400) по сети сигналов CAN (50) командой о запуске (Drive), и проверяется их соответствие. И после происходит управление запуском электромобиля с помощью режима запуска (Drive mode).
Также, даже во время зарядки система BMS (320) получает сигналы питания вспомогательного источника в батарее через блок управления электромобилем (130), запуская блок управления мощностью (321) системы BMS, модуль MCU (400) получает питание, система BMS становится готова к работе, сохраняются сигналы для продолжительной работы блока управления мощностью (321) через self-on приемник (40).
Также сигнал о зарядке поступает в модуль MCU (400) через приемник сигналов о зарядке (30), соединенный с блоком управления электромобилем (130).
В этот момент, модуль MCU (400) получает команду о зарядке (Charger) по сети сигналов CAN (50). Команда сравнивается с сигналом зарядки, и проверяется их соответствие. Затем становится возможным управление электромобилем с помощью режима зарядки (Charge mode).
Когда модуль MCU (400) не получает сообщений с командой о запуске (Drive) с сигналом Key-run или сообщений с командой о зарядке (Charger) с сигналом Charger, это распознается как ошибка, после чего появляется ошибка и приостанавливается работа батарейного блока.
Иными словами, система BMS (320), согласно заявленному устройству управления работой BMS, может приводить в действие аккумулятор в режиме привода или в режиме зарядки с помощью сигнала key-run или сигнала зарядного устройства, считываемого через отдельную сигнальную линию или отдельный внешний разъем от блока управления электромобилем (130), и двойной проверки в соответствии с командой, полученной через линию сети CAN (50).
Как описано выше, когда схема BMS (320) одновременно проверяет внешние сигналы блока управления электромобилем (130) и команды сети CAN и приводит в действие аккумулятор, становится возможно эксплуатировать систему BMS, способную предотвратить неисправности и сбой связи, вызванные ошибкой водителя в управлении.
Когда BMS (320) работает в режиме привода или в режиме зарядки с помощью таких внешних сигналов, BMS (320) генерирует сигнал автоматического включения self-on (40) для поддержания рабочего состояния. В этом случае, когда внезапно становится режим key-off, BMS (320) сразу же производит отключение и может возникнуть проблема с резервным сохранением данных.
Для этого реализовано осуществление последовательности отключения после нормального резервного сохранения данных, даже если обнаружены сигналы key-off в схеме BMS (320), блок управления электромобилем (321) в системе BMS (320) приводится в действие на заданное время для поддержания режима включения On на протяжении установленного времени сигналов self-on (40).
Иными словами, схема BMS (320) по данному изобретению автоматически генерирует сигнал самовключения self-on (40) при обнаружении сигнала выключения key-off и подает сигнал на управляющий полевой транзистор включения/выключения блока управления питанием (321) в течение заданного времени для поддержания включения, следовательно, обеспечивая резервное копирование путем поддержания регулятора напряжения постоянного включенного состояния в течение заранее определенного времени.
На Фиг. 3 представлена структурная схема модуля микроконтроллера, согласно заявленному устройству управления работой BMS. Как показано на Фиг.3, модуль микроконтроллера (400), согласно заявленному устройству, может включать в себя блок определения вспомогательной мощности (410), блок обнаружения внешней сигнальной сети (420), блок сети CAN (430), блок определения режима работы (440) и блок управления работой BMS (450).
Блок обнаружения внешней сигнальной сети (420) функционирует для обнаружения сигнала запуска ключа, передаваемого через блок приема сигнала запуска ключа Key-run (20) или блок приема сигнала зарядного устройства (30), подключенный к блоку управления электромобилем (130) через отдельную сигнальную линию или отдельный внешний разъем.
Блок связи CAN (430) принимает данные команд и сигналов от блока управления транспортным средством (130) и передает состояние батареи, предупреждение и сигнал ошибки в блок управления электромобилем (130). Соответственно, блок связи CAN (430) может принимать команду привода или командное сообщение зарядного устройства.
Блок определения режима работы (440) выполняет функцию сравнения и определения команды привода или команды зарядного устройства, полученной от блока сети CAN (430), с сигналом запуска ключа или сигналом зарядного устройства от блока обнаружения внешней сигнальной сети (420), определяет режим привода и принимает режим зарядки.
В этом случае, когда обнаружен сигнал запуска ключа, но не получено командное сообщение привода, или обнаружено командное сообщение зарядного устройства, но командное сообщение зарядного устройства не получено или такие сообщения не соответствуют друг другу, генерируется сообщение об ошибке и работа аккумуляторного блока прекращается.
Блок управления работой BMS (450) функционирует для приведения BMS в один из режимов привода и режима зарядки, определяемых блоком определения режима работы (440).
Кроме того, когда сигнал выключения ключа обнаруживается при приведении в действие BMS, блок управления работой BMS (450) может выполнять функцию поддержания сигнала автоматического включения (40) во включенном состоянии в течение заданного времени для резервного копирования предыдущей записи.
На Фиг. 4 представлена блок-схема, иллюстрирующая заявляемый способ управления работой BMS с использованием внешнего сигнала.
Способ управления работой системы BMS, входящий в заявленную группу изобретений, может включать в себя этап подготовки управления BMS (S100), этап подачи сигнала вспомогательного питания (S200), этап обнаружения внешней сигнальной линии (S300), этап приема команды сети CAN (S400), этап определения режима работы (S500) и этап управления BMS (S600).
Этап подготовки управления BMS (S100) может быть этапом, на котором блок управления электромобилем ожидает сигнала пользователя.
Этап подачи вспомогательного питания (S200) представляет собой этап, на котором блок управления питанием BMS работает при подаче вспомогательного питания, питание подается на модуль MCU, BMS готовится к запуску, и может поддерживаться сигнал через блок сигналов автоматического самоподключения self-on.
Этап обнаружения внешней сигнальной линии (S300) представляет собой этап проверки того, подается ли сигнал запуска ключа key-run или входной сигнал зарядного устройства через отдельную сигнальную линию или внешний разъем, предусмотренный в схеме H/W в соответствии с настоящим изобретением.
Этап приема команды сети CAN (S400) представляет собой этап приема команды привода или команды зарядного устройства через сигнал сети CAN.
Этап определения режима работы (S500) представляет собой этап проверки сигнала запуска ключа или входного сигнала зарядного устройства, введенного в качестве внешнего сигнала, и команды привода или команды зарядного устройства, полученной в качестве команды сети CAN.
То есть, на этапе определения режима работы (S500), когда команда привода через этап приема команды сети CAN (S400) и сигнал запуска ключа через этап обнаружения внешней сигнальной линии (S300) совпадают, генерируется сообщение об ошибке, и аккумуляторный блок перестает работать.
Кроме того, этап определения режима работы (S500) определяет команду зарядного устройства через этап приема команды сети CAN (S400) и сигнал зарядного устройства через этап обнаружения внешней сигнальной линии (S300), и если такая линия не обнаруживается, генерируется сообщение об ошибке, и аккумуляторный блок перестает работать.
Соответственно, этап управления BMS (S600) представляет собой этап управления батареей в состоянии режима привода, когда обнаружен сигнал запуска ключа и получено командное сообщение привода, и в состоянии режима зарядки, когда обнаружен входной сигнал зарядного устройства и получено командное сообщение зарядного устройства.
В этом случае порядок этапа обнаружения внешней сигнальной линии (S300) и этапа приема команды сети CAN (S400) может быть изменен.
И на этапе работы BMS (S600), когда обнаруживается сигнал выключения ключа (S700), сигнал автоматического включения автоматически поддерживается во включенном состоянии в течение заданного времени, тем самым выполняя этап резервного сохранения данных (S800), позволяя регулятору напряжения постоянного тока поддерживать включенное состояние в течение заранее определенного времени.
Как описано выше, в подробном описании заявляемых изобретений группы описаны предпочтительные варианты осуществления, но следует понимать, что любой специалист в данной области может по-разному модифицировать и изменять настоящие изобретения в рамках идеи и области заявленных изобретений, описанных в формуле заявленных изобретений группы.
Изобретение относится к способу управления работой BMS с использованием внешнего сигнала, взаимосвязанного с блоком управления транспортным средством. Способ заключается в применении следующих этапов: этапа обнаружения внешней сигнальной линии; этапа приема команды сети CAN; этапа обнаружения сигнала запуска ключа и режима работы определения режима привода; этапа работы BMS по эксплуатации батареи. Этап обнаружения внешней сигнальной линии заключается в определении, применяется ли сигнал запуска ключа или сигнал зарядного устройства. Сигнал запуска ключа генерируется ключом и предназначен для вождения. Сигнал зарядного устройства распознается при подключении к устройству, обеспечивающему питание для зарядки транспортного средства. Команда сети CAN характеризует команду привода или командное сообщение зарядного устройства по линии сети CAN. Обнаружение сигнала запуска ключа и режима работы определения режима привода характеризует получение командного сообщения привода и режима зарядки при обнаружении сигнала зарядного устройства и зарядки при получении командного сообщения зарядного устройства. Работа BMS по эксплуатации батареи происходит в одном из режимов привода и режима зарядки, определенных на этапе обнаружения режима работы. Если на этапе работы BMS обнаруживается сигнал отключения ключа, сигнал автоматического включения для саморазряда поддерживается во включенном состоянии в течение заданного времени, чтобы создать резервную копию данных. Достигается обеспечение резервного копирования записей. 2 з.п. ф-лы, 4 ил.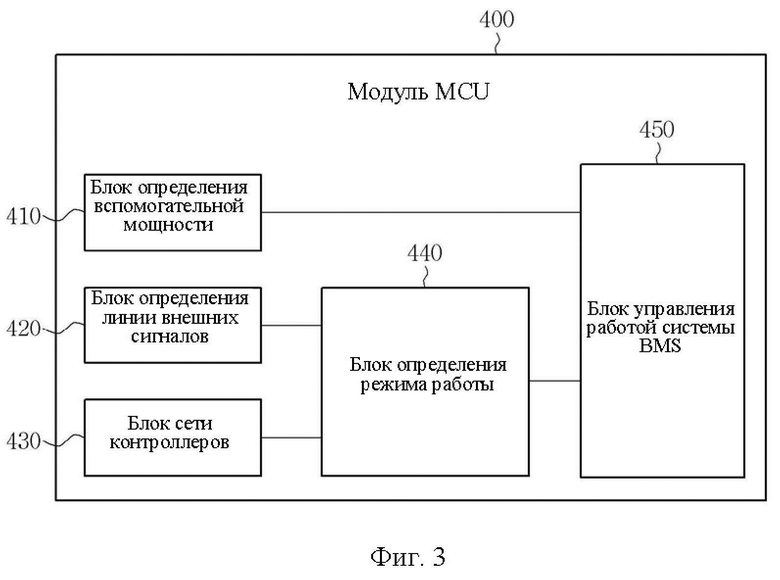
1. Способ управления работой BMS с использованием внешнего сигнала, взаимосвязанного с блоком управления транспортным средством, заключается в применении следующих этапов:
этапа обнаружения внешней сигнальной линии, который заключается в определении, применяется ли сигнал запуска ключа, генерируемый ключом сигнал, предназначенный для вождения, или сигнал зарядного устройства, распознанный при подключении к устройству, которое обеспечивает питание для зарядки транспортного средства;
этап приема команды сети CAN, который принимает команду привода или командное сообщение зарядного устройства по линии сети CAN;
этап обнаружения сигнала запуска ключа и режима работы определения режима привода при получении командного сообщения привода и режима зарядки при обнаружении сигнала зарядного устройства и зарядки при получении командного сообщения зарядного устройства;
этап работы BMS по эксплуатации батареи в одном из режимов привода и режима зарядки, определенных на этапе обнаружения режима работы, при этом
в случае, когда на этапе работы BMS обнаруживается сигнал отключения ключа, сигнал автоматического включения для саморазряда поддерживается во включенном состоянии в течение заданного времени, чтобы создать резервную копию данных.
2. Способ по п. 1, отличающийся тем, что этап определения режима работы характеризуется тем, что способ управления работой BMS с использованием внешнего сигнала прекращается, когда обнаруживается командное сообщение привода при обнаружении сигнала запуска ключа или не принимается командное сообщение зарядки при обнаружении сигнала зарядного устройства.
3. Способ по п. 1, отличающийся тем, что сигнал запуска ключа или сигнал зарядного устройства обнаруживается приемником сигнала запуска ключа или приемником сигнала зарядного устройства, подключенным к схеме BMS через любую отдельную сигнальную линию или отдельный внешний разъем, отделенный от линии сети CAN.
| KR 20180087014 A, 01.08.2018 | |||
| KR 20150029239 A, 18.03.2015 | |||
| JP 2010172137 A, 05.08.2010 | |||
| KR 20130104149 A, 25.09.2013 | |||
| KR 20190051477 A, 15.05.2019. |

