Настоящие изобретения, составляющие группу, относятся к устройствам защиты аккумуляторных батарей (предохранителям) и способу их работы, и, в частности, к предохранителям батареи системы BMS (система управления батареями), которые использует аварийные сигналы, что позволяет безопасно эксплуатировать аккумуляторные батареи за счет управления приводом батареи в соответствии с зафиксированными аварийными сигналами, которые подаются от датчика столкновения, установленного внутри транспортного средства (на внешней части батарейного блока) через электронный блок управления (ECU) с помощью отдельной сигнальной линии для управления приводом батареи в соответствии с аварийным сигналом.
Спрос на электромобили (EV) и системы накопления энергии (ESS), использующие вторичные батареи, растет из-за ужесточения экологических норм, возможности истощения запасов нефти и сохраняющихся высоких цен на нефть. Если в качестве решения экологической проблемы транспортных средств с двигателем внутреннего сгорания будет развернут политический курс на расширение распространения электромобилей, по мере появления новых источников спроса, таких как рост рынка электромобилей и системы накопления энергией, ожидается, что средние и большие аккумуляторные батареи будут востребованы на другом уровне.
Электромобили подразделяются на электромобили (EV), которые приводят в действие электропривод, гибридные электромобили (HEV), которые приводят в действие двигатель и электропривод, и электромобили на топливных элементах (FCEV), которые приводят в действие электропривод с помощью энергии, вырабатываемой топливным элементом.
Электромобили включают в себя аккумуляторные батареи в качестве средства накопления энергии для подачи энергии на электропривод в дополнение к электроприводам для привода транспортного средства, и, например, хорошо известны никель-водородные и литий-полимерные аккумуляторные батареи.
Такая батарея может быть выполнена в виде батарейного блока, в котором множество батарейных модулей объединены последовательно или параллельно.
Питание для привода электромобиля может подаваться от батареи, которая выделяет тепло, и из-за тепла, выделяемого батареей, разряд батареи ускоряется, а величина тока заряда снижается, что ухудшает производительность батареи, и, следовательно, охлаждение батареи имеет важное значение.
Существует способ воздушного охлаждения для охлаждения батареи потоком воздуха и способ водяного охлаждения для охлаждения батареи охлаждающей жидкостью, например водой, для снижения температуры, выделяемой при работе батареи.
Хотя способ водяного охлаждения обладает высокой эффективностью охлаждения, это может представлять большую угрозу для безопасности аккумуляторного блока, если охлаждающая его вода протекает в зависимости от герметичности самой батареи. В частности, вода является проводящим материалом, и когда в соединенной с ней детали проходит высокое напряжение, может произойти короткое замыкание, из-за чего может возникнуть пожар. Когда в литиевой батарее происходит пожар, его труднее потушить, чем обычный пожар, что в тяжелых случаях может привести ко взрыву.
Кроме того, когда литиевая батарея в форме чехла непрерывно подвергается воздействию воды, место соединения самого чехла расплавляется, обнажая электрод и электролит в батарее, тем самым вызывая утечку электролита и короткое замыкание в батарее, и в этом случае также может произойти пожар.
Кроме того, когда происходит столкновение из-за аварии транспортного средства или тому подобного во время работы аккумуляторной батареи электромобиля, может потребоваться аварийная остановка аккумуляторной батареи, и, таким образом, при возникновении ситуации столкновения может потребоваться быстрый останов в работе батареи и транспортного средства.
Однако в большинстве случаев, поскольку обычный электромобиль не использует отдельный сигнал для внешнего столкновения аккумулятора, а использует отдельный датчик в аккумуляторе, когда столкновение происходит из-за аварии транспортного средства во время работы аккумулятора, могут произойти вторичные и третичные аварии.
Кроме того, когда на батарее установлен отдельный датчик, столкновение может быть обнаружено, но бывают случаи, когда условия не выполняются и не могут быть обнаружены.
Как описано выше, в случае обычного электромобиля существует проблема, связанная с трудностями быстрого реагирования при внешнем столкновении транспортного средства.
Поэтому для решения вышеуказанных проблем настоящие изобретения группы были созданы в попытке обеспечить способ защиты системы управления аккумулятором с использованием аварийного сигнала, который подается по отдельной сигнальной линии через электронный блок управления (ECU), установленный в транспортном средстве (вне аккумуляторной батареи).
Другими словами, заявляемые изобретения, относящиеся к устройству управления батареей и способу защиты батареи с использованием аварийного сигнала для выполнения стабильной работы батареи путем управления BMS для прекращения использования батареи через линию сети CAN в системе BMS.
Согласно заявленному изобретению, установленное на внешней стороне аккумуляторного блока устройство защиты аккумулятора распознает столкновение транспортного средства и выдает сигнал, обнаруженный с помощью сенсора столкновения, принимает информацию о столкновении, полученную от аккумуляторного блока, и отображает сообщение о сбое на панели дисплея.
Аварийный сигнал, подаваемый от блока управления транспортного средства к батарейному блоку (аккумулятору), может подаваться по отдельной линии аварийных сигналов, а информация об аварии транспортного средства, передаваемая от батарейного блока к блоку управления транспортного средства, может подаваться по линии сети CAN.
Коннектор батарейного блока, который переключает привод батареи в действие в соответствии с полученным сигналом управления приводом батареи. Система BMS подает управляющий сигнал для управления приводом батареи к коннектору батареи в соответствии с изменением аварийного сигнала транспортного средства, принимаемого от блока управления транспортного средства по линии аварийных сигналов.
BMS принимает аварийный сигнал через блок управления транспортного средства, выдает аварийный сигнал и распознает высокий-низкий период импульсов для аварийного сигнала, подаваемого через приемник аварийных сигналов, и может включать в себя управляющий сигнал для прекращения работы батареи на коннектор батареи.
BMS может дополнительно включать в себя блок сети CAN, который генерирует данные о возникновении аварии транспортного средства и затем передает их блоку управления транспортным средством вне батарейного блока (аккумулятора), когда устройство управления определяет, что происходит столкновение транспортного средства.
Когда высокие и низкие сигналы для импульсов аварийного сигнала транспортного средства, подаваемого через приемник аварийных сигналов, принимаются в заданный период, устройство управления определяет, что столкновения транспортного средства не происходит, и может выполнять команду в соответствии с последовательностью движения, не прекращая движение (привод) аккумулятора.
Аккумуляторная батарея в соответствии с другим аспектом настоящего изобретения может включать в себя линию аварийных сигналов, подключенную к электронному блоку управления (ECU) транспортного средства; линию сети CAN, подключенную к ECU транспортного средства для передачи данных об аварии транспортного средства в ECU; коннектор батарейного блока для переключения батареи через сигнал управления сбоем работы батареи.
В состав системы BMS входит приемное устройство аварийных сигналов датчика столкновения, которое выдает полученные сигналы, распознающие столкновение транспортного средства, через блок управления транспортного средства. Отслеживаются верхние и нижние пределы пульсовых колебаний аварийных сигналов, подаваемых через приемник аварийных сигналов, тем самым определяется возникновение столкновения транспортного средства. Когда непрерывно отслеживаются высокие пределы колебаний аварийных сигналов в течение заданного периода, устройство управления, входящий в состав системы BMS, выдает сигналы управления в коннектор батареи для прекращения ее работы.
BMS также включает в себя блок сети CAN, который по линии сети CAN выдает и предоставляет сгенерированные данные об аварии транспортного средства блоку управления транспортного средства вне аккумуляторного блока, когда блок управления определяет, что происходит столкновение транспортного средства.
Когда в заданный период отслеживаются верхние и нижние пределы пульсовых колебаний аварийных сигналов, подаваемые через приемник аварийных сигналов, устройство управления определяет, что столкновения транспортного средства не происходит, и выполняет команды в соответствии с последовательностью движения, не прекращая работы аккумулятора.
Между тем, в заявленный способ защиты аккумулятора в соответствии с другим аспектом настоящего изобретения входит: этап подачи аварийных сигналов в блок управления транспортного средства (ECU) путем определения того, произошло ли столкновение транспортного средства с использованием датчика столкновения, установленного снаружи аккумуляторного блока; этап подачи аварийных сигналов из ECU в батарейный блок; этап определения наличия столкновения после того, как были приняты аварийные сигналы датчиков столкновения, переданные от батарейного блока в ECU, этап передачи данных о возникновении аварии в ECU, когда определяется столкновение транспортного средства, и этап остановки работы батареи; этап отображения сообщения о сбое на дисплее панели после получения данных о возникновении аварии, переданных от ECU и от батарейного блока.
Переданные из ECU в батарейный блок, аварийные сигналы датчиков столкновения подаются по отдельной линии аварийных сигналов, данные о столкновении, переданные из батарейного блока в ECU, подаются по линии сети CAN.
К этапам остановки работы батареи относятся этап подачи сигналов управления с помощью коннектора батарейного блока для управления работой батареи в зависимости от изменения аварийных сигналов, полученных по линии аварийных сигналов из ECU; этап управления работой батареи из-за переключения контактора батареи внутри батарейного блока, согласно сигналам управления работой ECU.
На этапе подачи сигналов управления в коннектор батареи, когда в заданный период принимаются высокие и низкие импульсы аварийного сигнала датчика столкновения транспортного средства, подаваемого от ECU, определяется, что столкновения транспортного средства не происходит, и у переключателя коннектора аккумуляторной батареи поддерживается состояние включения, и выполняется команда в соответствии с последовательностью управления движением.
Этап подачи сигналов управления в коннектор батареи также может включать в себя этап формирования и передачи данных об аварии транспортного средства в блок управления транспортного средства (ECU), находящегося вне аккумуляторного блока, по линии сети CAN.
Также способ защиты аккумулятора в соответствии с другим аспектом настоящего изобретения включает в себя этап, в системе BMS батарейного блока, приема аварийного сигнала транспортного средства от датчика столкновения, установленного снаружи батарейного блока, от ECU по линии аварийных сигналов; этап определения того, произошло ли столкновение транспортного средства, так как были использованы сигналы датчиков столкновения, полученные по линии сигналов датчика из ECU; этап результатов определения, этап подачи системой BMS данных о столкновении с помощью ECU по линии сети CAN, когда было распознано столкновение транспортного средства, и этап подачи сигналов управления с помощью контактора внутри батарейного блока для остановки работы батареи внутри батарейного блока; этап остановки работы батареи согласно сигналам управления, полученных от разъема (контактора) батареи.
На этапе определения возникновения аварии отслеживаются верхние и нижние пределы пульсовых колебаний аварийных сигналов датчиков столкновения, полученные по линии аварийных сигналов от ECU, и когда отслеживаются высокие колебания аварийного сигнала непрерывно на протяжении заданного времени, определяется, что произошло столкновение. В случае высоких колебаний сигналов датчиков столкновения, полученных по линии сигналов столкновения от ECU, на протяжении заданного времени, определяется возникновение столкновения.
В результате определения столкновения транспортного средства, когда определено, что столкновения транспортного средства не происходит, состояние переключателя коннектора аккумуляторной батареи поддерживается включенным, и выполняется команда непрерывно в соответствии с последовательностью движения.
Согласно настоящему изобретению, аварийных сигнал, считываемый датчиком столкновения, установленным в транспортном средстве (вне аккумуляторного блока), подается по отдельной сигнальной линии через электронный блок управления (ECU), и управление приводом аккумулятора осуществляется в соответствии с аварийным сигналом, тем самым обеспечивая стабильную работу батареи.
То есть, согласно заявленному изобретению, когда используется аварийный сигнал, подаваемый от ECU, защита аккумулятора от внешних аварий и риск вторичных и третичных аварий могут быть исключены, и BMS обнаруживая аварийный сигнал, предоставляет данные транспортному средству и управляет приводом аккумулятора.
Фиг. 1-2 предназначены для того, чтобы помочь понять данный вариант осуществления. Однако технические характеристики варианта осуществления не ограничены конкретными приложениями, и признаки, раскрытые в каждом из них, могут быть объединены друг с другом для составления нового варианта осуществления.
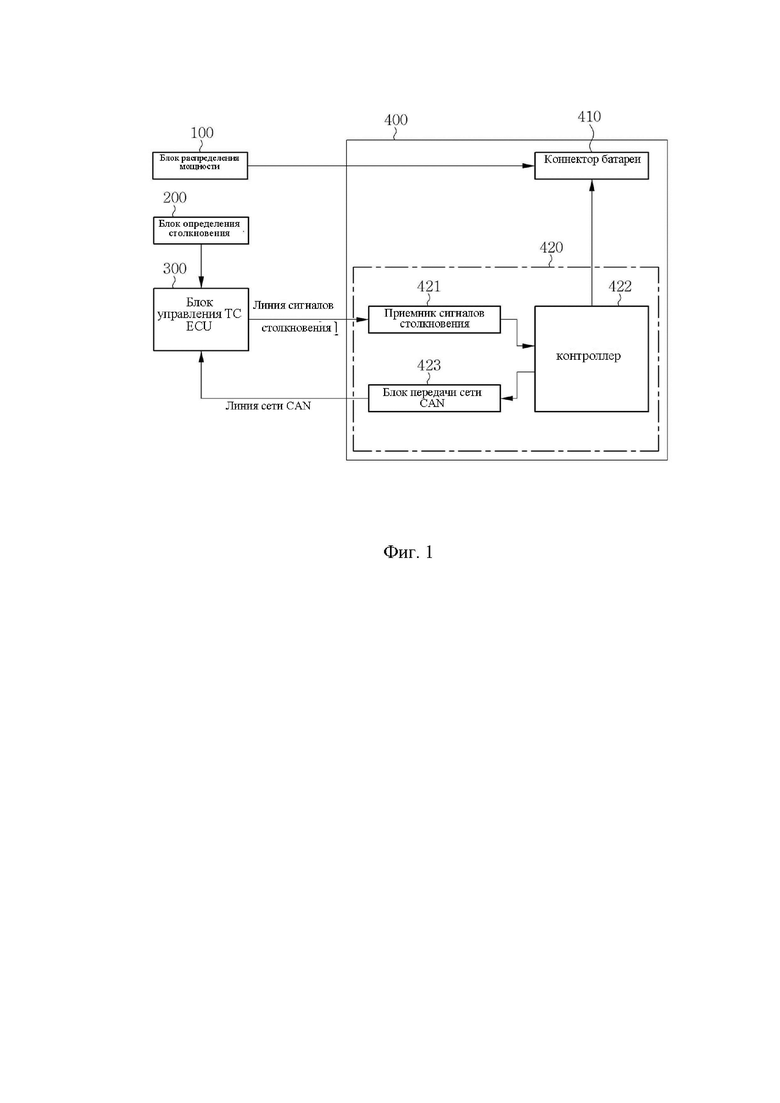
Фиг. 1 представляет собой блочную конфигурацию заявленного устройства защиты батареи системы управления батареей (BMS).
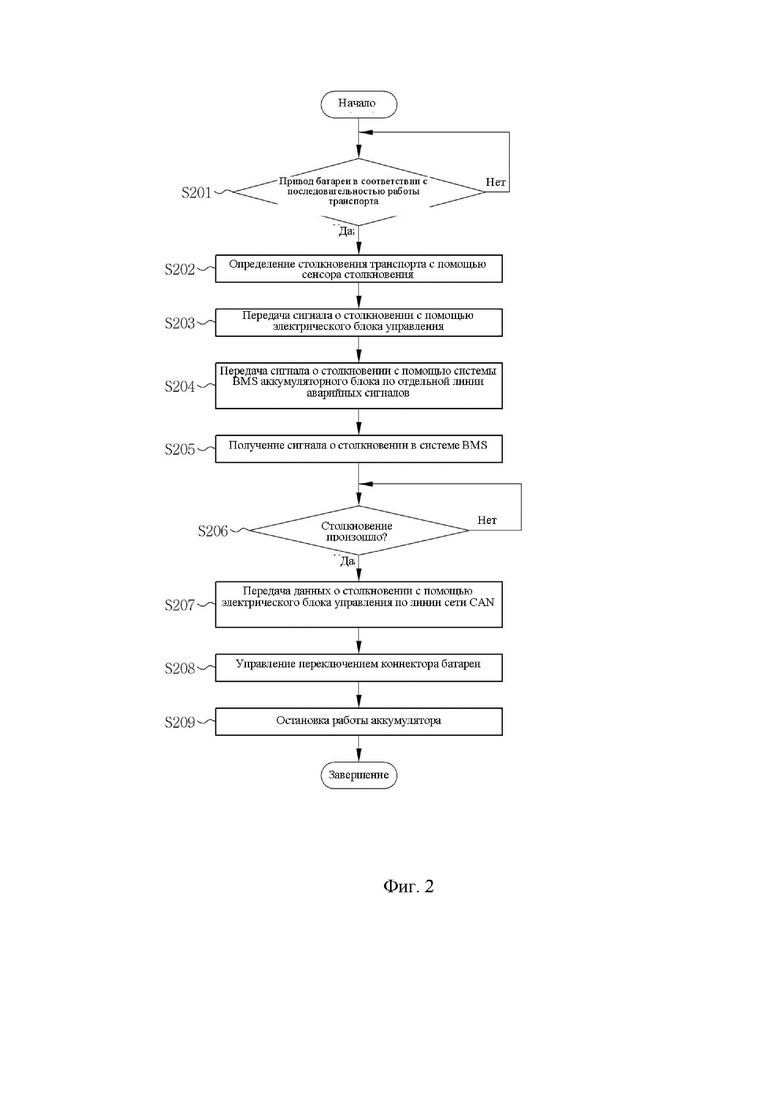
Фиг. 2 представляет собой блок-схему заявленного способа защиты батареи системы управления батареей (BMS) с использованием аварийного сигнала.
Конкретные структурные или функциональные описания вариантов осуществления настоящего изобретения, раскрытые в описании заявленной группы изобретений, проиллюстрированы только с целью описания вариантов осуществления настоящего изобретения, и варианты осуществления настоящего изобретения могут быть реализованы в различных формах и не должны толковаться как ограничивающиеся вариантами осуществления.
Поскольку для заявленных изобретений могут применяться различные изменения, и могут иметь различные формы, конкретные варианты осуществления проиллюстрированы чертежами и подробно описаны в тексте описания. Однако это не предназначено для ограничения сущности заявленных изобретений конкретной первоначальной формой и должно пониматься как включающее все изменения, эквиваленты или альтернативы, включенные в идею и технологический объем настоящего изобретения.
Такие термины, как «первый» и «второй», могут использоваться для описания различных элементов, но элементы не должны ограничиваться ими. Термины используются только с целью отличия одного компонента от другого. Например, первый компонент может называться вторым компонентом, не выходя за рамки настоящего изобретения, и аналогичным образом второй компонент также может называться первым компонентом.
Когда компонент упоминается как «подсоединенный» или «подключенный» к другому компоненту, он может быть непосредственно подсоединен или подключен к другому компоненту, но следует понимать, что другой компонент может существовать посередине. С другой стороны, когда компонент упоминается как «непосредственно подсоединенный» или «непосредственно подключенный» к другому компоненту, следует понимать, что никакого другого компонента в середине не существует.
Термины, используемые в настоящей заявке, используются только для описания конкретных вариантов осуществления и не предназначены для ограничения настоящего изобретения. Выражения в единственном числе включают выражения во множественном числе, если только они явно не подразумеваются иначе в контексте. В настоящей заявке следует понимать, что термины «включать в себя» или «иметь» предназначен для обозначения наличия раскрытых признаков, чисел, этапов, действий, компонентов, частей или их комбинации, или любых других признаков, и что это не исключает возможности наличия или добавления одного или нескольких других признаков или чисел, этапов, действий, компонентов, частей или их комбинаций.
Если не определено иное, все термины, используемые здесь, включая технические или научные термины, имеют то же значение, что и те, которые обычно понимаются специалистами в области, к которой относится настоящее изобретение. Термины, подобные тем, которые определены в широко используемых словарях, должны толковаться как имеющие значения, соответствующие значениям в контексте соответствующей технологии, и не должны толковаться как идеальные (эталонные) или чрезмерно формальные, если они четко не определены в настоящей заявке.
Между тем, когда некоторые варианты осуществления могут быть реализованы по-разному, функции или операции, указанные в конкретном блоке, могут выполняться в порядке, отличном от порядка, указанного в блок-схеме. Например, два последовательных блока могут фактически выполняться одновременно, или блоки могут выполняться в обратном порядке в зависимости от связанных функций или операций.
Далее будет подробно описаны устройство и принцип защиты батареи системы управления батареями (BMS) с использованием аварийного сигнала в соответствии с предпочтительным вариантом осуществления настоящего изобретения со ссылкой на прилагаемые изображения.
Фиг. 1 представляет собой схему, иллюстрирующую блочную конфигурацию заявляемого устройства защиты батареи BMS, использующего аварийный сигнал.
Согласно Фиг.1 заявляемое устройство защиты батареи BMS, использующее аварийный сигнал, может включать в себя блок распределения мощности (PDU), блок определения аварии (200), блок управления транспортным средством ECU (300) и батарейный блок (400). В качестве блока определения аварии (200) может быть использован датчик столкновения.
Батарейный блок (400) может включать в себя коннектор батареи (410) и систему управления батареей BMS (420), а система управления батареей BMS (420) может включать в себя приемник аварийных сигналов (421), устройство управление (422) и блок передачи сети CAN (423).
Между тем, блок управления транспортного средства (300) представляет собой электронный блок управления (ECU), который служит для управления различными устройствами (механизмами) внутри транспортного средства и может быть подключен к линии сети CAN, способной взаимодействовать с BMS (420) в батарейном блоке (400) с использованием протокола CAN и отдельной сигнальной линии для обеспечения аварийного сигнала, обнаруженного датчиком столкновения (200).
Кроме того, BMS (420) может включать в себя приемник авариных сигналов (421), устройство управления (422) и блок передачи сети CAN (423).
Хотя батарейный блок (400) и BMS (420) включают в себя множество компонентов, не показанных на Фиг. 1, содержание настоящего изобретения может быть размыто, и, таким образом, чертежи о подробной конструкции и объяснение сокращено.
BMS (420) представляет собой систему для управления батареей, которая является основным компонентом электромобиля и системы накопления энергии и играет важную роль в управлении батареей путем контроля напряжения, тока и температуры блока управления транспортного средства (300) и поддержания работы и состояния батареи (400) в оптимальном состоянии.
Соединение между транспортным средством и батарейным блоком (400) подключено к линии постоянного тока аккумулятора через линию PDU от блока распределения мощности (100), через которую аккумулятор может заряжаться и разряжаться.
Кроме того, блок управления транспортного средства (300) может быть соединен с устройством управления (422), в котором встроено управляющее приложение для управления BMS (420) в батарейном блоке (400), то есть блок передачи сети CAN (423), взаимодействующий с модулем блока микроконтроллера (MCU).
Контактор батареи (410) батарейного блока (400) может быть переключателем, подключенным к PDU (100) и BMS (420) для включения/выключения привода батареи.
Блок определения аварии (200) установлен в произвольном положении вне аккумуляторного блока (400) для обнаружения удара, нанесенного транспортному средству, и выдачи распознанного сигнала о столкновении в блок управления транспортным средством ECU (300). То есть, когда столкновения не происходит, блок определения столкновения (200) может подавать импульсы для высоких и низких сигналов в блок управления транспортным средством ECU (300) с заданным периодом, и когда столкновение обнаружено, высокий уровень колебаний может непрерывно подаваться в блок управления транспортным средством ECU (300) с заданным периодом.
Блок управления транспортным средством ECU (300) принимает аварийный сигнал, поступающий от блока определения столкновения (200), и передает принятый аварийный сигнал по линии аварийных сигналов, подключенной к батарейному блоку (400).
Приемник аварийных сигналов (421) батарейного блока (400) принимает аварийный сигнал, передаваемый по линии аварийных сигналов, отдельно подключенной к блоку управления транспортного средства (300), и передает принятый аварийный сигнал устройству управления (422).
Устройство управления (422) определяет, сталкивается ли транспортное средство, используя аварийный сигнал, подаваемый через приемник авариных сигнала (421). То есть, когда верхние и нижние пределы пульсовых колебаний аварийных сигналов принимаются с нормальным периодом от приемника авариных сигналов (421), устройством управления (422) определяется, что столкновения транспортного средства не происходит.
Как описано выше, когда определено, что столкновения транспортного средства не происходит, устройство управления (422) выполняет команду в соответствии с последовательностью движения при нормальном управлении работающей батареей.
Между тем контроллер (422) в BMS (420) определяет, что столкновение транспортного средства происходит, когда не принимаются верхние и нижние пределы пульсовых колебаний аварийных сигналов датчика столкновения в заданный период через приемник аварийных сигналов (421), и сохраняется высокий предел колебаний непрерывно в течение заданного периода.
Таким образом, когда определено, что произошло столкновение транспортного средства, устройство управления (422) в BMS (420) предоставляет информацию о возникновении столкновения в блок передачи сети CAN (423), а блок передачи сети CAN (423) передает информацию о возникновении столкновения, полученную от устройства управления (422), в блок управления транспортным средством ECU (300).
Соответственно, блок управления транспортного средства ECU (300) может отображать предупреждающее сообщение и сообщение о прекращении работы аккумулятора в соответствии с столкновением транспортного средства на панели дисплея транспортного средства, используя информацию о столкновении транспортного средства, полученную по линии сети CAN.
Между тем, когда определено, что происходит столкновение транспортного средства, устройство управления (422) в BMS (420) отключает переключатель коннектора аккумулятора (410), чтобы предотвратить повреждение аккумулятора и повторную аварию.
Как описано выше, приведение в действие батареи (400) прекращается в соответствии с отключением коннектора батареи (410).
Ниже приведен пошаговый принцип работы, т.е. реализация заявленного способа в соответствии с конфигурацией описанного выше заявленного устройства защиты аккумулятора BMS с использованием аварийного сигнала.
Сначала во время выполнения команды в соответствии с последовательностью движения, то есть во время работы батареи, блок обнаружения аварии (200), установленный снаружи аккумуляторного блока (400), обнаруживает столкновение, полученное транспортным средством.
Обнаруженный аварийный сигнал подается на блок управления транспортного средства ECU (300). То есть, когда столкновения не происходит, блок определения столкновения (200) может подавать импульсы для высоких и низких сигналов в блок управления транспортным средством (300) с заданным периодом, и когда обнаруживается столкновение из-за удара, высокий предел колебаний аварийного сигнала может непрерывно подаваться в блок управления транспортным средством (300).
Блок управления транспортным средством (300) принимает аварийный сигнал, поступающий от блока определения столкновения (200), и передает принятый аварийный сигнал в приемник аварийных сигналов (421) BMS (420) батарейного блока (400) по линии аварийных сигналов, подключенной к батарейному блоку (400).
Приемник аварийных сигналов (421) батарейного блока (400) принимает аварийный сигнал, передаваемый по отдельной линии аварийных сигналов от блока управления транспортного средства (300), и передает принятый аварийный сигнал устройству управления (422).
Устройство управления (422) определяет, происходит ли столкновение, используя аварийный сигнал, подаваемый через приемник авариных сигналов (421). То есть, когда принимаются верхние и нижние пределы пульсовых колебаний аварийных сигналов датчика столкновения в течение заданного времени от приемника аварийных сигналов (421), определяется, что столкновения транспортного средства не происходит.
Как описано выше, когда определено, что столкновения транспортного средства не происходит, устройство управления (422) выполняет команду в соответствии с последовательностью движения при нормальном управлении работающей батареей.
Между тем, устройство управления (422) в BMS (420) определяет, что столкновение транспортного средства происходит, когда принимается высокий предел колебаний аварийных сигналов непрерывно через приемник аварийных сигналов (421) при нормальном цикле высоких и низких колебаний.
Таким образом, когда определено, что произошло столкновение транспортного средства, контроллер (422) в BMS (420) предоставляет данные о возникновении столкновения в блок передачи сети CAN (423), а блок сети CAN (423) передает информацию о возникновении столкновения, полученную от устройства управления (422), в блок управления транспортным средством (300).
Соответственно, блок управления транспортного средства (300) может отображать предупреждающее сообщение и сообщение о прекращении работы аккумулятора в соответствии с столкновением транспортного средства на панели дисплея транспортного средства, используя информацию о столкновении транспортного средства, полученную по линии связи CAN.
Между тем, когда определено, что происходит столкновение транспортного средства, устройство управления (422) в BMS (420) отключает переключатель коннектора (410) аккумулятора, чтобы предотвратить повреждение аккумулятора, вторичную аварию и тому подобное.
Как описано выше, приведение в действие батареи прекращается в соответствии с отключением коннектора батареи (410).
Реализация заявленного способа защиты батареи BMS с использованием сигнала столкновения с применением заявленного устройства защиты батареи BMS с использованием аварийного сигнала проиллюстрирована на Фиг. 2.
На Фиг. 2 представлена блок-схема иллюстрирует заявленный способ и принцип работы устройства защиты аккумулятора BMS использованием аварийного сигнала.
Согласно Фиг. 2 в ходе реализации заявляемого способа защиты аккумулятора BMS сначала определяется, выполняется ли команда в соответствии с последовательностью операций, приводится ли в действие батарея (S201).
В результате определения, когда батарея приводится в движение, то есть блок обнаружения аварии (200), установленный снаружи батарейного блока (400) (Фиг. 1), обнаруживает столкновение, примененное к транспортному средству (S202).
Обнаруженный аварийный сигнал подается на блок управления транспортного средства (300), то есть на ECU транспортного средства (S203). Таким образом, если столкновения не происходит, блок определения столкновения (200) подает аварийные сигналы в виде колебаний в блок управления транспортным средством (300) с заданным периодом, и когда обнаруживается столкновение, высокий предел колебаний аварийного сигнала непрерывно аварийный сигнал подается в блок управления транспортным средством (300) (Фиг. 1).
Блок управления транспортным средством (300) принимает аварийный сигнал, поступающий от блока определения столкновения (200), и передает принятый аварийный сигнал в BMS (420) батарейного блока (400) по линии аварийных сигналов, подключенной к батарейному блоку (400) (S204).
BMS (420) принимает аварийный сигнал, подаваемый по отдельной линии аварийных сигналов от блока управления (300) транспортного средства, т.е. ECU (S205), и определяет, столкнулось ли транспортное средство, используя принятый аварийный сигнал (S206). То есть, когда высокие и низкие колебания аварийных сигналов, передаваемые от ECU (S205), принимаются в нормальном цикле, определяется, что столкновения транспортного средства не происходит.
Как описано выше, когда определено, что столкновения транспортного средства не происходит, устройство управления (422) выполняет команду в соответствии с последовательностью движения при нормальном управлении работающей батареей.
Между тем, когда определено, что столкновение произошло в результате определения возникновения столкновения на этапе (S206), BMS (420) передает данные о возникновении столкновения в ECU (S205) через линию сети CAN (S207). Соответственно, ECU (S205) может отображать предупреждающее сообщение и сообщение о прекращении работы аккумулятора в соответствии с столкновением транспортного средства на панели дисплея транспортного средства, используя данные о столкновении транспортного средства, полученную от BMS (420) через линию сети CAN.
На данном этапе распознавание возникновения столкновения транспортного средства определяется, что столкновение транспортного средства происходит, когда не принимаются колебания сигналов от ECU в заданный период, и принимается высокий предел колебаний аварийного сигнала непрерывно в течение заданного периода.
Между тем, на этапе (S206), когда определено, что произошло столкновение транспортного средства, переключатель коннектора (410) батареи в батарейном блоке (400) переключается в выключенный режим (S208), чтобы предотвратить повреждение батареи, вторичную аварию и тому подобное.
Соответственно, привод батареи прекращается в соответствии с выключением переключателя коннектора батареи (410) (S209). То есть, когда происходит столкновение транспортного средства, питание аккумулятора прекращается (S209) в соответствии с аварийным сигналом, так что становится невозможным управлять транспортным средством, тем самым снижая риск последующих аварий.
В результате BMS (420) в батарейном блоке (400) в соответствии с настоящим изобретением реализует функцию аварийной остановки при столкновении с использованием аварийного сигнала, тем самым поддерживая более безопасную работу аккумулятора для обеспечения эффективного и безопасного вождения электромобиля.
В связи с тем, что все компоненты, составляющие вариант осуществления заявленного изобретения, описанный выше, описаны как работающие в одной комбинации, настоящее изобретение не обязательно ограничивается этим вариантом осуществления. То есть, в рамках объекта настоящего изобретения все компоненты могут быть избирательно объединены с одним или несколькими из них для работы. Кроме того, все компоненты могут быть реализованы в одном независимом аппаратном обеспечении, но некоторые или все компоненты могут быть выборочно объединены в виде компьютерной программы с некоторыми или всеми функциями, объединенными в одном или нескольких аппаратных средствах. Кроме того, такая компьютерная программа сохраняется на читаемых компьютером носителях записи, таких как USB-носитель, CD-диск, флэш-память и т. п., и считывается и выполняется компьютером, тем самым реализуя вариант осуществления настоящего изобретения. Носитель записи компьютерной программы может включать в себя носитель магнитной записи, носитель оптической записи, носитель несущей волны и тому подобное.
Как описано выше, хотя устройство защиты аккумулятора и способ его работы в соответствии с вариантом осуществления настоящего изобретения описаны, объем настоящего изобретения не ограничивается конкретными вариантами осуществления, и различные альтернативы, модификации и изменения могут быть выполнены в пределах диапазона, который очевиден специалистам в данной области.
Соответственно, варианты осуществления и прилагаемые изображения настоящего изобретения не ограничены технической идеей настоящего изобретения, но предназначены для описания технической идеи настоящего изобретения, и объем технической идеи настоящего изобретения не ограничивается вариантами осуществления и прилагаемыми изображениями. Объем правовой охраны и сущность данного изобретения должны быть истолкованы формулой изобретения, и все технические идеи в пределах эквивалентного ее объема должны быть истолкованы как включенные в область этого изобретения.
Группа изобретений относится к вариантам устройства защиты аккумуляторной батареи и способам его работы. Устройство защиты содержит: батарейный блок, блок определения столкновений, блок управления транспортного средства, коннектор, систему управления батареей, блок передачи сети CAN. Блок управления транспортного средства передает батарейному блоку аварийный сигнал. Аварийный сигнал к батарейному блоку подается по отдельной линии аварийных сигналов. Данные об аварии к блоку управления транспортного средства передаются по линии CAN. Коннектор переключает привод аккумуляторной батареи в соответствии с сигналом. Система управления батареей подает управляющий сигнал на коннектор батарейного блока в соответствии с изменением аварийного сигнала. Система управления батареей включает приемник аварийных сигналов. Приемник аварийных сигналов передает аварийный сигнал в коннектор батарейного блока. Устройство управления обнаруживает столкновение, когда принимается высокий предел колебания импульсов аварийного сигнала и подает сигнал прекращения движения аккумуляторной батареи в коннектор батарейного блока. Когда высокие и низкие пределы колебаний принимаются в заданный период, устройство управления определяет, что столкновения транспортного средства не происходит. Достигается повышение безопасности батареи при столкновении. 4 н.п. ф-лы, 2 ил.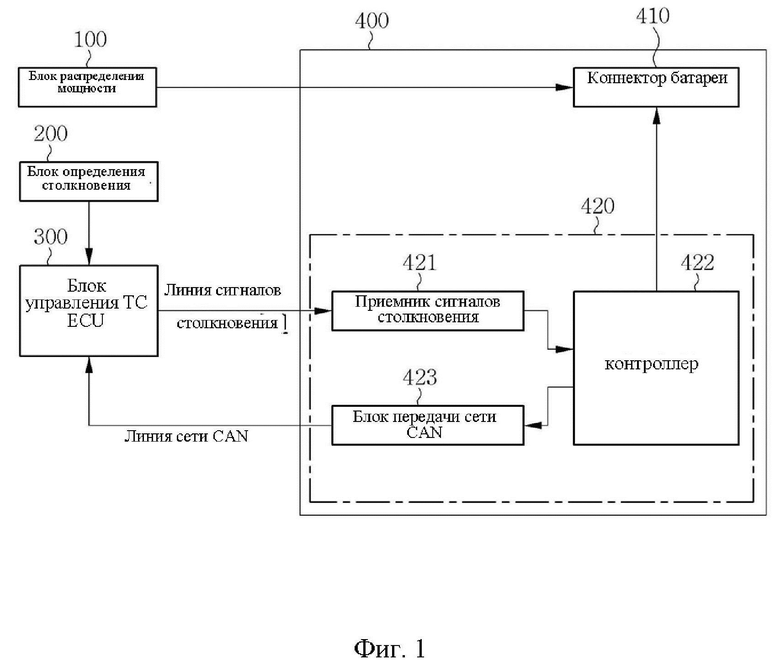
1. Устройство защиты аккумуляторной батареи, содержащее батарейный блок; блок определения столкновения, который определяет, произошла ли авария; блок управления транспортного средства, который передает батарейному блоку аварийный сигнал, обнаруженный блоком определения аварии, принимает данные об аварии, полученные от батарейного блока, и отображает сообщение о сбое на панели дисплея блока управления транспортного средства; причем аварийный сигнал, подаваемый от блока управления транспортного средства к батарейному блоку, подается по отдельной линии аварийных сигналов, а данные об аварии транспортного средства, передаваемые от батарейного блока к блоку управления транспортного средства, передаются по линии сети CAN; а также дополнительно содержит коннектор, который переключает привод аккумуляторной батареи в соответствии с предоставленным сигналом управления приводом батареи; содержит систему управления батареей (BMS), которая подает управляющий сигнал для управления приводом аккумуляторной батареи на коннектор батарейного блока в соответствии с изменением аварийного сигнала транспортного средства, принимаемого от блока управления транспортного средства по линии аварийных сигналов; при этом система управления батареей (BMS) включает приемник аварийных сигналов, который принимает аварийный сигнал через блок управления транспортного средства, и передает принятый аварийный сигнал в коннектор батарейного блока; устройство управления, которое обнаруживает высокий-низкий периоды колебаний для импульсов аварийного сигнала, подаваемого через приемник аварийных сигналов в устройство управления, которое определяет, что происходит столкновение с транспортным средством, когда принимается высокий предел колебания импульсов аварийного сигнала непрерывно в течение заданного периода, и подает управляющий сигнал для прекращения движения аккумуляторной батареи в коннектор батарейного блока, а также дополнительно содержит блок передачи сети CAN, который генерирует информацию о столкновении транспортного средства и предоставляет данные о сбое блоку управления транспортным средством, находящемуся вне батарейного блока, в случае, когда устройство управления определяет, что происходит столкновение транспортного средства; причем в случае, когда высокие и низкие пределы колебаний для импульсов аварийного сигнала транспортного средства, подаваемого через приемник аварийных сигналов, принимаются в заданный период, устройство управления определяет, что столкновения транспортного средства не происходит и выполняет команду в соответствии с последовательностью движения без остановки аккумуляторной батареи.
2. Устройство защиты аккумуляторной батареи, включающее:
линию аварийных сигналов, подключенную к блоку управления транспортного средства (ECU), для приема аварийных сигналов от блока управления транспортного средства (ECU);
линию связи CAN, подключенную к блоку управления транспортного средства (ECU) для передачи данных о столкновении транспортного средства в блок управления транспортного средства (ECU);
коннектор батареи, который переключает привод батареи в соответствии с предоставленным сигналом управления приводом батареи;
систему управления батареей (BMS), которая обеспечивает управляющий сигнал для управления приводом аккумуляторной батареи в соответствии с изменением аварийного сигнала транспортного средства, принимаемого от блока управления транспортного средства (ECU) через линию аварийных сигналов, и предоставляет данные о столкновении транспортного средства в блок управления транспортного средства (ECU) через линию связи CAN;
при этом система управления батареей (BMS) представляет собой блок приема аварийных сигналов, который принимает аварийный сигнал транспортного средства через блок управления транспортного средства (ECU) и передает принятый аварийный сигнал, и дополнительно включает устройство управления, которое обнаруживает высокие-низкие пределы колебаний импульсов аварийного сигнала, подаваемого через приемник аварийных сигналов, определяет, что происходит столкновение транспортного средства в случае, когда передается высокий предел импульсов аварийного сигнала непрерывно в течение заданного периода, и подает управляющий сигнал для прекращения движения аккумулятора в коннектор батарейного блока, а также дополнительно включает в себя блок передачи связи CAN, который генерирует информацию о столкновении транспортного средства и предоставляет такую информацию блоку управления транспортным средством (ECU), находящемуся вне батарейного блока, через линию сети CAN в случае, когда устройство управления определяет, что происходит столкновение транспортным средством, при этом в случае, когда высокие или низкие пределы колебаний импульсов аварийного сигнала транспортного средства, подаваемого из приемника аварийных сигналов в заданный период в устройство управления, которое определяет, что столкновение транспортного средства не происходит, а команда в соответствии с последовательностью движения выполняется без остановки аккумуляторной батареи.
3. Способ работы устройства защиты аккумуляторной батареи, характеризующийся следующим:
блок определения столкновения, установленный снаружи аккумуляторной батареи, определяет столкновение транспортного средства и подает аварийный сигнал в блок управления транспортного средства (ECU);
далее в блоке управления транспортного средства (ECU) выполняется этап подачи обнаруженного аварийного сигнала на батарейный блок;
затем в батарейном блоке аварийный сигнал, поступающий от блока управления транспортного средства (ECU), используется для определения того, произошло ли столкновение с транспортным средством, для последующего предоставления данных о столкновении в блок управления транспортного средства (ECU) и остановки работы аккумуляторной батареи, когда было определено, что произошло столкновение транспортного средства;
затем производится этап приема информации о возникновении аварии, предоставляемой от батарейного блока, и отображение сообщения о возникновении столкновения на панели дисплея в блоке управления транспортного средства (ECU);
при этом аварийный сигнал, подаваемый от блока управления транспортного средства (EBU) к батарейному блоку, подается по отдельной линии аварийных сигналов, а информация о столкновении транспортного средства, передаваемая от батарейного блока к блоку управления транспортного средства (EBU), предоставляется по линии сети CAN;
предоставление управляющего сигнала коннектору аккумуляторной батареи для управления приводом аккумулятора в соответствии с изменением аварийного сигнала транспортного средства, полученного от блока управления транспортного средства (ECU), осуществляется через линию аварийных сигналов;
управление приводом батареи осуществляется путем переключения коннектора батарейного блока в соответствии с сигналом управления приводом батареи при обнаружении высокого-низкого пределов колебаний импульсов аварийного сигнала, принятого от блока управления транспортного средства (EBU) посредством линии аварийных сигналов следующим образом:
при определении того, что столкновение транспортного средства происходит в случае, когда принимается высокий предел импульсов аварийного сигнала непрерывно в течение заданного периода, осуществляется подача управляющего сигнала для прекращения движения аккумуляторной батареи на коннектор батарейного блока и генерация информации о столкновении транспортного средства и предоставления информации о столкновении транспортного средства в блок управления транспортного средства (ECU), находящийся вне аккумуляторной батареи, через линию сети CAN, когда определено, что произошло столкновение транспортного средства;
а в случае, когда высокие и низкие пределы колебаний импульсов аварийного сигнала транспортного средства, подаваемого из блока управления транспортного средства (ECU), принимаются в заданный период устройством управления, которое определяет, что столкновение транспортного средства не происходит, и переключатель коннектора батарейного блока поддерживается во включенном состоянии, и выполняется команда в соответствии с последовательностью движения.
4. Способ работы устройства защиты аккумуляторной батареи, характеризующийся следующим:
в BMS батарейного блока аварийный сигнал транспортного средства, обнаруженный блоком определения столкновения, установленным снаружи батарейного блока, принимается от блока управления транспортного средства (EBU) по линии аварийных сигналов;
в BMS выполняется этап определения того, произошло ли столкновение транспортного средства, с использованием аварийного сигнала, поступающего от блока управления транспортного средства (ECU) по линии аварийных сигналов;
BMS предоставляет блоку управления транспортного средства (EBU) данные о столкновении через линию сети CAN и подает управляющий сигнал на коннектор батарейного блока, чтобы остановить работу аккумуляторной батареи;
этап остановки работы аккумуляторной батареи согласно сигналам управления, полученных от коннектора батарейного блока;
при этом этап, определяющий, произошло ли столкновение транспортного средства, заключается в том, что в случае, когда обнаруживаются высокий-низкий пределы колебаний импульсов аварийного сигнала, полученного от блока управления транспортным средством (ECU) через линию аварийных сигналов, в течение заданного периода, определяется, что происходит столкновение транспортного средства; а в случае, когда определено, что столкновение транспортного средства не происходит, переключатель коннектора батарейного блока поддерживается во включенном состоянии и непрерывно выполняется команда в соответствии с последовательностью движения.
| KR 20160071849 A, 22.06.2016 | |||
| KR 20160107166 A, 13.09.2016 | |||
| KR 20140063170 A, 27.05.2014 | |||
| US 2015051771 A1, 19.02.2015 | |||
| JP 2014230473 A, 08.12.2014. |
