Область техники
Изобретение относится к многоразовым космическим летательным аппаратам (МКЛА), совершающим полеты в космосе как вокруг Земли, так и в межпланетном пространстве.
Предшествующий уровень техники
Известны МКЛА, в частности космическая ракета-носитель Falcon9 американской компании SpaceX первая ступень которой (возможно и вторая) может использоваться несколько раз для запуска космических кораблей, а также космолета Roton С - 9 с турбовинтовой посадочной системой, автором которой является американский инженер Гэри Хадсон. Основными недостатком вышеуказанных МКЛА является невозможность из-за высоких температур и скоростей истечения струй из сопел двигателей, совершать взлет и посадку без использования специального наземного оборудования и стартовых площадок, хотя для космолета Roton предусмотрена посадка за счет турбовинтовой системы.
Кроме того, из-за больших продольных габаритов ступеней при вертикальной посадке возможно их опрокидывание, что снижает надежность МКЛА.
Также существенными недостатками указанных многоразовых пилотируемых ракет-носителей, например типа Falcon, предназначенных для доставки людей, например на планету Марс, является то, что не решены проблемы долговременного пребывания человека в космическом пространстве, в том числе проблема невесомости.
Указанные недостатки, в частности обеспечение достаточно надежной посадки, долговременного пребывания в космосе за счет создания искусственного тяготения решены в заявке на выдачу российского патента на изобретение пилотируемого космического летательного аппарата (ПКЛА) №2020142840 от 23.12.2020 г.
Основным недостатком ПКЛА является следующее.
Его конструкция, состоящая из модулей, собирается в космосе на околоземной орбите. При этом доставка каждого модуля на орбиту с помощью ракет-носителей сопровождается огромными затратами, связанными с большим расходом топлива, использования большого количества ракет-носителей, потерей ее ступеней. Кроме того, для запуска ракет-носителей необходимо использование дорогостоящего наземного оборудования: стартовых столов, мачт обслуживания и др.
Эти и другие вышеуказанные недостатки устранены в конструкции предложенного МКЛА.
Раскрытие изобретения
Задача настоящего изобретения заключается в разработке конструкции многоступенчатого МКЛА с улучшенными эксплуатационными качествами, где в качестве ступеней используется совокупность параллельно расположенных модулей в количестве девяти штук (для примера) восемь из которых расположены равномерно по кругу и которые связаны с одним (девятым) модулем в центре круга (центральным модулем) по типу ПКЛА.
В задачу изобретения входит также обеспечение режима эксплуатации МКЛА, включая многоразовую посадку и взлет ступеней с неподготовленных поверхностей Земли и других планет, используя для полета в атмосфере воздушные газотурбинные двигатели.
Кроме того, в задачу изобретения входит разработка конструкций ступеней МКЛА, способных автономно собираться (стыковаться) между собой как на Земле (так и на другой планете), так и в космическом полете. При этом сборка (изготовление) модулей ступеней осуществляется в земных условиях.
Для решения этих задач МКЛА, содержащий две, три и более ступеней продольного расположения, каждая из которых представляет собой совокупность взаимосвязанных между собой модулей, жидкостные или твердотопливные ракетные двигатели, установленные на модулях ступеней, универсальные посадочные устройства, стыковочные устройства согласно изобретению:
- выполнен из двух, трех и более универсальных ступеней, состоящих из совокупности параллельно расположенных по кругу модулей, соединенных радиальными связями с центральным модулем ступени;
- ступени МКЛА собираются между собой за счет стыковочных устройств, расположенных на торцах центральных модулей;
- часть модулей ступеней, расположенных по кругу, оснащены подъемными винтовыми силовыми установками (ПВСУ) со складывающимися в полете малонагруженными винтами;
- в качестве ПВСУ могут быть применены турбовинтовые двигатели (ТВД) или подъемные винты с реактивным приводом от газогенератора на перекиси водорода (парогазогенератора) по типу турбовинтовой системы космолета Roton - 9;
- модули первой ступени, кроме ПВСУ, имеют воздушные газотурбинные двигатели типа турбовентиляторных (ТВЛД);
- радиальными связями в каждой ступени являются аэродинамические поверхности с рулями высоты и направления, а также удобообтекаемые профили.
Такое устройство МКЛА позволяет значительно упростить его конструкцию за счет применения универсальных ступеней.
При этом ступени с параллельно расположенными взаимосвязанными модулями, которые позволяют уменьшить высоту конструкции МКЛА в 3…4 раза по сравнению с ракетами продольного расположения ступеней и во столько же раз увеличить его ширину (диаметр) и, как следствие, обеспечить устойчивость на взлете и посадке.
Кроме того, в связи с применением ПВСУ исключается необходимость в использовании наземного оборудования для запуска космических ракет-носителей (стартовых столов, мачт обслуживания и др.), т.к. запуск МКЛА можно осуществлять с любой естественной площадки, что позволит в несколько раз снизить затраты на запуск ракет-носителей, в том числе многоразовых.
Также исключается потеря ступеней, так как каждая из них может за счет применения ТВЛД и ПВСУ надежно и безопасно возвращена на Землю.
Применение авиационных воздушных газотурбинных двигателей позволит в несколько раз снизить стоимость пуска, а весовую отдачу по полезной нагрузке увеличить до 20% (вместо 3…5% у применяющихся в настоящее время ракет-носителей).
Применение аэродинамических поверхностей, установленных на каждой ступени, позволит получить дополнительную подъемную силу при взлете и управляемый полет в условиях атмосферы.
Конструкция МКЛА позволяет создавать околоземные орбитальные станции с большими объемами жизненного пространства с обеспечением искусственного тяготения и радиационной защиты.
И, наконец, МКЛА в пилотируемом варианте может обеспечить надежную и безопасную доставку людей на другие планеты, в частности на Марс, с последующим их освоением человеком для обитания.
По имеющимся у заявителя сведениям, совокупность существенных признаков заявляемого МКЛА не известны из уровня техники, что позволяет сделать вывод о соответствии изобретения критерию «новизна».
По мнению заявителя, сущность заявляемого изобретения не следует главным образом из известного уровня техники, так как из него не выявляется вышеуказанное влияние на достигаемый технический результат -новые свойства объекта - совокупность признаков, которые отличаются от известных космических ЛА (ПКЛА, космолет Roton) заявляемый МКЛА, что позволяет сделать вывод о его соответствии критерию «изобретательский уровень».
Совокупность существенных признаков, характеризующих сущность изобретения, может быть многократно использована в производстве МКЛА, конструкция которого выполнена из нескольких ступеней, модули которых, кроме ракетных двигателей, оснащены дополнительно авиационными воздушными двухконтурными газотурбинными двигателями типа ТВЛД и малонагруженными воздушными винтами ПВСУ с получением технического результата, заключающегося в упрощении конструкции МКЛА, надежной и безопасной доставки человека на другие планеты, значительного сокращения эксплуатационных затрат МКЛА по сравнению с существующими космическими ЛА, что позволяет сделать вывод о соответствии МКЛА критерию «промышленная применяемость».
Изобретение поясняется чертежами, на которых изображены:
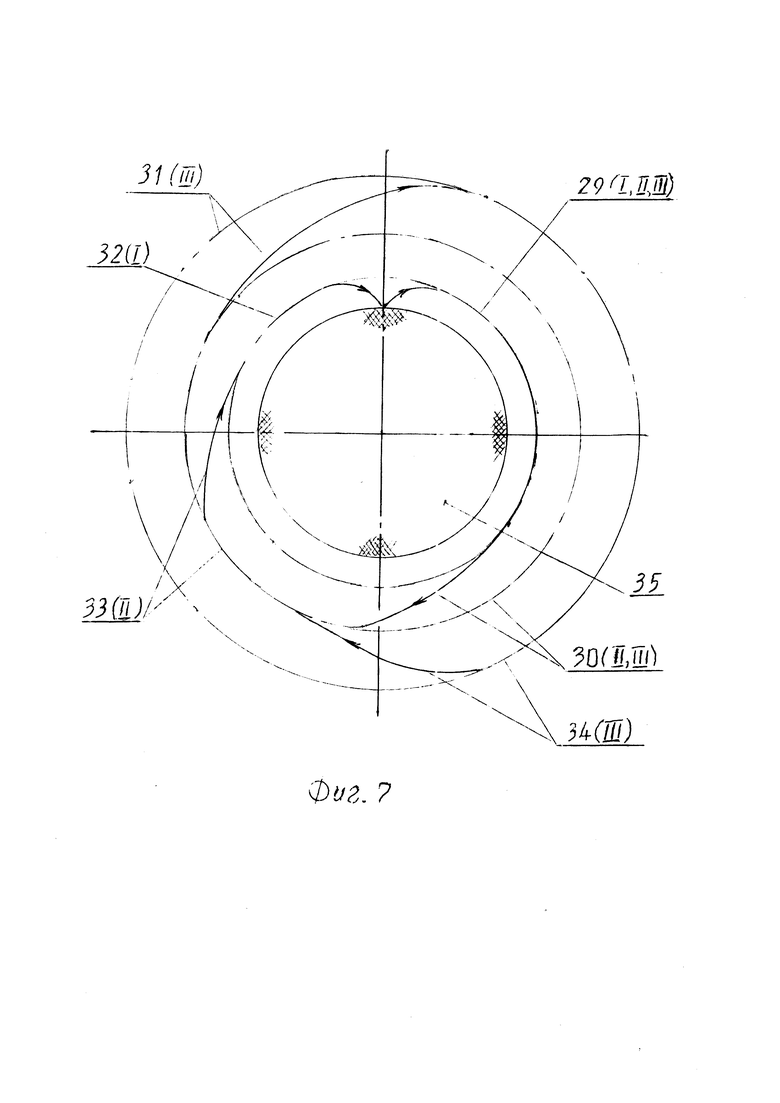
На фиг. 1 - МКЛА, вид сбоку в сеч. А-А;
На фиг. 2 - МКЛА, вид в плане;
На фиг. 3 - модули ступени I МКЛА:
а) модуль силовой, оснащенный ПВСУ и ТВЛД;
б) модуль силовой, оснащенный РДТТ и ТВЛД;
в) модуль центральный, оснащенный РДТТ;
На фиг. 4 - модули МКЛА ступени II МКЛА:
а) модуль силовой, оснащенный ПВСУ и РДТТ;
б) модуль силовой, оснащенный ПВСУ и РДТТ;
в) центральный модуль, оснащенный РДТТ;
На фиг. 5 - модуль ступени III МКЛА, преобразованный в тороид:
На фиг. 6 - модуль ступени III МКЛА силовой, оснащенный РДТТ и ПВСУ с реактивным приводом винта, характерный также для ПВСУ I и II ступеней;
На фиг. 7 - взлетно-посадочные траектории полета МКЛА и его ступеней.
Рассматривается в качестве примера трехступенчатый МКЛА, конфигурация ступеней которого идентичны друг другу с тем отличием, что ступень I кроме ПВСУ и ракетных двигателей, как и остальные ступени, оснащены воздушными газотурбинными двухконтурными двигателями типа ТВЛД.
МКЛА содержит ступени I, II и III, каждая из которых состоит из восьми модулей, включая силовые модули 1 и бытовые модули 2 с их параллельным расположением по кругу, центрального многофункционального модуля 3, радиальных связей 4 в виде удобообтекаемых профилей, соединяющих каждый круговой модуль с центральным модулем с помощью стыковочных устройств 5, которые еще дополнительно на ступени III обеспечивают поворот модулей из вертикального в горизонтальное положение до соприкосновения модулей друг с другом с образованием тороида (фиг. 5), двенадцати ПВСУ 6 со складывающимися в полете винтами 7, расположенными в верхней части силовых модулей 1, поворот лопастей которых из вертикального в горизонтальное и наоборот осуществляется за счет механизмов 8, ракетных двигателей твердотопливных (РДТТ), включая разгонные 9 и тормозные 10, восьми ТВЛД 11 с топливными баками 12, установленными снизу силовых модулей 1 ступени I, установленных на всех ступенях аэродинамических поверхностей 13 для создания подъемной силы с рулями высоты 14 и аэродинамических поверхностей 15 с рулями направления 16, стыковочных устройств 17 для соединения ступеней между собой и доступа через дверной люк 18 выдвижной телескопической трубы 19 из нижней ступени I в верхнюю ступень III при посадке через трубу - лаз 20, установленной в каждом центральном модуле 3, посадочных устройств 21 ступени I и посадочных устройств 22 ступеней II и III, которые установлены на каждой ступени снизу силовых модулей 1, оснащенных ПВСУ, съемных в полете обтекателей 23 силовых модулей 1 и съемных или откидных обтекателей 24 центральных модулей 3.
На фиг. 6 (для примера) показан силовой модуль ступени III (характерный также для ступеней I и II) с подъемным винтом 7 ПВСУ с реактивным приводом, в состав которого входят втулка 25, сопла 26, газогенератор 27, топливный бак 28 с перекисью водорода.
На фиг. 7 показаны взлетно-посадочные траектории полета МКЛА в целом и его ступеней.
Траектории полета 29 и 30 являются взлетными, 31 - орбитальной околоземной траекторией полета ступени III, а траектории 32, 33 и 34 являются посадочными для ступеней I, II, и III раздельно на Землю 35.
Эксплуатация МКЛА с многоразовым использованием как ступеней, так и их модулей производится следующим образом.
В полностью готовый к полету МКЛА, заправленный топливом для обеспечения работы ПВСУ и ТВЛД и снаряженный РДТТ, через дверной люк 18 осуществляется посадка командного экипажа и других космонавтов, которые поочередно через трубу - лаз 20 с помощью лифта (не показано) доставляются в кабину ступени III. Это осуществляется, если МКЛА пилотируемый.
При этом МКЛА опирается на четыре посадочные устройства 21 ступени I.
Взлет МКЛА осуществляется вертикально с любой площадки за счет тяги всех подъемных винтов 7 ПВСУ 6 и тяги всех ТВЛД 11. Перед взлетом вначале включаются ПВСУ, лопасти винтов которых из сложенного положения устанавливаются в раскрытое рабочее положение за счет механизмов 8. Затем с использованием тяги сопел 26, в которые поступает газ под давлением из газогенератора 28, работающим на перекиси водорода, находящимся в топливном баке 27, производится раскрутка винтов 7 с образованием необходимой подъемной тяги. После этого включаются ТВЛД с образованием также подъемной тяги. Поступающий воздушный поток от ПВСУ смешивается с газовоздушным потоком от ТВЛД, уменьшая скоростное и температурное воздействие на взлетную площадку до приемлемого уровня.
На высоте 100…200 метров МКЛА из вертикального положения переходит в горизонтальное с набором высоты по самолетному, при этом к вертикальной составляющей тяги ТВЛД и винтов 7 ПВСУ добавляется подъемная сила от аэродинамических поверхностей 13 ступеней I, II III. При этом управление МКЛА по высоте и направлению осуществляется соответственно за счет рулей 14 и 16.
По достижении скорости полета 150…200 км/час ПВСУ отключаются и лопасти винтов складываются вдоль силовых модулей 1 на всех ступенях.
На следующем этапе на высоте 10…15 км ТВЛД отключаются с одновременным включением разгонных РДТТ 9 ступени I, хотя они могут быть включены раньше при полете в атмосфере. При этом также может быть включена часть разгонных РДТТ ступени II. По достижении высоты полета 100 км происходит отстыковка ступени I. Дальнейший полет осуществляется за счет тяги разгонных РДТТ ступени II с выводом ее вместе со ступенью III на околоземную орбиту, где происходит отстыковка ступени II и полет ступени III.
После отстыковки ступеней I и II происходит их управляемый спуск к земной поверхности (фиг. 7).
Ступень I после отстыковки включает тормозные РДТТ 10 и на скорости 1000…1500 км/час и высоте 10…15 км РДТТ отключаются и включаются ТВЛД 11 со снижением высоты и скорости с направлением посадки в заданную точку. По достижении скорости полета 150…200 км/час включаются ПВСУ с одновременным отключением ТВЛД и с высоты 50…100 м происходит вертикальная посадка ступени МКЛА за счет тяги винтов ПВСУ на заданную площадку с использованием посадочных устройств 21 (фиг. 3).
Ступень II после отстыковки также включает тормозные РДТТ 10 и совершает управляемый спуск, не допуская перегрева конструкции в плотных слоях атмосферы. Также по достижению скорости полета 150…200 км/час и с высоты 50…100 м производится посадка ступени МКЛА за счет тяги винтов ПВСУ с использованием посадочных опор 22 (фиг. 4).
После возвращения на Землю ступени I и II заправляются топливом, также они оснащаются новыми РДТТ и стыкуются с новой ступенью III. После сборки всех ступеней, проверки всех систем МКЛА имеет готовность к повторному запуску.
Стыковка ступеней МКЛА в земных условиях с использованием стыковочных устройств 17 может производиться как за счет грузоподъемных средств, так и за счет использования подъемных винтов 7 ПВСУ 6.
Находясь на околоземной орбите или совершая длительные полеты на другие планеты ступень III за счет поворота модулей вокруг осей радиальных связей и стыковки их между собой за счет стыковочных устройств 5 преобразуются в тороидальную конструкцию - тороид, который затем приводится во вращение вокруг центрального модуля с целью создания необходимого искусственного тяготении (аналогично ПКЛА), если МКЛА находится в пилотируемом режиме полета.
Таким образом, ступень III является космическим кораблем и может выступить в качестве орбитальной околоземной космической станции или межпланетным космическим кораблем и также может самостоятельно совершать посадку на Землю, а также посадку и взлет на других планетах солнечной системы. Из восьми модулей тороида четыре штуки являются силовыми, которые оснащены подъемными ПВСУ и РДД, и четыре штуки предназначены для размещения космонавтов, оборудования для обеспечения жизнедеятельности и др. В центральном модуле ступени III в верхней части размещается вращающаяся капсула с командным экипажем (аналогично ПКЛА), а в нижней части - РДТТ.
Предложенный МКЛА, ступени которого выполнены из параллельно расположенных в большей своей части универсальных модулей, взаимосвязанных между собой и оснащенных кроме ракетных двигателей дополнительно авиационными воздушными газотурбинными двигателями и подъемными винтами, может совершать многоразовые взлеты и посадки как в земных, так и во внеземных условиях без использования дорогостоящего стартового оборудования, также обеспечивать надежно и безопасно длительные полеты как на околоземной орбите, так и в космическом межпланетном пространстве, что позволяет сделать вывод о «промышленной применимости» МКЛА.
Изобретение относится к многоразовым космическим летательным аппаратам (МКЛА), совершающим полеты в космосе как вокруг Земли, так и в межпланетном пространстве. МКЛА содержит три ступени, каждая из которых состоит из восьми модулей, двенадцать подъемных винтовых силовых установок (ПВСУ) со складывающимися в полете винтами, расположенными в верхней части силовых модулей, поворот лопастей которых из вертикального в горизонтальное положение и наоборот осуществляется за счет механизмов, ракетные двигатели твердотопливные (РДТТ), включая разгонные и тормозные, восемь турбовентиляторных двигателей (ТВЛД) с топливными баками, установленными снизу силовых модулей ступени I, установленные на всех ступенях аэродинамические поверхности для создания подъемной силы с рулями высоты и аэродинамические поверхности с рулями направления, стыковочные устройства для соединения ступеней между собой и доступа через дверной люк выдвижной телескопической трубы из нижней ступени I в верхнюю ступень III при посадке через трубу-лаз, установленный в каждом центральном модуле, посадочные устройства ступени I и посадочные устройства ступеней II и III, которые установлены на каждой ступени снизу силовых модулей, оснащенных ПВСУ. 7 ил.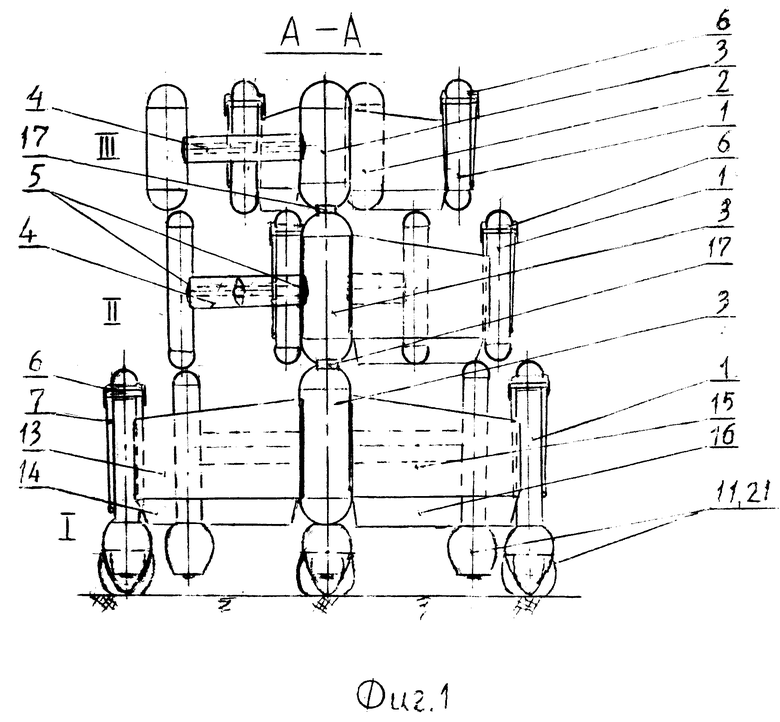
Многоразовый космический летательный аппарат (МКЛА), содержащий две, три и более ступени продольного расположения, каждая из которых представляет собой совокупность взаимосвязанных между собой модулей, жидкостные или твердотопливные ракетные двигатели, установленные на модулях ступеней, универсальные посадочные и стыковочные устройства, отличающийся тем, что МКЛА содержит три ступени, каждая из которых состоит из восьми модулей, включая силовые модули и бытовые модули с их параллельным расположением по кругу, центральный многофункциональный модуль, радиальные связи в виде удобообтекаемых профилей, соединяющих каждый круговой модуль с центральным модулем с помощью стыковочных устройств, обеспечивающих дополнительно на третьей ступени III поворот модулей из вертикального в горизонтальное положение до соприкосновения модулей друг с другом с образованием тороида, двенадцать подъемных винтовых силовых установок (ПВСУ) со складывающимися в полете винтами, расположенными в верхней части силовых модулей, поворот лопастей которых из вертикального в горизонтальное положение и наоборот осуществляется за счет механизмов, ракетные двигатели твердотопливные (РДТТ), включая разгонные и тормозные, восемь турбовентиляторных двигателей (ТВЛД) с топливными баками, установленными снизу силовых модулей ступени I, установленные на всех ступенях аэродинамические поверхности для создания подъемной силы с рулями высоты и аэродинамические поверхности с рулями направления, стыковочные устройства для соединения ступеней между собой и доступа через дверной люк выдвижной телескопической трубы из нижней ступени I в верхнюю ступень III при посадке через трубу-лаз, установленный в каждом центральном модуле, посадочные устройства ступени I и посадочные устройства ступеней II и III, которые установлены на каждой ступени снизу силовых модулей, оснащенных ПВСУ, съемные в полете обтекатели силовых модулей и съемные или откидные обтекатели центральных модулей.
| МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ (ВАРИАНТЫ) | 2017 |
|
RU2684839C1 |
| Ступенчатая космическая ракета | 2020 |
|
RU2749908C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 4384692 A1, 24.05.1983 | |||
| US 10661918 B2, 26.05.2020. | |||

