ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области резервуаров, расположенных на плавучей конструкции, например, на судне, например, герметичных и теплоизоляционных резервуаров с мембранами. В частности, настоящее изобретение относится к области герметичных и теплоизоляционных резервуаров для хранения и/или транспортировки сжиженного газа при низкой температуре, например, резервуаров для транспортировки сжиженного углеводородного газа (СУГ), имеющего, например, температуру от -50°C до 0°C, или для транспортировки сжиженного природного газа (СПГ) при температуре приблизительно -162°C при атмосферном давлении. Такие резервуары могут быть предназначены для транспортировки сжиженного газа или для приёма сжиженного газа с целью использования в качестве топлива для приведения в движение плавучей конструкции.
В одном варианте осуществления сжиженный газ представляет собой СПГ, т.е. смесь с высоким содержанием метана, хранящуюся при температуре приблизительно -162°C при атмосферном давлении. Также предусмотрены другие сжиженные газы, в частности, этан, пропан, бутан или этилен. Сжиженные газы также могут храниться под давлением, например, при относительном давлении от 2 до 20 бар и, в частности, при относительном давлении, близком к 2 бар. Резервуар может быть изготовлен в соответствии с различными технологиями, в частности, в виде встроенного мембранного резервуара или самонесущего резервуара.
УРОВЕНЬ ТЕХНИКИ
Во время хранения и/или транспортировки жидкость, содержащаяся в резервуаре, подвергается различным перемещениям. В частности, перемещения судна в море, например, под действием климатических условий, например, состояния моря или ветра, вызывает колебание жидкости в резервуаре. Волнение жидкости, обычно называемое «плесканием», приводит к воздействию напряжения на стенки резервуара, что может нарушить целостность резервуара. Однако целостность резервуара крайне важна в случае резервуара для хранения СПГ из-за воспламеняемой или взрывоопасной природы транспортируемой жидкости и риска возникновения холодных мест на стальном корпусе плавучей конструкции.
Для снижения рисков повреждения резервуаров, связанных с перемещениями жидкости в резервуарах, суда для транспортировки СПГ, как правило, совершают рейс с пустыми или, наоборот, с полными резервуарами. Фактически, в пустом резервуаре вес остаточной жидкости, содержащейся в резервуаре, ограничен и создаёт лишь незначительные действия сил на стенки резервуара. В полном резервуаре ограничено остаточное пространство резервуара, не занятое жидкостью, что соответственно ограничивает свободу перемещения жидкости в резервуаре и, следовательно, силу воздействия на стенки резервуара. В связи с этим суда для транспортировки СПГ, как правило, должны выходить в рейс с резервуарами, заполненными менее чем на 10% от их вместимости или, наоборот, более чем на 70% от их вместимости, для ограничения рисков повреждения стенок резервуаров, связанных с воздействием перемещений жидкости в резервуарах.
В уровне техники известен документ JP H107190, в котором описан способ управления уровнями заполнения множества резервуаров судна, транспортирующего криогенную жидкость. В соответствии с этим документом при обнаружении, что в одном резервуаре перемещение жидкости, которую он содержит, приближается к стадии резонанса, что может привести к отрицательным последствиям в виде повреждения резервуара («плескание»), выполняют передачу жидкости из одного резервуара в другой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Состояние заполнения резервуаров представляет собой идеальное теоретическое состояние заполнения, которого не всегда можно достичь. В частности, в случае экстренной отправки судна во время загрузки или выгрузки груза оно может выйти в море с частично заполненными резервуарами. Фактически, операции загрузки и разгрузки жидкости, содержащейся в резервуарах, являются довольно длительными, поэтому в случае тревожного предупреждения, требующего экстренной отправки, необходимо досрочно остановить операции. Тревожные предупреждения могут быть связаны с множеством причин, таких как, например, стихийное бедствие, например, цунами или землетрясение, или предупреждение, связанное с повреждением портовых сооружений.
Идея, лежащая в основе некоторых вариантов осуществления изобретения, заключается в ограничении рисков, связанных с перемещениями жидкости, транспортируемой судном, содержащим множество частично заполненных резервуаров, по морю. Идея, лежащая в основе некоторых вариантов осуществления изобретения, заключается в передаче жидкости между резервуарами, имеющими уровни заполнения, связанные с риском повреждения, для достижения уровней заполнения в упомянутых резервуарах с более низким риском повреждения. Идея, лежащая в основе некоторых вариантов осуществления изобретения, заключается в выполнении одного или более сценариев передачи для перехода из начального состояния заполнения резервуаров в целевое состояние заполнения упомянутых резервуаров. Идея, лежащая в основе некоторых вариантов осуществления изобретения, заключается в передаче жидкости между резервуарами в соответствии со сценарием передачи, имеющим удовлетворительный уровень безопасности в ходе выполнения упомянутого сценария передачи. С этой целью идея, лежащая в основе некоторых вариантов осуществления изобретения, заключается в вычислении вероятности повреждения резервуаров в ходе выполнения одного или более сценариев передачи.
В соответствии с одним вариантом осуществления изобретение предлагает способ управления уровнями заполнения множества резервуаров, расположенных на судне, при этом упомянутые резервуары соединены с возможностью передачи жидкости между упомянутыми резервуарами, причём способ содержит этапы, на которых:
обеспечивают начальное состояние, определяющее начальные уровни заполнения резервуаров,
определяют по меньшей мере одно целевое состояние, определяющее конечные уровни заполнения упомянутых резервуаров,
определяют сценарий передачи жидкости, причём сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение периода передачи для перехода из начального состояния в целевое состояние резервуаров,
вычисляют вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение периода передачи, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения сценария передачи,
генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами, в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
Способ в соответствии с изобретением определяет по меньшей мере один сценарий передачи для передачи жидкости (сжиженного газа), предпочтительно множество сценариев передачи для передачи жидкости между резервуарами, чтобы оператор или команда могли выбрать сценарий по желанию. В этом случае все из множества сценариев, предложенных оператору, направлены на снижение риска повреждения резервуаров; однако эти сценарии могут отличаться друг от друга временем, необходимым для их выполнения, и конечными уровнями заполнения каждого из резервуаров.
Благодаря этим признакам, риск повреждения резервуаров оценивают для сценария передачи с учётом последовательных уровней заполнения резервуаров во время передачи. Таким образом, благодаря этим признакам, риск повреждения резервуаров вычисляют не только для целевого состояния, которое должно быть достигнуто, но и для периода передачи жидкости.
Таким образом, при нахождении судна для транспортировки сжиженного газа в доке с по меньшей мере частично заполненными резервуарами изобретение позволяет команде или оператору максимально быстро вернуть безопасную ситуацию, например, когда угроза шторма требует отхода судна от причала, или, когда судну необходимо быстро отчалить.
В соответствии с некоторыми вариантами осуществления способ управления может содержать один или более следующих признаков.
В соответствии с одним вариантом осуществления вероятность повреждения резервуаров в целевом состоянии ниже, чем вероятность повреждения резервуаров в начальном состоянии.
Благодаря этим признакам, можно обеспечить безопасность судна, резервуары которого частично заполнены, путём передачи жидкости, содержащейся в упомянутых резервуарах, между ними для достижения более безопасного состояния заполнения резервуаров.
В соответствии с одним вариантом осуществления способ управления дополнительно содержит этап, на котором, передают жидкость между резервуарами в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
В соответствии с одним вариантом осуществления способ управления дополнительно содержит этап, на котором обеспечивают параметр пропускной способности при передаче, определяющий пропускную способность при передаче между резервуарами, причём сценарий передачи определяют в зависимости от упомянутого параметра, определяющего пропускную способность при передаче между резервуарами.
В соответствии с одним вариантом осуществления параметр пропускной способности при передаче содержит параметр, определяющий количество насосов для одного, нескольких или каждого из резервуаров. В соответствии с одним вариантом осуществления параметр пропускной способности при передаче содержит параметр, определяющий расход насоса или насосов резервуаров. В соответствии с одним вариантом осуществления параметр пропускной способности при передаче содержит параметр, определяющий объем резервуаров. В соответствии с одним вариантом осуществления параметр, определяющий пропускную способность при передаче между резервуарами, содержит один или более параметров, определяющих диаметр соединительных трубопроводов между резервуарами.
В соответствии с одним вариантом осуществления способ управления дополнительно содержит этап, на котором обеспечивают по меньшей мере один параметр окружающей среды, определяющий данные об окружающей среде судна, причём вероятность повреждения резервуаров вычисляют в зависимости от упомянутых по меньшей мере одного параметра окружающей среды.
В соответствии с одним вариантом осуществления параметр или параметры окружающей среды содержат один или более следующих параметров: высоту ветровых волн, высоту зыби, период ветровых волн, период зыби, направление ветровых волн, направление зыби, силу ветра, направление ветра, силу течения, направление течение, относительное направление ветра, зыби, течения, ветровых волн относительно судна.
Предпочтительно параметр или параметры окружающей среды содержат высоту волн или высоту зыби, и ещё более предпочтительно высота волн и высота зыби представляют собой как минимум два параметра окружающей среды, учитываемых в способе в соответствии с изобретением.
В соответствии с одним вариантом осуществления вероятность повреждения резервуаров вычисляют в зависимости от по меньшей мере одного параметра, выбранного из группы параметров, содержащей перемещения судна, уровни воздействия жидкости на стенки резервуаров, статистические характеристики воздействия перемещений жидкости, прочность резервуаров в зависимости от положения в упомянутых резервуарах, время нахождения на разных уровнях заполнения, скорость испарения газа, вызванного передачей жидкости, состояние загрузки конструкции судна.
Предпочтительно вычисление вероятности повреждения учитывает по меньшей мере статистические характеристики воздействия перемещений жидкости или время нахождения на разных уровнях заполнения, и ещё более предпочтительно статистические характеристики воздействия перемещений жидкости и время нахождения на разных уровнях заполнения представляют собой как минимум два параметра, учитываемых для вычисления повреждения.
В соответствии с одним вариантом осуществления уровень заполнения резервуара определяется высотой жидкости в упомянутом резервуаре. В соответствии с другим вариантом осуществления уровень заполнения резервуара определяется объёмом жидкости, содержащейся в упомянутом резервуаре.
В соответствии с одним вариантом осуществления способ управления дополнительно содержит этап, на котором определяют параметр в режиме реального времени и учитывают упомянутый параметр для определения сценария передачи.
В соответствии с одним вариантом осуществления способ управления дополнительно содержит этап, на котором определяют параметр в режиме реального времени и учитывают упомянутый параметр для определения вычисления вероятности повреждения резервуаров.
В соответствии с одним вариантом осуществления судно содержит один или более датчиков для обеспечения параметра сценария передачи в режиме реального времени, в частности, начальных уровней заполнения, вместимости резервуаров, расхода насосов и т.д.
В соответствии с одним вариантом осуществления судно содержит один или более датчиков для обеспечения параметра вычисления вероятности повреждения резервуаров в режиме реального времени, в частности, перемещений судна, параметров окружающей среды и т.д.
В соответствии с одним вариантом осуществления судно содержит базу данных, содержащую данные, соответствующие одному или более параметрам сценария передачи.
В соответствии с одним вариантом осуществления судно содержит базу данных, содержащую данные, соответствующие одному или более параметрам вычисления вероятности повреждения резервуаров.
В соответствии с одним вариантом осуществления критерий приемлемости представляет собой критерий, связанный с риском повреждения резервуаров в ходе выполнения сценария передачи.
В соответствии с одним вариантом осуществления вероятность повреждения резервуаров вычисляют по следующей формуле:

где tk_n - номер резервуара n,
SC - условия плавания в зависимости от уровня fl_n заполнения резервуара tk_n,
Probtk_n - плотность вероятности возникновения давления Pressurf на внутренней поверхности резервуара tk_n, превышающего прочность Ressurf упомянутой внутренней поверхности резервуара tk_n, в зависимости от условий SC(fl_n) плавания,
surf - внутренняя поверхность, на которую воздействует жидкость, и
tope - продолжительность операции перехода из начального состояния в целевое состояние.
В соответствии с одним вариантом осуществления условия SC плавания также зависят от по меньшей мере одного из следующих параметров:
угол падения между морскими волнами и судном,
период морских волн,
значительная высота морских волн,
перемещения судна,
скорость движения судна вперёд.
Необходимо отметить, что морские волны можно разделить на ветровые волны, зыбь и поперечную зыбь. В связи с этим морские волны могут быть определены с использованием нескольких компонентов.
В соответствии с одним вариантом осуществления плотность Probtk_n(Pressurf>Ressurf,tk_n,SC(fl_n) вероятности задана.
В соответствии с одним вариантом осуществления плотность или плотности вероятности повреждения резервуара заданы на основе испытаний перемещений жидкости, проведенных в лаборатории. В соответствии с одним вариантом осуществления законы вероятности повреждения резервуара заданы посредством сбора данных на судах в море.
В соответствии с одним вариантом осуществления способ дополнительно содержит этап, на котором непрерывно отслеживают фактические последовательные состояния резервуаров в течение периода передачи и в ответ на обнаружение несоответствия между фактическими последовательными состояниями резервуаров и прогнозируемыми последовательными состояниями резервуаров, определенными сценарием передачи, повторяют вышеописанный способ.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых:
- определяют множество различных сценариев передачи, причём каждый сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение соответствующего периода передачи для перехода из начального состояния в целевое состояние,
- вычисляют для каждого сценария передачи соответствующую вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение соответствующего периода передачи, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения упомянутого сценария передачи,
- выбирают один сценарий из множества сценариев передачи, и
- генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами в соответствии с выбранным сценарием передачи, если соответствующая вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
В соответствии с одним вариантом осуществления способ дополнительно содержит этапы, на которых:
- определяют множество целевых состояний, причём каждое целевое состояние определяет конечные уровни заполнения резервуаров,
- определяют множество различных сценариев передачи, причём каждый сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение соответствующего периода передачи для перехода из начального состояния в одно целевое состояние из множества целевых состояний,
- вычисляют для каждого сценария передачи соответствующую вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение соответствующего периода передачи, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе осуществления упомянутого сценария передачи,
- выбирают один сценарий из множества сценариев передачи, и
- генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами в соответствии с выбранным сценарием передачи, если соответствующая вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
В соответствии с одним вариантом осуществления один или более сценариев могут быть определены для одного, нескольких или каждого из целевых состояний.
В соответствии с одним вариантом осуществления сценарий передачи выбирают в зависимости от вероятности повреждения резервуаров, например, для минимизации этой вероятности.
В соответствии с одним вариантом осуществления сценарий выбирают в зависимости от критерия приемлемости.
Сценарий может быть выбран в зависимости от различных критериев приемлемости. В соответствии с одним вариантом осуществления сценарий выбирают в зависимости от времени, в течение которого существует риск повреждения резервуаров, связанный с перемещениями жидкости в резервуарах. В соответствии с другим вариантом осуществления сценарий выбирают в зависимости от времени передачи сценариев. В соответствии с одним вариантом осуществления сценарий выбирают в зависимости от объёма газа, доступного в резервуарах в конце сценария передачи для питания двигательной установки судна, например, газового двигателя.
В соответствии с одним вариантом осуществления некоторые параметры, такие как, например, уровень перемещения жидкости в резервуарах, перемещения судна и/или погода, определяют в режиме реального времени, например, с помощью бортовых датчиков.
В соответствии с одним вариантом осуществления некоторые параметры, такие как, например, уровень перемещения жидкости в резервуарах, перемещения судна и/или погода, определяют путём прогнозирования.
В соответствии с одним вариантом осуществления жидкость представляет собой сжиженный газ, например, сжиженный природный газ.
В соответствии с одним вариантом осуществления изобретение также предлагает компьютерную систему управления уровнями заполнения резервуаров, содержащую средства для:
- обеспечения начального состояния, определяющего начальные уровни заполнения резервуаров,
- определения целевого состояния, определяющего конечные уровни заполнения упомянутых резервуаров,
- определения сценария передачи жидкости, причём сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение периода передачи для перехода из начального состояния в целевое состояние резервуаров,
- вычисления вероятности повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение периода передачи, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения сценария передачи,
- генерирования последовательности инструкций, предназначенных для передачи жидкости между резервуарами, в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
В соответствии с одним вариантом осуществления система управления дополнительно содержит средство сбора данных, например, один или более датчиков или одно или более средств ввода данных оператором. В соответствии с одним вариантом осуществления система управления дополнительно содержит средство отображения данных. В соответствии с одним вариантом осуществления средства системы управления для выполнения этапов, описанных выше, представляют собой или содержат по меньшей мере один процессор и по меньшей мере одну память, содержащую интегрированный программный модуль.
Способ или система управления для управления уровнями заполнения резервуаров могут быть реализованы на прибрежной или глубоководной плавучей конструкции, в частности, на судне для транспортировки СПГ, на плавучей установке для регазификации и хранения газа (FSRU), на плавучей установке для добычи, хранения и отгрузки нефти (FPSO), на барже или т.п.
В соответствии с одним вариантом осуществления изобретение также предлагает судно для транспортировки холодного жидкого продукта, содержащее двойной корпус, множество резервуаров и вышеописанную систему управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение станет более понятным, и другие задачи, детали, признаки и преимущества станут более очевидными при прочтении следующего далее описания нескольких конкретных вариантов осуществления изобретения, приведенных исключительно в качестве иллюстративных и неограничивающих примеров со ссылкой на приложенные чертежи.
Фиг. 1 представляет схематический вид судна в продольном разрезе, содержащего множество резервуаров в начальном состоянии заполнения.
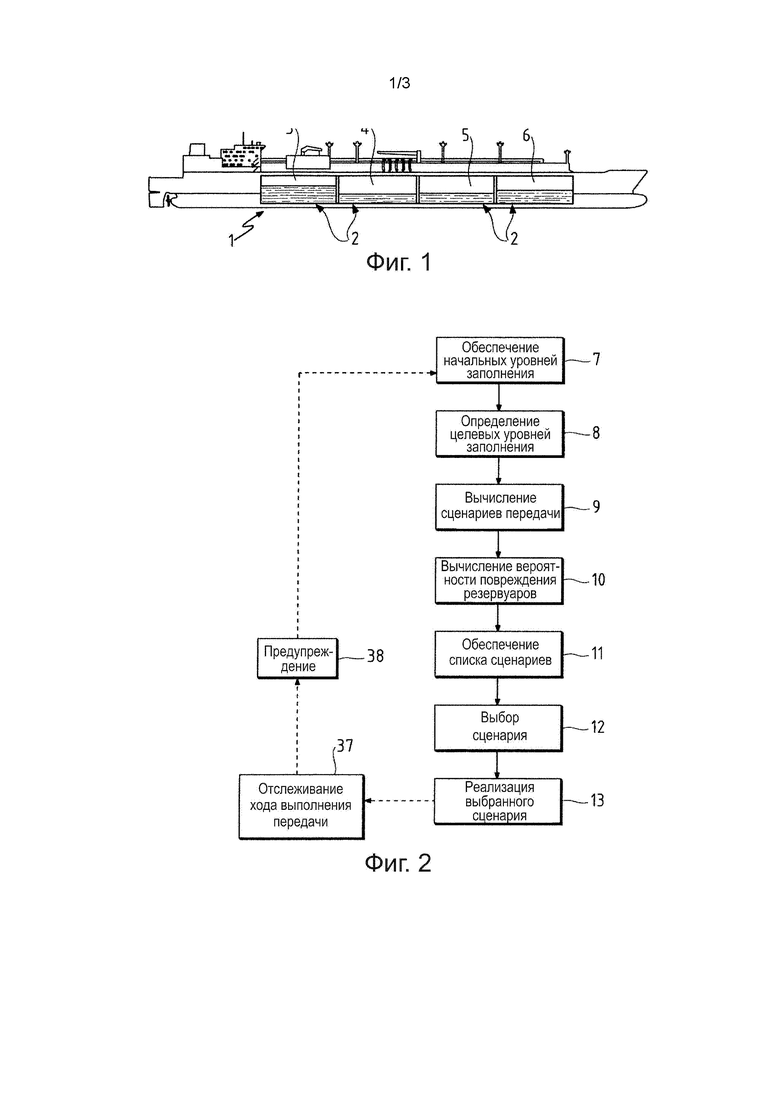
Фиг. 2 представляет схему, иллюстрирующую различные этапы способа управления уровнями заполнения резервуаров для перехода из начального состояния заполнения, показанного на фиг. 1, в целевое состояние заполнения, показанное на фиг. 3.
Фиг. 3 представляет схематический вид в судна продольном разрезе, показанного на фиг. 1, с резервуарами в целевом состоянии заполнения.
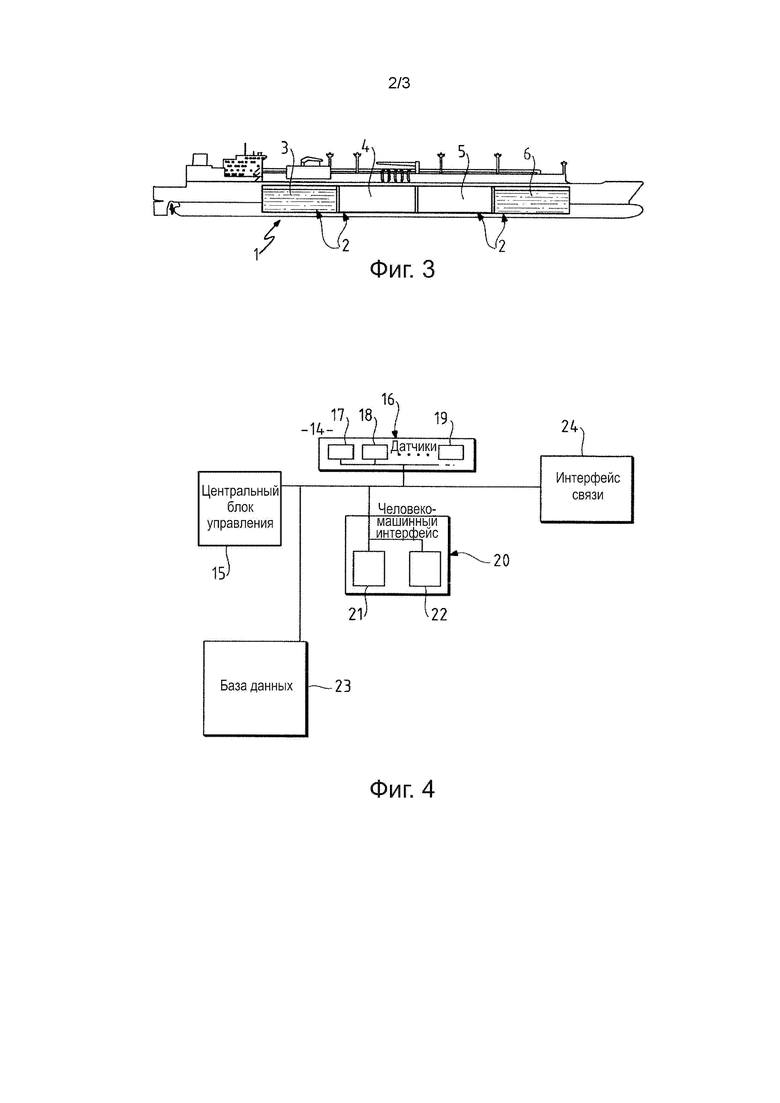
Фиг. 4 представляет схематический вид системы управления уровнями заполнения резервуаров судна, показанного на фиг. 1.
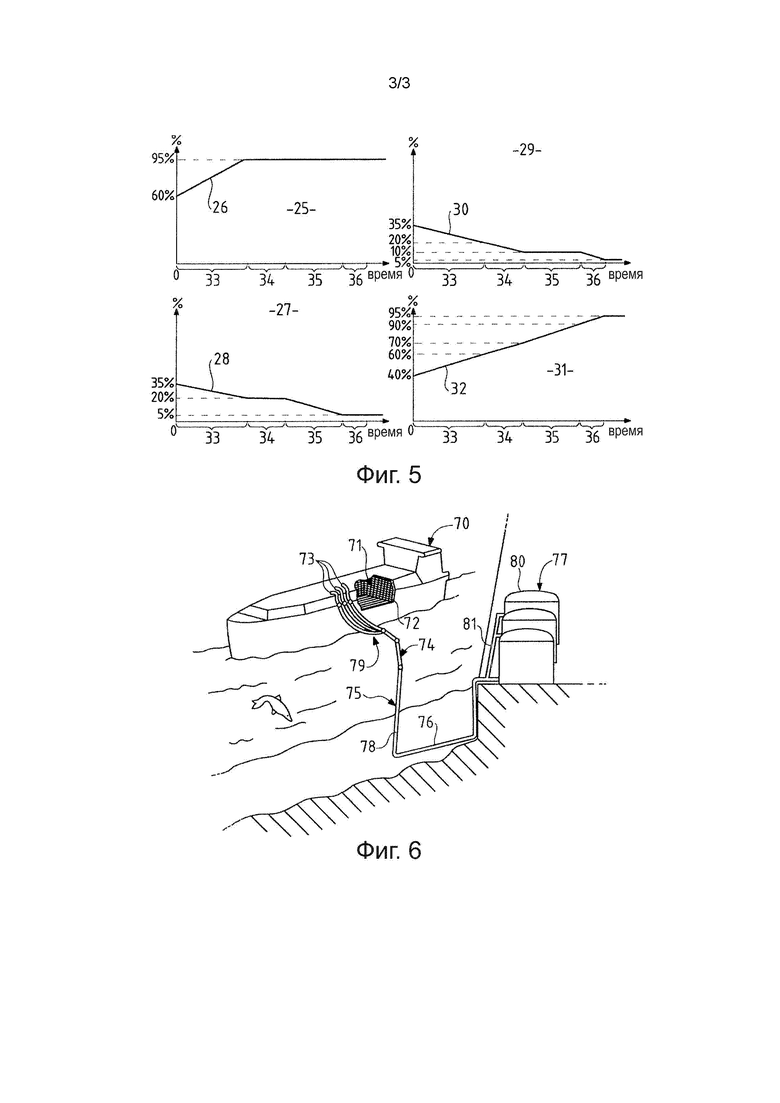
Фиг. 5 представляет множество графиков, иллюстрирующих передачу жидкости с течением времени для перехода из начального состояния заполнения, показанного на фиг. 1, в целевое состояние заполнения, показанное на фиг. 2.
Фиг. 6 представляет схематический вид с вырезом резервуара судна для транспортировки СПГ, содержащего систему управления уровнями заполнения резервуаров, и терминала для загрузки/разгрузки этого резервуара.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фигуры описаны ниже в отношении судна 1, содержащего двойной корпус, образующий несущую конструкцию, в которой расположено множество герметичных и теплоизоляционных резервуаров. Несущая конструкция имеет, например, многогранную геометрию, например, призматическую форму.
Герметичные и теплоизоляционные резервуары предназначены, например, для транспортировки сжиженного газа. Сжиженный газ хранится и транспортируется в резервуарах при низкой температуре, что требует теплоизоляции стенок резервуара для поддержания сжиженного газа при такой температуре. Следовательно, особенно важно сохранить целостность стенок резервуара как для сохранения герметичности резервуара и предотвращения утечек сжиженного газа из резервуаров, так и для предотвращения ухудшения изоляционных характеристик резервуара для поддержания газа в сжиженном виде.
Герметичные и теплоизоляционные резервуары также содержат изоляционный барьер, прикрепленный к двойному корпусу судна и удерживающий по меньшей мере одну герметичную мембрану. Например, резервуары могут быть изготовлены в соответствии с технологией Mark III®, описанной, например, в документе FR2691520, технологией NO96®, описанной, например, в документе FR2877638, или другими технологиями, описанными, например, в документе WO14057221.
Фиг. 1 иллюстрирует судно 1, содержащее четыре герметичных и теплоизоляционных резервуара 2. На судне 1 резервуары 2 соединены друг с другом системой обработки груза (не показана), которая может включать в себя множество компонентов, например, насосы, клапаны и трубопроводы для обеспечения передачи жидкости из одного из резервуаров 2 в другой резервуар 2.
Четыре резервуара 2 имеют начальное состояние заполнения, показанное на фиг. 1. В начальном состоянии резервуары частично заполнены. Первый резервуар 3 заполнен приблизительно на 60% его вместимости. Второй резервуар 4 заполнен приблизительно на 35% его вместимости. Третий резервуар 5 заполнен приблизительно на 35% его вместимости. Четвёртый резервуар 6 заполнен приблизительно на 40% его вместимости.
Частичное заполнение резервуаров 3, 4, 5, 6 может создавать значительные риски повреждения упомянутых резервуаров 3, 4, 5, 6 при плавании судна 1 в море. Фактически, в море судно 1 подвергается множеству перемещений, связанных с условиями плавания. Перемещения судна 1 передаются жидкости, содержащейся в резервуарах 3, 4, 5, 6, которая, следовательно, может перемещаться в резервуарах 3, 4, 5, 6. Перемещения жидкости в резервуарах 3, 4, 5, 6 приводят к воздействию на стенки резервуаров 3, 4, 5, 6, что может повреждать стенки резервуаров 3, 4, 5, 6. Однако важно сохранять целостность стенок резервуаров 3, 4, 5, 6 для обеспечения герметичного уплотнения и изоляционных характеристик резервуаров 3, 4, 5, 6.
Для предотвращения повреждения резервуаров 3, 4, 5, 6 судно содержит систему управления уровнями заполнения, один вариант осуществления которой проиллюстрирован на фиг. 4, и способ работы которой проиллюстрирован на фиг. 2.
Со ссылкой на фиг. 2 система управление уровнями заполнения резервуаров, далее называемая системой управления, прежде всего должна знать начальное состояние заполнения резервуаров 3, 4, 5, 6. С этой целью на первом этапе 7 в систему управления передают начальные уровни заполнения резервуаров 3, 4, 5, 6. Начальные уровни заполнения могут быть переданы оператором вручную через интерфейс сбора данных системы управления или могут быть получены автоматически с помощью любых подходящих средств, например, с помощью датчиков обнаружения уровней заполнения резервуаров 3, 4, 5, 6 (смотри фиг. 4). Уровни заполнения, например, определены как процент от высоты жидкости в резервуаре 3, 4, 5, 6.
На втором этапе 8 система управления определяет целевое состояние заполнения резервуаров 3, 4, 5, 6. В целевом состоянии заполнения жидкость, транспортируемая судном 1, распределена между резервуарами 3, 4, 5, 6 для ограничения рисков, связанных с перемещениями жидкости в резервуарах 3, 4, 5, 6. В частности, система управления определяет целевое состояние заполнения, в котором вся жидкость, транспортируемая судном, распределена между разными резервуарами для ограничения рисков, связанных с перемещениями жидкости в резервуарах. Как правило, система управления определяет целевое состояние заполнения, в котором жидкость, транспортируемая судном, распределена между резервуарами 3, 4, 5, 6 таким образом, что резервуары заполнены более чем на 70% или, наоборот, заполнены менее чем на 10%.
Фиг. 3 иллюстрирует судно, показанное на фиг. 1, с резервуарами 3, 4, 5, 6 в целевом состоянии заполнения, что позволяет ограничить риски, связанные с перемещениями жидкости в упомянутых резервуарах 3, 4, 5, 6. Таким образом, на фиг. 3 первый резервуар 3 заполнен на 95%, второй резервуар 4 и третий резервуар 5 заполнены на 5%, и четвёртый резервуар 6 заполнен на 95%.
Таким образом, пространство, не занятое жидкостью, содержащейся в резервуарах 3, 6, уменьшается. Уменьшенное остаточное пространство ограничивает перемещения упомянутой жидкости в упомянутых резервуарах 3, 6 и, следовательно, воздействия, связанные с упомянутыми перемещениями упомянутой жидкости. В связи с этим первый резервуар 3 и четвёртый резервуар 6 имеют ограниченный риск повреждения, связанный с перемещениями жидкости.
С другой стороны, второй резервуар 4 и третий резервуар 5 имеют ограниченный риск повреждения, связанный с перемещениями жидкости, за счет того, что вес жидкости, содержащейся в упомянутых втором и третьем резервуарах 4, 6, недостаточен для оказания значительного воздействия на стенки упомянутых резервуаров 4, 5.
Затем система управления вычисляет (этап 9) множество сценариев передачи для перехода из начального состояния заполнения в целевое состояние заполнения.
Сценарии передачи вычисляют на основе начальных уровней заполнения в резервуарах 3, 4, 5, 6 и характеристик судна 1. В частности, характеристики судна 1, учитываемые при вычислении сценариев передачи, содержат по меньшей мере один параметр из количества насосов в резервуарах 3, 4, 5, 6 мощности насосов, объёма резервуаров 3, 4, 5, 6 и диаметров трубопроводов, соединяющих резервуары 3, 4, 5, 6 друг с другом. На основе этих данных система управления вычисляет все возможности передачи между резервуарами, в результате чего создаётся список сценариев передачи между резервуарами для достижения целевых уровней заполнения из начальных уровней заполнения.
Каждый сценарий передачи определяет множество фаз передачи между резервуарами 3, 4, 5, 6. В частности, каждая фаза передачи определяет для каждого резервуара 3, 4, 5, 6 и в зависимости от пропускных способностей при передаче жидкости между разными резервуарами 3, 4, 5, 6 один или более потоков жидкости, которые должны передаваться между резервуарами 3, 4, 5, 6. Система управления определяет для каждой фазы передачи уровень заполнения в начале фазы, уровень заполнения в конце фазы и время передачи, необходимое для перехода от уровня заполнения в начале фазы к уровню заполнения в конце фазы. Последовательные фазы передачи позволяют перейти из начального состояния заполнения в целевое состояние заполнения.
Однако фазы передачи требуют передачи большого количества жидкости между резервуарами 3, 4, 5, 6. Для такой передачи может потребоваться значительное количество времени, в течение которого резервуары 3, 4, 5, 6 могут оставаться подверженными значительным рискам, связанным с перемещениями жидкости. В связи с этим после вычисления разных сценариев на этапе 9 система управления вычисляет (этап 10) для каждого сценария риски повреждения резервуаров 3, 4, 5, 6 в ходе выполнения упомянутого сценария передачи.
Другими словами, для каждого сценария передачи система управления также вычисляет вероятность повреждения резервуаров 3, 4, 5, 6 в ходе выполнения упомянутого сценария передачи.
Вероятность повреждения резервуаров 3, 4, 5, 6 вычисляют в зависимости от множества параметров. Для вычисления вероятностей повреждения резервуаров 3, 4, 5, 6 некоторые величины должны быть оценены путём статистического или физического вычисления, путём измерений, проводимых в режиме реального времени на борту или в ходе испытаний.
Параметры, учитываемые при вычислении вероятности повреждения резервуаров 3, 4, 5, 6, могут содержать параметры перемещений судна 1, параметры условий окружающей среды судна 1, конструктивные параметры судна 1 или параметры, связанные с жидкостью, содержащейся в резервуарах 3, 4, 5, 6.
Параметры перемещений судна, например, представляют собой параметры перемещений судна в соответствии с шестью степенями свободы судна (продольно-горизонтальная качка, поперечно-горизонтальная качка, вертикальная качка, крен, тангаж, рыскание), которые могут быть представлены в виде перемещения, скорости и временного или спектрального ускорения. Параметры перемещений судна также могут содержать курс судна с точки зрения направления, скорости и положения в системе GPS.
Параметры условий окружающей среды в основном связаны с погодой. Параметры условий окружающей среды содержат, например, высоту ветровых волн, высоту зыби, период ветровых волн, период зыби, направление ветровых волн, направление зыби, силу ветра, направление ветра, силу течения, направление течение, относительное направление ветра, зыби, течения, ветровых волн относительно судна.
Конструктивные параметры судна 1 содержат, например, прочность стенок резервуаров 3, 4, 5, 6 в зависимости от положения в резервуарах, прочность изоляционной системы резервуаров 3, 4, 5, 6 в зависимости от положения в резервуарах или статистические характеристики воздействия перемещений жидкости.
Параметры, связанные с жидкостью, содержащейся в резервуарах 3, 4, 5, 6, представляют собой, например, уровни (сила, давление, амплитуда, частота, площадь поверхности) воздействия жидкости на стенки резервуаров 3, 4, 5, 6, время нахождения на разных уровнях заполнения резервуаров 3, 4, 5, 6, уровень испарения сжиженного газа, вызванного передачей жидкости, состояние загрузки конструкции судна 1.
В связи с этим система управления вычисляет для каждого сценария общее время операции перехода из начального состояния заполнения в конечное состояние заполнения и риск повреждения стенок резервуаров 3, 4, 5, 6 во время упомянутой операции. Риск повреждения изоляции вычисляют по следующей формуле:
где tk_n - номер резервуара n,
SC - условия плавания в зависимости от уровня fl_n заполнения резервуара tk_n,
Probtk_n - плотность вероятности возникновения давления Pressurf на внутренней поверхности резервуара tk_n, превышающего прочность Ressurf упомянутой внутренней поверхности резервуара tk_n, в зависимости от условий SC(fl_n) плавания,
surf - внутренняя поверхность, на которую воздействует жидкость, и
tope - продолжительность операции перехода из начального состояния в целевое состояние.
Условия SC плавания также могут зависеть от по меньшей мере одного из следующих параметров:
угол падения между морскими волнами и судном,
период морских волн,
значительная высота морских волн,
перемещения судна,
скорость движения судна вперёд.
Необходимо отметить, что морские волны можно разделить на ветровые волны, зыбь и поперечную зыбь. В связи с этим морские волны могут быть определены с использованием нескольких компонентов.
Законы Probtk являются статистическими законами, такими как законы GEV, Вейбулла, Парето или Гумбеля. Один, несколько или все параметры этих законов определяют, например, на основе испытаний перемещения жидкости, проводимых в лаборатории, или бортовых измерений, проводимых в море.
Затем система предоставляет список сценариев передачи (этап 11) и различную информацию, связанную упомянутыми вычисленными сценариями передачи. Кроме того, сценарии предпочтительно ранжируют в соответствии с критерием приемлемости, например, от сценария с наибольшим риском к сценарию с наименьшим риском повреждения резервуаров 3, 4, 5, 6.
Затем выбирают (этап 12) сценарий в зависимости от критерия приемлемости.
Предпочтительно каждый сценарий представлен в виде набора сигналов управления и/или инструкций для реализации различных фаз передачи упомянутых сценария передачи. Например, сценарий может содержать последовательность инструкций, представленных в человекочитаемом формате, которые могут точно направлять оператора в течение всего периода передачи для выполнения сценария передачи.
В соответствии с одним вариантом осуществления сценарий может быть представлен в виде последовательности инструкций в машиночитаемом формате и/или последовательности сигналов управления, предназначенных для управления компонентами системы обработки груза, например, приведения в действие насосов судна, переключения клапанов и т.д., для выполнения сценария передачи.
Критерий приемлемости может принимать множество форм. Критерий приемлемости может быть задан или выбран оператором. Например, независимо от того, задан критерий приемлемости или выбран оператором, он может представлять собой риск повреждения резервуаров 3, 4, 5, 6, дальность плавания, доступную после передачи, общую продолжительность сценария передачи или другое.
Затем реализуют (этап 13) выбранный сценарий передачи, который удовлетворяет критерию приемлемости, для перехода из начального состояния заполнения в целевое состояние заполнения.
Как указано выше, различные величины, соответствующие параметрам, необходимым для вычисления сценариев (этап 9) и вычисления вероятностей повреждения (этап 10), могут быть получены или оценены с помощью статистического или физического вычисления, с помощью измерений, проводимых в режиме реального времени на борту или в ходе испытаний.
Фиг. 4 иллюстрирует пример структуры системы 14 управления. Система 14 управления содержит центральный блок 15 обработки. Центральный блок 15 обработки выполнен с возможностью выполнения различных вычислений сценариев передачи и вероятностей повреждения резервуаров 3, 4, 5, 6 (этапы 9 и 10). Центральный блок 15 обработки подключён к множеству бортовых датчиков 16 для получения различных величин, указанных выше. Таким образом, датчики 16 содержат в качестве примера и без ограничения датчик 17, обнаруживающий расход насосов, датчик 18 уровня заполнения для каждого резервуара, различные датчики 19 (акселерометр, датчик напряжения, датчик деформации, датчик звука, датчик света), позволяющие центральному блоку 15 обработки обнаруживать с помощью специального алгоритма воздействия, связанные с перемещениями жидкости в резервуарах 3, 4, 5, 6, и т.д.
Система 14 управления дополнительно содержит человеко-машинный интерфейс 20. Человеко-машинный интерфейс 20 содержит средство 21 отображения. Средство 21 отображения позволяет оператору получать различные фрагменты информации. Информация представляет собой, например, информацию о различных сценариях передачи, инструкции для реализации упомянутых сценариев передачи, величины, полученные датчиками 16, например, интенсивность перемещений жидкости в резервуарах, информацию о воздействиях, связанных с перемещениями жидкости, перемещения судна, состояние загрузки судна или метеорологическую информацию.
Человеко-машинный интерфейс 24 дополнительно содержит средство 22 сбора данных, позволяющее оператору вручную вводить величины в центральный блок 15 обработки, обычно для обеспечения центрального блока 15 обработки данными, которые не могут быть получены датчиками, поскольку судно не содержит необходимого датчика, или он повреждён. Например, в одном варианте осуществления средство сбора данных позволяет оператору вводить информацию о количестве насосов и максимальной высоте волн.
Система 14 управления содержит базу 23 данных. База 23 данных содержит, например, некоторые величины, полученные в лаборатории или во время бортовых измерений, проводимых в море.
Система 14 управления также содержит интерфейс 24 связи, позволяющий центральному блоку 15 обработки осуществлять связь с удалёнными устройствами, например, для получения метеорологических данных, данных о положении судна или других данных.
Фиг. 5 показывает графики, иллюстрирующие уровни заполнения резервуаров 3, 4, 5, 6 с течением времени. Таким образом, первый график 25 иллюстрирует уровень 26 заполнения первого резервуара 3 с течением времени. Второй график 27 иллюстрирует уровень 28 заполнения второго резервуара 4 с течением времени. Третий график 29 иллюстрирует уровень 30 заполнения третьего резервуара 5 с течением времени. Четвёртый график 31 иллюстрирует уровень 32 заполнения четвёртого резервуара 6 с течением времени.
Во время первой фазы 33 выбранного сценария передачи клапаны судна 1 выполнены с возможностью соединения первого резервуара 3 и второго резервуара 4, а также соединения третьего резервуара 5 и четвёртого резервуара 6. Кроме того, насосы резервуаров 3, 4, 5, 6 выполнены с возможностью передачи жидкости, содержащейся во втором резервуаре 4, в первый резервуар 3, и передачи жидкости, содержащейся в третьем резервуаре 5, в четвёртый резервуар 6.
Первый график 25 и второй график 27 показывают, что первый резервуар 3 принимает жидкость из второго резервуара 4 во время первой фазы 33 сценария передачи. Таким образом, первый график 25 показывает, что уровень 26 заполнения первого резервуара 3 изменяется от начального уровня заполнения, составляющего 60%, до целевого уровня заполнения, составляющего 95%, во время первой фазы 33. Подобным образом второй график 27 показывает, что второй резервуар 4 опорожняется для перехода от начального уровня заполнения, составляющего 35%, к уровню заполнения в конце первой фазы, составляющему 20%.
Во время первой фазы 33 жидкость, содержащаяся в третьем резервуаре 5, передаётся в четвёртый резервуар 6. Таким образом, уровень 30 заполнения третьего резервуара 5 изменяется от начального уровня заполнения, составляющего 35%, до уровня заполнения в конце первой фазы, составляющего 20%, а уровень 32 заполнения четвёртого резервуара 6 изменяется от 40% до уровня заполнения в конце первой фазы, составляющего 60%.
Во время второй фазы 34 сценария передачи клапаны судна 1 переключаются для соединения второго резервуара 4 с четвертым резервуаром 6. Переключение клапанов требует множества операций обслуживания и, следовательно, занимает некоторое количество времени. Во время операций обслуживания жидкость, содержащаяся в третьем резервуаре 5, продолжает передаваться в четвёртый резервуар 6, причём третий резервуар 5 имеет уровень заполнения в конце второй фазы 10%, а четвёртый резервуар 6 имеет уровень заполнения в конце второй фазы 70%.
Поскольку трубопроводы, подключённые к четвёртому резервуару 6, и насосы четвёртого резервуара 6 не позволяют поглощать поток жидкости, поступающий одновременно из третьего резервуара 5 и из второго резервуара 4, только второй резервуар 4, соединённый с четвертым резервуаром 6, опорожняется для продолжения заполнения четвёртого резервуара 6 во время третьей фазы 35 сценария передачи.
Фактически, в начале третьей фазы 35, соответствующем концу операций обслуживания для соединения второго резервуара 4 с четвертым резервуаром 6, второй резервуар 4 все ещё заполнен на 20%, в то время как третий резервуар 5 имеет уровень заполнения лишь 10%. Следовательно, предпочтительно сначала опорожнить второй резервуар 4, уровень заполнения которого представляет более высокий риск, чем уровень заполнения третьего резервуара 5. Таким образом, во время третьей фазы 35 сценария передачи только жидкость, содержащаяся во втором резервуаре 4, передаётся в четвёртый резервуар 6. Таким образом, второй резервуар 4 имеет уровень заполнения в начале третьей фазы 20% и уровень заполнения в конце третьей фазы приблизительно 5%.
По существу после опорожнения второго резервуара трубопроводы и насосы судна переключаются для передачи жидкости, содержащейся в третьем резервуаре 5, в четвёртый резервуар 6. Таким образом, в четвертой фазе 36 сценария передачи ещё не переданная жидкость, содержащаяся в третьем резервуаре 5, передаётся в четвёртый резервуар 6, так что конечный уровень заполнения третьего резервуар 5 составляет порядка 5%, а целевой уровень заполнения четвёртого резервуара 6 составляет порядка 95%.
Переключение клапанов и активация насосов, обеспечивающие передачу между резервуарами, могут быть ручными и/или автоматизированными. В случае ручных операций человеко-машинный интерфейс 20 выдаёт оператору последовательность инструкций для реализации сценария передачи. Система 14 управления учитывает при вычислениях (этапы 9 и 10) период времени, соответствующий этим операциям.
Предпочтительно система 14 управления отслеживает ход выполнения выбранного сценария (этап 37, фиг. 2) в режиме реального времени. В случае несоответствия между состоянием уровней 26, 28, 30, 32 заполнения, прогнозируемым в соответствии с выбранным сценарием, и фактическими уровнями заполнения, пользователю выдаются своевременные или заблаговременные предупреждения для предупреждения его о несоответствиях (этап 38, фиг. 2). Предупреждения также могут выдаваться оператору, если погодные условия, перемещения жидкости в наблюдаемых резервуарах, перемещения судна или т.д. изменяются по-другому, так что они могут привести к различиям в выполнении сценария.
Если между выбранным сценарием передачи и фактическим состоянием резервуаров 3, 4, 5, 6 с течением времени наблюдается несоответствие, например, из-за того, что фактический расход некоторых насосов был переоценён при вычислении сценариев передачи (этап 9), система 14 управления может перезапустить способ вычисления, показанный на фиг. 2, для применения новых сценариев передачи или предложения их оператору. Предпочтительно новое вычисление сценариев выполняют с учётом соответствующих собранных данных, которые привели к несоответствию, например, фактического наблюдаемого расхода насосов. Кроме того, в одном варианте осуществления новое вычисление сценариев выполняют путём непосредственного выбора того же целевого состояния заполнения, что и целевое состояние заполнения, определённое во время первой итерации упомянутых вычисления. Другими словами, вычисление, показанное на фиг. 2, повторяют непосредственно с этапа вычисления сценариев.
Вышеописанная технология управления уровнями заполнения резервуаров может использоваться для резервуаров различных типов, например, резервуара для СПГ на плавучей конструкции, например, на судне для транспортировки СПГ, или в других случаях.
Со ссылкой на фиг. 6 вид с вырезом судна 70 для транспортировки СПГ иллюстрирует герметичный и изолированный резервуар 71 в общем призматической формы, установленный в двойном корпусе 72 судна. Стенка резервуара 71 содержит основной герметизированный барьер, контактирующий с СПГ, содержащимся в резервуаре, вспомогательный герметизированный барьер, расположенный между основным герметизированным барьером и двойным корпусом 72 судна, и два изолирующих барьера, расположенных соответственно между основным герметизированным барьером и вспомогательным герметизированным барьером и между вспомогательным герметизированным барьером и двойным корпусом 72.
Как известно, трубопроводы 73 загрузки/разгрузки, расположенные на верхней палубе судна, могут быть соединены с помощью соответствующих соединителей с морским или портовым терминалом для передачи груза в виде СПГ в резервуар 71 или из него.
Фиг. 6 показывает пример морского терминала, содержащего станцию 75 загрузки и разгрузки, подводный трубопровод 76 и наземное сооружение 77. Станция 75 загрузки и разгрузки представляет собой прибрежное стационарное сооружение, содержащее подвижную стрелу 74 и башню 78, которая поддерживает подвижную стрелу 74. Подвижная стрела 74 содержит связку изолированных гибких труб 79, которые могут быть соединены с трубопроводами 73 загрузки/разгрузки. Ориентируемая подвижная стрела 74 адаптируется к судам для транспортировки СПГ всех размеров. Внутри башни 78 проходит соединительный трубопровод (не показан). Станция 75 загрузки и разгрузки позволяет выполнять загрузку и разгрузку судна 70 для транспортировки СПГ из наземного сооружения 77 или на него. Последнее содержит резервуары 80 для хранения сжиженного газа и соединительные трубопроводы 81, соединённые подводным трубопроводом 76 со станцией 75 загрузки и разгрузки. Подводный трубопровод 76 позволяет передавать сжиженный газ между станцией 75 загрузки и разгрузки и наземным сооружением 77 на большое расстояние, например, 5 км, что позволяет останавливать судно 70 для транспортировки СПГ на большом расстоянии от берега во время операций загрузки и разгрузки.
Для создания давления, необходимого для передачи сжиженного газа, используются насосы, установленные на судне 70, и/или насосы, установленные в наземном сооружении 77, и/или насосы, установленные на станции 75 загрузки и разгрузки.
Хотя изобретение описано со ссылкой на несколько конкретных вариантов осуществления, очевидно, что оно никоим образом не ограничивается ими, и что оно содержит все технические эквиваленты описанных средств и их сочетания, если они находятся в пределах объёма изобретения.
Некоторые из элементов, в частности, компоненты системы управления, могут быть изготовлены в различных формах единым или распределенным образом посредством аппаратных и/или программных компонентов. Аппаратные компоненты, которые могут быть использованы, представляют собой интегральные схемы специального назначения, программируемые логические интегральные схемы, программируемые логические массивы или микропроцессоры. Программные компоненты могут быть написаны на разных языках программирования, например, C, C++, Java или VHDL. Этот список не является исчерпывающим.
Использование глаголов «содержать» или «включать в себя» и производных форм не исключает наличия элементов или этапов, отличных от раскрытых в формуле изобретения. Использование единственного числа для элемента или этапа не исключает наличия множества таких элементов или этапов, если не указано иное. В частности, использование единственного числа в отношении этапа определения целевого состояния, на котором определяют конечные уровни заполнения резервуаров, не исключает определения нескольких целевых состояний, каждое из которых определяет конечные уровни заполнения резервуаров.
Использование ссылочных позиций в скобках в формуле изобретения не должно интерпретироваться как ограничение формулы изобретения.
Группа изобретений относится к способу управления уровнями заполнения множества резервуаров, расположенных на судне. Резервуары соединены с возможностью передачи жидкости между собой. Способ содержит этапы, на которых обеспечивают (7) начальное состояние резервуаров, определяют (8) целевое состояние, определяющее соответствующие конечные уровни заполнения упомянутых резервуаров. Далее определяют (9) сценарий передачи жидкости, причём сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение периода передачи для перехода из начального состояния в целевое состояние резервуаров. Затем вычисляют (10) вероятность повреждения резервуаров в ходе выполнения упомянутого сценария передачи в зависимости от последовательных уровней заполнения резервуаров в течение периода передачи. Далее передают (13) жидкость между резервуарами в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости. Техническим результатом является ограничение рисков, связанных с перемещениями жидкости, транспортируемой судном, содержащим множество частично заполненных резервуаров, по морю. 2 н. и 12 з.п. ф-лы, 6 ил.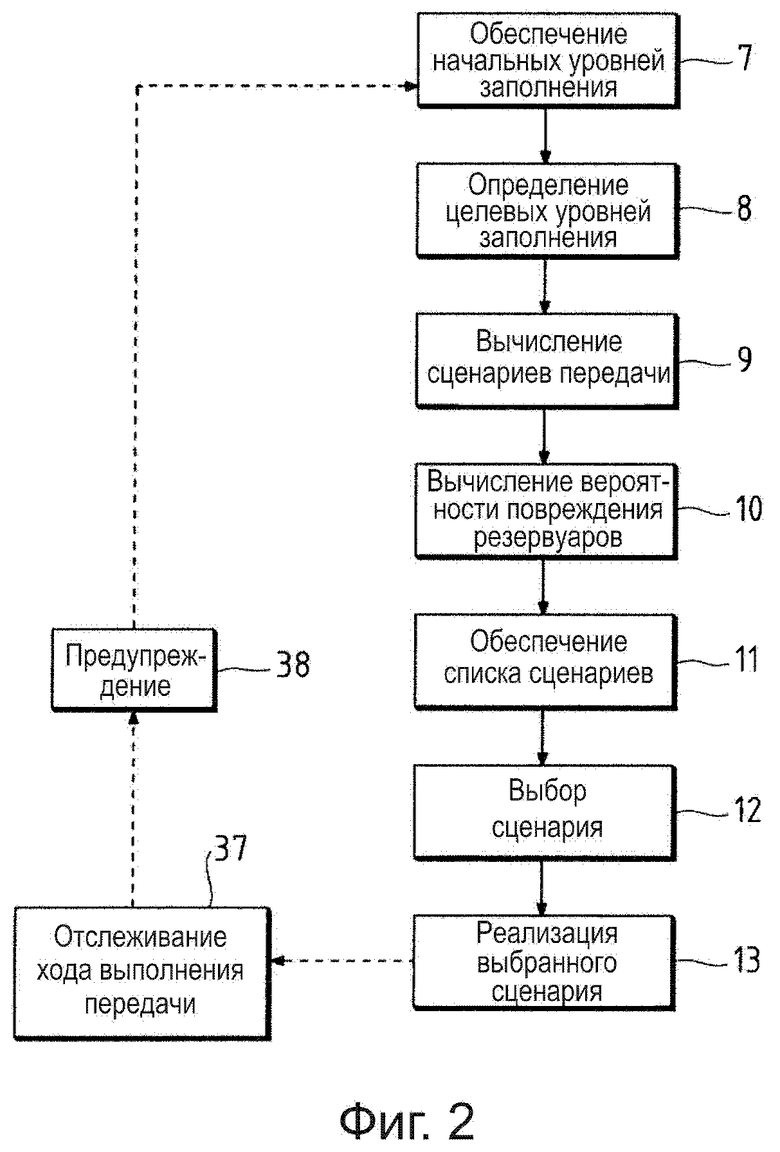
1. Способ управления для управления уровнями заполнения множества резервуаров (2, 3, 4, 5, 6), расположенных на судне (1), причём упомянутые резервуары (2, 3, 4, 5, 6) соединены с возможностью передачи жидкости между упомянутыми резервуарами (2, 3, 4, 5, 6), причём способ содержит этапы, на которых
обеспечивают (7) начальное состояние, определяющее начальные уровни заполнения резервуаров (2, 3, 4, 5, 6),
обеспечивают по меньшей мере один параметр окружающей среды, определяющий данные об окружающей среде судна, причём упомянутый по меньшей мере один параметр окружающей среды содержит высоту ветровых волн и/или высоту зыби,
определяют (8) целевое состояние, определяющее конечные уровни заполнения упомянутых резервуаров (2, 3, 4, 5, 6),
определяют (9) сценарий передачи жидкости, причем сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами (2, 3, 4, 5, 6) в течение периода передачи для перехода из начального состояния в целевое состояние резервуаров,
вычисляют (10) вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение периода передачи и упомянутых по меньшей мере одного параметра окружающей среды, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения сценария передачи,
генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами (2, 3, 4, 5, 6) в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
2. Способ управления по п. 1, дополнительно содержащий этап, на котором передают (13) жидкость между резервуарами (2, 3, 4, 5, 6) в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
3. Способ управления по любому одному из пп. 1, 2, дополнительно содержащий этап, на котором обеспечивают параметр пропускной способности при передаче, определяющий пропускную способность при передаче между резервуарами, причем сценарий передачи определяют в соответствии с упомянутым параметром, определяющим пропускную способность при передаче между резервуарами.
4. Способ управления по любому одному из пп. 1-3, в котором вероятность повреждения резервуаров вычисляют в зависимости от по меньшей мере одного параметра, выбранного из группы параметров, содержащей перемещения судна, уровни воздействия жидкости на стенки резервуаров, статистические характеристики воздействия перемещений жидкости, прочность резервуаров в зависимости от положения в упомянутых резервуарах, время нахождения на разных уровнях заполнения, скорость испарения газа, вызванного передачей жидкости, состояние загрузки конструкции судна.
5. Способ управления по любому из пп. 1-4, дополнительно содержащий этап, на котором определяют параметр в режиме реального времени и учитывают упомянутый параметр для определения сценария передачи.
6. Способ управления по любому одному из пп. 1-5, дополнительно содержащий этап, на котором определяют параметр в режиме реального времени и учитывают упомянутый параметр для определения вычисления вероятности повреждения резервуаров.
7. Способ управления по любому одному из пп. 1-6, в котором критерий приемлемости представляет собой критерий, связанный с риском повреждения резервуаров в ходе выполнения сценария передачи.
8. Способ управления по любому одному из пп. 1-7, в котором вероятность повреждения резервуаров вычисляют по следующей формуле:

где tk_n - номер резервуара n,
SC - условия плавания в зависимости от уровня fl_n заполнения резервуара tk_n,
Probtk_n - плотность вероятности возникновения давления Pressurf на внутренней поверхности резервуара tk_n, превышающего прочность Ressurf упомянутой внутренней поверхности резервуара tk_n, в зависимости от условий SC(fl_n) плавания,
surf - внутренняя поверхность, на которую воздействует жидкость, и
tope - продолжительность операции перехода из начального состояния в целевое состояние.
9. Способ управления по п. 8, в котором плотность Probtk_n(Pressurf>Ressurf,tk_n,SC(fl_n)) вероятности задана.
10. Способ управления по любому одному из пп. 1-9, причём способ дополнительно содержит этап, на котором непрерывно отслеживают (37) фактические последовательные состояния резервуаров в течение периода передачи и в ответ на обнаружение несоответствия между фактическими последовательными состояниями резервуаров и прогнозируемыми последовательными состояниями резервуаров, определёнными сценарием передачи, повторяют способ по п. 1.
11. Способ управления по любому одному из пп. 1-10, дополнительно содержащий этапы, на которых
определяют множество различных сценариев передачи, причём каждый сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение соответствующего периода передачи для перехода из начального состояния в целевое состояние,
вычисляют для каждого сценария передачи соответствующую вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение соответствующего периода передачи, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения упомянутого сценария передачи,
выбирают (12) один сценарий из множества сценариев передачи, и
генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами (2, 3, 4, 5, 6), в соответствии с выбранным сценарием передачи, если соответствующая вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
12. Способ управления по любому из пп. 1-11, дополнительно содержащий этапы, на которых:
определяют (8) множество целевых состояний, причём каждое целевое состояние определяет конечные уровни заполнения резервуаров,
определяют множество различных сценариев передачи, причем каждый сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами в течение соответствующего периода передачи для перехода из начального состояния в одно целевое состояние из множества целевых состояний,
вычисляют для каждого сценария передачи соответствующую вероятность повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение соответствующего периода передачи, причем вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения упомянутого сценария передачи,
выбирают (12) один сценарий из множества сценариев передачи, и
генерируют последовательность инструкций, предназначенных для передачи жидкости между резервуарами (2, 3, 4, 5, 6), в соответствии с выбранным сценарием передачи, если соответствующая вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
13. Способ управления по п. 11 или 12, в котором сценарий выбирают в зависимости от критерия приемлемости.
14. Компьютерная система управления уровнями заполнения резервуаров, при этом упомянутые резервуары расположены на судне (1) и соединены с возможностью передачи жидкости между упомянутыми резервуарами, причём система содержит средства для:
обеспечения (7) начального состояния, определяющего начальные уровни заполнения резервуаров (2, 3, 4, 5, 6),
обеспечения по меньшей мере одного параметра окружающей среды, определяющего данные об окружающей среде судна, причем упомянутый по меньшей мере один параметр окружающей среды содержит высоту ветровых волн и/или высоту зыби,
определения (8) целевого состояния, определяющего конечные уровни заполнения упомянутых резервуаров (2, 3, 4, 5, 6),
определения (9) сценария передачи жидкости, причем сценарий передачи определяет один или более потоков жидкости, которые должны передаваться между резервуарами (2, 3, 4, 5, 6) в течение периода передачи для перехода из начального состояния в целевое состояние резервуаров,
вычисления (10) вероятности повреждения резервуаров в зависимости от последовательных уровней заполнения резервуаров в течение периода передачи и из упомянутых по меньшей мере одного параметра окружающей среды, причём вероятность повреждения резервуаров определяет вероятность того, что по меньшей мере один резервуар будет повреждён в ходе выполнения сценария передачи,
генерирования последовательности инструкций, предназначенных для передачи жидкости между резервуарами (2, 3, 4, 5, 6) в соответствии с упомянутым сценарием передачи, если вероятность повреждения резервуаров удовлетворяет критерию приемлемости.
| Шаровая вибромельница | 1952 |
|
SU107190A1 |
| FR 2945511 A1, 19.11.2010 | |||
| СПОСОБ ДРЕНИРОВАНИЯ ЛЕВОГО ЖЕЛУДОЧКА ПРИ ПОВТОРНЫХ ОПЕРАЦИЯХ НА ВОСХОДЯЩЕМ ОТДЕЛЕ АОРТЫ И АОРТАЛЬНОМ КЛАПАНЕ В УСЛОВИЯХ ИСКУССТВЕННОГО КРОВООБРАЩЕНИЯ | 2019 |
|
RU2691520C1 |
| Соединение сваркою котельных листов и связей при разнородном материале их | 1927 |
|
SU12647A1 |
| УПРАВЛЕНИЕ ВЕРСИЯМИ ПРЕЦЕДЕНТОВ | 2012 |
|
RU2602783C2 |

