Заявляемая группа изобретений относится к области разведочной геофизики, в частности, к комплексам оборудования для осуществления геоэлектроразведки методом сопротивления, и предназначена для прогнозирования (определения мощности и границ) рудных тел глубоководных полиметаллических сульфидов (ГПС) при глубинах моря от до 4000 м.
В настоящее время известно несколько технических комплексов, обеспечивающих определение мощности рудных тел ГПС. Так, в статье Gehrmann et al. GeophysicalResearchLetters, 10.1029/2019 GL082928 описаны работы на месторождении ГПС TAG с использованием CSEM системы, состоящей из буксируемого у дна активного источника (DASI, Синха 1990) и двух трехкомпонентных приемников электрического поля (Вулкан, Констебль 2016), буксируемых на расстоянии 350 и 505 метров за DASI. Система DASI-Vulcan буксировалась на расстоянии 50 - 150 метров от дна с постоянной скоростью 1 узел. Импульсы тока прямоугольной формы с амплитудой 90 А и базовой частотой 1 Гц передавались через 50 метровую биполярную антенну. Проведенные работы показали возможность определения мощности и проводимости тел ГПС.
Недостатком такой системы является низкая производительность, свойственная всем технологиям с использованием буксируемых аппаратов. Кроме того, используемая буксируемая над дном приемная система, при обтекании рельефа дна, изменяет свою геометрию, что приводит к существенным погрешностями при интерпретации данных.
Известен способ электроразведки (RU 2069375,1996), используемый при поисках нефти и газа с дрейфующей льдины, при возбуждающие и приемные линии размещают вертикально в водном слое под льдиной и фиксируют их на дрейфующей льдине, причем приемные установки устанавливают в двух перпендикулярных направлениях X и Y, а возбуждающую установку размещают в вершине угла этих направлений. Перемещение установок происходит за счет дрейфа льдины, при этом из-за одинаковой скорости движения льдины и нижележащей толщи воды датчики постоянно находятся в вертикальном положении. Возбуждается электрическое поле путем воздействия периодическими знакопеременными импульсами тока с паузами на вертикальную электрическую линию. В паузах измеряется становление во времени первых и вторых разностей электрического потенциала в вертикальном направлении. По данным этих измерений формируется дифференциально-нормированный параметр - разность вертикальных разностей потенциалов, отнесенная к их сумме. Возбуждение среды и прием сигнала осуществляются вертикально ориентированными установками. В этом случае субгоризонтальные границы среды проявляются наиболее сильно. Установка дает возможность осуществлять поисковые работы на акваториях морей, под паковым льдом.
Поскольку движение льдин не поддается управлению, способ обуславливает получение информации в ограниченных условиях и достаточно случайных точках. Кроме того, способ может применяться для поиска нефти и газа на шельфе, но не имеет достаточной разрешающей способности для поиска рудных тел относительно меньшего размера.
Известно устройство (US 8148992, 2012), в котором на дистанционно управляемом аппарате (ДУА), в международном обозначении ROV, на выдвижном устройстве различной конструкции устанавливается индукционная катушка, являющаяся источником электромагнитного поля, ось которой расположена горизонтально. Отклик среды измеряется сенсорами магнитного и электрического поля, которые предполагается устанавливать на дне. Применение такого устройства в глубоководных работах крайне трудозатратно, низкопроизводительно и обладает не ясной геологической эффективностью.
Наиболее близко к заявляемому решению, устройство описанное авторами в статье: Е.Д. Лисицын, Л.Ф. Московская, А.А. Петров. Глубоководные морские вертикальные электрические зондирования. Геофизика. 2004, №6., с. 22-26. Описана установка зондирования ГПС в виде буксируемого аппаратурного комплекса. В комплексе на буксируемом аппарате располагались система подводной навигации, эхолот с датчиком давления и электроразведочный модуль, обеспечивающий формирование в генераторной линии низкочастотных гармонических колебаний электромагнитного поля и измерение отклика среды на парах электродов приемной линии. Генераторная и приемная линии объедены в единую электроразведочную установку (косу), которая буксировалась по дну в горизонтальном положении, причем генераторная линия располагалась за приемной относительно аппарата, что обеспечивало контакт с грунтом генераторных и приемных электродов. Общая длина электроразведочной установки около 200 метров, что обеспечивает определение мощности рудных тел на глубину более 50 метров.
К недостаткам такой установки следует отнести высокую вероятность обрыва линий электроразведочной установки из-за неровностей рельефа дна и сложности маневрирования при переходе с галса на галс, характерные для всех протяженных горизонтальных установок. Горизонтальная коса не позволяет однозначно интерпретировать результаты при размерах рудного тела близких к размеру косы, из-за сложности фиксации точных координат электродов в каждый момент времени.
Технической задачей, решаемой авторами являлось повышения точности определения мощности и конфигурации рудных тел ГПС на больших глубинах за счет создания технологии, обеспечивающей высокую разрешающую способность по латерали (по ходу движению аппарата) в сочетании с высокой производительностью и надежностью установки.
Технический результат в отношении заявляемого устройства достигается
путем применения дистанционно управляемого аппарата (ДУА) с «гаражом», на котором установлена лебедка линии связи нейтральной плавучести, обеспечивающая возможность перемещения ДУА по заданной системе профилей в пределах квадрата со стороной не менее 100 метров, «гараж» и ДУА оборудованы системами акустической навигации, обеспечивающими привязку «гаража» относительно судна и ДУА относительно «гаража» с точностью не хуже 0,2% от наклонной дальности, установки на ДУА электроразведочного комплекса, состоящего из приемного модуля, соединенного линией связи с ДУА и с приемной линией, на которой размещены приемные электроды, образующие не менее 7 измерительных разносов, и генераторного модуля с генераторной линией длиной 5-10 метров с генераторными электродами, в которой формируются гармонические колебания электрического тока в диапазоне частот 0-20 Гц, и имеющей на конце миниэхолот с датчиком давления, определяющий расстояние до дна нижнего генераторного электрода, причем генераторная и приемная линии, расположены на единой вертикальной оси общей длиной около 100 метров, и генераторная линия расположена под приемной линией над исследуемым объектом.
Технический результат в отношении заявляемого способа состоит в том, что для определения геоэлектрического разреза среды, над дном по заданной траектории перемещается ДУА с установленным электроразведочным комплексом, при этом приемная и генераторная линия, расположенные на единой оси, буксируются вертикально на скорости порядка 1 узла, и высота генераторной линии над дном контролируется миниэхолотом, в генераторной линии формируются гармонические колебания электрического тока в диапазоне частот 0-20 Гц, возбуждающие среду под дном, отклик среды, а именно, амплитуды и фазы сигналов, измеряются на разных разносах парами приемных электродов, расположенных на приемной линии, полученные данные интерпретируются для определения геометрии и мощности рудного тела.
Приемный модуль может располагаться внутри ДУА, однако, из-за высокой вероятности помех от движителей аппарата предпочтительнее располагать его вне ДУА.
Положение генераторного модуля условно, он может располагаться между генераторными электродами.
Увеличение частоты колебаний повышает помехозащищенность метода, но при этом уменьшается амплитуда полезного сигнала, вследствие чего использование частот выше 20 Гц нецелесообразно, а использование постоянного тока (частота 0 ГЦ) приводит к ускоренному разрушению генераторных электродов.
Для лучшего обеспечения вертикальности электроразведочного комплекса при движении аппарата, генераторная и приемная линии могут быть изготовлены из кабеля низкого гидродинамического сопротивления или оснащены иными элементами, снижающими турбулентность.
Изложенные положения иллюстрируются следующими рисунками
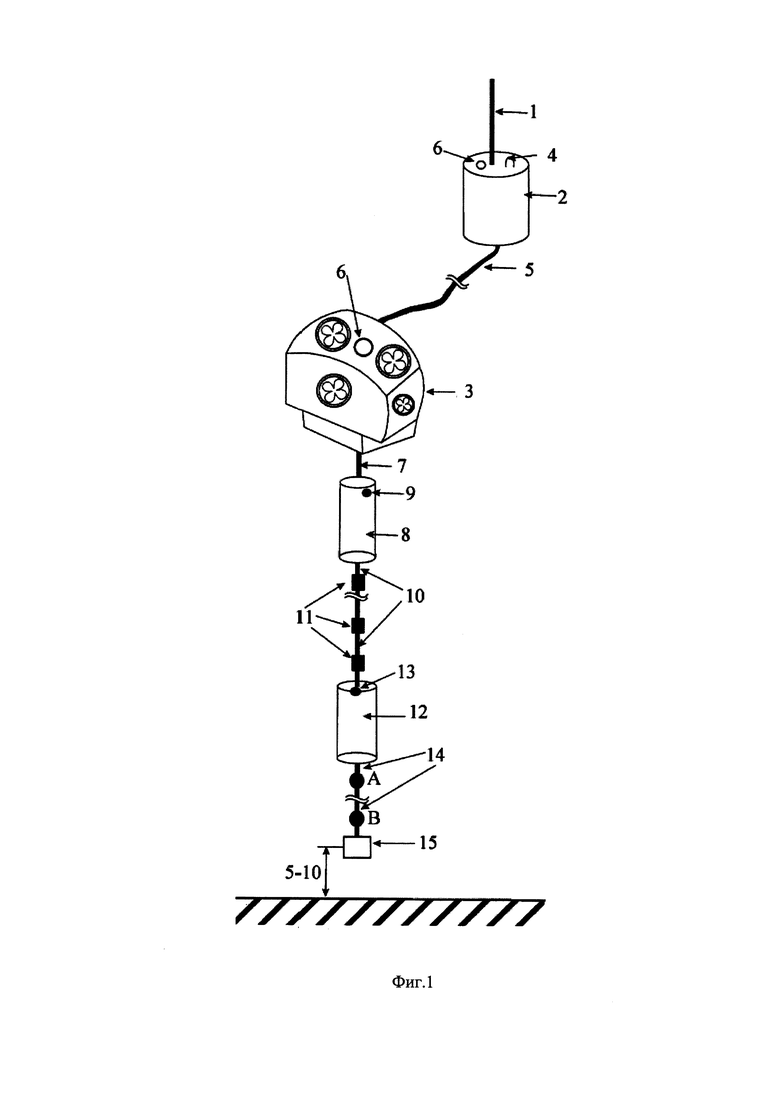
На фиг. 1 представлена общая схема устройства:
где 1 - трос-кабель, соединяющий устройство с судном (на рис. не показано); 2 - «гараж» ДУА с лебедкой линии связи аппарата; 3 - дистанционно управляемый аппарат (ДУА); 4 - элемент системы акустической навигации, определяющий положение «гаража» относительно судна; 5 - линия связи нейтральной плавучести между «гаражом» и ДУА; 6 - элементы системы акустической навигации, определяющие положение ДУА относительно «гаража»; 7 - линия связи электроразведочного комплекса с ДУА; 8 - приемный модуль; 9 - датчик давления; 10 - приемная лини; 11 - приемные электроды; 12 - генераторный модуль ЭС; 13 - датчик давления; 14 - генераторная линия; А,В - генераторные электроды; 15 - мини эхолот с датчиком давления.
На фиг. 2. представлена расчетная модель
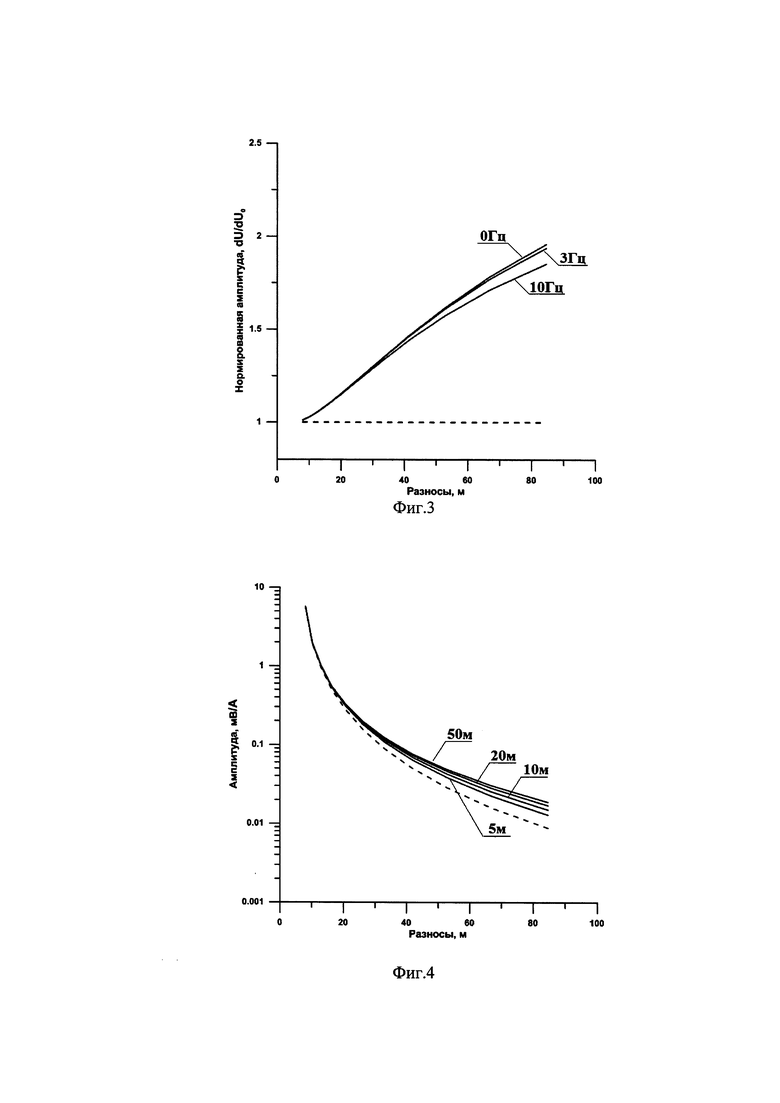
На фиг. 3 представлены результаты расчетов сигналов, нормированных на значения при отсутствии залежи, при различной частоте возбуждающего сигнала.
На фиг. 4 представлены результаты расчетов сигналов при различной мощности ГПС. Индексы на графиках показывают мощность. Для сравнения, пунктиром показаны сигналы при отсутствии ГПС.
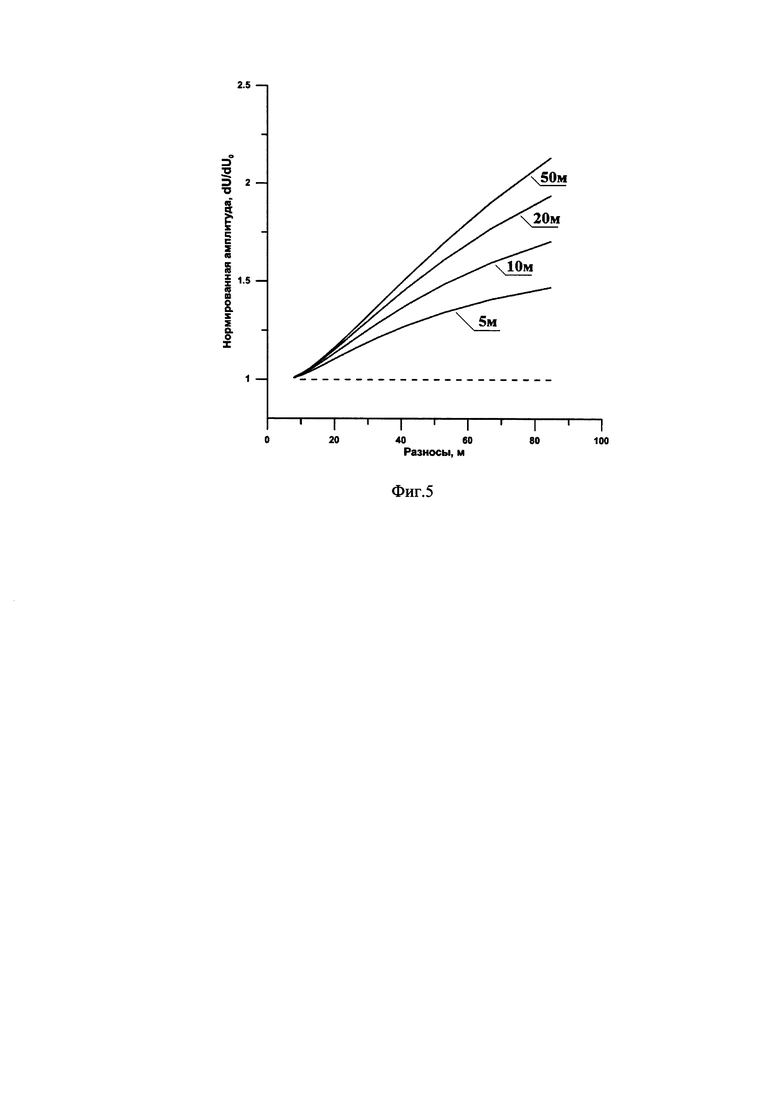
На фиг. 5 представлены результаты расчетов сигналов при различной мощности ГПС, нормированных на значения при отсутствии залежи. Индексы на графиках показывают мощность. Для сравнения пунктиром показаны сигналы при отсутствии ГПС.
Иллюстрация возможной схемы отработки площади исследований приведена на фиг. 6, где 16 - система профилей, 17 - контур залежи ГПС.
Работа с устройством осуществляется следующим образом. Судно - носитель (на рис. не показано) выходит в точку приблизительно являющейся центром рудного тела (рудного поля) и переходит в режим динамического позиционирования. С судна на трос-кабеле 1 производится спуск «гаража» 2 с находящимся внутри ДУА 3. Спуск продолжается до достижения «гаражом» глубины, при которой его высота над дном будет составлять длину электроразведочного комплекса плюс 20-50 метров. В процессе спуска и далее, положение аппарата относительно судна-носителя контролируется расположенным на нем элементом системы акустической навигации 4. После зависания «гаража» на нужной высоте и в нужной точке, по линии связи 5 дается команда и осуществляется вывод ДУА 3 в начальную точку отработки площади исследований. Положение ДУА относительно «гаража» определяется с помощью элементов системы акустической навигации 6. ДУА 3 выводится в начальную точку таким образом, чтобы расстояние до дна от нижнего генераторного электрода В составляло около 10 метров. Контроль этого параметра осуществляется с помощью миниэхолота 15. Движение ДУА с установленным электроразведочным комплексом, осуществляется в пределах исследуемой площади по заданной системе галсов. При этом, приемная и генераторная линия, расположенные на единой оси, буксируются вертикально на скорости порядка 1 узла, и высота генераторной линии над дном контролируется таким образом, чтобы электрод В оставался в коридоре расстояний от дна 5-10 метров.
В процессе движения ДУА 3, в генераторной линии 14 с помощью генераторного модуля 12 формируются гармонические колебания электрического тока заданной частоты. Измерение электромагнитного поля осуществляется на парах приемных электродов 11, расположенных на приемной линии 10, приемным модулем 8. Вертикальность приемной и генераторной линий в процессе движения ДУА контролируется по разности показаний датчиков давления 13 и 9, и 15 и 13 соответственно. Обработка измеренных сигналов на разных разносах позволяет строить геоэлектрические разрезы по галсам и получать трехмерную модель рудного тела ГПС.
По завершении обработки площади исследования ДУА подтягивается к «гаражу» и осуществляется частичный или полный подъем устройства для перехода в следующую точку работ.
Оценка геологической эффективности предлагаемого способа проводилась путем математического моделирования. Для моделирования была использована установка общей длиной 99.6 м, с генераторной линией 10 м и двенадцати электродной приемной линией: В 10 м А 2м M1 2м М2 2.3м М3 3.1м М4 3.8м М5 4.8м М6 6.1м М7 7.7м М8 9.8м М9 12м М10 16м М11 20м М12. Нижний генераторный электрод располагался в 5 м от дна. Расчетная трехслойная модель (вода-ГПС-фундамент) представлена на фиг. 2. Мощность ГПС варьировалась от 5 до 50 м. Результаты расчетов сравнивались с результатами, полученными в отсутствии ГПС. На фиг. 3 представлены результаты расчетов сигналов, нормированных на значения при отсутствии залежи, при различной частоте возбуждающего сигнала. При мощности залежи ГПС порядка 20 м значения, полученные на частоте 3 Гц, мало отличаются от измерений при постоянном токе (частота 0 Гц), но при этом сами измерения обладают повышенной помехозащищенностью. На фиг. 4 представлены результаты расчетов сигналов при различной мощности ГПС. Индексы на графиках показывают мощность слоя. Для сравнения, пунктиром показаны сигналы при отсутствии ГПС. Расчеты выполнены для частоты 3 Гц. На фиг. 5 представлены результаты расчетов сигналов при различной мощности ГПС, нормированных на значения при отсутствии залежи. Индексы на графиках показывают мощность слоя. Для сравнения пунктиром показаны сигналы при отсутствии ГПС.
Представленные результаты расчетов демонстрируют возможность уверенного определения мощности залежи ГПС при измерениях заявляемой вертикальной установкой.
Достоинством заявляемой технологии является повышение точности определения мощности и конфигурации рудных тел ГПС на больших глубинах за счет позиционирования устройства, независимого от рельефа дна, а также ее высокая производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2612726C2 |
| АППАРАТУРНЫЙ КОМПЛЕКС ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ | 2012 |
|
RU2510052C1 |
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И АППАРАТУРНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324956C2 |
| СПОСОБ 3D МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2007 |
|
RU2356070C2 |
| ИССЛЕДОВАТЕЛЬСКИЙ КОМПЛЕКС ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2780574C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2006 |
|
RU2375728C2 |
| УСТРОЙСТВО ДЛЯ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ В ДВИЖЕНИИ СУДНА И СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ | 2004 |
|
RU2253881C9 |
| ДОННАЯ СТАНЦИЯ ДЛЯ МОРСКИХ ГЕОФИЗИЧЕСКИХ ИССЛЕДОВАНИЙ | 2012 |
|
RU2510051C1 |
| ДОННАЯ СТАНЦИЯ (ВАРИАНТЫ) | 2008 |
|
RU2377606C2 |
| СИСТЕМЫ СБОРА ДАННЫХ ДЛЯ МОРСКОЙ МОДИФИКАЦИИ С КОСОЙ И ПРИЕМНЫМ МОДУЛЕМ | 2016 |
|
RU2639728C1 |


Изобретения относятся к области разведочной геофизики, а именно к комплексам оборудования для осуществления геоэлектроразведки методом сопротивления, и предназначены для прогнозирования (определения мощности и границ) рудных тел глубоководных полиметаллических сульфидов (ГПС) при глубинах моря до 4000 м. Устройство для морской электроразведки содержит дистанционно управляемый аппарат (ДУА) с гаражом, на котором установлена лебедка линии связи нейтральной плавучести, обеспечивающая возможность перемещения ДУА по заданной системе профилей. Гараж и ДУА оборудованы системами акустической навигации, обеспечивающими привязку гаража относительно судна и ДУА относительно гаража с точностью не хуже 0,2% от наклонной дальности. На ДУА установлен электроразведочный комплекс, состоящий из приемного модуля, соединенного линией связи с ДУА и с приемной линией, расположенного ниже приемной линии генераторного модуля с генераторной линией длиной 5-10 метров с генераторными электродами. Генераторная и приемная линии выполнены из кабеля низкого гидродинамического сопротивления. На приемной линии размещены приемные электроды, образующие не менее 7 измерительных разносов. Генераторная линия имеет на конце миниэхолот с датчиком давления. ДУА с установленным электроразведочным комплексом перемещается над дном по заданной траектории. При этом приемная и генераторная линия буксируются вертикально на скорости порядка 1 узла. Высота генераторной линии над дном контролируется миниэхолотом. Технический результат: повышение точности определения мощности и конфигурации рудных тел ГПС на больших глубинах, высокая производительность. 2 н. и 2 з.п. ф-лы, 6 ил.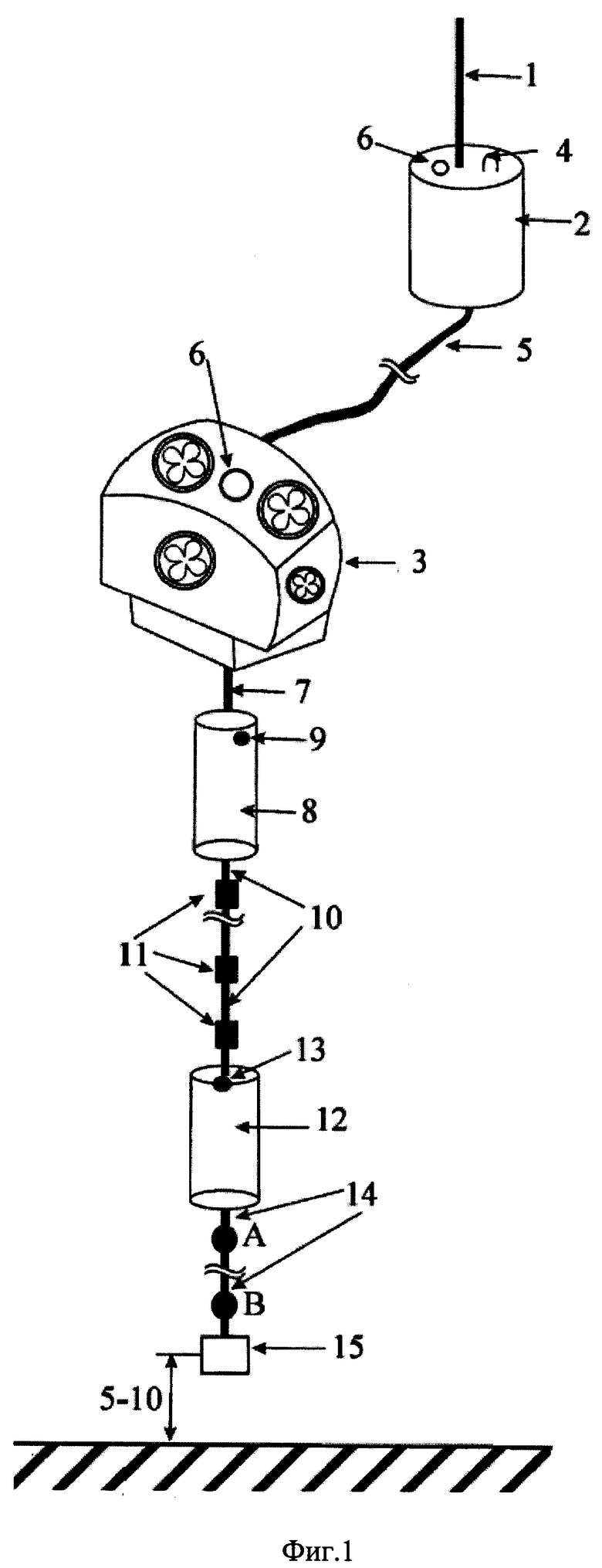
1. Устройство для морской электроразведки месторождений глубоководных полиметаллических сульфидов, содержащее дистанционно управляемый аппарат (ДУА) с гаражом для размещения внутри него ДУА, на гараже установлена лебедка линии связи нейтральной плавучести, обеспечивающая возможность перемещения ДУА по заданной системе профилей в пределах квадрата со стороной не менее 100 метров, гараж и ДУА оборудованы системами акустической навигации, обеспечивающими привязку гаража относительно судна и ДУА относительно гаража с точностью не хуже 0,2% от наклонной дальности, отличающееся тем, что на ДУА установлен электроразведочный комплекс, состоящий из приемного модуля, соединенного линией связи с ДУА и с приемной линией, на которой размещены приемные электроды, образующие не менее 7 измерительных разносов, и расположенного ниже приемной линии генераторного модуля с генераторной линией длиной 5-10 метров с генераторными электродами, в которой формируются гармонические колебания с частотой не более 20 Гц, и имеющей на конце миниэхолот с датчиком давления, определяющий расстояние до дна нижнего генераторного электрода, причем генераторная и приемная линии расположены на единой вертикальной оси общей длиной около 100 метров, и генераторная линия расположена под приемной линией.
2. Устройство по п. 1, отличающееся тем, что генераторный модуль расположен между генераторными электродами.
3. Устройство по п. 1, отличающееся тем, что генераторная и приемная линии выполнены из кабеля низкого гидродинамического сопротивления.
4. Способ морской электроразведки месторождений глубоководных полиметаллических сульфидов, включающий в себя возбуждение электромагнитного поля генераторной линией и измерение отклика среды многоразносной приемной линией для построения геоэлектрического разреза вдоль профиля наблюдений, отличающийся тем, что над дном по заданной траектории перемещается ДУА с установленным электроразведочным комплексом, при этом приемная и генераторная линии, расположенные на единой оси, буксируются вертикально на скорости порядка 1 узла, и высота генераторной линии над дном контролируется миниэхолотом.
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ И АППАРАТУРНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324956C2 |
| Автомат для импульсно-дуговой наплавки | 1959 |
|
SU129269A1 |
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ | 1993 |
|
RU2069375C1 |
| US 8148992 B2, 03.04.2012 | |||
| JP 6609823 B2, 27.11.2019 | |||
| US 10310126 B2, 04.06.2019. | |||

