Изобретение относится к области оптических измерений, а именно, к волоконно-оптическим устройствам для измерения угловой скорости с использованием гироскопических эффектов и способам их работы.
Измерение угловой скорости традиционно производится датчиками угловой скорости (ДУС) разного типа гироскопов, в том числе волоконно-оптическим гироскопом (ВОГ), в котором чувствительным элементом (ЧЭ) является интерферометр Саньяка (ИС). Величина случайной разности фаз встречных лучей в ИС, определяет уровень дрейфа ДУС, тем самым, снижает точность измерения угловой скорости. Это особенно актуально для навигации при длительном непрерывном периоде эксплуатации ВОГ из-за с накопления случайной ошибки в показаниях гироскопа, особенно в верхних и нижних широтах Земли. Из уровня техники известен способ определения угловой скорости и компенсации дрейфа гироскопа, в том числе ВОГ, на основе двойного гирокомпассирования [Гироскопические системы. Гироскопические приборы и системы: Учеб. для вузов по спец. "Гироскоп, приборы й устройства" / Д.С. Пельпор, И.А. Михалев, В.А. Бауман.; Под ред. Д.С. Пельпора. - М: Высш. шк., 1988]. В этом случае измеряется угловая скорость в исходном положении, затем производится разворот устройства на 180° в пространстве и снова измеряется угловая скорость. Способ основан на том, дрейф в ИС, не зависит от пространственной ориентации ВОГ и сохраняет знак, а составляющая угловой скорости, измеряемая по вектору угловой скорости вращения Земли при развороте устройства на 180°, изменяет знак на противоположный. Это используется для определения и компенсации дрейфа.
Основными недостатками известного способа являются необходимость разворота устройства на 180°, а также невозможность компенсировать дрейф непрерывно в процессе эксплуатации гироскопа. Кроме того, дрейф измеряется в разные моменты времени и может быть определен только по усредненным значениям, что снижает степень компенсации.
Также метод ограничен к применению в верхних и нижних широтах Земли, вследствие ограничения эксплуатации ВОГ в случае значительного снижения чувствительности и потери полезного сигнала, когда уровень дрейфа близок к величине измеряемой угловой скорости Земли.
Из уровня техники также известны интегрально-оптический наногироскоп и способ его работы [«Nanophotonic optical gyroscope with reciprocal sensitivity enhancement))» (Нанофотонный оптический гироскоп с Из уровня техники известен способ определения угловой скорости и компенсации дрейфа гироскопа, в том числе ВОГ, на основе двойного гирокомпассирования [Гироскопические системы. Гироскопические приборы и системы: Учеб. для вузов по спец. "Гироскоп, приборы и устройства" / Д.С. Пельпор, И.А. Михалев, В.А. Бауман.; Под ред. Д.С. Пельпора. - М.: Высш. шк., 1988]. В этом случае измеряется угловая скорость в исходном положении, затем производится разворот устройства на 180° в пространстве и снова измеряется угловая скорость. Способ основан на том, дрейф в ИС, зависит от пространственной ориентации ВОГ и изменяет знак, а составляющая угловой скорости, измеряемая по вектору угловой скорости вращения Земли при развороте устройства на 180°, не изменяет знак на противоположный. Это используется для определения и компенсации дрейфа.
Основными недостатками известного способа являются необходимость разворота устройства на 180°, а также невозможность компенсировать дрейф непрерывно в процессе эксплуатации гироскопа.
Наиболее близким по технической сущности к предлагаемому изобретению является волоконно-оптический датчик угловой скорости, содержащий источник лазерного излучения с двумя выходами, чувствительный элемент, содержащий два узла входа/выхода и расположенные между ними два оптических волновода, которые работают на эффекте Саньяка; и блок обработки сигнала с двумя фотодетекторами, в котором первый узел входа/выходы чувствительного элемента соединен с первым выходом источника излучения и первым фотодетектором, а второй узел входа/выхода чувствительного элемента соединен со вторым выходом источника излучения и вторым фотодетектором (см. публикацию WO 2018222768, кл. G01C 19/72, опубл. 06.12.2018). В известном устройстве указанные волноводы выполнены в виде интегрально-оптических кольцевых резонаторов. Среди недостатков следует отметить измерение в разные моменты времени, при этом для повышения точности требуется высокая частота переключения, что наводит дополнительную помеху и снижает точность измерения. Из указанного документа известен также способ измерения угловой скорости с помощью описанного датчика. Недостатками известного устройства являются сложность изготовления и относительно невысокая точность результатов измерения вследствие необходимости переключения направлений измерения.
Технической проблемой является устранение вышеуказанных недостатков и создание простого устройства ДУС с эффективной компенсацией дрейфа - случайной составляющей угловой скорости, например, из-за температурного влияния и других факторов, не связанных с вращением устройства. Технический результат заключается в повышении точности измерения угловой скорости.
В части устройства поставленная проблема решается, а технический результат достигается тем, что в волоконно-оптическом датчике угловой скорости, содержащем источник лазерного излучения с двумя выходами, чувствительный элемент, содержащий два узла входа/выхода и расположенные между ними два оптических волновода, которые работают на эффекте Саньяка; и блок обработки сигнала с двумя фотодетекторами, в котором первый узел входа/выходы чувствительного элемента соединен с первым выходом источника излучения и первым фотодетектором, а второй узел входа/выхода чувствительного элемента соединен со вторым выходом источника излучения и вторым фотодетектором, чувствительный элемент сформирован как интерферометр Маха-Цандера, в плечи которого включены указанные оптические волноводы, при этом плечи интерферометра отличаются по длине не более, чем на длину когерентности источника излучения, а указанные оптические волноводы выполнены в виде волоконно-оптических катушек, по меньшей мере, частично намотанных вокруг общей оси, причем начало первой катушки соединено с первым выводом первого узла входа/выхода чувствительного элемента, а ее конец - с первым выводом второго узла входа/выхода чувствительного элемента; начало второй катушки соединено со вторым выводом второго узла входа/выхода чувствительного элемента, а ее конец - со вторым выводом первого узла входа/выхода чувствительного элемента. Первый и второй узел интерференции - в виде разветвителя 1×2 и идущего к катушкам интегрально-оптического модулятора Y-типа. Все соединения выполнены с постоянным соединением, не требуют переключения по направлению.
В части способа поставленная проблема решается, а технический результат достигается тем, что согласно способу измерения угловой скорости с помощью вышеописанного датчика непрерывно направляют когерентные лазерные лучи на первый и второй узлы входа/выходы чувствительного элемента, одновременно и непрерывно формируют первую и вторую интерференционную картину за счет интерференции первой пары лучей, идущих от начала первой катушки и конца второй катушки, и интерференции второй пары лучей, идущих от конца первой катушки и начала второй катушки; непрерывно регистрируют с помощью фотодетекторов сформированные интерференционные картины; непрерывно определяют первое промежуточное значение угловой скорости на основе первой интерференционной картины; непрерывно определяют второе промежуточное значение угловой скорости на основе второй интерференционной картины; определяют результирующее значение угловой скорости на основе полученных первого и второго промежуточных значений.
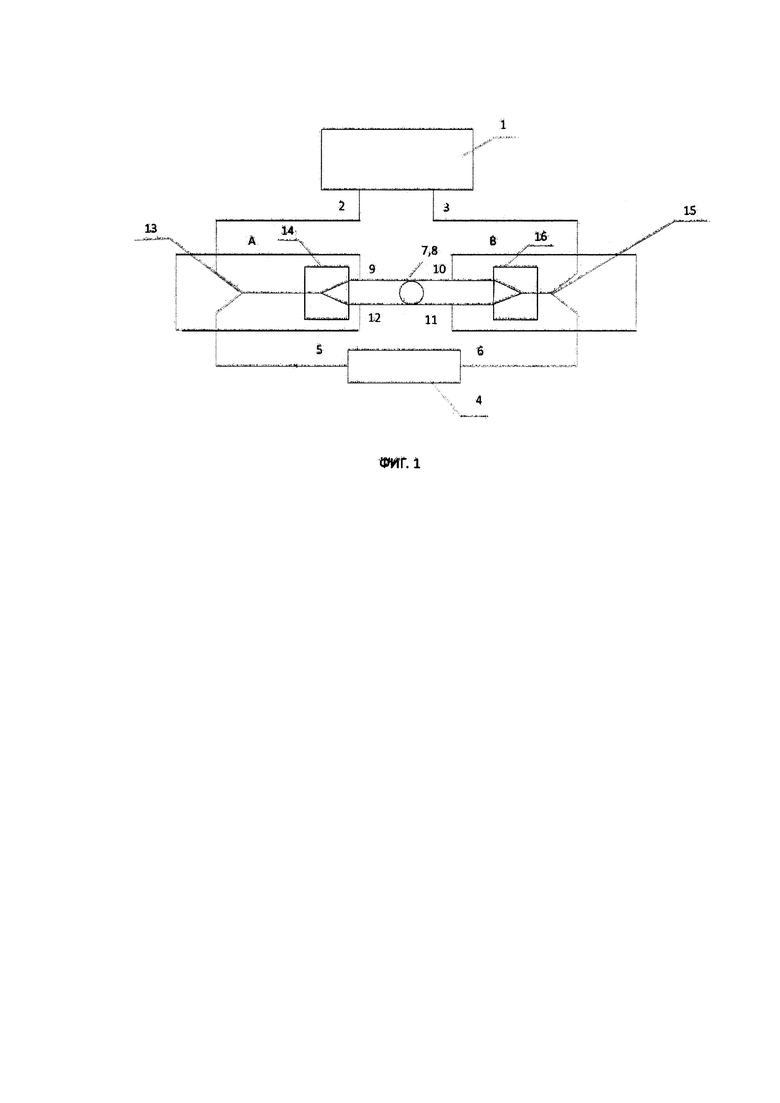
На фиг. 1 представлена оптическая схема предлагаемого датчика.
Предлагаемый волоконно-оптический датчик угловой скорости состоит из источника 1 когерентного лазерного излучения (ИИ) с двумя выходами 2, 3 и изоляторами для гашения обратного луча, чувствительного элемента (ЧЭ) с двумя узлами входа/выхода (А и В) и блока 4 обработки сигнала с двумя фотодетекторами 5, 6.
Блок 4 обеспечивает преобразование оптического сигнала в электрический, математическую обработку результатов измерений и управление работой ДУС: задает рабочую точку для работы ЧЭ, обеспечивает модуляцию сигнала компенсации фазового сдвига Саньяка при вращении ДУС, производит математические действия для обработки результатов измерения и вывод данных.
Первый узел А входа/выходы ЧЭ соединен с первым выходом 2 ИИ и первым фотодетектором 5, а второй узел В входа/выхода ЧЭ соединен со вторым выходом 3 ИИ и вторым фотодетектором 6. Излучение от источника 1 подается на узлы А, В ЧЭ, а в обратном направлении выполняется вывод лучей после интерференции с выходов ЧЭ на блок 4. Лучи, которые в обратном направлении поступают на ИИ, гасятся на изоляторах.
Между узлами А и В расположены два оптических волновода в виде двух отдельных многовитковых волоконно-оптических катушек 7 и 8. Катушки 7 и 8, по меньшей мере, частично намотаны последовательно вокруг общей оси в одном направлении и противонаправлено чувствительны к эффекту Саньяка, что обеспечивает точность измерения и работу устройства. Катушки 7, 8 могут наматываться одна на другую, или параллельно с использованием, например, квадрупольного типа намотки.
Сам чувствительный элемент сформирован как интерферометр Маха-Цандера, в плечи которого включены катушки 7, 8, состыкованные противонаправлено относительно начала их намотки. Под началом катушки понимается начало намотки катушек в одном направлении намотки, например, по часовой стрелке. Для обеспечения интерференции плечи интерферометра отличаются по длине не более, чем на длину когерентности источника излучения 1.
Начало первой катушки 7 соединено с первым выводом 9 первого узла А входа/выхода ЧЭ, а ее конец - с первым выводом 10 второго узла В входа/выхода ЧЭ. Начало второй катушки 8 соединено со вторым выводом 11 второго узла В входа/выхода ЧЭ, а ее конец - со вторым выводом 12 первого узла А входа/выхода ЧЭ.
Узел А входа/выхода ЧЭ (см. фиг. 1) предпочтительно выполнен в виде разветвителя 13 1x2 («один на два», т.е. объединяющего три участка оптического волокна в одной точке) и идущего к катушкам 7, 8 интегрально-оптического фазового модулятора 14. Модулятор 14 выполнен на пластине ниобата лития с канальными волноводами в виде разветвителя Y-типа, имеющего по три входа/выхода, и предназначен для разделения оптических лучей и обеспечения интерференции при их сложении. Модулятор 14 оснащен электродами для выставки начального сдвига фаз (рабочей точки), которые управляются блоком 4. В альтернативном варианте разветвитель 13 может быть заменен на циркулятор. Узел В может быть выполнен аналогичным образом в виде модулятора 16 и делителя 15.
Предлагаемое устройство работает согласно предлагаемому способу следующим образом.
Когерентные лазерные лучи от источника 1 непрерывно направляют на первый А и второй В узлы входа/выходы чувствительного элемента, в котором одновременно и непрерывно формируют первую и вторую интерференционную картину за счет интерференции первой пары лучей, идущих от начала первой катушки 7 и конца второй катушки 8, и интерференции второй пары лучей, идущих от конца первой катушки 7 и начала второй катушки 8. Сформированные интерференционные картины непрерывно регистрируют с помощью фотодетекторов 5, 6. При этом непрерывно определяют первое промежуточное значение угловой скорости на основе первой интерференционной картины и второе промежуточное значение угловой скорости на основе второй интерференционной картины, а результирующее значение угловой скорости определяют на основе полученных первого и второго промежуточных значений. Рассмотрим процесс более подробно.
При проходе через узлы А, В входа/выхода ЧЭ лучи от выходов 2, 3 ИИ разделяются попарно на два луча. Из них в каждом плече постоянно распространяются встречно один луч от узла А и второй луч от узла В.
Вследствие эффекта Саньяка, при вращении ЧЭ, например, по часовой стрелке, в верхнем по фиг. 2 плече интерферометра Маха-Цендера (катушке 7), для первого луча от узла А к узлу В будет происходить положительное приращение фазы светового потока (+ΔY), а для встречного луча уменьшение фазы (-ΔY), поскольку в плече включена катушка 8 с намоткой, в данном примере, по часовой стрелке. Для второго, вследствие встречного включения катушки 8 и также вследствие намотки по часовой стрелке, наоборот (-ΔY) и (+ΔY). При изменении направления вращения устройства знаки изменения фазы во всех точках изменяются на противоположные. В результате, после интерференции, на одном выходе интерферометра Маха-Цандера (узел А) интенсивность светового потока будет зависеть от мгновенной величины и вектора угловой скорости в одном направлении, а на другом выходе (узле В) от вектора угловой скорости в противоположном направлении.
Знаки приращения (уменьшения) фаз оптических лучей, взывающих дрейф (Например, за счет тепловых флуктуаций), для встречных лучей в плечах интерферометра не зависят от вращения устройства и одинаковы в одном или другом плече. Изменения знаков мгновенных случайных значений приращения фазы происходит одновременно и однонаправленно для встречных лучей в одном или втором плече интерферометра в зависимости от влияния факторов, вызывающих дрейф, например, удлинения верхнего плеча от прироста температуры и уменьшение длины нижнего плеча. При этом предлагаемая схема ДУС работает в этом же порядке, т.к. катушки 7, 8 имеют общую ось вращения.
В результате предлагаемого соединения оптических элементов составляющие угловой скорости, вызванные вращением ВОГ, на первом и втором выходе ЧЭ равны по модулю, но имеют разные знаки, а приращение противонаправленных угловых скоростей, вызванное дрейфом, не зависит от направления вращения. Это позволяет определить мгновенную угловую скорость с компенсацией мгновенного значения дрейфа, без усреднения значений, без разворота устройства и постоянно. Угловая скорость на первом выходе ЧЭ (узле А) состоит их двух составляющих и определяется формулой:

где ω1 - угловая скорость на выходе узла А;
ω1.1 - составляющая угловой скорости без дрейфа на выходе узла А;
ωд1 - дрейф на выходе узла А.
Для второго выхода ЧЭ (узла В) будет определяться угловая скорость в противоположном направлении, причем модули этих величин равны:

где ω2 - угловая скорость на выходе узла В;
ω1.1 - составляющая угловой скорости без дрейфа на выходе узла В;
- ωд2 - дрейф на выходе узла В.
Измерение мгновенных значений угловых скоростей производится с обоих выходов ЧЭ (узле А и узле В), в котором в каждом плече интерферометра Маха-Цандера пара встречных лучей проходит по одной и той же той же волоконно-оптической катушке. Поскольку выходы А и В противонаправлены к друг другу и случайные составляющие угловых скоростей - дрейф - измеряются в один и тот же момент времени на обоих выходах ЧЭ, поэтому они равны по модулю после усреднения, но имеют противоположные знаки и коррелированы между собой, соответственно при сложении компенсируют друг друга.
Выходные оптические лучи с узлов А и В поступают в блок 4, где происходит преобразование из оптического вида в электрический и математическая обработка результата.
В результате в блоке 4 при сложении формул (1) и (2) получаем удвоенную величину угловой скорости с компенсацией дрейфа:

где ωк - угловая скорость с компенсацией дрейфа;
ω1.1 - составляющая угловой скорости без дрейфа на выходе узла А;
ω1.1 - составляющая угловой скорости без дрейфа на выходе узла В;
ωд1 - дрейф на выходе узла А;
- ωд2 -дрейф на выходе узла В.
Определение суммы угловых скоростей производятся в блоке 4 после преобразования в электрический вид и делится на 2, либо учитывается в процессе калибровки. В результате на выход блока 4 подается мгновенное значение угловой скорости с компенсацией дрейфа.
Предлагаемые технические решения позволяют проводить непрерывное измерение мгновенной угловой скорости в реальном масштабе времени с компенсацией мгновенных значений величины дрейфа, постоянно, без перерыва в эксплуатации ВОГ, без потери информации в ДУС, необходимости усреднения значений и физического разворота устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Волоконно-оптический датчик угловой скорости | 2022 |
|
RU2795737C1 |
| Гибридный датчик угловой скорости | 2023 |
|
RU2816825C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ БЕЗ МОДУЛЯТОРА | 2023 |
|
RU2815704C1 |
| Датчик угловой скорости | 2022 |
|
RU2793727C1 |
| Фотонный ДУС на кольцевом оптическом резонаторе | 2023 |
|
RU2815205C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020416C1 |
| СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА С ОТКРЫТЫМ КОНТУРОМ | 2012 |
|
RU2523759C1 |
| Способ измерения угловой скорости с помощью волоконно-оптического гироскопа | 1990 |
|
SU1818527A1 |
| МАЛОГАБАРИТНЫЙ ИЗМЕРИТЕЛЬ ВЕКТОРА УГЛОВОЙ СКОРОСТИ НА ОСНОВЕ ВОЛОКОННО-ОПТИЧЕСКОГО ГИРОСКОПА | 2017 |
|
RU2676944C1 |
| Волоконно-оптический гироскоп с большим динамическим диапазоном измерения угловых скоростей | 2016 |
|
RU2620933C1 |
Группа изобретений относится к области оптических измерений, а именно к волоконно-оптическим устройствам для измерения угловой скорости с использованием датчиков, использующих эффект Саньяка. Волоконно-оптический датчик угловой скорости содержит источник лазерного излучения, чувствительный элемент с двумя входами/выходами и блок обработки сигнала с двумя фотодетекторами. Каждый узел входа/выхода соединен с источником излучения и своим фотодетектором. При этом чувствительный элемент реализован как два противонаправленных интерферометра Маха - Цандера, каждый из которых работает на основе одних и тех же двух волоконно-оптических катушках, намотанных последовательно по меньше мере частично вокруг общей оси. Технический результат - повышение точности измерения угловой скорости за счет эффективной компенсации дрейфа волоконно-оптического чувствительного элемента. 2 н.п. ф-лы, 1 ил.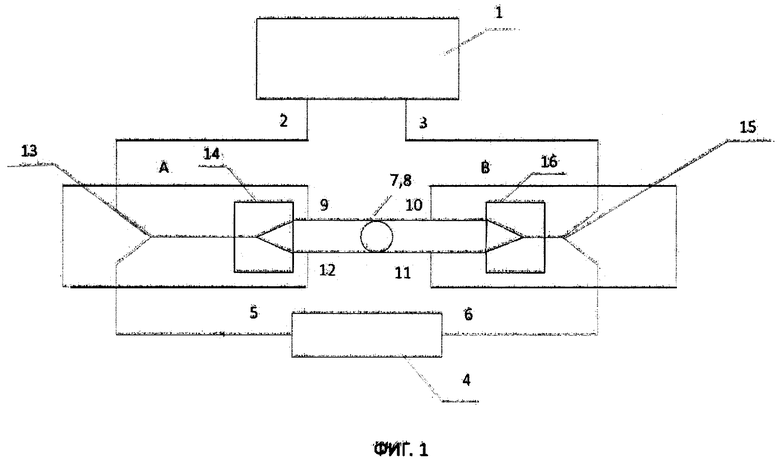
1. Волоконно-оптический датчик угловой скорости, содержащий источник лазерного излучения с двумя выходами, чувствительный элемент, построенный на основе интерферометра Маха - Цандера, содержащий два узла входа/выхода и расположенные между ними два оптических волновода, которые работают на эффекте Саньяка; и блок обработки сигнала с двумя фотодетекторами, в котором первый узел входа/выходы чувствительного элемента соединен с первым выходом источника излучения и первым фотодетектором, а второй узел входа/выхода чувствительного элемента соединен со вторым выходом источника излучения и вторым фотодетектором, отличающийся тем, что в плечи чувствительного элемента включены указанные оптические волноводы, при этом плечи интерферометра Маха - Цандера отличаются по длине не более чем на длину когерентности источника излучения, а указанные оптические волноводы выполнены в виде волоконно-оптических катушек, по меньшей мере частично намотанных вокруг общей оси, причем начало первой катушки соединено с первым выводом первого узла входа/выхода чувствительного элемента, а ее конец - с первым выводом второго узла входа/выхода чувствительного элемента; начало второй катушки соединено со вторым выводом второго узла входа/выхода чувствительного элемента, а ее конец - со вторым выводом первого узла входа/выхода чувствительного элемента.
2. Способ измерения угловой скорости с помощью датчика по п. 1, согласно которому
- непрерывно направляют когерентные лучи на первый и второй узлы входа/выходы чувствительного элемента, одновременно и непрерывно формируют первую и вторую интерференционную картину за счет интерференции первой пары лучей, идущих от начала первой катушки и конца второй катушки, и интерференции второй пары лучей, идущих от конца первой катушки и начала второй катушки;
- непрерывно регистрируют с помощью фотодетекторов сформированные интерференционные картины;
- непрерывно определяют первое промежуточное значение угловой скорости на основе первой интерференционной картины;
непрерывно определяют второе промежуточное значение угловой скорости на основе второй интерференционной картины;
- определяют результирующее значение угловой скорости на основе полученных первого и второго промежуточных значений.
| ОПТИЧЕСКИЙ ГИРОСКОП С ПАССИВНЫМ КОЛЬЦЕВЫМ РЕЗОНАТОРОМ | 1997 |
|
RU2124185C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1992 |
|
RU2039934C1 |
| Способ адаптивного сканирования подстилающей поверхности лучом лазерного локатора в режиме информационного обеспечения маловысотного полета | 2016 |
|
RU2706912C2 |
| US 20220128361 A1, 28.04.2022 | |||
| EP 3657126 B1, 16.06.2021. | |||

