Изобретение относится к способу управления ядерным реактором с водой под давлением, предпочтительно на атомной электростанции. Оно также относится к соответствующей системе управления.
Ядерный реактор - это сложная нелинейная система со сложной динамикой в широком масштабе времени; всесторонний контроль над ним нетривиален. Помимо хорошо известного контроля тепловой мощности и температуры теплоносителя, контроллеры реактора заботятся о множестве других аспектов, таких как эксплуатационная безопасность, допускающая работу только в заданных пределах, равномерное выгорание, компенсация выгорания, компенсация отравления, равномерное распределение плотности мощности, поддержка гибкого производства электроэнергии, экономичность эксплуатации и т.д.
Управление ядерными реакторами во всем мире в настоящее время основано на технологии управления. Однако обычная технология управления, используемая для этой задачи, достигает пределов применимости. Основными трудностями этого подхода являются: попытка решить обратную задачу для сложной системы, сложная и долговременная динамика реакторных шлаков и их пространственного распределения, а также количество целей управления, которое значительно превышает количество доступных объектов.
Поэтому цель настоящего изобретения состоит в том, чтобы предложить способ регулирования или управления ядерным реактором с водой под давлением, а также предоставить соответствующую систему управления, которая может одновременно учитывать и уравновешивать большое количество целей управления. Способ и соответствующая система должны быть простыми в применении и настройке для различных типов существующих или новых ядерных реакторов. Они должны быть способны проводить регулирование или управление в режиме реального времени.
В соответствии с изобретением упомянутые цели достигают с помощью способа по п. 1 формулы изобретения. Соответствующая система управления указана в п. 8.
Таким образом, в пункте 1 формулы изобретения определен способ управления ядерным реактором с водой под давлением,
причем ядерный реактор с водой под давлением содержит активную зону реактора и контур охлаждения активной зоны реактора, в котором находится теплоноситель реактора,
состояние реактора характеризуют рядом измеряемых переменных состояния, а реактивность активной зоны реактора регулируют рядом управляющих переменных, и на нее воздействует отравление реактора,
при этом для заданной зависящей от времени траектории управляющих переменных прогнозируют соответствующие траектории для переменных состояния на основе измеренных текущих значений переменных состояния, заданных или вычисленных значений отравления и уравнения баланса реактивности,
причем способ содержит следующие этапы: этап итеративного рассмотрения большого количества случайно изменяемых возможных траекторий управляющих переменных для будущего временного интервала, предпочтительно намного большего, чем один час, и обычно имеющего порядок величины около 24 часов,
при этом каждой траектории управляющих переменных присваивают показатель добротности на основе таблицы значений, которая содержит значения весовых коэффициентов или штрафов для ряда событий или неблагоприятных состояний активной зоны реактора, которые характеризуют предварительно заданными условиями или значениями управляющих переменных, переменных процесса и/или производными от них переменных,
при этом траектория управляющих переменных выбрана так, чтобы показатель добротности имел локальный экстремум, и
при этом исполнительные механизмы перемещают или устанавливают соответствующим образом.
Дополнительные варианты осуществления и усовершенствования основной концепции указаны в зависимых пунктах формулы изобретения и в последующем описании.
В заявленном способе и соответствующем устройстве/системе (под названием "Регулятор активной зоны" ("Core Governor")) вместо технологии управления используют компьютеризированный расчет вариаций (т.е. поиск максимумов и/или минимумов функционала). В отличие от контроллеров реакторов, основанных на технологии управления, предлагаемый регулятор активной зоны не только генерирует команды управления в реальном времени, но и составляет всесторонний план действий по управлению на следующий большой промежуток времени, предпочтительно на 24 часа, и предпочтительно визуализирует его. Вместо решения амбициозной обратной задачи регулятор активной зоны в соответствии с изобретением решает тривиальную прямую задачу, многократно изменяя план действий по управлению на каждой итерации и ища наилучший план действий, используя показатель добротности на основе заданной таблицы значений. В отличие от технологии управления, компьютеризированный расчет вариаций не имеет ограничений по количеству целей управления, так как его заботой является один показатель добротности, который включает в себя все цели одновременно, независимо от их количества и характера.
В алгоритме расчета используется генератор случайных чисел.
В типичном ядерном реакторе примерами таких противоречивых целей, которые изобретение способно уравновесить и оптимизировать адекватным образом, являются:
- управление осевым смещением (AO);
- минимизация перемещений стержней;
- минимизация потребления борной кислоты;
- минимизация потребления деминерализованной воды;
- компенсация выгорания;
- равномерное выгорание.
Дополнительно изобретение может обеспечить:
- долгосрочное, предпочтительно 24-часовое прогнозирование и отображение всех важных характеристик активной зоны;
- наблюдение и прогнозирование отравлений ксеноном и самарием;
- мониторинг и/или гарантия возможности быстрого увеличения мощности до 100%;
- тривиальная регулировка всех возможных изменений, например, разные нагрузки или перенастройки активной зоны;
- тривиальная параметризация;
- применимость ко всем мыслимым типам атомных электростанций с водой под давлением.
Соответствующие преимущества этого принципиально нового подхода заключаются в следующем:
- безопасность;
- доступность;
- маневренность (гибкость в эксплуатации);
- эффективность планирования;
- прозрачность;
- работоспособность;
- эргономика;
- предсказуемость.
Это позволяет полностью автоматизировать электросетевые услуги, включая усовершенствованное, следующее за нагрузкой, управление активной зоной реактора и другие режимы управления. Однако также поддерживаются полуавтоматические или ручные режимы работы реактора. В частности, движения исполнительного механизма могут выполнять вручную, в полуавтоматическом или в полностью автоматическом режиме.
Предложенный способ требует и обеспечивает выполнение компьютерных вычислений намного быстрее, чем в реальном времени. За доли секунды следует рассчитать ряд желательно 24-часовых траекторий. Мощности современных компьютеров для этого достаточно, так как предложенный алгоритм заботится только о балансе реактивности предпочтительно для каждых, например, 200 мс в интервале времени оптимизации, длительностью предпочтительно 24 часа. Для этого необходима простая арифметика. Пространственное распределение в активной зоне предпочтительно рассматривают в двухточечной модели, поскольку интерес представляет только аксиальный офсет (AO). Двухточечной модели вполне достаточно для данной цели, и для нее требуется очень небольшая вычислительная мощность.
Предложенный способ можно легко адаптировать к различным атомным электростанциям с водой под давлением, поскольку алгоритм как таковой остается неизменным. В принципе, обновлять нужно только параметры алгоритма. Поскольку будут решаться только прямые задачи, все эти параметры являются физическими и хорошо известны для каждого реактора. Фактически, большинство этих параметров являются просто коэффициентами реактивности.
Поведение предложенного алгоритма управления можно изменить простым изменением постоянных значений и функций значений в таблице значений. Новые признаки могут быть внедрены просто путем дополнения таблицы значений. При этом следует дополнить алгоритм показателя добротности. Поскольку показатель добротности - это простая сумма различных вкладов, то это дополнение тривиально.
Эти и другие аспекты изобретения и соответствующие преимущества будут более очевидны из последующих разделов, в которых обсуждают примерные варианты осуществления изобретения со ссылкой на прилагаемые чертежи.
На фиг. 1 приведено схематичное представление ядерного реактора с водой под давлением и архитектура управления им в соответствии с настоящим изобретением.
На фиг. 2 приведено схематичное представление алгоритма управления для функции "Регулятор активной зоны" в соответствии с изобретением.
На фиг. 3 приведена визуализация пространства состояний ядерного реактора с водой под давлением, образованное переменными состояния.
На фиг. 4 приведена визуализация управляющего пространства состояний ядерного реактора с водой под давлением, образованное управляющими переменными.
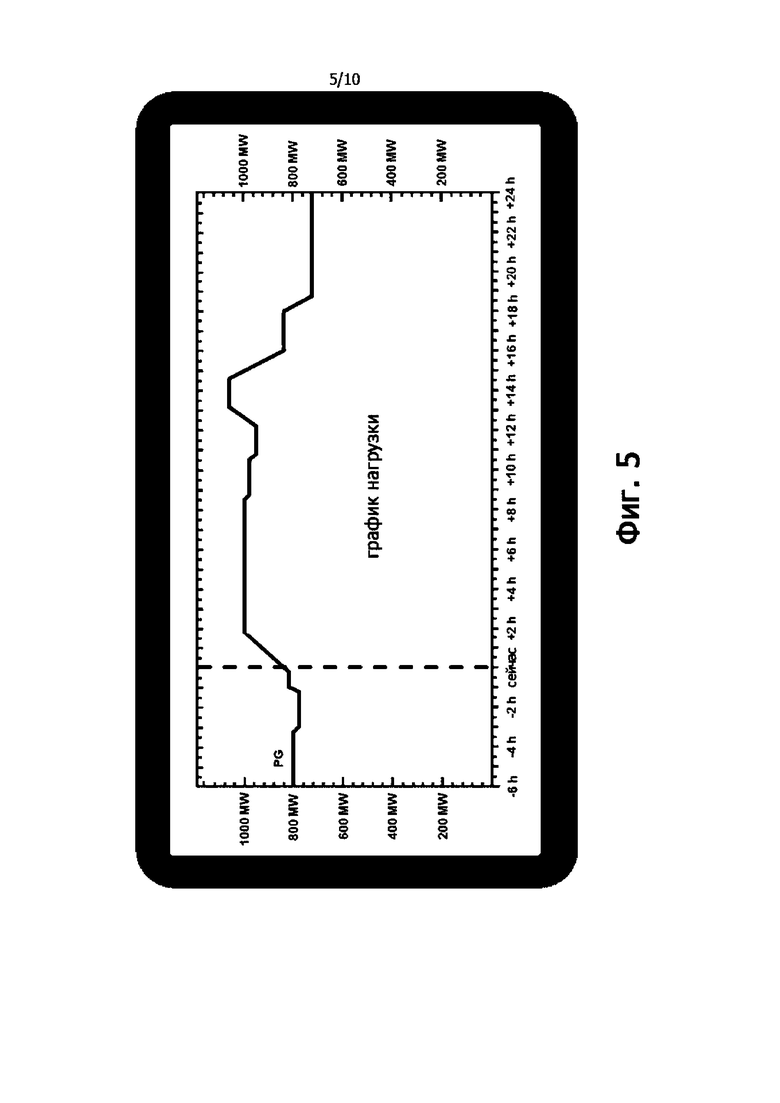
На фиг. 5 приведен схематический вид графика нагрузки для атомной электростанции.
На фиг. 6 показан пример таблицы значений для использования в алгоритме, работающем на "Регуляторе активной зоны" в соответствии с фиг. 2.
На фиг. 7 показан пример функции значения для использования в таблице значений в соответствии с фиг. 6.
На фиг. 8 показан другой пример функции значения для использования в таблице значений в соответствии с фиг. 6.
На фиг. 9 приведен пример выходного экрана, отображаемого на дисплее "Регулятора активной зоны" в соответствии с фиг. 2.
На фиг. 10 приведена блок-схема предпочтительного алгоритма для "Регулятора активной зоны" в соответствии с фиг. 2.
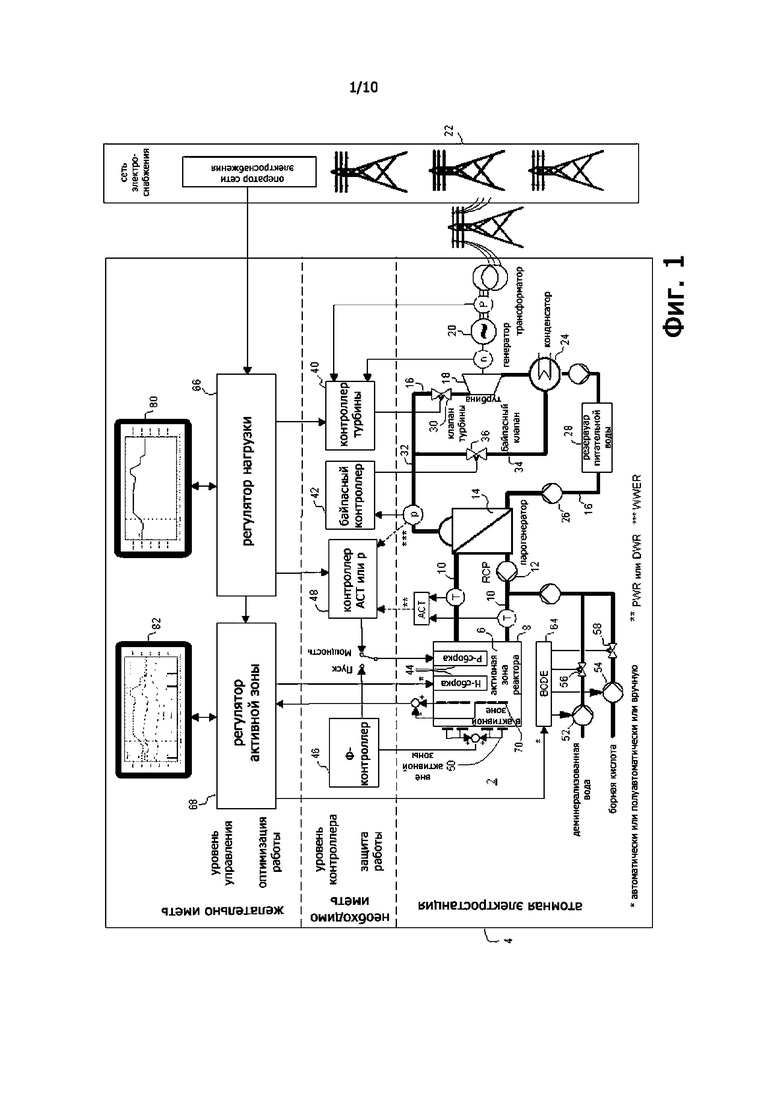
На фиг. 1 приведено упрощенное схематичное представление атомной электростанции 4 с реактором 2 с водой под давлением и архитектура управления им в соответствии с настоящим изобретением. Архитектуру управления также можно назвать архитектурой регулирования, хотя при регулировании активной зоны реактора в соответствии с изобретением не применяют традиционную классическую теорию управления, как будет очевидно из последующего описания.
В примерном варианте осуществления атомная электростанция 4 содержит реактор 2 с водой под давлением (PWR). Он содержит активную зону 6 реактора с делящимся ядерным материалом внутри корпуса 8 высокого давления реактора (RPV). Во время работы ядерное тепло внутри корпуса 8 реактора передается первичной охлаждающей среде (или теплоносителю), циркулирующей в первом охлаждающем контуре 10 под действием движущей силы насоса 12 теплоносителя реактора (RCP). В присоединенном парогенераторе 14 тепло первичной охлаждающей среды передается вторичной охлаждающей среде, циркулирующей во вторичном охлаждающем контуре 16, тем самым испаряя вторичную охлаждающую среду. Затем охлажденная первичная охлаждающая среда снова направляется в активную зону 6 реактора.
Полученный таким образом горячий пар приводит в действие паровую турбину 18, которая соединена с электрическим генератором 20, тем самым вырабатывая электричество, которое подают в соответствующую сеть 22 электроснабжения. После паровой турбины 18 свободный пар конденсируется в конденсаторе 24, и затем его снова подают в качестве питательной воды в парогенератор 14 с помощью насоса 26 питательной воды. Резервуар 28 питательной воды во вторичном охлаждающем контуре 16 может выступать в качестве компенсирующего резервуара.
Расход пара, поступающего в паровую турбину 18, можно регулировать с помощью клапанов 30 турбины (здесь показан только один для простоты - обычно их несколько, расположенных параллельно) в трубопроводе 32 подачи пара. В некоторых особых случаях (запуск станции, отключение турбины, переключение на работу для собственных нужд и т.д.) имеется избыточный пар, который не попадает в паровую турбину 18, а направляется непосредственно в конденсатор 24 через байпасную линию 34, которая включает в себя байпасный клапан 36 (здесь для простоты показан только один - обычно их несколько, расположенных параллельно) для настройки байпасного расхода. Положения клапанов 30 турбины и байпасных клапанов 36 регулируют соответствующей системой управления, содержащей контроллер 40 турбины и байпасный контроллер 42. Измеряемые параметры, которые подают на вход контуров управления, могут включать в себя давление p горячего пара в линии 32 подачи пара, скорость n вращения паровой турбины 18 и/или электрическую мощность P, выдаваемую электрическим генератором 20.
Управление реактором 2 возможно с помощью ряда регулирующих стержней 44, вставляемых в его активную зону 6. Обычно регулирующие стержни в реакторах с водой под давлением (PWR, DWR, WWER и др.) объединены в управляющие сборки ядерного реактора. Стержни одной сборки приводят в движение одним приводным механизмом и перемещают вместе внутри одной топливной сборки. В частности, четыре (PWR, DWR) или шесть (WWER) симметрично расположенных сборок составляют управляющую группу. Группы обычно дополнительно объединяют в две сборки. Меньшую сборку P (от Power) используют для управления мощностью реактора, большая H (от Heavy) зарезервирована для остановки реактора и полностью выведена из активной зоны во время нормальной работы. В некоторых передовых концепциях управления, таких как немецкая и французская, H-сборку также используют для поправки распределения плотности мощности в активной зоне. Для этого H-сборку немного вводят в верхнюю часть активной зоны, и ее могут немного перемещать с помощью так называемого контроллера аксиального офсета (AO) энерговыделения. Помимо обычных поглощающих стержней, некоторые французские реакторы имеют специальные "серые стержни". Поглощающая способность серых стержней меньше, чем у обычных (черных) стержней. Серые стержни имеют только два рабочих положения: полностью выведенное или полностью вставленное, и будут использованы для снижения мощности реактора большими шагами. В примерном варианте осуществления, показанном на фиг. 1 можно увидеть P-сборку и H-сборку.
Обычно соответствующая система управления положением P-сборки содержит контроллер 46 нейтронного потока, также известный как Φ-контроллер, который используют для запуска реактора, и контроллер 48 средней температуры теплоносителя (ACT), отвечающий за работу реактора на мощности. Φ-контроллер полагается на измеренные значения нейтронного потока Φ внутри активной зоны 6 реактора, обычно измеряемые приборами 50 вне активной зоны. Контроллер ACT полагается на измеренные значения температуры первичной охлаждающей среды, в частности, средней температуры (ACT) теплоносителя, полученной из температуры T1 на входе и температуры T2 на выходе из активной зоны 6 реактора. В отличие от PWR и DWR, на электростанции с WWER в этот момент регулируют давление p горячего пара вместо средней температуры ACT теплоносителя реактора. Однако этот факт не оказывает какого-либо дальнейшего влияния на концепцию управления в соответствии с настоящим изобретением.
Кроме того, на реактивность в активной зоне 6 реактора влияет регулирование концентрации бора в первичном контуре 10 охлаждения. С этой целью имеется система подачи борной кислоты, с одной стороны (увеличение концентрации бора), и деминерализованной воды, с другой стороны (уменьшение концентрации бора), присоединенная к первичному контуру охлаждения 10 через так называемую систему (VCS) управления объемом, которая для простоты здесь явно не показана.
Скорости подачи борной кислоты и деминерализованной воды, вместе также известные как BODE, и, таким образом, концентрацию бора в первом контуре охлаждения 10 можно регулировать с помощью соответствующих питающих насосов 52, 54 и регулирующих клапанов 56, 58 в линиях 60, 62 подачи BODE. Подающие насосы 52, 54 и регулирующие клапаны 56, 58 устанавливают с помощью контроллера 64 BODE.
В примерном варианте осуществления, показанном на фиг. 1, вышестоящий модуль управления, называемый "Регулятором нагрузки" 66 (Load Governor), принимает график нагрузки (Load Schedule) от оператора сети, как это показано на экране 80 и на фиг. 5, где график будущей потребности в электроэнергии дан в виде функции времени, обычно на следующие 24 часа с шагом обычно 15 минут. Оператор атомной электростанции имеет возможность редактировать и выдавать этот график нагрузки. Используя выпущенный график нагрузки, регулятор 66 нагрузки предоставляет контроллеру 40 турбины заданное значение электрической мощности в реальном времени. Кроме того, регулятор 66 нагрузки выполняет прямое управление P-сборкой с помощью контроллера 48 ACT (или p).
Соответствующий вышестоящий модуль управления, называемый Регулятором активной зоны 68, получает действующий график нагрузки от регулятора нагрузки 66 и текущую плотность мощности от внутриреакторных измерительных приборов 70. Используя эту информацию и свою собственную информацию о текущем отравлении реактора и его пространственном распределении, полученном из данных о предыдущих значениях мощности, Регулятор активной зоны 68 делает прогноз для всех важных переменных процесса активной зоны на будущее, предпочтительно на следующие 24 часа, как более подробно описано ниже. Эти траектории будут показаны на экране 82 Регулятора активной зоны 68. Исходные точки этих траекторий (t = 0) дают текущие настройки для H-сборки и для контроллера 64 BODE, воздействующего на систему подачи BODE, как описано выше.
С глобальной точки зрения состояние ядерного реактора 2 в варианте осуществления, показанном на фиг. 1 в данный момент времени можно охарактеризовать по существу тремя измеряемыми и независимыми переменными процесса или переменными состояния:
1. энерговыделение (PR),
2. температура теплоносителя реактора (ACT) или, в случае WWER, давление горячего пара (p), и
3. аксиальный офсет (АО) плотности энерговыделения в активной зоне реактора.
При этом, энерговыделение - это тепловая мощность, производимая реакциями деления. Она может быть получена, с одной стороны, из измеренного повышения температуры теплоносителя (разницы между температурой теплоносителя на выходе и на входе реактора) и известного расхода теплоносителя и, с другой стороны, из нейтронного потока, измеренного внутриреакторными детекторами нейтронов.
Средняя температура теплоносителя реактора ACT представляет собой усредненное значение температур теплоносителя на входе и на выходе реактора. В качестве альтернативы, в случае с WWER в качестве независимой переменной процесса вместо температуры теплоносителя первичного контура можно взять давление p во вторичном охлаждающем контуре 16.
Аксиальный офсет AO представляет собой нормированную разницу между энерговыделением верхней и нижней половин активной зоны. Обычно его измеряют внутриреакторным прибором для измерения нейтронного потока. Атомные электростанции, не оснащенные необходимыми внутриреакторными измерительными приборами, используют для этой цели внешнее измерение потока.
Таким образом, состояние ядерного реактора 2 в данный момент времени может быть представлено точкой или вектором состояния в трехмерном пространстве состояний, образованным упомянутыми переменными состояния, как показано на фиг. 3. Тогда изменение во времени переменных состояния представляют траекторией Ts в упомянутом пространстве состояний. Другими словами, траектория Ts содержит координаты состояния реактора в пространстве состояний как функцию времени.
Помимо этих трех независимых переменных состояния, отравление реактора и его пространственное распределение в активной зоне являются важными характеристиками состояния активной зоны реактора, которые вносят значительный вклад в реактивность. В отличие от энерговыделения, температуры теплоносителя и аксиального офсета, отравление реактора нельзя напрямую регулировать с помощью исполнительных механизмов - оно, скорее, является результатом истории эксплуатации активной зоны, в основном за последние 24 часа, и, очевидно, его необходимо принимать во внимание при управлении реактором.
Аналогично, есть три основные управляющие переменные, независимо управляющие состоянием ядерного реактора 2 в варианте осуществления, показанном на фиг. 1:
1. положение P-сборки,
2. концентрация бора в первичном контуре 10 охлаждения и, возможно, серые стержни.
3. положение Н-сборки, если реактор имеет подвижную Н-сборку.
Некоторые специальные французские реакторы также содержат так называемые серые стержни, обладающие меньшим поглощением, чем обычные (черные) стержни. У серых стержней есть только два возможных положения: полностью выведенное или полностью вставленное. Преимущество серых стержней заключается в том, что они не искажают аксиальное распределение плотности энерговыделения и, таким образом, не изменяют аксиальный офсет (OA) в активной зоне реактора, как и борирование/разбавление. Вот почему серые стержни можно рассматривать вместе с борированием/разбавлением как отдельную управляющую переменную.
Концентрацию бора можно регулировать, приводя в действие питающие насосы 52, 54 BODE и регулирующие клапаны 56, 58 с помощью контроллера 64 BODE, как описано выше.
Следовательно, текущее значение управляющих переменных может быть представлено точкой или вектором в трехмерном пространстве управляющих переменных, как показано на фиг. 4. Аналогично вышеприведенному описанию пространства состояний, траектория Ta в этом так называемом управляющем пространстве представляет собой изменение с течением времени управляющих переменных.
В любой заданный момент времени управляющие переменные, в принципе, могут быть установлены на произвольные значения в пределах физически допустимых пределов. Следовательно, траектория Ta в управляющем пространстве может быть выбрана свободно и ограничена только практическими максимальными и минимальными значениями управляющих переменных, а также пределами, задаваемыми системами защиты и ограничений реактора.
Однако траектория Ts в пространстве состояний зависит от траектории Ta управляющих переменных наряду с текущим отравлением реактора и текущим отводом тепла вторичным контуром охлаждения. Таким образом, траектория Ts "автоматически самокорректируется" из-за внутренне присущих физических процессов реактора. Из-за внутренней нелинейности физических процессов управления зависимость может быть сложной и включать в себя отклики с задержкой по времени, в основном из-за сложных эффектов отравления. В этом смысле управляющее пространство можно рассматривать как "первичное" пространство, а пространство состояний можно рассматривать как зависимое "вторичное" пространство.
Тем не менее, простое и хорошо известное уравнение баланса реактивности (при постоянной мощности реактора Σρ = 0) позволяет прогнозировать траектории Ts переменных состояния ядерного реактора на основе заданных траекторий Ta управляющих переменных для определенной продолжительности времени, например для следующих 24 часа. Другими словами, для данной траектории Ta в управляющем пространстве соответствующую траекторию Ts в пространстве состояний можно, в принципе, предсказать с помощью простого модуля прогнозирования на основе уравнения баланса реактивности.
Помимо хорошо известного управления средней температурой теплоносителя (ACT), задача управления реактором включает в себя множество других аспектов, таких как эксплуатационная безопасность, допускающая работу только в заданных пределах, равномерное выгорание, компенсация выгорания, компенсация отравления, равномерное распределение плотности энерговыделения, поддержка гибкого производства электроэнергии, эксплуатационная экономичность и т.д. Поэтому, количество целей управления обычно намного больше, чем количество управляющих переменных. Этот аспект в связи с уже упомянутой нелинейностью и сложной динамикой управляемой системы, а также огромной шириной различных временных масштабов работы, начиная от 10 мкс для мгновенных нейтронов, секунд для запаздывающих нейтронов и процессов теплопередачи, десятков часов для эффектов отравления до нескольких лет для истощения топлива, делает традиционную теорию управления неприемлемой. Даже специальные способы, такие как MIMO (Многоканальный вход - многоканальный выход, (Multiple-Input Multiple-Output)), не подходят.
Чтобы преодолеть вышеупомянутые проблемы, в настоящем изобретении предложен совершенно другой подход, основанный на представлении траектории, описанном выше, с использованием численного расчета вариаций.
Таким образом, схема управления в соответствии с изобретением содержит следующее: итеративно рассматривают большое количество случайно изменяемых возможных траекторий Ta ряда управляющих переменных для предварительно заданного будущего большого временного интервала (порядка 24 часов), предпочтительно при заданном графике мощности реактора, в котором каждой траектории Ta управляющих переменных присвоен показатель Σ добротности на основе таблицы значений, которая содержит весовые или штрафные значения для ряда событий или неблагоприятных состояний активной зоны реактора, которые характеризуются предварительно заданными условиями или значениями управляющих переменных, переменных процесса и/или переменных, производных от них. Затем, фактическую траекторию Ta управляющих переменных, используемую для настройки соответствующих исполнительных механизмов, выбирают так, чтобы показатель Σ добротности имел локальный экстремум.
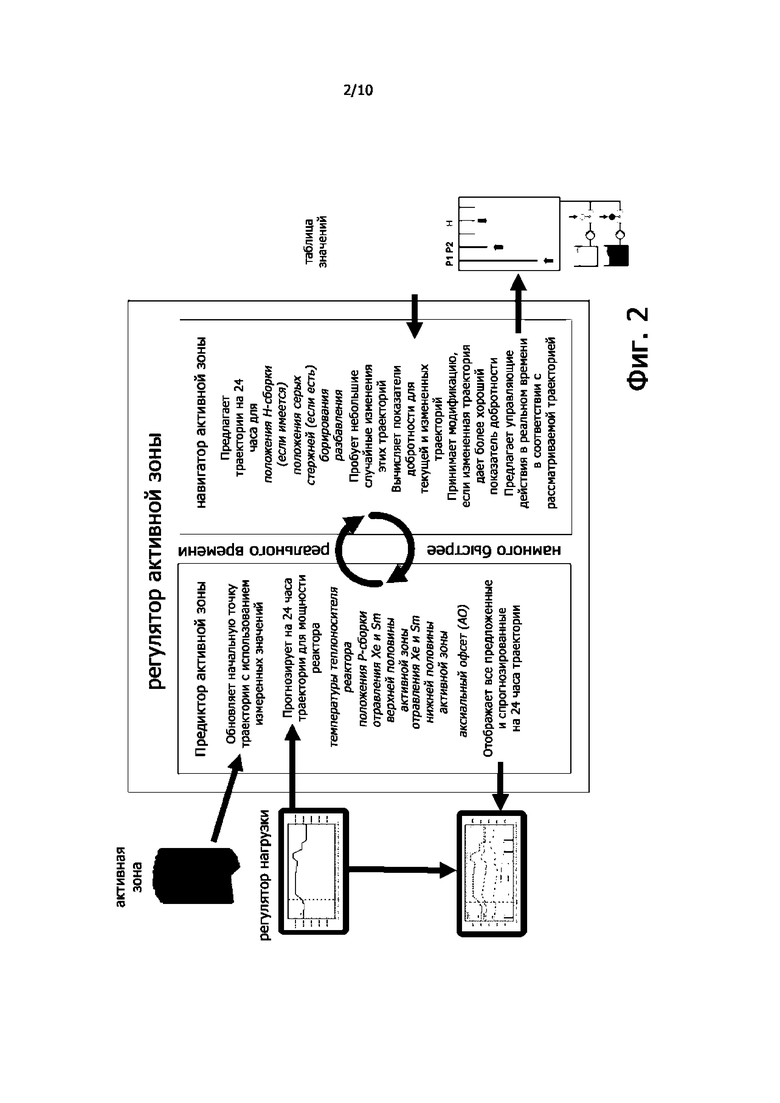
Этот общий принцип работы регулятора 68 активной зоны в соответствии с настоящим изобретением схематично показан на фиг. 2 для настоящего варианта осуществления ядерного реактора 2, показанного на фиг. 1, а на фиг. 10 показан предпочтительный алгоритм для регулятора 68 активной зоны.
Регулятор 68 активной зоны содержит модуль, называемый предиктором активной зоны (Core Predictor), который для заданного набора текущих значений переменных состояния, заданного графика нагрузки для электрической мощности на следующие 24 часа (полученного от регулятора 66 нагрузки (Load Governor)) и на траекториях H-сборки (предложенных навигатором активной зоны (Core Navigator)) прогнозирует траектории Ts переменных состояния и, возможно, других переменных, полученных из них, для заданного будущего периода времени, например, для следующих 24 часов. В частности, помимо уже упомянутых переменных состояния, тепловой мощности реактора PR, аксиального офсета AO и температуры теплоносителя реактора ACT, можно вывести и спрогнозировать изменение во времени других переменных. Используя уравнение баланса реактивности, можно спрогнозировать траекторию P-сборки. Кроме того, предиктор активной зоны предсказывает интегральную концентрацию и пространственное распределение отравляющих продуктов деления, таких как ксенон (Xe) и самарий (Sm), в активной зоне 6 реактора, которые существенно влияют на реактивность активной зоны реактора. Таким образом, предиктор активной зоны выводит соответствующую траекторию Ts переменных состояния и положение P-сборки исходя из заданного графика нагрузки, рассчитанного отравления и предлагаемых траекторий Ta для медленных воздействующих объектов, таких как концентрация бора и положения подвижной H-сборки (если имеется) и серых стержней (если имеются).
Кроме того, регулятор 68 активной зоны содержит модуль, называемый навигатором активной зоны (Core Navigator). Навигатор активной зоны отвечает за предложение и оптимизацию траекторий медленных исполнительных органов: концентрации бора, H-сборки (если имеется) и серых стержней (если есть), имеющих определенную степень свободы.
Навигатор активной зоны может оценить текущую траекторию, присвоив ей отдельный показатель Σ добротности, учитывая текущую траекторию Ta управляющих переменных и соответствующую траекторию Ts переменных состояния с учетом отравления реактора. Это присвоение основано на таблице значений, пример которой показан на фиг. 6. Таблица значений содержит значения весовых коэффициентов или штрафов для ряда событий или неблагоприятных состояний активной зоны реактора, которые характеризуются предварительно заданными условиями или значениями управляющих переменных, переменных процесса и/или производных от них переменных, В этом контексте термины "состояние" или "значение" следует понимать в широком смысле.
Для ясности и наглядности соответствующее значение штрафа, скалярная величина, может быть задано в денежном выражении, например, в виде цены в евро (€) (фиг. 6). В частности, количество перемещений сборки должно быть минимизировано, и, таким образом, каждому шагу сборки может быть присвоено определенное значение. Аналогично, борированию и разбавлению системой BODE присваивают штрафные значения. Что еще более важно, определенные параметры или переменные, получаемые из переменных состояния и/или управляющих переменных, не должны превышать заданные диапазоны (минимальные и/или максимальные значения, задаваемые системами защиты реактора и ограничения мощности реактора) по причинам эксплуатационной безопасности. Следовательно, за переход заданных границ или (предварительных) пределов (которые могут регулироваться динамически) и аналогичные события назначают сравнительно высокие штрафные значения.
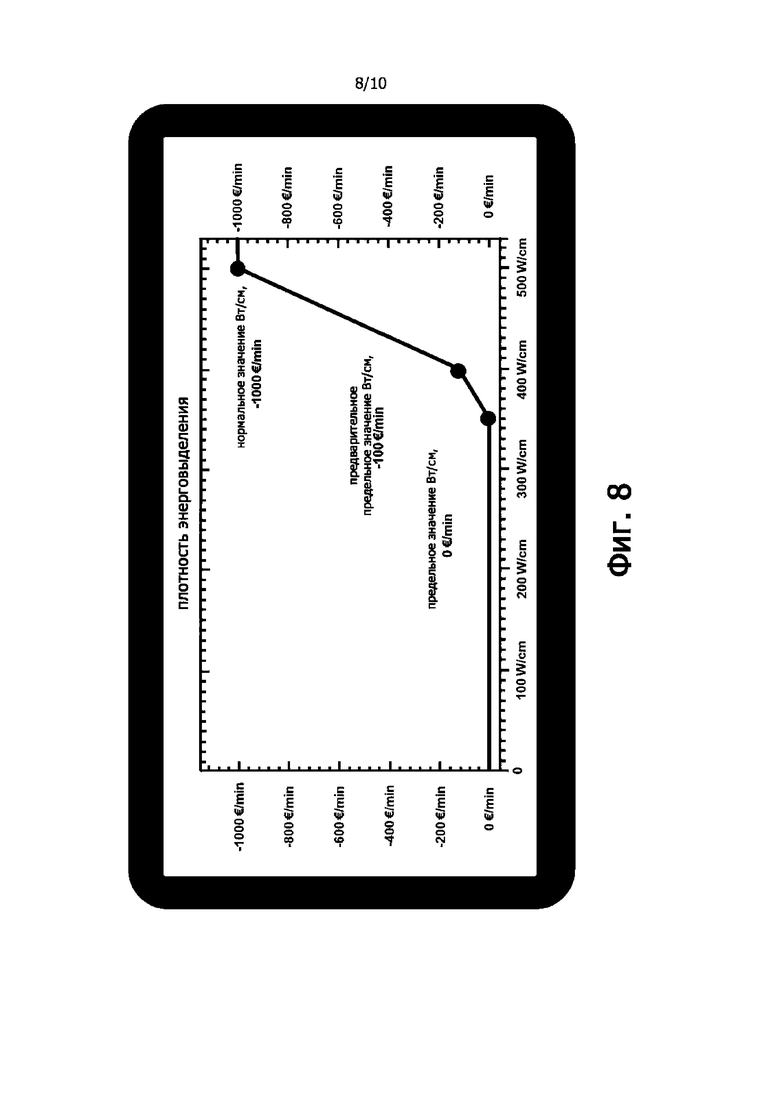
На фиг. 7 и 8 показаны некоторые примеры таких предварительно заданных условий. На фиг. 7 показан штраф за большой аксиальный офсет АО: значение штрафа является предварительно установленной функцией АО. Вершины могут быть заданы с помощью клавиатуры и/или мыши пульта управления. На фиг. 8 показан штраф за большую плотность энерговыделения. Вершины здесь могут быть заданы вручную, или их могут постоянно получать от системы ограничения мощности реактора. Отдельные вклады в показатель добротности также могут зависеть от динамических ограничений, создаваемых системой ограничения мощности реактора. Траектории для таких динамических ограничений могут быть рассчитаны с помощью предиктора активной зоны.
Конечно, данный список штрафных значений, показанный на фиг. 6, и штрафных функций, показанных на фиг. 7 и 8, приведены только в качестве примера. В общем список может быть расширен и/или изменен. В этом случае алгоритм показателя добротности также необходимо адаптировать. Поскольку показатель Σ добротности (общая цена) предпочтительно представляет собой простую сумму отдельных штрафных значений (индивидуальных цен), такая адаптация тривиальна.
Навигатор активной зоны изменяет траектории для борирования/разбавления и циклически перемещает H-сборку (если имеется) и серые стержни (если имеются) с использованием генератора случайных импульсов. Поскольку борирование и разбавление, а также перемещения стержней являются дискретными событиями (см. фиг. 9), их модификации могут выглядеть как сдвиг во времени фронтов "ВКЛ" и "ВЫКЛ" этих действий, а также случайное изменение соответствующих амплитуд. Навигатор также может попытаться удалить какое-то действие или создать новое, разделить существующее действие на два действия меньшей амплитуды или продолжительности, разделенных определенным промежутком времени, или объединить два соседних действия в одно. В каждом таком итерационном цикле предиктор активной зоны соответствующим образом корректирует траекторию P-сборки и рассчитывает траектории Ts для переменных состояния реактора. Опять же, на каждой итерации навигатор активной зоны вычисляет и присваивает один показатель Σ добротности измененной таким образом траектории. Навигатор активной зоны принимает модификацию, если измененная траектория дает лучший показатель Σ добротности, чем текущая. В этом случае модифицированные траектории заменяют текущие. В противном случае модификацию отбрасывают и пробуют новое случайное изменение текущей траектории.
Вообще говоря, фактические траектории для борирования/разбавления и перемещения H-сборки (если имеется) и серых стержней (если имеются) выбирают так, чтобы показатель Σ добротности имел локальный экстремум. Этот алгоритм оптимизации все время циклически работает в фоновом режиме, совершая тысячи итераций в секунду, и его отображают для оператора на экране 82 регулятора 68 активной зоны в виде непрерывно медленно меняющегося изображения (фиг. 9).
Параллельно с быстрым процессом оптимизации, описанным выше, и работающим с максимально возможной скоростью в фоновом режиме, выполняют так называемый процесс в реальном времени. Процесс в реальном времени выполняют предпочтительно с шагом по времени, равным 200 мс, и он сдвигает все траектории на экране 82 оператора в соответствии с фиг. 9 влево. Каждые 200 мс все траектории сдвигают на 200 мс влево, при этом шкала времени на горизонтальной оси остается неподвижной. Течение времени представляют для оператора в виде медленного непрерывного перемещения всех траекторий влево. Благодаря этому медленному смещению действия, такие как борирование/разбавление, а также перемещения H-сборки (если имеется) и серых стержней (если имеются), предложенные навигатором активной зоны, достигнут линии "сейчас" в некоторый момент времени. В этот момент соответствующие действия будут предложены к выполнению. Выполнение может быть осуществлено вручную, полуавтоматически (кнопка разрешения) или полностью автоматически. Одновременно будут обновлены начальные точки (t = 0) всех траекторий с использованием измеренных значений мощности реактора PR, температуры теплоносителя ACT и аксиального офсета AO. Сегмент экрана слева от линии "сейчас" показывает измеренные значения из прошлого. Если в ручном или полуавтоматическом режиме предложенные действия будут проигнорированы оператором, то предиктор активной зоны оперативно обновит все траектории соответственно, для этого достаточно стандартного алгоритма, описанного выше, никакого специального алгоритма не требуется. Аналогично, график загрузки может быть обновлен в любое время оператором сети или оператором электростанции. Описанного выше алгоритма достаточно, чтобы справиться с такой повторной отправкой, никаких дополнительных алгоритмов не требуется. То же касается и возможного ручного изменения таблицы значений во время работы; описанного выше алгоритма достаточно, чтобы справиться с таким изменением.
Подводя итог, вместо попытки решить амбициозную и математически сверхдетерминированную задачу управления, заключающуюся в поиске управляющего воздействия, которое переводит ядерный реактор из состояния A в состояние B при различных ограничениях (обратная задача), способ в соответствии с изобретением многократно повторяет соответствующую прямую задачу, пробуя случайно модифицированные управляющие воздействия и выбирая то, которому присвоена наивысшая/наименьшая (в зависимости от определения и знака) добротность.
Другими словами, регулятор 68 активной зоны рассматривает возможные траектории Ta управляющих переменных (таких как перемещение стержней, борирование и разбавление) для заданного периода времени оптимизации, например, для следующих 24 часов, и вычисляет показатель Σ добротности для каждой возможной траектории Ta. Изменяя и повторяя траектории Ta, регулятор 68 активной зоны ищет наилучшую траекторию Ta, дающую наивысший/самый низкий показатель Σ добротности, отображает эту наилучшую траекторию Ta предпочтительно вместе с соответствующей траекторией Ts состояния, и предлагает управляющие действия в реальном времени. Таким образом, показатель Σ добротности можно рассматривать как количественную общую оценку недостатков в совокупности, автоматически взвешивающую или уравновешивающую их. Принцип работы относится к области искусственного интеллекта и аналогичен принципу работы уличных навигаторов или шахматных компьютеров.
Систему предпочтительно дополняют подходящими устройствами ввода и вывода. Пример экрана вывода регулятора 68 активной зоны, показанный на фиг. 9, отображает траектории Ts для переменных состояния, предсказанных на следующие 24 часа с помощью предиктора активной зоны, и траектории Ta для исполнительных органов, предложенные навигатором активной зоны.
В следующем разделе для конкретного варианта осуществления изобретения на основе фиг. 1 и 2 раскрыты некоторые подробности реализации, которые также охватывают инициализацию системы.
Предпочтительный алгоритм показан на фиг. 10.
1. Прогноз начинают с графика нагрузки, показанного на фиг. 5, в котором приведена электрическая мощность как функция времени, предпочтительно для следующих 24 часов. График нагрузки поступает от оператора 22 сети, и его сохраняют в регуляторе 66 нагрузки. В любой момент график нагрузки может быть повторно отправлен оператором сети, после того, как оператор электростанции внесет возможные изменения, он будет действителен для работы. Если оператор сети не предоставляет оператору электростанции график нагрузки, то оператор электростанции может составить свой собственный "наилучший оценочный план". Пригоден даже очень приблизительный план относительно того, будет ли электрическая мощность уменьшаться, увеличиваться или оставаться постоянной в следующие 24 часа.
2. Используя график нагрузки и принимая во внимание эффективность 



3. Модуль 96 прогнозирования вычисляет траекторию энерговыделения и число делений в единицу времени: 

4. Используя траекторию числа делений в единицу времени, модуль 98 вычисляет траектории для концентрации Xe и Sm и их реактивность 
5. Используя траектории для мощностной реактивности 


6. Если некоторые части рассчитанной таким образом траектории P-сборки выходят за диапазон, допустимый системой ограничения введения стержней (для будущего периода времени следует использовать прогнозируемые траектории для пределов), то модуль 104 заменяет перемещение стержня борированием/разбавлением или введением/выводом серых стержней для соответствующих промежутков времени с использованием уравнения баланса реактивности 
7. На основе траекторий тепловой мощности 



8. Используя первое приближение для траектории аксиального офсета AO, рассчитанной модулем 100, модуль 102 навигатора активной зоны делает первое предложение для траектории H-сборки. Это первое приближение нужно только для инициализации траекторий. При дальнейшей циклической работе этот промежуточный расчет будет пропущен.
9. Модуль 104 обновляет траекторию для борирования, разбавления и введения серых стержней с учетом первого приближения траектории H-сборки, рассчитанной модулем 102. Это обновление нужно только для инициализации траекторий. При дальнейшей циклической работе этот промежуточный расчет будет пропущен.
10. На основе траекторий тепловой мощности 



Теперь все траектории инициализированы, можно начинать процесс модификации. Первая процедура модификации - это обновление до текущего времени.
1. В каждом цикле обновления длительностью предпочтительно 200 мс все траектории будут сдвинуты на 200 мс влево. Источники измеряемых переменных процесса и управляющих переменных будут обновлены в соответствии с текущими измеренными значениями.
2. Модули 90, 92, 96, 98, 94 и 106 будут вызывать для обновления соответствующих траекторий в соответствии с текущими измеряемыми параметрами процесса и положением P-сборки.
Вторая процедура модификации направлена на оптимизацию траекторий для H-сборки, борирования, разбавления и серых стержней и постоянно работает в фоновом режиме. Это быстрая циклическая процедура, не работающая в режиме реального времени, работающая с максимально возможной скоростью, предпочтительно 100 циклов оптимизации каждую секунду.
1. Модуль 108 навигатора активной зоны выполняет небольшие случайные модификации траекторий H-сборки, борирования, разбавления и серых стержней. Поскольку борирование и разбавление, а также перемещения стержней являются дискретными событиями (см. фиг. 9), их модификации могут выглядеть как случайный сдвиг во времени фронтов "ВКЛ" и "ВЫКЛ" этих действий, а также случайное изменение соответствующих амплитуд. Навигатор также может попытаться удалить какое-то действие или создать новое действие, разделить существующее действие на два действия меньшей амплитуды или продолжительности, разделенных определенным промежутком времени, или объединить два соседних действия в одно.
2. Модуль 94 обновляет траекторию P-сборки, используя уравнение баланса реактивности 


3. Модуль 110 вычисляет показатели добротности для текущих и модифицированных наборов траекторий, используя таблицу значений, показанную на фиг. 6. Если измененная траектория дает более хороший показатель добротности, чем текущая, то текущая траектория будет заменена на модифицированную, в противном случае модификация будет отброшена. После этого будет начата новая попытка модификации.
Действие по корректировке запланированных действий приводит к дискретному изменению графика загрузки. Модуль 90 может медленно и непрерывно изменять свою текущую эффективную траекторию электрической мощности на новую. Такое преобразование может занять несколько минут, начиная с текущей траектории и непрерывно изменяя ее в соответствии с новым запросом регулятора нагрузки. Это медленное преобразование позволяет обеим циклическим процедурам преобразовывать все траектории без введения дополнительных специальных алгоритмов.
Существует также альтернативная возможность инициализации траекторий. Сразу после включения или сброса регулятора 68 активной зоны будет принято устойчивое состояние для всех траекторий для следующих 24 часов (постоянные траектории в соответствии с текущим измеренным состоянием и действующими переменными), и будут запущены обе циклические процедуры. Медленное изменение модулем 90 эффективной траектории для электрической мощности при выполнении циклических процедур изменит все траектории. В этом случае траектории для H-сборки, борирования, разбавления и серых стержней не будут явно инициализированы, а будут созданы в бесчисленных случайных действиях модуля 108. В этом случае модули 100, 102 и 104 можно отбросить.
Из-за времени работы и, как следствие, перемещения всех траекторий влево (фиг. 9), такие действия, как борирование/разбавление, а также перемещения H-сборки (если имеется) и серых стержней (если есть), предложенные навигатором активной зоны, в некоторый момент времени достигнут линии "сейчас". В этот момент будут предложены к выполнению соответствующие действия. Выполнение может быть осуществлено вручную, полуавтоматически (кнопка разрешения) или полностью автоматически.
Если в ручном или полуавтоматическом режиме предложенные действия будут отвергнуты оператором, то предиктор активной зоны быстро обновит все траектории соответственно, для этого достаточно стандартного алгоритма, описанного выше, никакого специального алгоритма не требуется.
Рассчитанное таким образом общее планирование на следующие 24 часа, включая все траектории переменных состояния, действующих переменных и общий показатель добротности, все время отображают на экране 82 регулятора 68 активной зоны. Картинка медленно ползет влево и постоянно корректируется. Также будут отображать показатель добротности, который свидетельствует о продолжающемся улучшении.
Помимо своей основной функции, регулятор активной зоны позволяет изучить возможности электростанции касательно гибкой работы на ближайшие 24 часа. Для этого можно для пробы изменить график нагрузки на экране регулятора нагрузки, перемещая мышью вершины графика. Через несколько секунд или минут, в зависимости от производительности компьютера, можно наблюдать влияние этого экспериментального изменения на все траектории, описывающие все переменные состояния.
Список ссылочных позиций
2 - реактор с водой под давлением (PWR)
4 - атомная электростанция
6 - активная зона реактора
8 - корпус реактора
10 - первичный контур охлаждения
12 - насос теплоносителя реактора
14 - парогенератор
16 - вторичный контур охлаждения
18 - паровая турбина
20 - электрогенератор
22 - сеть электроснабжения
24 - конденсатор
26 - насос питательной воды
28 - резервуар питательной воды
30 - клапан турбины
32 - линия подачи пара
34 - байпасная линия
36 - байпасный клапан
40 - контроллер турбины
42 - байпасный контроллер
44 - регулирующие стержни
46 - контроллер нейтронного потока
48 - контроллер средней температуры охлаждения (PWR, DWR) или давления горячего пара (WWER)
50 - измерительные приборы вне активной зоны
52 - питающий насос
54 - питающий насос
56 - регулирующий клапан
58 - регулирующий клапан
64 - контроллер BODE
66 - регулятор нагрузки
68 - регулятор активной зоны
70 - внутриреакторные измерительные приборы
80 - экран регулятора нагрузки
82 - экран регулятора активной зоны
90 - модуль прогнозирования тепловой мощности реактора
92 - модуль прогнозирования мощностной (допплеровской) реактивности
94 - модуль прогнозирования средней температуры теплоносителя и положения P-сборки
96 - модуль прогнозирования энерговыделения
98 - модуль прогнозирования отравления реактора (Xe, Sm)
100 - первый модуль прогнозирования плотности энерговыделения и плотности отравляющих продуктов деления в активной зоне реактора
102 - модуль навигатора для первого предложения положения H-сборки
104 - модуль навигатора для BODE и серых стержней
106 - второй модуль прогнозирования плотности энерговыделения и плотности отравляющих продуктов деления в активной зоне реактора
108 - модуль навигатора, рандомизирующий траектории для H-сборки, BODE и серых стержней
110 - модуль навигатора, вычисляющий показатель добротности
ACT - средняя температура теплоносителя
AO - аксиальный офсет
BODE - БОрная кислота/ДЕминерализованная вода
DWR - DruckWasserReaktor (немецкий) (реактор на воде под давлением)
PR - мощность реактора
PWR - реактор с водой под давлением
Ta - траектория управляющих переменных
Ts - траектория переменных состояния
WWER - водо-водяной энергетический реактор (советский PWR)
Σ - показатель добротности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АКСИАЛЬНЫМ ЭНЕРГОРАСПРЕДЕЛЕНИЕМ ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2030800C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ С РЕАКТОРОМ ВОДЯНОГО ТИПА ПРИ ИЗМЕНЕНИИ МОЩНОСТИ РЕАКТОРА ИЛИ ВНЕШНЕЙ НАГРУЗКИ | 2011 |
|
RU2470391C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА И СООТВЕТСТВУЮЩИЙ ЯДЕРНЫЙ РЕАКТОР | 2019 |
|
RU2794140C2 |
| Способ управления и защиты ядерного реактора на быстрых нейтронах и система для его реализации | 2022 |
|
RU2798480C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 1996 |
|
RU2084974C1 |
| СИСТЕМА КОНТРОЛЯ НЕЙТРОННОГО ПОТОКА ЯДЕРНОГО РЕАКТОРА | 2006 |
|
RU2310248C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2011 |
|
RU2470392C1 |
| СПОСОБ УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2000 |
|
RU2190267C2 |
| СПОСОБ РАБОТЫ ЯДЕРНОГО РЕАКТОРА С ВЫЧИСЛЕНИЕМ В РЕЖИМЕ ОН-ЛАЙН КОЭФФИЦИЕНТА ЗАПАСА ДО КРИЗИСА ТЕПЛООБМЕНА | 2019 |
|
RU2808104C2 |
| ГОРИЗОНТАЛЬНЫЙ РЕАКТОР С ПЕРЕМЕЩАЕМЫМ ОТРАЖАТЕЛЕМ НЕЙТРОНОВ И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2013 |
|
RU2524397C1 |






Изобретение относится к средствам управления ядерным реактором (2) с водой под давлением, содержащим активную зону (6) реактора и контур (10) охлаждения активной зоны (6) реактора, в котором находится теплоноситель реактора. Состояние реактора характеризуется рядом измеряемых переменных состояния, а реактивность активной зоны реактора регулируют рядом управляющих переменных и воздействуют на нее путем отравления реактора. Для заданной зависящей от времени траектории (Ta) управляющих переменных прогнозируют соответствующие траектории (Ts) для переменных состояния на основе измеренных текущих значений переменных состояния, вычисленных значений отравления и уравнения баланса реактивности. Способ включает итеративное рассмотрение большого количества случайным образом изменяемых возможных траекторий (Ta) управляющих переменных для будущего временного интервала. Каждой траектории (Ta) управляющих переменных присваивают показатель (Σ) добротности с учетом значений весовых коэффициентов или штрафов для ряда событий. Траекторию (Ta) управляющих переменных выбирают так, чтобы показатель (Σ) добротности имел локальный экстремум; и перемещают соответствующим образом соответствующие исполнительные органы. Техническим результатом является возможность одновременно учитывать и балансировать большое число целей управления. 2 н. и 6 з.п. ф-лы, 10 ил.
1. Способ управления ядерным реактором (2) с водой под давлением, содержащим активную зону (6) реактора и контур (10) охлаждения активной зоны (6) реактора, в котором находится теплоноситель реактора,
состояние реактора характеризуется рядом измеряемых переменных состояния, и реактивность активной зоны реактора регулируют посредством ряда управляющих переменных и воздействия путем отравления реактора,
причем для заданной зависящей от времени траектории (Ta) управляющих переменных прогнозируют соответствующие траектории (Ts) переменных состояния на основе измеренных текущих значений переменных состояния, вычисленных значений отравления и уравнения баланса реактивности,
при этом способ включает в себя получение графика нагрузки, задающего электрическую мощность в зависимости от времени;
итеративное рассмотрение большого количества случайным образом изменяемых возможных траекторий (Ta) управляющих переменных для будущего временного интервала,
причем указанное изменение траекторий (Ta) управляющих переменных реализуют при ограничивающем условии заданного графика нагрузки для мощности реактора,
каждой траектории (Ta) управляющих переменных присваивают показатель (Σ) добротности на основе таблицы значений, которая содержит значения весовых коэффициентов или штрафов для ряда событий или неблагоприятных состояний активной зоны реактора, которые характеризуются предварительно заданными условиями или значениями управляющих переменных, технологических переменных и/или переменных, производных от них,
выбирают траекторию (Ta) управляющих переменных таким образом, чтобы показатель (Σ) добротности имел локальный экстремум, и
перемещают соответствующим образом соответствующие исполнительные органы.
2. Способ по п. 1, в котором технологические переменные содержат одно или несколько из следующих параметров: тепловая мощность (PR) реактора, температура (ACT) теплоносителя реактора, давление (p) горячего пара и/или аксиальный офсет (AO) плотности энерговыделения активной зоны реактора или эквивалентные величины.
3. Способ по п. 1 или 2, в котором ядерный реактор (2) с водой под давлением также содержит множество регулирующих стержней (44), которые вставляют в активную зону (6) реактора, предпочтительно собранные в регулирующие сборки, и систему борирования и разбавления для задания концентрации бора в теплоносителе реактора, при этом управляющие переменные характеризуют положения или перемещения регулирующих стержней и/или борирование и/или разбавление.
4. Способ по любому из предыдущих пунктов, в котором изменение траекторий (Ta) управляющих переменных реализуют также при ограничивающем условии заданного отравления активной зоны реактора.
5. Способ по любому из предыдущих пунктов, в котором измеренные текущие значения переменных состояния обновляют в режиме реального времени.
6. Способ по любому из предыдущих пунктов, в котором в алгоритме расчета используют генератор случайных чисел.
7. Способ по любому из предыдущих пунктов, в котором рассматриваемый будущий временной интервал намного больше одного часа, обычно составляет величину порядка 24 часов.
8. Система управления ядерным реактором с компьютеризированным модулем управления для осуществления способа по любому из предыдущих пунктов, в которой для управления соответствующими исполнительными органами используется рассчитанная оптимальная траектория (Ta) управляющих переменных, при этом указанный модуль управления содержит регулятор (66) нагрузки, выполненный с возможностью принимать график нагрузки, и регулятор (68) активной зоны, выполненный с возможностью выполнения прогноза для всех важных переменных процесса активной зоны.
| US 20080154838 A1, 26.06.2008 | |||
| МАНЕВРЕННАЯ АТОМНАЯ ЭЛЕКТРОСТАНЦИЯ | 2010 |
|
RU2453938C1 |
| Аверьянова С.П | |||
| и др | |||
| Метод офсет-мощностной фазовой диаграммы для управления энерговыделением реактора | |||
| Журн | |||
| Атомная энергия | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Т | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| С | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| Аверьянова С.П | |||
| и др | |||
| КИНЕМАТОГРАФИЧЕСКИЙ АППАРАТ ДЛЯ ПОЛУЧЕНИЯ И ПРОЕКТИРОВАНИЯ СНИМКОВ В НАТУРАЛЬНЫХ ЦВЕТАХ | 1922 |
|
SU1200A1 |
| Журн | |||
| Атомная энергия | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Т | |||

