Изобретение относится к устройствам, обеспечивающим проведение вычислительных процессов и взаимосвязь информационно-управляющих систем ракетно-космической техники, особенностью которых является обеспечение работоспособности в экстремальных условиях в реальном масштабе времени.
Введение в состав системы управления специального вычислителя, состоящего из идентифицирующей и прогнозирующей искусственной нейронной сети (ИНС), специального счетчика для фиксирования тактов работы бортовой вычислительной машины (БЦВМ), специального запоминающего устройства на накопителе на магнитном диске (НМД) позволяет после прерываний работы системы управления (вызванных отказами, сбоями) восстановить пропущенные значения вектора кажущейся скорости (ВКС), что позволяет сохранить точность кинематических параметров движения, необходимых для решении бортовой навигационной задачи и оптимизировать задействование программно-алгоритмических и вычислительных ресурсов в условиях вынужденного прерывания работы системы управления.
Известные способы восстановления (прогнозирования) временного ряда, имеющие четкую математическую формализацию (интерполяция, аппроксимация с последующей экстраполяцией), авторегрессионные модели со скользящим средним позволяют работать с временными рядами. Однако при увеличении периода прерывания и неизвестной заранее последовательности прерываний приводят к существенному увеличению задействования вычислительных ресурсов БЦВМ, а также к возникновению неконтролируемой ошибки на интервале прогнозирования, что приводит к дополнительным погрешностям в расчетах навигационных параметров движения или к их потери.
Известен способ нейросетевого прогнозирования изменения значений функции с ее предварительной вейвлет-обработкой и устройство его осуществления [1]. При прогнозировании изменений значений временных рядов данных или дискретных отсчетов непрерывных функциональных зависимостей сигналы подаются на входы нейронной сети, построенной по схеме многослойного персептрона прямого распространения, с последующей итерационной процедурой обучения нейронной сети, в ходе которой осуществляется настройка весовых или синаптических коэффициентов по критерию минимизации ошибок прогноза, формируемых в блоках вычисления ошибок прогноза.
С применением данного способа прогнозирование может быть осуществлено от одного и до десяти периодов временного ряда, в то время как продолжительность прерывания работы для восстановления ВКС может составить значительно больший период. Предложенная в данном способе архитектура ИНС и принцип прогнозирования изменения значений функции с ее предварительной вейвлет-обработкой не позволяет осуществлять прогноз в оперативном (online) режиме.
Известен способ адаптивного прогнозирования остаточного ресурса эксплуатации сложных объектов и устройство для его осуществления [2]. Функцию адаптивного прогнозирования осуществляют многослойная нейронная сеть с обучением по методу обратного распространения ошибки для аппроксимации значений, а экстраполяцию выполняет трехслойная ИНС прямого распространения с функцией активации сигмоид.
К недостаткам способа следует отнести сложность реализации предложенного способа, которая заключается в эволюционном поиске с кластеризацией признаков при формировании исходной выборки для обучения аппроксимирующей нейронной сети. Вместе с этим, способ адаптивного прогнозирования достаточно хорошо определяет тенденцию временного ряда, а экстраполирует ряд с ошибками (среднеквадратичное отклонение составляет 3.01).
Наиболее близкой к предлагаемому изобретению является способ и система прогнозирования временного ряда с использованием искусственной нейронной сети и состоит из: способа создания продленных рядов метаданных, способа шифрования данных для построения оптимальных выборок обучения ИНС, способа и подсистемы обучения искусственной нейронной сети, подсистемы работы ИНС в режиме прогноза, способа построения прогноза с использованием ИНС [3].
Основной недостаток данного способа и системы заключается в прогнозировании характеристик временного ряда с заранее известными длинами отрезков и известной дискретностью. В случае вынужденного прерывания работы БЦВМ период прерывания и последовательность прерываний является стохастическими.
Известно устройство системы автоматического управления [4] летательного аппарата, которое является в качестве ближайшего аналога. Где информация о параметрах состояния объекта управления полученная измерительной системой поступает в систему навигации и стабилизации. Выработанные сигналы системой навигации и стабилизации с учетом параметров сформированных системой наведения поступают на исполнительные органы и осуществляют управление объектом с учетом действующих возмущений.
Возникающие сбои и отказы в системе управления, вызванные внешними возмущениями, приводят к неточным расчетам кинематических параметров движения объекта управления, что недопустимо в системах управления с высокоточностными требованиями.
Задачей изобретения является разработка способа и устройства восстановления вектора кажущейся скорости после вынужденного прерывания работы БЦВМ, вызванного отказами, сбоями на период заранее неизвестной длительности и последовательности прерываний для сохранения точности кинематических параметров движения динамического объекта.
Требуемый технический результат достигается тем, что при восстановлении (прогнозировании) значений вектора кажущейся скорости (временного ряда) используются заранее обученные идентифицирующая (аппроксимирующая) и прогнозирующая ИНС, размещенные в специальном вычислителе. Идентифицирующая ИНС сглаживает значения временного ряда, полученного от измерительной системы с последующей записью и сохранением на НМД. В случае вынужденного прерывания работы системы управления счетчик фиксирует количество пропущенных тактов работы БЦВМ, определяя период прогноза. Прогнозирующая ИНС осуществляет восстановление ВКС с использованием предыстории, записанной на НМД, а также с использованием первых значений приращений ВКС после прерывания. Восстановленные значения записываются на НМД и используют для решения бортовой навигационной задачи, а также в случае повторного прерывания могут быть использованы в качестве предыстории для работы прогнозирующей ИНС. Полученный технический результат позволяет сохранить точность работы системы автоматического управления при решении навигационной задачи на борту.
Сущность изобретения состоит из следующей процедуры:
1. С использованием значений телеметрии в режиме (offline) осуществляют обучение ИНС 1 (идентифицирующей) и ИНС 2 (прогнозирующей) до требуемых условий допустимой ошибки. Результаты, выданные ИНС 2, в процессе обучения, сравниваются с реальными текущими значениями телеметрии при штатной работе БЦВМ.
2. На НМД записывается информация о приращении ВКС ΔWξ, ΔWη, ΔWζ после аппроксимации ИНС 1 в последовательно идущие через один цикл моменты времени t1, t2, … tn.
3. В оперативном режиме работы (online) в случае прерывания работы системы управления специальный счетчик осуществляет учет пропущенных тактов для формирования входных значений на ИНС 2. В выборку входных значений для осуществления более точного прогнозирования ВКС также включены первые полученные значения приращений ΔW после прерывания работы.
4. В случае повторного прерывания работы, спрогнозированные значения ИНС 2 записываются на НМД и являются предысторией для очередного восстановления ВКС при последующем прерывании.
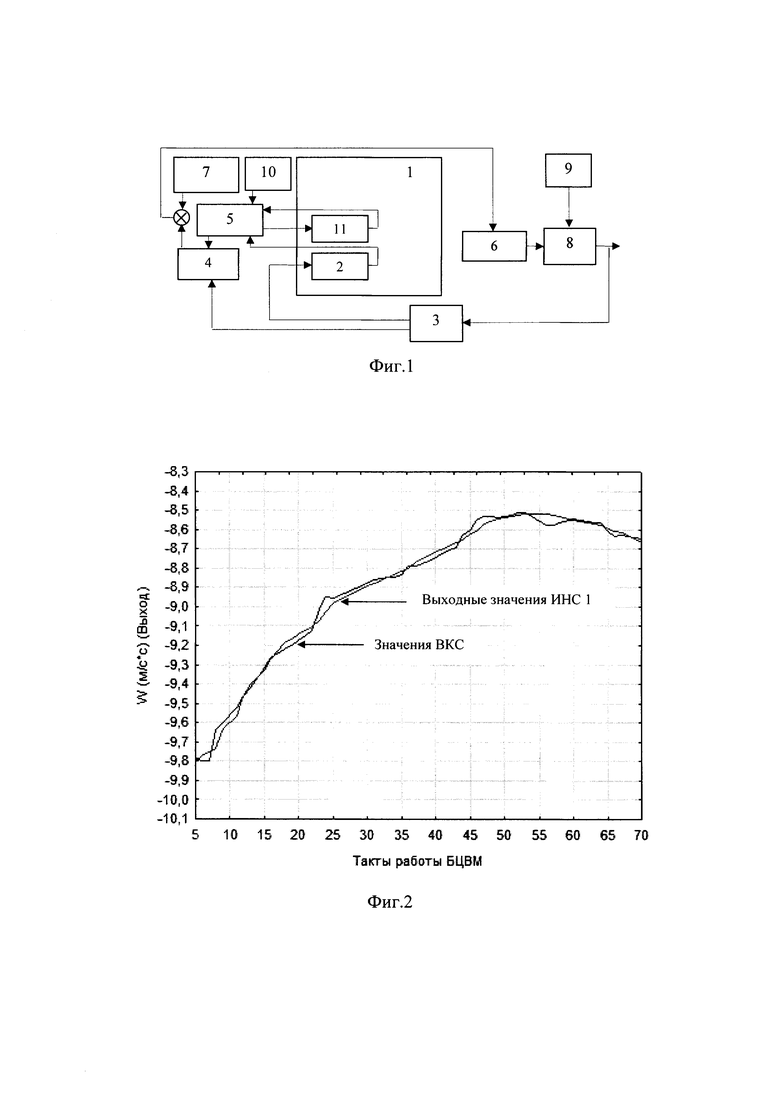
На фиг. 1 в вычислителе блок 1 с идентифицирующей ИНС 1 (блок 2) приращения значений кажущейся скорости W по соответствующим направлениям ξ, η, ζ после интегрирования поступают от измерительной системы блок 3 в систему навигации блок 4 и в вычислитель на вход ИНС 1, с выхода ИНС 1 поступают на вход НМД блок 5, в котором непрерывно осуществляется запись и перезапись значений ВКС.
Сформированные управляющие воздействия блоком 4 поступают на исполнительные органы блок 6 с учетом коррекции рассогласований заданных программой движения и выработанных бортовой системой наведения блок 7. Исполнительные органы блок 6 осуществляют управление объектом блок 8 с учетом действующих возмущений блок 9.
В случае прерывания работы системы управления временной ряд ВКС, записанный в блок 5 с учетом числа пропущенных тактов работы БЦВМ, полученных из специального счетчика блок 10 поступают в блок 11, где прогнозирующая, заранее обученная ИНС 2 осуществляет восстановление пропущенных значений временного ряда с использованием известных значений ВКС до момента прерывания, отстоящих на период прерывания и полученных первых значений приращений кажущейся скорости (достаточно трех) после одного прерывания или последовательно чередующихся прерываний.
В результате многочисленных экспериментов для разных участков движения установлены оптимальные параметры идентифицирующей ИНС 1: количество нейронов скрытого слоя 5, функция активации нейронов скрытого слоя - гиперболический тангенс, для второго слоя - линейная тождественная функция. Архитектуру ИНС 1 можно описать профилем 1-5-1 (1 вход, 5 нейронов скрытого слоя и 1 выход). Использовался алгоритм обучения BFGS - итерационный метод численной оптимизации. Ошибка обучения не превышала 0,005. Обучающая подвыборка составляла 70%, контрольная и тестовая по 15% каждая.
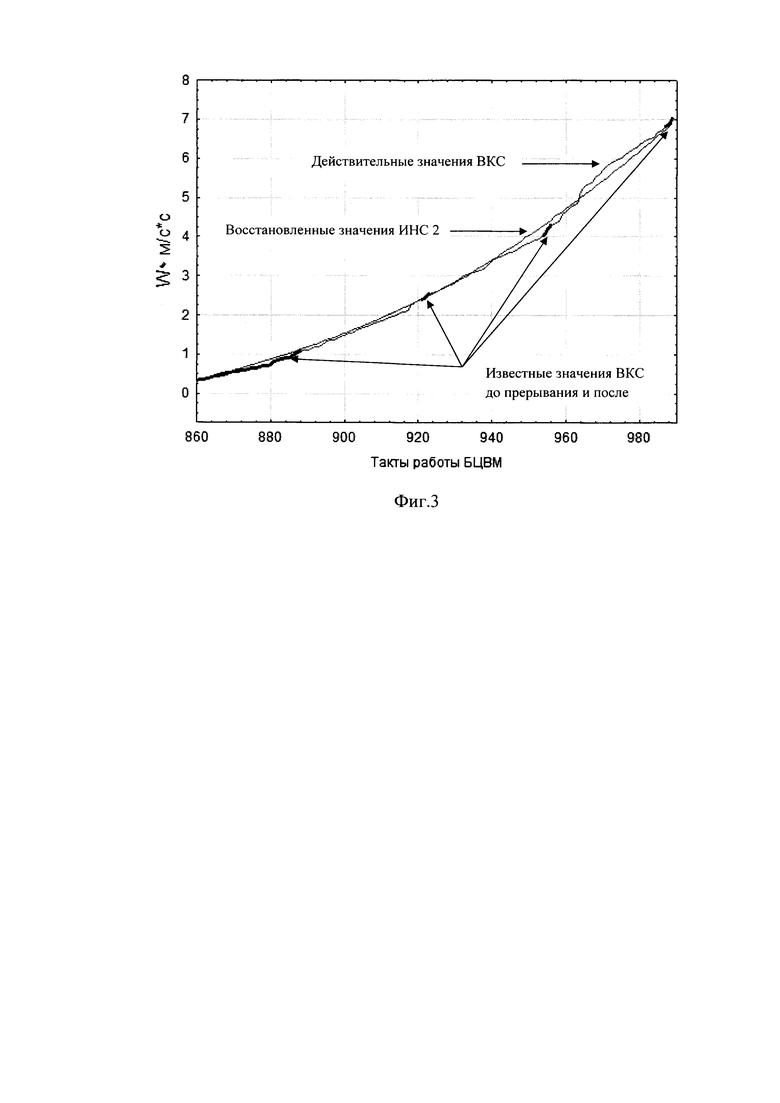
На фигуре 2. можно наглядно увидеть, что ИНС прямого распространения сигнала с 5 нейронами скрытого слоя с достаточной точностью аппроксимирует временной ряд со значениями приращений ВКС. Вместе с этим ИНС 1 выбросы или шумы во временном ряду сглаживает, что в свою очередь позволит осуществить более точный прогноз. На фигуре 2 рассмотрен пример аппроксимации значений по направлению ξ, поскольку вдоль этой оси наиболее интенсивно изменяется приращение кажущейся скорости.
В целях минимизации задействования вычислительных ресурсов БЦВМ опытным путем установлено, что для прогнозирующей ИНС 2 достаточно трехслойного персептрона с семью нейронами скрытого слоя. Архитектуру прогнозирующей нейронной сети можно описать профилем 1-7-1. Наиболее стабильные и точные результаты были получены при использовании в качестве функции активации нейронов скрытого слоя - гиперболический тангенс, для выходного слоя - линейная тождественная функция. В качестве алгоритма обучения также использовался BFGS.
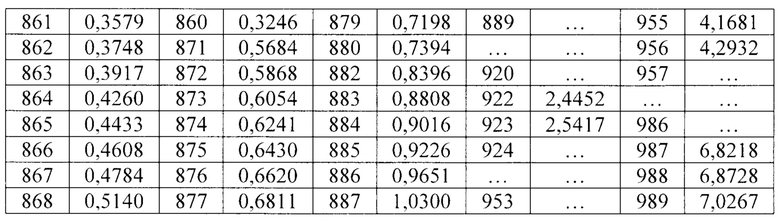
На фигуре 3 представлено графическое отображение работы прогнозирующей ИНС 2 при трех последовательных прерываниях на участке движения с 860 по 989 такт работы БЦВМ (табл. 1).
В результате моделирования и сравнении с традиционными математическими методами восстановления ВКС (полиномиальная аппроксимация с последующей экстраполяцией) на разных участках движения и времени вынужденного прерывания работы БЦВМ при использовании ансамбля из идентифицирующей и прогнозирующей нейронных сетей удалось повысить точность восстановления ВКС на 30%.

За счет применения ансамбля ИНС сокращено время счета tсч при восстановлении ВКС для «гладких участках» полета на 6240 мкс, для «динамических участков» на 50324 мкс.
Вычислитель с ансамблем ИНС может быть реализован программно-алгоритмическим способом или с использованием программируемых логических интегральных схем. Несмотря на предложенное описание изобретения, специалисты в данной области могут вносить свои дополнения и изменения.
Технический результат, достигаемый с использованием вычислителя, содержащего ансамбль нейронных сетей, накопителя на магнитном диске, специального счетчика пропущенных тактов расширяет функциональные возможности системы управления в оптимизации ресурсов при восстановлении кинематических параметров движения после вынужденного прерывания работы, вызванных отказами или сбоями. В результате повышается достоверность результатов восстановления ВКС и сокращается время получения восстановленных значений.
Список использованных источников
1. RU 2600099 С1, 2015 год. Способ нейросетевого прогнозирования изменения значений функции с ее предварительной вейвлет-обработкой и устройство его осуществления.
2. RU 2533321 С1, 2013 год. Способ адаптивного прогнозирования остаточного ресурса эксплуатации сложных объектов и устройство для его осуществления.
3. RU 2744041 C1, 2019 год. Способ и система для прогнозирования значений временного ряда с использованием искусственной нейронной сети.
4. Разоренов Г.Н. и др. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями): Учебник для вузов / Г.Н. Разоренов, Э.А. Бахрамов, Ю.Ф. Титов; Под ред. Г.Н. Разоренова. М.: Машиностроение, 2003., С 23-37.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕРПРЕТАЦИИ ИСКУССТВЕННЫХ НЕЙРОННЫХ СЕТЕЙ | 2018 |
|
RU2689818C1 |
| Способ и система для прогнозирования значений временного ряда с использованием искусственной нейронной сети | 2019 |
|
RU2744041C1 |
| Способ идентификации состояния сомнений человека по данным активности головного мозга | 2018 |
|
RU2688320C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ВОЗМОЖНОСТИ ВОЗНИКНОВЕНИЯ РЕЦИДИВИРУЮЩЕГО ИНФАРКТА МИОКАРДА | 1999 |
|
RU2197889C2 |
| Способ и устройство сжатия видеоинформации для передачи по каналам связи с меняющейся пропускной способностью и запоминания в системах хранения данных с использованием машинного обучения и нейросетей | 2018 |
|
RU2698414C1 |
| Способ прогнозирования прихватов бурильных труб | 2020 |
|
RU2735794C1 |
| Система оперативного управления движением транзитных поездов | 2019 |
|
RU2723051C1 |
| СПОСОБ И КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИН | 2019 |
|
RU2723805C1 |
| НЕЙРОПРОЦЕССОР | 2011 |
|
RU2473126C1 |
| Метод определения пластового давления в объеме месторождения на основе искусственных нейронных сетей | 2022 |
|
RU2808168C1 |
Настоящее техническое решение относится к области вычислительной техники. Технический результат заключается в повышении точности восстановления вектора кажущейся скорости после вынужденного прерывания работы БЦВМ. Технический результат достигается за счёт устройства восстановления вектора кажущейся скорости ансамблем искусственных нейронных сетей, в которое введены вычислитель с аппроксимирующей и прогнозирующей искусственными нейронными сетями, счетчик для подсчета пропущенных тактов БЦВМ и запоминающее устройство в виде накопителя на магнитном диске, где выход измерительной системы соединен с первым входом вычислителя с идентифицирующей искусственной нейронной сети, первый выход вычислителя соединен с первым входом накопителя на магнитном диске, первый выход накопителя на магнитном диске соединен со вторым входом вычислителя с прогнозирующей нейронной сетью, второй выход вычислителя соединен со вторым входом накопителя на магнитном диске, выход счетчика соединен с третьим входом накопителя на магнитном диске, второй выход накопителя на магнитном диске соединен со входом системы навигации. 3 ил., 1 табл.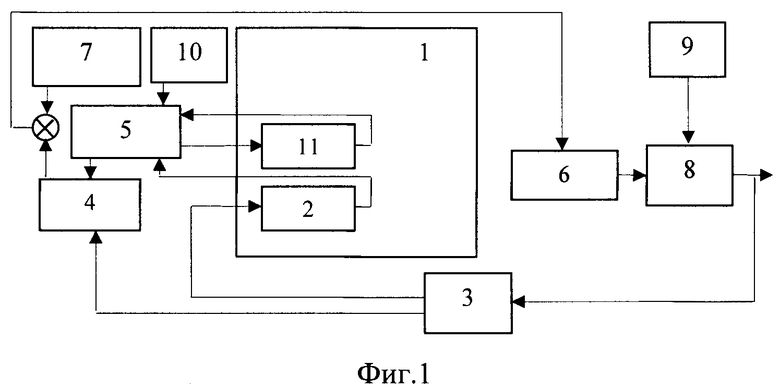
Устройство восстановления вектора кажущейся скорости ансамблем искусственных нейронных сетей, состоящее из элементов системы управления с соответствующими связями, отличающееся тем, что дополнительно введены вычислитель с аппроксимирующей и прогнозирующей искусственными нейронными сетями, счетчик для подсчета пропущенных тактов бортовой вычислительной машиной (БЦВМ) и запоминающее устройство в виде накопителя на магнитном диске, где выход измерительной системы соединен с первым входом вычислителя с идентифицирующей искусственной нейронной сети, первый выход вычислителя соединен с первым входом накопителя на магнитном диске, первый выход накопителя на магнитном диске соединен со вторым входом вычислителя с прогнозирующей нейронной сетью, второй выход вычислителя соединен со вторым входом накопителя на магнитном диске, выход счетчика соединен с третьим входом накопителя на магнитном диске, второй выход накопителя на магнитном диске соединен со входом системы навигации.
| KR 102214837 B1, 10.02.2021 | |||
| Ratnadip Adhikari et al | |||
| "A Homogeneous Ensemble of Artificial Neural Networks for Time Series Forecasting", опубл | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| СПОСОБ КОМПЬЮТЕРИЗОВАННОГО ОБУЧЕНИЯ ОДНОЙ ИЛИ БОЛЕЕ НЕЙРОННЫХ СЕТЕЙ | 2007 |
|
RU2459254C2 |
| EP 3479306 B1, 13.01.2021 | |||
| US | |||

