Область техники, к которой относится изобретение
Данное изобретение относится к газотурбинной установке для летательного аппарата, в частности, к управлению газотурбинной установкой таким образом, чтобы обеспечивать необходимую тягу в зависимости от положения рычага управления пилота летательного аппарата.
Уровень техники
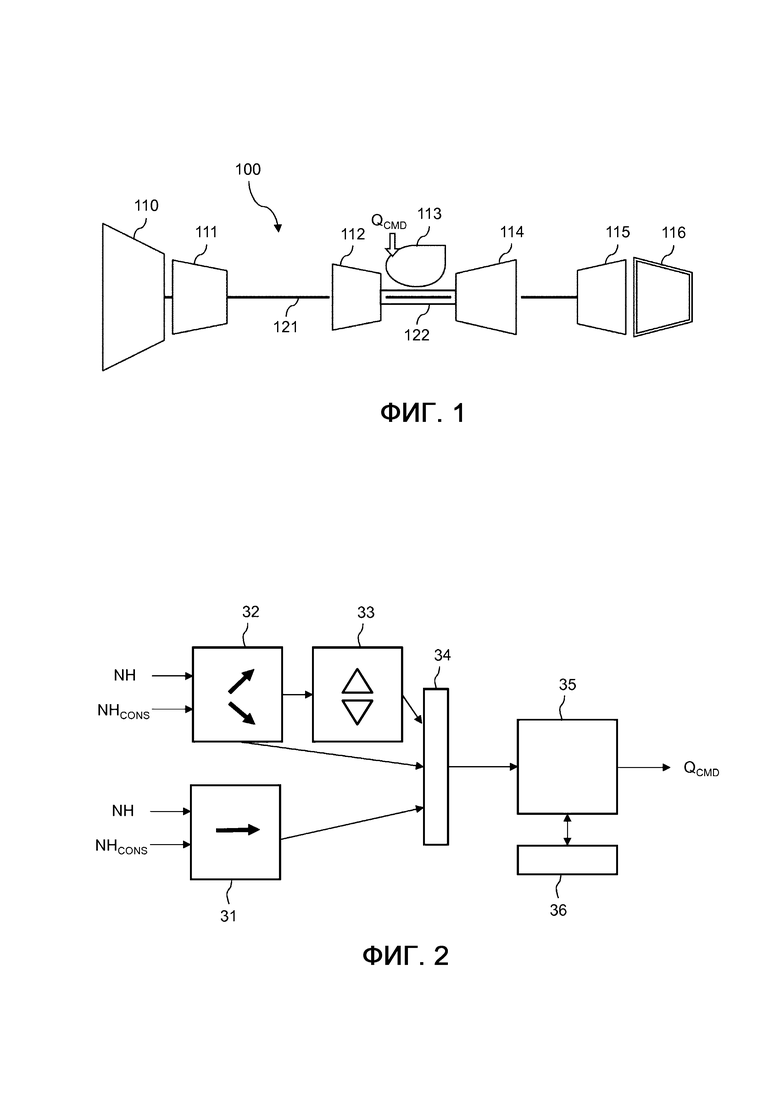
На фиг. 1 схематично показана газотурбинная установка 100 типа двухконтурного и двухвального турбореактивного двигателя летательного аппарата. Как известно, газотурбинная установка 100 содержит от входа к выходу по направлению прохождения газов вентилятор 110, компрессор 111 низкого давления, компрессор 112 высокого давления, камеру 113 сгорания, в которую поступает топливо с заданным значением расхода QCMD, турбину 114 высокого давления, турбину 115 низкого давления и выпускное сопло 116 первого контура. Компрессор 111 низкого давления (или НД) и турбина 115 низкого давления соединены валом 121 низкого давления и образуют вместе каскад низкого давления. Компрессор 112 высокого давления (или ВД) и турбина 114 высокого давления соединены валом 122 высокого давления и образуют вместе с камерой сгорания каскад высокого давления. Вентилятор 110, приводимый во вращение валом НД 121, сжимает поступающий воздух. Этот воздух делится на выходе из вентилятора 110 на поток воздуха второго контура, который направляется напрямую в сопло второго контура (не показано), через которое он выходит, участвуя в тяге, создаваемой газотурбинной установкой 100, и на так называемый поток первого контура, который заходит в газогенератор, образованный каскадом низкого давления и каскадом высокого давления, затем выходит в сопло 116 первого контура. Как известно, чтобы изменить скорость газотурбинной установки 100, пилот летательного аппарата изменяет положение рычага управления, позволяющего изменять заданное значение QCMD расхода топлива в камере 113 сгорания.
Концепция газотурбинной установки 100 требует учета запаса, достаточного против так называемого явления помпажа. Это явление, появляющееся в результате чрезмерного воздействия воздушного потока на лопатки одного из компрессоров, приводит к большим и быстрым пульсациям давления на выходе из соответствующего компрессора и может привести к самовыключению камеры 113 сгорания. Кроме того, оно создает большие колебания лопаток компрессора и может привести к механическим повреждениям. Следовательно, необходимо избегать его появления. Обычно работу компрессора в ходе использования отображают в виде диаграммы, которая показывает степень повышения давления, получаемую между выходом и входом, в зависимости от расхода проходящего через него воздушного потока; кроме того, параметры этой диаграммы устанавливают в зависимости от скорости вращения компрессора. В этой диаграмме фигурирует линия помпажа, представляющая собой максимальный предел степени сжатия, который нельзя превышать, чтобы предотвратить появления явления помпажа. Как известно, определяют так называемую рабочую линию, связывающую получаемые степени сжатия в зависимости от расхода, когда газотурбинная установка 100 находится на установившемся режиме работы. Расположение этой рабочей линии определяет конструктор газотурбинной установки 100, и расстояние от этой рабочей линии до линии помпажа является запасом по помпажу. Следует отметить, что КПД компрессора (отношение его работы сжатия воздуха к работе, необходимой для его приведения во вращение) при первом приближении повышается по мере приближения к линии помпажа. Однако, ускорения, задаваемые пилотом, начиная с установившегося режима работы (переходная фаза), для увеличения тяги, отражаются на уровне компрессора перемещением рабочей точки в направлении линии помпажа.
Действительно, дополнительная подача топлива в камеру 113 сгорания приводит к почти моментальному повышению степени сжатия, тогда как скорость вращения не успевает увеличиться по причине инерции. Изменение энтальпии, сообщаемое текучей среде при сгорании добавленного топлива, приводит к увеличению работы, производимой каждой турбиной, и, следовательно, к повышению скорости вращения соответствующего каскада. Это выражается на диаграмме компрессора возвратом от рабочей точки на рабочей линии, когда скорость опять стабилизируется, к рабочей точке, которая соответствует расходу, более высокому, чем расход в предыдущей рабочей точке.
Следовательно, конструктор газотурбинной установки 100 должен оптимизировать расположение рабочей линии, размещая ее как можно выше, чтобы использовать наилучшие КПД для компрессоров, одновременно сохраняя достаточное расстояние до линии помпажа, чтобы обеспечивать надежные ускорения.
Чтобы избежать любого явления помпажа, газотурбинная установка 100 содержит систему регулирования, применяемую электронным блоком. Как показано на фиг. 2, система регулирования содержит модуль 31 стабилизирующего управления, модуль 32 обнаружения намерения перехода, модуль 33 генерирования траектории скорости, модуль 34 выбора, модуль 35 интегрирования, а также модуль 36 контроля ограничителя.
Модуль 31 стабилизирующего управления выдает величину поправки в модуль 34 выбора в зависимости от разности между скоростью NH газотурбинной установки 100 и заданной скоростью NHCONS. Заданная скорость NHCONS пропорциональна положению рычага управления, манипулируемого пилотом летательного аппарата. Такой модуль 31 известен специалисту в данной области, и его подробное описание опускается.
Модуль 32 обнаружения намерения перехода предназначен для обнаружения намерения перехода со стороны пилота. Модуль 32 обнаружения намерения перехода определяет разность между скоростью NH газотурбинной установки 100 и заданной скоростью NHCONS. Когда рычаг управления остается в постоянном положении и когда применяют модуль 31 стабилизирующего управления, реальная скорость NH газотурбинной установки 100 является стационарной и равна заданной скорости NHCONS. Если пилот перемещает рычаг управления, заданная скорость NHCONS моментально меняется. С другой стороны, скорость NH не меняется моментально по причине инерции газотурбинной установки 100 и модуля 31 стабилизирующего управления. Таким образом, модуль 32 обнаружения намерения перехода обнаруживает намерение перехода, когда разность между заданной скоростью NHCONS и реальной скоростью NH превышает заранее определенный порог S2.
В случае запроса на ускорение, если отклонение скорости превышает заранее определенный порог S2 (NHCONS - NH > S2), происходит обнаружение запроса на ускорение. Аналогично, в случае замедления, если отклонение скорости превышает заранее определенный порог S2 (NH - NHCONS > S2), происходит обнаружение запроса на замедление. Когда обнаруживается переходная фаза, модуль 32 обнаружения намерения перехода генерирует сигнал активации, который передается на модуль 33 генерирования траектории скорости и на модуль 34 выбора, как показано на фиг. 2.
В случае запроса на ускорение модуль 33 генерирования траектории скорости определяет заданное значение скорости для ускорения (траектория ускорения) NHTRAJACC. Аналогично, в случае замедления модуль 33 генерирования траектории скорости определяет заданное значение скорости для замедления (траектория замедления) NHTRAJDECEL. В зависимости от генерируемой траектории модуль 33 генерирования траектории скорости выдает величину поправки в модуль 34 выбора.
Такой модуль 33 генерирования траектории скорости известен специалисту в данной области, в частности, из документа US2013/0008171 и из документа FR2977638А1, и его подробное описание опускается.
В этом примере, когда модуль 34 выбора получает сигнал активации от модуля 32 обнаружения намерения перехода, модуль 34 выбора выбирает величину поправки, исходящую от модуля 31 стабилизирующего управления, в отсутствие сигнала активации, и выбирает величину поправки, исходящую от модуля 33 генерирования траектории скорости, в случае получения сигнала активации. Такой модуль 34 выбора известен специалисту в данной области, и его подробное описание опускается. Выбранная величина поправки поступает в модуль 35 интегрирования. Модуль 35 интегрирования определяет заданное значение QCMD расхода топлива посредством интегрирования выбранной величины поправки.
Модуль 36 контроля ограничителя ограничивает величину заданного значения QCMD расхода, определенную модулем 35 интегрирования. Как известно, модуль 36 контроля ограничителя применяет ограничитель, называемый ограничителем С/Р и известный специалисту в данной области, чтобы защитить газотурбинную установку от помпажа. В этом примере модуль 36 контроля ограничителя позволяет определять заданные значения ограничителя при ускорении и при замедлении. Такие ограничители известны специалисту в данной области, и их подробное описание опускается.
Модуль 33 генерирования траектории скорости и модуль 36 контроля ограничителя позволяют определять траекторию ускорения, следствием чего является ограничение заданного значения QCMD расхода топлива с целью предотвращения помпажа. Такая система регулирования известна из документа FR2977638А1, и ее подробное описание опускается. Соответственно, известна защита двигателя от явления помпажа во время переходов с учетом заданного значения ускорения во время регулирования (см., например, US4543782 и US2003/0094000).
На фиг. 3 в верхней части показаны заданное значение скорости NHCONS, определяемое по рычагу управления пилота, заранее определенная траектория ускорения NHTRAJACC и текущая скорость NH. В нижней части показаны расход топлива QMAX максимального ограничения (показан линией +++), расход топлива минимального ограничения QMIN (показан линией ----), заданное значение QCMD расхода топлива (показано сплошной линией).
Когда пилот задает увеличение скорости NHCONS, текущая скорость NH повышается медленно с задержкой, учитывая, что текущее заданное значение QCMD расхода топлива ограничено расходом топлива QMAX максимального ограничения, определенным модулем 36 ограничения топлива. Фактически, насыщение QCMD значением QMAX не является систематическим и зависит от интенсивности ускорения, задаваемого заранее определенной траекторией ускорения NHTRAJACC, и от имеющегося запаса в отношении помпажа. Если этот запас не совместим с запрашиваемой степенью ускорения, чтобы следовать траекториям скорости, это приводит к ограничению QCMD по QMAX. Текущая скорость NH не успевает следовать за траекторией ускорения NHTRAJACC. Ограничение было представлено в рамках запроса на ускорение относительно помпажа, но это же относится и к запросу на замедление с учетом запаса относительно самовыключения газотурбинной установки.
Чтобы улучшить время реагирования газотурбинной установки во время переходной фазы (ускорение, замедление и т.д.), было предложено оснастить газотурбинную установку электрическим двигателем для получения дополнительного электрического крутящего момента с целью повышения скорости газотурбинной установки без риска появления помпажа. В связи с этим, из документа WO2016/020618 известна газотурбинная установка для летательного аппарата, содержащая электрический двигатель для отбора мощности на валу низкого давления и для подачи мощности на вал высокого давления.
Одна из задач изобретения состоит в обеспечении оптимального регулирования электрического крутящего момента, выдаваемого электрическим двигателем, чтобы оптимизировать время реагирования газотурбинной установки, одновременно гарантируя достаточный запас по помпажу и ограничивая электрическое потребление электрического двигателя.
Раскрытие сущности изобретения
Объектом изобретения является способ управления газотурбинной установкой, содержащей вентилятор, расположенный на входе в газогенератор, и ограничивающей поток первого контура и поток второго контура, при этом через указанный газогенератор проходит поток первого контура, и содержащей компрессор низкого давления, компрессор высокого давления, камеру сгорания, турбину высокого давления и турбину низкого давления, при этом указанная турбина низкого давления соединена с указанным компрессором низкого давления через вращающийся вал низкого давления, а указанная турбина высокого давления соединена с компрессором высокого давления через вращающийся вал высокого давления, при этом газотурбинная установка содержит электрический двигатель, образующий устройство подачи крутящего момента на вращающийся вал высокого давления, при этом в рамках способа определяют заданное значение QCMD расхода топлива в камере сгорания и заданное значение TRQCMD крутящего момента, направляемое на электрический двигатель, при этом способ управления содержит:
- этап применения первой цепи регулирования топлива с целью определения заданного значения QCMD расхода топлива, включающий в себя:
i. этап обнаружения намерения перехода скорости TopAccel, TopDecel в зависимости от разности между текущей скоростью NH и определенным заданным значением скорости NHCONS,
ii. этап определения заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons,
iii. этап определения величины поправки ΔQCMD расхода топлива в зависимости от заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons, и
iv. этап определения заданного значения QCMD расхода топлива в зависимости от величины поправки ΔQCMD расхода топлива,
- этап применения второй цепи регулирования крутящего момента с целью определения заданного значения TRQCMD крутящего момента, включающий в себя:
i. этап определения величины поправки ΔTRQCMD крутящего момента в зависимости от заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons, и
ii. этап определения заданного значения TRQCMD крутящего момента в зависимости от величины поправки ΔTRQCMD крутящего момента.
Благодаря изобретению, вторая цепь регулирования крутящего момента позволяет действовать согласованно с первой цепью регулирования расхода топлива, когда последняя ограничена в своем регулировании, в частности, по причине ограничения с целью предупреждения помпажа или самовыключения газотурбинной установки. Таким образом, текущая скорость газотурбинной установки может оперативно реагировать на заданное значение траектории. Это позволяет улучшить управляемость газотурбинной установки.
Кроме того, вторая цепь регулирования крутящего момента предпочтительно позволяет отодвинуть границы помпажа и самовыключения газотурбинной установки для обеспечения лучшего регулирования заданного значения расхода топлива. Иначе говоря, вторая цепь регулирования крутящего момента предпочтительно позволяет улучшить первую цепь регулирования расхода топлива. Предпочтительно, вторая цепь регулирования крутящего момента не подменяет первую цепь регулирования расхода топлива, а приходит ей на помощь при достижении пределов работы. Таким образом, в своей основе регулирование скорости не нарушается, что обеспечивает надежное регулирование.
Предпочтительно способ управления содержит:
- в ходе этапа применения первой цепи регулирования расхода топлива - этап обнаружения ограничителя заданного значения расхода топлива TopButeeAccel, TopButeeDecel,
- в ходе этапа применения второй цепи регулирования крутящего момента - этап обнуления заданного значения TRQCMD крутящего момента, при этом этап обнуления заданного значения TRQCMD крутящего момента отменяется в случае обнаружения намерения перехода скорости TopAccel, TopDecel и обнаружения ограничителя заданного значения расхода топлива TopButeeAccel, TopButeeDecel.
Предпочтительно способ управления содержит этап обнуления заданного значения TRQCMD крутящего момента, который осуществляют непрерывно, но который отменяют при достижении пределов регулирования заданного значения расхода топлива. Иначе говоря, электрический крутящий момент не используют непрерывно, чтобы избегать чрезмерного электрического потребления. Электрический крутящий момент подают на вал высокого давления при достижении пределов регулирования заданного значения расхода топлива (помпаж, самовыключение и т.д.), чтобы можно было их отодвинуть. Иначе говоря, во время подачи электрического крутящего момента он обеспечивает запас регулирования на первой цепи регулирования расхода топлива. После получения этого запаса заданное значение TRQCMD крутящего момента можно обнулить, в частности, постепенно.
Предпочтительно, заданное значение TRQCMD крутящего момента обнуляют постепенно, предпочтительно по меньшей мере с одним градиентом понижения. Постепенное обнуление противопоставляется резкому обнулению, которое могло бы привести к нарушениям скорости газотурбинной установки. Постепенное обнуление с градиентом понижения позволяет контролировать скорость, с которой вторая цепь регулирования крутящего момента уменьшает свое влияние, чтобы первая цепь регулирования расхода топлива могла восстановить свое влияние.
Предпочтительно, градиент понижения зависит от времени реагирования первой цепи регулирования расхода топлива. Иначе говоря, скорость обнуления является оптимальной, учитывая, что ее определяют в зависимости от первой цепи регулирования расхода топлива. Таким образом, снижение влияния второй цепи регулирования крутящего момента напрямую компенсируется первой цепью регулирования расхода топлива.
Предпочтительно, способ управления содержит этап двойного интегрирования величины поправки ΔTRQCMD крутящего момента, чтобы определить заданное значение TRQCMD крутящего момента. Двойное интегрирование представляет интерес, учитывая, что оно обеспечивает постоянную нулевую погрешность скорости и, следовательно, заранее определенное время ускорения или замедления.
Предпочтительно, заданное значение TRQCMD крутящего момента находится в пределах между максимальным значением TRQmax крутящего момента, определяемым конструкцией электрического двигателя МЕ, и минимальным значением TRQmin крутящего момента, определяемым конструкцией электрического двигателя МЕ.
Объектом изобретения является также компьютерная программа, содержащая команды для осуществления этапов описанного выше способа управления, когда указанную программу исполняет компьютер. Изобретение относится также к носителю записи указанной компьютерной программы. Вышеупомянутый носитель записи может быть любым средством или устройством, которое может хранить программу. Например, носитель может содержать средство хранения, такое как ROM, например, CD ROM или ROM микроэлектронной схемы, или магнитное средство записи, например, жесткий диск. С другой стороны, носители записи могут соответствовать передаваемому носителю, такому как электрический или оптический сигнал, который может передаваться через электрический или оптический кабель, по радио или другими средствами. В частности, заявленную программу можно загружать дистанционно через сеть типа Интернет. В альтернативном варианте носители записи могут соответствовать интегральной схеме, в которую включена программа, при этом схема выполнена с возможностью осуществлять способ или с возможностью своего использования при осуществлении данного способа.
Объектом изобретения является также электронный блок управления для газотурбинной установки, содержащий память, включающую в себя команды вышеупомянутой компьютерной программы.
Объектом изобретения является также газотурбинная установка, содержащая вышеупомянутый электронный блок.
Краткое описание чертежей
Изобретение будет более понятно из нижеследующего описания, представленного исключительно в качестве примера, со ссылками на прилагаемые чертежи, на которых:
На фиг. 1 схематично показана известная газотурбинная установка;
на фиг. 2 схематично показана известная система регулирования заданного значения расхода топлива;
на фиг. 3 представлено повышение скорости двигателя и заданного значения расхода топлива после подачи пилотом команды ускорения, согласно известному решению;
на фиг. 4 схематично показана газотурбинная установка согласно варианту осуществления изобретения;
на фиг. 5 схематично показана система регулирования заданного значения расхода топлива и заданного значения крутящего момента в соответствии с изобретением;
на фиг. 6 представлена схема первой цепи регулирования расхода топлива системы регулирования, показанной на фиг. 5;
на фиг. 7 представлена схема второй цепи регулирования крутящего момента системы регулирования, показанной на фиг. 5;
на фиг. 8 представлена схема модуля интегрирования второй цепи регулирования крутящего момента, показанного на фиг. 7;
на фиг. 9 представлено повышение скорости двигателя, заданного значения расхода топлива и заданного значения крутящего момента после подачи пилотом команды ускорения в соответствии с изобретением.
Следует отметить, что фигуры подробно иллюстрируют изобретение для осуществления изобретения, при этом, разумеется, указанные фигуры могут помочь, в случае необходимости, определить изобретение.
Осуществление изобретения
На фиг. 4 схематично показана газотурбинная установка Т типа двухконтурного и двухвального турбореактивного двигателя для летательного аппарата. Как известно, газотурбинная установка Т содержит от входа к выходу по направлению прохождения газов вентилятор 10, компрессор 11 низкого давления, компрессор 12 высокого давления, камеру 13 сгорания, в которую поступает топливо с заданным значением расхода QCMD, турбину 14 высокого давления, турбину 15 низкого давления и выпускное сопло 16 первого контура. Компрессор 11 низкого давления (или НД) и турбина 15 низкого давления соединены валом 21 низкого давления и образуют вместе каскад низкого давления. Компрессор 12 высокого давления (или ВД) и турбина 14 высокого давления соединены валом 22 высокого давления и образуют вместе с камерой 13 сгорания каскад высокого давления. Вентилятор 10, приводимый во вращение валом 21 НД, сжимает поступающий воздух. Этот воздух делится на выходе из вентилятора на воздушный поток второго контура, который направляется напрямую в сопло второго контура (не показано), через которое он выходит, участвуя в тяге, создаваемой газотурбинной установкой 100, и на так называемый поток первого контура, который заходит в газогенератор, образованный каскадом низкого давления и каскадом высокого давления, затем выходит в сопло 16 первого контура. Как известно, чтобы изменить скорость газотурбинной установки Т, пилот летательного аппарата изменяет положение рычага управления, позволяющего изменять заданное значение расхода топлива QCMD в камере 13 сгорания.
Как показано на фиг. 4, газотурбинная установка Т дополнительно содержит электрический двигатель МЕ, выполненный с возможностью создания дополнительного крутящего момента на валу 22 высокого давления. Работой газотурбинной установки Т управляет электронный блок 20, который получает сигналы, характеризующие параметры работы газотурбинной установки Т, в частности, скорость NH газотурбинной установки Т, для выработки заданного значения QCMD расхода топлива и заданного значения TRQCMD крутящего момента для электрического двигателя МЕ.
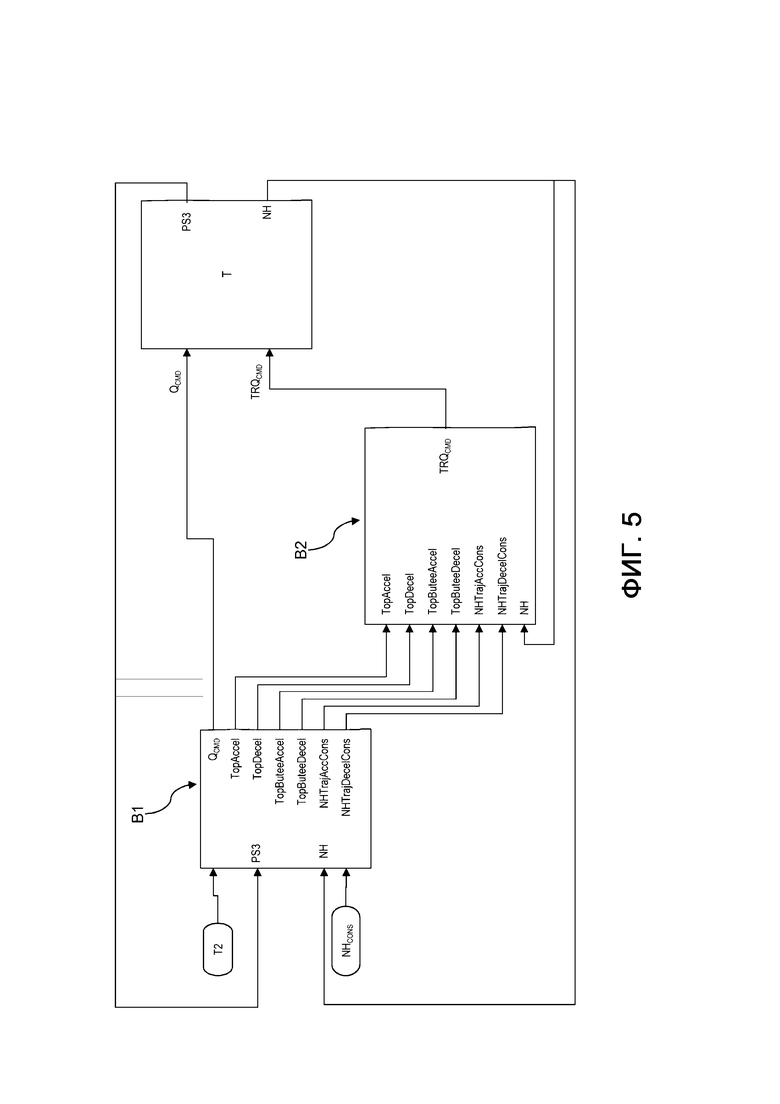
Как показано на фиг. 5, электронный блок 20 содержит систему регулирования, содержащую первую цепь В1 регулирования заданного значения QCMD расхода топлива, которая будет в дальнейшем называться «первой цепью В1 топлива», и вторую цепь В2 регулирования заданного значения электрического крутящего момента TRQCMD, которая в дальнейшем будет называться «второй цепью В2 крутящего момента».
Как показано на фиг. 5, первая цепь В1 топлива содержит:
- вход скорости NH газотурбинной установки Т,
- вход заданной скорости NHCONS, определяемой положением рычага управления, манипулируемого пилотом летательного аппарата,
- выход заданного значения QCMD расхода топлива, передаваемого на газотурбинную установку Т, и
- множество выходных индикаторов:
- индикатор запроса перехода ускорения TopAccel
- индикатор запроса перехода замедления TopDecel
- индикатор ограничителя ускорения TopButeeAccel, определяемого по насыщению привода корректоров ограничителем С/Р ускорения,
- индикатор ограничителя замедления TopButeeDecel, определяемого по насыщению привода корректоров ограничителем С/Р самовыключения,
- заданное значение траектории скорости для ускорения NHTrajAccelCons.
- заданное значение траектории скорости для замедления NHTrajDecelCons.
Как показано на той же фиг. 5, вторая цепь В2 крутящего момента получает на входе все выходные индикаторы, генерируемые первой цепью В1 топлива, то есть TopAccel, TopDecel, TopButeeAccel, TopButeeDecel, NHTrajAccelCons, NHTrajDecekCons, а также вход скорости NH газотурбинной установки Т. Предпочтительно, благодаря этой системе регулирования, вторая цепь В2 крутящего момента позволяет выработать заданное значение TRQCMD крутящего момента, адаптируемое в зависимости от поведения цепи В1 топлива, которая остается приоритетной.
В этом примере первая цепь В1 топлива содержит также вход статического давления PS3 в камере сгорания.
Далее следует подробное описание структуры и работы каждой цепи В1, В2.
Первая цепь В1 регулирования топлива
Как известно и как показано на фиг. 6, первая цепь В1 топлива содержит модуль 301 стабилизирующего управления, модуль 302 обнаружения намерения перехода, модуль 303 генерирования траектории скорости, модуль 304 выбора, модуль 305 интегрирования, а также модуль 306 контроля ограничителя, который выполняет функцию насыщения интегрирования и, следовательно, команды топлива QCMD.
Как будет пояснено ниже, модуль 303 генерирования траектории скорости выполнен также с возможностью генерировать команду для контроля этой траектории.
Модуль 301 стабилизирующего управления выдает в модуль 304 выбора величину поправки в зависимости от разности между скоростью NH газотурбинной установки Т и заданной скоростью NHCONS. Такой модуль 301 стабилизирующего управления известен специалисту в данной области, и его подробное описание опускается.
Модуль 302 обнаружения намерения перехода предназначен для обнаружения намерения перехода со стороны пилота. Модуль 302 обнаружения намерения перехода определяет разность между скоростью NH газотурбинной установки Т и заданной скоростью NHCONS. Когда рычаг управления остается в постоянном положении и когда применяют модуль 301 стабилизирующего управления, реальная скорость NH газотурбинной установки Т является стационарной и равна заданной скорости NHCONS. Если пилот перемещает рычаг управления, заданная скорость NHCONS моментально изменяется. Наоборот, скорость NH не меняется моментально по причине инерции газотурбинной установки Т и модуля 301 стабилизирующего управления. Таким образом, модуль 302 обнаружения намерения перехода обнаруживает намерение перехода, когда разность между заданной скоростью NHCONS и реальной скоростью NH превышает заранее определенный порог S3.
Согласно изобретению, модуль 302 обнаружения намерения перехода выдает также индикатор запроса перехода ускорения TopAccel и индикатор запроса перехода замедления TopDecel. В случае ускорения, если отклонение скорости превышает заранее определенный порог S3 (NHCONS – NH > S3), активируется индикатор запроса перехода ускорения TopAccel. Эта функция реализуется в подмодуле 302а ускорения, который является компаратором. Аналогично, в случае замедления, если отклонение скорости превышает заранее определенный порог S3 (NH – NHCONS > S3), активируется индикатор запроса перехода замедления TopDecel. Эта функция реализуется в подмодуле 302d замедления, который является компаратором. Например, порог S3 составляет 200 об/мин.
При обнаружении переходной фазы модуль 302 обнаружения намерения перехода генерирует сигнал активации, который передается в модуль 303 генерирования траектории скорости и в модуль 304 выбора, как показано на фиг. 6.
В случае ускорения модуль 303 генерирования траектории скорости определяет заданное значение скорости для ускорения (траектория ускорения) NHTrajAccelCons. Аналогично, в случае замедления модуль 303 генерирования траектории скорости определяет заданное значение скорости NH для замедления (траектория замедления) NHTrajDecelCons. Такой модуль 303 генерирования траектории скорости известен специалисту в данной области, и его подробное описание опускается. Кроме того, модуль 303 генерирования выполнен также с возможностью генерировать величину поправки, которая, в случае необходимости, позволяет следовать заданной траектории.
В этом примере, когда модуль 304 выбора получает сигнал активации от модуля 302 обнаружения намерения перехода, модуль 304 выбора выбирает величину поправки, поступающую от модуля 301 стабилизирующего управления, при отсутствии получения сигнала активации и выбирает величину поправки, поступающую от модуля 303 генерирования траектории скорости в случае получения сигнала активации. Такой модуль 304 выбора известен специалисту в данной области, и его подробное описание опускается.
Выбранная величина поправки топлива ΔQCMD поступает в модуль 305 интегрирования. Модуль 305 интегрирования определяет заданное значение QCMD расхода топлива посредством интегрирования величины поправки топлива ΔQCMD.
Модуль 306 контроля ограничителя ограничивает заданное значение QCMD расхода топлива, определенное модулем 305 интегрирования. Как известно, модуль 306 контроля ограничителя применяет ограничитель, называемый ограничителем С/Р и известный специалисту в данной области. В этом примере модуль 306 контроля ограничителя позволяет определить заданные значения ограничителя при ускорении и при замедлении. Для этого в случае ускорения модуль 306 контроля ограничителя позволяет определить индикатор насыщения команды корректоров ограничителем С/Р ускорения TopButeeAccel. Аналогично, в случае замедления модуль 306 контроля ограничителя позволяет определить индикатор насыщения команды корректоров ограничителем С/Р самовыключения TopButeeDecel. Такие ограничители известны специалисту в данной области, и их подробное описание опускается. Предпочтительно модуль 306 контроля ограничителя определяет ограничители в зависимости от статического давления PS3 в камере сгорания и от скорости NH (скорость каскада высокого давления).
Как было указано выше, такое регулирование является оптимальным для ограничения заданного значения QCMD расхода топлива, передаваемого в газотурбинную установку Т, но требует длительного времени реагирования.
Для преодоления этого недостатка с первой цепью В1 топлива связывают вторую цепь В2 крутящего момента для определения оптимального заданного значения TRQCMD крутящего момента. Для этого, в отличие от известных решений, первая цепь В1 топлива передает во вторую цепь В2 крутящего момента различные выходные индикаторы: TopAccel, TopDecel, NHTrajAccelCons, NHTrajDecelCons, TopButeeAccel, TopButeeDecel.
Вторая цепь В2 регулирования крутящего момента
Вторая цепь В2 регулирования крутящего момента предназначена для бережливого использования электрического двигателя МЕ. Так, заданное значение TRQCMD крутящего момента активируется, только если траектории ограничены (TopButeeAccel или TopButeeDecel) и если разность между заданным значением скорости NHCONS и реальной скоростью NH указывает на потребность в активации контроля при переходе (TopAccel или TopDecel). Иначе говоря, заданное значение TRQCMD крутящего момента активируют, только если заданное значение QCMD расхода топлива ограничено в своем диапазоне работы.
Как будет показано ниже, выдаваемый электрический крутящий момент TRQCMD позволяет отодвинуть рабочую точку от пределов работы и получить, таким образом, запас команды, чтобы опять адаптировать заданное значение QCMD расхода топлива. Благодаря изобретению, первая цепь В1 топлива и вторая цепь В2 крутящего момента обмениваются, чтобы улучшить управляемость газотурбинной установки Т (время реагирования) и одновременно ограничивать потребление электрической энергии электрическим двигателем МЕ.
Как показано на фиг. 7, вторая цепь В2 регулирования крутящего момента содержит модуль 401 определения команды, модуль 402 обнуления, модуль 403 интегрирования и переключатель 404.
Модуль 401 определения команды содержит:
- вход текущей скорости NH газотурбинной установки,
- заданное значение скорости NH для ускорения (траектория ускорения) NHTrajAccelCons, дающее величину заданного значения для команды крутящего момента,
- заданное значение скорости NH для замедления (траектория замедления) NHTrajDecelCons, дающее величину заданного значения для команды крутящего момента.
Модуль 401 определения команды содержит подмодуль 401d замедления и подмодуль 401а ускорения, которые соответственно выполнены с возможностью вычисления команды крутящего момента для ускорения (крутящий момент ускорения) TRQTrajAccelCmd и команды крутящего момента для замедления (крутящий момент замедления) TRQTrajDecelCmd.
В этом примере подмодуль 401 ускорения вычисляет величину поправки типа второй производной для ускорения (крутящий момент ускорения) TRQTrajAccelCmd в зависимости от заданного значения скорости NH для ускорения (траектория ускорения) NHTrajAccelCons и от входа текущей скорости NH. Предпочтительно подмодуль 401а ускорения представляет собой корректор типа двойного интегратора, который отвечает следующей передаточной функции:
 ,
,
в которой:
- К является заранее определенной обратной константой, и
- τNH, τTransit и τBF являются заранее определенными константами времени.
Структура такого подмодуля 401а ускорения известна специалисту в данной области. Структура и функция подмодуля 401d замедления являются аналогичными.
Как показано на фиг. 7, выбор команды перед интегрированием при помощи модуля 403 интегрирования обеспечивается переключателем 404, чтобы выбрать команду замедления при замедлении или команду ускорения при ускорении.
Модуль 402 обнуления содержит множество входных индикаторов, выдаваемых первой цепью В1 топлива:
- индикатор запроса перехода ускорения TopAccel
- индикатор запроса перехода замедления TopDecel
- индикатор ограничителя ускорения TopButeeAccel, определяемого по насыщению привода корректоров ограничителем С/Р ускорения,
- индикатор ограничителя замедления TopButeeDecel, определяемого по насыщению привода корректоров ограничителем С/Р самовыключения.
Модуль 402 обнуления предназначен для обнуления заданного значения TRQCMD крутящего момента. Как будет пояснено ниже, обнуление является не резким, а постепенным. Модуль обнуления применяют непрерывно. Вместе с тем, обнуление отменяется:
- если запрошено ускорение и если ограничитель ускорения уже достигнут (TopAccel и TopButeeAccel активированы) или
- если запрошено замедление и если ограничитель замедления уже достигнут (TopDecel и TopButeeDecel активированы).
Когда заданное значение QCMD расхода топлива первой цепи В1 топлива стремится отойти от допустимого рабочего диапазона, модуль 402 обнуления не обнуляется. Таким образом, заданное значение TRQCMD крутящего момента позволяет отодвинуть рабочую точку от пределов работы. Обнуление крутящего момента TRQCMD начинается, только если возможно регулирование по заданному значению QCMD расхода топлива.
Иначе говоря, вторая цепь В2 крутящего момента действует синергически с первой цепью В1 топлива. Вторая цепь В2 крутящего момента приходит на помощь первой цепи В1 топлива. На установившейся скорости заданное значение TRQCMD крутящего момента обнуляют, чтобы ограничить электрическое потребление и повысить КПД.
Как показано на фиг. 7, модуль 403 интегрирования содержит:
- вход поправки, получающий величину поправки ΔTRQCMD крутящего момента от переключателя 404,
- максимальное значение крутящего момента TRQmax, определяемое по конструкции электрического двигателя МЕ,
- минимальное значение крутящего момента TRQmin, определяемое по конструкции электрического двигателя МЕ,
- вход обнуления RAZ, получаемый от модуля 402 обнуления,
- выход заданного значения TRQCMD крутящего момента.
В этом примере модуль 403 интегрирования является двойным интегратором, чтобы интегрировать величину поправки ΔTRQCMD крутящего момента. Это позволяет обеспечивать постоянную нулевую погрешность скорости и, следовательно, заранее определенное время ускорения или замедления.
Пример модуля 403 интегрирования детально показан на фиг. 8. В этом примере применения модуль 403 интегрирования позволяет определить заданное значение TRQCMD крутящего момента по нескольким линейно нарастающим функциям или градиентам. Как показано на фиг. 8, модуль 403 интегрирования включает в себя два модуля вычисления значений насыщения интеграторов 51, 52.
Как показано на фиг. 8, оба модуля 51, 52 вычисления будут насыщаться, чтобы соблюдать ограничения максимального TRQMAX и минимального TRQMIN крутящего момента, связанные с условиями электрической машины МЕ, и чтобы избегать расхождения модулей 51, 52 вычисления в случае ограничения их запросов физической конструкцией электрического двигателя МЕ.
Каждый модуль 51, 52 вычисления содержит вход обнуления RAZ, чтобы постепенно уменьшать заданное значение TRQCMD крутящего момента.
Действительно, сразу по завершении перехода необходимо аннулировать заданное значение дополнительного или дефицитного механического крутящего момента TRQCMD. Действительно, крутящий момент, используемый для перехода, не может сохраняться, так как он больше не соответствует текущей потребности и привел бы к нежелательному чрезмерному электрическому потреблению.
Например, в случае замедления вторая цепь В2 крутящего момента задает противодействующий крутящий момент TRQCMD, чтобы обеспечить возможность понижения скорости NH в соответствии с определенной траекторией, при этом в конце перехода газотурбинная установка Т достигает числа оборотов малого газа. Если сохранить противодействующий крутящий момент TRQCMD во время замедления на стабилизировавшейся фазе малого газа, топливо, необходимое для поддержания малого газа, должно будет без всякой нужды компенсировать этот противодействующий крутящий момент, который на этой фазе работы не нужен. Это отрицательно скажется на КПД. Это рассуждение можно применить как в фазе конца ускорения, так и в фазе, в которой чередуются ускорения и замедления.
Как показано на фиг. 7, индикатор обнуления RAZ позволяет обнулить каждый из интеграторов 51, 52, когда его активируют. Однако, чтобы избежать нарушения скорости NH по причине слишком быстрого отключения электрического крутящего момента TRQ, заданное значение TRQCMD крутящего момента медленно уменьшают в соответствии с заранее определенным градиентом, то есть в этом примере с градиентом уменьшения GKGS (не показан). На практике в этом примере значения интеграторов сохраняют в памяти и постепенно обнуляют в зависимости от предыдущих значений. Когда индикатор обнуления RAZ перестает соответствовать нулю, значения интеграторов начинают опять возрастать.
Предпочтительно градиент уменьшения GKGS определяют заранее в зависимости от времени реагирования первой цепи В1 топлива, при этом время реагирования получают путем испытаний и моделирования. Таким образом, модуль 403 интегрирования второй цепи В2 крутящего момента снижает свое влияние на скорость NH, что предпочтительно позволяет первой цепи В1 топлива эффективно адаптировать заданное значение QCMD расхода топлива, учитывая, что добавление электрического крутящего момента позволило отодвинуть рабочую точку от пределов QMAX, QMIN. Компенсация, производимая первой цепью В1 топлива, является естественной и контролируемой.
Иначе говоря, вторая цепь В2 крутящего момента позволяет снять нагрузку с первой цепи В1 топлива во время перехода. Заданное значение TRQCMD крутящего момента обнуляют, когда исчезают условия активации регулирования по крутящему моменту.
Аннулирование крутящего момента TRQ, создаваемого электрической машиной МЕ, необходимо одновременно компенсировать посредством адаптации заданного значения QCMD расхода топлива, иначе нарушение скорости NH станет систематическим. Предпочтительно адаптация заданного значения QCMD расхода топлива происходит автоматически, и нет необходимости вычислять новые индикаторы во второй цепи В2 крутящего момента для первой цепи В1 топлива.
Далее следует описание примера осуществления способа управления газотурбинной установкой, в рамках которого определяют заданное значение QCMD расхода топлива и заданное значение TRQCMD электрического крутящего момента.
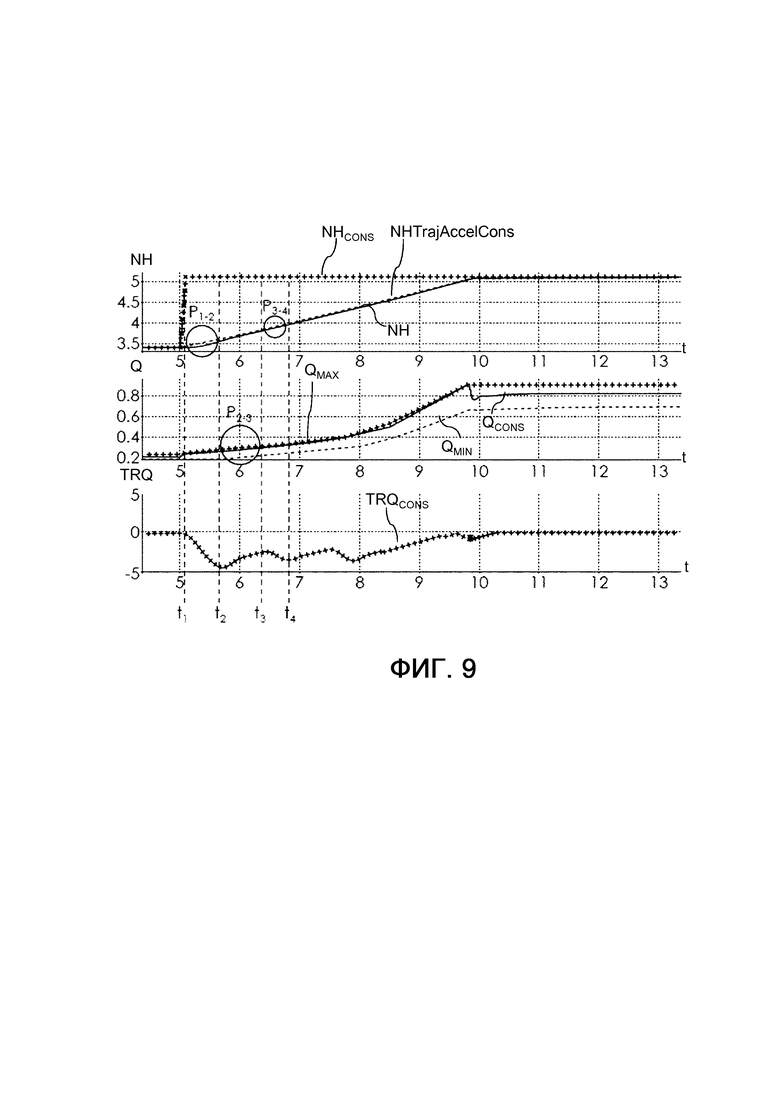
В этом примере осуществления пилот манипулирует рычагом управления с целью повышения скорости газотурбинной установки Т в момент t1=5 секунд, как показано на фиг.9.
Первая цепь В1 регулирования обнаруживает переход скорости через модуль 302 обнаружения намерения перехода и выдает индикатор запроса перехода ускорения TopAccel. Точно так же, модуль 303 генерирования траектории скорости определяет заданное значение скорости для ускорения (траектория ускорения) NHTrajAccelCons. Как показано на фиг. 9, траектория ускорения имеет крутизну. Кроме того, модуль 306 контроля ограничителя выдает заданное значение QCMD расхода топлива и определяет заданное значение ограничителя при ускорении TopButeeAccel, которое задает максимальное значение расхода топлива QMAX.
В ходе периода Р1-2, определенного между моментами t1 и t2, текущая скорость NH ниже заданного значения траектории ускорения NHTrajAccelCons, так как заданное значение QCMD расхода топлива ограничено максимальным заданным значением QMAX расхода топлива.
Во время этого периода Р1-2 заданное значение TRQCMD крутящего момента постепенно возрастает (условно на фиг. 9 увеличение крутящего момента имеет отрицательное значение) до момента t2. По мере увеличения заданного значения TRQCMD крутящего момента текущая скорость NH повышается за счет дополнительного электрического крутящего момента и позволяет оперативно следовать траектории ускорения NHTrajAccelCons, что является крайне предпочтительным. Кроме того, по мере возрастания заданного значения TRQCMD крутящего момента заданное значение QCMD расхода топлива отходит от максимального значения QMAX расхода топлива, что позволяет получить диапазон регулирования для заданного значения QCMD расхода топлива, которое перестает быть ограниченным.
В ходе периода Р2-3, определенного между моментами t2 и t3, первая цепь В1 топлива позволяет адаптировать заданное значение QCMD расхода топлива, чтобы текущая скорость NH могла оперативно следовать траектории ускорения NHTrajAccelCons. Поскольку заданное значение QCMD расхода топлива отошло от максимального заданного значения QMAX расхода топлива, заданное значение ограничителя при ускорении TopButeeAccel больше не активируется. Поэтому обнуление заданного значения TRQCMD крутящего момента можно осуществить в период Р2-3. Как показано на фиг. 9, обнуление осуществляют постепенно, чтобы резко не понижать текущую скорость NH и чтобы позволить первой цепи В1 топлива возобновить регулирование.
В момент t3, аналогично моменту t1, заданное значение QCMD расхода топлива ограничено максимальным заданным значением QMAX расхода топлива. При этом активируют заданное значение ограничителя при ускорении TopButeeAccel, что отменяет обнуление заданного значения TRQCMD крутящего момента, которое опять повышается. В момент t3 заданное значение TRQCMD крутящего момента не успело обнулиться. Аналогично, в период Р3-4, определенный между моментами t3 и t4, текущей скоростью NH меньше заданного значения траектории ускорения NHTrajAccelCons, так как заданное значение QCMD расхода топлива ограничено максимальным заданным значением QMAX расхода топлива. Заданное значение TRQCMD крутящего момента постепенно увеличивается до момента t4.
Благодаря изобретению, электрический двигатель МЕ используется бережно для обеспечения оптимального следования траектории, что позволяет получить запас регулирования заданного значения QCMD расхода топлива. Первую цепь В1 топлива и вторую цепь В2 крутящего момента применяют синергически, чтобы оптимизировать следование траектории скорости и, таким образом, улучшить управляемость газотурбинной установки Т.
Разумеется, можно использовать только некоторые из этих индикаторов. Точно так же, можно использовать другие индикаторы для повышения точности регулирования заданного значения крутящего момента.




Изобретение относится к способу управления газотурбинной установкой (Т), содержащему электрический двигатель (МЕ), образующий устройство подачи крутящего момента на вращающийся вал (22) высокого давления, при этом в рамках способа определяют заданное значение QCMD расхода топлива и заданное значение TRQCMD крутящего момента, направляемое на электрический двигатель (МЕ), при этом способ управления содержит: этап применения первой цепи регулирования топлива с целью определения заданного значения QCMD расхода топлива, этап применения второй цепи регулирования крутящего момента с целью определения заданного значения TRQCMD крутящего момента, включающий в себя: i) этап определения величины поправки ΔTRQCMD крутящего момента в зависимости от заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons, и ii) этап определения заданного значения TRQCMD крутящего момента в зависимости от величины поправки ΔTRQCMD крутящего момента. Также представлены газотурбинная установка и электронный блок управления. 3 н. и 5 з.п. ф-лы, 9 ил.
1. Способ управления газотурбинной установкой (Т), содержащей вентилятор (10), расположенный на входе в газогенератор, и ограничивающей поток первого контура и поток второго контура, при этом поток первого контура проходит через указанный газогенератор, и содержащей компрессор (11) низкого давления, компрессор (12) высокого давления, камеру (13) сгорания, турбину (14) высокого давления и турбину (15) низкого давления, причем указанная турбина (15) низкого давления соединена посредством вращающегося вала (10) низкого давления с указанным компрессором (11) низкого давления, а указанная турбина (14) высокого давления соединена посредством вращающегося вала (22) высокого давления с указанным компрессором (12) высокого давления, при этом газотурбинная установка содержит электрический двигатель (МЕ), образующий устройство подачи крутящего момента на вращающийся вал (22) высокого давления, при этом согласно способу определяют заданное значение QCMD расхода топлива в камере (13) сгорания и заданное значение TRQCMD крутящего момента, направляемое на электрический двигатель (МЕ), при этом способ управления содержит:
- этап применения первой цепи (В1) регулирования топлива с целью определения заданного значения QCMD расхода топлива, включающий в себя:
i) этап обнаружения намерения перехода скорости TopAccel, TopDecel в зависимости от разности между текущей скоростью NH и определенным заданным значением скорости NHCONS,
ii) этап определения заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons,
iii) этап определения величины поправки ΔQCMD расхода топлива в зависимости от заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons, и
iv) этап определения заданного значения QCMD расхода топлива в зависимости от величины поправки ΔQCMD расхода топлива,
- этап применения второй цепи (В2) регулирования крутящего момента с целью определения заданного значения TRQCMD крутящего момента, включающий в себя:
i) этап определения величины поправки ΔTRQCMD крутящего момента в зависимости от заданного значения скорости перехода NHTrajAccelCons, NHTrajDecelCons, и
ii) этап определения заданного значения TRQCMD крутящего момента в зависимости от величины поправки ΔTRQCMD крутящего момента.
2. Способ управления по п. 1, содержащий:
- в ходе этапа применения первой цепи (В1) регулирования топлива - этап обнаружения ограничителя заданного значения расхода топлива TopButeeAccel, TopButeeDecel,
- в ходе этапа применения второй цепи (В2) регулирования крутящего момента - этап обнуления заданного значения TRQCMD крутящего момента, при этом этап обнуления заданного значения TRQCMD крутящего момента отменяют в случае обнаружения намерения перехода скорости TopAccel, TopDecel и обнаружения ограничителя заданного значения расхода топлива TopButeeAccel, TopButeeDecel.
3. Способ управления по п. 2, в котором заданное значение TRQCMD крутящего момента обнуляют постепенно, предпочтительно по меньшей мере с одним градиентом понижения.
4. Способ управления по п. 3, в котором градиент понижения зависит от времени реагирования первой цепи (В1) регулирования расхода топлива.
5. Способ управления по одному из пп. 1-4, содержащий этап двойного интегрирования величины поправки ΔTRQCMD крутящего момента, чтобы определить заданное значение TRQCMD крутящего момента.
6. Способ управления по одному из пп. 1-5, в котором заданное значение TRQCMD крутящего момента находится в пределах между максимальным значением TRQmax крутящего момента, определяемым конструкцией электрического двигателя МЕ, и минимальным значением TRQmin крутящего момента, определяемым конструкцией электрического двигателя МЕ.
7. Электронный блок управления газотурбинной установкой, включающий в себя память, которая содержит компьютерную программу, содержащую инструкции для осуществления этапов способа управления по одному из пп. 1-6.
8. Газотурбинная установка, содержащая электронный блок по п. 7.
| EP 1990519 A2, 12.11.2008 | |||
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЗАДАННОГО ЗНАЧЕНИЯ ПАРАМЕТРА, КОТОРЫЙ ВЛИЯЕТ НА ТЯГУ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2630068C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474711C1 |

