ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу управления движением транспортного средства и к устройству управления движением транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] В Патентной литературе 1 описано автоматическое стартстопное устройство (устройство старт-стоп), которое содержит средство управления, предназначенное не только для управления автоматической остановкой двигателя при выполнении заданного условия автоматической остановки для состояния замедления, причем условие заключается в том, что требуемый крутящий момент мал относительно сопротивления движению во время работы двигателя, но и для управления отсоединением пусковой муфты при выполнении условия отсоединения муфты сцепления после автоматической остановки двигателя.
Список противопоставленных документов
Патентная литература
[0003] Патентная литература 1: JP H07-266932 A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Инерционное движение, во время которого транспортное средство движется с отсоединенной муфтой сцепления для передачи мощности между двигателем и ведущими колесами, не может подавать вращательную движущую силу ведущих колес в электромотор, и, следовательно, рекуперация энергии замедления не может быть выполнена.
По этой причине при малой продолжительности инерционного движения потеря энергии замедления из-за невозможности ее рекуперации может превышать эффект снижения расхода топлива вследствие инерционного движения, что приводит к снижению эффективности использования топлива.
Задача настоящего изобретения заключается в уменьшении снижения эффективности использования топлива, обусловленной невозможностью рекуперации энергии замедления из-за инерционного движения.
Решение задачи
[0005] В соответствии с аспектом настоящего изобретения обеспечен способ управления движением транспортного средства, содержащий этапы, на которых: определяют намерение водителя для ускорения во время движения транспортного средства; прогнозируют при определении, что водитель не имеет намерения для ускорения, какой из первого эффекта снижения расхода топлива вследствие инерционного движения и второго эффекта снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой, причем инерционное движение вызывает движение транспортного средства при отключенной передаче мощности между двигателем и ведущим колесом транспортного средства, и рекуперация энергии замедления подает вращательную мощность ведущего колеса транспортного средства в электромотор; выполняют инерционное движение, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления; и выполняют рекуперацию энергии замедления, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления.
[0006] Задача и преимущество настоящего изобретения воплощены и достигнуты с использованием элементов и их сочетания, описанных в формуле изобретения. Следует понимать, что как приведенное выше описание, так и следующее далее подробное описание являются только примерными и иллюстративными и не ограничивают заявленное настоящее изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
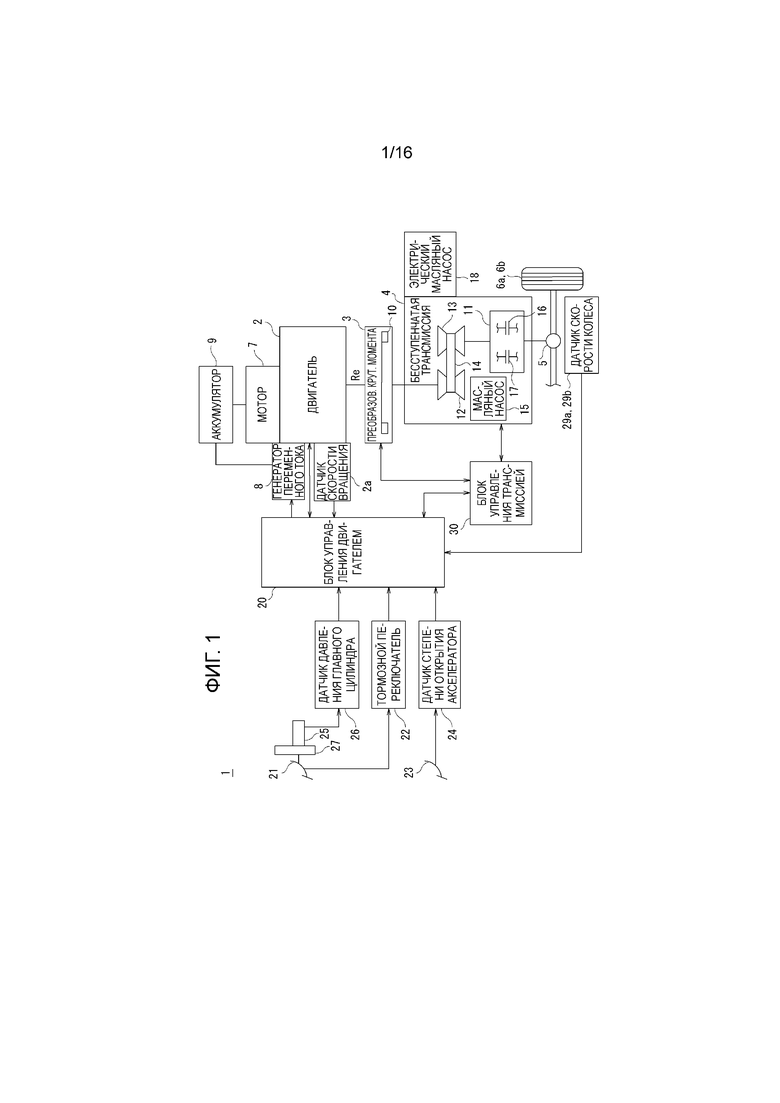
[0007] Фиг. 1 представляет собой структурную схему конфигурации транспортного средства, оборудованного устройством управления движением транспортного средства в соответствии с первым вариантом выполнения;
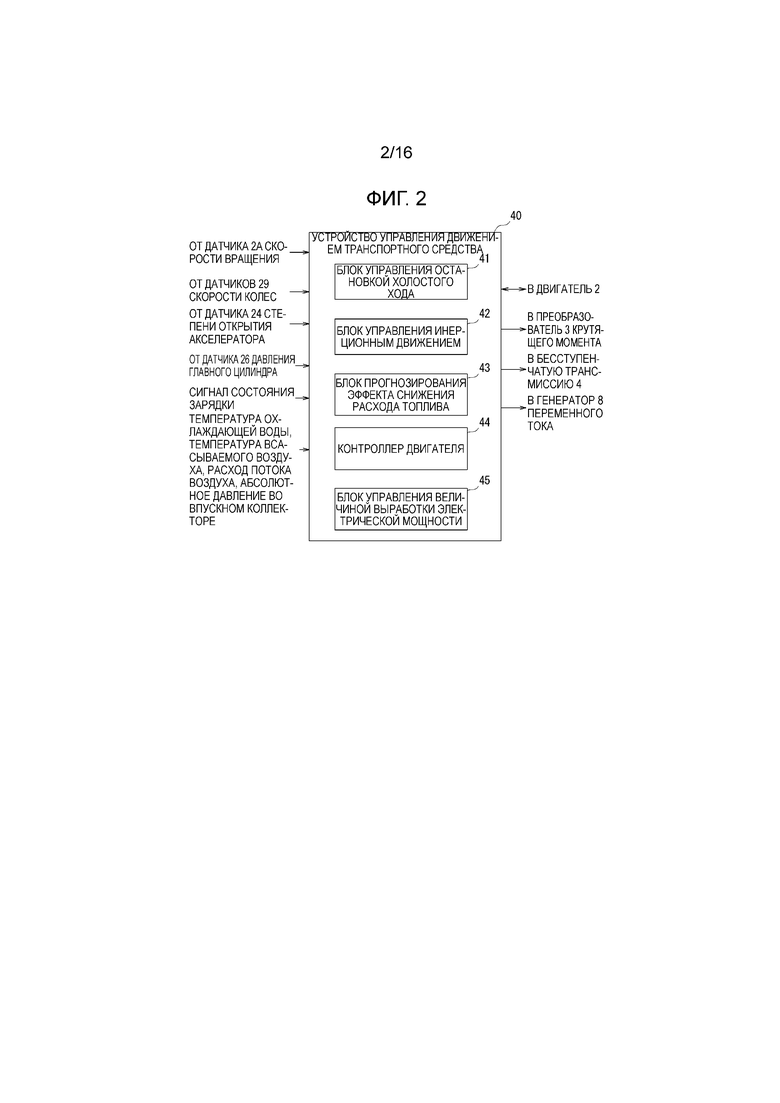
Фиг. 2 представляет собой функциональную схему конфигурации устройства управления движением транспортного средства в соответствии с первым вариантом выполнения;
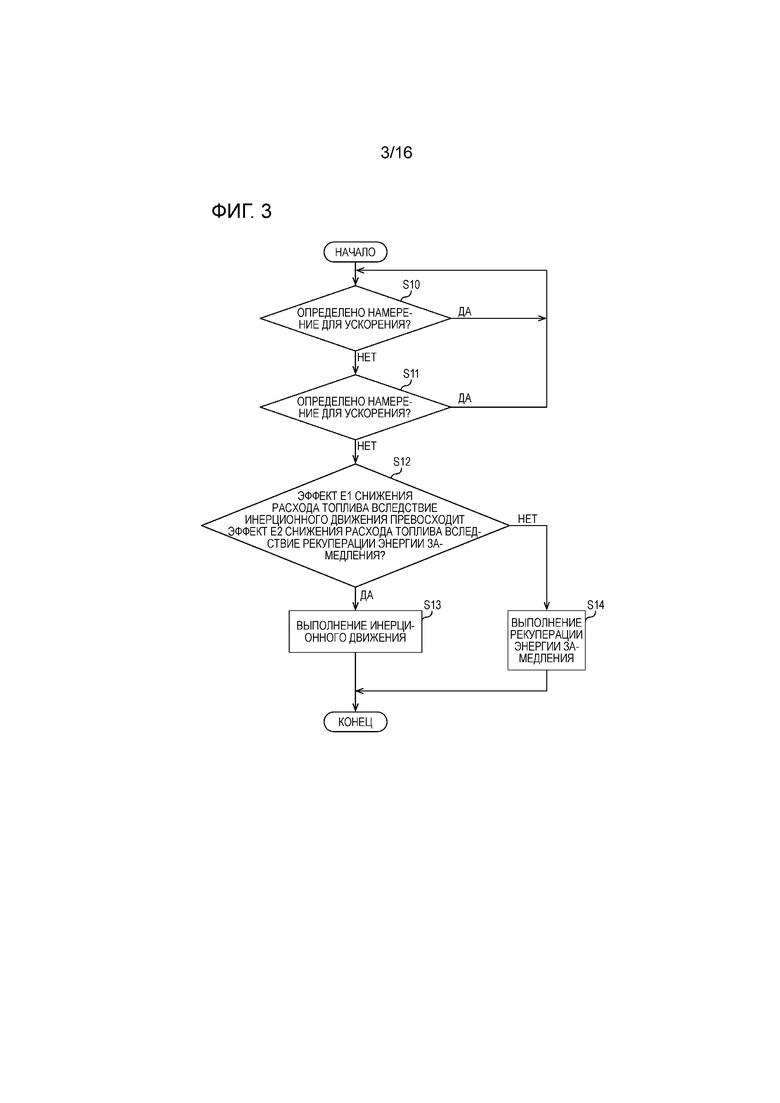
Фиг. 3 представляет собой блок-схему, поясняющую пример процесса, выполняемого устройством управления движением транспортного средства в соответствии с первым вариантом выполнения;
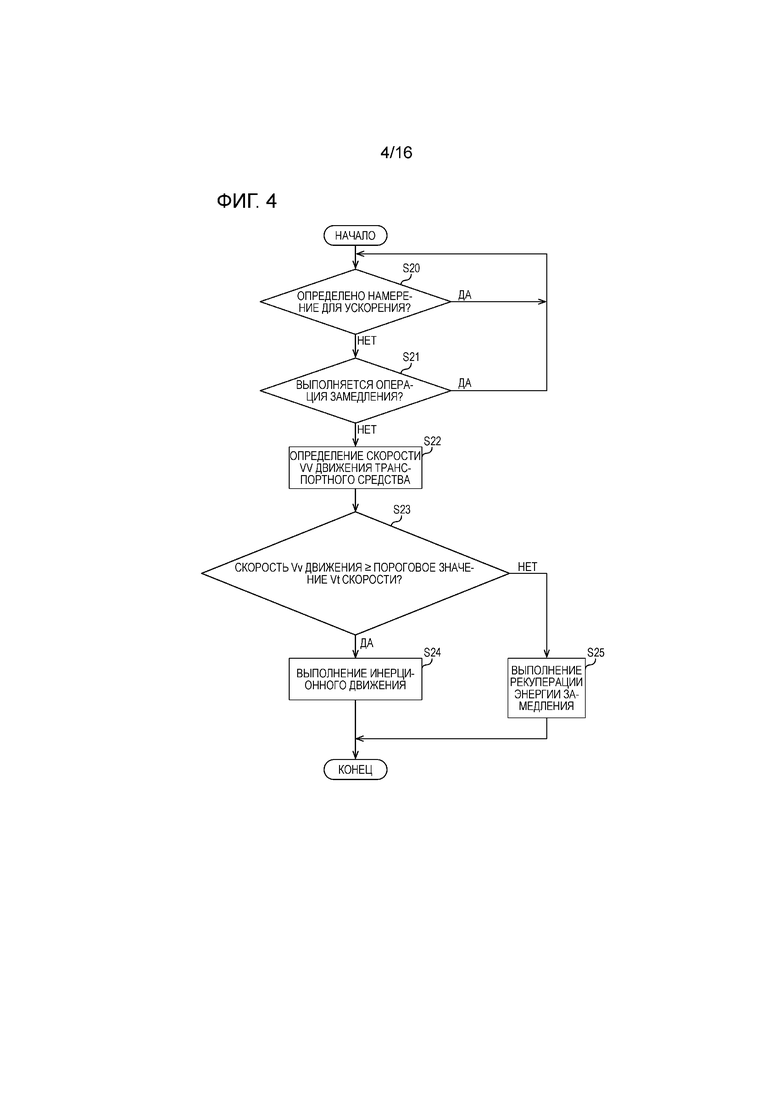
Фиг. 4 представляет собой блок-схему, поясняющую пример процесса, выполняемого устройством управления движением транспортного средства в соответствии со вторым вариантом выполнения;
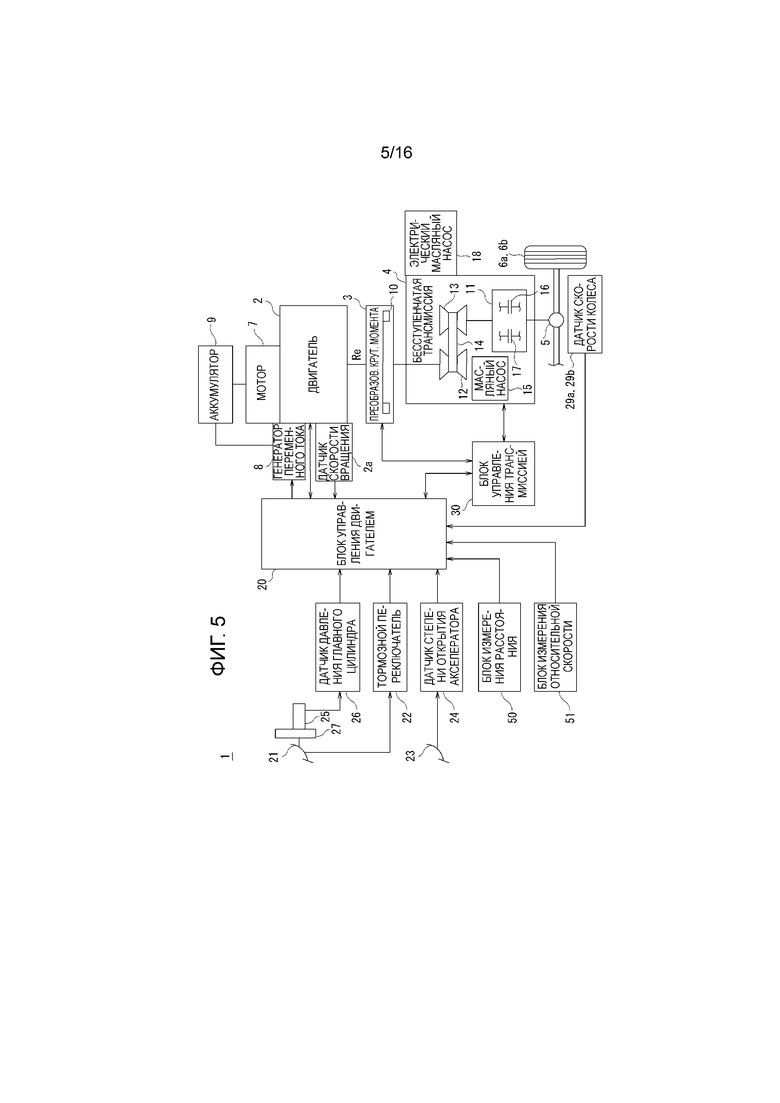
Фиг. 5 представляет собой структурную схему конфигурации транспортного средства, оборудованного устройством управления движением транспортного средства в соответствии с третьим вариантом выполнения;
Фиг. 6 представляет собой функциональную схему конфигурации устройства управления движением транспортного средства в соответствии с третьим вариантом выполнения;
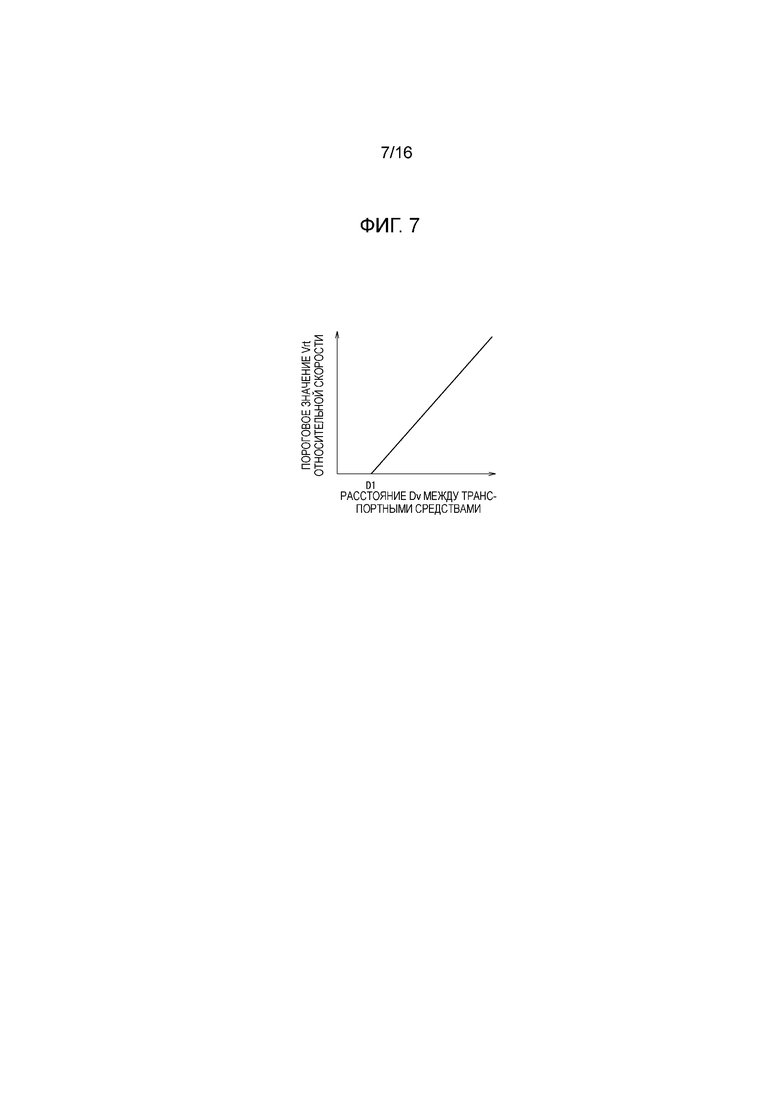
Фиг. 7 представляет собой пояснительный чертеж одного примера графика, используемого для определения порогового значения относительной скорости;
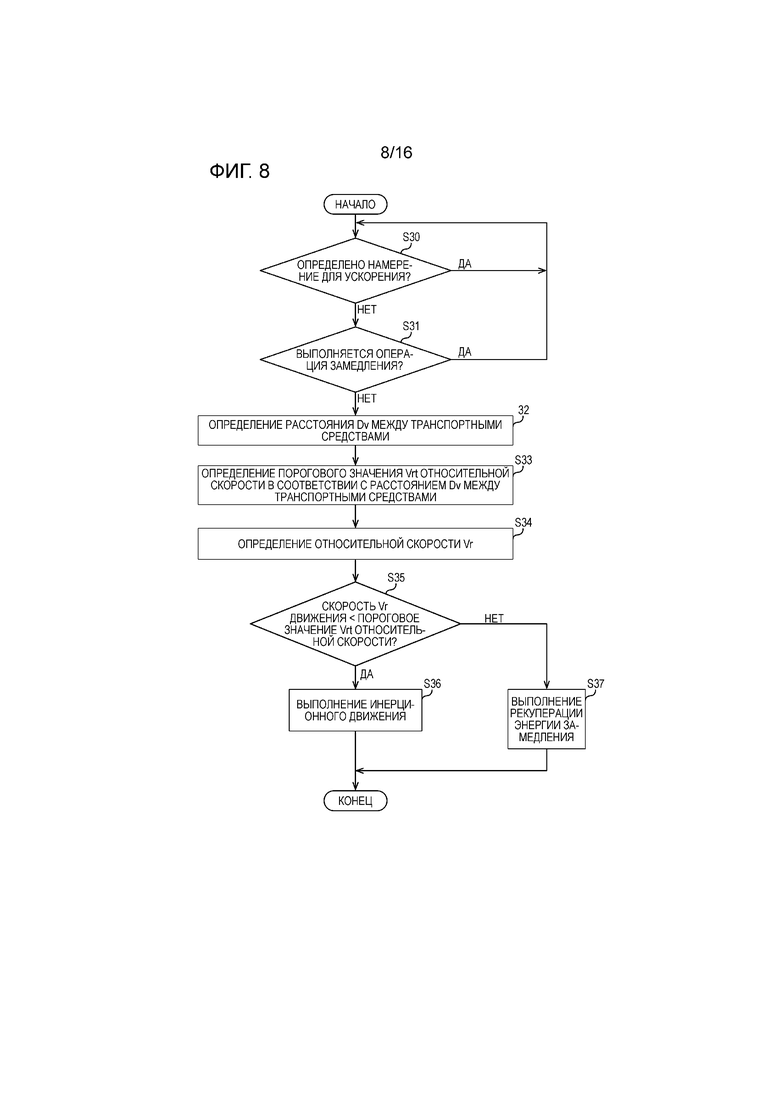
Фиг. 8 представляет собой блок-схему, поясняющую пример процесса, выполняемого устройством управления движением транспортного средства в соответствии с третьим вариантом выполнения;
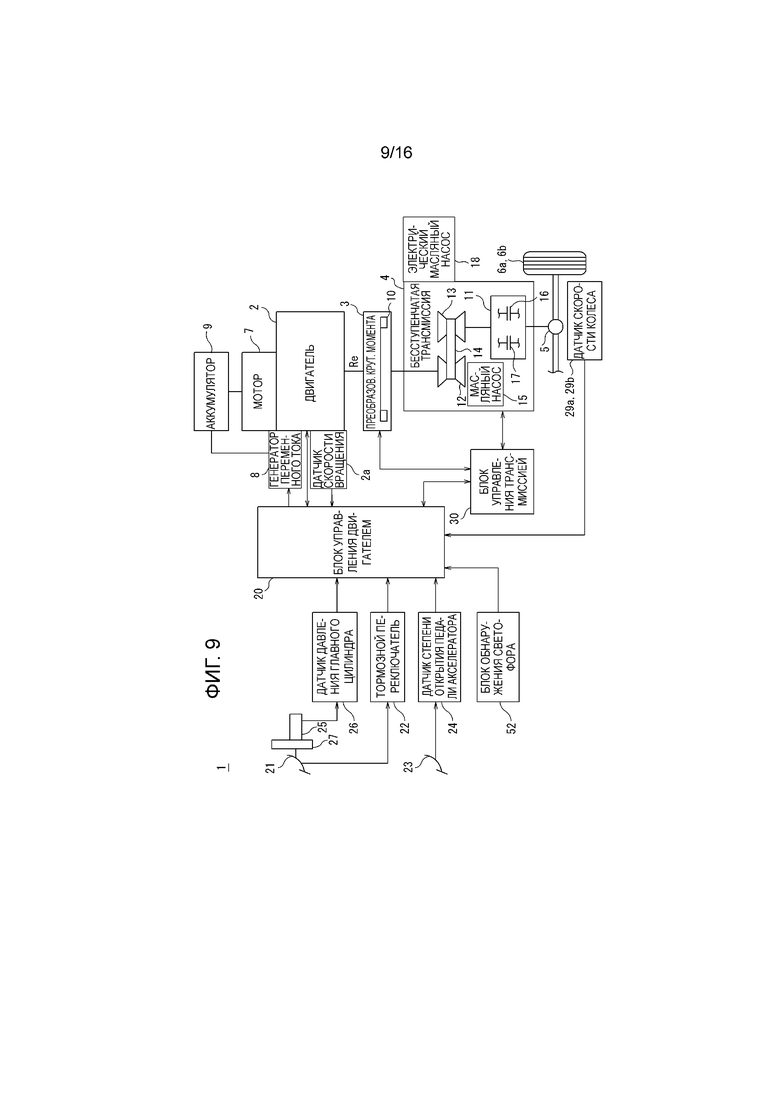
Фиг. 9 представляет собой структурную схему конфигурации транспортного средства, оборудованного устройством управления движением транспортного средства в соответствии с четвертым вариантом выполнения;
Фиг. 10 представляет собой функциональную схему конфигурации устройства управления движением транспортного средства в соответствии с четвертым вариантом выполнения;
Фиг. 11 представляет собой пояснительный чертеж одного примера графика, используемого для определения второго порогового значения скорости;
Фиг. 12 представляет собой блок-схему, поясняющую пример процесса, выполняемого устройством управления движением транспортного средства в соответствии с четвертым вариантом выполнения;
Фиг. 13 представляет собой структурную схему конфигурации транспортного средства, оборудованного устройством управления движением транспортного средства в соответствии с пятым вариантом выполнения;
Фиг. 14 представляет собой функциональную схему конфигурации устройства управления движением транспортного средства в соответствии с пятым вариантом выполнения;
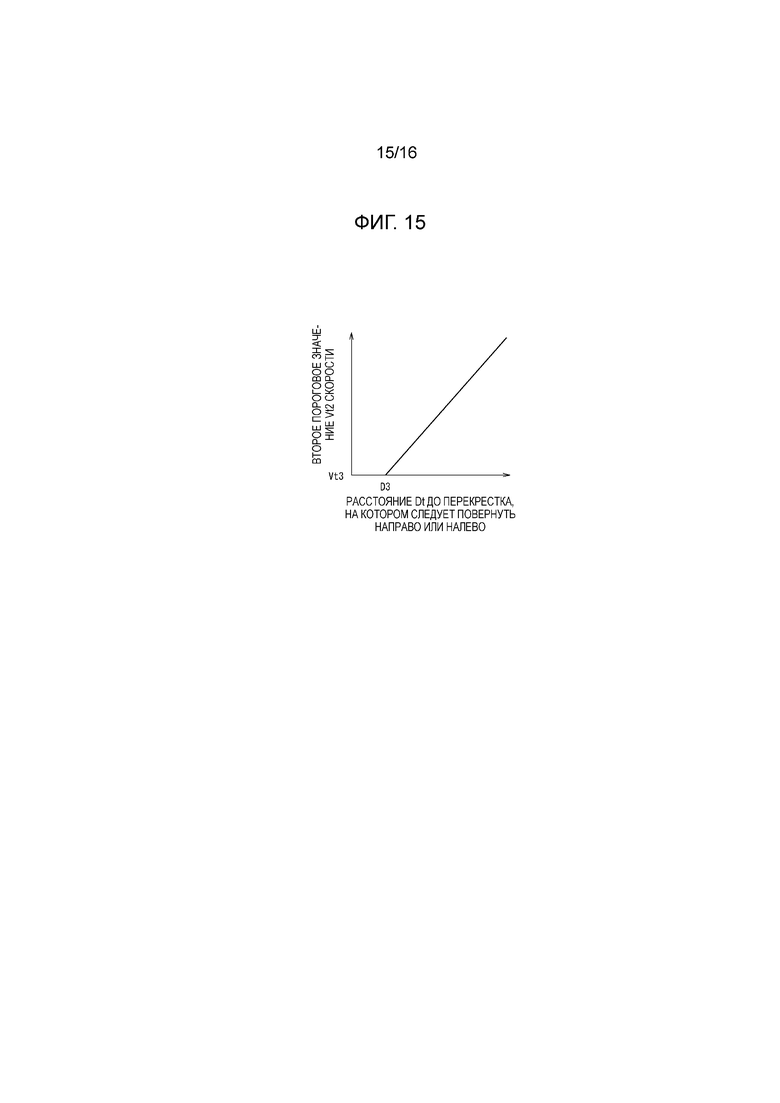
Фиг. 15 представляет собой пояснительный чертеж одного примера графика, используемого для определения второго порогового значения скорости; и
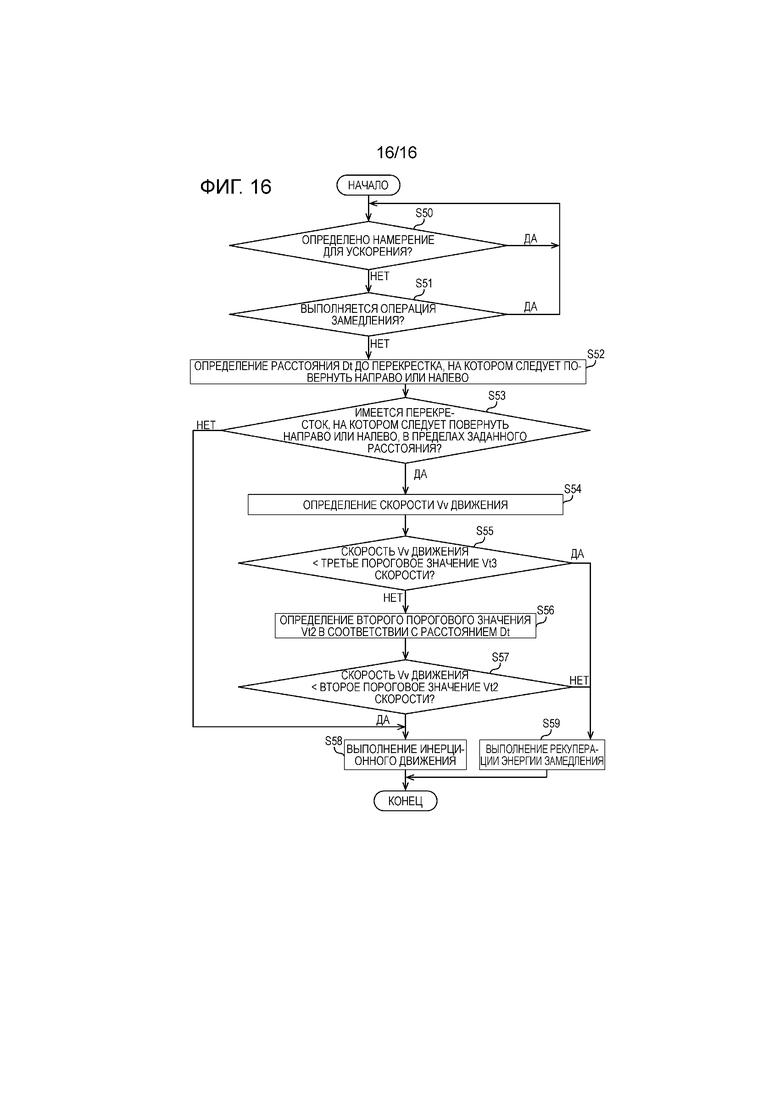
Фиг. 16 представляет собой блок-схему, поясняющую пример процесса, выполняемого устройством управления движением транспортного средства в соответствии с пятым вариантом выполнения.
ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0008] Далее варианты выполнения настоящего изобретения будут описаны со ссылкой на чертежи.
Первый вариант выполнения
Конфигурация
Смотри Фиг. 1. Двигатель 2, который представляет собой двигатель внутреннего сгорания транспортного средства 1, обеспечен преобразователем 3 крутящего момента на выходной стороне двигателя. Преобразователь 3 крутящего момента соединен с бесступенчатой трансмиссией 4 ременного типа на выходной стороне преобразователя. Вращательная движущая сила, выдаваемая двигателем 2, подается через преобразователь 3 крутящего момента в бесступенчатую трансмиссию 4, изменяется в соответствии с требуемым передаточным отношением и затем передается через шестерню 5 дифференциала на ведущие колеса 6a и 6b. Двигатель 2 включает в себя мотор 7 для запуска двигателя и генератор 8 переменного тока для выработки электрической мощности.
[0009] Электромотор 7 может представлять собой, например, стартерный мотор для запуска двигателя. Двигатель 2 может запускаться с использованием мотора SSG (Separated Starter Generator) в качестве мотора 7, обеспеченного отдельно от стартерного мотора. Мотор 7 приводится в действие с использованием электрической мощности, подаваемой аккумулятором 9, и запускает двигатель на основе команды запуска двигателя. Кроме того, при достижении двигателем 2 самоподдерживаемого вращения после начала впрыска топлива в двигатель, мотор 7 останавливается.
Генератор 8 переменного тока, приводимый во вращение двигателем 2, вырабатывает электрическую мощность, которая подается в устройство, например, аккумулятор 9. Генератор 8 переменного тока может представлять собой мотор SSG. При использовании мотора SSG в качестве генератора 8 переменного тока генератор 8 переменного тока выполняет не только функцию мотора, которая содействует движущей силе двигателя 2 движущей силой, создаваемой за счет электрической мощности, подаваемой от аккумулятора 9, но также функцию выработки электрической мощности, которая вырабатывает электрическую мощность за счет движущей силы двигателя 2. Генератор 8 переменного тока соответствует электромотору.
[0010] Преобразователь 3 крутящего момента увеличивает крутящий момент при низкой скорости транспортного средства. Преобразователь 3 крутящего момента имеет блокировочную муфту 10. Когда скорость Vv движения транспортного средства равна или больше заданной скорости V1, преобразователь 3 крутящего момента зацепляет блокировочную муфту 10 для регулировки относительного вращения между выходным валом двигателя 2 и входным валом бесступенчатой трансмиссии 4. Заданная скорость V1 может составлять, например, 14 км/ч.
Бесступенчатая трансмиссия 4 обеспечена механизмом 11 переключения переднего/заднего хода, первичным шкивом 12, вторичным шкивом 13 и ремнем 14, проходящим через первичный шкив 12 и вторичный шкив 13. Ширина канавок первичного шкива 12 и вторичного шкива 13 изменяется путем гидравлического управления для получения требуемого передаточного отношения.
[0011] Механизм 11 переключения переднего/заднего хода обеспечен муфтой 16 переднего хода и тормозом 17 заднего хода. Муфта 16 переднего хода и тормоз 17 заднего хода представляют собой фрикционные элементы для передачи вращения, передаваемого от вторичного шкива 13, в положительном направлении (прямом направлении) и в отрицательном направлении (обратном направлении) соответственно. Муфта 16 переднего хода и тормоз 17 заднего хода соответствуют муфте, которая передает мощность между двигателем 2 и генератором 8 переменного тока и ведущими колесами 6a и 6b.
В дополнение, в бесступенчатой трансмиссии 4 обеспечен масляный насос 15, приводимый в действие двигателем 2. При работе двигателя масляный насос 15 в качестве гидравлического источника подает давление преобразователя 3 крутящего момента и давление блокировочной муфты 10.
[0012] Кроме того, масляный насос 15 в качестве гидравлического источника подает давление шкива бесступенчатой трансмиссии 4 и давление зацепления муфты для муфты 16 переднего хода и тормоза 17 заднего хода. Кроме того, бесступенчатая трансмиссия 4 обеспечена электрическим масляным насосом 18 в дополнение к масляному насосу 15 и выполнена с возможностью подачи необходимого давления масла на каждый исполнительный механизм путем активации электрического масляного насоса 18, когда остановка двигателя делает невозможной гидравлическую подачу масляным насосом 15. Таким образом, просачивание гидравлического масла может быть скомпенсировано, и давление зацепления муфты может поддерживаться даже при остановке двигателя.
[0013] Рабочее состояние двигателя 2 находится под управлением блока 20 управления двигателем. В блок 20 управления двигателем подается сигнал степени нажатия педали акселератора от датчика 24 степени открытия педали акселератора для определения степени нажатия педали 23 акселератора, выполняемого водителем. Педаль 23 акселератора является одним примером рабочего элемента, управляемого водителем для указания движущей силы транспортного средства 1. Датчик 24 степени открытия педали акселератора соответствует устройству определения степени нажатия акселератора для определения степени нажатия акселератора, которая представляет собой степень нажатия педали 23 акселератора водителем.
[0014] Кроме того, в блок 20 управления двигателем подаются сигналы скорости колес, указывающие скорости колес, определенные датчиками 29a и 29b скорости колес, обеспеченными на ведущих колесах 6a и 6b. В следующем далее описании датчики 29a и 29b скорости колес могут в общем называться «датчиками 29 скорости колес». Датчики 29 скорости колес могут быть обеспечены на колесах, отличных от ведущих колес. Далее ведущие колеса 6a и 6b и колеса, отличные от ведущих колес, могут в общем называться «колесами 6».
[0015] Кроме того, в блок 20 управления двигателем подается сигнал скорости вращения, указывающий скорость Re вращения двигателя, от датчика 2a скорости вращения для определения скорости Re вращения двигателя 2.
Кроме того, в блок 20 управления двигателем подаются сигналы для таких величин, как температура охлаждающей воды в двигателе 2, температура всасываемого воздуха, подаваемого в двигатель 2, расход потока воздуха, абсолютное давление во впускном коллекторе и угол поворота коленчатого вала. Кроме того, в блок 20 управления двигателем подается сигнал состояния трансмиссии от блока 30 управления трансмиссией, описанного ниже.
[0016] Блок 20 управления двигателем запускает двигатель 2 и управляет движущей силой двигателя 2 на основе вышеуказанных различных сигналов. Блок 20 управления двигателем вычисляет крутящий момент двигателя на основе вышеуказанных различных сигналов и определяет значение команды крутящего момента двигателя на основе результата вычисления. Блок 20 управления двигателем управляет выходным крутящим моментом двигателя 2 путем управления такими параметрами, как количество всасываемого воздуха, количество впрыскиваемого топлива и время зажигания, на основе значения команды.
В дополнение, блок 20 управления двигателем выводит сигнал значения команды выработки электрической мощности, указывающий целевое напряжение выработки электрической мощности для генератора 8 переменного тока. При нахождении транспортного средства 1 в состоянии замедления блок 20 управления двигателем повышает целевое напряжение выработки электрической мощности, сообщаемое генератору 8 переменного тока, тем самым выполняя рекуперацию энергии замедления для зарядки аккумулятора 9. С другой стороны, во время стабильного движения или ускорения блок 20 управления двигателем снижает целевое напряжение выработки электрической мощности, тем самым уменьшая выработку электрической мощности генератором 8 переменного тока.
В результате нагрузка на двигатель 2 снижается, что приводит к повышению эффективности использования топлива.
[0017] Кроме того, в блок 20 управления двигателем подается тормозной сигнал от тормозного переключателя 22 для вывода сигнала включения в соответствии с нажатием педали 21 тормоза водителем. Педаль 21 тормоза является одним примером второго рабочего элемента, управляемого водителем для указания тормозного усилия транспортного средства 1.
Перед педалью 21 тормоза обеспечены главный цилиндр 25 и главный усилитель 27. Главный усилитель 27 увеличивает тормозное усилие с помощью отрицательного давления всасывания двигателя 2. В блок 20 управления двигателем подается сигнал степени нажатия педали тормоза от датчика 26 давления главного цилиндра для определения давления главного цилиндра 25, создаваемого на основе степени нажатия педали 21 тормоза.
Вместо датчика 26 давления главного цилиндра может быть использован другой датчик, например, датчик для определения степени хода педали тормоза и силы нажатия педали тормоза или датчик для определения давления колесного цилиндра для определения степени нажатия педали тормоза, которая вводится в блок 20 управления двигателем.
[0018] С другой стороны, блок 30 управления трансмиссией принимает сигнал состояния двигателя, указывающий рабочее состояние двигателя, от блока 20 управления двигателем и передает сигнал состояния трансмиссии, указывающий состояние бесступенчатой трансмиссии 4, в блок 20 управления двигателем. Блок 30 управления трансмиссией управляет, например, передаточным отношением бесступенчатой трансмиссии 4 в соответствии с сигналами и положением рычага переключения передач.
Например, при выборе диапазоне D блок 30 управления трансмиссией подключает муфту 16 переднего хода и дополнительно определяет передаточное отношение из графика передаточных отношений на основе степени открытия педали акселератора и скорости транспортного средства для управления давлением каждого шкива.
В следующем далее описании выражение «движение в диапазоне D» означает движение вперед, во время которого транспортного средство 1 движется при удержании муфты 16 переднего хода подключенной путем выбора диапазона D и продолжении подачи топлива в двигатель 2.
[0019] Кроме того, когда скорость Vv движения транспортного средства меньше заданной скорости V1, блокировочная муфта 10 отсоединяется, но когда скорость равна или больше заданной скорости V1, блокировочная муфта подсоединяется так, что двигатель 2 и бесступенчатая трансмиссия 4 соединяются напрямую.
Блок 20 управления двигателем и блок 30 управления трансмиссией соответствуют устройствам управления для управления муфтой 16 переднего хода, тормозом 17 заднего хода и генератором 8 переменного тока.
Блок 20 управления двигателем и блок 30 управления трансмиссией могут представлять собой, например, компьютеры, включающие в себя центральный блок обработки (CPU) и периферийный компонент для CPU, например, запоминающее устройство. Соответствующие функции этих компьютеров, описанные в настоящем документе, реализуются посредством соответствующих CPU, выполняющих компьютерные программы, хранящиеся на запоминающих устройствах.
[0020] Процесс автоматической остановки двигателя
Далее будет объяснен процесс автоматической остановки двигателя 2. Процесс автоматической остановки представляет собой процесс, в ходе которого блок 20 управления двигателем автоматически останавливает двигатель 2 и перезапускает его при выполнении заданного условия.
Блок 20 управления двигателем выполняет процесс автоматической остановки на основе сигналов скорости колес от датчиков 29 скорости колес, сигнала степени нажатия педали акселератора от датчика 24 степени открытия педали акселератора, сигнала степени нажатия педали тормоза от датчика 26 давления главного цилиндра и сигнала состояния зарядки от аккумулятора 9.
Блок 20 управления двигателем, блок 30 управления трансмиссией, датчики 29 скорости колес, датчик 24 степени открытия педали акселератора и датчик 26 давления главного цилиндра настраивают устройство 40 управления движением транспортного средства для выполнения процесса автоматической остановки двигателя 2.
[0021] Фиг. 2 иллюстрирует функциональную конфигурацию устройства 40 управления движением транспортного средства. Устройство 40 управления движением транспортного средства обеспечено блоком 41 управления остановкой холостого хода, блоком 42 управления инерционным движением, блоком 43 прогнозирования эффекта снижения расхода топлива, контроллером 44 двигателя и блоком 45 управления величиной выработки электрической мощности.
Блок 41 управления остановкой холостого хода осуществляет так называемое управление остановкой холостого хода (также называемое уменьшением холостого хода), которое останавливает холостой ход двигателя при выполнении заданного условия, когда транспортное средство 1 останавливается. Подробное описание управление остановкой холостого хода опущено.
[0022] Блок 42 управления инерционным движением прекращает подачу топлива в двигатель 2 для остановки двигателя 2, отсоединяет муфту 16 переднего хода и управляет движением транспортного средства 1, причем двигатель 2 отключен от ведущих колес 6a и 6b, когда водитель не имеет намерения для ускорения во время движения транспортного средства, даже если скорость Vv движения транспортного средства больше заданной скорости V1. Выражение «инерционное движение» в настоящем документе означает движение, при котором скорость Vv движения больше заданной скорости V1, подача топлива в двигатель 2 прекращена, и двигатель 2 остается отключенным от ведущих колес 6a и 6b.
[0023] Во время инерционного движения, поскольку транспортное средство движется с отсоединенной муфтой 16 переднего хода, вращательная движущая сила ведущих колес 6a и 6b не может подаваться в генератор 8 переменного тока, и, следовательно, рекуперация энергии замедления не может быть выполнена. При малой продолжительности инерционного движения эффективность использования топлива будет снижаться, поскольку потеря энергии замедления из-за невозможности ее рекуперации превышает эффект снижения расхода топлива вследствие инерционного движения.
В связи с этим при определении, что водитель не имеет намерения для ускорения, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, при которой вращательная мощность ведущих колес 6a и 6b подается в генератор 8 переменного тока.
[0024] Когда определено, что эффект E1 снижения расхода топлива вследствие инерционного перемещение превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, блок 42 управления инерционным движением выполняет инерционное движение. Например, блок 42 управления инерционным движением выполняет инерционное движение при выполнении всех следующих условий (A1)-(A3) и запрещает инерционное движение, когда какое-либо из условий (A1)-(A3) не выполняется.
(A1) Водитель не имеет намерения для ускорения. Например, блок 42 управления инерционным движением принимает сигнал степени нажатия педали акселератора от датчика 24 степени открытия педали акселератора. По истечении времени, равного или превышающего заданное время, после снижения степени работы акселератора (т.е. степени нажатия акселератора) до нуля может быть определено, что водитель не имеет намерения для ускорения. Заданное время представляет собой период, в течение которого педаль 23 акселератора не нажимается, причем этот период установлен для определения, что водитель не имеет намерения для ускорения, и он может составлять, например, 2 секунды.
[0025] (A2) Ожидается, что эффект E1 снижения расхода топлива вследствие инерционного движения будет превосходить эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
(A3) Водитель не осуществляет операцию торможения транспортного средства 1, например, нажатие педали 21 тормоза.
Например, блок 42 управления инерционным движением может принимать сигнал степени нажатия педали тормоза от датчика 26 давления главного цилиндра для определения, что операция торможения не выполняется, когда степень нажатия педали 21 тормоза равна нулю, и что операция торможения выполняется водителем, когда степень нажатия педали 21 тормоза не равна нулю. Выполняется ли операция торможения, также может быть определено на основе тормозного сигнала от тормозного переключателя 22.
[0026] При выполнении условий (A1)-(A5), где к условиям (A1)-(A3) добавлены следующие условия (A4)-(A5), может осуществляться инерционное движение, и когда какое-либо из условий (A1)-(A5) не выполняется, инерционное движение может быть запрещено.
(A4) Скорость Vv движения равна или меньше скорости V2. Например, скорость V2 может составлять около 80 км/ч. Блок 42 управления инерционным движением может принимать сигналы скорости колес от датчиков 29 скорости колес, на основе которых блок определяет скорость Vv движения.
(A5) Выполняется заданное условие разрешения остановки холостого хода. Условие разрешения остановки холостого хода может, например, заключаться в том, что двигатель не прогревается, и что степень зарядки аккумулятора 9 равна или больше заданного значения.
[0027] С другой стороны, когда определено, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, блок 42 управления инерционным движением выполняет рекуперацию энергии замедления. Например, при выполнении всех из условий (A1), (A3) и следующего условия (B1) блок 42 управления инерционным движением выполняет рекуперацию энергии замедления, а когда какое-либо из условий (A1), (A3) и (B1) не выполняется, блок не выполняет рекуперацию энергии замедления.
(A1) Водитель не имеет намерения для ускорения.
(A3) Водитель не осуществляет операцию торможения транспортного средства 1, например, нажатие педали 21 тормоза.
(B1) Спрогнозировано, что эффект E1 снижения расхода топлива вследствие инерционного движения не будет превосходить эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0028] При начале инерционного движения блок 42 управления инерционным движением выводит команду начала инерционного движения в контроллер 44 двигателя.
Когда контроллер 44 двигателя принимает команду начала инерционного движения, он прекращает впрыск топлива устройством впрыска топлива для прекращения подачи топлива в двигатель 2. Кроме того, контроллер 44 двигателя выводит команду запрета работы для электрического масляного насоса 18 в бесступенчатую трансмиссию 4. Поскольку работа масляного насоса 15 прекращена из-за остановки двигателя 2, и в дополнение прекращена работа электрического масляного насоса 18, муфта 16 переднего хода в механизме 11 переключения переднего/заднего хода отсоединяется. В результате двигатель 2 отключается от ведущих колес 6a и 6b. В дополнение блокировочная муфта 10 также отсоединяется. В результате состояние движения транспортного средства 1 переключается с движения в диапазоне D на инерционное движение.
[0029] При начале рекуперации энергии замедления блок 42 управления инерционным движением выводит команду начала рекуперации в контроллер 44 двигателя и блок 45 управления величиной выработки электрической мощности.
После приема команды начала рекуперации контроллер 44 двигателя прекращает впрыск топлива устройством впрыска топлива для прекращения подачи топлива в двигатель 2. Альтернативно контроллер 44 двигателя снижает величину впрыска топлива.
Контроллер 44 двигателя активирует электрический масляной насос 18 для поддержания муфты 16 переднего хода механизма 11 переключения переднего/заднего хода. Таким образом, поддерживается соединение двигателя 2 с ведущими колесами 6a и 6b, и вращательная движущая сила колес 6a и 6b подается в генератор 8 переменного тока.
Далее после приема команды начала рекуперации блок 45 управления величиной выработки электрической мощности выводит в генератор 8 переменного тока сигнал значения команды выработки электрической мощности, который повышает целевое напряжение выработки электрической мощности генератора 8 переменного тока. Вращательная движущая сила ведущих колес 6a и 6b подается в генератор 8 переменного тока, и целевое напряжение выработки электрической мощности, сообщаемое генератору 8 переменного тока, повышается, и тем самым выполняется рекуперация энергии замедления для зарядки аккумулятора 9.
[0030] Во время инерционного движения блок 42 управления инерционным движением определяет, выполняется ли заданное условие остановки. Условие остановки выполняется, например, при выполнении любого из следующих двух условий (C1) и (C2).
(C1) Водитель имеет намерение для ускорения.
(C2) Водитель осуществляет операцию торможения транспортного средства 1.
При выполнении условия остановки блок 42 управления инерционным движением останавливает инерционное движение. Когда в качестве условия начала инерционного движения выбрано условие (A5), инерционное движение может быть остановлено, когда условие (A5) не выполняется.
При остановке инерционного движения блок 42 управления инерционным движением выводит команду остановки инерционного движения в контроллер 44 двигателя. После приема команды остановки инерционного движения контроллер 44 двигателя перезапускает впрыск топлива и приводит в действие мотор 7 для выполнения запуска двигателя. После перезапуска двигателя 2 масляный насос 15 работает для подсоединения муфты 16 переднего хода в механизме 11 переключения переднего/заднего хода. Таким образом, перезапуск двигателя и повторное подсоединение муфты 16 переднего хода завершаются, и состояние движения транспортного средства 1 переключается с инерционного движения на движение в диапазоне D.
[0031] С другой стороны, во время рекуперации энергии замедления блок 42 управления инерционным движением определяет, имеет ли водитель намерение для ускорения. Когда водитель имеет намерение для ускорения, блок 42 управления инерционным движением останавливает рекуперацию энергии замедления.
Когда блок 42 управления инерционным движением останавливает рекуперацию энергии замедления, он выводит команду остановки рекуперации в контроллер 44 двигателя и блок 45 управления величиной выработки электрической мощности. После приема команды остановки рекуперации контроллер 44 двигателя перезапускает впрыск топлива в двигатель 2. Блок 45 управления величиной выработки электрической мощности выводит сигнал значения команды выработки электрической мощности для снижения целевого напряжения выработки электрической мощности в генератор 8 переменного тока для снижения выработки электрической мощности генератором 8 переменного тока и тем самым снижает нагрузку на двигатель 2. Таким образом, рекуперация энергии замедления завершается.
[0032] Работа
Далее будет объяснен один примерный процесс работы устройства 40 управления движением транспортного средства в соответствии с первым вариантом выполнения. Смотри Фиг. 3.
На этапе S10 блок 42 управления инерционным движением определяет, имеет ли водитель намерение для ускорения. Если водитель имеет намерение для ускорения (этап S10: Да), процесс возвращается на этап S10. В этом случае инерционное движение и рекуперация энергии замедления не начинаются. Если водитель не имеет намерения для ускорения (этап S10: Нет), процесс переходит на этап S11.
На этапе S11 блок 42 управления инерционным движением определяет, выполнил ли водитель операцию торможения. Если операция торможения была выполнена (этап S11: Да), процесс возвращается на этап S10. В этом случае инерционное движение и рекуперация энергии замедления не начинаются. Если операция торможения не была выполнена (этап S11: Нет), процесс переходит на этап S12.
[0033] На этапе S12 блок 43 прогнозирования эффекта снижения расхода топлива определяет, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Если эффект E1 снижения расхода топлива превосходит эффект E2 снижения расхода топлива (этап S12: Да), процесс переходит на этап S13.
Если эффект E1 снижения расхода топлива не превосходит эффект E2 снижения расхода топлива (этап S12: Нет), процесс переходит на этап S14.
На этапе S13 блок 42 управления инерционным движением выполняет инерционное движение. Затем процесс завершается.
На этапе S14 блок 42 управления инерционным движением выполняет рекуперацию энергии замедления. Затем процесс завершается.
[0034] Эффект первого варианта выполнения
Блок 42 управления инерционным движением определяет намерение водителя для ускорения во время движения транспортного средства 1. При определении, что водитель не имеет намерения для ускорения, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, какой из эффекта E1 снижения расхода топлива вследствие инерционного движения и эффекта E2 снижения расхода топлива вследствие рекуперации энергии замедления превышает другой, причем инерционное движение вызывает движение транспортного средства 1 при отключенной передаче мощности между двигателем 2 и ведущими колесами 6a и 6b транспортного средства 1, и рекуперация энергии замедления подает вращательную мощность ведущих колес 6a и 6b транспортного средства 1 в генератор 8 переменного тока. Если блок 42 управления инерционным движением определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, он выполняет инерционное движение. Если блок 42 управления инерционным движением определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, он выполняет рекуперацию энергии замедления.
В связи с этим может быть предотвращено снижение эффективности использования топлива, которое возникает, когда продолжительность инерционного движения мала, и, следовательно, потеря энергии замедления из-за невозможности ее рекуперации превышает эффект снижения расхода топлива вследствие инерционного движения.
[0035] Модифицированный пример
(1) Устройство 40 управления движением транспортного средства также может быть применено в отношении транспортных средств с автоматической трансмиссией, имеющей тип, отличный от бесступенчатой трансмиссии 4. Например, устройство 40 управления движением транспортного средства также может быть применено в отношении транспортных средств с автоматической трансмиссией, относящейся к типу с парой шестерен с параллельной осью. Кроме того, устройство 40 управления движением транспортного средства может быть применено не только в отношении транспортных средств, обеспеченных только двигателем внутреннего сгорания в качестве приводного источника, но и в отношении гибридных транспортных средств.
(2) Во время инерционного движения устройство 40 управления движением транспортного средства может выводить в бесступенчатую трансмиссию 4 сигнал отсоединения для активного отсоединения муфты 16 переднего хода вместо команды запрета работы для электрического масляного насоса 18.
[0036] Второй вариант выполнения
Далее будет объяснен второй вариант выполнения. При высокой скорости Vv движения транспортного средства 1 считается, что транспортное средство 1 движется в стабильном состоянии, и что инерционное движение будет длиться относительно долго после начала инерционного движения. В связи с этим считается, что эффект E1 снижения расхода топлива вследствие инерционного движения увеличивается по мере увеличения скорости Vv движения транспортного средства 1. В связи с этим устройство 40 управления движением транспортного средства в соответствии со вторым вариантом выполнения прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления на основе скорости Vv движения транспортного средства 1.
Конфигурация устройства 40 управления движением транспортного средства в соответствии со вторым вариантом выполнения является такой же, как в первом варианте выполнения, описанном со ссылкой на Фиг. 2.
[0037] Блок 43 прогнозирования эффекта снижения расхода топлива принимает сигналы скорости колес от датчиков 29 скорости колес. При определении, что водитель не имеет намерения для ускорения, блок 43 прогнозирования эффекта снижения расхода топлива определяет скорость Vv движения транспортного средства 1 на основе сигналов скорости колес. Блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость Vv движения равна или больше заданного порогового значения Vt скорости. Блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость Vv движения меньше заданного порогового значения скорости. Заданное пороговое значение Vt скорости может составлять, например, 50 км/ч.
[0038] Далее будет объяснен пример процесса работы устройства 40 управления движением транспортного средства в соответствии со вторым вариантом выполнения. Смотри Фиг. 4.
Процесс с этапа S20 до этапа S21 является таким же, как процесс с этапа S10 до этапа S11, описанный со ссылкой на Фиг. 3. Если операция торможения не выполнена (этап S21: Нет), процесс переходит на этап S22.
На этапе S22 блок 43 прогнозирования эффекта снижения расхода топлива определяет скорость Vv движения при определении, что водитель не имеет намерения для ускорения.
[0039] На этапе S23 блок 43 прогнозирования эффекта снижения расхода топлива определяет, равна ли скорость Vv движения или выше порогового значения скорости. Если скорость Vv движения равна или выше порогового значения скорости (этап S23: Да), процесс переходит на этап S24. Если скорость Vv движения меньше порогового значения скорости (этап S23: Нет), процесс переходит на этап S25.
Процесс с этапа S24 до этапа S25 является таким же, как процесс с этапа S13 до этапа S14, описанный со ссылкой на Фиг. 3.
[0040] Эффект второго варианта выполнения
Блок 43 прогнозирования эффекта снижения расхода топлива определяет скорость Vv движения транспортного средства 1 при определении, что водитель не имеет намерения для ускорения. Если скорость Vv движения равна или выше порогового значения Vt скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Если скорость Vv движения меньше порогового значения Vt скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
В связи с этим можно сравнительно простым способом прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, для выбора соответствующего из инерционного движения и рекуперации энергии замедления.
[0041] Модифицированный пример
(1) Когда скорость Vv движения опускается до или ниже порогового значения Vt скорости во время инерционного движения, и состояние транспортного средства 1 переключается с инерционного движения на рекуперацию энергии замедления, водитель может ощущать дискомфорт из-за изменения поведения транспортного средства. В связи с этим, после того, как транспортное средство 1 со скоростью Vv движения, равной или превышающей пороговое значение Vt скорости, начинает инерционное движение, блок 42 управления инерционным движением может продолжать инерционное движение, когда скорость Vv движения опускается ниже порогового значения Vt скорости во время этого инерционного движения. Таким образом, чувство дискомфорта водителя может быть предотвращено путем предотвращения переключения состояния транспортного средства 1 с инерционного движения на рекуперацию энергии замедления.
(2) Когда скорость Vv движения возрастает до порогового значения Vt скорости или выше во время рекуперации энергии замедления на нисходящем уклоне, и состояние транспортного средства 1 переключается с рекуперации энергии замедления на инерционное движение, водитель может ощущать дискомфорт из-за изменения поведения транспортного средства. В связи с этим после того, как транспортное средство 1 со скоростью Vv движения ниже порогового значения Vt скорости начинает рекуперацию энергии замедления, блок 42 управления инерционным движением может продолжать рекуперацию энергии замедления, когда скорость Vv движения возрастает до порогового значения Vt скорости или выше во время этой рекуперации энергии замедления, выполняемой на нисходящем уклоне. Таким образом, чувство дискомфорта водителя может быть предотвращено путем предотвращения переключения состояния транспортного средства 1 с рекуперации энергии замедления на инерционное движение.
[0042] Третий вариант выполнения
Далее будет объяснен третий вариант выполнения. Когда водитель выполняет операцию ускорения и операцию торможения, инерционное движение прекращается. Кроме того, когда транспортное средство 1 останавливается, инерционное движение прекращается. Соответственно, при наличии объекта, который может являться фактором остановки для остановки инерционного движения, вызывая операцию ускорения или операцию торможения или останавливая транспортное средство 1, продолжительность инерционного движения меняется в зависимости от расстояния и относительной скорости между объектом и транспортным средством 1.
В связи с этим устройство 40 управления движением транспортного средства в соответствии с третьим вариантом выполнения определяет расстояние и относительную скорость между транспортным средством 1 и объектом, который может являться фактором остановки для инерционного движения, при определении, что водитель не имеет намерения для ускорения. Устройство 40 управления движением транспортного средства прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с определенным расстоянием и относительной скоростью. В следующем далее описании объект, который может представлять собой фактор остановки для инерционного движения, может называться просто «объектом».
[0043] Например, в зависимости от одного параметра из расстояния до объекта и относительной скорости устройство 40 управления движением транспортного средства определяет пороговое значение другого параметра из расстояния до объекта и относительной скорости. Таким образом, устройство 40 управления движением транспортного средства прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с результатом сравнения определенного таким образом порогового значения с другим параметром из расстояния до объекта и относительной скорости.
[0044] Другими словами, устройство 40 управления движением транспортного средства определяет пороговое значение относительной скорости относительно объекта в соответствии с расстоянием до объекта; когда относительная скорость относительно объекта меньше порогового значения, устройство определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления; когда относительная скорость относительно объекта равна или больше порогового значения, устройство определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
Альтернативно устройство 40 управления движением транспортного средства определяет пороговое значение расстояния до объекта в соответствии с относительной скоростью относительно объекта; когда расстояние до объекта превышает пороговое значение, устройство определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления; когда расстояние до объекта равно или меньше порогового значения, устройство определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
Альтернативно когда отношение, представляющее собой расстояние до объекта, поделенное на относительную скорость, превышает пороговое значение, устройство 40 управления движением транспортного средства может определять, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления; когда отношение равно или меньше порогового значения, устройство может определять, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0045] Конфигурация
Фактор остановки для инерционного движения может представлять собой, например, фактор, который вызывает операцию торможения транспортного средства 1 водителем. Кроме того, фактор остановки для инерционного движения может представлять собой, например, фактор, который вызывает операцию ускорения транспортного средства 1 водителем.
Один пример объекта, который может быть фактором остановки для инерционного движения, представляет собой следующий впереди автомобиль, движущийся перед транспортным средством 1. Это связано с тем, что при наличии следующего впереди автомобиля транспортное средство 1 прекращает инерционное движение из-за нажатия педали 21 тормоза при приближении к следующему впереди автомобилю и последующего повторного ускорения.
Один пример устройства 40 управления движением транспортного средства в соответствии с третьим вариантом выполнения прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dv между транспортными средствами и относительной скоростью Vr относительно следующего впереди автомобиля, движущегося перед транспортным средством 1.
Смотри Фиг. 5. Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 1. Транспортное средство 1 обеспечено блоком 50 измерения расстояния для измерения расстояния Dv между транспортным средством 1 и следующим впереди автомобилем и блоком 51 измерения относительной скорости для измерения относительной скорости Vr. Далее расстояние Dv между транспортными средствами и относительная скорость Vr относительно следующего впереди автомобиля могут быть назваться «расстоянием Dv между транспортными средствами» и «относительной скоростью Vr» соответственно.
Блок 50 измерения расстояния и блок 51 измерения относительной скорости могут представлять собой, например, радиолокационные устройства, например, лазерные радары и радары миллиметрового диапазона, для сканирования области перед транспортным средством. Блок 50 измерения расстояния может представлять собой устройство формирования изображения для формирования изображения области перед транспортным средством и устройство обработки информации для вычисления расстояния Dv между транспортными средствами на основе изображения области. Блок 51 измерения относительной скорости может представлять собой устройство обработки информации для вычисления временного изменения расстояния Dv между транспортными средствами, вычисленного на основе изображения области, в качестве относительной скорости Vr.
[0046] Фиг. 6 иллюстрирует функциональную конфигурацию устройства 40 управления движением транспортного средства в соответствии с третьим вариантом выполнения.
Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 2. Устройство 40 управления движением транспортного средства обеспечено блоком 46 определения порогового значения для определения порогового значения Vrt относительной скорости, которое представляет собой пороговое значение относительной скорости Vr, в соответствии с расстоянием Dv между транспортными средствами.
Блок 46 определения порогового значения определяет, например, на основе графика, проиллюстрированного на Фиг. 7, пороговое значение Vrt относительной скорости в соответствии с расстоянием Dv между следующим впереди автомобилем и транспортным средством 1 при определении, что водитель не имеет намерения для ускорения. Этот график может быть определен заранее, например, в ходе эксперимента, и сохранен на запоминающем устройстве, обеспеченном в блоке 20 управления двигателем.
[0047] На этом графике для расстояния Dv между транспортными средствами задано расстояние D1, которое удовлетворяет выражению 0<D1. Расстояние D1 задано так, что, когда расстояние Dv между транспортными средствами меньше или равно D1, эффект E1 снижения расхода топлива не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления независимо от относительной скорости Vr. Когда расстояние Dv между транспортными средствами находится в диапазоне от 0 до D1 включительно, пороговое значение Vrt относительной скорости равно 0 независимо от расстояния Dv между транспортными средствами. Когда расстояние Dv между транспортными средствами находится в диапазоне, превышающем D1, пороговое значение Vrt относительной скорости больше для большего расстояния Dv между транспортными средствами.
[0048] Вместо использования графика, проиллюстрированного на Фиг. 7, блок 46 определения порогового значения может использовать заданную формулу для вычисления порогового значения Vrt относительной скорости в соответствии с расстоянием Dv между транспортными средствами, на основе которой должно быть определено пороговое значение Vrt относительной скорости.
Когда относительная скорость Vr меньше порогового значения Vrt относительной скорости при определении, что водитель не имеет намерения для ускорения, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда относительная скорость Vr равна или выше порогового значения Vrt относительной скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
Работа
Далее будет объяснен пример процесса работы устройства 40 управления движением транспортного средства в соответствии с третьим вариантом выполнения. Смотри Фиг. 8.
Процесс с этапа S30 до этапа S31 является таким же, как процесс с этапа S10 до этапа S11, описанный со ссылкой на Фиг. 3. Если операция торможения не выполнена (этап S31: Нет), процесс переходит на этап S32.
На этапе S32 блок 50 измерения расстояния определяет расстояние Dv между транспортными средствами при определении, что водитель не имеет намерения для ускорения.
[0049] На этапе S33 блок 46 определения порогового значения определяет пороговое значение Vrt относительной скорости в соответствии с расстоянием Dv между транспортными средствами. На этапе S34 блок 51 измерения относительной скорости определяет относительную скорость Vr, если определено, что водитель не имеет намерения для ускорения. Процесс на этапе S33 может выполняться после процесса на этапе S34.
На этапе S35 блок 43 прогнозирования эффекта снижения расхода топлива определяет, является ли относительная скорость Vr ниже порогового значения Vrt относительной скорости. Если относительная скорость Vr меньше порогового значения Vrt относительной скорости (этап S35: Да), процесс переходит на этап S36. Если относительная скорость Vr равна или выше порогового значения Vrt относительной скорости (этап S35: Нет), процесс переходит на этап S37.
Процесс с этапа S36 до этапа S37 является таким же, как процесс с этапа S13 до этапа S14, описанный со ссылкой на Фиг. 3.
[0050] Эффект третьего варианта выполнения
(1) Блок 50 измерения расстояния и блок 51 измерения относительной скорости определяют расстояние и относительную скорость между транспортным средством 1 и объектом, который может быть фактором остановки для инерционного движения, при определении, что водитель не имеет намерения для ускорения. Блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с определенным расстоянием и относительной скоростью.
В связи с этим при наличии фактора остановки для инерционного движения можно прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и выбирать соответствующее одно из инерционного движения и рекуперации энергии замедления.
[0051] (2) В соответствии с одним параметром из расстояния и относительной скорости между транспортным средством 1 и объектом, который может быть фактором остановки для инерционного движения, при определении, что водитель не имеет намерения для ускорения, блок 46 определения порогового значения определяет пороговое значение другого параметра из расстояния и относительной скорости. Блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с результатом сравнения определенного порогового значения с другим параметром из расстояния и относительной скорости.
В связи с этим на основе расстояния и относительной скорости между транспортным средством 1 и объектом, который может быть фактором остановки для инерционного движения, можно прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и выбирать соответствующее одно из инерционного движения и рекуперации энергии замедления.
[0052] (3) При наличии следующего впереди автомобиля, движущегося перед транспортным средством 1, в качестве объекта, который может быть фактором остановки для инерционного движения, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dv между транспортными средствами и относительной скоростью Vr между следующим впереди автомобилем и транспортным средством 1.
В связи с этим при наличии следующего впереди автомобиля, движущегося перед транспортным средством 1, можно прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и выбирать соответствующее одно из инерционного движения и рекуперации энергии замедления.
[0053] Модифицированный пример
блок 46 определения порогового значения может определять пороговое значение D расстояния Dv между транспортными средствами в соответствии с относительной скоростью Vr. Когда расстояние Dv между транспортными средствами больше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда расстояние Dv между транспортными средствами меньше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0054] Четвертый вариант выполнения
Далее будет объяснен четвертый вариант выполнения. Фактор остановки для инерционного движения может представлять собой, например, фактор, который останавливает транспортное средство 1. Один пример объекта, который может быть фактором остановки для инерционного движения из-за остановки транспортного средства 1, представляет собой красный сигнал светофора.
Устройство 40 управления движением транспортного средства в соответствии с четвертым вариантом выполнения прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dr между транспортным средством 1 и красным сигналом светофора на маршруте транспортного средства 1 и скоростью Vv движения транспортного средства 1, которая представляет собой относительную скорость между красным сигналом светофора и транспортным средством 1.
[0055] Конфигурация
Смотри Фиг. 9. Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 1. Транспортное средство 1 обеспечено блоком 52 обнаружения светофора для определения расстояния Dr до красного сигнала светофора впереди по маршруту транспортного средства 1.
Блок 52 обнаружения светофора представлен, например, устройством позиционирования, например, устройством системы глобального позиционирования (GPS) или инерциальным навигационным устройством, для определения текущего положения транспортного средства 1, устройством обработки информации, например, навигационным устройством, для хранения информации о положении светофоров на дорогах, и приемником для приема состояний светофоров на дорогах посредством связи между дорожной инфраструктурой и транспортным средством или связи между транспортными средствами.
Кроме того, блок 52 обнаружения светофора может представлять собой устройство формирования изображения для формирования изображения области перед транспортным средством и устройство обработки информации для вычисления расстояния Dr до красного сигнала светофора впереди по маршруту транспортного средства 1 на основе изображения области.
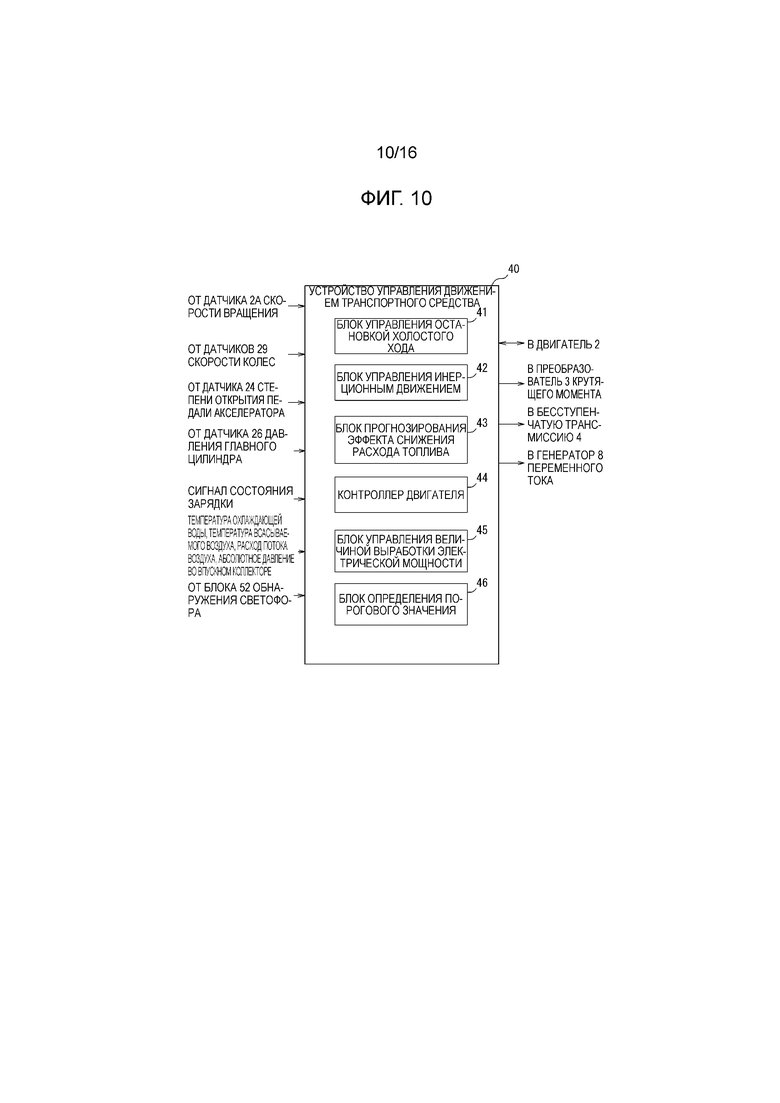
[0056] Фиг. 10 иллюстрирует функциональную конфигурацию устройства 40 управления движением транспортного средства в соответствии с четвертым вариантом выполнения. Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 2.
Когда скорость Vv движения транспортного средства 1 ниже фиксированного первого порогового значения Vt1 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, независимо от расстояния Dr до красного сигнала светофора. В результате, когда скорость Vv движения меньше первого порогового значения Vt1 скорости, блок 42 управления инерционным движением выполняет рекуперацию энергии замедления независимо от расстояния Dr.
[0057] Устройство 40 управления движением транспортного средства обеспечено блоком 46 определения порогового значения для определения переменного второго порогового значения Vt2 скорости, которое представляет собой пороговое значение скорости Vv движения, в соответствии с расстоянием Dr до красного сигнала светофора.
Блок 46 определения порогового значения определяет, например, на основе графика, проиллюстрированного на Фиг. 11, второе пороговое значение Vt2 скорости в соответствии с расстоянием Dr от транспортного средства 1 до красного сигнала светофора при определении, что водитель не имеет намерения для ускорения. Этот график может быть определен заранее, например, в ходе эксперимента, и сохранен на запоминающем устройстве, обеспеченном в блоке 20 управления двигателем.
[0058] На этом графике для расстояния Dr до красного сигнала светофора задано расстояние D2, которое удовлетворяет выражению 0<D2. Расстояние D2 задано так, что, когда расстояние Dr равно или меньше D2, эффект E1 снижения расхода топлива не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления независимо от скорости Vv движения. Когда расстояние Dr находится в диапазоне от 0 до D2 включительно, второе пороговое значение Vt2 скорости равно 0 независимо от расстояния Dr. Когда расстояние Dr находится в диапазоне, превышающем D2, второе пороговое значение Vt2 скорости увеличивается с первого порогового значения Vt1 скорости по мере увеличения расстояния Dr.
[0059] Вместо использования графика, проиллюстрированного на Фиг. 11, блок 46 определения порогового значения может использовать заданную формулу для вычисления второго порогового значения Vt2 скорости в соответствии с расстоянием Dr до красного сигнала светофора, на основе которой должно быть определено второе пороговое значение Vt2 скорости.
Когда скорость Vv движения ниже второго порогового значения Vt2 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда скорость Vv движения равна или больше второго порогового значения Vt2 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0060] Работа
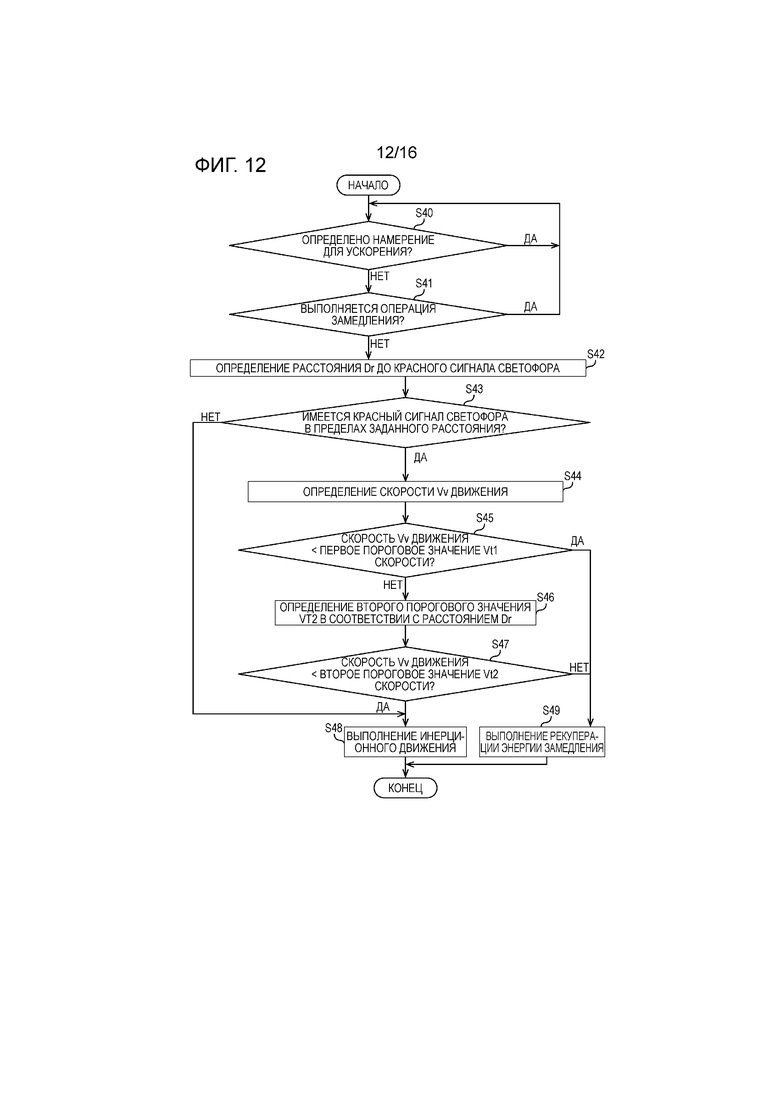
Далее будет объяснен пример процесса работы устройства 40 управления движением транспортного средства в соответствии с четвертым вариантом выполнения. Смотри Фиг. 12.
Процесс с этапа S40 до этапа S41 является таким же, как процесс с этапа S10 до этапа S11, описанный со ссылкой на Фиг. 3. Если операция торможения не выполнена (этап S41: Нет), процесс переходит на этап S42.
На этапе S42 блок 52 обнаружения светофора определяет расстояние Dr до красного сигнала светофора от транспортного средства 1 при определении, что водитель не имеет намерения для ускорения. На этапе S43 блок 43 прогнозирования эффекта снижения расхода топлива определяет, имеется ли красный сигнал светофора в пределах заданного расстояния. При наличии красного сигнала светофора в пределах заданного расстояния (этап S43: Да), процесс переходит на этап S44.
При отсутствии красного сигнала светофора в пределах заданного расстояния (этап S43: Нет), блок 43 прогнозирования эффекта снижения расхода топлива определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и процесс переходит на этап S48.
[0061] На этапе S44 блок 43 прогнозирования эффекта снижения расхода топлива определяет скорость Vv движения при определении, что водитель не имеет намерения для ускорения. На этапе S45 блок 43 прогнозирования эффекта снижения расхода топлива определяет, является ли скорость Vv движения меньше первого порогового значения Vt1 скорости. Если скорость Vv движения меньше первого порогового значения Vt1 скорости (этап S45: Да), блок 43 прогнозирования эффекта снижения расхода топлива определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и процесс переходит на этап S49. Если скорость Vv движения равна или больше первого порогового значения Vt1 скорости (этап S45: Нет), процесс переходит на этап S46.
На этапе S46 блок 46 определения порогового значения определяет второе пороговое значение Vt2 скорости в соответствии с расстоянием Dr до красного сигнала светофора.
[0062] На этапе S47 блок 43 прогнозирования эффекта снижения расхода топлива определяет, является ли скорость Vv движения меньше второго порогового значения Vt2 скорости. Если скорость Vv движения меньше второго порогового значения Vt2 скорости (этап S47: Да), процесс переходит на этап S48.
Если скорость Vv движения равна или больше второго порогового значения Vt2 скорости (этап S47: Нет), процесс переходит на этап S49.
Процесс с этапа S48 до этапа S49 является таким же, как процесс с этапа S13 до этапа S14, описанный со ссылкой на Фиг. 3.
[0063] Эффект четвертого варианта выполнения
(1) При наличии красного сигнала светофора в качестве объекта, который может быть фактором остановки для инерционного движения, на маршруте транспортного средства 1, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dr между транспортным средством 1 и красным сигналом светофора и скоростью Vv движения транспортного средства 1, которая представляет собой относительную скорость между красным сигналом светофора и транспортным средством 1.
В связи с этим при наличии красного сигнала светофора на маршруте транспортного средства 1 можно прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и выбирать соответствующее одно из инерционного движения и рекуперации энергии замедления.
[0064] Модифицированный пример
Блок 46 определения порогового значения может определять пороговое значение D расстояния Dr до красного светофора в соответствии со скоростью Vv движения. Когда расстояние Dr больше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда расстояние Dr равно или меньше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0065] Пятый вариант выполнения
Далее будет объяснен пятый вариант выполнения. При повороте транспортного средства 1 направо или налево на перекрестке инерционное движение прекращается при выполнении операции торможения транспортного средства 1 водителем. Альтернативно, инерционное движение прекращается из-за повторного ускорения транспортного средства 1 после выполнения поворота направо или поворота налево.
Соответственно, когда запланированный маршрут транспортного средства 1 заранее установлен навигационным устройством, перекресток, на котором транспортное средство 1 будет поворачивать направо или налево по запланированному маршруту транспортного средства 1, может быть определен в качестве фактора остановки для инерционного движения.
Устройство 40 управления движением транспортного средства в соответствии с пятым вариантом выполнения прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dt между транспортным средством 1 и перекрестком, на котором транспортное средство 1 будет поворачивать направо или налево по запланированному маршруту транспортного средства 1, и скоростью Vv движения транспортного средства 1, которая представляет собой относительную скорость между перекрестком и транспортным средством 1.
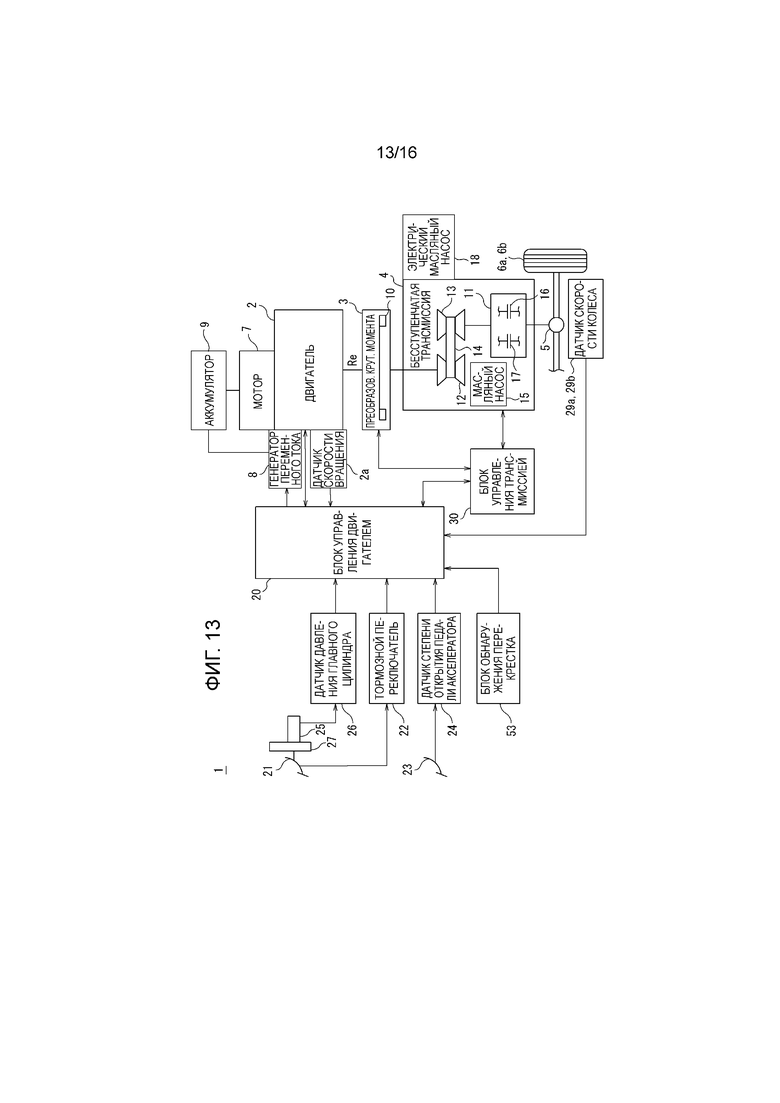
[0066] Конфигурация
Смотри Фиг. 13. Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 1. Транспортное средство 1 обеспечено блоком 53 обнаружения перекрестка для определения расстояния Dt между транспортным средством 1 и перекрестком, на котором транспортное средство 1 будет поворачивать направо или налево по запланированному маршруту транспортного средства 1.
Блок 53 обнаружения перекрестка представлен, например, устройством позиционирования, например, устройством GPS (системы глобального позиционирования) или инерциальным навигационным устройством, для определения текущего положения транспортного средства 1 и устройством обработки информации, например, навигационным устройством, которое включает в себя картографическую базу данных, включающую информацию о положение перекрестка, и выполняет поиск маршрута и ведение по маршруту для транспортного средства 1. Блок 53 обнаружения перекрестка определяет положение перекрестка, на котором транспортное средство 1 будет поворачивать направо или налево по запланированному маршруту транспортного средства 1, заданному в соответствии с поиском маршрута, и вычисляет расстояние Dt между перекрестком и транспортным средством 1 на основе положения перекрестка и текущего положения транспортного средства 1.
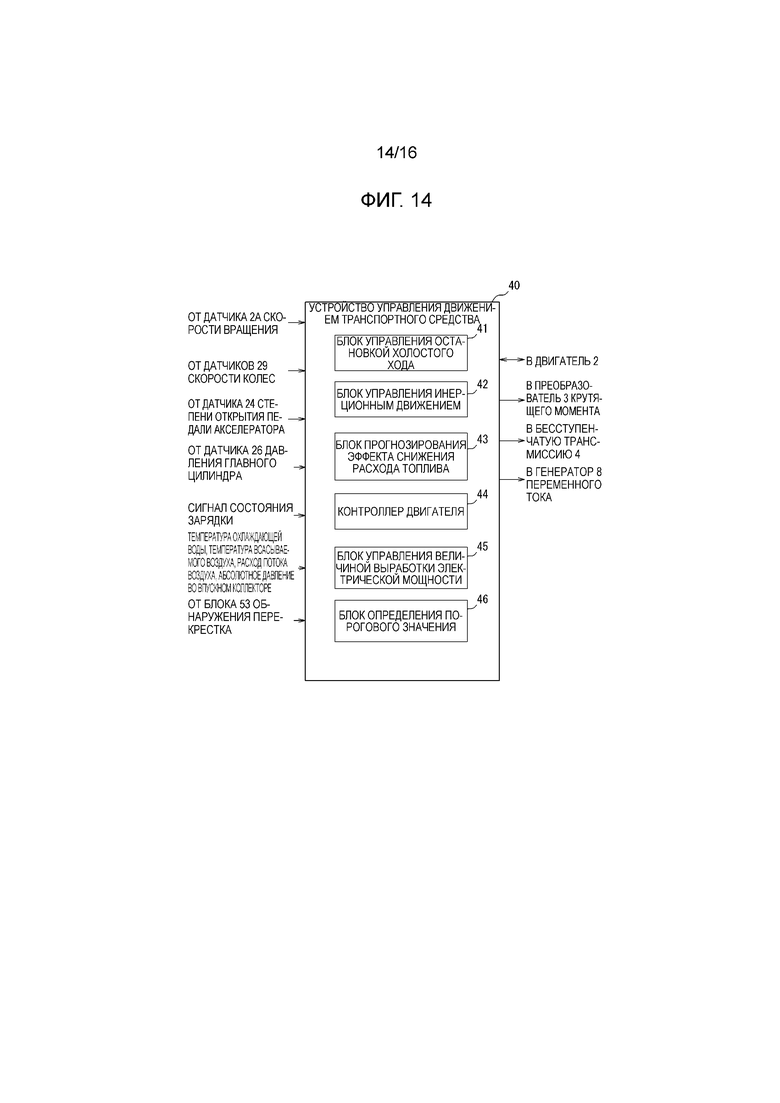
[0067] Фиг. 14 иллюстрирует функциональную конфигурацию устройства 40 управления движением транспортного средства в соответствии с пятым вариантом выполнения. Те же ссылочные позиции использованы для обозначения тех же компонентов, что и в первом варианте выполнения, описанном со ссылкой на Фиг. 2.
Когда скорость Vv движения транспортного средства 1 меньше фиксированного третьего порогового значения Vt3 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, независимо от расстояния Dt до перекрестка, на котором следует повернуть направо или налево. В результате, когда скорость Vv движения меньше третьего порогового значения Vt3 скорости, блок 42 управления инерционным движением выполняет рекуперацию энергии замедления независимо от расстояния Dt.
[0068] Устройство 40 управления движением транспортного средства обеспечено блоком 46 определения порогового значения для определения переменного второго порогового значения Vt2 скорости, которое представляет собой пороговое значение скорости Vv движения, в соответствии с расстоянием Dt до перекрестка, на котором следует повернуть направо или налево.
Блок 46 определения порогового значения определяет, например, на основе графика, проиллюстрированного на Фиг. 15, второе пороговое значение Vt2 скорости в соответствии с расстоянием Dt от транспортного средства 1 до перекрестка, на котором следует повернуть направо или налево, при определении, что водитель не имеет намерения для ускорения. Этот график может быть определен заранее, например, в ходе эксперимента, и сохранен на запоминающем устройстве, обеспеченном в блоке 20 управления двигателем.
[0069] На этом графике для расстояния Dt до перекрестка, на котором следует повернуть направо или налево, задано расстояние D3, которое удовлетворяет выражению 0<D3. Расстояние D3 задано так, что, когда расстояние Dt равно или меньше D3, эффект E1 снижения расхода топлива не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления независимо от скорости Vv движения. Когда расстояние Dt находится в диапазоне от 0 до D3 включительно, второе пороговое значение скорости Vt2 равно 0 независимо от расстояния Dt. Когда расстояние Dt находится в диапазоне, превышающем D3, второе пороговое значение Vt2 скорости увеличивается с третьего порогового значения Vt3 скорости по мере увеличения расстояния Dt.
[0070] Вместо использования графика, проиллюстрированного на Фиг. 15, для вычисления второго порогового значения Vt2 скорости может быть использована заданная формула, на основе которой должно быть определено второе пороговое значение Vt2 скорости в соответствии с расстоянием Dt до перекрестка, на котором следует повернуть направо или налево.
Когда скорость Vv движения меньше второго порогового значения Vt2 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда скорость Vv движения равна или больше второго порогового значения Vt2 скорости, блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0071] Работа
Далее будет объяснен пример процесса работы устройства 40 управления движением транспортного средства в соответствии с пятым вариантом выполнения. Смотри Фиг. 16.
Процесс с этапа S50 до этапа S51 является таким же, как процесс с этапа S10 до этапа S11, описанный со ссылкой на Фиг. 3. Если операция торможения не выполнена (этап S51: Нет), процесс переходит на этап S52.
На этапе S52 блок 53 обнаружения перекрестка определяет расстояние Dt от транспортного средства 1 до перекрестка, на котором следует повернуть направо или налево, при определении, что водитель не имеет намерения для ускорения. На этапе S53 блок 43 прогнозирования эффекта снижения расхода топлива определяет, имеется ли перекресток, на котором следует повернуть направо или налево, в пределах заданного расстояния. При наличии перекрестка в пределах заданного расстояния (этап S53: Да), процесс переходит на этап S54. При отсутствии перекрестка в пределах заданного расстояния (этап S53: Нет), блок 43 прогнозирования эффекта снижения расхода топлива определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и процесс переходит на этап S58.
[0072] На этапе S54 блок 43 прогнозирования эффекта снижения расхода топлива определяет скорость Vv движения при определении, что водитель не имеет намерения для ускорения. На этапе S55 блок 43 прогнозирования эффекта снижения расхода топлива определяет, является ли скорость Vv движения меньше третьего порогового значения Vt3 скорости. Если скорость Vv движения меньше третьего порогового значения Vt3 скорости (этап S55: Да), блок 43 прогнозирования эффекта снижения расхода топлива определяет, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и процесс переходит на этап S59. Если скорость Vv движения равна или больше третьего порогового значения Vt3 скорости (этап S55: Нет), процесс переходит на этап S56.
На этапе S56 блок 46 определения порогового значения определяет второе пороговое значение Vt2 скорости в соответствии с расстоянием Dt до перекрестка, на котором следует повернуть направо или налево.
Процесс с этапа S57 до этапа S59 является таким же, как процесс с этапа S47 до этапа S49, описанный со ссылкой на Фиг. 12.
[0073] Эффект пятого варианта выполнения
(1) Перекресток, на котором транспортное средство 1 будет поворачивать направо или налево по запланированному маршруту транспортного средства 1, определен в качестве объекта, который может быть фактором остановки для инерционного движения. Блок 43 прогнозирования эффекта снижения расхода топлива прогнозирует, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с расстоянием Dt между транспортным средством 1 и перекрестком, на котором следует повернуть направо или налево, и скоростью Vv движения транспортного средства 1, которая представляет собой относительную скорость между перекрестком и транспортным средством 1.
В связи с этим, когда перекресток, на котором транспортное средство 1 будет поворачивать направо или налево, уже определен, можно прогнозировать, превосходит ли эффект E1 снижения расхода топлива вследствие инерционного движения эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления, и выбирать соответствующее одно из инерционного движения и рекуперации энергии замедления.
[0074] Модифицированный пример
Блок 46 определения порогового значения может определять пороговое значение D расстояния Dt между транспортным средством 1 и перекрестком, на котором транспортное средство 1 будет поворачивать направо или налево, в соответствии со скоростью Vv движения. Когда расстояние Dt больше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления. Когда расстояние Dt равно или меньше порогового значения D, блок 43 прогнозирования эффекта снижения расхода топлива может прогнозировать, что эффект E1 снижения расхода топлива вследствие инерционного движения не превосходит эффект E2 снижения расхода топлива вследствие рекуперации энергии замедления.
[0075] Описание приведено со ссылкой на ограниченное количество вариантов выполнения. Однако объем прав не ограничивается этим, и специалисту в области техники будут очевидны модификации соответствующих вариантов выполнения, которые основаны на вышеописанном раскрытии.
Список ссылочных позиций
[0076]
1 - транспортное средство,
2 - двигатель,
2a - датчик скорости вращения,
3 - преобразователь крутящего момента,
4 - бесступенчатая трансмиссия,
5 - шестерня дифференциала,
6a-6b - ведущее колесо,
7 - мотор,
8 - генератор переменного тока,
9 - аккумулятор,
10 - блокировочная муфта,
11 - механизм переключения переднего/заднего хода,
12 - первичный шкив,
13 - вторичный шкив,
14 - ремень,
15 - масляный насос,
16 - муфта переднего хода,
17 - тормоз заднего хода,
18 - электрический масляный насос,
19 - датчик скорости вращения,
20 - блок управления двигателем,
21 - педаль тормоза,
22 - тормозной переключатель,
23 - педаль акселератора,
24 - датчик степени открытия педали акселератора,
25 - главный цилиндр,
26 - датчик давления главного цилиндра,
27 - главный усилитель,
29a-29b - датчик скорости колеса,
30 - блок управления трансмиссией,
40 - устройство управления движением транспортного средства,
41 - блок управления остановкой холостого хода,
42 - блок управления инерционным движением,
43 - блок прогнозирования эффекта снижения расхода топлива,
44 - контроллер двигателя,
45 - блок управления величиной выработки электрической мощности,
46 - блок определения порогового значения,
50 - блок измерения расстояния,
51 - блок измерения относительной скорости,
52 - блок обнаружения светофора,
53 - блок обнаружения перекрестка


Для снижения расхода топлива прогнозируют, какой из первого эффекта (E1) снижения расхода топлива вследствие инерционного движения и второго эффекта (E2) снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой; выполняют инерционное движение, когда спрогнозировано, что первый эффект (E1) снижения расхода топлива вследствие инерционного движения превосходит второй эффект (E2) снижения расхода топлива вследствие рекуперации энергии замедления; и выполняют рекуперацию энергии замедления, когда спрогнозировано, что первый эффект (E1) снижения расхода топлива вследствие инерционного движения не превосходит второй эффект (E2) снижения расхода топлива вследствие рекуперации энергии замедления. Повышается эффективность использования топлива. 4 н. и 6 з.п. ф-лы, 16 ил.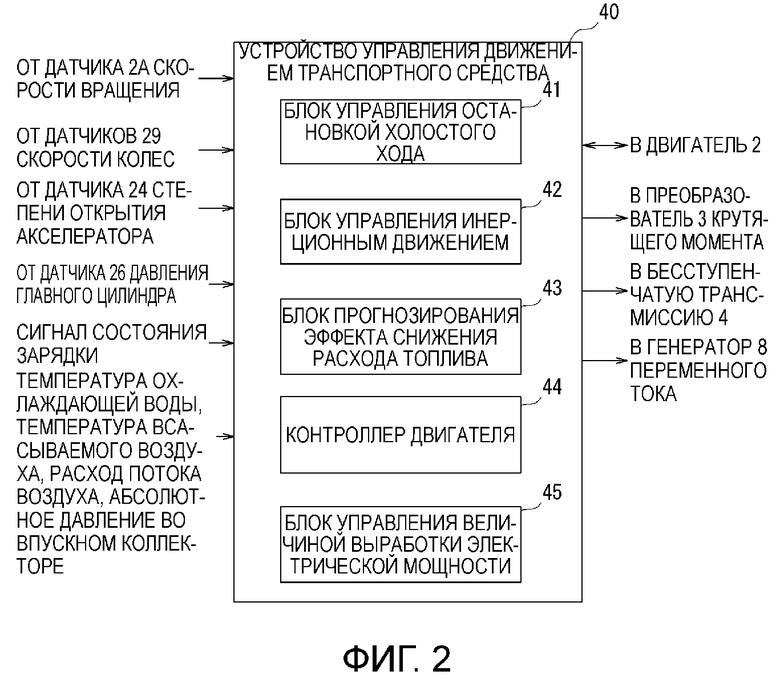
1. Способ управления движением транспортного средства, содержащий этапы, на которых:
определяют намерение водителя для ускорения во время движения транспортного средства;
прогнозируют при определении, что водитель не имеет намерения для ускорения, какой из первого эффекта снижения расхода топлива вследствие инерционного движения и второго эффекта снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой, причем инерционное движение вызывает движение транспортного средства при отключенной передаче мощности между двигателем и ведущим колесом транспортного средства, и рекуперация энергии замедления подает вращательную мощность ведущего колеса транспортного средства в электромотор;
выполняют инерционное движение, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления;
выполняют рекуперацию энергии замедления, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления;
определяют скорость транспортного средства при определении, что водитель не имеет намерения для ускорения; и
прогнозируют, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость равна или больше порогового значения скорости, и что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость меньше порогового значения скорости.
2. Способ управления движением транспортного средства по п. 1, в котором инерционное движение продолжается, когда скорость опускается ниже порогового значения во время выполнения инерционного движения.
3. Способ управления движением транспортного средства по п. 1 или 2, в котором рекуперация энергии замедления продолжается, когда скорость поднимается до или выше порогового значения во время выполнения рекуперации энергии замедления на нисходящем уклоне.
4. Способ управления движением транспортного средства, содержащий этапы, на которых:
определяют намерение водителя для ускорения во время движения транспортного средства;
прогнозируют при определении, что водитель не имеет намерения для ускорения, какой из первого эффекта снижения расхода топлива вследствие инерционного движения и второго эффекта снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой, причем инерционное движение вызывает движение транспортного средства при отключенной передаче мощности между двигателем и ведущим колесом транспортного средства, и рекуперация энергии замедления подает вращательную мощность ведущего колеса транспортного средства в электромотор;
выполняют инерционное движение, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления;
выполняют рекуперацию энергии замедления, когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления;
определяют расстояние и относительную скорость между транспортным средством и объектом, который может быть фактором остановки для инерционного движения, при определении, что водитель не имеет намерения для ускорения; и
прогнозируют в соответствии с расстоянием и относительной скоростью, превосходит ли первый эффект снижения расхода топлива вследствие инерционного движения второй эффект снижения расхода топлива вследствие рекуперации энергии замедления.
5. Способ управления движением транспортного средства по п. 4, содержащий этапы, на которых:
определяют в соответствии с одним параметром из расстояния и относительной скорости пороговое значение другого параметра из расстояния и относительной скорости; и
прогнозируют, превышает ли первый эффект снижения расхода топлива вследствие инерционного движения второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, в соответствии с результатом сравнения другого параметра с пороговым значением.
6. Способ управления движением транспортного средства по п. 4 или 5, в котором объект представляет собой следующий впереди автомобиль, движущийся перед транспортным средством.
7. Способ управления движением транспортного средства по п. 4 или 5, в котором объект представляет собой красный сигнал светофора на маршруте транспортного средства и относительная скорость представляет собой скорость движения транспортного средства.
8. Способ управления движением транспортного средства по п. 4 или 5, в котором объект представляет собой перекресток, на котором транспортное средство будет поворачивать направо или налево по запланированному маршруту транспортного средства, и относительная скорость представляет собой скорость движения транспортного средства.
9. Устройство управления движением транспортного средства, включающее в себя:
устройство определения степени нажатия акселератора, выполненное с возможностью определения степени нажатия акселератора водителем; и
устройство управления, выполненное с возможностью управления электромотором и муфтой сцепления для передачи мощности между двигателем и ведущим колесом и между электромотором и ведущим колесом,
в котором, когда степень нажатия акселератора больше не определяется, устройство управления прогнозирует, какой из первого эффекта снижения расхода топлива вследствие инерционного движения и второго эффекта снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой, причем инерционное движение вызывает движение транспортного средства при отключенной передаче мощности между двигателем и ведущим колесом, и рекуперация энергии замедления подает вращательную мощность ведущего колеса в электромотор,
когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, устройство управления отключает двигатель от ведущего колеса посредством муфты сцепления,
когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, устройство управления подключает мотор к ведущему колесу посредством муфты сцепления,
причем устройство управления определяет скорость транспортного средства при определении, что водитель не имеет намерения для ускорения; и
устройство управления прогнозирует, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость равна или больше порогового значения скорости, и что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, когда скорость меньше порогового значения скорости.
10. Устройство управления движением транспортного средства, включающее в себя:
устройство определения степени нажатия акселератора, выполненное с возможностью определения степени нажатия акселератора водителем; и
устройство управления, выполненное с возможностью управления электромотором и муфтой сцепления для передачи мощности между двигателем и ведущим колесом и между электромотором и ведущим колесом,
в котором, когда степень нажатия акселератора больше не определяется, устройство управления прогнозирует, какой из первого эффекта снижения расхода топлива вследствие инерционного движения и второго эффекта снижения расхода топлива вследствие рекуперации энергии замедления превосходит другой, причем инерционное движение вызывает движение транспортного средства при отключенной передаче мощности между двигателем и ведущим колесом, и рекуперация энергии замедления подает вращательную мощность ведущего колеса в электромотор,
когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, устройство управления отключает двигатель от ведущего колеса посредством муфты сцепления,
когда спрогнозировано, что первый эффект снижения расхода топлива вследствие инерционного движения не превосходит второй эффект снижения расхода топлива вследствие рекуперации энергии замедления, устройство управления подключает мотор к ведущему колесу посредством муфты сцепления,
причем устройство управления определяет расстояние и относительную скорость между транспортным средством и объектом, который может быть фактором остановки для инерционного движения, при определении, что водитель не имеет намерения для ускорения; и
устройство управления прогнозирует в соответствии с расстоянием и относительной скоростью, превосходит ли первый эффект снижения расхода топлива вследствие инерционного движения второй эффект снижения расхода топлива вследствие рекуперации энергии замедления.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| DE 102013219345 A1, 26.03.2015 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| WO 2014158826 A1, 02.10.2014 | |||
| US 2013166182 A1, 27.06.2013 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| JP 2012131292 A, 12.07.2012. | |||

