Изобретение относится к магнитным измерениям и предназначено для измерения ВН-характеристик постоянных магнитов.
Известен способ регистрации гистерезисной петли (патент RU № 2376610, опубл. 20.12.2009, МПК G01R 33/14), заключающийся в подаче периодического сигнала возбуждения сложной формы, содержащего высокочастотную и низкочастотную составляющие, на намагничивающую обмотку, регистрацию сигнала напряженности магнитного поля, пропорционального току намагничивающей обмотки, регистрацию сигнала индукции, пропорционального интегралу электродвижущей силы (ЭДС) измерительной обмотки. Особенность способа в том, что сигнал возбуждения сложной формы формируют так, что внутри цикла полного перемагничивания он меняет знак только один раз, уточняют регистрируемый сигнал напряженности магнитного поля вычитанием из него сигнала ЭДС с коэффициентом пропорциональности, величину которого подстраивают наблюдением за регистрируемой петлей гистерезиса так, чтобы петля имела монотонную форму без чередования участков выпуклости и вогнутости.
К недостаткам относится то, что способ требует присутствия наблюдателя-корректировщика, либо автомата, сглаживающего участки, измеренные с большими отклонениями от гистерезисной формы. Вместе с необходимостью интегрировать измеренный сигнал, это дает значительные погрешности.
Известен способ определения кривой намагничивания ферромагнитного материала (патент RU № 2293344, опубл. 14.11.2005, МПК G01R 33/14), заключающийся в том, что образец материала в виде цилиндрического стержня с известной относительной длиной намагничивают в однородном стороннем магнитном поле напряженностью Не, по направлению совпадающем с осью тела, измеряют суммарную магнитную индукцию В в центральном сечении тела и строят зависимость В(Нe), определяют напряженность «внутреннего поля» по формуле Hi, и затем определяют искомую кривую намагничивания материала В(Hi). При этом намагничивание ведут до магнитного насыщения материала, по измеренной зависимости В(Нe) определяют индукцию поля магнетика, соответствующую насыщению материала Вмs и намагниченность насыщения Ms, при заданных значениях В определяют относительную магнитную индукцию b, а в качестве коэффициента размагничивания выбирают центральный коэффициент размагничивания Nц цилиндрического стержня, который определяют с использованием семейства градировочных зависимостей коэффициентов Nц, или их приведенных значений n = Nц/N0, от b при заданных значениях λ.
К недостаткам относится то, что в основе способа лежит операция интегрирования сигнала с индукционных датчиков, что ухудшает точностные параметры.
Наиболее близкой по технической сущности к заявляемому изобретению является выбранная в качестве прототипа технология контроля параметров постоянного магнита, описанная в патенте RU 185424 U1 «Технологический коэрцитиметр магнитных гистерезисных параметров», опубл. 04.12.2018, МПК G01R 33/14, которую реализуют в разомкнутой цепи при воздействии на постоянный магнит импульсного двухполярного магнитного поля, создаваемого путем разряда емкостного накопителя энергии на индуктор, оснащенный системой индукционных датчиков.
Система датчиков индукционного типа выделяет сигналы, пропорциональные: намагниченности постоянного магнита M(t), индукции B(t) и напряженности магнитного поля H(t).
В результате воздействия двухполярного импульсного магнитного поля в рабочей зоне индуктора происходит перемагничивание постоянного магнита. Амплитуда и форма электрических сигналов, индуцированных в датчиках, зависят от величины напряженности поля и свойств контролируемого магнита.
Результаты опыта обрабатываются с использованием программного обеспечения на основе решения системы параметрических уравнений, имеющей вид:
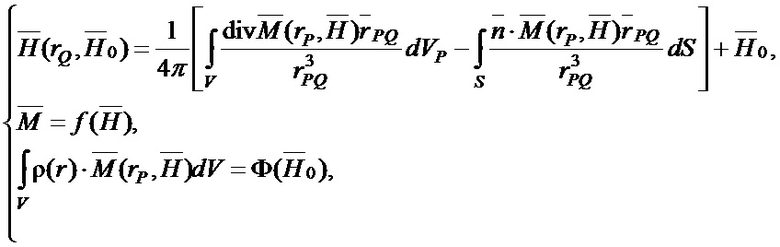
где  – напряженность магнитного поля в точке Q;
– напряженность магнитного поля в точке Q;  – намагниченность магнита в точке P;
– намагниченность магнита в точке P;  – нормаль к поверхности S в точке интегрирования;
– нормаль к поверхности S в точке интегрирования;  – радиус-вектор, соединяющий точки P и Q;
– радиус-вектор, соединяющий точки P и Q;  – напряженность внешнего магнитного поля;
– напряженность внешнего магнитного поля;  – функция, описывающая кривую размагничивания; ρ – весовая функция измерительной катушки;
– функция, описывающая кривую размагничивания; ρ – весовая функция измерительной катушки;  – экспериментально полученная зависимость потока поля магнита в измерительной катушке от напряжённости внешнего поля.
– экспериментально полученная зависимость потока поля магнита в измерительной катушке от напряжённости внешнего поля.
По результатам опыта выполняется построение кривых перемагничивания постоянного магнита.
К недостаткам прототипа относится то, что в основе способа измерения лежит операция интегрирования, что дает значительные погрешности измерения.
Задача изобретения - повышение точности измерения BH-характеристик постоянных магнитов за счёт измерения изменяющихся во времени напряжения, приложенного к индуктору, и тока, протекающего в нем, а также использования программного обеспечения, рассчитывающего математическую модель намагничивающей системы и магнита в виде системы параметрических уравнений, позволяющего применять датчики напряжения и тока.
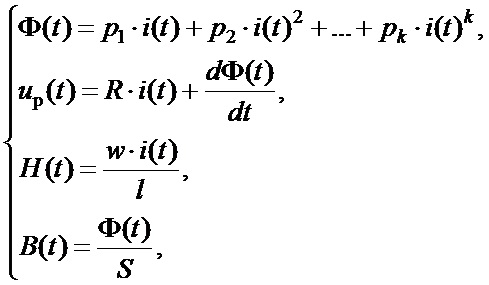
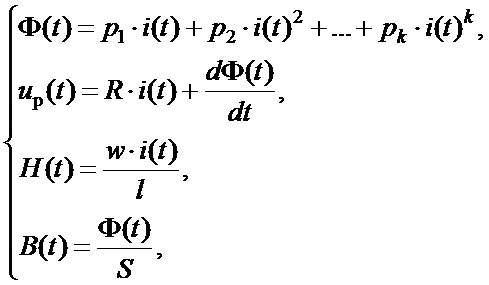
Указанная задача решается за счёт того, что способ измерения ВН-характеристик постоянных магнитов, заключающийся в определении магнитной индукции и напряжённости магнитного поля в разомкнутой цепи при воздействии на постоянный магнит импульсного двухполярного магнитного поля, создаваемого путем разряда емкостного накопителя энергии на индуктор, оснащенный системой датчиков, сигналы с выхода которой оцифровывают и обрабатывают программным обеспечением с возможностью решения системы параметрических уравнений, по результатам работы которого выполняют построение кривых перемагничивания постоянного магнита, причем системой датчиков измеряют изменяющиеся во времени напряжение, приложенное к индуктору, и ток, протекающий в нем, значения которых оцифровывают и обрабатывают программным обеспечением с возможностью решения системы параметрических уравнений вида:
 (1)
(1)
где uр(t) – зависимость от времени напряжения, приложенного к индуктору, полученное в результате решения системы параметрических уравнений;
i(t) – зависимость от времени тока, протекающего в индукторе;
R – активное сопротивление индуктора;
Ф(t) – зависимость магнитного потока, пронизывающего постоянный магнит, от тока в индукторе;
p 1, p2, …, pk – параметры, определяющие форму зависимости Ф(t);
k – количество учитываемых параметров;
H(t) – зависимость от времени напряженности магнитного поля, создаваемое индуктором;
w – количество витков в индукторе;
l – длина индуктора;
B(t) – зависимость индукции магнитного поля в постоянном магните от времени;
S – площадь сечения постоянного магнита;
вместе с тем, программное обеспечение производит аппроксимацию методом разложения в ряд Фурье-Бесселя зависимостей от времени напряжений: измеренного u(t) и uр(t), рассчитанного системой параметрических уравнений, и определяет уровень различия между зависимостями uр(t) и u(t) по неравенству
 (2)
(2)
где n – количество учитываемых членов при разложении в ряд Фурье-Бесселя;
x – количество моментов времени, в которые происходит расчёт координат точек;
J 0(t) – функция Бесселя нулевого порядка;
 – положительные нули функции Бесселя нулевого порядка, пронумерованные в порядке их возрастания от 1 до n;
– положительные нули функции Бесселя нулевого порядка, пронумерованные в порядке их возрастания от 1 до n;
δ – относительная погрешность измерения напряжения на индукторе, в процентах;
y – номер точки;
am и aрт – коэффициенты ряда Фурье-Бесселя, полученные в ходе разложения u(t) и uр(t) с помощью выражения
 (3)
(3)
где Δt – шаг дискретизации;
если неравенство не выполняется, то изменяются параметры p1, p2, … pk, определяющие форму зависимости Ф(t), вычисляемые при помощи итерационного алгоритма, например Нелдера-Мида, после чего вновь определяется полученное в результате решения системы параметрических уравнений (1) напряжение uр(t), если же неравенство выполняется, то BH характеристика постоянного магнита, полученная в результате решения системы параметрических уравнений (1), считается измеренной в виде выражения:
B = f (H).
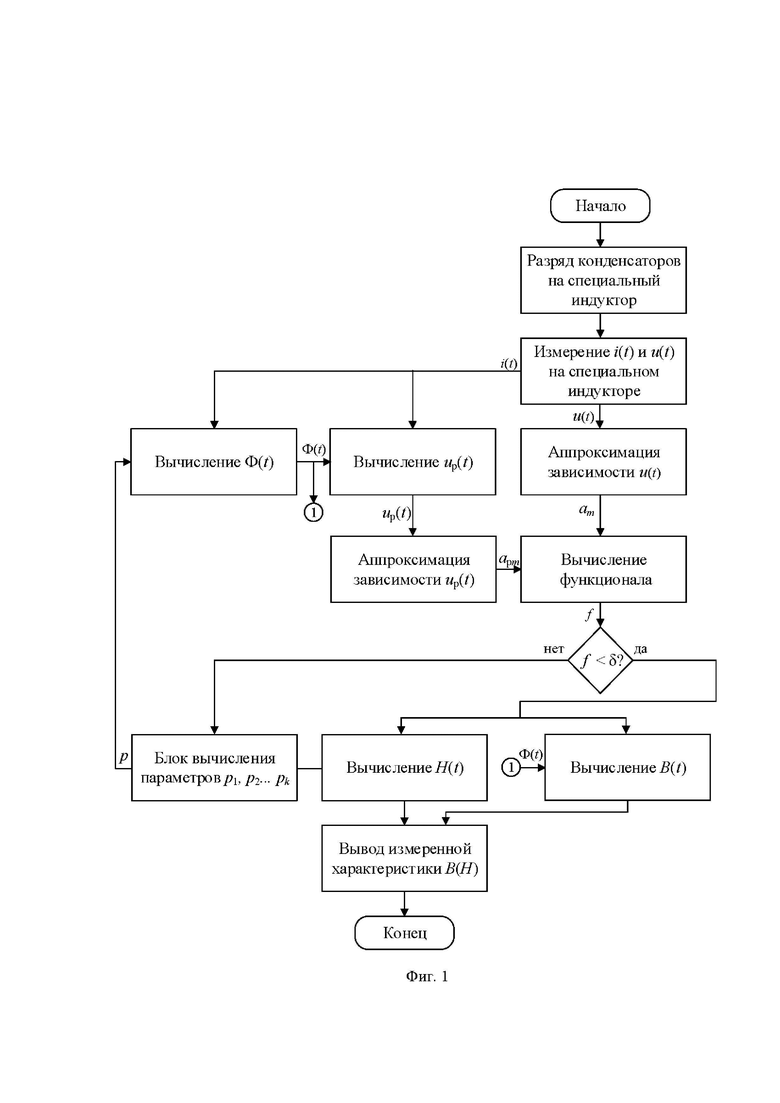
На Фиг. 1 представлена блок-схема предлагаемого способа.
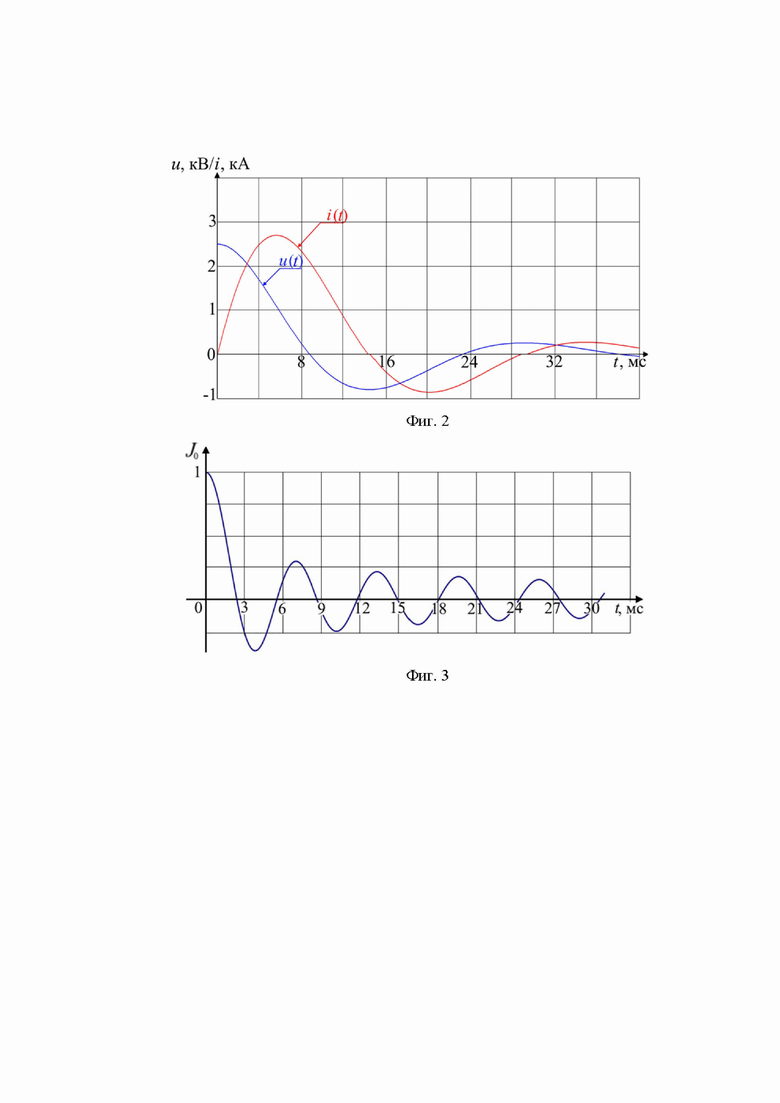
На Фиг. 2 показана форма измеряемых зависимостей напряжения u и тока i на индукторе от времени t.
На Фиг. 3 представлена функция Бесселя нулевого порядка.
В ходе разряда емкостного накопителя на индуктор, внутри которого расположен постоянный магнит, подаётся двухполярный импульс тока.
Измеряют зависимости напряжения u и тока i на индукторе от времени t.
Измеренная зависимость i(t) поступает на вход математической модели, представляющей собой систему параметрических уравнений (1), на выходе которой определяется зависимость uр(t).
Производится аппроксимация зависимостей u(t) и uр(t) методом разложения в ряд Фурье-Бесселя. Функция Бесселя Jν(x) применяется для разложения в ряд Фурье-Бесселя с возможностью находить коэффициенты и имеет вид:
где ν – порядок функции; k – количество учитываемых слагаемых.
Разложение в ряд Фурье-Бесселя функций u(t) и uр(t) имеет вид:
Затем рассчитывается уровень различий между измеренной характеристикой u(t) и рассчитанной характеристикой uр(t), полученной в результате решения системы параметрических уравнений (1). Для этого высчитывается функционал (2), который численно характеризует различие между двумя характеристиками.
Если неравенство не выполняется, то блоком вычисления изменяются параметры p1, p2, … pk, определяющие форму зависимости Ф(t), вычисляемые при помощи итерационного алгоритма, например Нелдера-Мида, после чего вновь определяется полученное в результате решения системы параметрических уравнений напряжение uр(t), если же неравенство выполняется, то магнитную характеристику постоянного магнита, полученную в результате решения системы параметрических уравнений (1), считают измеренной в виде выражения:
B = f (H),
и выводят в виде графика.
Таким образом, использование датчиков, измеряющих напряжение, приложенное к индуктору, и ток, протекающий в нем, а также применение программного обеспечения, включающего в себя математическую модель намагничивающей системы и магнита в виде системы параметрических уравнений, позволяет избежать накопления ошибки, что улучшает точность измерения ВН-характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ технического контроля магнитопроводов | 1989 |
|
SU1684763A1 |
| ПАЗОННЫЙ СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137286C1 |
| ДАТЧИК ИНДУЦИРОВАННЫХ МАГНИТНЫХ ПОЛЕЙ (ВАРИАНТЫ) | 1993 |
|
RU2075757C1 |
| КОМПОЗИЦИОННЫЙ МАГНИТНЫЙ МАТЕРИАЛ НА ОСНОВЕ ИНТЕРМЕТАЛЛИЧЕСКОГО СОЕДИНЕНИЯ САМАРИЯ С КОБАЛЬТОМ SmCo | 1986 |
|
SU1391365A1 |
| СПОСОБ КОНТРОЛЯ ПОД РАБОЧИМИ ТОКАМИ И НАПРЯЖЕНИЯМИ ДЕФОРМАЦИИ ОБМОТОК ПОНИЖАЮЩЕГО ТРЕХФАЗНОГО ДВУХОБМОТОЧНОГО ТРЕХСТЕРЖНЕВОГО СИЛОВОГО ТРАНСФОРМАТОРА | 2011 |
|
RU2478977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ПРОНИЦАЕМОСТИ ЦИЛИНДРИЧЕСКИХ ФЕРРОМАГНИТНЫХ ПРОВОДНИКОВ | 2010 |
|
RU2423717C1 |
| АЗИМУТАЛЬНАЯ ЯМР-ВИЗУАЛИЗАЦИЯ СВОЙСТВ ГОРНОЙ ПОРОДЫ ИЗ СТВОЛА СКВАЖИНЫ | 2003 |
|
RU2318224C2 |
| Спечённый магнит и способы его получения | 2013 |
|
RU2629124C9 |
| Регистратор ускорения | 1987 |
|
SU1509746A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОСТОЯННЫХ МАГНИТОВ ИЗ СПЛАВОВ НА ОСНОВЕ РЕДКОЗЕМЕЛЬНЫХ ЭЛЕМЕНТОВ, ЖЕЛЕЗА И КОБАЛЬТА С УЛУЧШЕННЫМИ МАГНИТНЫМИ ХАРАКТЕРИСТИКАМИ | 2016 |
|
RU2631055C2 |
Изобретение относится к магнитным измерениям и предназначено для измерения ВН-характеристик постоянных магнитов. Способ измерения ВН-характеристик постоянных магнитов содержит этапы, на которых измеряют параметры тока и напряжения в намагничивающем индукторе, рассчитывают математическую модель в виде системы параметрических уравнений, основанную на измеренных данных и параметрах устройства намагничивания, используют итерационный симплекс-метод для корректирования параметров математической модели для определения BH-характеристик постоянных высококоэрцитивных магнитов. Технический результат – повышение точности измерения BH-характеристик постоянных магнитов. 3 ил.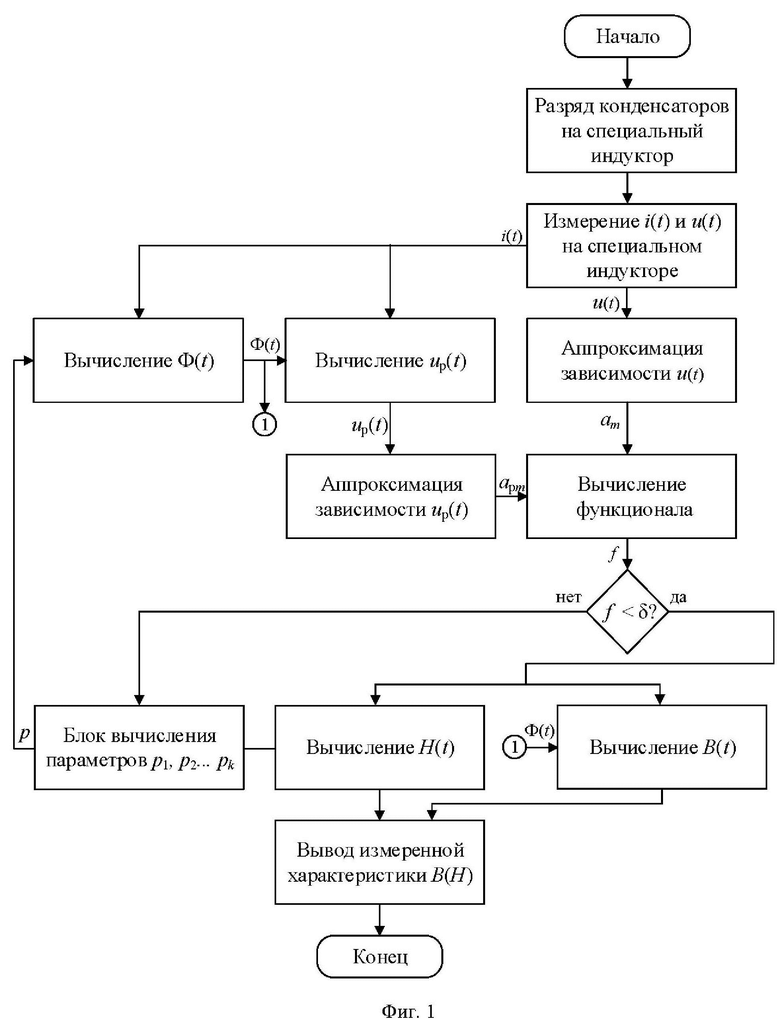
Способ измерения ВН-характеристик постоянных магнитов, заключающийся в определении магнитной индукции и напряжённости магнитного поля в разомкнутой цепи при воздействии на постоянный магнит импульсного двухполярного магнитного поля, создаваемого путем разряда емкостного накопителя энергии на индуктор, оснащенный системой датчиков, сигналы с выхода которой оцифровывают и обрабатывают программным обеспечением с возможностью решения системы параметрических уравнений, по результатам работы которого выполняют построение кривых перемагничивания постоянного магнита, отличающийся тем, что системой датчиков измеряют изменяющиеся во времени напряжение, приложенное к индуктору, и ток, протекающий в нем, значения которых оцифровывают и обрабатывают программным обеспечением с возможностью решения системы параметрических уравнений вида:
где uр(t) – зависимость от времени напряжения, приложенного к индуктору, полученное в результате решения системы параметрических уравнений;
i(t) – зависимость от времени тока, протекающего в индукторе;
R – активное сопротивление индуктора;
Ф(t) – зависимость магнитного потока, пронизывающего постоянный магнит, от тока в индукторе;
p 1, p2, …, pk – параметры, определяющие форму зависимости Ф(t);
k – количество учитываемых параметров;
H(t) – зависимость от времени напряженности магнитного поля, создаваемое индуктором;
w – количество витков в индукторе;
l – длина индуктора;
B(t) – зависимость индукции магнитного поля в постоянном магните от времени;
S – площадь сечения постоянного магнита;
вместе с тем, программное обеспечение производит аппроксимацию методом разложения в ряд Фурье-Бесселя зависимостей от времени напряжений: измеренного u(t) и uр(t), рассчитанного системой параметрических уравнений, и определяет уровень различия между зависимостями uр(t) и u(t) по неравенству
где n – количество учитываемых членов при разложении в ряд Фурье-Бесселя;
x – количество моментов времени, в которые происходит расчёт координат точек;
J 0(t) – функция Бесселя нулевого порядка;
 – положительные нули функции Бесселя нулевого порядка, пронумерованные в порядке их возрастания от 1 до n;
– положительные нули функции Бесселя нулевого порядка, пронумерованные в порядке их возрастания от 1 до n;
δ – относительная погрешность измерения напряжения на индукторе, в процентах;
y – номер точки;
am и aрт – коэффициенты ряда Фурье-Бесселя, полученные в ходе разложения u(t) и uр(t) с помощью выражения
где Δt – шаг дискретизации;
если неравенство не выполняется, то изменяются параметры p1, p2, … pk, определяющие форму зависимости Ф(t), вычисляемые при помощи итерационного алгоритма, например Нелдера-Мида, после чего вновь определяется полученное в результате решения системы параметрических уравнений (1) напряжение uр(t), если же неравенство выполняется, то BH характеристика постоянного магнита, полученная в результате решения системы параметрических уравнений (1), считается измеренной в виде выражения:
B = f (H).
| 0 |
|
SU185424A1 | |
| Способ технического контроля многополюсных постоянных магнитов по магнитным свойствам | 1974 |
|
SU1210105A1 |
| CN 114325516 A, 12.04.2022 | |||
| Устройство для измерения удельной магнитной энергии постоянных магнитов | 1976 |
|
SU587421A1 |

