ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к близостным переключателям (срабатывающим при приближении), выполненным с использованием емкостных детекторов, и может быть использована в любых электронных устройствах, где реализована возможность взаимодействия с конечным пользователем (например, в датчиках измерения физических величин - давления, расхода, температуры и т. п.).
УРОВЕНЬ ТЕХНИКИ
Для обеспечения взаимодействия конечного устройства с оператором довольно часто используют нажимные кнопки или клавиатуру. Данный способ обладает несомненным преимуществом – низкой сложностью разработки.
В последнее время все более популярным становится использование емкостных кнопок, основными преимуществами которых над нажимными кнопками являются:
- повышенная надежность (срок эксплуатации емкостной кнопки определяется фактически целостностью печатной платы и временем функционирования обработчика событий кнопки);
- высокая защищенность от внешних воздействий (емкостные кнопки намного проще защитить от попадания пыли, влаги, масла);
- вандалостойкость (отсутствие выступающих элементов);
- улучшение внешнего вида приборов.
С другой стороны, возникает ряд обязательных требований, которыми следует руководствоваться на этапе проектирования устройства с емкостным интерфейсом:
- необходимость учитывать определенные требования к печатным проводникам при разводке печатной платы (интерфейсные линии могут оказывать влияние на линии данных с емкостной кнопки);
- необходимость учитывать расположение емкостных кнопок внутри корпуса прибора (проводящий корпус прибора может создавать электромагнитные наводки на емкостные кнопки);
- необходимость реализации схемы обработки полученных с емкостной кнопки данных;
- необходимость в разработке программного алгоритма для принятия решений о факте срабатывания емкостной кнопки.
Известна конструкция сенсорного дисплейного устройства, описанная в патенте РФ на изобретение № 2363991 (МПК G09G 3/00, дата подачи заявки 27.11.2007, опубликовано 10.08.2009).
Описанный авторами тактильный датчик содержит в себе дисплейное устройство с подложкой, на которой расположен, по меньшей мере, один дисплейный электрод для отображения образа на дисплейном устройстве. Интерфейс устройства соединен с, по меньшей мере, одним дисплейным электродом для приема отображаемых данных в дисплейном устройстве. Кроме того, наличествует измерительная схема, соединенная с, по меньшей мере, одним дисплейным электродом. Обеспечено коммутирующее средство для подключения интерфейса к, по меньшей мере, одному дисплейному электроду, когда коммутирующее средство находится в первом рабочем состоянии, и подключения измерительной схемы к, по меньшей мере, одному дисплейному электроду, когда коммутирующее средство находится во втором рабочем состоянии.
Конструкция сенсорного дисплейного устройства, описанная в патенте РФ № 2363991, имеет существенный недостаток – присутствует избыточность конструкции: наличие в конструкции устройства коммутирующего средства для подключения интерфейса к коммутирующему электроду и наличие в конструкции устройства сигнал-генератора и схемы анализа сигналов (функции которых в условиях текущего развития микроэлектроники могут выполняться одним микропроцессором).
Известен способ и устройство управления сенсорным экраном, описанные в патенте РФ на изобретение № 2608463 (МПК G06F 3/044, G06F 3/14, дата подачи заявки 23.10.2014, опубликовано 18.01.2017).
Описанный авторами емкостный сенсорный экран (блок ввода информации) представляет собой матрицу поперечных и продольных электродов, образующих множество проверяемых (замеряемых) точек, равно-распределенных на поверхности экрана. Для увеличения общей помехоустойчивости системы (в частности, от электропроводящих жидкостей) авторами патента был применен следующий алгоритм обработки данных:
- получение фактических значений емкости для проверяемых точек на сенсорном экране (без применения к значениям емкости каких-либо весовых коэффициентов);
- в соответствии с изменением фактических значений емкости относительно опорных значений емкости, идентификацию уровня помех от электропроводящей жидкости, причем опорное значение емкости относится к значению емкости, когда проверяемая точка не находится под влиянием электропроводящей среды;
- управление сенсорным экраном под операционным режимом, соответствующим уровню помех.
Необязательно, в соответствии с изменением фактического значения емкости относительно опорного значения емкости, идентификация уровня помех от электропроводящей жидкости включает в себя:
- определение, удовлетворяет ли каждая из проверяемых точек предопределенному условию, причем предопределенное условие включает в себя:
-- фактическое значение собственной емкости для проверяемой точки является таким же, как опорное значение собственной емкости, и фактическое значение взаимной емкости для проверяемой точки является отличным от опорного значения взаимной емкости;
-- опорное значение собственной емкости относится к значению собственной емкости, когда проверяемая точка не находится под влиянием электропроводящей среды, и опорное значение взаимной емкости относится к значению взаимной емкости, когда проверяемая точка не находится под влиянием электропроводящей среды;
-- идентификацию, что поверхность проверяемой точки покрыта электропроводящей жидкостью, если проверяемая точка удовлетворяет предопределенному условию, и в соответствии со значением разности между фактическим значением взаимной емкости и опорным значением взаимной емкости, идентификацию величины покрытия электропроводящей жидкости, значение разности находится в положительном корреляционном отношении с величиной покрытия;
-- согласно тому, является ли поверхность каждой проверяемой точки покрытой электропроводящей жидкостью, и величине покрытия электропроводящей жидкости, идентификацию фактической области покрытия и величины покрытия электропроводящей жидкости на поверхности сенсорного экрана;
-- и, в соответствии с фактической областью покрытия и величиной покрытия электропроводящей жидкости на поверхности сенсорного экрана, идентификацию уровня помех от электропроводящей жидкости.
Способ и устройство управления сенсорным экраном, описанные в патенте РФ на изобретение № 2608463, имеет ряд существенных недостатков:
Сравнение фактически измеренного значения емкости производится с фиксированным опорным значением емкости для данного конкретного емкостного элемента. В свою очередь, фиксированное опорное значение емкости не дает той гибкости в принятии решений о факте срабатывания емкостного элемента (в сравнении с адаптивным опорным значением емкости, вычисленным как среднее от всех значений емкостных элементов). Как результат - отсутствие возможности всегда однозначно отделить возмущающие воздействия от реального нажатия (только обработкой «нестандартного» поведения кнопки возможно выделить некоторые ложные срабатывания);
Авторами не описан механизм (алгоритм) выбора конкретного порога срабатывания, являющегося оптимальным в определенных условиях эксплуатации.
Эксплуатационные возможности способа и устройства управления сенсорным экраном, описанных в патенте РФ № 2608463, ограничены.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предлагаемое техническое решение позволяет исключить проблемы известных технических решений на аппаратном и программном уровне одновременно. Причем, возможно использование тех же алгоритмов работы и методов измерения емкости, что применялись и применяются. Однако предлагаемый алгоритм обработки данных является предпочтительным.
Техническим результатом изобретения является повышенная помехозащищенность блока ввода информации от внешних возмущающих воздействий в сравнении со всеми известными техническими решениями, что позволяет использовать его в особо жестких условиях эксплуатации, в т. ч. в качестве изделия промышленного применения.
Предлагаемое техническое решение (конструктив) заключается в следующем:
1. Модуль ввода информации (емкостная кнопка) состоит из множества независимых емкостных элементов (то есть является многоэлементной);
2. Размер каждого емкостного элемента не превышает либо незначительно превышает пятно (площадь) контакта человеческого пальца;
3. При взаимодействии оператора с модулем ввода информации изменение электрических характеристик (изменение емкости, либо напряжения) должно одномоментно проявляться сразу на нескольких рядом расположенных емкостных элементах, входящих в состав модуля ввода информации, вследствие возникновения емкостной или гальванической связи между емкостными элементами модуля ввода информации и оператором, совершающим ввод информации;
4. Площадь, занимаемая всеми емкостными элементами (площадь модуля ввода информации), должна превышать максимальную площадь контакта (нажатия) человеческого пальца;
5. Геометрическая форма емкостных элементов, входящих в модуль ввода информации, может быть произвольной (квадрат, прямоугольник, круг, овал, ромб и т. д.). Определяется форма емкостных элементов, главным образом, особенностями дизайна. При этом должны выполняться условия 1, 2, 3 и 4 предлагаемого технического решения (в плане особенностей конструктива) выше;
6. Аналогично с условием 5 выше, геометрическая форма модуля ввода информации (емкостной кнопки) в целом может быть произвольной. Определяется форма емкостной кнопки, главным образом, особенностями дизайна. При этом должны выполняться условия 1, 2, 3 и 4 предлагаемого технического решения (в плане особенностей конструктива) выше;
7. Каждый из емкостных элементов, входящих в состав модуля ввода информации, имеет свой весовой коэффициент линейный или в виде функции, уравнивающий показания каждого из емкостных элементов при одинаковом внешнем воздействии. Данные коэффициенты необходимы для компенсации влияния разводки печатной платы и особенностей конструктива изделия;
8. Количество независимых емкостных элементов может быть выбрано любым и определяется, главным образом, особенностями дизайна, требуемой точностью срабатывания (помехозащищенностью) емкостной кнопки, а также вычислительными способностями вычислительного модуля либо любых других модулей, осуществляющих непосредственное измерение емкости емкостных элементов;
9. Непосредственно на печатной плате с одним или несколькими модулями ввода информации (либо за ее пределами) должен присутствовать по меньшей мере один вычислительный модуль, осуществляющий сам, либо с помощью дополнительных модулей:
• Хранение программного обеспечения, необходимого для своей корректной работы либо для корректной работы всего прибора в целом;
• Хранение системы весовых коэффициентов линейных или в виде функции для всех емкостных элементов модуля ввода информации (емкостной кнопки);
• Измерение фактических значений емкости всех емкостных элементов модуля ввода информации одномоментно либо с минимально возможной задержкой последовательно, а затем применение к измеренным значениям емкости емкостных элементов соответствующих им весовых коэффициентов (нормировка);
• Вычисление среднего значения (арифметического, квадратичного и т. д.) от всех измеренных и вычисленных с помощью применения весовых коэффициентов вычислительным модулем фактических значений емкости емкостных элементов (другими словами, вычисление плато);
• Вычисление результирующих значений емкости всех емкостных элементов;
• Принятие решения о факте наличия или отсутствия нажатия на модуль ввода информации (емкостную кнопку) в целом;
• Необязательно, после принятия решения, индикацию факта (не)срабатывания емкостной кнопки (определения наличия или отсутствия нажатия на модуль ввода информации) посредством световых, звуковых или любых иных способов, к которым восприимчив человеческий организм;
• Необязательно, после принятия решения, передачу информации о состоянии модуля ввода информации (емкостной кнопки) в другие управляющие или регистрирующие системы прибора посредством интерфейсных сигнальных линий (интерфейсного модуля), где данная информация будет использоваться по непосредственному назначению (например, для отображения информации на дисплее прибора);
10. Все емкостные элементы должны иметь электрическую связь (посредством печатных проводников на поверхности или во внутренних слоях печатной платы, либо любым другим способом) непосредственно с вычислительным модулем, либо с дополнительным модулем, осуществляющим измерение фактических значений емкости емкостных элементов, в свою очередь имеющий электрическую связь с вычислительным модулем;
11. В случае наличия на печатной плате помимо вычислительного модуля дополнительных вспомогательных модулей, должна быть обеспечена электрическая связь последних с вычислительным модулем посредством печатных проводников на поверхности, либо во внутренних слоях печатной платы, либо любым другим способом;
12. Для функционирования вычислительного модуля, а также других дополнительных модулей в случае их наличия или необходимости для них внешнего питания должно быть предусмотрено подведение внешнего питающего напряжения посредством печатных проводников на поверхности, либо во внутренних слоях печатной платы, либо любым другим способом;
13. Для функционирования модуля ввода информации (емкостной кнопки) на все емкостные элементы должен быть подан необходимый потенциал напряжения с помощью самого вычислительного модуля (либо других модулей, осуществляющих непосредственное измерение емкости на емкостных элементах емкостной кнопки) посредством печатных проводников на поверхности или во внутренних слоях печатной платы, либо любым другим способом;
14. Необязательно, для защиты вычислительного модуля (либо дополнительных модулей, осуществляющих непосредственное измерение емкости на емкостных элементах емкостной кнопки) от электростатического разряда с человека в момент его коммуникации с емкостной кнопкой, допускается в разрыв электрических связей между вычислительным модулем и емкостными элементами (в случае измерения емкости непосредственно вычислительным модулем), либо между дополнительными вспомогательными модулями и емкостными элементами (в случае измерения емкости емкостных элементов с помощью дополнительных модулей) устанавливать защитные элементы (резисторы и т. д.);
15. Необязательно, непосредственно на печатной плате с модулями ввода информации (либо одного модуля ввода информации), или за ее пределами (например, на другой печатной плате в корпусе того же прибора, имеющего емкостные кнопки), допускается наличие специальной оснастки для программирования вычислительного модуля (либо дополнительных модулей, работающих вместе с вычислительным модулем). Специальная оснастка может быть выполнена в виде разъема для программирования, тестовых электрических точек для программирования посредством ложа щупов, либо любым другим способом (современные вычислительные модули допускают свое программирование посредством беспроводных протоколов связи).
Предлагаемое техническое решение (способ распознавания прикосновения к блоку ввода информации) заключается в:
1. Отказе от использования «сырых» фактических данных о значениях емкости емкостных элементов в пользу их нормировки посредством системы весовых коэффициентов (линейных или в виде функции). Данный подход позволяет в существенной мере компенсировать особенности каждого конкретного дизайна, снизить влияние наводок с проводящего корпуса прибора на отдельные, близко расположенные к нему, емкостные элементы. Следует отметить, что весовые коэффициенты могут подбираться как индивидуально для каждого прибора, так и быть идентичными сразу на целое семейство различных изделий (при схожести дизайна);
2. Использовании в качестве опорных значений емкости всех емкостных элементов не конкретных фиксированных значений, а адаптивного порога (плато), вычисляемого как среднее значение (арифметическое, квадратичное и т.д.) от всех одномоментно (либо с минимально возможной задержкой, но последовательно) измеренных и вычисленных (нормировка посредством весовых коэффициентов) вычислительным модулем фактических значений емкости емкостных элементов. При таком подходе большинство возмущающих воздействий (электромагнитные помехи либо заливка емкостной кнопки электропроводящими жидкостями) будет воздействовать одномоментно на все емкостные элементы емкостной кнопки, т. е. влиять на плато, но не на работу емкостного элемента относительно плато. Иные, мелкие воздействия, будь то брызги влаги или загрязнения, будут вызывать появление формы измеренной емкости (образуемой значениями измеренных емкостей каждого емкостного элемента) емкостных элементов, нехарактерных для нажатия пальцами или специальными стилусами;
3. Вычислении результирующих значений емкости всех емкостных элементов как разности между измеренными и вычисленными (нормировка посредством весовых коэффициентов) фактическими значениями емкости емкостных элементов с одной стороны (А), и адаптивного порога (плато) (В) с другой стороны, т.е. (А – В);
Для исключения отрицательных значений результирующей емкости отдельных емкостных элементов, в случае когда ((А – В) < 0), результирующее значение емкости данного емкостного элемента приравнивается к нулю;
В случае, когда ((А – В) > 0), полученное ранее результирующее значение емкости остается без изменений;
4. Использовании распределения результирующих значений емкости емкостных элементов для принятия решения о факте (не)срабатывания емкостной кнопки (наличия или отсутствия нажатия на модуль ввода информации 21) в целом.
5. При вычислении адаптивного порога может использоваться любой возможной способ получения средней величины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для описания предлагаемого технического решения используются следующие чертежи и диаграммы:
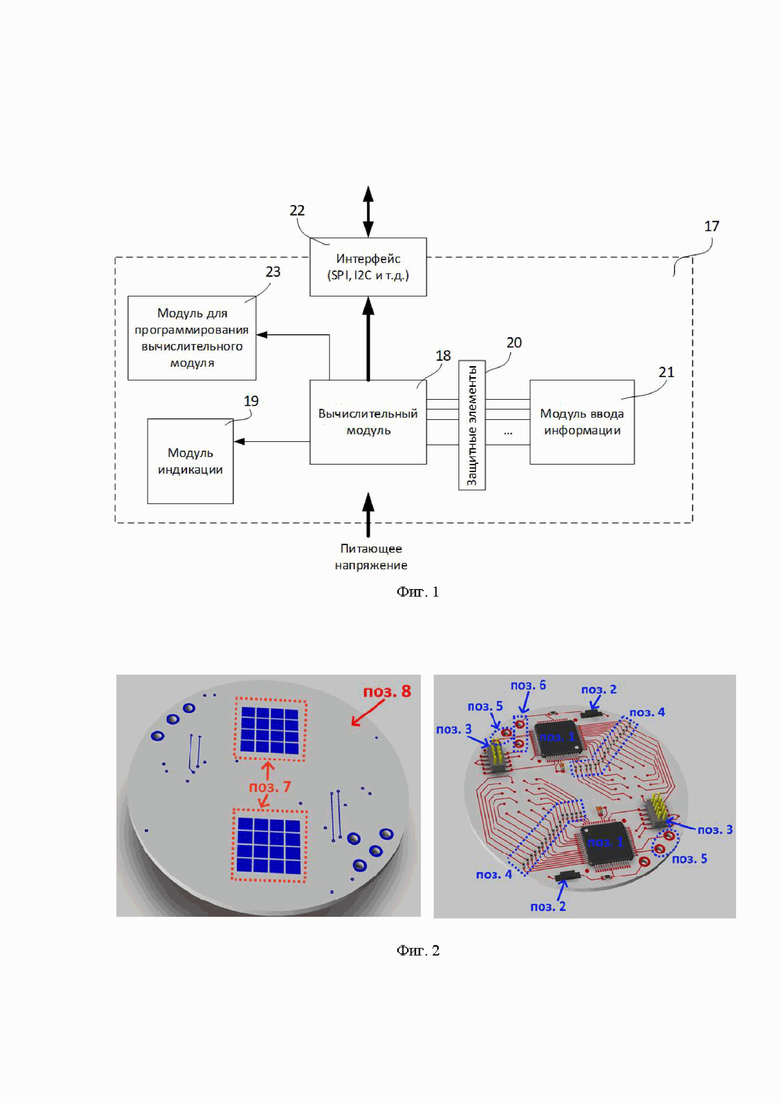
Фиг. 1 – принципиальная схема тактильного датчика в соответствии с предпочтительным вариантом реализации настоящего изобретения;
Фиг. 2 – изображение опытного прототипа, который использовался для апробации идеи;
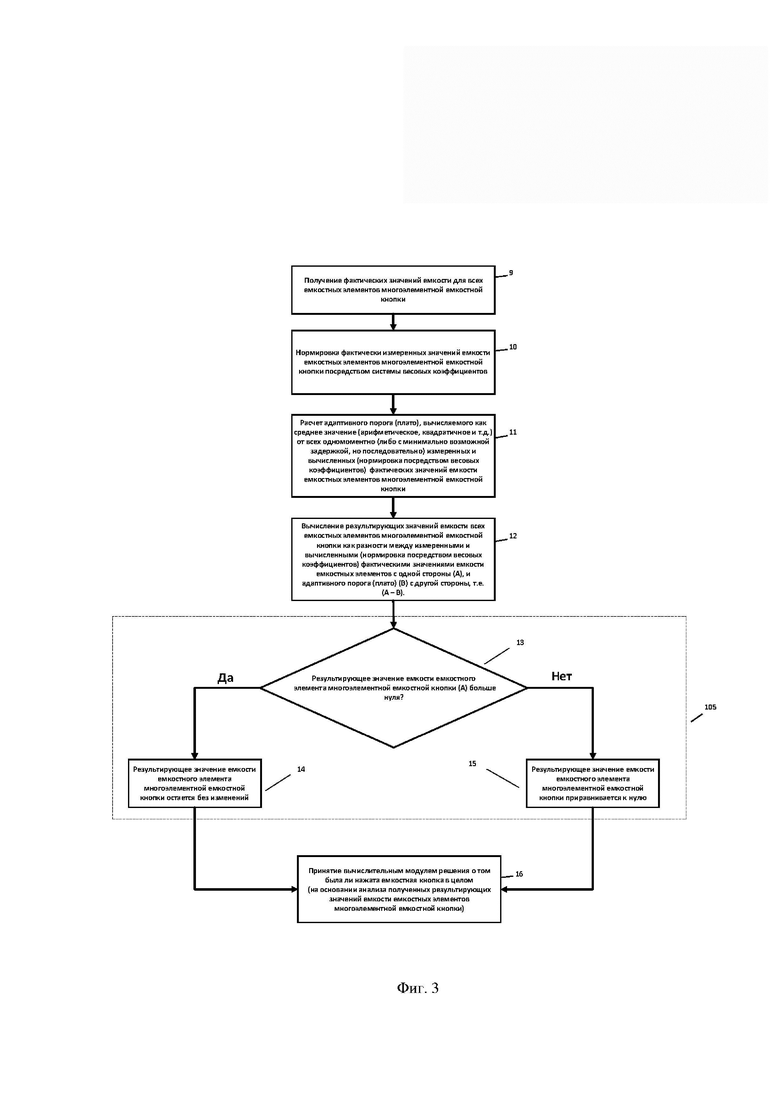
Фиг. 3 – блок-схема, отображающая способ обработки измеренных фактических значений емкости емкостных элементов многоэлементной емкостной кнопки согласно предлагаемому способу осуществления изобретения;
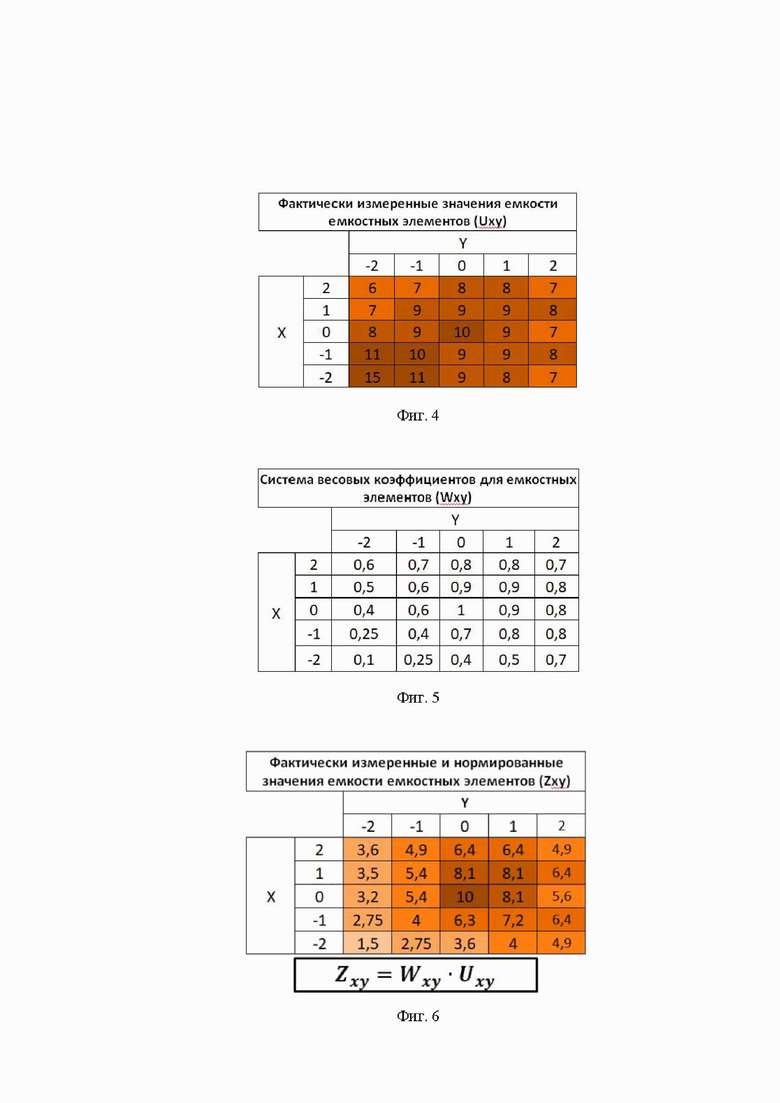
Фиг. 4 – пример осуществления: измеренные фактические значения емкости емкостных элементов многоэлементной емкостной кнопки, выраженные в относительных величинах;
Фиг. 5 – пример осуществления: система весовых коэффициентов для емкостных элементов многоэлементной емкостной кнопки;
Фиг. 6 – пример осуществления: нормировка посредством весовых коэффициентов фактически измеренных значений емкости емкостных элементов многоэлементной емкостной кнопки;
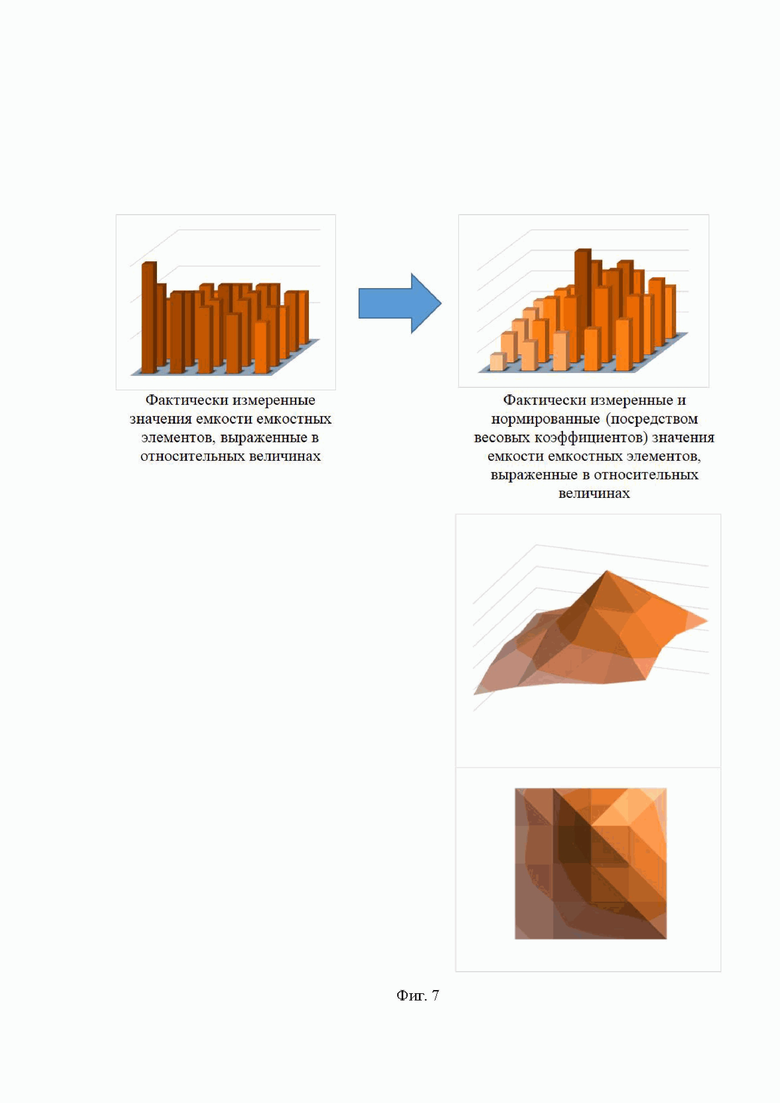
Фиг. 7 – пример осуществления: гистограммы, демонстрирующие преобразование данных от фиг. 4 к фиг. 6;
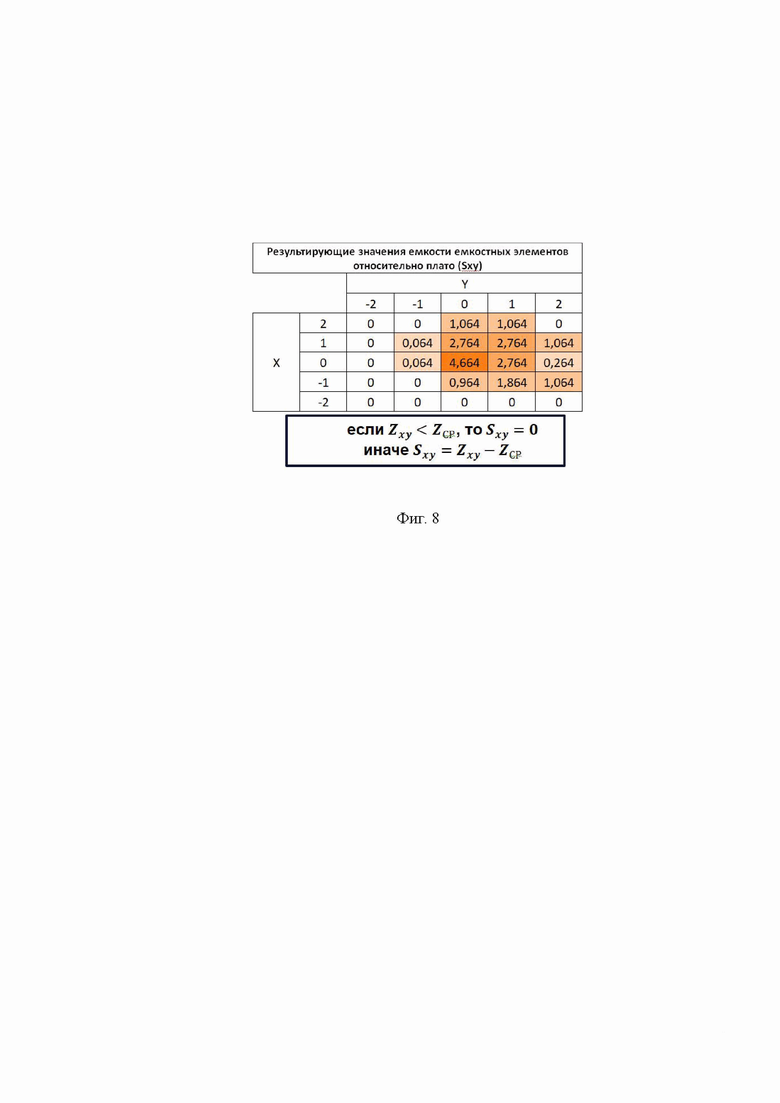
Фиг. 8 – пример осуществления: вычисление результирующих значений емкости емкостных элементов относительно адаптивного плато;
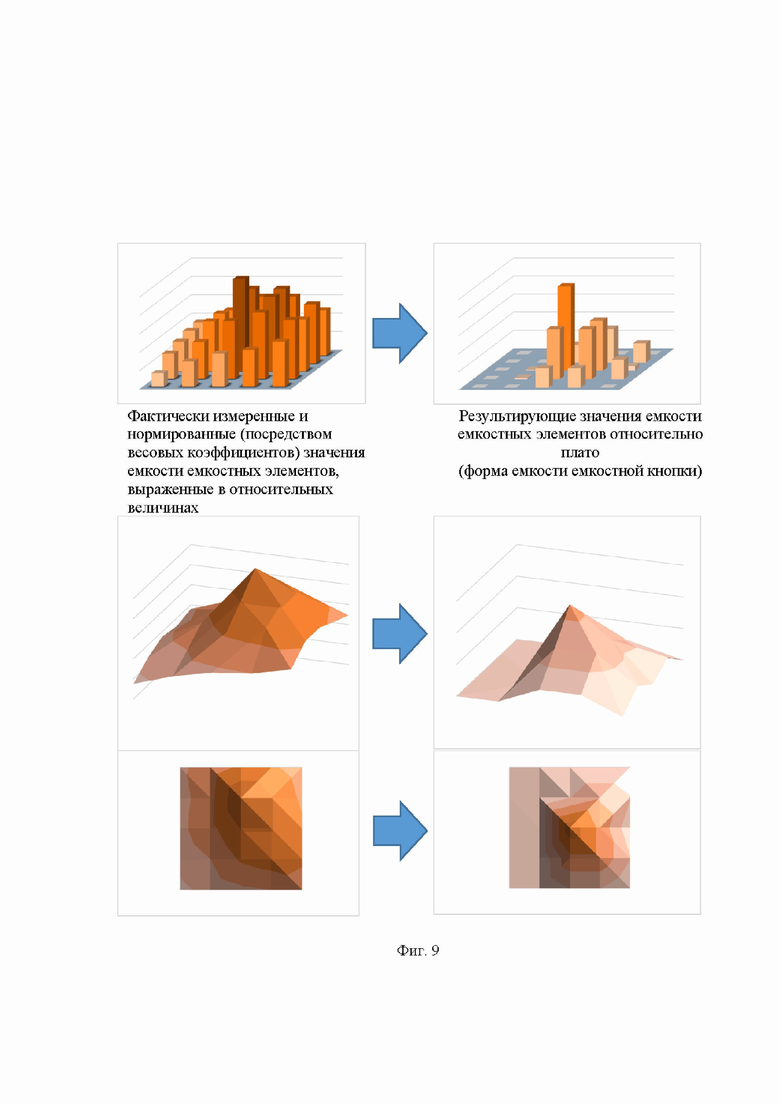
Фиг. 9 – пример осуществления: гистограммы, демонстрирующие преобразование данных от фиг. 6 к фиг. 8.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Принципиальная схема блока ввода информации (поз. 17) в соответствии с предпочтительным вариантом реализации изображена на фиг. 1. Предлагаемая конструкция блока ввода информации состоит из вычислительного модуля (поз. 18), соединенного посредством печатных проводников (либо любым другим способом) с модулем ввода информации (непосредственно многоэлементной емкостной кнопкой) (поз. 21). Для поддержания работоспособности вычислительного модуля (а также других дополнительных модулей в случае их наличия, либо необходимости для них внешнего питания) должно быть предусмотрено подведение внешнего питающего напряжения (посредством печатных проводников на поверхности или во внутренних слоях печатной платы, либо любым другим способом).
Необязательно, в разрыв электрических связей между вычислительным модулем (поз. 18) и модулем ввода информации (поз. 21) могут быть установлены защитные элементы (поз. 20), снижающие возможное воздействие статического электричества на порты вычислительного модуля (подключенные к модулю ввода информации) в моменты взаимодействия человека с модулем ввода информации.
Необязательно, в блоке ввода информации может присутствовать интерфейсный модуль (поз. 22), осуществляющий передачу информации с вычислительного модуля в управляющие (либо любые другие) системы.
Необязательно, в блоке ввода информации может присутствовать модуль индикации (поз. 19), осуществляющий индикацию факта (не)срабатывания емкостной кнопки посредством световых, звуковых (или любых иных способов, к которым восприимчив человеческий организм).
Необязательно, на печатной плате блока ввода информации может присутствовать модуль для программирования вычислительного модуля (поз. 23).
Для апробации идеи был реализован опытный образец (фиг. 2) с квадратной формой емкостных элементов модуля ввода информации (поз. 7). При создании опытного образца была использована 4-слойная печатная плата (поз. 8) со следующим расположением слоев (Таблица 1):
Таблица 1
Каждому из двух модулей ввода информации (поз. 7) в данном случае принадлежит свой вычислительный модуль (поз. 1), что связано с ограниченными возможностями используемого для апробации идеи вычислительного модуля (в плане количества доступных портов, используемых для измерения емкости).
Разнесение емкостных кнопок и вычислительных модулей по разным сторонам печатной платы обеспечивает минимизацию влияния работы вычислительного модуля на результаты измерения емкости емкостных элементов емкостных кнопок.
Однако, при правильной компоновке, вполне допустимым будет расположение емкостных кнопок и вычислительных модулей на одной стороне печатной платы (зависит в т. ч. и от размеров печатной платы). Количество внутренних слоев печатной платы (поз. 8) также не является фиксированным и может меняться как в большую, так и в меньшую сторону.
Помимо вычислительных модулей на 4 слое печатной платы расположены:
• два элемента индикации (поз. 2), сигнализирующих о факте срабатывания емкостной кнопки посредством световых сигналов (светодиоды);
• два элемента оснастки (поз. 3) для программирования вычислительных модулей (разъемы для программирования);
• элементы защиты (резисторы) вычислительного модуля от электростатического разряда (поз. 4) с человека в моменты его взаимодействия с емкостными кнопками, включенные в разрыв электрических связей между вычислительным модулем и емкостными элементами;
• тестовые точки (поз. 5) для передачи информации о состоянии емкостных кнопок в другие управляющие (регистрирующие) системы прибора, где данная информация будет использоваться по непосредственному назначению (например, для отображения информации на дисплее прибора);
• тестовые точки (поз. 6) для подведения питающего рабочего напряжения к вычислительным модулям.
Фиг. 3 является блок-схемой, отображающей способ обработки измеренных фактических значений емкости емкостных элементов многоэлементной емкостной кнопки согласно предлагаемому способу осуществления изобретения:
• на этапе поз. 9 получают фактические значения емкости для всех емкостных элементов многоэлементной емкостной кнопки. Следует отметить, что наибольшую точность и достоверность получаемых данных обеспечивает единовременный опрос всех емкостных элементов, либо последовательный опрос за очень короткий промежуток времени;
• на этапе поз. 10 происходит нормировка фактически измеренных значений емкости емкостных элементов многоэлементной емкостной кнопки посредством системы весовых коэффициентов;
• на этапе поз. 11 рассчитывается адаптивный порог (плато), вычисляемый как среднее значение (арифметическое, квадратичное и т.д.) от всех одномоментно (либо с минимально возможной задержкой, но последовательно) измеренных и вычисленных (нормировка посредством весовых коэффициентов) фактических значений емкости емкостных элементов многоэлементной емкостной кнопки;
• на этапе поз. 12 вычислительный модуль производит расчет результирующих значений емкости всех емкостных элементов многоэлементной емкостной кнопки как разности между фактически измеренными и вычисленными (нормировка посредством весовых коэффициентов) фактическими значениями емкости емкостных элементов с одной стороны (А), и адаптивного порога (плато) (В) с другой стороны, т.е. (А – В);
• на этапе поз. 13 вычислительный модуль производит сравнение каждого из полученных результирующих значений емкости емкостных элементов многоэлементной емкостной кнопки (А) с нулем;
• в случае, когда ((А – В) > 0), полученное на этапе поз. 12 результирующее значение емкости конкретного емкостного элемента многоэлементной емкостной кнопки остается без изменений на этапе поз. 14;
• в случае, когда ((А – В) < 0), полученное на этапе 104 результирующее значение емкости конкретного емкостного элемента многоэлементной емкостной кнопки приравнивается к нулю на этапе поз. 15;
• на этапе поз. 16 вычислительный модуль на основании анализа полученных на этапах поз. 14 и поз. 15 результирующих значений емкости емкостных элементов многоэлементной емкостной кнопки принимает решение о том была ли нажата емкостная кнопка в целом (посредством заложенных в программном обеспечении вычислительного модуля алгоритмов, искусственного интеллекта, либо любым другим способом).
• Затем алгоритм действий, изображенный на фиг. 3, повторяется с начала (с этапа, обозначенного как поз. 9).
Для большего понимания рассмотрим пример многоэлементной емкостной кнопки, состоящей из 25 независимых емкостных элементов (двумерный массив 5 х 5 емкостных элементов).
В результате этапа поз. 9 получаем фактически измеренные значения емкости для каждого из емкостных элементов многоэлементной емкостной кнопки (обозначим их как Uху, где х – горизонтальная координата элемента в двумерном массиве, у – вертикальная координата элемента в двумерном массиве).
Измеренные фактические значения емкости емкостных элементов многоэлементной емкостной кнопки, выраженные в относительных величинах, предоставлены на фиг. 4.
Для вычислений, описанных на этапе поз. 10, необходимо ввести систему весовых коэффициентов, представленную на фиг. 5 (обозначим весовые коэффициенты как Wху, где х – горизонтальная координата коэффициента в двумерном массиве, у – вертикальная координата коэффициента в двумерном массиве).
Непосредственно на поз. 10 перемножим фактически измеренные значения емкости емкостных элементов (Uxy) на соответствующие им весовые коэффициенты (Wxy), т. е. (Wxy⋅Uxy). В результате вычислений получим фактически измеренные и нормированные значения емкости емкостных элементов (обозначим их как Zху, где х – горизонтальная координата элемента в двумерном массиве, у – вертикальная координата элемента в двумерном массиве). Полученные в результате нормировки данные отобразим на фиг. 6.
Также отобразим полученные значения фактически измеренных (до нормировки) и нормированных значений емкости емкостных элементов многоэлементной емкостной кнопки, выраженные в относительных величинах, в виде гистограмм (см. фиг. 7).
На этапе поз. 11 рассчитаем адаптивный порог (плато) посредством вычисления как среднего значение (ZСР) от всех измеренных и вычисленных (нормировка посредством весовых коэффициентов) фактических значений емкости емкостных элементов многоэлементной емкостной кнопки (представленных на фиг. 6).
На этапе поз. 12 произведем вычисление результирующих значений емкости всех емкостных элементов многоэлементной емкостной кнопки как разности между фактически измеренными и вычисленными (нормировка посредством весовых коэффициентов) значениями емкости емкостных элементов с одной стороны и адаптивного порога (плато) с другой стороны, т.е.  Обозначим полученные значения как
Обозначим полученные значения как  (где х – горизонтальная координата элемента в двумерном массиве, у – вертикальная координата элемента в двумерном массиве).
(где х – горизонтальная координата элемента в двумерном массиве, у – вертикальная координата элемента в двумерном массиве).
На этапе поз. 15 для исключения отдельных отрицательных результирующих значений емкости  емкостных элементов в случае, когда
емкостных элементов в случае, когда  приравняем соответствующее
приравняем соответствующее  значение
значение  к нулю, т. е.:
к нулю, т. е.:

Полученные результаты вычисления результирующих значений емкости емкостных элементов относительно плато (Sxy) отобразим на фиг. 8.
Также отобразим полученные значения фактически измеренных (и нормированных) значений емкости емкостных элементов многоэлементной емкостной кнопки в сравнении с результирующими значениями емкости емкостных элементов относительно плато (форма емкости емкостной кнопки), в виде гистограмм (см. фиг. 9).
На этапе поз. 16 программный алгоритм вычислительного модуля позволяет явно и безошибочно выделить факт срабатывания отдельных элементов емкостной кнопки, т. к. в таком случае форма емкости многоэлементной емкостной кнопки будет представлять собой единичный куполообразный объект при нажатии. Именно форма емкости является ключевым критерием определения факта нажатия кнопки.
Данный вариант реализации многоэлементной емкостной кнопки не имеет аналогов и обладает рядом существенных преимуществ по сравнению с обычными емкостными кнопками:
1. Повышенная защита от ложных срабатываний при воздействии внешних факторов (вода, дождь на поверхности кнопки, помехи);
2. Однозначное определение факта нажатия кнопки;
3. Возможность введения обучения кнопки и большое количество информации при нажатии для алгоритмизации кнопки (в т. ч. для обработки полученных с кнопки данных нейронной сетью).
Заявителю не известны технические решения, обладающие указанными отличительными признаками, обеспечивающие в совокупности указанный результат, поэтому он считает, что заявляемая конструкция блока ввода информации, а также способ распознавания прикосновения к блоку ввода информации соответствуют критерию «изобретательский уровень».
Предлагаемое техническое решение было апробировано на реальном опытном образце, показав свои явные преимущества в сравнении с известными техническими решениями и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода информации | 1988 |
|
SU1534452A1 |
| Сенсорная панель для устройства ввода информации | 1990 |
|
SU1718211A1 |
| Устройство для ввода информации | 1986 |
|
SU1434420A1 |
| Интерактивные шахматы | 2023 |
|
RU2799731C1 |
| Устройство для ввода информации | 1987 |
|
SU1462284A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2000 |
|
RU2166203C1 |
| Устройство для ввода информации | 1989 |
|
SU1656519A1 |
| БЕСПРОВОДНОЙ СТИЛУС ДЛЯ ИЗОЛИРОВАННОГО ОТ ОКРУЖАЮЩЕЙ СРЕДЫ УСТРОЙСТВА ВВОДА И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ОСНОВЕ ЭЛЕКТРОМАГНИТНОГО РЕЗОНАНСА И ИЗОЛИРОВАННОЕ ОТ ОКРУЖАЮЩЕЙ СРЕДЫ УСТРОЙСТВО ВВОДА И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ОСНОВЕ ЭЛЕКТРОМАГНИТНОГО РЕЗОНАНСА (ВАРИАНТЫ) | 2021 |
|
RU2760765C1 |
| Проекционно-ёмкостная сенсорная панель и способ её изготовления | 2016 |
|
RU2695493C2 |
| ОДНОСТОРОННИЙ ЕМКОСТНОЙ ДАТЧИК УСИЛИЯ ДЛЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2009 |
|
RU2454702C1 |
Изобретение относится к близостным переключателям, выполненным с использованием емкостных детекторов. Техническим результатом является повышенная помехозащищенность блока ввода информации от внешних возмущающих воздействий, что позволяет использовать его в особо жестких условиях эксплуатации, в т. ч. в качестве изделия промышленного применения. Помехоустойчивый блок ввода информации содержит модуль ввода информации, состоящий из множества независимых емкостных элементов с размером каждого, не превышающим либо незначительно превышающим площадь контакта человеческого пальца, и расстоянием между элементами, способствующим изменению значения емкости сразу нескольких емкостных элементов при взаимодействии человека с модулем ввода информации в целом, площадь модуля ввода информации в целом превышает максимальную площадь нажатия человеческого пальца, и вычислительный модуль для измерения фактических значений емкости емкостных элементов. Вычислительный модуль выполнен с возможностью нормировки фактически измеренных значений емкости емкостных элементов; определения адаптивного порога; вычисления результирующих значений емкости с учетом адаптивного порога; сравнения результирующих значений емкости с адаптивным порогом; принятия решения о факте наличия или отсутствия нажатия на модуль ввода информации в целом. 2 н. и 14 з.п. ф-лы, 9 ил., 1 табл.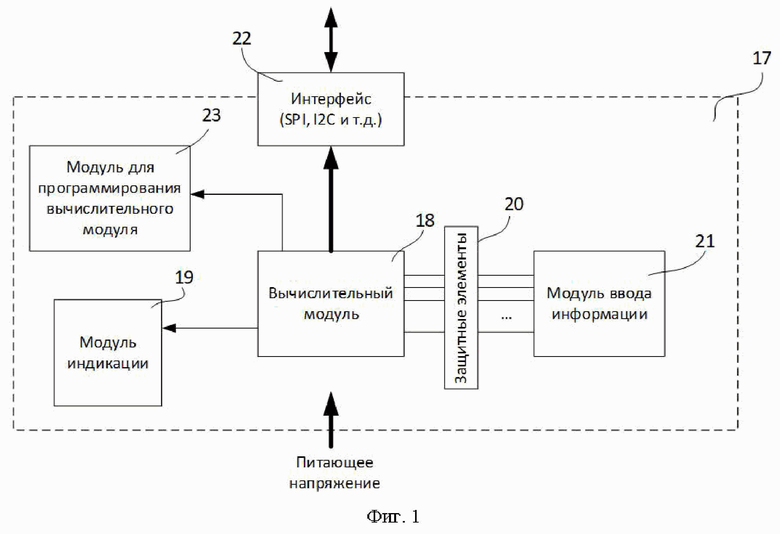
1. Помехоустойчивый блок ввода информации, содержащий модуль ввода информации, состоящий из множества независимых емкостных элементов с размером каждого, не превышающим либо незначительно превышающим площадь контакта человеческого пальца, и расстоянием между элементами, способствующим изменению значения емкости сразу нескольких емкостных элементов при взаимодействии человека с модулем ввода информации в целом, причем площадь, занимаемая модулем ввода информации в целом, должна превышать максимальную площадь нажатия человеческого пальца, и вычислительный модуль, предназначенный для измерения фактических значений емкости емкостных элементов и дальнейшего преобразования полученных значений, при этом вычислительный модуль характеризуется функциональными возможностями, заключающимися, после измерения фактических значений емкости емкостных элементов, в:
- нормировке всех фактически измеренных значений емкости емкостных элементов модуля ввода информации посредством системы весовых коэффициентов;
- определении адаптивного порога как среднего значения от всех одномоментно либо с минимально возможной задержкой, но последовательно измеренных и нормированных посредством весовых коэффициентов фактических значений емкости емкостных элементов;
- вычислении результирующих значений емкости всех емкостных элементов модуля ввода информации как разности между измеренными и нормированными посредством весовых коэффициентов фактическими значениями емкости емкостных элементов с одной стороны (А) и адаптивного порога (В) с другой стороны, т.е. (А – В);
- сравнении каждого из полученных результирующих значений емкости всех емкостных элементов с адаптивным порогом (В), причем, если (А – В) < 0, результирующее значение емкости данного емкостного элемента приравнивается к нулю, если (А – В) > 0, полученное ранее результирующее значение емкости остается без изменений;
- использовании распределения результирующих значений емкости всех емкостных элементов для принятия решения о факте наличия или отсутствия нажатия на модуль ввода информации в целом.
2. Блок ввода информации по п. 1, отличающийся тем, что геометрической формой емкостных элементов и модуля ввода информации может быть квадрат, прямоугольник, круг, овал или ромб.
3. Блок ввода информации по п. 1, отличающийся тем, что каждый из емкостных элементов, входящих в состав модуля ввода информации, имеет свой весовой коэффициент линейный или в виде функции, уравнивающий показания каждого из емкостных элементов при одинаковом внешнем воздействии.
4. Блок ввода информации по п. 1, отличающийся тем, что количество независимых емкостных элементов определяется особенностями дизайна, требуемой точностью, помехозащищенностью модуля ввода информации и вычислительными способностями вычислительного модуля.
5. Блок ввода информации по п. 1, отличающийся тем, что измерение фактических значений емкости всех емкостных элементов модуля ввода информации осуществляется непосредственно вычислительным модулем либо по меньшей мере одним сторонним модулем, который в дальнейшем осуществляет передачу измеренных фактических значений емкости в вычислительный модуль, а измерение емкости осуществляется посредством обнаружения изменения электрических характеристик емкостных элементов модуля ввода информации вследствие возникновения емкостной или гальванической связи между модулем ввода информации и оператором, совершающим ввод информации.
6. Блок ввода информации по п. 1, отличающийся тем, что измерение фактических значений емкости всех емкостных элементов модуля ввода информации 21 осуществляется одномоментно либо с минимально возможной задержкой последовательно.
7. Блок ввода информации по п. 1, отличающийся тем, что вычислительный модуль хранит в себе либо в стороннем модуле памяти систему весовых коэффициентов линейных или в виде функции для всех емкостных элементов модуля ввода информации.
8. Блок ввода информации по п. 1, отличающийся тем, что вычислительный модуль хранит в себе либо в стороннем модуле памяти программное обеспечение, необходимое для измерения и обработки значений емкости всех емкостных элементов модуля ввода информации.
9. Блок ввода информации по п. 1, отличающийся тем, что оснастка предназначена для программирования вычислительного модуля либо дополнительных модулей, работающих вместе с вычислительным модулем.
10. Блок ввода информации по п. 1, отличающийся тем, что по факту определения наличия или отсутствия нажатия на модуль ввода информации вычислительный модуль осуществляет индикацию события посредством модуля индикации.
11. Блок ввода информации по п. 1, отличающийся тем, что по факту определения наличия или отсутствия нажатия на модуль ввода информации вычислительный модуль осуществляет передачу определенной информации в другие управляющие или регистрирующие системы посредством интерфейсного модуля, который может быть выполнен как в виде отдельного модуля, так и быть частью самого вычислительного модуля.
12. Блок ввода информации по п. 1, отличающийся тем, что электрическая связь дополнительных модулей с вычислительным модулем обеспечена посредством печатных проводников на поверхности либо во внутренних слоях печатной платы.
13. Блок ввода информации по п. 1, отличающийся тем, что на модули блока ввода информации обеспечено подведение внешнего питающего напряжения посредством печатных проводников на поверхности либо во внутренних слоях печатной платы.
14. Блок ввода информации по п. 1, отличающийся тем, что для защиты входящих в него модулей от поражения электростатическим разрядом с человека в разрыв электрических связей от модуля ввода информации к другим необходимым и возможным модулям устанавливаются защитные элементы.
15. Способ распознавания прикосновения к блоку ввода информации, включающий:
- использование в вычислениях емкости всех емкостных элементов значений, нормированных посредством системы весовых коэффициентов, представленных линейно или в виде функции;
- использование в качестве опорных значений емкости для всех емкостных элементов модуля ввода информации адаптивного порога, вычисляемого как среднее значение от всех одномоментно либо с минимально возможной задержкой, но последовательно измеренных и нормированных посредством весовых коэффициентов вычислительным модулем фактических значений емкости емкостных элементов;
- вычисление результирующих значений емкости всех емкостных элементов, входящих в модуль ввода информации, как разности между измеренными и нормированными посредством весовых коэффициентов фактическими значениями емкости емкостных элементов с одной стороны (А) и адаптивного порога (В) с другой стороны, т.е. (А – В), причем, для исключения отрицательных результирующих значений емкости отдельных емкостных элементов, в случае когда ((А – В) < 0), результирующее значение емкости данного емкостного элемента, входящего в модуль ввода информации, приравнивается к нулю; в случае, когда ((А – В) > 0), полученное ранее результирующее значение емкости остается без изменений;
- использование распределения результирующих значений емкости емкостных элементов для принятия решения о факте наличия или отсутствия нажатия на модуль ввода информации в целом.
16. Способ распознавания прикосновения к блоку ввода информации по п. 15, отличающийся тем, что при вычислении адаптивного порога используется способ получения среднего арифметического или квадратичного значения средней величины.
| US 20100289759 A1, 18.11.2010 | |||
| US 20170024078 A1, 26.01.2017 | |||
| US 20150138147 A1, 21.05.2015 | |||
| ЕМКОСТНЫЙ ДАТЧИК КАСАНИЯ, ИМЕЮЩИЙ КОРРЕЛЯЦИЮ С ПРИЕМНИКОМ | 2011 |
|
RU2597519C2 |
| ЕМКОСТНЫЙ СЕНСОРНЫЙ ЭЛЕМЕНТ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И ЕМКОСТНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ ПРИКОСНОВЕНИЯ | 2010 |
|
RU2498390C2 |
