Уровень техники
[0001] Варианты осуществления настоящего изобретения относятся к системам измерения расхода технологической текучей среды и, более конкретно, к двухсенсорному вихревому расходомеру, который обеспечивает измерение скорости потока текучей среды на основе одного или обоих датчиков.
[0002] Вихревые расходомеры используются в области управления производственным процессом для непосредственного измерения расхода текучей среды через трубопровод. Вихревые расходомеры типично вставляются в трубу или трубопровод, который переносит текучую среду, которая должна быть измерена. Принцип работы вихревого расходомера основывается на явлении вихреобразования, известного как эффект вихревой дорожки фон Кармана. Когда текучая среда проходит плохо обтекаемое тело или вихреобразователь, небольшие вихри или завихрения распространяются поочередно вдоль и за каждую сторону вихреобразователя с частотой распространения, которая пропорциональна скорости потока текучей среды. Вихревой расходомер использует датчик для обнаружения завихрений и определяет частоту их распространения. Вихревой расходомер может затем выводить показатель измерения скорости на основе определенной частоты распространения.
[0003] Вихревые расходомеры могут использовать различные типы датчиков для обнаружения завихрений, распространяемых от вихреобразователя. Некоторые вихревые расходомеры используют датчик изгибающего момента, который также известен как «крыло», для определения скорости потока текучей среды. Изгибающий момент включает в себя тензометрический датчик, который может быть присоединен к вихреобразователю или к балке, которая позиционируется ниже по потоку от вихреобразователя. Во время измерения потока текучей среды чередующиеся распространяемые завихрения от вихреобразователя формируют чередующиеся комбинации высокого и низкого давления на каждой стороне вихреобразователя или балки. Это вызывает колебательное напряжение вихреобразователя или балки с частотой, которая соответствует частоте распространения. Вихревой расходомер использует тензометрический датчик для обнаружения характера колебательного напряжения и определения частоты распространения, из которой определяется скорость потока текучей среды.
[0004] Вихревые расходомеры могут также использовать ультразвуковой датчик для обнаружения частоты распространения. Ультразвуковые датчики включают в себя излучатель и приемник, которые позиционируются на противоположных сторонах ниже по потоку текучей среды от вихреобразователя. Излучатель передает ультразвуковые волны через образующиеся завихрения, которые обнаруживаются приемником. Завихрения создают локализованные колебательные изменения в наблюдаемых параметрах потока, таких как давление или скорость. Когда ультразвуковые волны передаются через завихрения, завихрения создают разность фаз между передаваемой волной и волной, принимаемой приемником, которая зависит от силы и скорости завихрений. Обнаруживаемые разности фаз используются расходомером для вычисления скорости потока текучей среды.
Сущность изобретения
[0005] Варианты осуществления настоящего изобретения, в целом, направлены на вихревой расходомер и способы использования вихревого расходомера для измерения расхода потока текучей среды. Один вариант осуществления вихревого расходомера включает в себя корпус, имеющий внутреннюю полость, вихреобразователь, поддерживаемый корпусом и протягивающийся во внутреннюю полость по первой оси, которая является наклонной к центральной оси полости, ультразвуковой датчик, датчик изгибающего момента и контроллер. Ультразвуковой датчик поддерживается корпусом на стороне ниже по потоку от вихреобразователя и конфигурируется, чтобы создавать выходной сигнал расхода ультразвукового датчика, который указывает расход потока текучей среды через внутреннюю полость. Ультразвуковой датчик включает в себя ультразвуковой излучатель и ультразвуковой приемник, которые позиционируются на противоположных сторонах внутренней полости. Датчик изгибающего момента поддерживается корпусом на нижней по потоку стороне вихреобразователя и конфигурируется для создания выходного сигнала расхода датчика изгибающего момента, который указывает расход потока текучей среды через внутреннюю полость. Датчик изгибающего момента включает в себя балку, протягивающуюся от стенки внутренней полости по первой оси. Контроллер конфигурируется, чтобы формировать показатель измерения расхода, который указывает расход на основе выходного сигнала расхода ультразвукового датчика и/или выходного сигнала расхода датчика изгибающего момента.
[0006] Один вариант осуществления способа измерения расхода потока текучей среды с помощью вихревого расходомера включает в себя позиционирование вихреобразователя вихревого расходомера в потоке текучей среды. Когда расход меньше первого порогового расхода, измерение расхода в режиме слабого потока выполняется с помощью выходного сигнала расхода ультразвукового датчика, создаваемого ультразвуковым датчиком вихревого расходомера. Когда расход больше второго порогового расхода, который больше первого порогового расхода, измерение расхода в режиме сильного потока выполняется с помощью выходного сигнала расхода датчика изгибающего момента, создаваемого датчиком изгибающего момента вихревого расходомера. Когда расход находится между первым и вторым пороговыми расходами, измерение расхода в режиме среднего потока выполняется с помощью выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
[0007] Данная сущность предусмотрена для того, чтобы в упрощенной форме представить набор идей, которые дополнительно описываются ниже в подробном описании. Эта сущность не предназначена для того, чтобы идентифицировать ключевые признаки или важнейшие признаки заявляемого предмета изобретения, а также не предназначена для того, чтобы быть использованной в качестве помощи при определении области применения заявляемого предмета изобретения. Заявленный предмет изучения не ограничивается реализациями, которые решают какие-либо или все недостатки, отмеченные в уровне техники.
Краткое описание чертежей
[0008] Фиг. 1 является упрощенной схемой примерной системы измерения производственного процесса в соответствии с вариантами осуществления настоящего изобретения.
[0009] Фиг. 2 является упрощенным видом спереди примерного вихревого расходомера, в соответствии с вариантами осуществления настоящего изобретения.
[0010] Фиг. 3 и 4 являются видами сверху и сбоку в поперечном сечении для примерного вихревого расходомера по фиг. 2, взятом, в целом, по линиям 3-3 и 4-4, соответственно, в соответствии с вариантами осуществления настоящего изобретения.
Подробное описание иллюстративных вариантов осуществления
[0011] Варианты осуществления настоящего изобретения описываются более полно далее в данном документе со ссылкой на сопровождающие чертежи. Элементы, которые идентифицируются с помощью одинаковых или аналогичных ссылочных символов, ссылаются на одинаковые или аналогичные элементы. Различные варианты осуществления настоящего изобретения могут быть осуществлены во множестве различных форм и не должны истолковываться как ограниченные конкретными вариантами осуществления, изложенными в данном документе. Скорее, эти варианты осуществления предоставляются таким образом, что это описание будет полным и законченным и будет полностью передавать рамки настоящего изобретения специалистам в области техники.
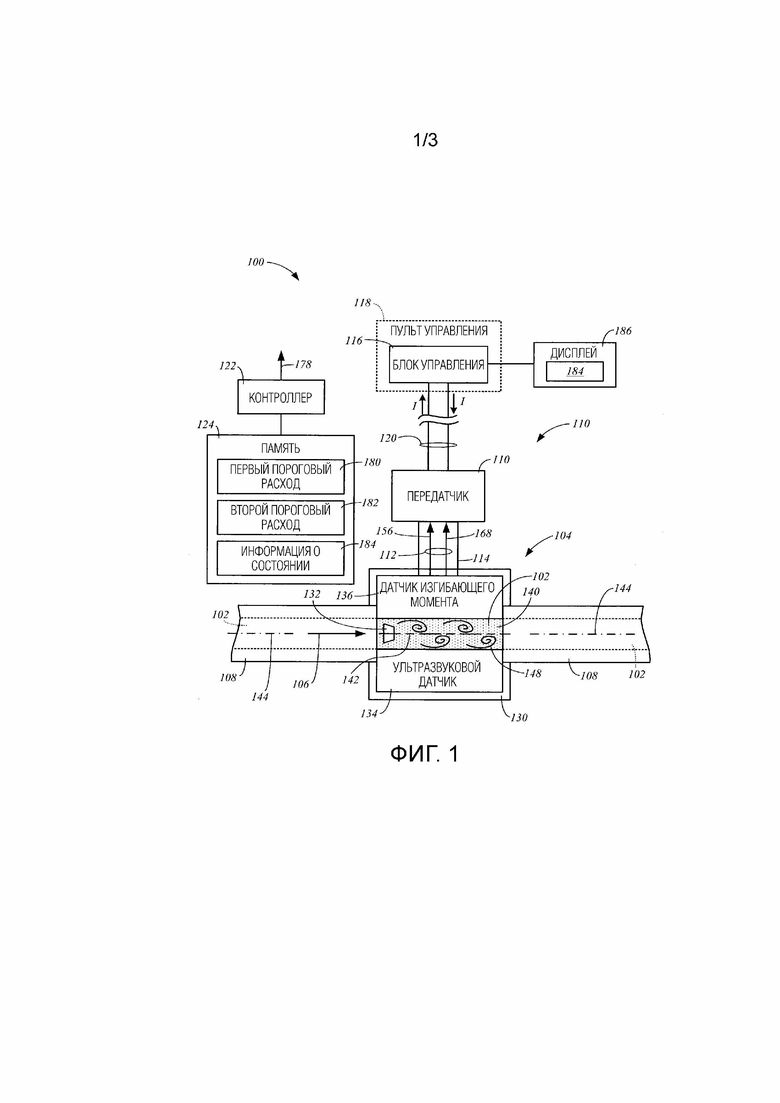
[0012] Фиг. 1 является упрощенной схемой примерной системы 100 измерения производственного процесса в соответствии с вариантами осуществления настоящего изобретения. Система 100 может быть использована в обработке технологической текучей среды 102, такой как жидкость или газ, чтобы преобразовывать технологическую текучую среду 102 из менее ценного состояния в более ценные и полезные продукты, такие как нефтепродукты, химические продукты, бумагу, пищу и т.д. Например, нефтеперерабатывающий завод выполняет производственные процессы, которые могут обрабатывать сырую нефть в бензин, нефтяное топливо и другие нефтехимические продукты.
[0013] Система 100 включает в себя вихревой расходомер 104 в соответствии с вариантами осуществления настоящего изобретения. Вихревой расходомер 104 конфигурируется, чтобы оценивать или измерять скорость или расход потока 106 технологической текучей среды 102 через трубу 108, или другую технологическую камеру, системы 100. Показатель измерения расхода, оцененный посредством расходомера 104, может быть использован для определения объемных и массовых расходов технологической текучей среды 102 с помощью традиционных методов на основе параметров трубы 108, таких как площадь ее поперечного сечения, и параметров технологической текучей среды 102, таких как ее температура, давление и/или плотность.
[0014] В некоторых вариантах осуществления система 100 включает в себя передатчик 110, который конфигурируется, чтобы принимать информацию 112 о расходе от вихревого расходомера 104 по подходящей проводной или беспроводной линии 114 связи. Передатчик 110 также конфигурируется, чтобы передавать информацию 112 о расходе блоку 116 управления (например, вычислительному устройству), которое может быть расположено удаленно от передатчика 110 в пункте 118 управления, например, как показано на фиг. 1. Блок 116 управления может быть соединен с возможностью связи с передатчиком 110 по подходящей физической линии связи, такой как двухпроводной контур 120 управления, или беспроводной линии связи. Обмен данными между блоком 116 управления и передатчиками 110 может выполняться по контуру 120 управления в соответствии с традиционными аналоговыми и/или цифровыми протоколами связи.
[0015] В некоторых вариантах осуществления контур 120 управления включает в себя контур управления 4-20 мА, по которому информация 114 о расходе может быть представлена посредством уровня тока I контура, протекающего по контуру 120 управления, в соответствии с традиционным аналоговым протоколом связи. Примерные цифровые протоколы связи включают в себя модуляцию цифровых сигналов по аналоговому уровню тока двухпроводного контура 120 управления, например, в соответствии со стандартом связи HART®. Другие чисто цифровые способы могут также быть использованы, включающие в себя протоколы связи FieldBus и Profibus.
[0016] Передатчик 110 может также быть сконфигурирован, чтобы связываться беспроводным образом с блоком 116 управления с помощью традиционного протокола беспроводной связи. Например, передатчик 110 может быть сконфигурирован, чтобы реализовывать протокол беспроводной ячеистой сети, такой как WirelessHART® (IEC 62591) или ISA 100.11a (IEC 62734), или другой протокол беспроводной связи, такой как WiFi, LoRa, Sigfox, BLE или любой другой подходящий протокол.
[0017] Питание может подаваться к передатчику 110 и вихревому расходомеру 104 от любого подходящего источника питания. Например, передатчик 110 и/или вихревой расходомер 104 могут целиком питаться током I, протекающим через контур 120 управления. Один или более источников питания могут также быть использованы для питания передатчика 110 и вихревого расходомера 104, такие как внутренний или внешний аккумулятор. Генератор электрической мощности (например, солнечная панель, ветрогенератор) может также быть использован для питания передатчика 110 или вихревого расходомера 104 или заряда источника питания, используемого устройствами.
[0018] Контроллер 122 может представлять множество контроллеров системы 100, таких как контроллеры вихревого расходомера 104, передатчик 110 и блок 116 управления, например. Контроллер 122 включает в себя один или более процессоров (т.е. микропроцессор, центральный процессор и т.д.), которые выполняют одну или более функций, описанных в данном документе, в ответ на исполнение инструкций, которые могут храниться локально на энергонезависимых компьютерно-читаемых носителях или в памяти 124. Память 124 может представлять память блока 116 управления, память передатчика 110 и/или память вихревого расходомера 104.
[0019] В некоторых вариантах осуществления процессоры контроллера 122 являются компонентами одной или более компьютерных систем, такими как блок 116 управления. Контроллер 122 может включать в себя одну или более схем управления, микропроцессорных систем управления двигателем, один или более программируемых компонентов аппаратных средств, таких как программируемая пользователем вентильная матрица (FPGA), которые используются для управления компонентами системы 100 наблюдения и/или выполнения одной или более функций, описанных в данном документе. Контроллер 122 может также представлять другую традиционную схему передатчика 110, расходомера 104 и блока 116 управления. Соответственно, контроллер 122 может представлять компоненты вихревого расходомера 104, передатчика 110 и/или блока 116 управления, такие как компоненты обработки данных, компоненты передачи данных и/или другие компоненты, например.
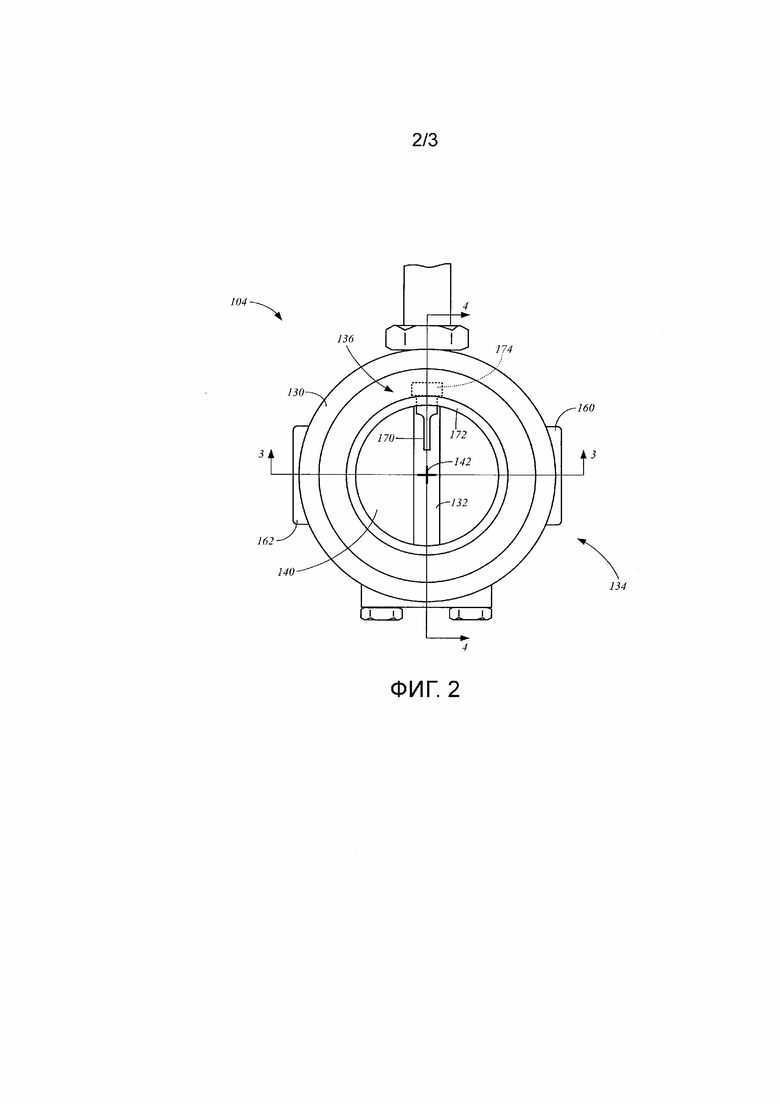
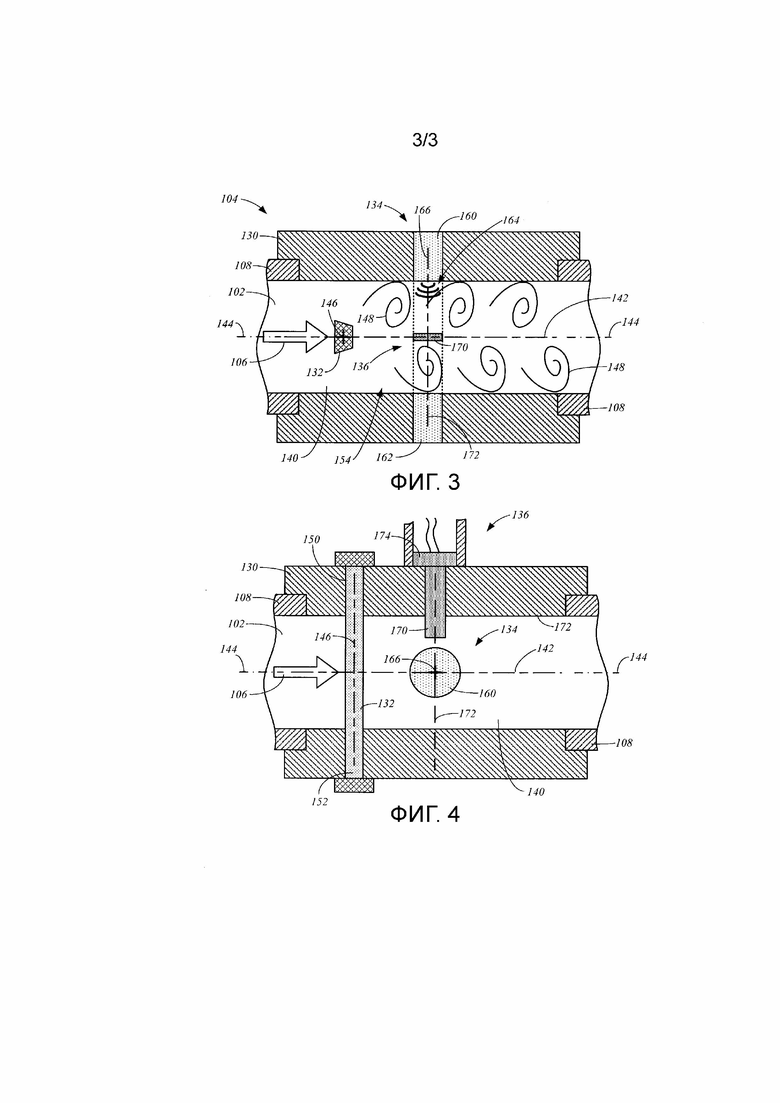
[0020] Фиг. 2 является упрощенным видом спереди по центральной оси 142 примерного вихревого расходомера 104 в соответствии с вариантами осуществления настоящего изобретения. Фиг. 3 и 4 соответственно являются видами сверху и сбоку в поперечном сечении для примерного вихревого расходомера 104 по фиг. 2, взятом, в целом, по линиям 3-3 и 4-4, соответственно, в соответствии с вариантами осуществления настоящего изобретения.
[0021] Некоторые варианты осуществления вихревого расходомера 104 включают в себя корпус 130, вихреобразователь 132, ультразвуковой датчик 134 и датчик 136 изгибающего момента, как показано на фиг. 1. Как обсуждается ниже более подробно, двухсенсорная конфигурация вихревого расходомера 104 предоставляет преимущества над традиционными вихревыми расходомерами, которые используют только один датчик, такой как либо датчик изгибающего момента, либо ультразвуковой датчик, например.
[0022] Корпус 130 включает в себя внутреннюю полость 140, такую как трубчатая внутренняя полость, имеющая центральную ось 142. Корпус 130 может быть соединен в ряд с трубой 108, так что центральная ось 142 является практически соосной с центральной осью 144 трубы 108, как показано на фиг. 1.
[0023] Вихреобразователь 132 поддерживается корпусом 130 и протягивается во внутреннюю полость 140 по оси 146, которая является наклонной к центральной оси 142, как показано на фиг. 4. В некоторых вариантах осуществления вихреобразователь 132 имеет традиционную форму поперечного сечения, которая конфигурируется, чтобы распространять завихрения 148 в ответ на поток 106 текучей среды, как показано на фиг. 1 и 3. В одном примерном варианте осуществления вихреобразователь 132 имеет трапециевидную форму поперечного сечения, как показано на фиг. 3. Вихреобразователь 132 может протягиваться через центр полости 140, так что ось 146 пересекает ось 142, как показано на фиг. 4. В некоторых вариантах осуществления каждый конец 150 и 152 вихреобразователя 132 присоединяется к корпусу 130. Альтернативно, вихреобразователь 132 может быть прикреплен к корпусу только на одном из концов 150 или 152.
[0024] Ультразвуковой датчик 134 может принимать любую подходящую форму. В некоторых вариантах осуществления ультразвуковой датчик 134 поддерживается корпусом 130 на нижней по потоку стороне 154 вихреобразователя 132 относительно потока 106 текучей среды, как показано на фиг. 3 и 4. Ультразвуковой датчик 134 конфигурируется, чтобы создавать выходной сигнал 156 расхода ультразвукового датчика (фиг. 1), который указывает расход потока 106 текучей среды через внутреннюю полость 140.
[0025] Ультразвуковой датчик 134 включает в себя излучатель 160 и приемник 162, которые поддерживаются корпусом 130 на противоположных сторонах внутренней полости 140, как показано на фиг. 3. Излучатель 160 конфигурируется, чтобы передавать ультразвуковые волны 164 (фиг. 3) через завихрения 148, которые принимаются приемником 162. Ультразвуковые волны 164 подвергаются сдвигу фазы относительно их передаваемой формы вследствие столкновения с завихрениями 148. Таким образом, волны 164, принимаемые приемником 162, имеют разность фаз относительно их передаваемой формы. Выходной сигнал 156 расхода, выводимый ультразвуковым датчиком 134, может указывать эту разность фаз, которая изменяется со временем вследствие прохождения завихрений 148. Изменяющийся выходной сигнал 156 может быть использован контроллером 122, чтобы определять частоту распространения и расход потока 106 текучей среды, в соответствии с традиционными способами.
[0026] Излучатель 160 и приемник 162 могут быть выровнены по оси 166. В некоторых вариантах осуществления ось 166 проходит через центральную ось 142 полости 140. В некоторых вариантах осуществления ось 166 проходит наклонно к оси 146 и центральной оси 142 и проходит через центральную ось 142, излучатель 160 и приемник 162, как указано на фиг. 3 и 4.
[0027] Датчик 136 изгибающего момента может принимать любую подходящую форму. В некоторых вариантах осуществления датчик 136 изгибающего момента поддерживается корпусом 130 на нижней по потоку стороне 154 от вихреобразователя 132, как показано на фиг. 3 и 4. В некоторых вариантах осуществления датчик 136 изгибающего момента конфигурируется, чтобы создавать выходной сигнал 168 расхода датчика изгибающего момента (фиг. 1), который указывает расход потока 106 текучей среды через внутреннюю полость 140.
[0028] В некоторых вариантах осуществления датчик 136 изгибающего момента включает в себя балку 170, которая протягивается от стенки 172 корпуса 130 во внутреннюю полость 140 по плоскости 172, которая может быть практически параллельна оси 146, как показано на фиг. 4. В некоторых вариантах осуществления балка 170 является смещенной от центральной оси 142, как показано на фиг. 4. В некоторых вариантах осуществления плоскость 172 проходит наклонно к центральной оси 142 и через балку 170, ультразвуковой излучатель 160 и ультразвуковой приемник 162, как показано на фиг. 3 и 4.
[0029] Датчик 136 изгибающего момента может также включать в себя датчик 174 механического напряжения или крутящего момента, который используется для обнаружения механического напряжения или крутящего момента на балке 170, в соответствии с традиционными датчиками изгибающего момента. Выходной сигнал 168 от измерительного датчика 174 может быть использован контроллером 122 для обнаружения частоты распространения завихрений 148 и оценки расхода потока 106 текучей среды, в соответствии с традиционными способами.
[0030] В одном альтернативном варианте осуществления датчик 136 изгибающего момента может использовать вихреобразователь 132 вместо балки. Здесь, датчик 174 механического напряжения или крутящего момента используется для измерения механического напряжения или крутящего момента на вихреобразователе 132. Выходной сигнал 168 от измерительного датчика 174 затем используется контроллером 122 для обнаружения частоты распространения завихрений 148 и расхода потока 106 текучей среды, в соответствии с традиционными способами.
[0031] Компоненты контроллера 122 могут быть использованы для формирования показателя 178 измерения расхода, который указывает расход потока 106 текучей среды на основе выходного сигнала 156 расхода ультразвукового датчика и/или выходного сигнала 168 расхода датчика изгибающего момента. Таким образом, вихревой расходомер может быть описан как включающий в себя контроллер 122, который, в целом, означает, что компоненты контроллера 122, которые формируют показатель 178 измерения расхода, например, могут быть компонентами вихревого расходомера 104 (например, поддерживаемого корпусом), компонентами передатчика 110 и/или компонентами блока 116 управления.
[0032] В некоторых вариантах осуществления вихревой расходомер 104 включает в себя режим слабого потока, режим среднего потока и режим сильного потока. Вихревой расходомер 104 работает в режиме слабого потока, когда расход потока 106 текучей среды меньше первого порогового расхода 180, который может быть сохранен в памяти 124. Расходомер 104 работает в режиме среднего расхода, когда расход потока 106 текучей среды находится между первым пороговым расходом 180 и вторым пороговым расходом 182, который больше первого порогового расхода. Второй пороговый расход 182 может быть сохранен в памяти, как показано на фиг. 1, или в другом подходящем местоположении. Вихревой расходомер 104 работает в режиме сильного потока, когда расход потока 106 текучей среды больше второго порогового расхода 182.
[0033] Первый и второй пороговые расходы 180 и 182 могут быть заданы пользователем расходомера и сохранены в памяти. Первый и второй пороговые расходы 180 и 182 задаются на основе ожидаемых условий потока и диаметра трубы 108. В некоторых вариантах осуществления первый пороговый расход 180 может быть меньше 30 м3/ч, а второй пороговый расход 182 может быть больше 80 м3/ч. В одном примерном варианте осуществления, таком как для труб, имеющих внутренний диаметр 3 дюйма (номинальный диаметр 80 мм), первый пороговый расход 180 может быть задан в 10 м3/ч или менее, а второй пороговый расход 182 может быть задан в 100 м3/ч или больше. Таким образом, согласно этому примеру, вихревой расходомер 104 работает в режиме слабого потока для расходов около 0-10 м3/ч, вихревой расходомер 104 работает в режиме среднего потока для расходов около 10-100 м3/ч, и вихревой расходомер 104 работает в режиме сильного потока для расходов выше приблизительно 100 м3/ч. Другие пороговые расходы могут быть использованы для различных диаметров труб и условий.
[0034] Диапазоны расходов, соответствующие режиму слабого потока, режиму среднего потока и режиму сильного потока, выбираются, чтобы получать преимущества свойств ультразвукового датчика 134 и датчика 136 изгибающего момента. В целом, контроллер 122 использует выходной сигнал 156 расхода от ультразвукового датчика 134, когда расход является расходом, при котором ультразвуковой датчик 134, как ожидается, должен предоставлять достоверный выходной сигнал 156 расхода, и контроллер 122 не использует выходной сигнал 156 расхода от ультразвукового датчика 134, когда расход потока 106 текучей среды является расходом, при котором ультразвуковой датчик 134, как ожидается, должен предоставлять менее достоверный выходной сигнал 156 расхода относительно выходного сигнала 168 расхода датчика 136 изгибающего момента. Аналогично, контроллер 122 использует выходной сигнал 168 расхода от датчика 136 изгибающего момента, когда расход потока 106 текучей среды является расходом, при котором датчик 136 изгибающего момента, как ожидается, должен предоставлять достоверный выходной сигнал 168 расхода, и контроллер 122 не использует выходной сигнал 168 расхода от датчика 136 изгибающего момента, когда расход является расходом, при котором датчик 136 изгибающего момента, как ожидается, должен предоставлять менее достоверный выходной сигнал 168 расхода относительно выходного сигнала 156 расхода, создаваемого ультразвуковым датчиком 134.
[0035] Некоторые преимущества по отношению к ультразвуковому датчику 134 включают в себя высокую чувствительность, которая делает датчик 134 полезным в измерении очень слабых расходов текучей среды. Дополнительно, вибрация трубы не влияет значительно на точность измерений расхода, выполняемых ультразвуковым датчиком 134. Однако, способность ультразвукового датчика 134 точно измерять расход может подвергаться неблагоприятному воздействию увлекаемого газа в жидком потоке 106. Дополнительно, даже низкие уровни кавитации в потоке 106 могут неблагоприятно влиять на измерения расхода с помощью ультразвукового датчика 134.
[0036] Некоторые преимущества по отношению к датчику 136 изгибающего момента включают в себя способность обеспечивать относительно точные измерения расхода для жидких потоков 106, имеющих низкую концентрацию нерастворенного газа, и способность обеспечивать относительно точные измерения расхода в присутствие низкого уровня кавитации в потоке 106. Однако, датчик 136 изгибающего момента может не быть достаточно чувствительным, чтобы измерять низкие расходы. Дополнительно, вибрации трубы 108 могут неблагоприятно влиять на точность измерения расхода с помощью датчика 136 изгибающего момента.
[0037] Первый пороговый расход, как правило, выбирается, чтобы выбирать относительно низкий уровень диапазона расхода для потока 106 текучей среды, в котором выходной сигнал 168 расхода датчика изгибающего момента не является таким достоверным как выходной сигнал 156 расхода ультразвукового датчика. Дополнительно, при таких низких расходах, датчик 136 изгибающего момента является очень чувствительным к вибрации трубы 108, которые могут вынуждать выходной сигнал 168 расхода датчика изгибающего момента быть менее достоверным по сравнению с выходным сигналом 156 расхода ультразвукового датчика. Однако, при расходах, которые меньше первого порогового расхода 180, выходной сигнал 156 расхода ультразвукового датчика является относительно достоверным. Соответственно, контроллер 122 использует только выходной сигнал 156 расхода ультразвукового датчика при определении показателя измерения расхода для потока 106 текучей среды, когда вихревой расходомер 104 находится в режиме слабого потока, и не использует выходной сигнал 168 расхода датчика изгибающего момента.
[0038] Когда расход потока 106 текучей среды находится между первым и вторым пороговыми расходами 180 и 182, вихревой расходомер 104 работает в режиме среднего потока, и показатель 178 измерения расхода, сформированный контроллером 122, основывается на выходном сигнале 156 расхода ультразвукового датчика и выходном сигнале 168 расхода датчика изгибающего момента. Здесь, и ультразвуковой датчик 134, и датчик 136 изгибающего момента создают выходные сигналы 156 и 168 расхода, которые являются в значительной степени достоверными для диапазона расхода между первым и вторым пороговыми расходами 180 и 182. В некоторых вариантах осуществления контроллер 122 может использовать средний из расходов, указанных посредством выходного сигнала 156 расхода ультразвукового датчика и выходного сигнала 168 расхода датчика изгибающего момента, в качестве показателя 178 измерения расхода.
[0039] В некоторых вариантах осуществления, когда вихревой расходомер 104 работает в режиме сильного потока, контроллер 122 формирует показатель 178 измерения расхода на основе только выходного сигнала 168 расхода датчика изгибающего момента, а не на основе выходного сигнала 156 расхода ультразвукового датчика. Причина состоит в выборе второго порогового расхода 182, соответствующего расходу, при котором может ожидаться возникновение кавитации в потоке 106 текучей среды. Такая кавитация может неблагоприятно влиять на достоверность выходного сигнала 156 расхода ультразвукового датчика, в то время как выходной сигнал 168 расхода датчика изгибающего момента остается достаточно достоверным для того, чтобы основывать на нем показатель 178 измерения расхода. Таким образом, посредством устранения выходного сигнала 156 расхода ультразвукового датчика из определения показателя 178 измерения расхода контроллером 122 проблемы с измерением расхода, вызванные кавитацией, в значительной степени уменьшаются.
[0040] Дополнительные преимущества для использования ультразвукового датчика 134 и датчика 136 изгибающего момента включают в себя способность обнаруживать состояния потока 106 текучей среды и трубы 108. Примерные состояния потока 106 текучей среды, которые могут быть обнаружены контроллером 122 на основе выходного сигнала 156 расхода ультразвукового датчика и/или выходного сигнала 168 расхода изгибающего момента, включают в себя увлекаемый газ в потоке 106 текучей среды, кавитацию в потоке 106 текучей среды и отсутствие потока 106 текучей среды, например. Примерные состояния трубы 108, которые могут быть обнаружены контроллером 122 на основе выходного сигнала 156 расхода ультразвукового датчика и/или выходного сигнала 168 расхода датчика изгибающего момента, включают в себя состояние сильной вибрации.
[0041] Контроллер 122 может обнаруживать состояние потока 106 текучей среды и/или трубы 108, сравнивая расходы, указываемые посредством выходного сигнала 156 расхода ультразвукового датчика и выходного сигнала 168 расхода датчика изгибающего момента, и выдавать уведомление в ответ на обнаруженное состояние. Это является особенно эффективным, когда расход потока текучей среды находится между первым и вторым пороговыми расходами 180 и 182, и вихревой расходомер 104 работает в режиме среднего потока, в котором выходной сигнал 156 расхода ультразвукового датчика и выходной сигнал 168 расхода датчика изгибающего момента, каждый, обычно являются достоверными показателями расхода потока 106 текучей среды. Например, состояние увлекаемого газа или кавитации в потоке 106 текучей среды может быть обнаружено контроллером 122, когда выходной сигнал 168 расхода датчика изгибающего момента остается относительно устойчивым, в то время как выходной сигнал 156 расхода ультразвукового датчика изменяется ненормально по времени, вследствие того, что ультразвуковой датчик 136 является чувствительным к условиям увлекаемого газа и кавитации потока 106 текучей среды. Состояние сильной вибрации трубы может быть обнаружено контроллером 122, когда выходной сигнал 156 расхода ультразвукового датчика остается относительно устойчивым, в то время как выходной сигнал 168 расхода датчика изгибающего момента изменяется ненормально по времени, вследствие того, что датчик изгибающего момента является чувствительным к сильным вибрациям трубы 108.
[0042] Отсутствие жидкости в полости 140 может быть обнаружено посредством анализа уровня сигналов 164, обнаруживаемых приемником 162 ультразвукового датчика 134, который может быть указан выходным сигналом 156. Ультразвуковые волны 164 проходят более эффективно через жидкость по сравнению с воздухом. Таким образом, когда сигналы 164 передаются через воздух, уровень сигналов 164 в приемнике 162 ниже по сравнению с тем, когда сигналы 164 передаются полностью через жидкость. Таким образом, отсутствие жидкости в полости 140 может быть обнаружено, когда уровень ультразвуковых сигналов 164, обнаруживаемый приемником 162 и указываемый выходным сигналом 156 ультразвукового датчика 134, соответствует или падает ниже порогового уровня, соответствующего отсутствию жидкости в полости 140. Таким образом, в некоторых вариантах осуществления, контроллер 122 сравнивает обнаруженный уровень сигналов 164, указываемых выходным сигналом 156, с пороговым уровнем, и обнаруживает отсутствие жидкости в полости 140, когда обнаруженный уровень соответствует или меньше порогового уровня.
[0043] Уведомление, выдаваемое контроллером 122, может указывать обнаруженное состояние потока 106 текучей среды или трубы 108. В некоторых вариантах осуществления уведомление включает в себя отображение информации 184 о состоянии, относящейся к обнаруженному состоянию, например, на дисплее 186 блока 116 управления, запуск тревожной сигнализации и/или предоставление другого типа уведомления. Информация 184 о состоянии может также храниться в памяти 124.
[0044] Хотя варианты осуществления настоящего изобретения было описано со ссылкой на предпочтительные варианты осуществления, специалисты в данной области техники признают, что изменения могут быть сделаны в форме и деталях без отступления от духа и области применения настоящего изобретения.
Варианты осуществления настоящего изобретения относятся к системам измерения расхода технологической текучей среды и, более конкретно, к двухсенсорному вихревому расходомеру, который обеспечивает измерение скорости потока текучей среды на основе одного или обоих датчиков. Вихревой расходомер включает в себя корпус, имеющий внутреннюю полость, вихреобразователь, поддерживаемый корпусом и протягивающийся во внутреннюю полость, ультразвуковой датчик, датчик изгибающего момента и контроллер. Ультразвуковой датчик конфигурируется, чтобы создавать выходной сигнал расхода ультразвукового датчика, который указывает расход потока текучей среды через внутреннюю полость. Датчик изгибающего момента конфигурируется, чтобы создавать выходной сигнал расхода датчика изгибающего момента, который указывает расход потока текучей среды через внутреннюю полость. Контроллер конфигурируется, чтобы формировать показатель измерения расхода, который указывает расход на основе выходного сигнала ультразвукового датчика расхода и/или выходного сигнала расхода датчика изгибающего момента. Технический результат – обеспечение возможности точного определения расхода при различных режимах течения среды. 2 н. и 18 з.п. ф-лы, 4 ил.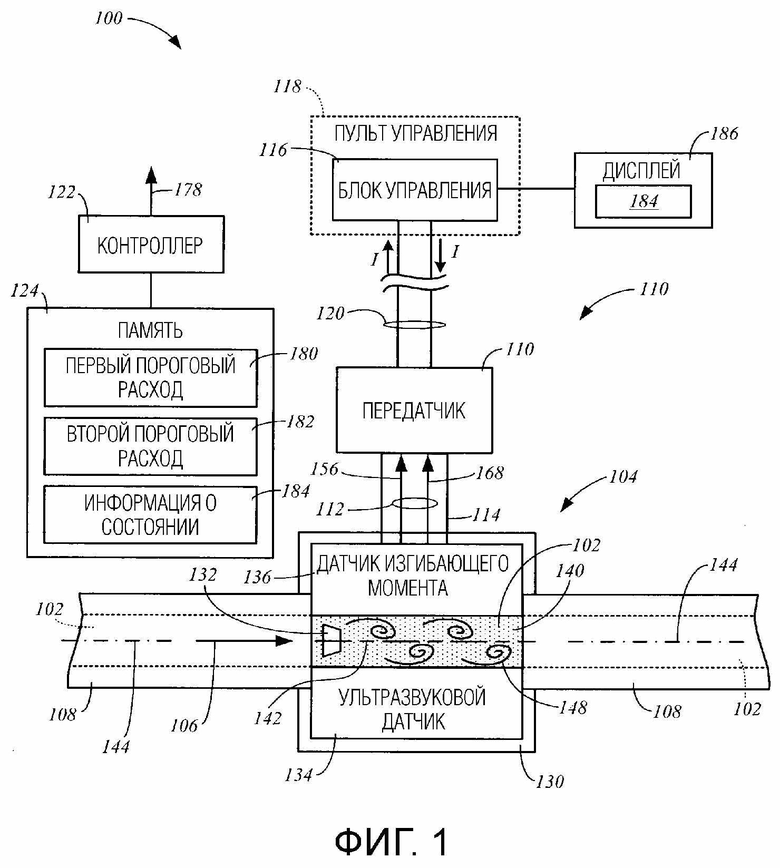
1. Вихревой расходомер, сконфигурированный, чтобы измерять расход потока текучей среды, содержащий:
корпус, включающий в себя внутреннюю полость, имеющую центральную ось;
вихреобразователь, поддерживаемый корпусом и проходящий во внутреннюю полость по первой оси, которая является наклонной к центральной оси;
ультразвуковой датчик, поддерживаемый корпусом на нижней по потоку стороне вихреобразователя и сконфигурированный, чтобы производить выходной сигнал расхода ультразвукового датчика, который указывает расход потока текучей среды через внутреннюю полость, причем ультразвуковой датчик включает в себя ультразвуковой излучатель и ультразвуковой приемник, которые позиционируются на противоположных сторонах внутренней полости;
датчик изгибающего момента, поддерживаемый корпусом на нижней по потоку стороне вихреобразователя и сконфигурированный, чтобы производить выходной сигнал расхода датчика изгибающего момента, который указывает расход потока текучей среды через внутреннюю полость, причем датчик изгибающего момента включает в себя балку, проходящую от стенки внутренней полости по первой оси; и
контроллер, сконфигурированный, чтобы формировать показатель измерения расхода, который указывает расход на основе выходного сигнала ультразвукового датчика расхода и/или выходного сигнала расхода датчика изгибающего момента.
2. Вихревой расходомер по п. 1, при этом плоскость, проходящая наклонно к центральной оси, проходит через балку, ультразвуковой излучатель и ультразвуковой приемник.
3. Вихревой расходомер по п. 2, при этом балка является смещенной от центральной оси.
4. Вихревой расходомер по п. 3, при этом вторая ось, которая является наклонной к первой оси и центральной оси, проходит через центральную ось, ультразвуковой излучатель и ультразвуковой приемник.
5. Вихревой расходомер по п. 1, при этом вихревой расходомер включает в себя режим слабого потока, когда расход меньше первого порогового расхода, при этом в режиме слабого расхода показатель измерения расхода формируется контроллером на основе выходного сигнала расхода ультразвукового датчика и не основывается на выходном сигнале расхода датчика изгибающего момента.
6. Вихревой расходомер по п. 5, при этом вихревой расходомер включает в себя режим среднего потока, когда расход находится между первым пороговым расходом и вторым пороговым расходом, который больше первого порогового расхода, при этом в режиме среднего расхода показатель измерения расхода формируется контроллером на основе выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
7. Вихревой расходомер по п. 6, при этом вихревой расходомер включает в себя режим сильного потока, когда расход больше второго порогового расхода, при этом в режиме сильного расхода показатель измерения расхода формируется контроллером на основе выходного сигнала расхода датчика изгибающего момента и не основывается на выходном сигнале расхода ультразвукового датчика.
8. Вихревой расходомер по п. 7, при этом первый пороговый расход меньше 30 м3/ч.
9. Вихревой расходомер по п. 8, при этом второй пороговый расход больше 80 м3/ч.
10. Вихревой расходомер по п. 1, при этом контроллер конфигурируется, чтобы:
сравнивать выходной сигнал расхода ультразвукового датчика с выходным сигналом расхода датчика изгибающего момента; и
обнаруживать состояние потока текучей среды или состояние трубы, содержащей поток текучей среды, на основе сравнения.
11. Вихревой расходомер по п. 10, при этом:
поток текучей среды является потоком жидкой текучей среды; и
контроллер обнаруживает состояние увлеченного газа для потока жидкой текучей среды на основе сравнения выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
12. Вихревой расходомер по п. 10, при этом:
поток текучей среды является потоком жидкой текучей среды; и
контроллер обнаруживает кавитацию в потоке текучей среды на основе сравнения выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
13. Вихревой расходомер по п. 10, при этом контроллер конфигурируется, чтобы обнаруживать состояние сильной вибрации в трубе, содержащей поток текучей среды, на основе сравнения выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
14. Способ измерения расхода потока текучей среды с помощью вихревого расходомера, содержащий этапы, на которых:
позиционируют вихреобразователь вихревого расходомера в потоке текучей среды;
когда расход меньше первого порогового расхода, выполняют измерение расхода в режиме слабого потока с помощью выходного сигнала расхода ультразвукового датчика, создаваемого ультразвуковым датчиком вихревого расходомера, размещенного ниже по потоку от вихреобразователя;
когда расход больше второго порогового расхода, который больше первого порогового расхода, выполняют измерение расхода в режиме сильного потока с помощью выходного сигнала расхода датчика изгибающего момента, создаваемого датчиком изгибающего момента вихревого расходомера, размещенного ниже по потоку от вихреобразователя; и
когда расход находится между первым и вторым пороговыми расходами, выполняют измерение расхода в режиме среднего потока с помощью выходного сигнала расхода ультразвукового датчика и выходного сигнала расхода датчика изгибающего момента.
15. Способ по п. 14, при этом первый пороговый расход меньше 30 м3/ч.
16. Способ по п. 15, при этом второй пороговый расход больше 80 м3/ч.
17. Способ по п. 14, дополнительно содержащий этапы, на которых:
сравнивают выходной сигнал расхода ультразвукового датчика с выходным сигналом расхода датчика изгибающего момента; и
обнаруживают состояние потока текучей среды или состояние трубы, содержащей поток текучей среды, на основе сравнения.
18. Способ по п. 17, при этом:
поток текучей среды является потоком жидкой текучей среды; и
обнаружение состояния потока текучей среды содержит этап, на котором обнаруживают газ, увлекаемый в потоке текучей среды.
19. Способ по п. 17, при этом:
поток текучей среды является потоком жидкой текучей среды; и
обнаружение состояния потока текучей среды содержит этап, на котором обнаруживают кавитацию в потоке текучей среды.
20. Способ по п. 17, при этом обнаружение состояния трубы содержит этап, на котором обнаруживают состояние сильной вибрации трубы или отсутствие жидкого состояния в трубе.
| CN 102183274 A, 14.09.2011 | |||
| US 20060217899 A1, 28.09.2006 | |||
| US 4565098 A, 21.01.1986 | |||
| ФОТОЭЛЕКТРИЧЕСКИЙ ПИРОМЕТР | 0 |
|
SU262436A1 |
| JP 2001082987 A, 30.03.2001 | |||
| US 4448081 A1, 15.05.1984. | |||
