ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] По данной заявке испрашивается приоритет на основании заявки на патент Китая 201910343628.4, поданной 26 апреля 2019 года и включенной в настоящий документ посредством ссылки во всей своей полноте.
ОБЛАСТЬ ТЕХНИКИ
[0002] Варианты осуществления данного изобретения относятся к области технологий связи и, в частности, к способу получения параметров и оконечному устройству.
ИСХОДНЫЕ ДАННЫЕ
[0003] С развитием сенсорных технологий камеры некоторых электронных приборов могут использовать датчик расстояния для измерения расстояния до сфокусированного объекта с целью достижения более точной фокусировки. Например, в настоящее время популярным решением является использование технологии времени полета (TimeofFlight, ToF) для измерения расстояния по прямой между объектом в фокусе и камерой, которое является расстоянием сфокусированного объекта.
[0004] Несмотря на то, что датчики расстояния, основанные на таких технологиях, как ToF, имеют относительно высокую точность определения дальности, они плохо адаптируются к окружающей среде. Точность измерения дальности датчиков расстояния необходимо калибровать не только перед тем, как электронный прибор покидает завод, но также после ремонта или использования электронного прибора в течение определенного периода времени. Однако калибровка датчика расстояния является высокопрофессиональной задачей, которая требует строгих требований к навыкам оператора, калибровочному устройству и среде калибровки. Следовательно, это делает калибровку датчика расстояния относительно сложной.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Варианты осуществления данного изобретения представляют способ получения параметров и оконечное устройство для решения проблемы, заключающейся в том, что калибровка датчика расстояния является относительно сложной.
[0006] Согласно первому аспекту вариант осуществления данного изобретения представляет способ получения параметров, применяемый к оконечному устройству, где способ включает в себя:
получение изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки;
получение первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение;
получение расстояния калибровки между целевым объектом и оконечным устройством; и
получение смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
[0007] Согласно второму аспекту вариант осуществления данного изобретения представляет оконечное устройство, включая:
первый модуль получения, сконфигурированный для получения изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки;
второй модуль получения, сконфигурированный для получения первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение;
третий модуль получения, сконфигурированный для получения расстояния калибровки между целевым объектом и оконечным устройством; и
четвертый модуль получения, сконфигурированный для получения смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
[0008] Согласно третьему аспекту вариант осуществления данного изобретения дополнительно представляет оконечное устройство, включая память, процессор и компьютерную программу, хранящуюся в памяти и способную работать на процессоре. Когда компьютерная программа выполняется процессором, реализуются этапы способа получения параметров.
[0009] Согласно четвертому аспекту вариант осуществления данного изобретения дополнительно представляет машиночитаемый носитель данных, где машиночитаемый носитель данных хранит компьютерную программу, и когда компьютерная программа выполняется процессором, реализуются этапы способа получения параметров.
[0010] В вариантах осуществления данного изобретения выполняется сопоставление между изображением предварительного просмотра целевого объекта и областью калибровки на экране предварительного просмотра съемки, в это время получается значение измерения датчика расстояния, а затем значение измерения и расстояние калибровки используется для получения смещения калибровки, соответствующего целевому объекту. Следовательно, согласно вариантам осуществления данного изобретения, пользователь может использовать любой целевой объект и получить его смещение калибровки, и способ получения простой, тем самым уменьшается сложность калибровки датчика расстояния.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] ФИГ. 1 представляет собой структурную схему способа получения параметров согласно варианту осуществления данного изобретения;
[0012] ФИГ. 2 представляет собой первую структурную схему оконечного устройства согласно варианту осуществления данного изобретения;
[0013] ФИГ. 3 представляет собой первую структурную схему метода калибровки согласно варианту осуществления данного изобретения;
[0014] ФИГ. 4 показывает первый интерфейс дисплея оконечного устройства согласно варианту осуществления данного изобретения;
[0015] ФИГ. 5 представляет собой вторую структурную схему метода калибровки согласно варианту осуществления данного изобретения;
[0016] ФИГ. 6 показывает второй интерфейс оконечного устройства согласно варианту осуществления данного изобретения;
[0017] ФИГ. 7 показывает третий интерфейс дисплея оконечного устройства согласно варианту осуществления данного изобретения;
[0018] ФИГ. 8 представляет собой вторую структурную схему оконечного устройства согласно варианту осуществления данного изобретения; и
[0019] ФИГ. 9 представляет собой третью структурную схему оконечного устройства согласно варианту осуществления данного изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0020] Нижеследующее ясно и полностью описывает технические решения в вариантах осуществления данного изобретения со ссылкой на сопроводительные чертежи в вариантах осуществления данного изобретения. Очевидно, описанные варианты осуществления являются просто частью, а не всеми вариантами осуществления данного изобретения. Все другие варианты осуществления, которые специалист в данной области техники получает без творческих усилий на основе вариантов осуществления данного изобретения, должны подпадать под объем защиты настоящего изобретения.
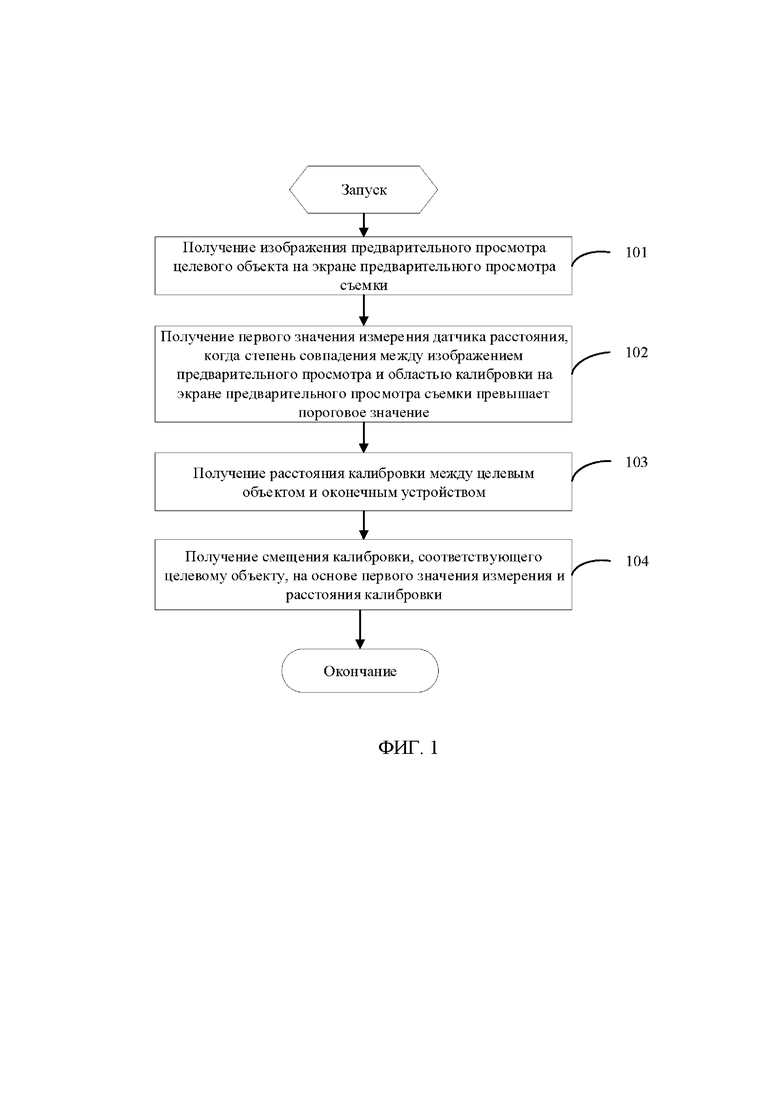
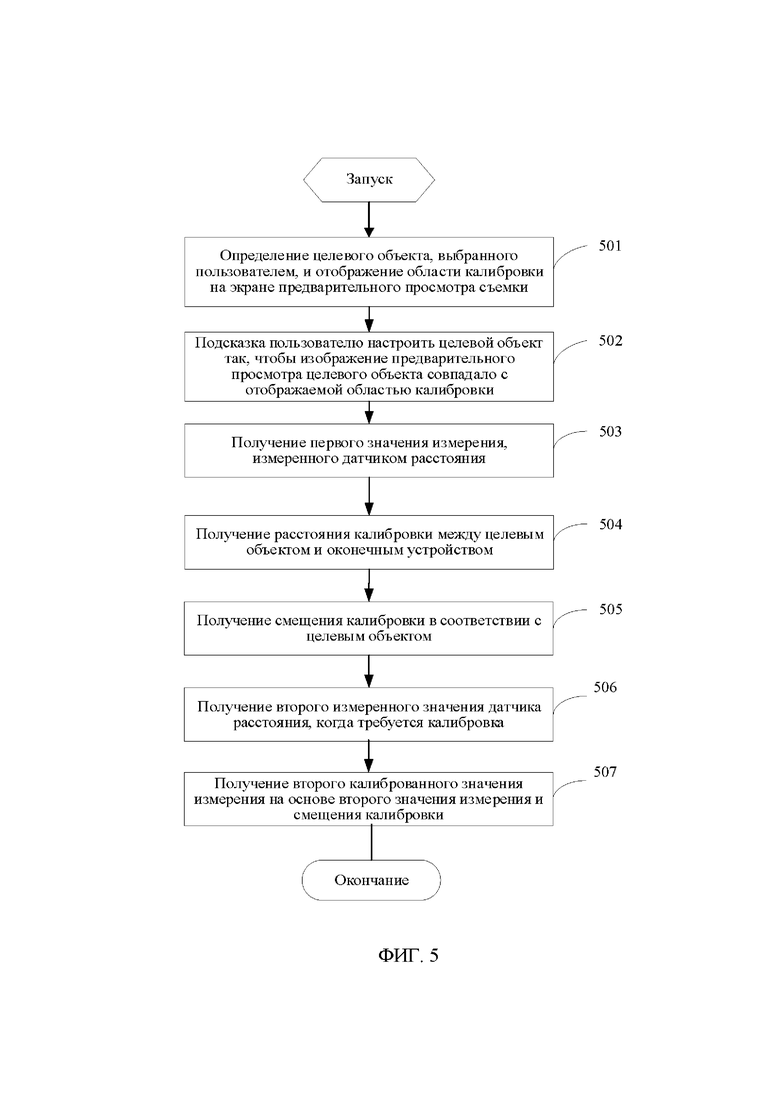
[0021] Ссылаясь на ФИГ. 1, ФИГ. 1 представляет собой структурную схему способа получения параметров согласно варианту осуществления данного изобретения. Как показано на ФИГ. 1, включены следующие этапы.
[0022] Этап 101: Получение изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки.
[0023] Когда включена функция камеры, оконечное устройство отображает экран предварительного просмотра съемки. В это время камера может использоваться для получения изображения целевого объекта на экране предварительного просмотра съемки, и изображение упоминается в данном документе как изображение предварительного просмотра целевого объекта. Изображение предварительного просмотра может включать в себя целевой объект и может дополнительно включать в себя контент, такой как окружение целевого объекта. Целевым объектом может быть объект, человек и т.п.
[0024] Дополнительно в данном варианте осуществления данного изобретения можно предварительно установить, какой тип объекта является целевым объектом. Затем, когда пользователь использует объект для калибровки, сначала может быть определено, является ли объект, используемый пользователем, заранее определенным целевым объектом. Если объект, используемый пользователем, является заранее определенным целевым объектом, выполняется этап 101. В противном случае процесс может быть завершен, или пользователю может быть предложена подсказка.
[0025] Этап 102: Получение первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение.
[0026] Датчик расстояния на основе технологии ToF, взят в качестве примера для краткого описания принципа измерения дальности. Датчик расстояния на основе ToF обычно включает в себя излучающий блок и приемный блок. Лазерный луч, излучаемый излучающим блоком, отражается обратно после попадания на целевой объект, и отраженный световой луч принимается приемным блоком. В этом случае можно измерить время пролета между излучением и приемом лазерного луча. Затем расстояние, а именно первое значение измерения, между оконечным устройством (или датчиком расстояния) и целевым объектом может вычисляться на основе скорости распространения света.
[0027] На данном этапе порог может устанавливаться на любое значение. Для повышения точности калибровки порог может устанавливаться на 100%. Тогда, в этом случае, изображение предварительного просмотра совпадает с областью калибровки на экране предварительного просмотра съемки.
[0028] Область калибровки может быть областью любой формы. Например, область калибровки может быть прямоугольной, круглой и т.п. Например, область калибровки может устанавливаться на любую форму и размер для соответствия форме и размеру конкретного целевого объекта.
[0029] Этап 103: Получение расстояния калибровки между целевым объектом и оконечным устройством.
[0030] Относительно целевого объекта его размер известен или может быть получен путем измерения. Для объекта фиксированного размера, когда объект приближается к камере, объект имеет больший размер изображения на экране дисплея, и наоборот.
[0031] В зависимости от размера целевого объекта на экране дисплея может отображаться геометрическая фигура, соответствующая его контуру изображения. Размер и измерения геометрической фигуры фиксированы и также являются известными условиями. Когда изображение целевого объекта совпадает с геометрической фигурой, можно считать, что их размеры совпадают. В этом случае истинное расстояние между целевым объектом и датчиком расстояния может получаться на основе экспериментальных данных, а истинное расстояние является расстоянием калибровки.
[0032] В практических применениях может храниться соответствие, которое является соответствием между объектами и расстояниями калибровки между объектами и оконечным устройством. Затем на этом этапе целевой объект может быть идентифицирован, и затем на основе соответствия между объектами и расстояниями калибровки получается расстояние калибровки между целевым объектом и оконечным устройством. Способ идентификации целевого объекта здесь не ограничивается.
[0033] Этап 104: Получение смещения калибровки, соответствующего целевому объекту на основе первого значения измерения и расстояния калибровки.
[0034] Здесь разница между первым значением измерения и расстоянием калибровки используется в качестве смещения калибровки, соответствующего целевому объекту.
[0035] В данном варианте осуществления данного изобретения вышеупомянутый способ может применяться к оконечному устройству, например: мобильному телефону, планшетному персональному компьютеру (Tablet Personal Computer), портативному компьютеру (Laptop Computer), персональному цифровому помощнику (personal digital assistant, PDA), мобильному интернет-устройству (MobileInternetDevice, MID) или носимому устройству (WearableDevice).
[0036] В данном варианте осуществления данного изобретения выполняется сопоставление между изображением предварительного просмотра целевого объекта и областью калибровки на экране предварительного просмотра съемки, в это время получается значение измерения датчика расстояния, а затем значение измерения и расстояние калибровки используется для получения смещения калибровки, соответствующего целевому объекту. Следовательно, согласно вариантам осуществления данного изобретения, пользователь может использовать любой целевой объект и получить его смещение калибровки, и способ получения простой, тем самым уменьшается сложность калибровки датчика расстояния.
[0037] На основе вышеизложенного варианта осуществления после этапа 104 способ может дополнительно включать в себя: получение второго значения измерения датчика расстояния; и получение калиброванного второго значения измерения на основе второго значения измерения и смещения калибровки. В частности, разница между вторым значением измерения и смещением калибровки используется в качестве калиброванного второго значения измерения. Таким образом, расчет простой, и поэтому калибровочные работы могут быстро выполняться.
[0038] На основе вышеизложенного варианта осуществления перед этапом 101 способ может дополнительно включать в себя: идентификацию целевого объекта; и отображение на экране предварительного просмотра съемки области калибровки, которая соответствует форме целевого объекта. В частности, целевой объект может быть идентифицирован, и область калибровки, которая соответствует форме целевого объекта, отображается на экране предварительного просмотра съемки. Например, может быть сохранено соответствие между объектом и областью калибровки. После того, как объект идентифицирован, его соответствующая область калибровки может получаться согласно соответствию и затем отображаться. При этом не требуется заранее определять целевой объект, что облегчает калибровку. Например, когда целевой объект идентифицируется как монета, область калибровки, которая соответствует форме (например, кругу) монеты, может отображаться на экране предварительного просмотра съемки.
[0039] На основе вышеизложенного варианта осуществления после этапа 101 может выполняться как минимум один из следующих этапов:
[0040] Отображается первая подсказка, причем первая подсказка используется для подсказки пользователю переместить целевой объект так, чтобы изображение предварительного просмотра совпадало с областью калибровки. Таким образом, можно сократить время, необходимое для калибровки, и повысить эффективность калибровки.
[0041] Отображается вторая подсказка, где информация второй подсказки используется для подсказки пользователю выбрать целевой объект с предварительно заданными характеФИГтиками. Предварительно заданные характеФИГтики могут быть характеФИГтиками формы, характеФИГтиками типа и т.п. Таким образом, пользователь может выбрать целевой объект быстрее, тем самым сокращая время, необходимое для калибровки, и повышая эффективность калибровки.
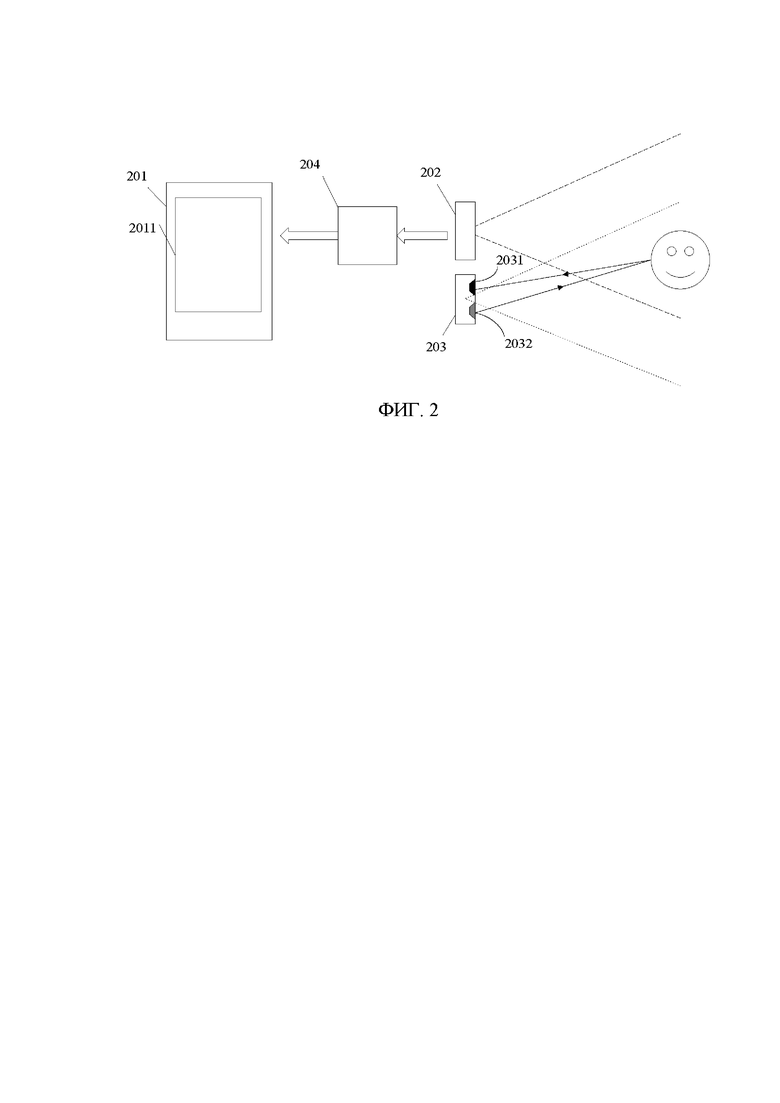
[0042] Как показано на ФИГ. 2, оконечное устройство в данном варианте осуществления данного изобретения может включать в себя: дисплей 201, модуль камеры 202, датчик расстояния 203 и процессор 204. Датчик расстояния 203 может включать в себя приемный блок 2031 и излучающий блок 2032. А на дисплее отображается экран предварительного просмотра съемки 2011.
[0043] Датчик расстояния на основе технологии ToF, взят в качестве примера для краткого описания принципа измерения дальности. Лазерный луч, излучаемый излучающим блоком, отражается обратно после попадания на целевой объект, и отраженный световой луч принимается приемным блоком. В этом случае можно измерить время пролета между излучением и приемом лазерного луча. Затем расстояние между оконечным устройством (или датчиком расстояния) и целевым объектом может рассчитываться на основе скорости распространения света.
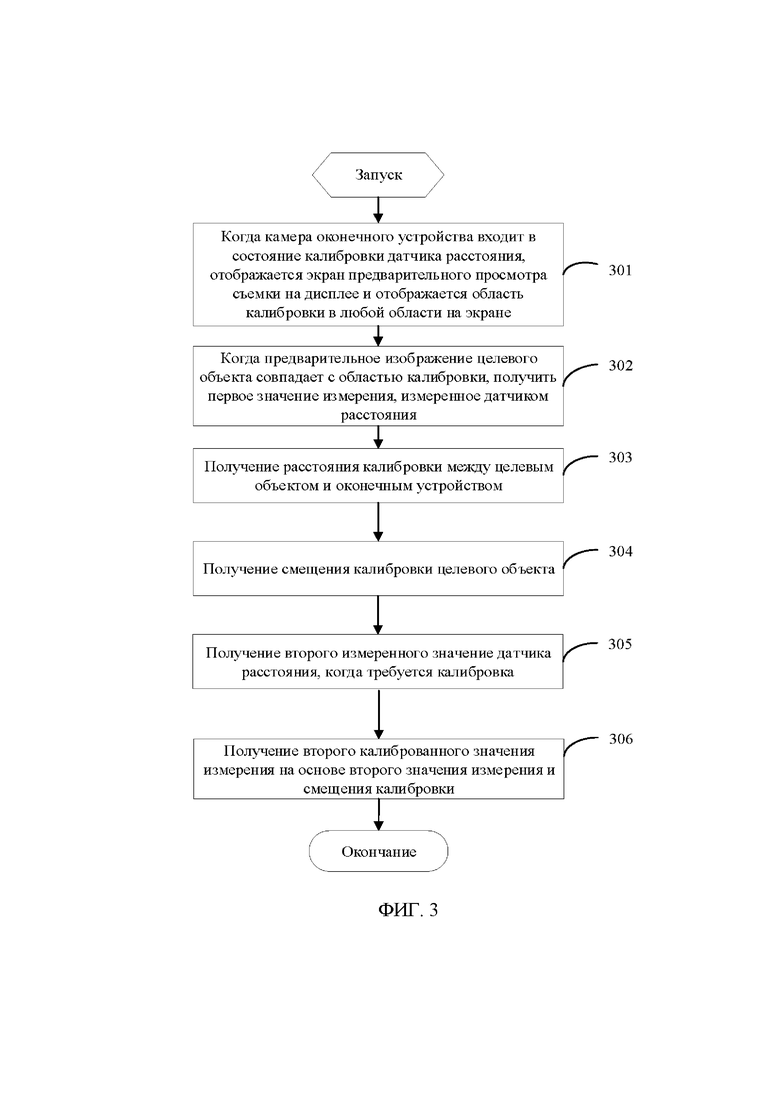
[0044] Ссылаясь на ФИГ. 3, ФИГ. 3 представляет собой структурную схему способа калибровки согласно варианту осуществления данного изобретения. Способ может применяться к оконечному устройству. В данном варианте заранее заданы форма области калибровки и целевой объект. Например, целевой объект представляет собой круглый объект размером с монету в 1 юань. Соответственно, форма области калибровки круглая. Как показано на ФИГ. 3, способ включает следующие этапы.
[0045] Этап 301: Когда камера оконечного устройства входит в состояние калибровки датчика расстояния, отображается экран предварительного просмотра съемки на дисплее и отображается область калибровки в любой области на экране.
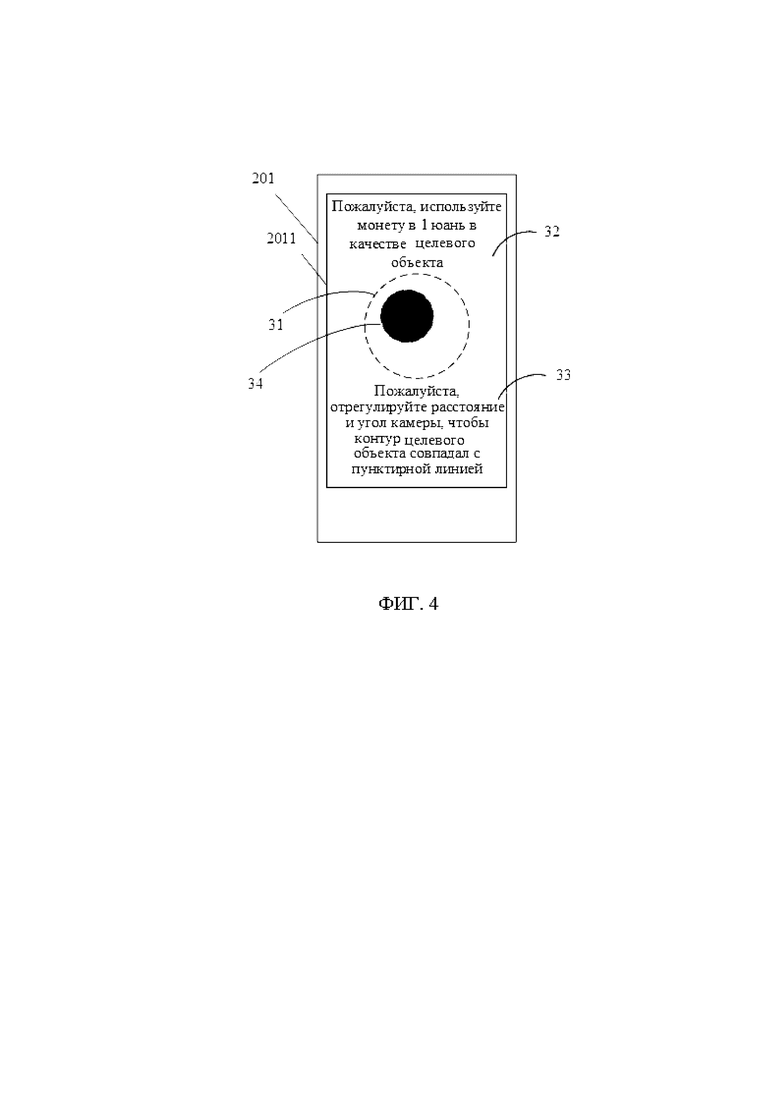
[0046] В данном варианте осуществления данного изобретения как минимум одна предварительно установленная геометрическая фигура 31 (круг в данном варианте осуществления) отображается на экране предварительного просмотра съемки 2011. В данном случае схематическая диаграмма экрана оконечного устройства показана на ФИГ. 4.
[0047] Дополнительно чтобы помочь пользователю понять соответствие целевого объекта геометрической фигуре, информация подсказки 32 может отображаться на дисплее. Например, как показано на ФИГ. 4. может отображаться «Пожалуйста, используйте монету в 1 юань в качестве целевого объекта».
[0048] Этап 302: Когда изображение предварительного просмотра целевого объекта совпадает с областью калибровки, получается первое значение измерения, измеренное датчиком расстояния.
[0049] В данном процессе, когда изображение предварительного просмотра объекта появляется на экране предварительного просмотра съемки, сначала может быть идентифицировано, является ли появляющийся объект заданным целевым объектом. Если объект является заданным целевым объектом, выполняется этап 302; в противном случае пользователю предлагается использовать соответствующий объект в качестве целевого объекта или использовать объект, имеющий форму, аналогичную целевому объекту.
[0050] Пользователь может действовать для совпадения изображения целевого объекта 34 с геометрической фигурой. Дополнительно, чтобы направлять пользователя к действию, на дисплее может отображаться подсказка 33. Например, как показано на ФИГ. 4: «Пожалуйста, отрегулируйте расстояние и угол наклона камеры, чтобы контур целевого объекта совпадал с пунктирной рамкой». Когда целевой объект совпадает с областью калибровки, получается первое значение измерения D1, измеренное датчиком расстояния.
[0051] Этап 303: Получение расстояния калибровки между целевым объектом и оконечным устройством.
[0052] В данном варианте осуществления данного изобретения смещение калибровки целевого объекта также может определяться с помощью экспериментов. Размер и измерения заданного целевого объекта (например, монеты в 1 юань) одинаковы. Для целевого объекта фиксированного размера, когда целевой объект находится ближе к камере, целевой объект имеет больший размер изображения на дисплее, и наоборот. Заданная геометрическая фигура используется в качестве контура изображения, соответствующего целевому объекту, а ее размер и измерения фиксированы и являются известными условиями. Следовательно, когда изображение целевого объекта совпадает с геометрической фигурой, можно считать, что их размеры совпадают. В таком случае истинное расстояние между целевым объектом и датчиком расстояния может получаться на основе экспериментальных данных. Это истинное расстояние является расстоянием калибровки D0, предварительно установленным системой для целевого объекта.
[0053] Этап 304: Получение смещения калибровки целевого объекта.
[0054] Здесь Doffset = D1-D0 может использоваться в качестве смещения калибровки. Смещение калибровки можно сохранить и использовать для последующей калибровки.
[0055] Этап 305: Получение второго измеренного значения датчика расстояния, когда требуется калибровка.
[0056] Когда требуется калибровка, и пользователь использует монету в 1 юань в качестве эталонного объекта, получается второе значение измерения D2 датчика расстояния.
[0057] Этап 306: Получение второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
[0058] Второе значение измерения калибруется с помощью смещения калибровки. Здесь D2 - Doffset, а именно разница между вторым значением измерения и смещением калибровки, является вторым калиброванным значением измерения.
[0059] Ссылаясь на ФИГ. 5, ФИГ. 5 представляет собой структурную схему способа калибровки согласно варианту осуществления данного изобретения. Способ может применяться к оконечному устройству. Отличие от варианта осуществления, показанного на ФИГ. 3 состоит в том, что в данном варианте осуществления данного изобретения индивидуальный целевой объект больше не установлен предварительно, но целевой объект, выбранный пользователем, может быть идентифицирован, и соответствующая область калибровки (например, геометрическая фигура) отображается на экране дисплея на основе результата идентификации. Как показано на ФИГ. 5, способ включает следующие этапы.
[0060] Этап 501: Идентификация целевого объекта, выбранного пользователем, и отображение области калибровки на экране предварительного просмотра съемки.
[0061] Когда камера направлена на целевой объект, выбранный пользователем, целевой объект входит в диапазон поля зрения камеры. Оконечное устройство может различать на основе характеристик изображения целевого объекта, к какому типу принадлежит целевой объект, а затем отображать геометрическую фигуру, соответствующую целевому объекту, на экране предварительного просмотра.
[0062] Как показано на ФИГ. 6, пользователю могут предлагаться целевые объекты для использования. Когда выбранный пользователем целевой объект представляет собой монету в 1 юань, геометрическая фигура, отображаемая на экране предварительного просмотра съемки, представляет собой круг; и когда целевой объект является удостоверением личности жителя, геометрическая фигура, отображаемая на экране предварительного просмотра съемки, представляет собой прямоугольник.
[0063] Этап 502: Предложение пользователю настроить целевой объект так, чтобы изображение предварительного просмотра целевого объекта совпадало с отображаемой областью калибровки.
[0064] Этап 503: Получение первого значения измерения D1, измеренного датчиком расстояния.
[0065] Этап 504: Получение расстояния калибровки между целевым объектом и оконечным устройством.
[0066] В данном варианте осуществления данного изобретения смещение калибровки целевого объекта также может определяться с помощью экспериментов. Размер и измерения заданного целевого объекта (например, монеты в 1 юань) одинаковы. Для целевого объекта фиксированного размера, когда целевой объект находится ближе к камере, целевой объект имеет больший размер изображения на дисплее, и наоборот. Заданная геометрическая фигура используется в качестве контура изображения, соответствующего целевому объекту, а ее размер и измерения фиксированы и являются известными условиями. Следовательно, когда изображение целевого объекта совпадает с геометрической фигурой 1, можно считать, что их размеры совпадают. В таком случае истинное расстояние между целевым объектом и датчиком расстояния может получаться на основе экспериментальных данных. Это истинное расстояние является расстоянием калибровки D0, предварительно установленным системой для целевого объекта.
[0067] Этап 505: Получение смещения калибровки в соответствии с целевым объектом.
[0068] Здесь Doffset = D1-D0 может использоваться в качестве смещения калибровки. Смещение калибровки может быть сохранено для использования в последующей калибровке.
[0069] Этап 506: Получение второго измеренного значения датчика расстояния, когда требуется калибровка.
[0070] Когда требуется калибровка, и, например, пользователь использует монету в 1 юань в качестве эталонного объекта, получается второе значение измерения D2 датчика расстояния.
[0071] Этап 507: Получение второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
[0072] Второе значение измерения калибруется с помощью смещения калибровки. Здесь D2 - Doffset, а именно разница между вторым значением измерения и смещением калибровки, является вторым калиброванным значением измерения.
[0073] Из вышеприведенного описания можно понять, что в данном варианте осуществления данного изобретения датчик расстояния может быть откалиброван в соответствии с эталонным объектом, выбранным пользователем, тем самым упрощая сложность калибровки, облегчая работу пользователя и улучшая пользовательский опыт.
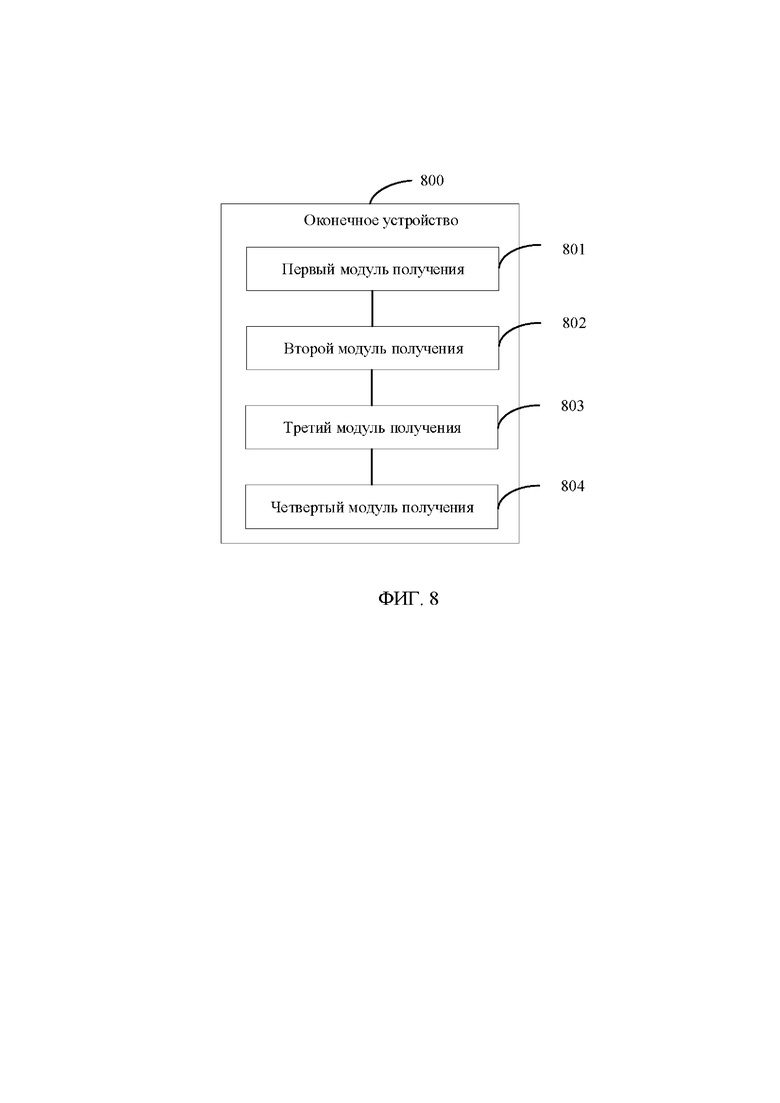
[0074] Ссылаясь на ФИГ. 8, ФИГ. 8 представляет собой структурную схему оконечного устройства согласно варианту осуществления данного изобретения. Как показано на ФИГ. 8, оконечное устройство 800 включает в себя:
первый модуль получения 801, сконфигурированный для получения изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки; второй модуль получения 802, сконфигурированный для получения первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение; третий модуль получения 803, сконфигурированный для получения расстояния калибровки между целевым объектом и оконечным устройством; и четвертый модуль получения 804, сконфигурированный для получения смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
[0075] Дополнительно четвертый модуль получения 804 специально сконфигурирован для использования разницы между первым значением измерения и расстоянием калибровки в качестве смещения калибровки.
[0076] Дополнительно третий модуль получения 803 включает в себя: подмодуль идентификации, сконфигурированный для идентификации целевого объекта; и подмодуль получения, сконфигурированный для получения расстояния калибровки между целевым объектом и оконечным устройством на основе соответствия между объектами и расстояниями калибровки.
[0077] Дополнительно оконечное устройство дополнительно включает в себя:
пятый модуль получения 805, сконфигурированный для получения второго значения измерения датчика расстояния; и
модуль калибровки 806, сконфигурированный для получения второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
[0078] Дополнительно модуль калибровки 806 специально сконфигурирован для использования разницы между вторым значением измерения и смещением калибровки в качестве второго калиброванного значения измерения.
[0079] Дополнительно оконечное устройство дополнительно включает в себя:
модуль идентификации 807, сконфигурированный для идентификации целевого объекта; и
первый модуль отображения 808, сконфигурированный для отображения на экране предварительного просмотра съемки области калибровки, которая соответствует форме целевого объекта.
[0080] Дополнительно оконечное устройство включает в себя как минимум один из следующих модулей:
второй модуль отображения 809, сконфигурированный для отображения первой информации с подсказкой, где первая информация с подсказкой используется для подсказки пользователю переместить целевой объект так, чтобы изображение предварительного просмотра совпадало с областью калибровки; и
третий модуль отображения 810, сконфигурированный для отображения второй информации с подсказкой, где вторая информация с подсказкой используется для подсказки пользователю выбрать целевой объект с предварительно заданными характеФИГтиками.
[0081] Оконечное устройство 800 может реализовывать процессы, реализованные оконечным устройством в вышеупомянутых вариантах осуществления способа. Во избежание повторения, подробности здесь снова не описываются.
[0082] В данном варианте осуществления данного изобретения выполняется сопоставление между изображением предварительного просмотра целевого объекта и областью калибровки на экране предварительного просмотра съемки, в это время получается значение измерения датчика расстояния, а затем значение измерения и расстояние калибровки используется для получения смещения калибровки, соответствующего целевому объекту. Следовательно, согласно вариантам осуществления данного изобретения, пользователь может использовать любой целевой объект и получить его смещение калибровки, и способ получения простой, тем самым уменьшается сложность калибровки датчика расстояния.
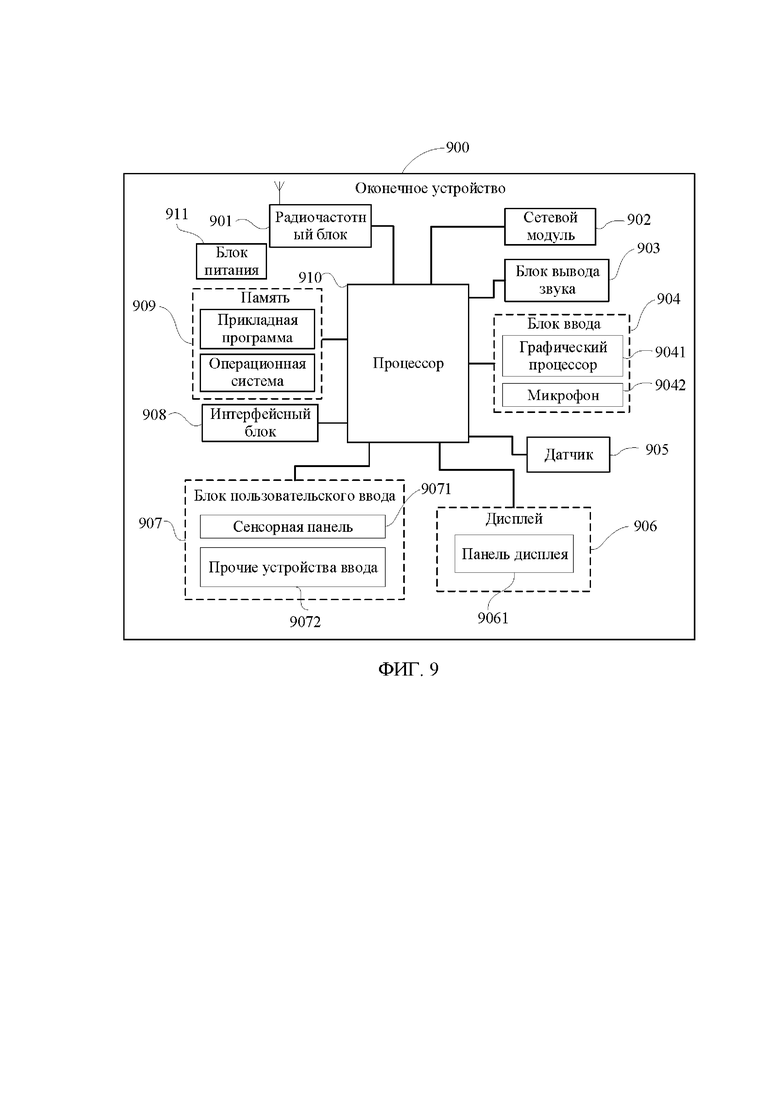
[0083] ФИГ. 9 представляет собой схематическую диаграмму аппаратной структуры оконечного устройства, реализующего варианты осуществления данного изобретения. Оконечное устройство 900 включает в себя, помимо прочего: радиочастотный блок 901, сетевой модуль 902, блок вывода звука 903, блок ввода 904, датчик 905, блок отображения 906, блок пользовательского ввода 907, интерфейсный блок 908, память 909, процессор 910, источник питания 911 и другие компоненты. Специалист в данной области техники может понять, что структура оконечного устройства, показанного на ФИГ. 9 не является ограничением для оконечного устройства, и оконечное устройство может включать в себя больше или меньше компонентов, чем показано на чертеже, или объединять некоторые компоненты, или иметь различную компоновку компонентов. В данном варианте осуществления данного изобретения оконечное устройство включает в себя, помимо прочего, мобильный телефон, планшетный компьютер, портативный компьютер, карманный компьютер, мобильный терминал, установленный на транспортном средстве, носимое устройство, шагомер и т.п.
[0084] Процессор 910 сконфигурирован для: получения изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки; получения первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение; получения расстояния калибровки между целевым объектом и оконечным устройством; и получения смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
[0085] В данном варианте осуществления данного изобретения выполняется сопоставление между изображением предварительного просмотра целевого объекта и областью калибровки на экране предварительного просмотра съемки, в это время получается значение измерения датчика расстояния, а затем значение измерения и расстояние калибровки используется для получения смещения калибровки, соответствующего целевому объекту. Следовательно, согласно вариантам осуществления данного изобретения, пользователь может использовать любой целевой объект и получить его смещение калибровки, и способ получения простой, тем самым уменьшается сложность калибровки датчика расстояния.
[0086] Дополнительно процессор 910 сконфигурирован для использования разницы между первым значением измерения и расстоянием калибровки в качестве смещения калибровки.
[0087] Дополнительно процессор 910 сконфигурирован для получения второго значения измерения датчика расстояния; и получения второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
[0088] Дополнительно процессор 910 сконфигурирован для использования разницы между вторым значением измерения и смещением калибровки в качестве второго калиброванного значения измерения.
[0089] Дополнительно процессор 910 сконфигурирован для идентификации целевого объекта; и получения расстояния калибровки между целевым объектом и оконечным устройством на основе соответствия между объектами и расстояниями калибровки.
[0090] Дополнительно процессор 910 сконфигурирован для идентификации целевого объекта; и отображения на экране предварительного просмотра съемки области калибровки, которая соответствует форме целевого объекта.
[0091] Дополнительно процессор 910 сконфигурирован для выполнения как минимум одного из следующих этапов:
отображение первой подсказки, где первая подсказка используется для подсказки пользователю переместить целевой объект так, чтобы изображение предварительного просмотра совпадало с областью калибровки; и
отображение второй подсказки, где вторая подсказка используется для подсказки пользователю выбрать целевой объект с предустановленными характеристиками.
[0092] Следует понимать, что в вариантах осуществления данного изобретения радиочастотный блок 901 может быть сконфигурирован для приема и передачи информации или приема и передачи сигнала в процессе вызова. В частности, радиочастотный блок 901 принимает данные нисходящей линии связи от базовой станции и передает данные нисходящей линии связи в процессор 910 для обработки; и передает данные восходящей линии связи на базовую станцию. Обычно радиочастотный блок 901 включает в себя, но не ограничивается этим, антенну, как минимум один усилитель, приемопередатчик, ответвитель, малошумящий усилитель, дуплексор и т.п. Кроме того, радиочастотный блок 901 может дополнительно связываться с сетью и другими устройствами через систему беспроводной связи.
[0093] Оконечное устройство предоставляет пользователю беспроводной широкополосный доступ в Интернет с помощью сетевого модуля 902, например, помогая пользователю передавать и получать электронные письма, просматривать веб-страницы и получать доступ к потоковому мультимедиа.
[0094] Блок вывода звука 903 может преобразовывать аудиоданные, принятые радиочастотным модулем 901 или сетевым модулем 902 или сохраненные в памяти 909, в аудиосигнал и выводить аудиосигнал в звук. Кроме того, блок вывода звука 903 может дополнительно обеспечивать вывод звука (например, звук приема сигнала вызова или звук приема сообщения), относящийся к конкретной функции, выполняемой оконечным устройством 900. Блок вывода звука 903 включает в себя динамик, зуммер, телефонную трубку и т.п.
[0095] Блок ввода 904 сконфигурирован для приема звукового или видеосигнала. Блок ввода 904 может включать в себя блок обработки графики 9041 (Graphics Processing Unit, GPU) и микрофон 9042. Блок обработки графики 9041 обрабатывает данные изображения статического изображения или видео, полученные устройством захвата изображения (например, камерой) в режиме захвата видео или в режиме захвата изображения. Обработанный кадр изображения может отображаться на блоке отображения 906. Кадр изображения, обработанный блоком обработки графики 9041, может сохраняться в памяти 909 (или другом носителе данных) или передаваться через радиочастотный блок 901 или сетевой модуль 902. Микрофон 9042 может принимать звук и преобразовывать такой звук в аудиоданные. Обработанные аудиоданные могут быть преобразованы в режиме телефонного вызова в формат, который может передаваться радиочастотным блоком 901 на базовую станцию мобильной связи для вывода.
[0096] Оконечное устройство 900 дополнительно включает в себя как минимум один датчик 905, например оптический датчик, датчик движения и другой датчик. В частности, оптический датчик включает в себя датчик внешней освещенности и датчик приближения, где датчик внешней освещенности может регулировать яркость панели отображения 9061 в зависимости от интенсивности окружающего света, а датчик приближения может выключать панель дисплея 9061 и/или подсветку, когда оконечное устройство 900 приближается к уху. В качестве типа датчика движения датчик акселерометра может обнаруживать величины ускорений во всех направлениях (обычно по трем осям), может определять величину и направление силы тяжести, когда оконечное устройство находится в статическом состоянии, и и может применяться для распознавания положения оконечного устройства (например, переключение экрана между портретной и альбомной ориентацией, связанных игр и калибровки положения магнитометра), функций, связанных с распознаванием вибрации (например, шагомер и касание) и т.п. Датчик 905 может дополнительно включать в себя датчик отпечатков пальцев, датчик давления, датчик радужной оболочки, молекулярный датчик, гироскоп, барометр, гигрометр, термометр, инфракрасный датчик и т.п. Подробности здесь не описаны.
[0097] Блок отображения 906 сконфигурирован для отображения информации, введенной пользователем, или информации, предоставленной пользователю. Блок отображения 906 может включать в себя панель дисплея 9061, и панель дисплея 9061 может быть сконфигурирована в форме жидкокристаллического дисплея (Liquid Crystal Display, LCD), органического светоизлучающего диода (Organic Light-Emitting Diode, OLED) или тому подобное.
[0098] Блок пользовательского ввода 907 может быть сконфигурирован для приема введенной информации о цифрах или символах и генерирования входного сигнала ключа, который связан с пользовательскими настройками и управлением функциями оконечного устройства. В частности, блок пользовательского ввода 907 включает в себя сенсорную панель 9071 и другие устройства ввода 9072. Сенсорная панель 9071 также называется сенсорным экраном и может собирать операции касания, выполненные пользователем на сенсорной панели 9071 или рядом с ней (например, операция, выполняемая пользователем на сенсорной панели 9071 или рядом с сенсорной панелью 9071 с использованием любого подходящего предмета или аксессуара, такого как палец или стилус). Сенсорная панель 9071 может включать в себя две части: сенсорное устройство обнаружения и сенсорный контроллер. Сенсорное устройство обнаружения определяет положение касания пользователя, обнаруживает сигнал, вызванный операцией касания, и отправляет сигнал на сенсорный контроллер. Сенсорный контроллер принимает информацию касания от сенсорного устройства обнаружения, преобразует информацию касания в координаты точки касания и отправляет координаты точки касания в процессор 910 и может принимать и выполнять команду, отправленную процессором 910. Кроме того, сенсорная панель 9071 может использоваться в различных типах, таких как резистивные, емкостные, инфракрасные и поверхностные акустические волны. Блок пользовательского ввода 907 может дополнительно включать в себя другие устройства ввода 9072 в дополнение к сенсорной панели 9071. В частности, другие устройства ввода 9072 могут включать в себя, помимо прочего, физическую клавиатуру, функциональную кнопку (такую как кнопку регулировки громкости или кнопку включения/выключения питания), трекбол, мышь и джойстик. Подробности здесь не описаны.
[0099] Кроме того, сенсорная панель 9071 может закрывать панель отображения 9061. После обнаружения операции касания на сенсорной панели 9071 или рядом с ней сенсорная панель 9071 передает операцию касания процессору 910 для определения типа события касания. Затем процессор 910 обеспечивает соответствующий визуальный вывод на панели отображения 9061 в зависимости от типа события касания. Несмотря на то, что на ФИГ. 9, сенсорная панель 9071 и панель дисплея 9061 действуют как два независимых компонента для реализации функций ввода и вывода оконечного устройства, в некоторых вариантах осуществления сенсорная панель 9071 и панель дисплея 9061 могут быть объединены для реализации функций ввода и вывода оконечного устройства. Здесь это конкретно не ограничено.
[00100] Интерфейсный блок 908 представляет собой интерфейс, соединяющий внешнее устройство с оконечным устройством 900. Например, внешнее устройство может включать в себя проводной или беспроводной порт для наушников, порт внешнего источника питания (или зарядного устройства), порт проводной или беспроводной передачи данных, порт карты памяти, порт, используемый для подключения к устройству, имеющему модуль идентификации, порт аудиовхода/выхода (I/O), порт видеовхода/выхода и порт наушников. Интерфейсный блок 908 может быть сконфигурирован для приема ввода (например, информации данных и мощности) от внешнего устройства и передачи принятого ввода на один или несколько элементов в оконечном устройстве 900 или передачи данных между оконечным устройством 900 и внешним устройством.
[00101] Память 909 может быть сконфигурирована для хранения программ и различных данных. Память 909 может в основном включать в себя область хранения программ и область хранения данных. Область хранения программ может хранить операционную систему, прикладную программу, требуемую как минимум для одной функции (такой как функция воспроизведения звука или функция воспроизведения изображения) и т.п. В области хранения данных могут храниться данные (например, аудиоданные или адресная книга), созданные на основе использования мобильного телефона, и т.п. Кроме того, память 909 может включать в себя высокоскоростную память с произвольным доступом и может дополнительно включать в себя энергонезависимую память, например, как минимум одно устройство хранения на магнитном диске, устройство флэш-памяти или другое энергозависимое твердотельное устройство хранения.
[00102] Процессор 910 является центром управления оконечного устройства и соединяет все части всего оконечного устройства с помощью различных интерфейсов и линий. Посредством запуска или выполнения программы программного обеспечения и/или модуля, хранящегося в памяти 909, и вызова данных, хранящихся в памяти 909, процессор 910 выполняет различные функции оконечного устройства и обработки данных для выполнения общего мониторинга на оконечном устройстве. Процессор 910 может включать в себя один или несколько процессоров. Предпочтительно процессор 910 может объединять процессор приложений и процессор модема. Процессор приложений в основном обрабатывает операционную систему, пользовательский интерфейс, прикладную программу и т.п. Процессор модема в основном обрабатывает беспроводную связь. Можно понять, что, в качестве альтернативы, процессор модема может не быть интегрирован в процессор 910.
[00103] Оконечное устройство 900 может дополнительно включать в себя источник питания 911 (например, аккумулятор), который подает питание на различные компоненты. Предпочтительно, источник питания 911 может быть логически подключен к процессору 910 через систему управления источником питания для выполнения функции управления зарядкой, разрядкой и потреблением энергии через систему управления источником питания.
[00104] Кроме того, оконечное устройство 900 включает в себя некоторые функциональные модули, которые не показаны. Подробности здесь снова не описываются.
[00105] Предпочтительно вариант осуществления данного изобретения дополнительно представляет оконечное устройство, включая процессор 910, память 909 и компьютерную программу которая хранится в памяти 909 и которая может выполняться процессором 910. Когда компьютерная программа выполняемые процессором 910, процессы в вышеупомянутых вариантах осуществления способа получения параметров реализуются с тем же достигнутым техническим эффектом. Во избежание повторения подробности здесь снова не описываются.
[00106] Вариант осуществления данного изобретения дополнительно предоставляет машиночитаемый носитель данных. Машиночитаемый носитель данных хранит компьютерную программу, и когда компьютерная программа выполняется процессором, процессы в вышеупомянутых вариантах осуществления способа получения параметров реализуются с тем же достигнутым техническим эффектом. Во избежание повторения подробности здесь снова не описываются. Машиночитаемый носитель данных представляет собой, например, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) или оптический диск.
[00107] Следует отметить, что в данном описании термины «включать», «содержать» или любые их варианты предназначены для охвата неисключительного включения, так что процесс, способ, пункт или устройство, включающие в себя ряд элементов, не только включает в себя эти элементы, но также включают в себя другие элементы, которые явно не перечислены, или дополнительно включают элементы, присущие такому процессу, способу, пункту или устройству. При отсутствии дополнительных ограничений элемент, определенный выражением «включая …», не исключает другой такой же элемент в процессе, способе, пункте или устройстве, включающем данный элемент.
[00108] С помощью вышеупомянутого описания реализаций специалист в данной области техники может ясно понять, что способ в вышеупомянутых вариантах осуществления может быть реализован программным обеспечением с необходимой общей аппаратной платформой. Конечно, способ в вышеупомянутых вариантах осуществления также может быть реализован аппаратными средствами. Однако во многих случаях предпочтительнее первая реализация. Основываясь на таком понимании, технические решения данного изобретения в общем или частью, вносящей вклад в соответствующий уровень техники, могут быть реализованы в форме программного продукта. Компьютерный программный продукт хранится на носителе данных (таком как ROM/RAM, жесткий диск или оптический диск) и включает в себя несколько инструкций для инструктирования оконечного устройства (которым может быть мобильный телефон, компьютер, сервер, кондиционер, сетевое устройство и т.п.) для выполнения способов, описанных в вариантах осуществления данного изобретения.
[00109] Варианты осуществления данного изобретения описаны выше со ссылкой на прилагаемые чертежи, но данное изобретение не ограничивается вышеупомянутыми конкретными реализациями. Вышеупомянутые конкретные реализации являются только иллюстративными, а не ограничивающими. В соответствии с содержанием данного изобретения, специалист в данной области техники может получить множество форм, не отступая от цели данного изобретения и объема защиты формулы изобретения, которые все подпадают под защиту данного изобретения.

Изобретение относится к устройствам захвата изображения, а более конкретно к способу калибровки датчика расстояния устройства захвата изображения. Техническим результатом является обеспечение калибровки датчика расстояния без применения специализированных технических средств и особых технических знаний. Результат достигается тем, что способ включает в себя: получение изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки; получение первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение; и получение смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки. 4 н. и 12 з.п. ф-лы, 9 ил.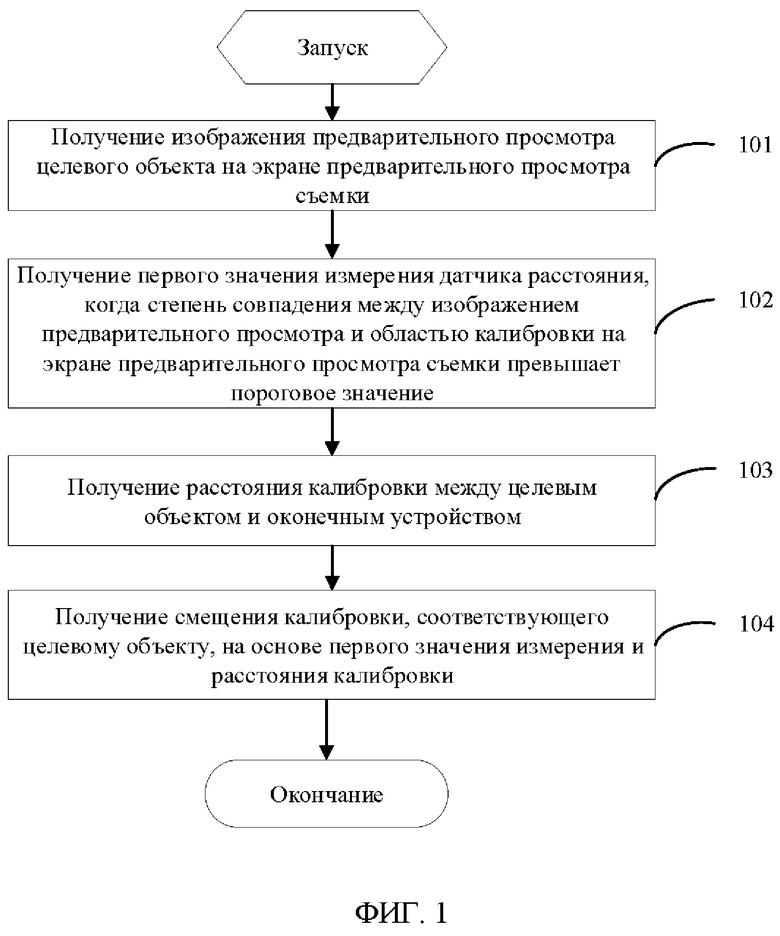
1. Способ получения параметров смещения калибровки, применяемый к оконечному устройству и содержащий:
получение изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки;
получение первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение;
получение расстояния калибровки между целевым объектом и оконечным устройством; и
получение смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
2. Способ по п. 1, в котором получение смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки включает:
использование разницы между первым измеренным значением и расстоянием калибровки в качестве смещения калибровки.
3. Способ по п. 1, в котором после получения смещения калибровки, соответствующего целевому объекту, способ дополнительно содержит:
получение второго значения измерения датчика расстояния; и
получение второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
4. Способ по п. 3, в котором получение второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки включает:
использование разницы между вторым измеренным значением и смещением калибровки в качестве второго калиброванного измеренного значения.
5. Способ по п. 1, в котором получение расстояния калибровки между целевым объектом и оконечным устройством включает:
идентификацию целевого объекта; и
получение расстояния калибровки между целевым объектом и оконечным устройством на основе соответствия между объектами и расстояниями калибровки.
6. Способ по п. 1, где перед получением изображения предварительного просмотра целевого объекта способ дополнительно содержит:
идентификацию целевого объекта; и
отображение на экране предварительного просмотра съемки области калибровки, которая соответствует форме целевого объекта.
7. Способ по п. 1, где после получения изображения предварительного просмотра целевого объекта способ дополнительно содержит как минимум одно из следующих:
отображение первой подсказки, где первая подсказка используется для подсказки пользователю переместить целевой объект так, чтобы изображение предварительного просмотра совпадало с областью калибровки; и
отображение второй подсказки, где вторая подсказка используется для подсказки пользователю выбрать целевой объект с предустановленными характеристиками.
8. Оконечное устройство для съемки изображения, включающее:
первый модуль получения, сконфигурированный для получения изображения предварительного просмотра целевого объекта на экране предварительного просмотра съемки;
второй модуль получения, сконфигурированный для получения первого значения измерения датчика расстояния, когда степень совпадения между изображением предварительного просмотра и областью калибровки на экране предварительного просмотра съемки превышает пороговое значение;
третий модуль получения, сконфигурированный для получения расстояния калибровки между целевым объектом и оконечным устройством; и
четвертый модуль получения, сконфигурированный для получения смещения калибровки, соответствующего целевому объекту, на основе первого значения измерения и расстояния калибровки.
9. Оконечное устройство по п. 8, в котором четвертый модуль получения специально сконфигурирован для использования разницы между первым значением измерения и расстоянием калибровки в качестве смещения калибровки.
10. Оконечное устройство по п. 8, в котором оконечное устройство дополнительно содержит:
пятый модуль получения, сконфигурированный для получения второго значения измерения датчика расстояния; и
модуль калибровки, сконфигурированный для получения второго калиброванного значения измерения на основе второго значения измерения и смещения калибровки.
11. Оконечное устройство по п. 10, в котором модуль калибровки специально сконфигурирован для использования разницы между вторым значением измерения и смещением калибровки в качестве второго калиброванного значения измерения.
12. Оконечное устройство по п. 8, в котором третий модуль получения содержит:
подмодуль идентификации, сконфигурированный для идентификации целевого объекта; и
подмодуль получения, сконфигурированный для получения расстояния калибровки между целевым объектом и оконечным устройством на основе соответствия между объектами и расстояниями калибровки.
13. Оконечное устройство по п. 8, в котором оконечное устройство дополнительно содержит:
модуль идентификации, сконфигурированный для идентификации целевого объекта; и
первый модуль отображения, сконфигурированный для отображения на экране предварительного просмотра съемки области калибровки, которая соответствует форме целевого объекта.
14. Оконечное устройство по п. 8, в котором оконечное устройство дополнительно содержит как минимум один из следующих модулей:
второй модуль отображения, сконфигурированный для отображения первой информации с подсказкой, где первая информация с подсказкой используется для подсказки пользователю переместить целевой объект так, чтобы изображение предварительного просмотра совпадало с областью калибровки; и
третий модуль отображения, сконфигурированный для отображения второй информации с подсказкой, где вторая информация с подсказкой используется для подсказки пользователю выбрать целевой объект с предварительно установленными характеристиками.
15. Оконечное устройство для съемки изображения, содержащее память, процессор и компьютерную программу, хранящуюся в памяти и способную работать на процессоре, при этом, когда компьютерная программа выполняется процессором, реализуются этапы способа получения параметров по любому из пп. 1-7.
16. Машиночитаемый носитель данных, в котором машиночитаемый носитель данных хранит компьютерную программу и, когда компьютерная программа выполняется процессором, реализуются этапы способа получения параметров по любому из пп. 1-7.
| US 8866889 B2, 2014.10.21 | |||
| US 2017372492 A1, 2017.12.28 | |||
| US 2009225330 A1, 2009.09.10 | |||
| US 8654195 B2, 2014.02.18 | |||
| US 2014307126 A1, 2014.10.16 | |||
| US 2017234974 A1, 2017.08.17 | |||
| EP 3414594 A1, 2018.12.19 | |||
| US 2014270540 A1, 2014.09.18 | |||
| US 2015055085 A1, 2015.02.26 | |||
| US 2003222984 A1, 2003.12.04 | |||
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
| СИСТЕМА И СПОСОБ МОДЕЛИРОВАНИЯ И КАЛИБРОВКИ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2677562C2 |

