Уровень техники
Настоящая заявка претендует на приоритет и преимущества заявки U.S.S.N. 15/635,884, поданной 28 июля 2017 г. и включенной сюда посредством ссылки.
Настоящая заявка в общем случае относится к области связи с погруженным в землю устройством, и, более конкретно, к усовершенствованному подавлению пассивных помех в системе направленного бурения, аппаратуре для такого подавления и соответствующим способам.
Технология, часто называемая «горизонтальное направленное бурение» (horizontal directional drilling (HDD)), может быть использована для прокладки инженерных коммуникаций и установки соответствующего оборудования без необходимости копать траншею. Типовая процедура прокладки инженерных коммуникаций использует буровой станок, имеющий бурильную колонну и буровой инструмент, установленный на дальнем или уходящем в землю конце бурильной колонны. Буровой станок с усилием продвигает буровой инструмент в земле, прикладывая осевое усилие к бурильной колонне. Буровым инструментом управляют в процессе выдвижения бурильной колонны для образования пилотной скважины. После завершения создания пилотной скважины дальний конец бурильной колонны прикрепляют к механизму обратного вытягивания, который, в свою очередь, прикрепляют к переднему концу секции инженерных коммуникаций. Механизм обратного вытягивания и секцию инженерных коммуникаций затем протягивают через пилотную скважину посредством отведения бурильной колонны назад для завершения установки секции. В некоторых случаях в состав механизма обратного вытягивания может входить инструмент для обратной проработки скважины, который служит для увеличения диаметра пилотной скважины перед секцией инженерных коммуникаций, так что устанавливаемая секция коммуникаций может иметь диаметр больше первоначального диаметра пилотной скважины.
Управление буровым инструментом может осуществляться хорошо известным способом посредством ориентирования асимметричной передней поверхности бурового инструмента для отклонения желаемого направления в земле в ответ на продвижение вперед. Для регулирования этого управления желательно осуществлять мониторинг ориентации бурового инструмента на основе показаний датчиков, где эти датчики образуют часть электронного модуля, установленного на буровом инструменте. Показаниями этих датчиков, например, может быть модулирован локационный сигнал, передаваемый электронным модулем для приема над землей портативным локатором или другим подходящим надземным устройством. В некоторых системах электронный модуль может соединить сигнал несущей, модулированный показаниями датчиков, с бурильной колонной, чтобы затем передать этот сигнал буровому станку с использованием бурильной колонны в качестве электрического проводника. Независимо от способа передачи данных датчиков и для конкретной величины мощности передачи имеет место ограниченный диапазон передачи, в пределах которого данные датчиков могут быть выделены с достаточной точностью. Этот диапазон передачи может быть дополнительно ограничен активными помехами и пассивными помехами. Активные помехи в общем случае составлены из сигналов от источников электромагнитных сигналов, присутствующих в рабочей области и способных заглушить сигнал, передаваемый системой. Напротив, пассивные помехи служат для блокирования или искажения передаваемого сигнала, что может привести к уменьшению дальности или, в некоторых случаях, к неточным показаниям. Одним из самых распространенных источников пассивных помех является арматура. Для рассмотрения и возможного устранения недостатков известной техники Заявители подали совместную заявку на выдачу патента США no. 14/845,231 (здесь далее «заявка ‘231»), под названием «ПРИМЕНЯЕМЫЙ В СИСТЕМЕ НАПРАВЛЕННОГО БУРЕНИЯ ПРОТОКОЛ СВЯЗИ, АППАРАТУРА И СПОСОБ С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАЧИ МНОГОБИТОВЫХ СИМВОЛОВ ДАННЫХ» (COMMUNICATION PROTOCOL IN DIRECTIONAL DRILLING SYSTEM, APPARATUS AND METHOD UTILIZING MULTI-BIT DATA SYMBOL TRANSMISSION), включенную сюда посредством ссылки во всей своей полноте. Эта заявка ‘231 подана для достижения значительных преимуществ по сравнению с известной на тот момент техникой и продолжает предоставлять такие усовершенствования, однако настоящая заявка выносит на свет дополнительные преимущества и усовершенствования, особенно в отношении пассивных помех, как это будет обсуждаться подробнее в соответствующих пунктах далее.
Приведенные выше примеры ситуации в известной технике и связанных с ней ограничений следует считать только иллюстративными и неисчерпывающими. Другие ограничения соответствующей технике станут очевидными для специалистов в рассматриваемой области после прочтения настоящего описания и изучения чертежей.
Краткое изложение существа изобретения
Следующие варианты и аспекты изобретения описаны и проиллюстрированы в сочетании с системами, инструментами и способами, которые должны быть примерами и иллюстрациями, не ограничивая объем. В различных вариантах одна или несколько из указанных выше проблем были ослаблены или исключены полностью, тогда как другие варианты направлены на другие усовершенствования.
В одном из аспектов настоящего изобретения предложены передатчик и ассоциированный способ для использования в сочетании с системой горизонтального направленного бурения, которая содержит бурильную колонну, проходящую от бурового станка к погружаемому в землю инструменту с установленным на этом инструменте передатчиком, так что выдвижение и отведение назад бурильной колонны приводит к перемещению погружаемого в землю инструмента сквозь землю во время подземных работ. Передатчик содержит антенну и один или несколько датчиков для генерации данных датчиков. Драйвер антенны электрически возбуждает антенну для излучения сигнала глубины в ответ на входной драйверный сигнал глубины для надземного приема с целью использования при определении глубины погружаемого в землю инструмента и для электрического возбуждения антенны в ответ на входной драйверный сигнал данных с целью излучения по меньшей мере одного сигнала данных, характеризующего данные датчиков с использованием по меньшей мере одной частоты сигнала данных, которая выше частоты сигнала глубины, для надземного выделения данных датчиков. Процессор конфигурирован для генерации входного драйверного сигнала глубины на частоте сигнала глубины и для генерации входного драйверного сигнала данных, характеризующего данные датчиков, таким способом, который управляет мощностью передачи сигнала глубины относительно мощности передачи сигнала данных, так что одна дальность приема сигнала глубины по меньшей мере частично совпадает с другой, отличной от нее дальностью приема сигнала данных.
Согласно другому аспекту настоящего изобретения драйвер антенны электрически возбуждает антенну передатчика для излучения сигнала глубины в ответ на драйверный сигнал глубины для надземного приема с целью определения глубины погружаемого в землю инструмента и электрически возбуждает антенну для излучения сигнала данных, характеризующего данные датчиков с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем сигнал глубины, для надземного выделения данных датчика. Процессор конфигурирован для генерации драйверного сигнала глубины на частоте сигнала глубины и для генерации драйверного сигнала данных на частоте сигнала данных с целью управления одной дальностью приема сигнала глубины относительно другой, отличной от нее дальности приема сигналы данных.
Согласно еще одному другому аспекту настоящего изобретения предложены система, портативное устройство и ассоциированный способ, в соответствии с которым передатчик конфигурирован для перемещения сквозь землю в некоторой области во время рабочей процедуры, передавая сигнал глубины на частоте сигнала глубины, выбираемой в диапазоне частот сигнал глубины ниже 1 кГц, с целью обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, причем эти система и устройство также подвержены воздействию электромагнитных шумов, которые могут изменяться в пределах рассматриваемой области. Портативное устройство конфигурировано для сканирования нескольких частот в диапазоне частот сигнала глубины для измерения уровня электромагнитных шумов на каждой из этих нескольких частот и идентификации частоты с самым низким измеренным уровнем шума в качестве потенциальной частоты сигнала глубины, удовлетворяющей требованиям низких шумов, на основе измеренных шумов.
Согласно следующему аспекту настоящего изобретения портативное устройство служит частью системы, в которой передатчик конфигурирован для перемещения сквозь землю в некоторой области в ходе рабочей процедуры, передавая сигнал глубины на частоте сигнала глубины. Портативное устройство содержит антенну для приема сигнала глубины и генерации выходного сигнала. Приемник конфигурирован для измерения уровня электромагнитных шумов на основе выходного сигнала антенны по меньшей мере в двух разных частотных диапазонах ниже 1 кГц посредством пошагового сканирования каждого частотного диапазона с целью генерации множества отсчетов уровня шума с некоторым шагом по частоте в каждом частотном диапазоне и представления на дисплее одной или нескольких потенциальных частот сигнала глубины для каждого частотного диапазона на основе указанных отсчетов уровня шума с некоторым шагом по частоте для выбора оператором одной из нескольких потенциальных частот сигнала глубины в качестве используемой частоты для сигнала глубины.
Согласно другому аспекту настоящего изобретения предложены система и ассоциированный способ, в соответствии с которым передатчик конфигурирован для перемещения сквозь землю в некоторой области в ходе рабочей процедуры, передавая в это время сигнал глубины на частоте, выбираемой в диапазоне частот сигнала глубины ниже 1 кГц с целью обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, причем эти система и устройство также подвержены воздействию электромагнитных шумов с частотами ниже 1 кГц, которые могут изменяться в пределах рассматриваемой области. Портативное устройство конфигурировано для измерения уровня электромагнитных шумов по меньшей мере в двух частотных диапазонах ниже 1 кГц путем пошагового сканирования каждого частотного диапазона с целью генерации множества отсчетов уровня шума с некоторым шагом по частоте в каждом частотном диапазоне и представления на дисплее одной или нескольких потенциальных частот сигнала глубины для каждого частотного диапазона на основе указанных отсчетов уровня шума с некоторым шагом по частоте для выбора оператором одной или нескольких потенциальных частот сигнала глубины в качестве используемой частоты сигнала глубины.
Согласно следующему аспекту настоящего изобретения, предложены портативное устройство и ассоциированный способ в качестве части системы, в которой передатчик конфигурирован для перемещения сквозь землю в некоторой области в ходе рабочей процедуры, передавая в это время сигнал глубины на частоте сигнала глубины и поток данных на одной или нескольких частотах данных, что по меньшей мере характеризует параметр ориентации передатчика. Портативное устройство содержит антенну для приема сигнала глубины и частот данных для генерации выходного сигнала. Секция переключаемого фильтра ограничивает выходной сигнал антенны в нормальном режиме одним частотным диапазоном выше заданной частоты для пропускания сигнала глубины и потока данных на одной или нескольких частотах и ограничивает выходной сигнал антенны в арматурном режиме другим частотным диапазоном для пропускания сигнала глубины на частоте ниже заданной частоты и потока данных на частотах выше заданной частоты. Процессор конфигурирован для переключения секции переключаемого фильтра между нормальным режимом и арматурным режимом для выделения сигнала глубины и потока данных в соответствии с выбором нормального режима и арматурного режима.
Согласно другому аспекту настоящего изобретения предложены система, способ и аппаратура, где передатчик конфигурирован для перемещения сквозь землю в некоторой области в ходе рабочей процедуры, передавая в это время сигнал глубины на выбираемой частоте сигнала глубины, устанавливаемой равной какой-либо одной из нескольких разделенных определенными промежутками частот в диапазоне частот сигнала глубины ниже 1 кГц с целью обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, причем эти система и аппаратура также подвержены воздействию электромагнитных шумов с частотами ниже 1 кГц, которые могут изменяться в пределах рассматриваемой области. Портативное устройство конфигурировано для сканирования указанной совокупности из нескольких разделенных промежутками частот ниже 1 кГц с целью измерения уровня электромагнитных шумов на каждой из этой совокупности разделенных промежутками частот для идентификации по меньшей мере одной частоты с низким уровнем шумов для установления частоты сигнала глубины в передатчике с целью динамического позиционирования частоты сигнала глубины относительно низкочастотных шумов.
Краткое описание чертежей
Примеры вариантов проиллюстрированы соответствующими чертежами. Представленные здесь варианты и чертежи предназначены служить иллюстрациями, а не ограничениями.
Фиг. 1 представляет схематичное изображение варианта системы для осуществления подземных работ согласно настоящему изобретению.
Фиг. 2 представляет схематичное изображение в перспективе, с частичным вырезом, иллюстрирующее вариант передатчика согласно настоящему изобретению.
Фиг. 3 представляет блок-схему, иллюстрирующую дополнительные подробности о варианте передатчика, показанном на фиг. 2.
Фиг. 4 представляет блок-схему, иллюстрирующую подробности одного из вариантов синтезатора частоты, составляющего часть варианта передатчика, показанного на фиг. 2 и 3.
Фиг. 5a показывает схематичное представление преобразовательной таблицы, которая может быть использована в качестве преобразовательных таблиц глубины и частоты символов, показанных на фиг. 4.
Фиг. 5b показывает схематичное представление форм сигнала возбуждения антенны на основе увеличивающейся частоты.
Фиг. 5c показывает схематичное представление одного из вариантов диапазонов передатчика для использования в арматурном режиме.
Фиг. 6a представляет график спектральной плотности мощности шумов, изображенный с высоким разрешением и соответствующий фактическому физическому пункту, где используется промышленная частота 50 Гц.
Фиг. 6b представляет схематичную иллюстрацию одного из вариантов скриншота, показывающего изображение на экране дисплея 36, содержащее столбчатую диаграмму, иллюстрирующую средний уровень шумов в каждом частотном поддиапазоне для варианта диапазонов передатчика, показанных на фиг. 5b.
Фиг. 6c представляет схематичную иллюстрацию другого варианта скриншота, показывающего изображение на экране дисплея 36, содержащее столбчатую диаграмму, иллюстрирующую измеренный уровень шумов при сканировании шумов в арматурном режиме для варианта диапазонов передатчика, показанных на фиг. 5c.
Фиг. 7 представляет дополнительно увеличенное изображение поддиапазона 10, изображенного на фиг. 6a и показанного здесь, чтобы способствовать обсуждению части области частоты сигнала глубины и частот символов.
Фиг. 8 представляет логическую схему, иллюстрирующую один из вариантов работы передатчика согласно настоящему изобретению.
Фиг. 9a представляет блок-схему, иллюстрирующую один из вариантов портативного устройства, показанного на фиг. 1.
Фиг. 9b представляет график, схематично иллюстрирующий один из вариантов нормированной характеристики фильтра, показанного на фиг. 9a, в нормальном режиме.
Фиг. 9c представляет график, схематично иллюстрирующий один из вариантов нормированной характеристики фильтра, показанного на фиг. 9a, в арматурном режиме.
Фиг. 10a представляет растянутое изображение частотного поддиапазона 6, показанного на фиг. 6a.
Фиг. 10b представляет схематичную иллюстрацию одного из вариантов скриншота, показывающего вид поддиапазона 6 на экране дисплея с целью выбора и модификации частот символов, равно как и других функций, оператором согласно настоящему изобретению.
Фиг. 11 представляет дополнительно увеличенное изображение части поддиапазона 6, изображенного на фиг. 10a и 10b и показанного здесь с целью описания дальнейших подробностей относительно выбора частоты символов.
Фиг. 12a представляет логическую схему, иллюстрирующую один из вариантов способа работы портативного устройства согласно настоящему изобретению, с целью спектрального сканирования и назначения частоты символов для работы в нормальном режиме.
Фиг. 12b представляет логическую схему, иллюстрирующую другой вариант способа работы портативного устройства согласно настоящему изобретению, с целью спектрального сканирования и назначения частоты символов для работы в арматурном режиме.
Фиг. 12c представляет логическую схему, иллюстрирующую еще один другой вариант способа работы портативного устройства согласно настоящему изобретению, с целью спектрального сканирования и назначения частоты символов для работы в арматурном режиме.
Фиг. 12d представляет логическую схему, иллюстрирующую еще один другой вариант способа работы портативного устройства согласно настоящему изобретению, с целью спектрального сканирования и назначения частоты символов для работы в арматурном режиме.
Фиг. 12e представляет логическую схему, иллюстрирующую еще один другой вариант способа работы портативного устройства согласно настоящему изобретению, с целью спектрального сканирования и назначения частоты символов для работы в арматурном режиме.
Фиг. 13 представляет логическую схему, иллюстрирующую один из вариантов способа работы портативного устройства согласно настоящему изобретению для приема сигнала глубины и сигнала данных во время подземных работ.
Подробное описание
Последующее описание представлено с целью позволить даже рядовому специалисту в рассматриваемой области изготовить и использовать предмет настоящего изобретения и составлено в контексте заявки на выдачу патента и требований к таким заявкам. Разнообразные модификации описываемых здесь вариантов будут легко видны для специалистов в отрасли, а изложенные здесь общие принципы могут быть применимы к другим вариантам. Таким образом, представленные здесь варианты не предназначены для ограничения настоящего изобретения, а должны соответствовать широчайшему объему, согласованному с принципами и признаками, описываемыми здесь, включая модификации и эквиваленты. Следует отметить, что приведенные чертежи выполнены не в масштабе и являются схематичными по своей природе в той степени, в какой это считается подходящим для наилучшей иллюстрации интересующих признаков. Терминология описания может быть принята для целей улучшения понимания читателем различных изображений, представленных на чертежах, и никоим образом не предназначена для ограничения.
В качестве введения, Заявители понимают, что, хотя в известной технике предпринимались попытки решения проблем пассивных помех, например, обусловленных присутствием арматуры, здесь все еще остается потребность в усовершенствованиях. Заявители утверждают, что пассивные помехи являются постоянно существующей проблемой, представляющей одно из самых сложных затруднений, которое необходимо преодолеть на рабочем месте в дополнение к активным помехам, и, до настоящего момента, это затруднение не было разрешено в приемлемой степени известной техникой. Заявители сегодня сознают, что пассивные помехи влияют на прием электромагнитных сигналов одним способом при определении глубины и местонахождения погруженного в землю передатчика, и совершенно по-другому эти пассивные помехи влияют на извлечение из электромагнитного сигнала потока данных, характеризующего ориентацию и другие параметры погруженного в землю передатчика. В этом отношении, определение глубины и местонахождения погруженного в землю передатчика зависят от формы и уровня сигнала в электромагнитном поле или линий индукции электромагнитного сигнала. Форма электромагнитного поля электромагнитного сигнала, однако, может быть искажена присутствием электрических проводников, таких как, например, арматура. Эти искажения могут привести к неточному определению глубины и местонахождения. Хотя эти искажения могут быть уменьшены путем уменьшения частоты электромагнитного сигнала, Заявители сознают, что такие искажения оказывают небольшое, если вообще оказывают, влияние на выделение потока данных или данных из электромагнитного сигнала, характеризующего ориентацию погруженного в землю передатчика. Иными словами, данные могут быть декодированы из более высокочастотного электромагнитного сигнала независимо от искажений поля, до тех пор, пока имеется достаточный уровень сигнала для того, чтобы можно было декодировать принятый сигнал. Соответственно, Заявители предложили отделение того, что следует считать ультранизкой частотой сигнала глубины (например, на частоте 1 кГц или ниже, либо на частоте 1,5 кГц или ниже) от совокупности одной или нескольких частот сигнала данных, так что частота сигнала глубины проявляет более высокую защищенность от пассивных помех, чем более высокочастотный сигнал данных с частотами выше какой-либо подходящей пороговой или предельной частоты, такой как, например, выше 1 кГц или 1.5 кГц, которая более подвержена влиянию пассивных помех, чем частота сигнала глубины, с точки зрения формы поля, но тем не менее служит для передачи потока данных, несмотря на дополнительные искажения поля в присутствии пассивных помех. В то же самое время таким низкочастотным диапазонам присуща склонность к ультравысокой зашумленности. Заявители решают эту проблему на основе введения дополнительной способности сканировать электромагнитные шумы в подходящем низкочастотном диапазоне, таком как, например, диапазон от промышленной частоты до подходящего верхнего частотного предела 1 кГц или 1.5 кГц, с целью определения одной или нескольких частот в низкочастотном диапазоне, которые совсем свободны от шумов или по меньшей мере имеют относительно небольшое содержание шумов, избегая тем самым присутствия слишком сильных шумов. Заявители уверены, что сочетание признаков, описанное выше и где-либо еще в настоящем документе, не встречалось в технике ранее по меньшей мере по той причине, что в технике преобладало представление, что столь ультранизкие частоты (например, частоты не выше 1 кГц или 1.5 кГц) не являются практически полезными частотами сигнала глубины из-за присутствия сильных активных помех на таких низких частотах. Иными словами, рядовой специалист в рассматриваемой области отверг бы идею таких низких частот, поскольку это могло бы сделать систему неспособной принимать сигнал глубины, и потенциально даже сигнал данных из-за необходимости допустить дополнительные низкочастотные активные помехи, чтобы можно было принять низкочастотный сигнал глубины. Утверждается, что настоящее изобретение устраняет проблемы известного уровня техники. Бит для целей настоящей заявки представляет собой элемент двоичных данных, характеризуемый как 1/0, +/- и т.п. Символ для целей настоящей заявки представляет собой элемент данных, представляющий один или несколько битов. Многобитовый символ представляет два или более битов. Символ может характеризовать какой-либо подходящий тип информации, такой как, например, данные тангажа, данные крена, данные температуры, данные аккумулятора и данные синхронизации без ограничений. Разные многобитовые символы представляют разные многобитовые элементы данных. Например, 16 разных символов могут представлять четырехбитовый элемент данных. Каждый многобитовый символ для целей настоящего изобретения представлен своей конкретной частотой, отличной от частоты, ассоциированной с каким-либо другим многобитовым символом. Поток символов образован последовательно передаваемыми многобитовыми символами, так что этот поток символов может быть декодирован для преобразования в соответствующий поток цифровых данных, которые могут быть двоичными. Поток символов может быть передан в виде пакетной структуры, так что конкретная позиция рассматриваемого символа в пакетной структуре определяет тип данных, ассоциированных с таким символом.
На разных чертежах подобным объектам могут быть присвоены подобные цифровые позиционные обозначения. Здесь фиг. 1 иллюстрирует один из вариантов системы для осуществления подземных работ, в целом обозначенный поз. 10. Система содержит портативное устройство 20, которое, как показано, держит оператор над поверхностью 22 земли. Это же устройство показано в увеличенном виде на врезке. Следует отметить, что внутри устройства 20 показано только ограниченное число кабелей для сохранения ясности иллюстрации, но понятно, что в устройстве присутствуют все необходимые кабели и что оно может быть сравнительно просто реализовано даже рядовым специалистом в рассматриваемой области с учетом полного текста настоящего описания. Устройство 20 содержит трехосный антенный кластер 26 для измерения трех взаимно ортогонально ориентированных составляющих магнитного потока. Один из вариантов подходящего для использования здесь антенного кластера описан в патенте США no. 6,005,532, представляющем собой совместный патент с настоящей заявкой и включенном сюда посредством ссылки. Подробности относительно используемого здесь варианта антенны будут приведены в соответствующем пункте в дальнейшем. Антенный кластер 26 электрически соединен с электронной секцией 32. Устройство может содержать датчик угла наклона 34 для измерения гравитационных углов, от которых могут быть определены компоненты потока в уровневой системе координат. Соответствующий датчик угла наклона содержит, в качестве неисчерпывающего примера, трехосный акселерометр.
Устройство 20 может далее содержать графический дисплей 36 и телеметрическую антенну 40. Последняя может передавать или принимать телеметрический сигнал 44 для осуществления связи с обменом данными с буровым станком. Следует понимать, что графический дисплей 36 может представлять собой сенсорный экран с целью способствовать выбору оператором различных кнопок, представленных на экране, и/или может быть организована прокрутка между различными кнопками, представленными на экране, чтобы способствовать выбору кнопок оператором. Такой сенсорный экран может быть использован отдельно или в сочетании с устройством 48 ввода таким как, например, кнопка пуска. Последняя может быть использована без необходимости сенсорного экрана. Более того, могут быть использованы различные варианты устройства ввода, которые могут использовать колесики прокрутки и другие подходящие формы устройства выбора либо уже существующие и доступные, либо такие, какие еще должны быть разработаны. Электронная секция может содержать компоненты, такие как, например, один или несколько процессоров, запоминающее устройство какого-либо подходящего типа, драйверы антенны и аналого-цифровые преобразователи. Как хорошо известно в технике, последние должны быть способны измерять частоту, которая по меньшей мере вдвое превышает наивысшую частоту интересующего диапазона. По желанию могут быть добавлены другие компоненты, такие как, например, магнитометр 50, чтобы способствовать определению местонахождения относительно направления бурения и ультразвуковые преобразователи для измерения высоты устройства над поверхностью земли.
Как показано на фиг. 1, система 10 далее содержит буровой станок 80, имеющий каретку 82, установленную для перемещения вдоль пары противоположных рельсов 84. К противоположному концу бурильной колонны 92 прикреплен погружаемый в землю инструмент 90. В качестве неисчерпывающего примера буровой инструмент показан в виде погружаемого в землю инструмента и используется в таком качестве в виде базового варианта для настоящего описания, однако следует понимать, что здесь может быть использовано любое подходящее погружаемое в землю устройство, такое как, например, инструмент для обратной проработки скважины, применяемый в ходе операции обратного вытягивания, или согласующий инструмент. В общем случае, бурильная колонна 92 выполнена из нескольких разъемно соединяемых одна с другой бурильных труб, так что буровой станок может с усилием загонять бурильную колонну в землю с использованием перемещения колонны в направлении стрелки 94 и отводить эту бурильную колонну назад в ответ на перемещение в противоположном направлении. Секции бурильных труб могут образовать сквозной канал для подачи бурового раствора или жидкости, исходящей из бурового инструмента под давлением, чтобы помогать резанию сквозь землю, равно как и охлаждению головки бура. В общем случае, буровой раствор служит также для поддержания во взвешенном состоянии и осуществления резания по поверхности вдоль наружной длины бурильной колонны. Управление здесь можно осуществлять хорошо известным способом путем ориентации асимметричной поверхности 96 бурового инструмента для отклонения в желаемом направлении в земле в ответ на проталкивание колонны для перемещения вперед, что может называться «режим проталкивания». Результатом поворота или вращения 98 бурильной колонны посредством бурового станка будет в общем случае продвижение бурового инструмента вперед или по прямой, что также может называться режимом «вращения» или режимом «продвижения» вперед.
Операцией бурения может управлять оператор (не показан) с пульта 100 управления, который сам по себе содержит телеметрический приемопередатчик 102, соединенный с телеметрической антенны 104, экран 106 дисплея, устройство ввода, такое как клавиатура 110, и процессорную схему 112, которая может содержать подходящие интерфейсы и запоминающее устройство, равно как один или несколько процессоров. Несколько рычажков 114 управления, например, осуществляют управление перемещением каретки 82. Телеметрический приемопередатчик 104 может передавать или принимать сигнал 116 телеметрии, чтобы способствовать двусторонней связи с портативным устройством 20. В одном из вариантов экран 106 может представлять собой сенсорный экран, так что клавиатура 110 может быть в этом случае только опцией.
В одном из вариантов устройство 20 может быть конфигурировано для приема электромагнитного сигнала 120 глубины и электромагнитного сигнала 122 данных, передаваемых от передатчика 130, установленного внутри бурового инструмента или другого погружаемого в землю инструмента. Эти сигналы могут здесь коллективно называться сигналами передатчика. Сигналы передатчика могут представлять собой дипольные сигналы. Следует понимать, что портативное устройство может работать в режиме передвижного локатора, как показано на фиг. 1, либо в стационарном режиме, когда это портативное устройство установлено на земле, например, как показано в совместном патенте США no. 9,540,879, который включен сюда посредством ссылки. Хотя настоящее изобретение иллюстрирует дипольное локационное поле для определения местонахождения, передаваемое от бурового инструмента и вращающееся вокруг оси симметрии этого поля, настоящее изобретение не следует считать ограниченным в этом отношении.
Информация, передаваемая сигналом данных, может содержать, не ограничиваясь этим, параметры пространственной ориентации на основе датчиков ориентации по тангажу и крену, значений температуры, значений давления, состояния аккумулятора, показаний датчика натяжения в контексте операции обратного вытягивания и других подобных параметров. Устройство 20 принимает сигналы передатчика с использованием антенной решетки 26 и обрабатывает принятый сигнал 122 данных для выделения из него данных, как это будет описано далее.
На фиг. 2 представлено схематичное изображение в перспективе, с частичным вырезом, иллюстрирующее один из вариантов передатчика 130. Последний содержит главный корпус, который может быть по меньшей мере в основном цилиндрическим по конфигурации. На одном конце корпуса может быть выполнен аккумуляторный отсек 138, тогда как на противоположном конце 140 может быть установлена главная печатная плата (printed circuit board (PCB)) 144, которая сама может служить опорой для антенны 148, излучающей сигналы передатчика. Рядом с одним концом платы PCB 144 может располагаться модуль 150 акселерометра. Другие датчики и компоненты могут быть расположены на главной печатной плате, как это будет описано далее.
Обратимся теперь к блок-схеме, показанной на фиг. 3, в сочетании с фиг. 2 с целью описания дополнительных подробностей в отношении одного из вариантов передатчика 130. Этот передатчик содержит процессорную секцию 152, принимающую информацию от датчиков через мультиплексор 154. Этот мультиплексор 154 может быть сопряжен с любым числом датчиков, образующих комплект датчиков. В рассматриваемом примере совокупность этих датчиков содержит акселерометры 158, которые установлены в модуле 150 акселерометра, показанном на фиг. 2, датчик давления 160, который может быть использован для измерения давления в кольцевом пространстве в скважине вокруг передатчика, датчик 164 температуры, измеритель 168 тока аккумулятора и датчик 170 напряжения аккумулятора. Внешняя связь для передатчика может быть предоставлена, в некоторых вариантах, внешним соединением 174 связи. Сигналы такой связи не требуется передавать сквозь землю, напротив, ее можно осуществлять, когда передатчик находится над землей, например, в позиции рядом с устройством 20. Внешняя связь может быть реализована каким-либо подходящим способом, включая, но не ограничиваясь, инфракрасную связь IrDA, связь в ближней зоне NFC, WiFi, Zigbee или Bluetooth. Секция 178 источника питания может содержать аккумулятор 180, который подает питание через детектор 184 перенапряжения и обратной полярности. Этот детектор передает напряжение питания в источник 188 питания логических схем и датчиков и в источник 190 питания драйверов антенны. Источник питания логических схем и датчиков передает напряжение питания комплекту датчиков, равно как и в процессорную секцию 152. Источник питания драйверов антенны передает напряжение питания драйверу 194 антенны для сигнала глубины и драйверу 198 антенны для сигнала данных, которые электрически возбуждают противоположные концы антенной катушки, составляющей часть антенны 148. Драйверы 194 и 198, в одном из вариантов, могут представлять собой полумостовые драйверы. Драйверы антенны принимают входные сигналы от процессора 200, составляющего часть процессорной секции. Эта процессорная секция далее содержит генератор 210, такой как, например, кварцевый генератор. Этот генератор может быть выбран для обеспечения относительно высокой степени термостабильности и общей стабильности. Процессор (CPU) 200 содержит таймерную секцию 212, которая может служить для генерации опорного сигнала, стабильность которого отражает стабильность генератора 210. Выходную частоту таймера выбирают на основе значения таймера перезагрузки, которое может быть задано пользователем. Процессор соединен для обмена данными с запоминающим устройством 218, которое может содержать любую подходящую информацию, включая, не ограничиваясь, информацию 224 о частоте сигнала глубины и информацию 228 о частоте символов, каждая из которых будет описана в подходящий момент далее.
На фиг. 4, представлена схема одного из вариантов синтезатора частоты, обозначенная в виде поз. 300 и реализованная как часть процессорной секции 152, показанной на фиг. 3. Следует понимать, что синтезатор частоты может быть реализован в форме аппаратуры, программного обеспечения или какого-либо подходящего сочетания аппаратуры и программного обеспечения. Синтезатор частоты может представлять собой какой-либо подходящий вариант, либо уже существующий и доступный в настоящий момент, либо такой, который еще должен быть разработан. Вариант, показанный на фиг. 4, представляет собой двухканальный синтезатор прямого цифрового синтеза (direct digital synthesizer (DDS)), имеющий канал 304 глубины и символьный канал 308. Канал глубины передает свой выходной сигнал 310 драйверу 194 сигнала глубины, показанному на фиг. 3, для формирования сигнала 120 глубины, тогда как символьный канал передает свой выходной сигнал 312 драйверу 198 сигнала данных, показанному на фиг. 3, для формирования сигнала 122 данных (фиг. 1 и 2). Каждая из секций - секция 320 преобразовательных таблиц формы сигнала в канале глубины и секция 324 преобразовательных таблиц формы сигнала символьного канала, содержит по меньшей мере по одной преобразовательной таблице формы сигнала или фазы сигнала, которая характеризует один период формы выбранного сигнала, такой как, например, синусоида. В другом варианте каждая из этих секций - секция преобразовательных таблиц канала глубины и секция преобразовательных таблиц символьного канала, может содержать несколько преобразовательных таблиц формы или фазы сигнала. В рассматриваемом примере имеется по одной преобразовательной таблице форме сигнала, показанной схематично и обозначенной поз. 326, в каждой из секций преобразовательных таблиц - секции для канала глубины и секции для символьного канала. Следует понимать, что любая желаемая форма сигнала может быть охарактеризована своей преобразовательной таблицей. Далее, не требуется, чтобы преобразовательная таблицы (ы) канала глубины и преобразовательная таблицы (ы) символьного канала характеризовали одну и ту же форму (ы) сигнала. В некоторых вариантах синтезатора частоты нет никаких требований к преобразовательной таблице. Например, может быть использовано подходящее математическое выражение.
На фиг. 5a представлена графическая иллюстрация преобразовательной таблицы 326, которая может содержать большое число отсчетов величины характеризуемой формы сигнала на основе, например, доступного объема запоминающего устройства и желаемого разрешения. В предположении, что в рассматриваемом варианте канал глубины и символьный канал используют одну и ту же преобразовательную таблицу, следует понимать, что в этом случае необходимо сохранить только единственную копию для доступа из обоих каналов. В рассматриваемом варианте преобразовательная таблица 326 представляет один период сигнала синусоидальной формы. По вертикальной оси представлена доля широтно-импульсной модуляции (ШИМ (Pulse Width Modulation (PWM))), где положительному пику сигнала соответствует уровень 100%, а отрицательному пику сигнала соответствует уровень 0% по причинам, которые еще будут описаны. Горизонтальная ось графика представляет временные интервалы (слоты), где каждый конкретный временной слот имеет ассоциированную с ним амплитуду. Величины временных слотов можно считать отсчетами, адресация к которым осуществляется избирательно посредством накопителя 330 фазы канала глубины и накопителя 334 фазы символьного канала, соответственно, с использованием структуры адресации шириной «m». Следует отметить, что с рассматриваемой преобразовательной таблицей может быть ассоциировано большое число отсчетов. Каждый накопитель фазы конфигурирован для предоставления выходного отсчета в секцию преобразовательной таблицы на основе входного приращения или величины сдвига, определяемой модулем 338 управления частотой канала глубины и модулем 340 управления частотой символьного канала, соответственно. Каждый накопитель фазы генерирует то, что можно назвать квантованным выходным сигналом пилообразной формы, который изменяется от одного уровня или отсчета к следующему на соответствующую величину входного приращения. В ответ на каждый поступающий на ее вход отсчет от соответствующего накопителя фазы, либо из канала глубины, либо из символьного канала, преобразовательная таблица 326 последовательно генерирует цифровую выходную величину, принимаемую генератором 350 с широтно-импульсным модулятором (PWM) в канале глубины и генератором 352 с широтно-импульсным модулятором (PWM) в символьном канале, соответственно, в адресной конфигурации шириной «n». На основе цифровой величины, принятой каждым ШИМ-генератором, широтно-импульсный модулятор генерирует выходную последовательность импульсов, имеющих по меньшей мере в основном постоянную выходную амплитуду, но длительность (ширина) такого импульса увеличивается пропорционально выходной величине из преобразовательной таблицы. Фильтрация, за счет индуктивных свойств антенны 148 сглаживает форму сигнала с целью аппроксимации желаемой формы выходного сигнала, такой как, например, синусоидальная форма.
В схеме, показанной на фиг. 4, каждый из сигналов - выходной сигнал 360 канала глубины и выходной сигнал 362 символьного канала, можно генерировать, например, во всем диапазоне частот от частоты, близкой к 0 Гц, до 45 кГц с высокой степенью точности. Должно быть понятно, что здесь может быть использован любой подходящий частотный диапазон и что диапазон от 0 до 45 кГц приведен здесь лишь в качестве примера, так что его не следует считать исчерпывающим. В приведенном примере погрешность может быть не хуже, чем приблизительно +/- 0.1 Гц или меньше, при разрешении не хуже, чем приблизительно 5 Гц. Следует отметить, что указанная точность, в контексте рассматриваемого варианта, приведена для частоты по меньшей мере приблизительно 45 кГц, которая представляет нижнюю границу точности в диапазоне частот. По сравнению с известными в технике подходами следует понимать, что настоящее изобретение обеспечивает более высокую точность, повышенную согласованность и заметную гибкость с точки зрения выбора частоты во всем диапазоне передачи. Частоты выходных сигналов 360 и 362 устанавливают на основе величины приращения на входе, поступающей в накопитель 330 фазы канала глубины через модуль 338 управления частотой канала глубины и в накопитель 334 фазы символьного канала через модуль 340 управления частотой символьного канала. Модуль 338 управления частотой канала глубины принимает входной сигнал 368 частоты сигнала глубины, указывающий частоту сигнала глубины. Модуль управления частотой канала глубины может преобразовать заданную частоту сигнала глубины в величину приращения для накопителя 330 фазы канала глубины каким-либо подходящим способом. В одном из вариантов модуль управления частотой канала глубины может содержать преобразовательную таблицу 370 приращений, которая устанавливает соответствие между частотой сигнала глубины и величиной приращения. В другом варианте для определения величины приращения можно использовать следующую формулу:

Здесь размер накопителя фазы выбирают для обеспечения минимально необходимого разрешения по частоте, а частоту обновления накопителя фазы устанавливают посредством таймера 212 (фиг. 3). Аналогично, модуль управления частотой символьного канала может преобразовать заданную частоту символов, принимаемых на вход 374 потока символов данных, в величину приращения для накопителя 334 фазы символьного канала каким-либо подходящим способом, таким как, например, путем использования преобразовательной таблицы 370 приращений или формулы. Источник, из которого поток символов данных поступает на вход 374 потока символов данных, будет описан в соответствующий момент в дальнейшем. Следует отметить, что отсутствует требование к модулям управления частотой канала глубины и частотой символьного канала, чтобы они обязательно использовали идентичные преобразовательные таблицы величин приращения. Табл. 1 ниже иллюстрирует часть одного из вариантов преобразовательной таблицы 370 приращений.
Таблица 1. Соотношение между желаемой выходной частотой и приращением размера накопителя фазы
(Гц)
(отсчеты)
На основе таблицы 1, следует понимать, что она обеспечивает высокую степень разрешения в терминах частоты, выбираемой для каждого из сигналов - частоты выходного сигнала 360 канала глубины и частоты выходного сигнала 362 символьного канала. В рассматриваемом варианте разрешение 5 Гц может быть реализовано во всем диапазоне частот, от промышленной частоты электросетей переменного тока по всему миру до 45 кГц. Безусловно, другие варианты могут использовать сходное или другое разрешение даже на еще более высоких частотах. Можно использовать и другие величины разрешения, среди которых какие-то являются более грубыми, а какие-то даже еще более тонкими. Заявители считают, что величина 5 Гц представляет собой относительно небольшой общий множитель значений 50 Гц и 60 Гц, которые являются самыми распространенными промышленными частотами по всему миру. Дальнейшее обсуждение вопросов, связанных с промышленной частотой, буде приведено ниже.
Продолжая рассматривать фиг. 4, должно быть понятно, что частота выходного сигнала 360 канала глубины и частота выходного сигнала 362 символьного канала показаны в виде частотных тонов, которые имеют ограниченную или фиксированную длительность, по меньшей мере в основном фиксированную частоту и могут иметь переменную амплитуду. В этом отношении, первичное управление амплитудой может осуществляться на основе множителя, который может быть установлен посредством таблицы 376 множителей, доступной для обращения для обоих модулей - модуля 338 управления частотой канала глубины и модуля управления частотой символьного канала 340. Множитель этот определен в диапазоне от 0 до 1.0. С целью получения желаемой мощности передачи на рассматриваемой конкретной частоте отсчеты, полученные из преобразовательной таблицы 326, умножают на этот множитель. Таким образом, множитель, равный 1.0, дает максимальную или 100 % амплитуду, тогда как множитель, равный нулю, дает нулевой выходной сигнал. Как будет описано далее, таблица множителей может быть использована для компенсации изменений связи между антенной и драйверными схемами, равно как изменений полного сопротивления антенны в ответ на изменяющуюся частоту.
Здесь снова, нужно будет сохранять только одну копию таблицы множителей, если одна и та же таблица используется для обоих каналов. Далее, формирование величины/амплитуды может осуществляться с использованием модуля 380 управления формой/амплитудой сигнала в канале глубины, который может называться формирователем канала глубины, и с использованием модуля 382 управления формой/амплитудой сигнала символьного канала, который может называться формирователем символьного канала. В другом примере выходной сигнал генератора 350 ШИМ-сигнала канала глубины представляет собой непрерывный сигнал 386 глубины, который имеет по меньшей мере в основном непрерывную величину. В этом случае формирователь канала глубины может быть не нужен, хотя следует понимать, что его работа отражает работу формирователя символьного канала, как описано здесь. Следует понимать, что глубина расположения передатчика может быть определена, на основе сигнала 386 глубины, с использованием хорошо известных дипольных уравнений, как описано, например, в патенте США no, 5,633.589, который включен сюда посредством ссылки. В другом примере выходной сигнал 390 генератора 352 ШИМ-сигнала символьного канала иллюстрирует последовательность выходных символов 392a-392f, частота которых может изменяться от одного символа к следующему. Как будет описано далее, выходной сигнал 390 может содержать поток символов. В рассматриваемом примере между соседними символами нет промежутка нулевой величины, который присутствовал бы между ними первоначально или был бы вставлен накопителем 334 фазы. Таким образом, частота может резко изменяться от одного символа к следующему так, что это может вызвать появление шумов из-за резких скачков частоты. Следует понимать, что формирование символов 392a-392f осуществляется таким образом, чтобы избежать резких скачков частоты посредством того, что эти символы начинаются и заканчиваются на уровне приблизительно нулевой величины. Такое формирование может быть реализовано посредством применения подходящей вырезающей или сужающейся функции посредством формирователя 382 символьного канала, такой как, например, окно Хэмминга, окно Харма, окно Welch или треугольное окно помимо всего прочего. Общим для всех этих вырезающих функций свойством является то, что все они имеют нулевую величину в любой точке вне интервала окна, так что каждый символ начинается и заканчивается нулевой величиной сигнала.
Обратимся теперь к фиг. 5b и таблице 2 в сочетании с фиг. 2, 4 и 5a. Хотя такого обязательного требования нет, различные варианты передатчика 130 могут быть конфигурированы для передачи сигнала 120 глубины и сигнала 122 данных с использованием ряда диапазонов передатчика, в целом обозначенных поз. 400 и протяженных от приблизительно 0 до 45 кГц, как показано на фиг. 5b. Следует понимать, что в других вариантах могут быть использованы другие диапазоны и поддиапазоны передатчика, так что рассматриваемый вариант служит неисчерпывающим примером. Хотя нулевая величина указана в качестве нижнего предела, следует понимать, что фактический нижний предел может быть представлен преобладающими в мире промышленными частотами или какой-то более высокой величиной. Диапазоны передатчика обозначены как BT1-BT5 и также приведены в таблице 2. Хотя структура описания, применяемая на фиг. 5b и таблице 2, использует диапазоны передатчика, которые содержат частотные поддиапазоны, следует понимать, что эта номенклатура диапазонов/поддиапазонов может изменяться каким-либо подходящим образом, например, до тех пор, пока сохраняется необходимое соответствие с последним столбцом таблицы 2, который содержит таблицу 376 множителей. Следует отметить, что величины множителей в таблице 376 множителей в иллюстрируемом варианте постоянно увеличиваются от одного поддиапазона к следующему, что также отражается последовательно возрастающими величинами сигналов 402a-402j поддиапазонов на фиг. 5b. В другом варианте, каждый сигнал 402a-402j поддиапазона может быть представлен отдельной преобразовательной таблицей для создания набора преобразовательных таблиц, вместо использования таблицы множителей с единственной преобразовательной таблицей. В другом варианте, нет необходимости определять частотные диапазоны или поддиапазоны, поскольку множитель может быть специфицирован, например, в виде функции. Как отмечено выше, здесь нет требования обязательно использовать преобразовательную таблицу. Например, в одном из вариантов можно использовать выражение в форме функции, которая является линейной и которая может дать по существу непрерывное изменение величины множителя при разрешении частот передачи в передатчике. Может быть выведена и другая функция, например, с использованием подходящего способа подбора аппроксимирующей кривой, такого, например, как метод наименьших квадратов.
Таблица 2. Диапазоны и поддиапазоны передатчика
sb10
Продолжая рассматривать фиг. 5b, частотный диапазон от 0 до 45 кГц, в соответствии с рассматриваемым вариантом дополнительно разделен на 10 поддиапазонов SB1-SB10, каждый из которых имеет ширину 4,5 кГц. Каждый частотный диапазон выше диапазона BT1 и поддиапазон выше по частоте поддиапазона 1 можно считать содержащим также свою нижнюю границу. Использование диапазонов передатчика, хотя это и не является обязательным требованием, позволяет управлять эффективностью передачи, равно как и мощностью передачи. Хотя каждый из диапазонов BT1 и BT2 передатчика содержит только по одному поддиапазону, следует отметить, что диапазон BT3 передатчика содержит два поддиапазона, SB3 и SB4, а каждый из диапазонов BT4 и BT5 содержит по три поддиапазона: SB5-SB7 и SB8-SB10, соответственно. Один из вариантов передатчика согласно настоящему изобретению может быть конфигурирован для передачи сигнала 120 глубины и сигнала 122 данных в одном поддиапазоне. В другом варианте передатчик может быть конфигурирован для передачи сигнала 120 глубины в диапазоне, отличном от диапазона, используемого для сигнала 122 данных. В этом отношении следует понимать, что использование отдельного канала синтезатора (фиг. 4) для канала глубины создает более высокую гибкость с точки зрения выбора частоты сигнала глубины относительно сигнала данных. В случае широкополосного передатчика, как будет дополнительно описано ниже, передатчик может вести передачи в двух или более диапазонах, так что эти диапазоны могут быть даже разделены другими диапазонами.
В некоторых вариантах передатчик 130 может быть конфигурирован для взаимодействия с антенной 148, так что этот передатчик может осуществлять передачи в широком частотном диапазоне или в диапазоне, протяженном от самой низкой частоты до частоты приблизительно 45 кГц или выше. При таком подходе этот широкий частотный диапазон может быть «закрыт» одним широкополосным передатчиком с использованием одной антенны, поддерживая при этом подходящую эффективность с точки зрения потребления энергии во всем широком частотном диапазоне. Для передачи во всем частотном диапазоне от самой низкой частоты до приблизительно 45 кГц, в качестве неисчерпывающего примера, варианты таблицы 376 множителей могут быть конфигурированы так, чтобы включать любое подходящее число значений. Накопитель 330 фазы канала глубины и накопитель 334 фазы символьного канала могут быть конфигурированы для использования подходящей входной позиции в таблице 376 множителей на основе частоты, которую нужно сформировать. Таким способом можно поддерживать по меньшей мере в основном постоянство потребляемой мощности во всем широком диапазоне передачи независимо от конкретного значения частоты передачи. В известной технике, при постоянных напряжении возбуждения и форме сигнала передатчик в противном случае потреблял бы все большую мощность по мере снижения частоты. В представленных здесь вариантах не требуется возбуждать антенну на резонансной частоте. Эта резонансная частота, представленная индуктивностью антенны 148 в сочетании с любыми паразитными емкостями, в общем случае намного выше наивысшей частоты диапазона передачи, такого как, например, 45 кГц. Например, резонансная частота может находиться в мегагерцовом диапазоне.
В одном из вариантов широкополосного передатчика, группа передаваемых частот может находиться в пределах от поддиапазона SB3 до поддиапазона SB 10, соответствующих широкому частотному диапазону от 9 кГц до 45 кГц. В контексте широкополосного передатчика нет необходимости ограничивать частоту каким-либо одним из этих поддиапазонов (см., например, таблицу 2).
На основе вышеизложенного настоящее изобретение может предложить широкополосный передатчик с одной антенной, возбуждаемой в широком частотном диапазоне, таким образом, что передатчик может поддерживать постоянную или управляемую потребляемую мощность, по меньшей мере в том приближении, в каком в противном случае потребляемая мощность значительно изменялась бы в этом же частотном диапазоне, используя единственную форму драйверного сигнала в сочетании с величиной множителя. Вариации потребляемой мощности в широком частотном диапазоне можно ограничить до приемлемо низких уровней в диапазоне от 9 кГц до 45 кГц. При таком подходе, Заявители смогли создать широкополосный передатчик, работающий в широком частотном диапазоне со стабилизацией и управлением потребляемой мощностью, чего до сих пор не наблюдалось. В прошлом для выполнения подземных работ с использованием разных частот для сигнала глубины и для данных о местонахождении требовалось приобретение своего передатчика, который был бы специально настроен на каждую из интересующих частот. Нововведения, предлагаемые здесь, могут дать в результате значительную экономию затрат, поскольку один широкополосный передатчик может заменить несколько передатчиков, используемых в известных технических решениях. В этом отношении, положения настоящего изобретения в равной степени применимы к передатчику, который передает сигнал или тон глубины на одной дискретной частоте и передает сигнал данных на другой частоте, модулированной каким-либо подходящим способом, таким как, например, с использованием двоичной фазовой манипуляции (BPSK), квадратурной фазовой манипуляции (QPSK) или манчестерского кодирования.
Как обсуждается здесь, Заявители признают, что имеются преимущества, ассоциированные с передачей сигнала глубины или тона на относительно низкой или ультранизкой частоте, такой как, например, 1 кГц или ниже, и передачи символьного сигнала на одной или нескольких более высоких частотах, таких как, например, частоты в диапазоне, простирающемся вверх от частоты 1 кГц или более высокой частоты, например, выше 4.5 кГц. В одном из вариантов передатчик имеет так называемый «арматурный» режим или режим пассивных помех для уменьшения эффектов пассивных помех, сохраняя при этом пропускную способность передачи данных на частотах данных. В этом смысле низкие частоты или тоны сигнала глубины избегают источников пассивных помех, таких как арматура, при появлении риска оказаться под воздействием дополнительных низкочастотных активных помех в отсутствие предлагаемых здесь мер защиты, тогда как более высокие частоты, на которых передают данные, ассоциированы с более высокими уровнями пропускной способности данных на основе частоты Найквиста. Поскольку присутствие, например, арматуры может исказить, ослабить и нарушить форму электромагнитного локационного поля для определения местонахождения передатчика, эти эффекты могут создать трудности для точного определения местонахождения погруженного в землю передатчика, каковое определение опирается на форму локационного поля для определения местонахождения, равно как вызвать неправильное определение показаний глубины, каковое опирается на уровень локационного сигнала. Например, точка на поверхности земли, которая была обозначена как расположенная прямо над передатчиком, может оказаться смещена от своего фактического положения. В качестве другого примера, прохождение под арматурой может вызвать внезапное резкое увеличение представляемых на дисплее показаний глубины передатчика, установленного на погружаемом в землю инструменте, вследствие ослабления сигнала из-за влияния арматуры. Использование относительно низкой частоты для сигнала глубины является выгодным с точки зрения избегания таких эффектов. До настоящего момента преобладала точка зрения, что передача сигнала глубины на описываемых здесь низких частотах, таких как, например, частоты ниже 1 кГц, представляет технические проблемы, казавшиеся в известной технике непреодолимыми из-за отмеченного выше предубеждения, что сигнал глубины на ультранизкой частоте окажется под воздействием настолько сильных активных помех, что это сделает его использование практически неприемлемым. Настоящее изобретение предлагает обойти эти кажущиеся ограничения с использованием ранее неизвестного сочетания признаков.
Настоящее изобретение позволяет передавать тональный сигнал (тон) глубины, удаленный по частоте от частот сигнала данных на такую величину, которая до сих пор не наблюдалась, в частности, когда одна антенна используется для передачи обоих сигналов - и сигнала глубины, и сигнала данных. Например, тональный сигнал глубины можно передавать на частоте 1 кГц или ниже, как это будет пояснено сразу же далее.
Обратимся теперь к фиг. 5c, который представляет схематичную иллюстрацию ряда диапазонов передатчика, обозначенных в целом поз. 420, для варианта с арматурным режимом. Следует отметить, что все значения частот на этом чертеже приведены в кГц. Рассматриваемый вариант также содержит ранее описанные диапазоны BT2-BT3 передатчика, которые были определены в таблице 2 и повторены в таблице 3. В этом варианте совокупность арматурных диапазонов 424 содержит арматурный низкочастотный диапазон (rebar low band, RBL), протяженный от приблизительно 330 Гц до 400 Гц; арматурный среднечастотный диапазон (rebar middle band, RBM), протяженный от приблизительно 405 Гц до 575 Гц; и арматурный высокочастотный диапазон (rebar high band, RBH), протяженный от приблизительно 580 Гц до 750 Гц. Следует отметить, что число арматурных диапазонов и их конечные точки могут варьироваться любым подходящим образом. Например, диапазон RBH может иметь верхний предел в 1 кГц или какую-то другую величину между 1 кГц и нижним пределом диапазона BT2, равным 4.5 кГц, такую как, например, 1.5 кГц. В качестве другого примера диапазон RBL может иметь нижний предел, приближающийся к промышленной частоте. В качестве еще одного другого примера, сверхнизкочастотный диапазон может быть добавлен ниже по частоте диапазона RBL, так что этот новый диапазон может иметь нижний предел, приближающийся к промышленной частоте. В качестве еще одного другого примера, дополнительный диапазон может быть вставлен между диапазонами RBH и BT2. Здесь опять нет необходимости применять подход, специфицирующий множитель по принципу диапазон за диапазоном, до тех пор, пока величина такого множителя специфицирована для любой потенциальной частоты передачи, которая может быть выбрана.
Арматурные диапазоны 424 указаны в таблице 3. Последний столбец в таблице 3 содержит таблицу 410 множителей, представляющую собой вариант, используемый вместо таблицы 376 множителей, входящей в состав таблицы 2, при работе в арматурном режиме. Таблицы множителей могут варьироваться сложными способами на основе разнообразных факторов, как это демонстрирует таблица 410 множителей, составленная эмпирически. Фиг. 5c схематично иллюстрирует синусоидальную преобразовательную таблицу, связанную с таблицей 410 множителей, и имеющую формы сигналов 412a-412c, соответствующие диапазонам RBL, RBM и RBH. Формы сигналов 414a-414c соответствуют поддиапазонам SB2-SB4, соответственно.
Таблица 3. Арматурный режим
Таблица 4 иллюстрирует примеры частот, выбранных на основе сканирования шумов для работы передатчика в арматурном режиме. Следует отметить, что все частоты S0-S15 данных были выбраны из поддиапазона SB4, хотя это не является обязательным требованием. В этом отношении указанные частоты могут быть выбраны по меньшей мере в поддиапазонах SB2-SB4, показанных на фиг. 5c. Следует отметить, что частоты из поддиапазонов SB2-SB4 обычно обеспечивают хорошую дальность передачи при относительно высокой пропускной способности при передаче данных или широкой полосе. В этом отношении, можно выбрать один из поддиапазонов на основе среднего уровня шумов на поддиапазон, определяемого во время сканирования шумов, осуществляемого вручную, автоматически или посредством какого-либо сочетания ручного и автоматического режимов. В то же самое время, частота сигнала глубины, равная 345 Гц, обеспечивает заметный уровень устойчивости к пассивным помехам, таким как, например, появляющихся из-за присутствия арматуры. С учетом таблицы 410 множителей в составе таблицы 3 множитель может быть установлен равным 1,0 для наивысших частот или поддиапазона, который должен быть передан неким конкретным вариантом передатчика. Остальные входные позиции в таблице множителей могут быть заданы, например, для обеспечения постоянства потребляемой мощности на основе мощности, распределяемой между сигналом глубины и частотами сигнала данных, или на основе соображений Заявителей, которые изложены ниже. В одном из вариантов величины в таблице множителей для нормального или арматурного режима могут быть определены эмпирически, например, посредством регулирования мощности передачи сигнала глубины относительно сигнала данных, наблюдая в то же время общую потребляемую мощность передатчика, чтобы не был превышен максимальный уровень мощности. Такую эмпирическую процедуру вероятно лучше всего осуществлять в области, где активные помехи слабы. Конкретный вариант может также учитывать дальность приема сигнала глубины относительно дальности приема сигнала данных, что будет дополнительно обсуждаться ниже.
Таблица 4. Пример выбора частот для арматурного режима
Для целей сравнения, таблица 5 устанавливает частоты, выбираемые для нормального режима, когда частота сигнала глубины выше 1 кГц.
Таблица 5. Пример выбора частот для нормального режима
Частоты, приведенные в таблице 5, выбраны из поддиапазона 10. Заявители понимают, что присутствие активных помех, обнаруженное при сканировании шумов, составляющем основу для выбора этих частот, не имеет отношение к проблеме пассивных помех. В этом отношении попытки использовать частоту сигнала глубины из таблицы 5 могут оказаться непригодными для исполнения, что ведет к необходимости переключиться в арматурный режим, использующий намного более низкую частоту для сигнала глубины, такую как, например, 345 КГц, как это видно из таблицы 4. В другом варианте выбор частот для сигнала глубины и символов данных в нормальном режиме может быть ограничен тем же самым частотным диапазоном, как и выбор частоты для символов данных для арматурного режима (SB-2 - SB-4 в примере, приведенном в таблице 3). Следует отметить, что в таком варианте дальность приема частот сигнала данных при конкретной мощности передачи может быть по меньшей мере в некоторой степени улучшена в нормальном режиме по сравнению с дальностью приема сигнала данных в арматурном режиме по меньшей мере в результате признания относительно меньших активных помех в нормальном режиме за счет фильтрации на входе, как еще будет обсуждаться.
В результате прочтения приведенного выше подробного описания передатчиков и ассоциированных компонентов согласно настоящему изобретении станут понятны детали относительно передачи сигнала 122 данных. В частности, здесь используется способ M-уровневой частотной манипуляции, так что несколько разных символов могут быть объединены в одном потоке в качестве сигнала 122 данных. В арматурном режиме, частоты для символов данных могут быть выбраны в диапазоне BT2 и/или BT3 для построения сигнала 122 данных, тогда как частоту сигнала 120 глубины можно выбрать в группе арматурных диапазонов 424 (фиг. 5c), на основе сканирования шумов, как еще будет описано. В нормальном или в арматурном режиме, сигнал данных может служить для передачи потока многобитовых символов. Возможности передавать поток многобитовых символов способствует, по меньшей мере частично, использование синтезатора 300, показанного на фиг. 4. В частности, поток многобитовых символов данных может поступать на вход 374 потока символов данных в модуль 340 управления частотой символьного канала. При таком подходе символы данных, соответствующие широкому разнообразию дискретных частот, могут быть специфицированы в качестве части потока символов данных, где каждый из различных символов соответствует своей, отличной от других символов частоте. В одном из вариантов символы данных в составе потока символов могут соответствовать 16 символам (4 бит), хотя здесь можно использовать любое подходящее число символов на основе желаемой пропускной способности при передаче данных. Фиг. 4 иллюстрирует выходной сигнал 390 на основе 16 символов, частоты S0-S15, где S0 соответствует самой низкой частоте, а каждый из последующих символов с последовательно возрастающими номерами соответствует относительно более высокой частоте. Хотя это и не является обязательным требованием, так что отображение или назначение символов на частоты может быть осуществлено любым подходящим способом. Таким образом, выходной сигнал 390 соответствует примеру входного потока символов - S2, S12, S2, S15, S0 и S10 на входе 374.
На основе вышеизложенного Заявители утверждают, что система 10 может обеспечить такой уровень устойчивости к активным шумам и устойчивости к пассивным помехам, какой до настоящего времени не был достигнут при выполнении подземных работ, таких как, например, горизонтальное направленное бурение и связанные с ним операции обратного вытягивания или обратной проработки скважины. Относящиеся к делу соображения и другие подробности будут приведены в контексте обсуждения устройства 20, которое принимает сигнал глубины и сигнал данных и которое также может помогать в идентификации частоты сигнала глубины и частот символов, какие должны быть использованы передатчиком. Следует понимать, что упорядочение частот символов, приведенное в таблице 4, не является обязательным требованием. В таблице 5 частота сигнала глубины может быть расположена между частотами символов. Благодаря использованию отдельного канала для генерации сигнала глубины (фиг. 4), этот сигнал глубины может располагаться в поддиапазоне, отличном от поддиапазона, где находятся частоты символов. Далее, частоты символов могут быть переупорядочены или переставлены каким-либо подходящим способом. В отношении ограничения выбора частоты одним поддиапазоном следует понимать, что один из вариантов широкополосного передатчика может быть конфигурирован таким образом, чтобы имитировать работу передатчика, возможности которого ограничены в зависимости от поддиапазонов. Например, выбранные частоты широкополосного передатчика могут быть ограничены единственным поддиапазоном, даже если широкополосный передатчик способен вести передачи в широкой полосе поддиапазонов.
На фиг. 6a представлен график спектральной плотности мощности шумов, измеренной с высоким разрешением. График обозначен в целом поз. 500 и соответствует фактическому физическому расположению в местности, где используется промышленная частота 50 Гц. Уровень сигнала представлен на вертикальной оси, а частота показана на горизонтальной оси. Частотный диапазон от 0 до 45 кГц соответствует частотному диапазону, охватываемому совокупностью передатчиков, описываемых согласно настоящему изобретению. На графике обозначены также поддиапазоны SB 1-SB 10 передатчика. Интересно отметить, что поддиапазон 1 оказался сильно зашумленным по сравнению с уровнем шумов, наблюдаемых в большинстве более высокочастотных поддиапазонов. Вследствие этого, можно утверждать, что рядовой специалист в рассматриваемой области должен был бы отказаться от идеи использовать сигнал глубины с частотой ниже 1 кГц или 1.5 кГц по меньшей мере по этой причине, как будет обсуждаться далее. Заявители, однако, выявили значительные усовершенствования, которые позволят точно позиционировать сигнал глубины в области низкочастотных активных шумов на частоте, которая может быть даже ниже 1 кГц.
Хотя результат спектрального сканирования, показанный на фиг. 6a, иллюстрирует спектральную информацию по существу в одном месте, следует понимать, что такая спектральная информация может быть собрана кумулятивно. Например, спектральное сканирование можно осуществлять, когда оператор идет вдоль планируемой трассы скважины с устройством 20, которое в это время измеряет характеристики шумовой среды. При таком подходе можно считать, что спектральный график, показанный на фиг. 6a, представляет шумовую среду вдоль всей планируемой трассы скважины, а последующий выбор частот должен быть основан на шумовой среде, характеристики которой сняты по всей длине планируемой трассе скважины, в то же время по-прежнему используя способы выбора частоты, описанные здесь.
Фиг. 6b иллюстрирует один из вариантов скриншота, показывающего экран дисплея 36, на котором представлена столбчатая диаграмма, иллюстрирующая средний уровень шума в каждом поддиапазоне при работе в нормальном режиме, где поддиапазон SB-10 выделен, например, с использованием штриховки и/или цвета, либо каким-либо другим подходящим способом, чтобы указать, что этот поддиапазон SB-10 был выбран автоматически. В другом варианте локатор может выдать автоматические рекомендации на основе среднего уровня шумов в поддиапазоне в сочетании с другими статистическими характеристиками. В качестве таких подходящих статистических характеристик можно использовать, например, стандартное отклонение, минимальный уровень шума и пиковый уровень шума. Еще в одном другом варианте могут быть рекомендованы больше одного поддиапазона, в каком случае пользователь может выбрать между рекомендованными поддиапазонами. Рекомендация нескольких поддиапазонов может быть основана на ограниченном объеме статистических вариаций между поддиапазонами. Например, оба поддиапазона 9 и 10 могут быть рекомендованы на основе относительно ограниченной разницы между этими двумя поддиапазонами, как видно на фиг. 6b. В качестве другого примера несколько поддиапазонов могут быть рекомендованы одновременно на основе, например, того, что средний уровень шума в первом поддиапазоне ниже среднего уровня шума во втором поддиапазоне, тогда как пиковый уровень шума в первом поддиапазоне выше пикового уровня шума во втором поддиапазоне. В одном из вариантов, когда рекомендуется больше одного поддиапазона, система может быть конфигурирована таким образом, чтобы пользователь мог выбрать один из нескольких рекомендованных ему поддиапазонов для передачи. В другом варианте пользователь может выбрать несколько рекомендованных поддиапазонов для передачи. Еще в одном другом варианте для передачи могут быть автоматически выбраны один или более из таких нескольких рекомендованных поддиапазонов. Поскольку информация, представленная на фиг. 6a, основана на сканировании шумов с высоким разрешением с использованием шага 5 Гц по частоте, из этих данных может быть извлечен значительный объем информации о шумах. Например, может быть определено стандартное отклонение величин шумов в каждом поддиапазоне. Высоты различных столбиков на фиг. 6b могут быть взвешены путем добавления или вычитания некоторой величины на основе одного или нескольких других статистических параметров. Например, если стандартное отклонение для какого-то конкретного диапазона велико, что означает относительно более широкий разброс шумовых значений в этом поддиапазоне, можно поддерживать прежнюю высоту ассоциированного столбика или даже увеличить ее на некоторую величину. С другой стороны, если стандартное отклонение для какого-то конкретного диапазона мало, что означает относительное соответствие шумовых значений в пределах этого поддиапазона, высоту ассоциированного с этим поддиапазоном столбика на фиг. 6b можно уменьшить. Аналогично высоты столбиков в составе столбчатой диаграммы могут быть взвешены на основе пикового уровня шума, так что высота столбика для каждого поддиапазона, имеющего высокий пиковый уровень шума, может быть увеличена на некоторую величину. В любом случае взвешивание может быть произведено на основе пороговых величин для соответствующих статистических параметров. Взвешивание может быть произведено на основе индивидуальных статистических параметров или сочетаний статистических параметров. Автоматический выбор поддиапазона может быть принят оператором, прикоснувшимся к кнопке 780 «Автоматический выбор» (Auto-Select), или посредством прикосновения к любому диапазону, который оператор хочет выбрать. Оператор может преодолеть автоматический выбор, например, на основе того, какие конкретно передатчики доступны в текущий момент для проведения подземных работ. В качестве другого основания для представления оператору, ему могут быть показаны другие статистические параметры. Например, расположенные над столбиками штрихи 781 (число которых назначается индивидуально) показывают пиковые уровни шумов в соответствующих поддиапазонах. Оператор может принять решение отказаться от использования поддиапазона, в котором имеет место особенно высокий пиковый уровень шума, даже если средний уровень шума в этом поддиапазоне относительно мал. Для преодоления автоматического выбора оператор может прикоснуться к кнопке 782 «Ручной выбор» (Manual Select) и затем прикоснуться к поддиапазону, который он хочет выбрать. В другом варианте дисплей 36 локатора может показать на экране график, столбчатую диаграмму или в какой-либо другой подходящей форме представление шумов, выведенное из результатов спектрального сканирования, показанных на фиг. 6a, так что оператор тогда получает возможность вручную выбрать один из поддиапазонов, например, путем прикосновения к выбранному поддиапазону на экране дисплея. Еще в одном другом варианте локатор 20 может позволить оператору первоначально ввести информацию относительно доступных передатчиков с целью обеспечить возможность автоматического выбора поддиапазона, охватываемого одним из этих передатчиков, исключив при этим недоступные поддиапазоны, способом, согласованным с положениями патента США no. 8,729,901, который является совместным патентом с настоящей заявкой и настоящим включен сюда посредством ссылки во всей своей полноте. Фиг. 6b показывает поддиапазоны, которые оказались недоступны из-за недоступности передатчиков, с использованием штриховых линий. Напротив, сплошные линии обозначают доступные поддиапазоны. В рассматриваемом примере поддиапазоны SB-1 и с SB-5 по SB-7 недоступны. В одном из вариантов поддиапазоны могут быть исключены на основе нормативных ограничений. При таком подходе самому портативному устройству и оператору не разрешено сделать выбор частот, который бы нарушил нормативные положения, действующие в конкретной юрисдикции. Такие частотные ограничения могут быть заданы изготовителем на региональной основе. В одном из вариантов портативное устройство 20 или некоторые другие компоненты системы, такие как, например, буровой станок 80, могут быть оснащены GPS-приемником, который может определить местонахождение подземных работ и затем просмотреть местные требования к использованию частот.
Продолжая рассматривать фиг. 6b, показанный здесь экран дисплея может оставаться «живым» по меньшей мере до тех пор, пока не завершится процедура выбора частоты. Иными словами, можно осуществлять мониторинг и представлять на дисплее средний уровень шумов для каждого рассматриваемого поддиапазона, либо по отдельности, либо во взвешенном с использованием других статистических параметров виде, в реальном времени, чтобы оператор мог осуществлять мониторинг. При таком подходе оператор может перемещать локатор, наблюдая при этом средний уровень шума в различных поддиапазонах. Например, оператор может пройти вдоль планируемой трассы скважины и проконтролировать шумы вдоль трассы, прежде чем приступить к бурению. При таком подходе поддиапазонов, особенно сильно зашумленных в одном или нескольких пунктах вдоль трассы, можно избежать. Если оператор примет решение, он может переместить локатор в какой-либо другой пункт, например, вдоль трассы и инициировать повторное сканирование шумов по всей ширине полосы частот посредством выбора кнопки 784 повторного сканирования. Как обсуждается выше, шумовая среда может быть охарактеризована на основе приема с использованием одной или более антенн. Оператор может изменять режим приема с использованием кнопки 786. Например, в одном из режимов приема столбчатая диаграмма, показанная на фиг. 6b, может быть представлена на основе приема вдоль одной оси, такой как, например, ось X. В другом режиме приема столбчатая диаграмма может быть представлена на основе векторной суммы, сформированной по трем ортогональным осям приема. Кнопка 786 может быть также использована для инициирования арматурного режима и/или переключения между арматурным и нормальным режимами. При этом вид экрана дисплея 36 может изменяться, как это будет видно в соответствующий момент в дальнейшем. Когда оператор сменит режимы приема, кнопка 784 повторного сканирования может инициировать новое сканирование шумов и представить значения шумов на основе выбранного режима приема. Оператор может переключаться между различными режимами сканирования шумов по своему желанию. В одном из вариантов сканирование шумов, составляющее основу для вида экрана дисплея, показанного на фиг. 6b, может представлять собой сканирование с высоким разрешением. В сочетании со сканированием шумов можно автоматически выбрать ряд оптимизированных частот с низким уровнем шумов на основе нужного числа частот символов. Например, в каждом поддиапазоне выбрать шестнадцать частот символов и частоту сигнала глубины. В одном из вариантов в ходе представления шумов в реальном времени на экране, показанном на фиг. 6b, уровень шумов в каждом поддиапазоне может быть представлен в виде средней величины значений шумов, измеренных на каждой из выбранных частот в пределах каждого поддиапазона. Следует отметить, что выбор кнопки 784 повторного сканирования вызывает новый или обновленный выбор частот в каждом поддиапазоне. Локатор 20 может быть конфигурирован для сохранения наборов выбранных частот, ассоциированных с различными позициями, где выполняются измерения, например, в запоминающем устройстве 714, показанном на фиг. 9a. Соответственно, наборы выбранных частот оптимизированы для каждой позиции, где выполняются измерения, так что различные наборы выбранных частот могут быть использованы в разные моменты времени во время работы. Термин «оптимизированы» должен означать, что частоты выбирают с целью избежать помех на основе одного или нескольких статистических параметров, таких как, например, средний уровень шума, стандартное отклонение и пиковый уровень шума. Наборы выбранных частот могут быть сообщены передатчику, например, над землей с использованием внешнего соединения 174 связи, показанного на фиг. 3. Погружаемый в землю передатчик может получать команды каким-либо подходящим способом для переключения на другой набор выбранных частот в ходе подземных работ. Например, команда на переключение между арматурным и нормальным режимами может быть передана на основе заданной последовательности вращения бурильной колонны или путем передачи электромагнитного сигнала от находящегося над землей устройства для приема передатчиком 130, который в этом случае должен быть конфигурирован в качестве приемопередатчика. Некоторые варианты могут использовать бурильную колонну в качестве электрического проводника или могут использовать хорошо известную конструкцию типа провод-в-трубе, так что можно передавать данные между погруженным в землю передатчиком/приемопередатчиком и буровым станком. Например, буровой станок может передать команду через бурильную колонну для переключения между арматурным и нормальным режимами. Один из вариантов для первоначального установления работы либо в арматурном, либо в нормальном режиме основан на ориентации передатчика в момент запуска, когда вставлены аккумуляторы. Например, один конец передатчика может быть ориентирован вверх для установления нормального режима работы, тогда как ориентация этого же самого конца вниз устанавливает арматурный режим.
Фиг. 6c иллюстрирует один из вариантов скриншота, показывающего экран дисплея 36, содержащий столбчатую диаграмму, представляющую результаты измерения шумов для работы в арматурном режиме, где поддиапазон SB-4 выделен, например, с использованием штриховки и/или цвета, либо каким-либо другим подходящим способом, для указания, что этот поддиапазон SB-4 был автоматически выбран для целей передачи данных. В то же самое время, столбики 790, 792 и 794 ассоциированы с арматурными диапазонами RBL, RBM и RBH, соответственно. В этом примере высота каждого столбика для арматурных диапазонов показывает измеренный уровень активных шумов для частоты с самым низким уровнем шумов, которая может также называться потенциальной частотой сигнала глубины и которая была обнаружена путем сканирования в каждом арматурном диапазоне, тогда как столбцы для поддиапазонов с SB-2 по SB-4 могут обозначать среднюю величину для частот символов данных в каждом поддиапазоне, как обсуждается выше. Перекрестная штриховка или некоторые другие подходящие способы визуального выделения могут указывать автоматический выбор или рекомендацию частоты с самым низким уровнем шумов в арматурных диапазонах, которым в рассматриваемом примере является диапазон RBM, хотя это и не является обязательным требованием. Оператор может выбрать, преодолеть или изменить выбранную арматурную частоту, например, посредством прикосновения к столбцу поддиапазона. Следует понимать, что для генерации обоих экранов, показанных на фиг. 6b и 6c, может быть использовано одно сканирование шумов во всей полосе, хотя это и не является обязательным требованием. После такого сканирования шумов экран дисплея, показанный на фиг. 6c может представить указание шумов в реальном времени для каждого из арматурных диапазонов, так что, например, оператор может пройти вдоль намеченной трассы бурения, осуществляя при этом мониторинг вариаций шумов вдоль трассы. В другом варианте, можно передавать несколько частот сигнала глубины. Например, сигнал выбранной частоты для каждого из арматурных диапазонов RBL, RBM и RBH может быть передан в последовательности интервалов для приема над землей. Следует понимать, что такая совокупность частот может быть выбрана и в нормальном режиме, и сигналы с этими частотами могут быть переданы аналогичным образом. Прием сигналов на частотах сигналов глубины будет обсуждаться в соответствующий момент далее.
На фиг. 7 представлено дополнительно увеличенное изображение поддиапазона 10, показанного на фиг. 6a, где это изображение обозначено в целом поз. 550 и приведено здесь для иллюстрации выбора частоты сигнала глубины и шестнадцати частот символов S0-S15 в этом поддиапазоне для нормального режима. Следует отметить, что выбор частот символов для передачи данных в арматурном режиме может быть произведен подобным образом на основе сканирования шумов в доступном частотном диапазоне для передачи данных (поддиапазоны с SB- 2 по SB-4, показанные на фиг. 5c), тогда как частоту арматурного сигнала глубины выбирают отдельно из совокупности арматурных диапазонов 424, как показано на фиг. 6c. На фиг. 7 каждая из выбранных частот обозначена стрелкой. Различные частоты были выбраны, например, на основе их соответствия точкам с низким уровнем шумов на графике шумов. На основе выбора частот, таких как частоты S0-S15, автоматически и/или вручную, Заявители утверждают, что система 10 может обеспечить такой уровень устойчивости против шумов, какой до сих пор не был достижим при проведении подземных работ, таких как, например, горизонтальное направленное бурение и связанные с этим операции обратного вытягивания и обратной проработки скважины. Утверждается также, что описываемый здесь арматурный режим предоставляет невиданные доселе возможности с точки зрения устойчивости к пассивным помехам. Соответствующие соображения и другие подробности будут далее изложены в контексте обсуждения устройства 20, которое принимает сигнал глубины и сигнал данных и которое также помогает в идентификации частоты сигнала глубины и частот символов, какие должны быть использованы передатчиком.
На фиг. 8 представлена логическая схема, иллюстрирующая один из вариантов работы передатчика, обозначенный в целом как поз. 600, согласно настоящему изобретению. Следует отметить, что для целей настоящего описания будет предполагаться, что частота сигнала глубины, равно как частоты S0-S15, ассоциированные с символами, уже были выбраны для каждого - как нормального, так и арматурного, режима. Эти выбранные частоты могут быть сохранены в каком-либо подходящем месте, таком как, например, таблица 224 частот сигнала глубины и таблица 228 частот символов, показанные на фиг. 3. Выполнение способа начинается с этапа 602 и переходит к этапу 604 для выбора либо нормального режима, либо арматурного режима каким-либо подходящим способом. На этапе 606 считывают множитель глубины. На этапе 608 передатчик находит приращение (шаг) частоты сигнала глубины, например, из преобразовательной таблицы 370 приращений (фиг. 4) в качестве части работы модуля 338 управления частотой канала глубины. В одном из вариантов, использующем единственную преобразовательную таблицу формы сигнала в канале глубины, такую как таблица 326, показанная на фиг. 4, накопитель 330 фазы канала глубины всегда может обратиться к этой единственной преобразовательной таблице для формы сигнала в сочетании с вызовом соответствующей величины множителя из таблицы множителей (например, таблицы 376 или 410 множителей). С другой стороны, в одном из вариантов, использующем несколько преобразовательных таблиц для формы сигнала глубины, на этапе 608 можно также идентифицировать правильную преобразовательную таблицу для формы сигнала, так что накопитель 330 фазы канала глубины обращается к подходящей преобразовательной таблице формы сигнала в канале глубины на основе частоты. На этапе 610 накопитель 330 фазы канала глубины начинает подсчет на основе приращения частоты сигнала глубины, так что преобразовательная таблица 326 и генератор 350 ШИМ-сигнала канала глубины начинают непрерывно генерировать сигнал 386 с частотой канала глубины для излучения сигнала 120 глубины с этой частотой, в соответствии с величиной множителя. На этапе 614 процессор CPU 200 считывает информацию датчика через мультиплексор 154 для сбора данных датчика, которые нужно передать. На этапе 618 процессор CPU собирает из данных датчика поток символов, который может использовать пакетную структуру, какая еще будет описана. Этот поток символов поступает на вход 374 для потока символов данных модуля 340 управления частотой символьного канала, как показано на фиг. 4. На этапе 619 может быть прочитан множитель (и) частоты сигнала глубины. На этапе 620 модуль управления частотой символьного канала может использовать преобразовательную таблицу 326 для идентификации соответствующей частоты для текущего символа, который нужно передать, равно как величины множителя (например, по таблице 376 или 410 множителей). С другой стороны, в варианте, использующем несколько преобразовательных таблиц формы сигналов символов, на этапе 620 возможна также идентификация правильной преобразовательной таблицы формы сигнала, так что накопитель 334 фазы символьного канала обращается к соответствующей преобразовательной таблице формы сигнала в символьном канале. Следует понимать, что для передачи какого-либо конкретного потока символов может потребоваться, чтобы на этапе 620 переключение величин множителя происходило на основе принципа символ за символом от одного символа к следующему на основе частоты. На этапе 624 передают текущий символ. На этапе 626 проверяют наличие и доступность другого символа для передачи. Если символ имеется и доступен, работа возвращается к этапу 620, так что процедура повторяется для следующего символа. С другой стороны, если следующий символ еще не готов, операция может перейти к этапу 630, который отвечает на запрос с требованием переключиться из одного - нормального или арматурного, режима в другой, соответственно арматурный или нормальный режим. Этот запрос может быть передан любым подходящим способом, например, на основе последовательности ориентации поворота, передачи данных через бурильную колонну или радиосвязи. Если такого запроса нет, работа может вернуться к этапу 610, который продолжает передачу сигнала глубины. На этапе 614 снова считывают данные датчика, и процедура продолжается с этого момента. С другой стороны, если имеется запрос с требованием переключения диапазонов, работа возвращается к этапу 606 и продолжается уже от этого момента. Следует понимать, что сигнал 122 данных наиболее часто передают по существу, на непрерывной основе одновременно с сигналом 120 глубины.
Имея подробное описание вариантов передатчика 130 выше, обратимся теперь к фиг. 9a-9c в сочетании с фиг. 1 с целью описания дополнительных подробностей относительно устройства 20, которое можно взаимозаменяемо называть локатором или приемником. На фиг. 9a представлена блок-схема, иллюстрирующая устройство 20. Последнее содержит аккумулятор 700, который питает источник 704 питания, передающий всем компонентам устройства соответствующее электрическое напряжение питания, обозначенное как V+. Электронная секция 32 содержит процессор 710, сопряженный с запоминающим устройством 714. Управляемая процессором телеметрическая секция 720 соединена с антенной 40 для двусторонней связи посредством сигнала 44. В некоторых вариантах канал телеметрии может быть однонаправленным от устройства 20 к буровому станку, в каком случае приемопередатчик 102 нуждается только в функциональных возможностях приемника. Внешняя схема 722 связи обеспечивает внешнюю связь с передатчиком с использованием внешнего соединения 174 связи (фиг. 3) передатчика. Как обсуждается выше, такая связь не требует передачи сквозь землю, а может осуществляться, когда передатчик находится над землей, например, в позиции рядом с устройством 20. Такая внешняя связь может быть реализована каким-либо подходящим способом, включая, без ограничений, системы, использующие стандарты IrDA, NFC, WiFi, Zigbee или Bluetooth. Имеющий два режима широкополосный входной блок 730 конфигурирован для приема сигнала 120 глубины и сигнала 122 данных с использованием антенн X, Y и Z, составляющих антенный кластер 26 для измерения трех ортогональных составляющих рассматриваемых сигналов, равно как для осуществления измерения шумов вдоль этих трех осей, как еще будет описано далее. Дополнительные подробности относительно одного из вариантов антенного кластера будут приведены в соответствующем месте в дальнейшем. Каждая из антенн X, Y и Z сопряжена со своим малошумящим усилителем (МШУ (low noise amplifier (LNA))) 734a, 734b и 734c, соответственно, где все эти усилители конфигурированы идентично. Усиленный выходной сигнал каждого МШУ поступает в соответствующую секцию 738a, 738b и 738c переключаемого фильтра, где все эти три секции конфигурированы одинаково и могут совместно называться фильтрующими секциями 738. Каждая фильтрующая секция содержит два полосно-пропускающих фильтра 740a и 740b, имеющих спад или излом амплитудно-частотной характеристики на низкочастотной стороне и спад или излом такой характеристики на высокочастотной стороне. Фильтры 740a могут называться фильтрами для нормального режима, тогда как фильтры 740b могут называться фильтрами для арматурного режима. Хотя фильтры 740a и 740b показаны в виде индивидуальных функциональных блоков, следует понимать, что эти фильтры могут быть реализованы любым подходящим способом. В качестве неисчерпывающего примера каждый фильтр может быть реализован в виде последовательности RC фильтров верхних частот и нижних частот, распределенных по сигнальной цепочке. Нормированная частотная характеристика фильтра 740a для нормального режима схематично показана графиком 742 на фиг. 9b. В варианте фильтра для нормального режима два фильтра верхних частот могут иметь каждый частоту низкочастотного излома характеристики около 4 кГц, а четыре фильтра нижних частот могут иметь каждый частоту высокочастотного излома характеристики около 90 кГц. Этот вариант дает относительно равномерную частотную характеристику с частотой 742a низкочастотного излома около 10 кГц и частотой высокочастотного излома около 50 кГц. Крутизна спада характеристики ниже 10 кГц составляет примерно 40 дБ затухания на декаду, а крутизна спада характеристики выше 50 кГц составляет приблизительно 80 дБ затухания на декаду. Фиг. 9c схематично иллюстрирует вариант нормированной частотной характеристики фильтра 740c для арматурного режима, обозначенный поз. 744. Частота 743b высокочастотного излома может оставаться неизменной, как это показано, хотя это и не является обязательным требованием. С другой стороны, частота 745 низкочастотного излома может быть смещена вниз по оси частот, например, до примерно 180 Гц при спаде примерно 3 дБ. При таком подходе имеет место небольшое затухание сигнала на частоте 300 Гц. Следует понимать, что низкочастотный край характеристики фильтров 740a и 740b может быть установлен с учетом основной гармоники напряжения сети переменного тока и гармоник низшего порядка этого напряжения, которые могут быть очень сильными особенно в случае фильтра для арматурного режима. Линия 747 управления переключением фильтров показана в виде пунктирной линии, проходящей от процессора CPU 710 к каждому из фильтров в составе фильтрующей секции 738. Соответственно, процессор CPU 710 может управлять выбором фильтров и в нормальном, и в арматурном режимах. После каждого из фильтров 738a-738c может быть установлен свой усилитель 750a-750c с достаточным коэффициентом для обеспечения нормальной работы аналого-цифровых преобразователей (АЦП (analog-to-digital converter (A/D))) 754a-754c. Каждый АЦП 754 передает свой выходной сигнала процессору CPU 710. В одном из вариантов устройство 20 может быть конфигурировано для приема потока символов таким образом, чтобы подавить гармоники промышленной частоты, поскольку в потоке символов эффективно нет энергии на частотах этих гармоник промышленной частоты. Например, принятый сигнал может быть обработан таким способом, чтобы характеристика приемника была согласована со спектрами символов, как показывает график 553 на фиг. 7. В частности, спектральная характеристика приемника может быть согласована со спектральной характеристикой передатчика путем интегрирования принятого потока символов на периоде времени, соответствующем продолжительности во времени или периоду каждого символа. При таком подходе частотная характеристика приемника будет согласована с характеристикой передатчика в том смысле, что она будет иметь точки нулевого приема на частотах гармоник промышленной частоты. Соответственно, приемник подавляет или игнорирует энергию на частотах гармоник, в то же время резко усиливая энергию спектральных составляющих, ассоциированных с символом. Приемник может использовать любую подходящую процедуру демодуляции, создающую периодические нулю, включая, но не ограничиваясь, дискретное преобразование Фурье (Discreet Fourier Transform (DFT)).
Обращаясь к фиг. 9b и 9c, было бы целесообразно в этот момент сравнить характеристику 742 фильтра для нормального режима и характеристику 744 фильтра для арматурного режима с учетом спектрального графика, представленного на фиг. 6a, и с учетом приведенных выше рассуждений относительно сильных активных шумов на низких частотах, ниже того, что Заявители называют диапазоном ультранизких частот сигнала глубины, таких как, например, частоты ниже 1 кГц. В этом смысле низкочастотный изгиб 743a характеристики фильтра для нормального режима располагается на частоте приблизительно 4 кГц, тогда как низкочастотный изгиб 745 характеристики фильтра для арматурного режима находится на частоте не выше чем приблизительно 180 Гц. Хотя снижение частоты низкочастотного изгиба характеристики фильтра для арматурного режима позволяет измерять сигнал глубины на очень низких частотах по меньшей мере вплоть до 300 Гц или даже до соответствующей промышленной частоты, следует понимать, что одновременно возникает серьезная техническая проблема. В частности, и как видно на фиг. 6a, фильтр для арматурного режима пропускает большую долю шумов в диапазоне между 180 Гц (или даже ниже) и 4 кГц, которые (шумы) обычно отсекает фильтр для нормального режима. Эти шумы могут содержать, например, очень сильные гармоники промышленной частоты. Утверждается, что прием всех этих шумов мог бы показаться нелогичным рядовому специалисту в рассматриваемой области и мог бы рассматриваться как вероятность того, что портативное устройство окажется неспособным принимать такие низкочастотные сигналы глубины, равно как это создаст дополнительные трудности в отношении приема более высоких частот. Заявители, однако, сознают, что сочетание положений настоящего изобретения предполагает пропускание таких дополнительных шумов, чтобы позволить принимать очень низкочастотные сигналы глубины, и в это же время оно предоставляет способность позиционировать сигнал глубины на прецизионной частоте в диапазоне арматурного режима, на которой могут отсутствовать шумы по меньшей мере в разумном приближении. При таком подходе сигнал глубины можно принимать с некой гарантией защищенности от воздействия высоких в общем случае уровней окружающих шумов на частотах ниже 1 кГц или некоторого другого подходящего предела, такого как, например, 1.5 кГц. Заявители не осведомлены о каких-либо предложениях этого сочетания признаков в известной технике.
В соответствии с фиг. 9a и с приведенным выше подробным описанием локатора 20, следует понимать, что этот локатор может быть конфигурирован для осуществления измерений и анализа шумов с целью выбора передатчика для передачи сигнала глубины и сигнала данных, равно как для установления частот, которые следует ассоциировать с каждым из этих сигналов. Безусловно, выбор диапазона может не потребоваться, если используется широкополосный передатчик. Измерения шумов могут быть определены на основе каждой из ортогональных осей антенны 26 (антенны X, Y и Z, как показано на фиг. 9a). Эти индивидуальные шумовые составляющие могут быть использованы для установления величины трехмерного шума, например, на основе векторной суммы составляющих от трех антенн. Эта векторная сумма может быть полезной, поскольку показания шумов в конкретной точке будут по существу инвариантны относительно изменений ориентации локатора. С другой стороны, представление на дисплее показаний шумов, полученных от одной оси, будут в общем случае изменяться в произвольной конкретной точке при изменении ориентации локатора. Разрешив мониторинг шумов вдоль одной оси антенны, например, оси X, оператор сможет идентифицировать, какая конкретная ось вдоль трассы скважины может быть проблематичной с точки зрения помех. Величины шумов могут быть определены любым подходящим способом, таким как, например, на основе быстрого преобразования Фурье (БПФ (Fast Fourier Transform (FFT))). В одном из вариантов сканирование шумов может быть произведено вдоль каждой оси для целей сравнения. Например, например, сигнал от оси, где отмечаются относительно более сильные шумы, чем от других осей, можно обрабатывать по-другому для целей извлечения данных.
Обратимся теперь к фиг. 10a, где представлен растянутый вид поддиапазона 6, показанного на фиг. 6a, этот вид в целом обозначен поз. 800. Для целей настоящего обсуждения предположим, что поддиапазон SB-6 доступен и был выбран либо автоматически, либо оператором для использования при проведении подземных работ. Следует отметить, что выбор частоты символов/данных может осуществляться для любого поддиапазона в соответствии с этими описаниями. Предполагается, что по меньшей мере первоначально работа производится в нормальном режиме. Имея выбранный поддиапазон, можно установить частоты для сигнала 120 глубины и сигнала 122 данных. В одном из вариантов эти частоты могут быть заданы заранее, например, изготовителем или на основе предшествующего сканирования шумов, как описано выше. В другом варианте дисплей 36 может быть использован для представления спектрального графика для поддиапазона, показанного на фиг. 10a, в какой-либо подходящей форме, оператору локатора, так что оператор может выбрать частоты. Фиг. 10b иллюстрирует один из вариантов скриншота, показывающего вид экрана дисплея 36, представляющего поддиапазон SB-6, по-прежнему в предположении нормального режима. Должно быть понятно, что локатор может осуществлять функцию изменения размера изображения на экране дисплея 36, которая использует кнопку 802 увеличения (Zoom In) и кнопку 804 уменьшения (Zoom Out), так что оператор может растянуть изображение спектра в горизонтальном направлении для осуществления более детального выбора частоты. Обычно оператор может выбрать частоты, соответствующие точкам с низким уровнем шума, в представленном на экране дисплея спектре. Результаты выбора частот могут быть округлены для отражения разрешения по частоте передатчика, который должен быть использован. Как обсуждается выше, варианты передатчиков согласно настоящему изобретению могут иметь разрешение по частоте 5 Гц в качестве неисчерпывающего примера. На фиг. 10a идентифицированы двадцать одна точка, которым соответствуют низкие шумы, так что эти точки обозначены вертикальными метками (a)-(u). В одном из вариантов, где применяются одна частота для сигнала 120 глубины и 16 частот символов, могут быть использованы семнадцать из этих 21 частот. Как описано выше, частота сигнала глубины может быть расположена в любом месте в пределах поддиапазона, вперемешку с частотами символов, на любом конце поддиапазона или даже в другом диапазоне. В качестве одного из примеров частота сигнала глубины может быть выбрана в точке, которой соответствует самый низкий уровень шума среди идентифицированных частот, в рассматриваемом примере это частота (j). Еще в одном другом варианте частоты можно выбирать или повторно выбирать автоматически посредством локатора 20, например, в ответ на нажатие оператором кнопки 806 авто-выбор (“Auto-Pick”) на экране дисплея 36. В одном из вариантов процессор 710 может исследовать спектр, показанный на фиг. 6a, для идентификации точек с самым низким уровнем шума до тех пор, пока не будет набрано подходящее число частот символов. В других вариантах процессор может выполнять процедуру выбора на основе какого-либо подходящего способа. Например, частоты с самым низким уровнем шума можно выбирать в сочетании с условием поддержания некоторого минимального разнесения между соседними частотами. В отношении арматурного режима процедура выбора частоты может содержать процедуру выбора частот для символов данных, которые могут быть по существу идентичны тем, что показаны на фиг. 10b, и дополнительную процедуру выбора частоты сигнала глубины, например, в группе арматурных диапазонов 424, которая (процедура выбора) может быть основана на представлении арматурных диапазонов 424 на дисплее, как это показано на фиг. 6c, или на представлении на дисплее результатов сканирования шумов для группы арматурных диапазонов или некоторой части этих результатов, что может иметь вид, аналогичный тому, что показано на фиг. 10b, или на основе того, что показано на этом чертеже. При таком подходе оператору предоставлена значительная гибкость при выборе частоты сигнала глубины в арматурном режиме.
По-прежнему обращаясь к фиг. 10b, можно добавить частоту, например, прикоснувшись к кнопке 808 «Добавить частоту» (Add Frequency) и затем прикоснувшись к графику спектра. Частоту можно удалить, например, прикоснувшись к кнопке 810 «Удаление частоты» (Delete Frequency) и затем прикоснувшись к частоте, которую нужно удалить. Частоту можно переместить, например, прикоснувшись к кнопке 812 «Перемещение частоты» (Move Frequency) и затем прикоснувшись и перетащив частоту, которую нужно переместить. Выбранный поддиапазон может быть изменен путем прикосновения к кнопке 814 «Изменение поддиапазона» (Change Поддиапазон). Как будет дополнительно описано сразу же ниже, выбор частоты не ограничивается идентификацией точек с низкими шумами, а также может учитывать точки с сильными шумами или области спектрального сканирования.
На фиг. 11 представлен дополнительно расширенный вид показанной на фиг. 10a области спектра от 24 кГц до 25 кГц, обозначенный в целом поз. 820 и приведенный здесь для целей описания дополнительных подробностей относительно процедуры выбора частоты. В дополнение к идентификации точек, которым соответствует низкий уровень шума, как описано в отношении фиг. 10a, процессор 710 может применять то, что называется «запрещенная область» (“keep-out region”). Последняя будет исключать любую идентифицированную частоту с низким уровнем шумов, имея пиковый уровень шумов в пределах выбранного частотного окна 822, центром которого является указанная идентифицированная частота с низким уровнем шумов. Шумы можно идентифицировать, например, на основе величины, превосходящей пороговый уровень 824, на основе среднего уровня шумов для рассматриваемого поддиапазона, и/или на основе уровня шумов, ассоциированного с близлежащей точкой с низким уровнем шумов. В одном из вариантов указанное частотное окно может иметь ширину приблизительно 60 Гц (+/- 30 Гц), а пороговый уровень может быть на 10 дБ или более превосходить уровень шумов в ассоциированной точке с низким уровнем шумов. На основе использования такого частотного окна частоты (b) и (e) можно исключить из-за близости пиков 826 и 830 соответственно. В случае, когда нужно больше частот, процессор 710 может заново исследовать спектр, показанный на фиг. 11, с целью идентифицировать новую группу частот-кандидатов. В группе арматурных диапазонов арматурное частотное окно может иметь ширину, отличную от ширины частотного окна в нормальном режиме. Например, арматурное частотное окно может быть более узким, поскольку сканирование шумов можно осуществлять с небольшим шагом, например, 5 Гц.
На фиг. 12a представлена логическая схема, иллюстрирующая вариант способа, в целом обозначенный поз. 900, для работы локатора 20 при осуществлении спектрального сканирования и назначения частот для последующей работы в нормальном режиме согласно настоящему изобретению. Способ начинается с этапа 904 и переходит к этапу 908, на котором выполняется сканирование полного частотного спектра, например, от 0 Гц до 45 кГц для рассматриваемого варианта, хотя для этого сканирования может быть использован любой подходящий диапазон. Это сканирование может представлять собой сканирование с высоким разрешением, например, с использованием разрешения 5 Гц, как обсуждается выше. В другом варианте может быть использовано первоначальное сканирование с более низким разрешением, так что такого разрешения только достаточно для установления величины среднего уровня шумов для поддиапазона. Если процедура выбора поддиапазона опирается на спектральное сканирование с низким разрешением, в последующем может быть выполнено спектральное сканирование с высоким разрешением как часть процедуры выбора частот, описываемой ниже. Когда для подземных работ должен быть использован широкополосный передатчик, для целей выбора частот может быть использовано только однократное сканирование с высоким разрешением. На этапе 910 определяют величину среднего уровня шумов для каждого поддиапазона. На этапе 914 поддиапазон может быть рекомендован на основе полученных величин среднего уровня шумов. Обычно может быть рекомендован поддиапазон, имеющий самую низкую величину среднего уровня шумов, хотя другие варианты могут использовать другие протоколы рекомендации и/или автоматический выбор поддиапазона. Например, может быть рекомендован поддиапазон, имеющий самую низкую величину пикового уровня шумов. В качестве другого примера, как обсуждается выше, могут быть рекомендованы больше одного поддиапазона. На этапе 918 может быть запрошен ввод пользователем на экране дисплея 36 команды, посредством которой пользователь может принять рекомендованный поддиапазон или выбрать другой поддиапазон. Например, пользователь может выбрать другой поддиапазон на основе своем осведомленности о передатчиках, доступных для проведения подземных работ. Как обсуждается выше, эта информация может служить в качестве первоначально вводимых данных, так что способ 900 может исключить поддиапазоны, не охватываемые имеющимся в текущий момент передатчиком (ами). Когда поддиапазон был выбран, способ переходит к этапу 920, на котором определяют частоты поддиапазона. В одном из вариантов частоты поддиапазона могут быть заданы заранее и сохранены в запоминающем устройстве 714 локатора или в запоминающем устройстве 218 передатчика. В другом варианте частоты поддиапазона могут быть определены оператором в процессе работы путем представления поддиапазона на экране дисплея 36, как обсуждается выше. В другом варианте частоты поддиапазона могут быть определены автоматически в соответствии с обсуждением относительно фиг. 10a-10c и 11 с использованием или без использования запрещенного окна, как это применяется на этапе 924. В случае использования широкополосного передатчика для осуществления подземных работ этапы 910 и 914 не требуются, поскольку весь диапазон передачи может быть доступен для выбора частот без необходимости ограничивать частоты каким-либо конкретным поддиапазоном (ами), так что на этапе 920 можно выделять частоты во всем диапазоне передачи. Соответственно частоты передачи можно выбирать автоматически во всем доступном диапазоне и/или они могут быть специально выбраны пользователем на основе результатов сканирования шумов с высоким разрешением без необходимости ограничений назначения частот на основе поддиапазонов. Следует понимать, что вариант с широкополосным передатчиком может быть конфигурирован для работы, например, на основе предпочтений оператора с использованием поддиапазонов таким же образом, как в случае передатчиков, ограниченных по поддиапазонам, где назначение частот может быть ограничено одним или несколькими поддиапазонами, хотя это и не является обязательным требованием. На этапе 928 определяют, достаточное ли число частот было идентифицировано. Если нет, работа возвращается к этапу 920 для идентификации дополнительных частот. Если было идентифицировано достаточное число частот, работа переходит к этапу 930, на котором определяют рекомендованные частоты для сигнала 120 глубины и сигнала 122 данных. Этот последний этап может быть опцией в полностью автоматизированном варианте. На этапе 934 информация может быть представлена на дисплее 36 для сбора вводимых пользователем команд, например, подтверждения выбора частот или изменения выбора частот. Например, пользователь может предпочесть перемещение частоты сигнала глубины в другую позицию в своем поддиапазоне или в совершенно другой поддиапазон. Безусловно, в варианте с широкополосным передатчиком нет необходимости ограничивать выбор частоты каким-либо конкретным диапазоном и/или поддиапазоном. На этапе 938 информация о выбранных частотах может быть передана передатчику 130 с использованием внешней схемы 722 связи локатора и внешнего соединения 174 связи (фиг. 3) передатчика. Переход в нормальный режим работы может быть осуществлен в ходе процедуры подземных работ на этапе 940.
В одном из вариантов способа 900 число частот, которые нужно выбрать, может быть основано на состоянии шумовой среды. Например, если сканирование шумов, будь то в ограниченном поддиапазоне или нет, покажет среду с низким уровнем шумов, можно выбрать относительно больше частот. В этом случае можно использовать 32 или больше частот символов вместо 16 частот символов. Если сканирование шумов покажет сильно зашумленную среду, можно использовать относительно меньшее число частот символов, такое как, например, 4 или 8 частот символов вместо 16 частот. Обычно использование относительно меньшего числа частот может помочь избежать различных источников шумов в среде с сильными помехами. С другой стороны, использование большего числа частот символов может повысить пропускную способность при передаче данных.
На фиг. 12b представлена логическая схема, иллюстрирующая один из вариантов способа, в целом обозначенного поз. 914, для работы локатора 20 при осуществлении спектрального сканирования и назначения частот для последующей работы в арматурном режиме согласно настоящему изобретению. Способ начинается на этапе 946 и переходит к этапу 948, на котором может быть выполнено сканирование полного частотного спектра, например, от 0 Гц до 45 кГц для рассматриваемого варианта, хотя для этого сканирования может быть использован любой подходящий диапазон. Например, на основе фиг. 5c, сканирование может быть осуществлено приблизительно от 0 Гц до 18 кГц. Это сканирование может представлять собой сканирование с высоким разрешением, использующее разрешение 5 Гц, особенно для группы арматурных диапазонов 424. Для выбора частот символов можно использовать меньшее разрешение, как описано выше. На этапе 950 величина среднего уровня шумов в каждом поддиапазоне может быть определена для поддиапазонов частот символов, а также сканированные частоты могут быть проанализированы на предмет потенциального использования в качестве частот сигнала глубины. Поддиапазон для символов данных может быть рекомендован и/или выбран на основе какого-либо подходящего статистического параметра, такого как, например, величины средних уровней шума, величины минимальных уровней шума, величины пиковых уровней шума и/или величины стандартных отклонений, способом, согласованным с приведенными выше описаниями в сочетании с рекомендацией одной или более частот сигнала глубины. На этапе 954, на дисплее 36 может появиться запрос введенной пользователем команды, посредством которой пользователь может принять рекомендованный поддиапазон или выбрать другой поддиапазон для символов данных. Пользователь может также выбрать, модифицировать или подтвердить одну или более потенциальных частот сигнала глубины. Следует отметить, что возможность ввода команды пользователем может быть опцией в автоматизированном варианте, осуществляющем выбор частоты для пользователя. Когда поддиапазон для данных и частоты сигнала глубины выбраны, способ переходит к этапу 956, на котором устанавливают поддиапазон для данных и частоту сигнала глубины. В одном из вариантов поддиапазон для данных и частоты сигналов глубины могут быть заданы заранее и сохранены в запоминающем устройстве 714 локатора или в запоминающем устройстве 218 передатчика. В другом варианте частоты в поддиапазоне для данных и/или частоты сигналов глубины могут быть определены оператором в процессе работы путем представления этих поддиапазона для данных и/или арматурных диапазонов на экране дисплея 36, как обсуждается выше. В другом варианте поддиапазон для данных и частоты сигнала глубины могут быть определены и применены автоматически в соответствии с приведенным выше обсуждением со ссылками на фиг. 10a-10c и 11 вместе с или без применения запрещенного окна, как это применяется на этапе 958 и обсуждается выше.
Следует отметить, что определение и индикация на основе поддиапазонов на этапе 950 не требуются, как обсуждается выше, поскольку нет требования ограничить частоты каким-либо конкретным поддиапазоном (ами), и этап 950 может выделять частоты во всем диапазоне передачи. Соответственно, частоты передачи могут быть выбраны автоматически во всем доступном диапазоне и/или специализированы пользователем на основе сканирования шумов с высоким разрешением. Следует понимать, что один из вариантов широкополосного передатчика может быть конфигурирован для работы, например, на основе предпочтений оператора с использованием поддиапазонов таким же образом, как передатчики с ограничением поддиапазонов, где назначение частот может быть ограничено одним или несколькими поддиапазонами, хотя это и не является обязательным требованием. На этапе 960 определяют, было ли идентифицировано достаточное число частот, если нет, работа возвращается к этапу 950 для идентификации дополнительных частот. Если достаточное число частот было идентифицировано, работа переходит к этапу 962, на котором рекомендуют частоты для сигнала 120 глубины и сигнала 122 данных. Этот последний этап может быть опцией в полностью автоматизированном оборудовании. На этапе 964 информация может быть представлена на экране дисплея 36 для целей сбора вводимых пользователем команд и данных, например, подтверждающих выбор частот или изменяющих выбор частот. Например, пользователь может предпочесть переместить частоту сигнала глубины в другую позицию арматурного диапазона или совершенно в другой арматурный диапазон. Безусловно, в варианте с широкополосным передатчиком нет необходимости ограничивать выбор частоты каким-либо конкретным диапазоном и/или поддиапазоном. Здесь снова нет обязательного требования, чтобы пользователь вводил команды и данные в автоматизированное оборудование. На этапе 966 информация о выбранных частотах может быть передана передатчику 130 с использованием внешней схемы 722 связи локатора и внешнего соединения 174 связи (фиг. 3) передатчика. Переход в арматурный режим работы может быть осуществлен в ходе процедуры подземных работ на этапе 968.
Обратимся теперь, к фиг. 12c в сочетании с фиг. 12b. На фиг. 12c представлена логическая схема, иллюстрирующая один из вариантов способа, осуществляемого на этапе 950 на фиг. 12b, где эта схема в целом обозначена поз. 970, для целей анализа сканируемых частот в диапазоне (ах) частот сигнала глубины. Способ начинается с этапа 972 и переходит к этапу 974, на котором сравнивают величины шумов, получаемые в результате сканирования шумов в каждом из арматурных диапазонов RBL, RBM и RBH, показанных на фиг. 5c, для идентификации, на этапе 976, по меньшей мере той частоты в каждом из этих арматурных диапазонов, на которой имеют место самые низкие шумы. В этом варианте результатом являются три потенциальных частоты сигнала глубины, на которых имеют место самые слабые шумы. На этапе 978, группа частот с низким уровнем шумов может быть представлена пользователю, например, на основе экрана, показанного на фиг. 6c, и/или может быть осуществлен автоматический выбор частоты с самым низким уровнем шумов из этой группы частот. На этапе 980 работа может вернуться к этапу 950, показанному на фиг. 12b.
Обратимся теперь к фиг. 12d в сочетании с фиг. 12b, на первом из этих чертежей представлена логическая схема, иллюстрирующая другой вариант способа, осуществляемого на этапе 950, показанном на фиг. 12b, схема в целом обозначена поз. 982, для целей анализа сканируемых частот в диапазоне (ах) частот глубины. Осуществление способа начинается на этапе 983 и переходит к этапу 984, на котором сравнивают несколько величин шумов, получаемых в результате сканирования шумов, для всего арматурного диапазона, с пороговым значением. Последнее может, по меньшей мере первоначально иметь низкую величину по причинам, которые будут очевидны из дальнейшего обсуждения. На этапе 985 идентифицируют частоты с низким уровнем шумов, не превышающим порогового значения. На этапе 986 проверяют, были ли идентифицированы какие-либо частоты, когда использовалось низкое пороговое значение. Если частоты были идентифицированы, работа переходит к этапу 987, на котором может быть представлена на дисплее, выбрана автоматически и/или подтверждена частота сигнала глубины во взаимодействии с оператором, если понадобится. На этапе 988 работа возвращается к этапу 950, показанному на фиг. 12b. Если, с другой стороны, на этапе 986 не была идентифицирована ни одна частота, поскольку на всех сканированных частотах уровни шумов оказались выше порогового уровня шумов, работа переходит к этапу 990, на котором система может запросить оператора запустить повторное сканирование шумов по меньшей мере в арматурном диапазоне. Следует отметить, что принятие решения на этапе 986 не является обязательным требованием. В этом смысле может быть сформирован какой-либо подходящий отклик на избыточные или сильные активные помехи. Например, в другом варианте, оператору может быть выдано указание, что в арматурном диапазоне присутствуют сильные шумы. В рассматриваемом варианте, если выбрано повторное сканирование, работа переходит к повторному сканированию на этапе 991 с последующим возвратом к этапу 985. Если пользователь не потребовал повторного сканирования на этапе 990, оператор может перейти к этапу 992, на котором пользователю направляют запрос, не хочет ли он увеличить пороговую величину шумов. Если так, пороговая величина шумов может быть увеличена, например, на заданную величину приращения, либо пользователь может сам задать величину этого приращения. Затем работа может вернуться к этапу 991 и продолжаться от него. Если пользователь не захотел увеличить пороговую величину шумов на этапе 992, работа может перейти к этапу 993, на котором у пользователя спрашивают, не хочет ли он выйти из арматурного режима и войти в нормальный режим, в предположении, что в окружающей рабочей среде присутствуют слишком сильные локальные активные шумы. Если пользователь выберет переход в нормальный режим, этот переход в нормальный режим, в котором может использоваться, например, способ 900, показанный на фиг. 12a, осуществляется на этапе 994. С другой стороны, если на этапе 993 пользователь не выберет переход в нормальный режим, работа переходит к этапу 995, который не является обязательным, однако осуществляет выбор частоты сигнала глубины на основе удовлетворения другому набору шумовых спецификаций. Затем работа переходит к этапу 987. Один из вариантов этапа 995 можно видеть на этапе 12e, как будет описано сразу же ниже, хотя к процедуре, представленной на фиг. 12e можно перейти независимо от способа 982, показанного на фиг. 12d.
Обратимся теперь к фиг. 12e, который иллюстрирует другой вариант способа, представленного на этапе 950, показанном на фиг. 12b, этот вариант в целом обозначен поз. 1000, или этот вариант может служить этапом 995, показанным на фиг. 12d, для целей анализа сканируемых частот в диапазоне (ах) частот сигнала глубины. Следует отметить, что способ 1000 может служить в качестве первичного варианта для идентификации частоты сигнала глубины и/или в качестве дополнительной процедуры проверки (этап 995 на фиг. 12d), чтобы убедиться, что идентифицированная частота является настолько низкой, что ее можно практически использовать, как это станет очевидным из последующего описания. В этом отношении, следует отметить, устойчивость к пассивным помехам обычно усиливается по мере уменьшения частоты, так что может быть выгодным использовать самую низкую частоту, какую практично использовать. Осуществление способа начинается на этапе 1004 и переходит к этапу 1006, на котором находят частоту с самым низким уровнем шумов, f(low), в арматурном диапазоне на основе сканирования шумов, например, с шагом 5 Гц. На этапе 1008, хотя это не является обязательным требованием, может быть определена величина сдвига от нижнего предела арматурного диапазона. На этапе 1010 эту величину сдвига можно сравнить с пороговой величиной сдвига, которая должна указать, что частота f(low) уже достаточно близка к нижнему пределу арматурного диапазона. Если определено, что найденная величина сдвига является приемлемой, идентифицированная частота с низким уровнем шумов может быть указана и/или автоматически выбрана на этапе 1014. На этапе 1016 процедура может вернуться, например, к общей процедуре выбора частоты, которая также выбирает частоты символов, как это делается, например, на этапе 950, показанном на фиг. 12b. С другой стороны, если на этапе 1010 определяют, что величина сдвига слишком велика, работа может направиться к этапу 1020, на котором устанавливают величину n индекса, подсчитывают шаги по частоте для сканирования шумов в арматурном диапазоне, начиная от нижнего предела (n::: 1) арматурного диапазона и заканчивая числом n(low) шагов, представляющим собой величину n, соответствующую частоте f(low). На этапе 1024, если величина шумов для частоты, идентифицированной текущей величиной n, находится в заданных пределах, работа может перейти к этапу 1014. Следует отметить, что приемлемые пределы могут быть определены каким-либо подходящим способом, таким как, например, не более чем на некоторую заданную величину выше измеренного уровня шумов на частоте f(low). Если уровень шумов не укладывается в установленные пределы, работа направляется на этап 1026, где увеличивают величину n. На этапе 1028 затем проверяют, равна ли текущая величина n величине n(low). Если это так, на этапе 1030 могут представить на дисплее и/или автоматически выбрать частоту f(low) в качестве частоты сигнала глубины. После этого работа может вернуться к этапу 950, показанному на фиг. 12b. Если величина n на этапе 1028 оказалась меньше величины n(low), работа возвращается к этапу 1024 для сравнения уровня шумов на указанной частоте с приемлемыми пределами, как обсуждается выше. При таком подходе образуется контур, проверяющий на каждом шаге увеличенную частоту сигнала глубины, вплоть до частоты f(low), так что может быть найдена приемлемая частота, которая ниже фактической частоты, где отмечен самый низкий уровень шумов, в арматурном диапазоне.
На фиг. 13 представлена логическая схема, иллюстрирующая один из вариантов способа работы локатора 20 во время подземных работ, в целом обозначенный поз. 1100. Осуществление способа начинается на этапе 1104 и продолжает работу одновременно вдоль ветви 1110 определения глубины и ветви 1112 выделения данных. Ветвь 1110 определения глубины принимает сигнал 120 глубины на этапе 1120 и затем определяет глубину, на которой находится передатчик, на этапе 1124. Поскольку сигнал глубины передают на выделенной частоте, этот сигнал принимают по существу на непрерывной основе в течение всех подземных работ. Соответственно этапы 1120 и 1124 повторяют в виде контура во время работы локатора в нормальном рабочем режиме. Как описано выше, этап 1124 может использовать сигнал глубины для определения глубины расположения передатчика на основе дипольных уравнений. В одном из вариантов часть процедуры определения глубины может содержать компенсацию влияния расстояния от локатора до поверхности земли. В одном из вариантов для приема нескольких частот сигнала глубины, таких как, например, частоты из диапазонов RBL, RBM и RBH (см. Фиг. 6c), следует отметить, что средний уровень этих сигналов может быть использован для целей определения глубины. Ветвь 1112 выделения данных начинается на этапе 1130 с приема сигнала 122 данных в форме потока символов, который может быть построен из многобитовых символов. На этапе 1134 этот поток символов может быть временно записан для декодирования, например, в запоминающем устройстве 714 (фиг. 9a). На этапе 1138 процессор 710 декодирует поток символов. В этом случае один из символов может быть использован в качестве синхронизационного символа, который может идентифицировать начало пакетной структуры. В одном из вариантов, использующем 4-битовый символ (т.е. 16 частот символов), могут быть добавлены семнадцать частот символов для целей представления синхронизационного символа в потоке символов. Одна из подходящих структур пакетов, в качестве неисчерпывающего примера, может быть представлена рядом 4-битовых переменных, таким как S, PI, R1, P2, R2, BT1, BT2, R3, где S имеет фиксированную величину, соответствующую синхронизационному символу. Символ PI обозначает переменную, представляющую первые четыре бита (0-3) величины тангажа, символ R1 обозначает первую переменную крена, характеризующую ориентацию по крену. Символ P2 обозначает биты 4-7 величины тангажа, символ BT1 обозначает первые четыре бита (0-3) данных аккумулятора и температуры. Символ BT2 обозначает биты 4-7 данных аккумулятора и температуры, и символ R3 обозначает третью переменную крена. В этом отношении следует понимать, что величина тангажа аккумулирована на основе двух разных переменных, соответствующих двум символам из состава потока символов, которые разделены другим символом. Иными словами, четыре бита символа P2 могут быть добавлены к четырем битам символа PI для представления полной величины тангажа. Могут быть добавлены еще дополнительные биты на основе другой переменной тангажа, если нужно. Аналогично, 8 бит данных аккумулятора и температуры могут быть собраны на основе двух последовательных переменных BT1 и BT2. На этапе 1140, поток данных может быть заново собран на основе декодированного потока символов для реконструкции первоначальных данных, которые послужили основой для потока символов в передатчике 130. На этапе 1144 процессор 710 выделяет параметры из потока данных. Эти параметры могут представлять собой параметры ориентации, такие как тангаж и крен, температуру, давление, напряжение и ток аккумулятора и любые другие интересующие данные. На этапе 1148, процессор 710 реагирует на выделенные параметры каким-либо подходящим способом, таким как, например, управление дисплеем 36 для индикации на экране величин тангажа и крена, состояния аккумулятора, температуры и давления и/или входных данных для других процессов, таких как, например, подача предупреждающих сигналов или сигналов тревоги, когда были нарушены пороговые величины температуры и давления. Затем работа возвращается к этапу 1130.
В этот момент уместно рассмотреть другие подробности относительно работы передатчика 130 во время подземных работ. Варианты передатчика могут гибко распределять мощность передачи между различными передаваемыми частотами, например, между частотами, приведенными в таблице 3 и 4. В одном из вариантов каждой частоте может быть выделена одинаковая величина мощности передачи наравне с другими частотами. В другом варианте мощность передачи может быть распределена между частотами неравномерно. Например, одной или нескольким частотам может быть выделена большая мощность передачи, чем другой группе частот. Еще в одном другом варианте каждой частоте может быть назначена своя, отличная от других частот мощность передачи. Такое распределение мощностей может быть осуществлено каким-либо подходящим способом. Например, портативное устройство 20, показанное на фиг. 1 и 9, может быть конфигурировано для мониторинга среднего уровня сигнала, ассоциированного с каждой частотой, где сигнал каждой частоты принимают во время работы в нормальном режиме. Мощность передачи может быть затем перераспределена непосредственно во время работы между частотами на основе скользящего среднего уровня сигнала. Например, резкое снижение уровня сигнала с некой конкретной частотой может быть присвоено влиянию помех, так что для этой частоты может быть выделена дополнительная мощность. В некоторых вариантах частотам с низкими уровнями шумов могут быть назначены относительно небольшие мощности для передачи. Перераспределенные величины мощности передачи могут быть переданы передатчику 130 любым подходящим способом. Например, портативное устройство 20 может передавать схему перераспределения мощности буровому станку 80 посредством сигнала 44 телеметрии. Буровой станок может затем передать новую схему распределения мощности передатчику 130 через бурильную колонну с использованием последней в качестве электрического проводника. В другом варианте портативное устройство 20 может быть конфигурировано с дополнительной антенной 712 (фиг. 1), такой как дипольная антенна, для передачи сигнала для непосредственного приема передатчиком 130. Модуляция этого сигнала может быть декодирована передатчиком 130 для выделения новой схемы питания.
Обратимся снова к фиг. 10b, распределение мощности между выбранными частотами может быть также осуществлено в ходе процедуры или режима выбора частот прежде, чем перейти в нормальный режим или в арматурный режим. Например, распределение мощности может быть основано на уровне шумов, ассоциированным с каждой выбранной частотой, как показано на фиг. 10a и 10b. Хотя для частот с низким уровнем шумов, идентифицированных на фиг. 10a и l0d, показаны приблизительно одинаковые уровни шума для целей иллюстрации, такая ситуация совсем не обязательно имеет место в реальности. Если имеют место значительные вариации между уровнями шумов на идентифицированных частотах, характеризуемых самыми низкими уровнями шума, можно выделять повышенную долю мощности передачи тем частотам, на которых зафиксированы относительно более высокие уровни шумов. Напротив, мощность передачи, выделенная частоте с очень с низким уровнем шумов, может быть относительно низкой, чтобы можно было выделить дополнительную мощность для одной или нескольких других частот. Мощность передачи можно распределять также таким образом, чтобы такое распределение было согласовано с применением запрещенного окна, как описано выше. Например, если выбрана такая конкретная частота, что какая-либо гармоника промышленной частоты или другие шумы аномально попадают в запрещенное окно для этой конкретной частоты, этой конкретной частоте может быть выделена дополнительная мощность. Следует понимать, что в любом варианте, использующем выделение мощности передачи, которое может изменяться от частоты к частоте, такое выделение может быть произведено на основе общей потребляемой мощности, особенно если передатчик 130 получает энергию от аккумуляторов. При таком подходе общая потребляемая мощность может быть уменьшена, либо можно поддерживать целевую величину общей потребляемой мощности.
Заявители признают, что передача сигнала глубины в арматурном режиме, как описывается здесь, на более низких частотах по сравнению с частотами для передачи символов данных, которые намного выше, вызывает определенную озабоченность. В этом отношении, по мере того, как частота сигнала глубины уменьшается относительно конкретной частоты сигнала данных, даже без каких-либо изменений активных помех и в отсутствие каких-либо контрмер, дальность, на которой может быть принят сигнал глубины, уменьшается, по наблюдениям Заявителей, по сравнению с дальностью, на которой может быть принят сигнал данных. Это может оказаться весьма проблематичным во время работы, поскольку локатор 20 может потерять прием сигнала 120 глубины намного раньше потери приема сигнала 122 данных. Для обеспечения реализации полных возможностей системы необходимо, чтобы локатор принимал оба сигнала - и сигнал глубины, и сигнал данных. Не имея намерения ограничиваться какой-либо теорией, Заявители уверены, что сокращение или уменьшение дальности приема на низких частотах обусловлено уменьшением эффективности связи между передающей и приемной антеннами. В то же время, антенна ведет себя главным образом, как катушка индуктивности, так что полное сопротивление антенны уменьшается при уменьшении частоты. При фиксированном напряжении возбуждения ток увеличивается по меньшей мере в основном по линейному закону. Согласно наблюдениям Заявителей снижение уровня сигнала и тем самым дальности приема сигнала глубины является комплексным по своей природе. В различных вариантах подходящие мощности передачи для компенсации такого снижения можно определять любым приемлемым способом, например, эмпирически. Компенсировать этот эффект уменьшения связи можно с помощью таблицы множителей, либо может быть определена функция, например, на основе подбора кривой, для использования процессором передатчика с целью установления мощности передачи на основе частоты. С целью поддержания по меньшей мере приблизительно одинаковой дальности приема для сигнала глубины и сигнала данных можно использовать, например, для регулирования сигнала глубины по меньшей мере до в 100 раз большей мощности, чем мощность сигнала данных. Такое регулирование можно балансировать путем уменьшения мощности, выделенной для сигнала данных, чтобы адаптироваться к восстановлению баланса и сдвигу мощности к сигналу глубины, не нарушая порогового уровня максимальной мощности, либо путем уменьшения мощности, выделенной сигналу глубины, выделяя в то же время дополнительную мощность для сигнала данных по той же причине. В качестве другого примера, для частоты сигнала глубины, равной 330 Гц, и частоты сигнала данных, равной 18 кГц, для сигнала глубины может быть выделена примерно в 5 раз большая мощность, чем для сигнала данных. В свете этих соображений Заявители предложили усовершенствованную систему, в которой процессор передатчика конфигурирован для генерации входного драйверного сигнала глубины с частотой сигнала глубины и для генерации входного драйверного сигнала данных, характеризующего данные датчика, с целью управления мощностью передачи сигнала глубины относительно мощности передачи сигнала данных таким образом, чтобы первая дальность приема сигнала глубины по меньшей мере приблизительно совпала с второй дальностью приема сигнала данных, даже при том, что частота сигнала глубины намного ниже (например, 1 кГц или ниже) частоты сигнала данных. Говоря по-другому, компенсацию осуществляют посредством балансирования мощности передачи между сигналом глубины и сигналом данных таким образом, чтобы дальности приема обоих этих сигналов были по меньшей мере приблизительно одинаковыми. В то же время, такое балансирование может учитывать дополнительное требование управлять полной потребляемой передатчиком мощностью таким образом, чтобы, например, не превысить заданную максимальную потребляемую мощность. В одном из вариантов таблица 410 множителей в составе таблицы 3 может быть конфигурирована, по меньшей мере приблизительно, на основе указанной выше характеристики уменьшения дальности, хотя это и не является обязательным требованием. В таблице 3 должно быть очевидно, что мощность передачи зависит от величины множителя.
Приведенное выше описание настоящего изобретения было представлено с целью иллюстрации и описания. Оно не предназначено быть исчерпывающим или как-то ограничивать настоящее изобретение точно той формой или формами, какие были описаны, так что возможны и другие модификации и изменения в свете приведенных выше положений. Соответственно, специалисты в рассматриваемой области смогут определить ряд модификаций, перестановок, дополнений и частичных комбинаций вариантов, описанных выше.
Все описываемые здесь элементы, части и этапы предпочтительно включены. Должно быть понятно, что любые из этих элементов, частей и этапов могут быть заменены другими элементами, частями и этапами или устранены, как это будет очевидно специалистам в рассматриваемой области.
В широком смысле, предлагаемый текст описывает по меньшей мере следующее: передатчик для использования в погруженном в землю состоянии управляет мощностью передачи сигнала глубины относительно мощности передачи сигнала данных таким образом, чтобы первая дальность приема сигнала глубины по меньшей мере приблизительно была согласована со второй, отличной от первой дальностью приема сигнала данных. Портативное устройство может образовать систему с передатчиком, в котором портативное устройство сканирует несколько частот в пределах по меньшей мере одного диапазона низкочастотного сигнала глубины с целью измерения уровней электромагнитных шумов на каждой из нескольких частот и идентификации по меньшей мере одной из частот в качестве потенциальной частоты сигнала глубины для передатчика. Это портативное устройство может содержать фильтр с двумя режимами работы, имеющий в составе фильтр для арматурного режима и фильтр для нормального режима. Частоту сигнала глубины можно динамически позиционировать относительно низкочастотных шумов.
Концепции
Настоящее описание предлагает по меньшей мере следующие концепции.
1. Передатчик для использования в сочетании с системой горизонтального направленного бурения, содержащей бурильную колонну, проходящую от бурового станка к погруженному в землю инструменту, который служит опорой для передатчика, так что выдвижение и отведение назад бурильной колонны перемещает погруженный в землю инструмент под землей в ходе подземных работ, содержащий:
антенну;
один или более одного датчиков для генерации данных датчиков;
драйвер антенны для электрического возбуждения антенны, с тем чтобы излучать сигнал глубины в ответ на входной драйверный сигнал глубины для надземного приема для использования при определении глубины указанного погруженного в землю инструмента, а также для электрического возбуждения антенны в ответ на входной драйверный сигнал данных, для того чтобы излучать по меньшей мере один сигнал данных, характеризующий данные датчиков, с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем у сигнала глубины, для надземного выделения указанных данных датчиков, и
процессор, выполненный с возможностью генерации указанного входного драйверного сигнала глубины на указанной частоте сигнала глубины и для генерации указанного входного драйверного сигнала данных, характеризующего указанные данные датчиков, таким образом, чтобы управлять мощностью передачи сигнала глубины относительно мощности передачи сигнала данных, так чтобы одна дальность приема указанного сигнала глубины по меньшей мере приблизительно сопоставлялась другой, отличающейся дальности приема указанного сигнала данных.
2. Передатчик по концепции 1, в котором процессор дополнительно выполнен с возможностью регулирования указанной дальности приема сигнала данных в сочетании с регулированием указанной дальности приема сигнала глубины.
3. Передатчик по концепции 1 или 2, в котором процессор выполнен с возможностью регулировать указанную дальность приема сигнала данных в сочетании с указанной дальностью приема сигнала глубины таким образом, чтобы полная мощность, потребляемая передатчиком, не превысила заданный предел.
4. Передатчик по концепциям 1-3, в котором частота сигнала глубины выбирается в пределах диапазона частот сигнала глубины.
5. Передатчик по концепции 4, в котором процессор выполнен с возможностью регулирования указанного входного драйверного сигнала глубины таким образом, чтобы дальность приема сигнала глубины по меньшей мере приблизительно была равна дальности приема сигнала данных для любой выбранной частоты сигнала глубины в пределах указанного диапазона частот сигнала глубины.
6. Передатчик по концепциям 4 или 5, в котором указанный входной драйверный сигнал глубины представляет собой синусоидальный сигнал, имеющий амплитуду, и указанный процессор выполнен с возможностью регулировать указанную дальность приема сигнала глубины путем изменения указанной амплитуды на основе, по меньшей мере частично, конкретной позиции указанного сигнала глубины в указанном диапазоне частот сигнала глубины.
7. Передатчик по концепциям 1-6, в котором процессор выполнен с возможностью генерирования указанных входного драйверного сигнала глубины и входного драйверного сигнала данных так, что сигналу глубины выделяется более высокая мощность, чем сигналу глубины, чтобы увеличить дальность приема сигнала данных, когда, в противном случае, дальность приема сигнала данных была бы меньше дальности приема сигнала данных, если каждый из сигналов - сигнал глубины и сигнал данных - передаются с одинаковой мощностью.
8. Передатчик по концепциям 1-7, в котором сигнал глубины меньше 1 кГц.
9. Передатчик по концепциям 1-7, в котором сигнал глубины находится в диапазоне от 300 Гц до 1 кГц, включительно.
10. Передатчик для использования в сочетании с системой горизонтального направленного бурения, содержащей бурильную колонну, проходящую от бурового станка к погруженному в землю инструменту, который служит опорой для передатчика, так что выдвижение и отведение назад бурильной колонны перемещает погруженный в землю инструмент под землей в ходе подземных работ, содержащий:
антенну:
один или более одного датчиков для генерации данных датчиков;
драйвер антенны для электрического возбуждения антенны, с тем чтобы излучать сигнал глубины в ответ на драйверный сигнал глубины для надземного приема для определения глубины погруженного в землю инструмента, и для электрического возбуждения антенны, с тем чтобы излучать сигнал данных, характеризующий данные датчиков, с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем указанный сигнал глубины, для надземного выделения указанных данных датчиков; и
процессор, выполненный с возможностью генерации указанного драйверного сигнала глубины на частоте сигнала глубины и с возможностью генерации указанного драйверного сигнала данных на указанной частоте сигнала данных, с тем чтобы управлять первой дальностью приема указанного сигнала глубины относительно второй дальности приема указанного сигнала данных.
11. Система, содержащая:
передатчик, выполненный с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины на частоте сигнала глубины, которая выбирается в диапазоне частот сигнала глубины ниже 1 кГц, для обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, и который также подвержен воздействию электромагнитных шумов, которые могут изменяться в пределах указанной области; и
портативное устройство, выполненное с возможностью сканирования множества частот в указанном диапазоне частот сигнала глубины для измерения электромагнитных шумов на каждой частоте из указанного множества частот и для идентификации на основе измеренных шумов самой низкой частоты из указанных частот в качестве потенциальной частоты глубины, которая удовлетворяет требованию низких шумов.
12. Система по концепции 11, в которой при оценке требования низких шумов сравнивается измеренный шум для каждой частоты из указанного множества частот с пороговой величиной в качестве части процедуры идентификации указанной потенциальной частоты глубины.
13. Система по концепции 11, в которой требование низких шумов основано на относительном сравнении измеренных электромагнитных шумов на каждой частоте из указанного множества частот.
14. Система по концепциям 11-13, в которой портативное устройство выполнено с возможностью рекомендовать пользователю указанную потенциальную частоту глубины.
15. Система по концепциям 11-14, в которой портативное устройство выполнено с возможностью автоматического выбора потенциальной частоты глубины в качестве указанной частоты глубины.
16. Система по концепции 15, в которой портативное устройство выполнено с возможностью для пользователя не принимать указанную потенциальную частоту глубины в качестве частоты глубины.
17. Система по концепции 11, в которой портативное устройство выполнено с возможностью, по меньшей мере, запрашивать у пользователя подтверждение предпочтительной частоты глубины.
18. Система по концепциям 11-17, в которой указанное портативное устройство выполнено с возможностью конфигурировано идентификации по меньшей мере одной потенциальной резервной частоты глубины из указанного множества частот, которая выше указанной потенциальной частоты глубины, причем является следующей наиболее низкой частотой в указанном диапазоне частот, среди указанного множества частот, которые удовлетворяют указанному требованию по шумам.
19. Система по концепции 18, в которой портативное устройство выполнено с возможностью перехода в режим сканирования шумов в реальном времени для сканирования электромагнитных шумов вдоль предполагаемой трассы по меньшей мере на предпочтительной частоте глубины и на указанной резервной частоте глубины и указания оператору уровня шумов в реальном времени для указанной предпочтительной частоты глубины и указанной резервной частоты глубины.
20. Система по концепциям 11-19, в которой портативное устройство дополнительно выполнено с возможностью сканирования другого множества частот выше 1 кГц для выбора по меньшей мере одной частоты сигнала данных на основе измерений электромагнитных шумов на каждой частоте из указанного множества частот выше 1 кГц, а передатчик дополнительно содержит один или более одного датчиков, которые генерирует данные датчиков, и выполнен с возможностью передачи указанных данных датчиков с использованием по меньшей мере указанной частоты сигнала данных.
21. Портативное устройство в качестве части системы, в которой передатчик выполнен с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины, содержащее
антенну, имеющую выход; и
приемник, выполненный с возможностью сканирования множества частот в диапазоне частот сигнала глубины ниже 1 кГц для измерения электромагнитных шумов на каждой частоте из указанного множества частот на основе выходного сигнала антенны и с возможностью идентификации в качестве потенциальной частоты глубины такой частоты, которая является наиболее низкой частотой из указанных частот и удовлетворяет требованию низких шумов.
22. Портативное устройство в качестве части системы, в которой передатчик выполнен с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины, содержащее
антенну, имеющую выход; и
приемник, выполненный с возможностью измерения электромагнитных шумов на основе выходного сигнала антенны по меньшей мере в двух разных частотных диапазонах ниже 1 кГц посредством пошагового сканирования каждого частотного диапазона для генерации множества пошаговых отсчетов уровня шумов в каждом частотном диапазоне и представления на дисплее одной или более одной потенциальных частот глубины для каждого частотного диапазона, для выбора оператором на основе указанных пошаговых отсчетов уровня шумов.
23. Портативное устройство по концепции 22, в котором приемник дополнительно выполнен с возможностью выбора потенциальной частоты глубины для каждого частотного диапазона как соответствующей наиболее низкому значению из указанных пошаговых отсчетов уровня шума из каждого частотного диапазона, и с возможностью, по меньшей мере, представления на дисплее указанной потенциальной частоты глубины для каждого частотного диапазона для выбора одной из указанных потенциальных частот глубины в качестве частоты глубины для указанного сигнала глубины.
24. Портативное устройство по концепции 23, выполненное с возможностью идентификации, по меньшей мере, указанной частоты глубины для передатчика для передачи во время указанной рабочей процедуры.
25. Портативное устройство по концепции 23 или 24, выполненное с возможностью представления группы потенциальных частот глубины для выбора дополнительной частоты из указанных потенциальных частот глубины в качестве резервной частоты глубины для указанного сигнала глубины.
26. Портативное устройство по концепции 25, выполненное с возможностью дополнительной идентификации указанной частоты глубины и указанной резервной частоты глубины для передатчика для передачи из портативного устройства во время указанной рабочей процедуры.
27. Портативное устройство по концепциям 23-26, выполненное с возможностью автоматического выбора одной из указанных потенциальных частот глубины в качестве указанной частоты глубины указанного сигнала глубины.
28. Портативное устройство по концепциям 22-26, выполненное с возможностью перехода в режим представления на дисплее уровня шума в реальном времени после представления на дисплее указанной группы потенциальных частот глубины, с тем чтобы непрерывно представлять на дисплее оператору отсчеты уровня шумов в реальном времени для каждой потенциальной частоты глубины.
29. Портативное устройство по концепции 28, выполненное с возможностью выбора оператором одной из потенциальных частот глубины в качестве указанной частоты глубины указанного сигнала глубины во время нахождения в режиме представления на дисплее уровня шумов в реальном времени.
30. Портативное устройство по концепциям 22-29, выполненное с возможностью приема сигнала глубины от передатчика во время рабочей процедуры для определения глубины передатчика.
31. Система, содержащая:
передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины, которая является выбираемой в диапазоне частот сигнала глубины ниже 1 кГц, для обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, и который также подвергается воздействию электромагнитных шумов, которые могут изменяться в указанной области; и
портативное устройство, выполненное с возможностью измерения электромагнитных шумов на основе выходного сигнала антенны по меньшей мере в двух разных частотных диапазонах ниже 1 кГц посредством пошагового сканирования каждого частотного диапазона для формирования множества пошаговых отсчетов уровня шумов в каждом частотном диапазоне, и с возможностью представления на дисплее одной или более одной потенциальных частот глубины для каждого частотного диапазона, для выбора оператором на основе указанных пошаговых отсчетов уровня шумов.
32. Система по концепции 31, в которой портативное устройство дополнительно выполнено с возможностью выбора указанной потенциальной частоты глубины для каждого частотного диапазона, как соответствующей наиболее низкому отсчету из указанных пошаговых отсчетов уровня шумов из каждого частотного диапазона, и с возможностью по меньшей мере представления на дисплее указанной потенциальной частоты глубины для каждого частотного диапазона для выбора одной из указанных потенциальных частот глубины в качестве частоты глубины для указанного сигнала глубины.
33. Портативное устройство в качестве части системы, в которой передатчик выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины и поток данных на одной или более одной частотах данных, который по меньшей мере характеризует параметр ориентации передатчика, содержащее
антенну для приема указанного сигнала глубины и указанных частот данных для формирования выходного сигнала;
секцию переключаемого фильтра для ограничения выходного сигнала антенны в нормальном режиме одним частотным диапазоном выше заданной частоты, с тем чтобы пропускать указанный сигнал глубины и указанный поток данных на одной или более одной частотах, и для ограничения указанного выходного сигнала антенны в арматурном режиме другой частотной полосой, с тем чтобы пропускать указанный сигнал глубины на частоте ниже указанной заданной частоты и пропускать указанный поток данных, включающий в себя одну или более одной частот выше указанной заданной частоты; и
процессор, выполненный с возможностью переключения указанной секции переключаемого фильтра между нормальным режимом и арматурным режимом для выделения указанного сигнала глубины и указанного потока данных в ответ на выбор нормального режима и арматурного режима.
34. Портативное устройство по концепции 33, в котором переключаемый фильтр содержит фильтр нормального режима для указанного нормального режима и арматурный фильтр для указанного арматурного режима.
35. Портативное устройство по концепции 33 или 34, в котором указанная заданная частота равна 1 кГц.
36. Портативное устройство по концепции 34 или 35, в котором указанный арматурный фильтр включает низкочастотный изгиб на частоте ниже 1 кГц, а указанный фильтр нормального режима включает низкочастотный изгиб на частоте выше 1 кГц.
37. Портативное устройство по концепциям 34-36, в котором указанный арматурный фильтр определяет арматурную полосу пропускания, ширина которой больше ширины полосы пропускания нормального режима, которая определяется указанным фильтром нормального режима.
38. Портативное устройство по концепции 37, в котором первый верхний изгиб указанной арматурной полосы пропускания по меньшей мере приблизительно совпадает со вторым верхним изгибом указанной полосы пропускания нормального режима.
39. Портативное устройство по концепции 37 или 38, в котором указанная арматурная полоса пропускания пропускает дополнительный низкочастотный шум по сравнению с указанной полосой пропускания нормального режима, причем указанное портативное устройство дополнительно выполнено с возможностью сканирования электромагнитных шумов по меньшей мере ниже указанной заданной частоты для идентификации по меньшей мере одной частоты с низким шумом для использования передатчиком в качестве частоты глубины арматурного режима в указанном арматурном диапазоне для динамического позиционирования указанной частоты арматурного режима относительно указанного дополнительного низкочастотного шума.
40. Система по концепции 39, в которой портативное устройство выполнено с возможностью передачи указанной идентифицированной частоты с низким шумом в передатчик для использования в качестве указанной частоты сигнала глубины.
41. Система, содержащая:
передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на выбираемой частоте сигнала глубины, устанавливаемой на любую из множества пошагово разнесенных частот в диапазоне частот сигнала глубины ниже 1 кГц, для обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, и который также подвергается воздействию низкочастотных электромагнитных шумов с частотами ниже 1 кГц, которые могут изменяться в указанной области, и выполнен с возможностью передачи сигнала данных, который, по меньшей мере, характеризует ориентацию передатчика, в диапазоне частот данных выше 1 кГц; и
портативное устройство, выполненное с возможностью сканирования указанного множества пошагово разнесенных частот ниже 1 кГц для измерения электромагнитных шумов на каждой из указанного множества пошагово разнесенных частот для идентификации по меньшей мере одной частоты с низким шумом для установления указанной частоты глубины в передатчике для динамического позиционирования указанной частоты сигнала глубины относительно указанного низкочастотного шума.
42. Система по концепции 39, в которой портативное устройство выполнено с возможностью передачи указанной идентифицированной частоты с низким шумом в передатчик для использования в качестве указанной частоты сигнала глубины.
43. Портативное устройство в качестве части системы, содержащей передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, содержащее
приемник, выполненный с возможностью
(i) сканирования множества пошагово разнесенных частот ниже 1 кГц для измерения электромагнитных шумов на каждой из указанного множества пошагово разнесенных частот для идентификации по меньшей мере одной частоты с низким шумом для использования указанным передатчиком в качестве указанной частоты глубины для динамического позиционирования указанной частоты сигнала глубины относительно указанного низкочастотного шума и для идентификации по меньшей мере одной частоты сигнала данных в диапазоне частот данных выше 1 кГц для передачи из указанного передатчика, чтобы охарактеризовать по меньшей мере один параметр ориентации указанного передатчика; и
(ii) обнаружения указанного сигнала глубины во время рабочей процедуры, по меньшей мере, чтобы охарактеризовать глубину расположения передатчика, и обнаружения указанного сигнала данных, по меньшей мере, чтобы выделить указанный параметр ориентации во время рабочей процедуры.
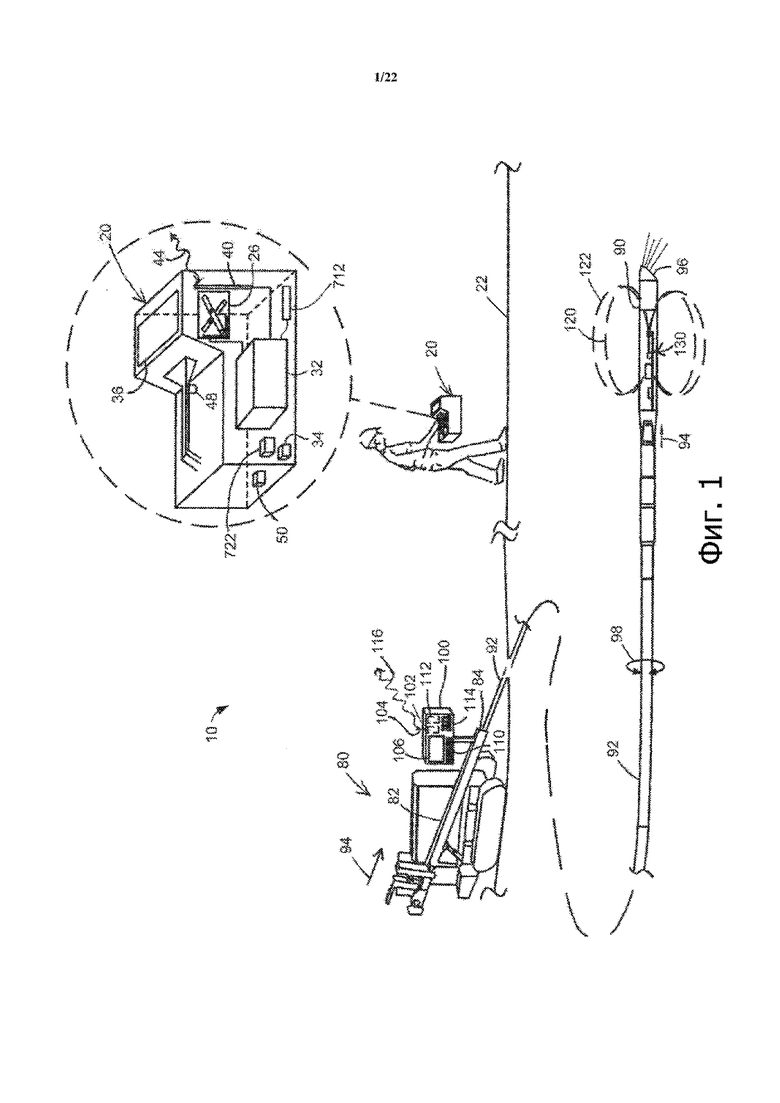
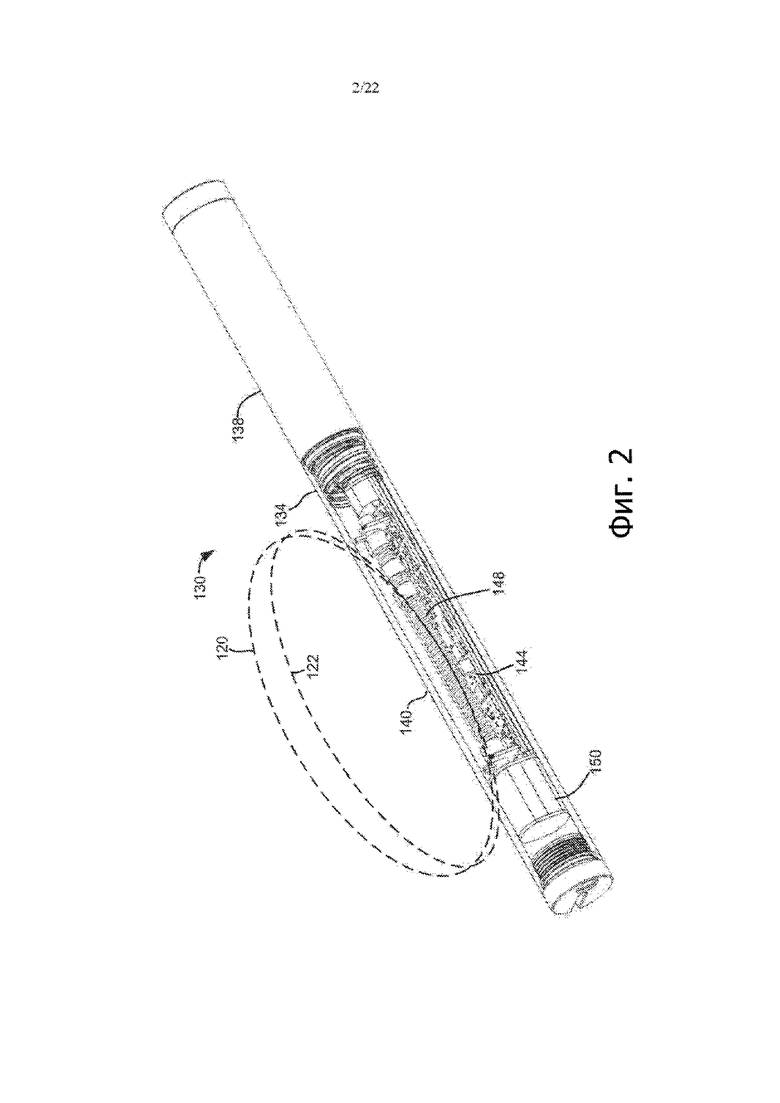
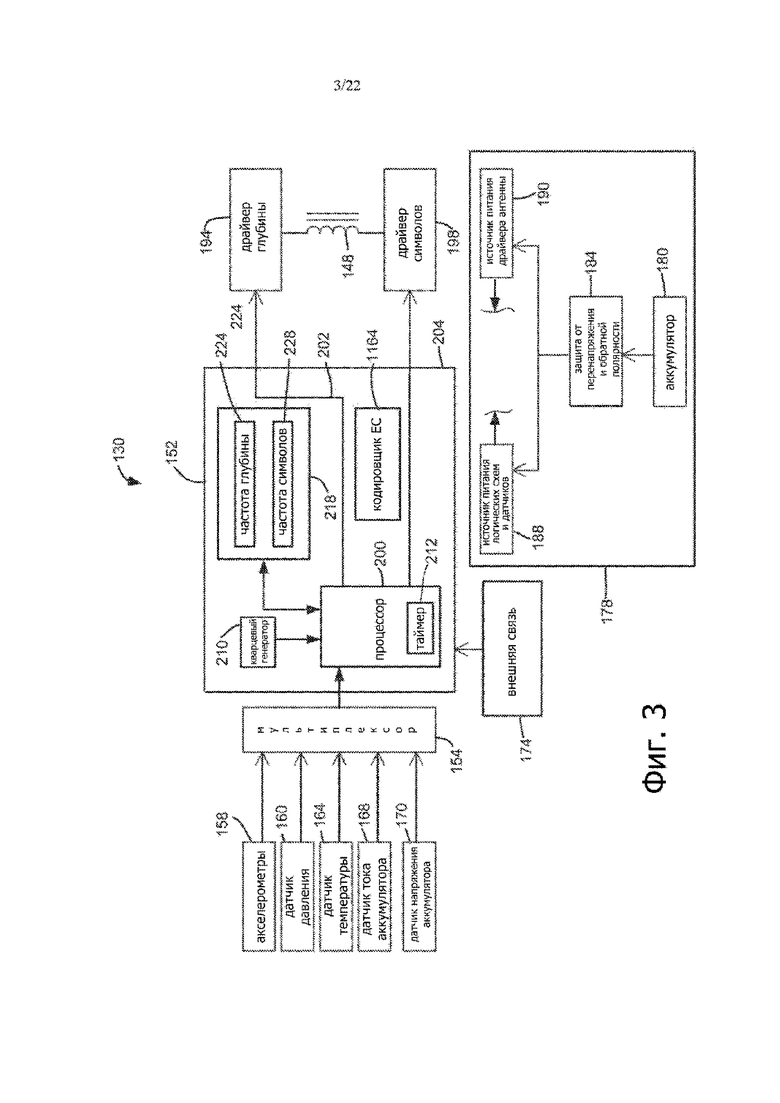
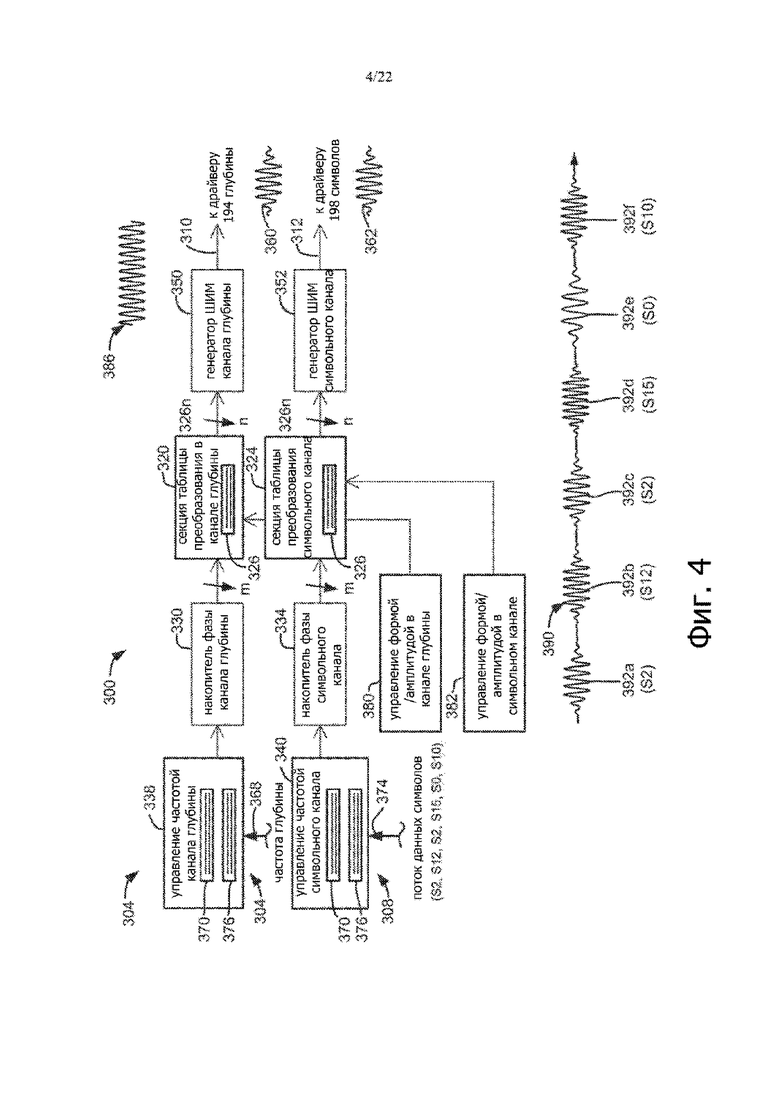
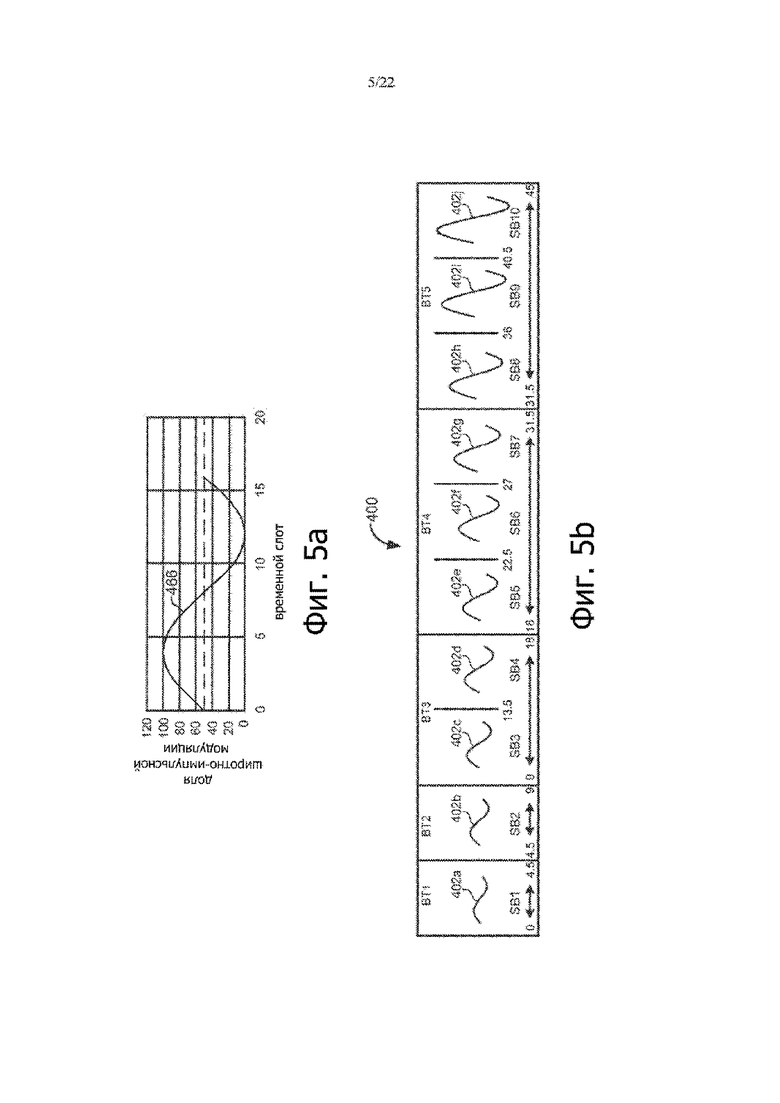
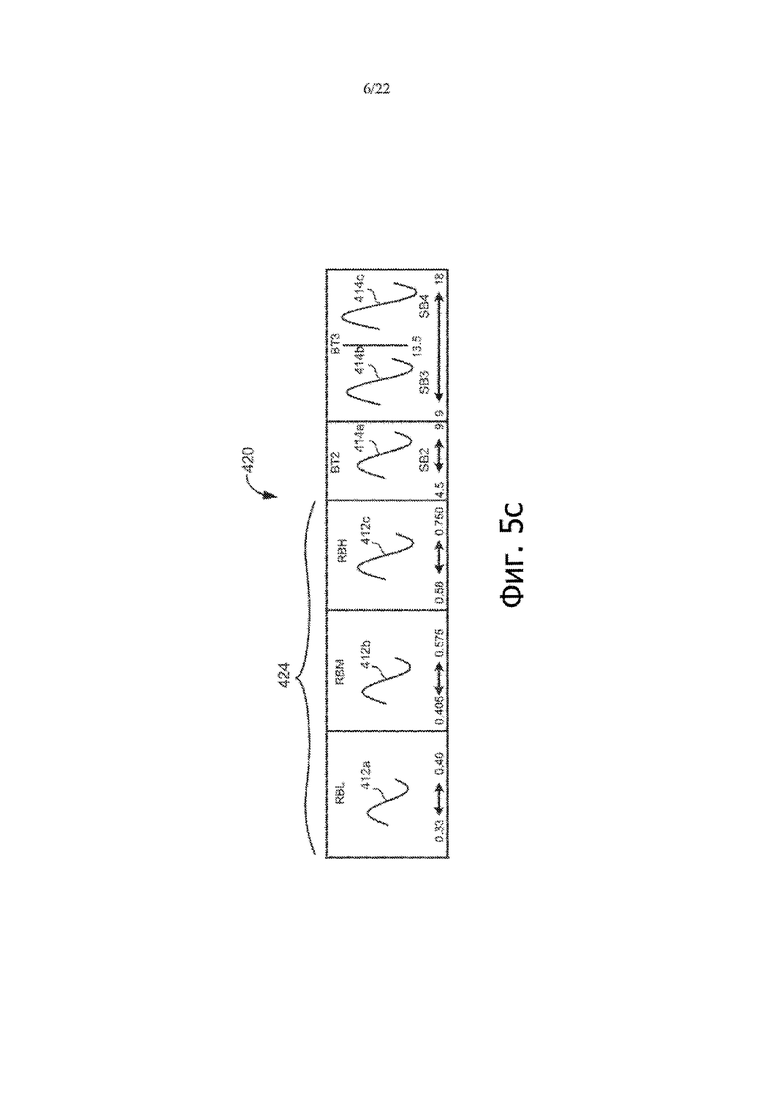
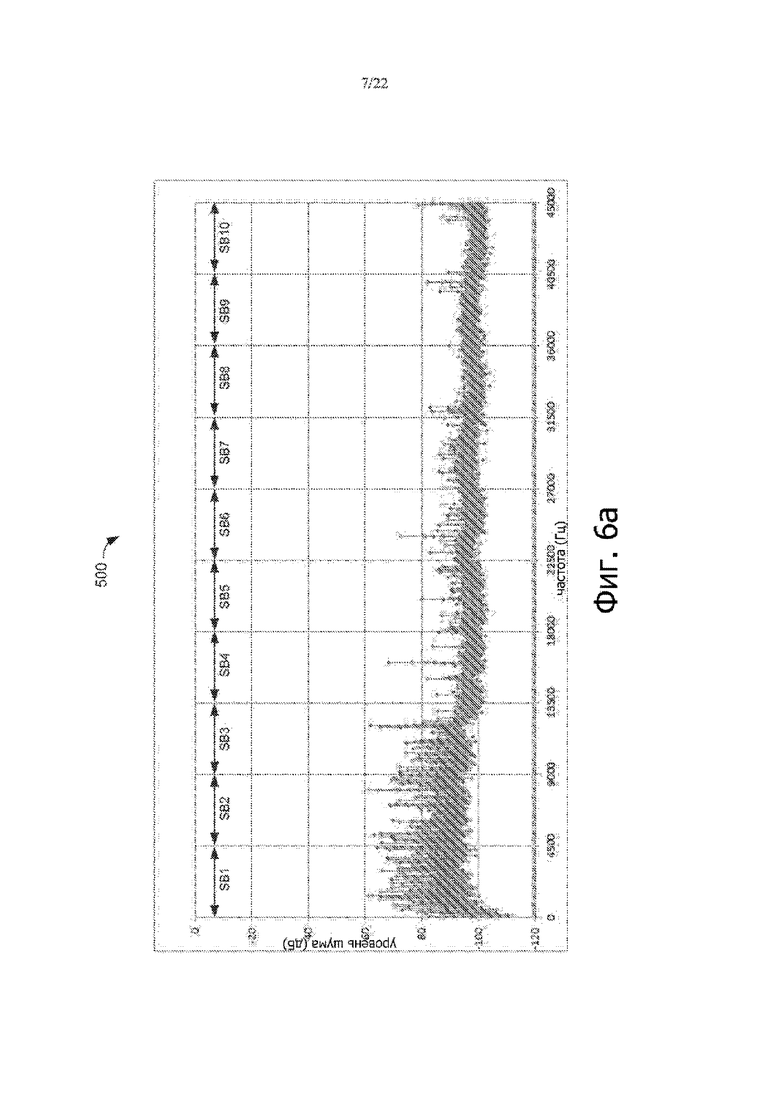
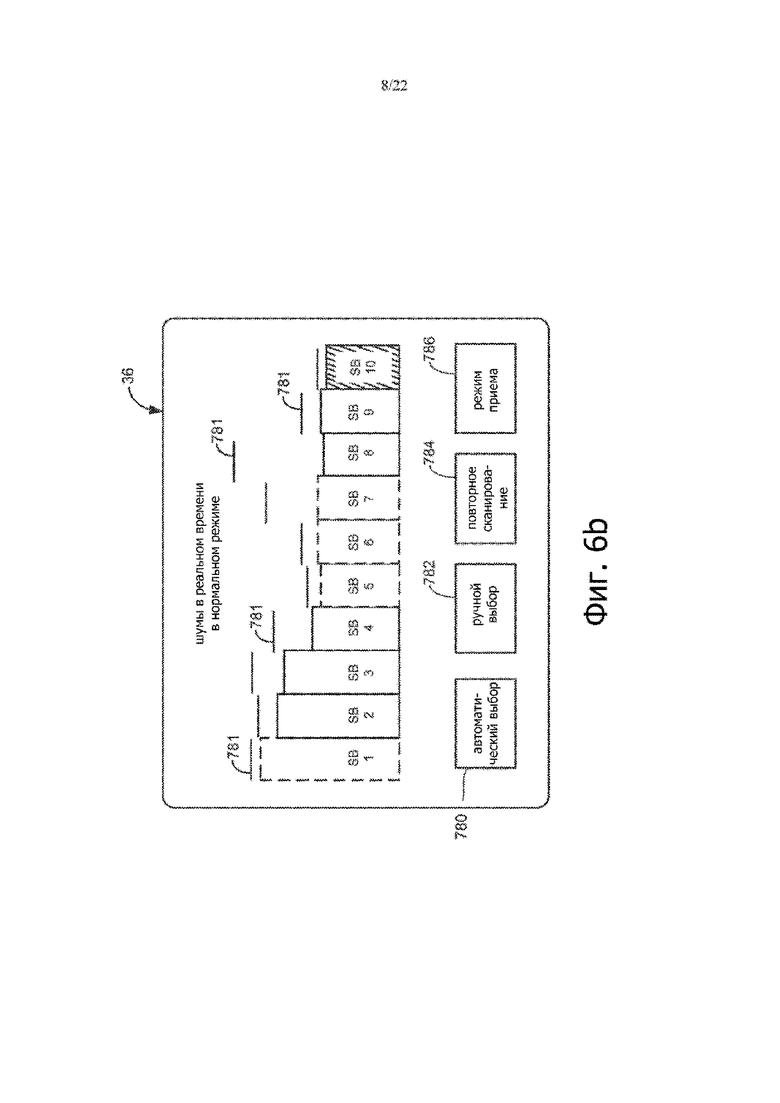
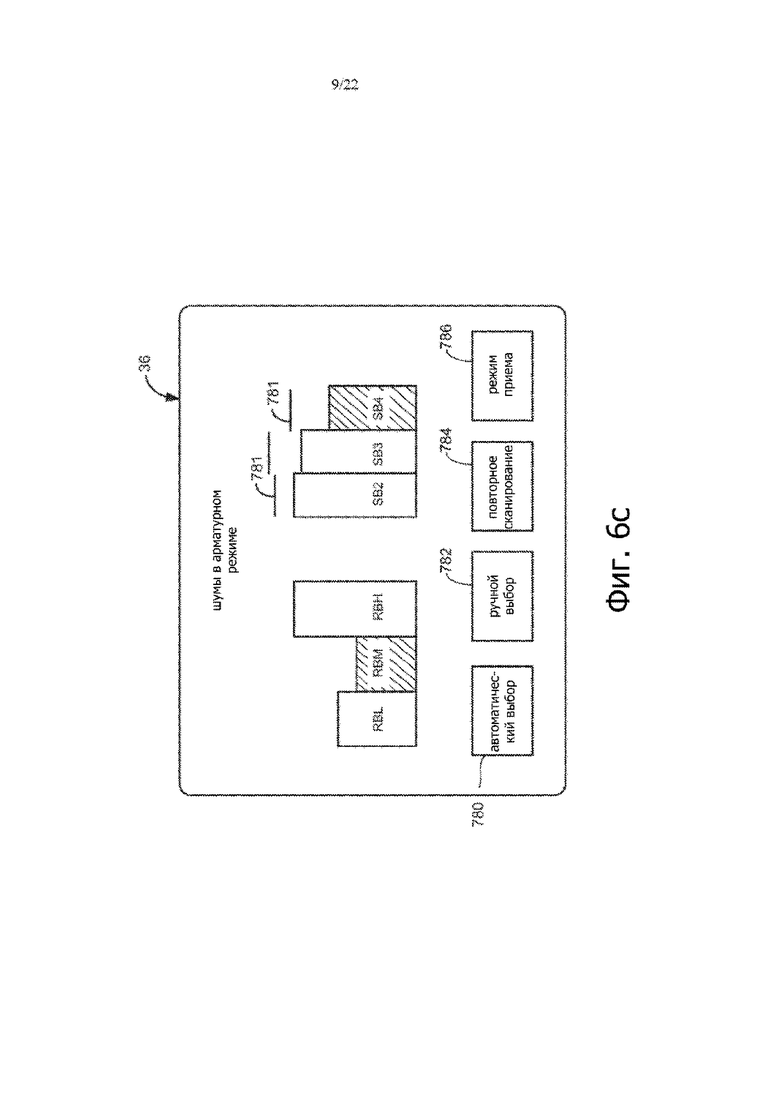
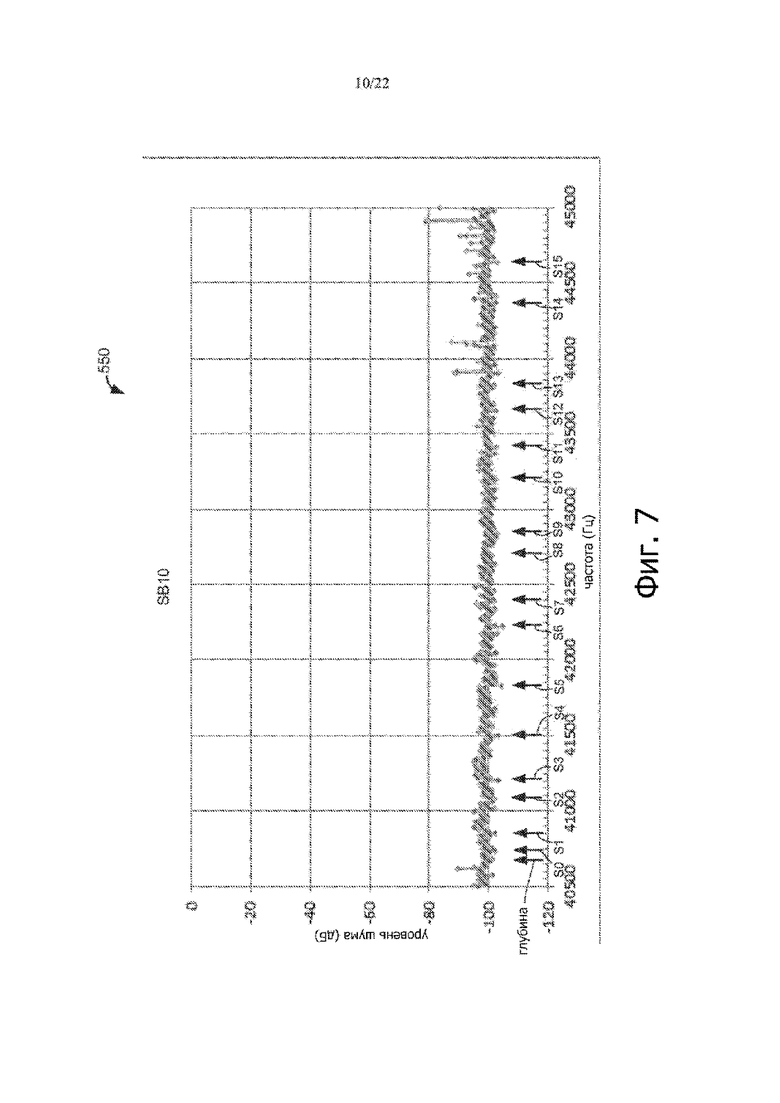
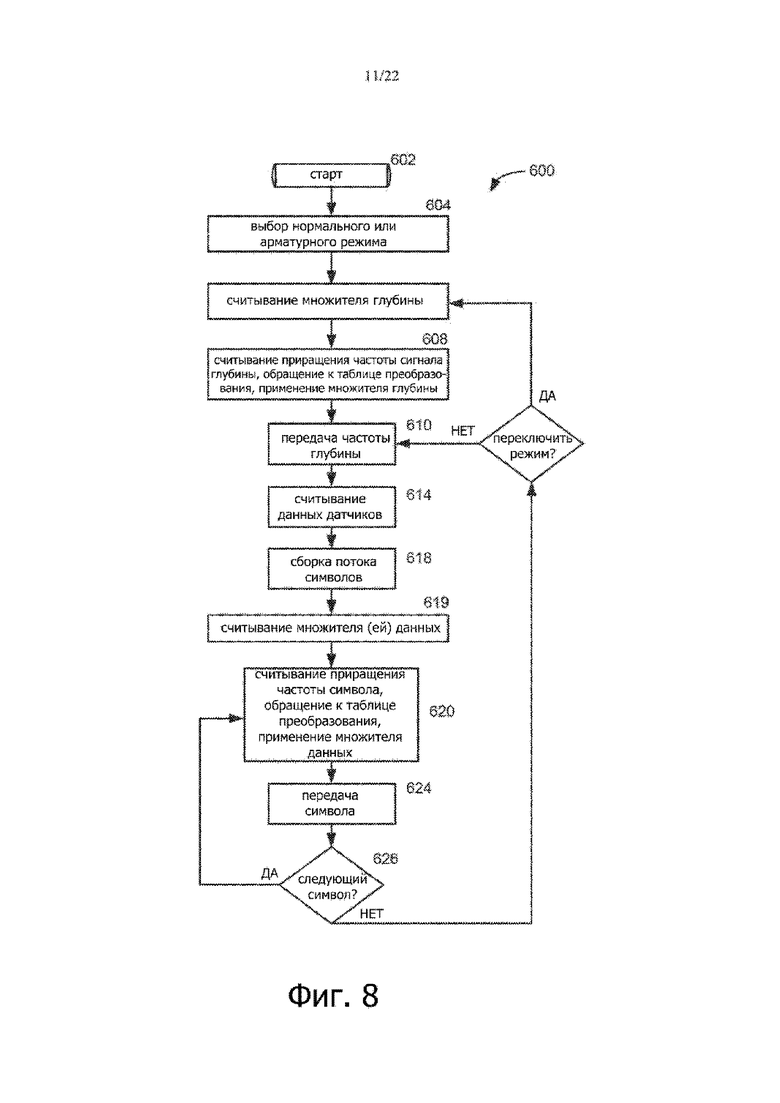
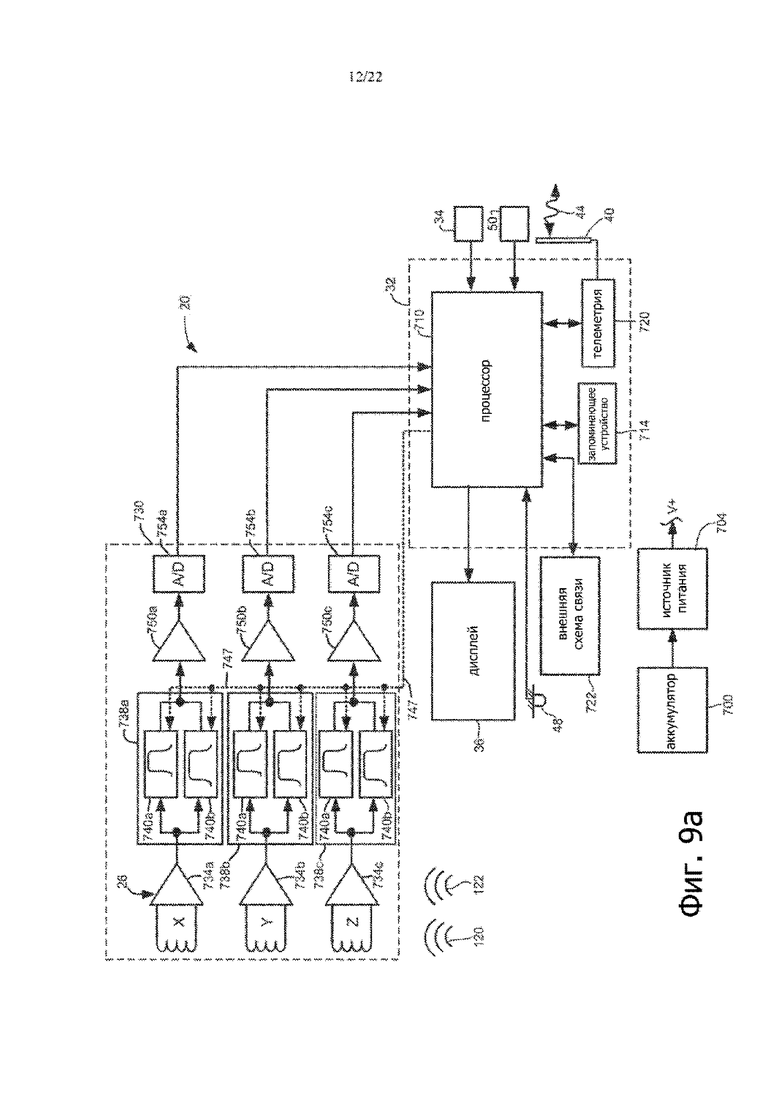
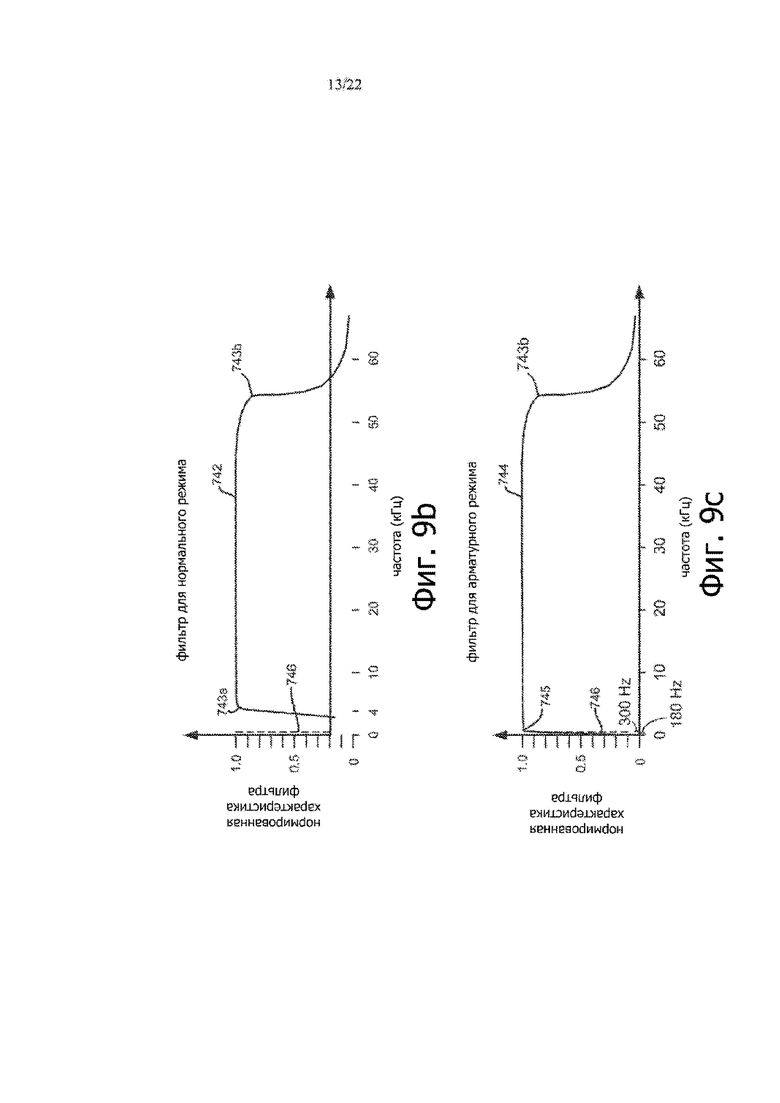
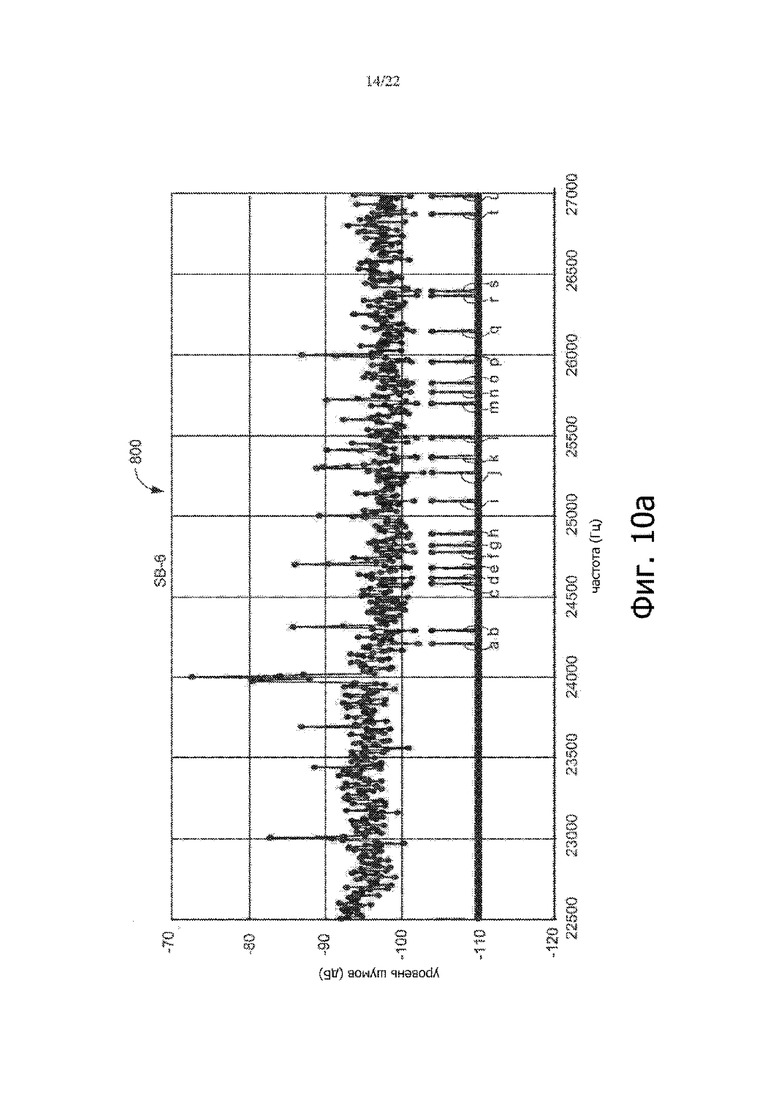
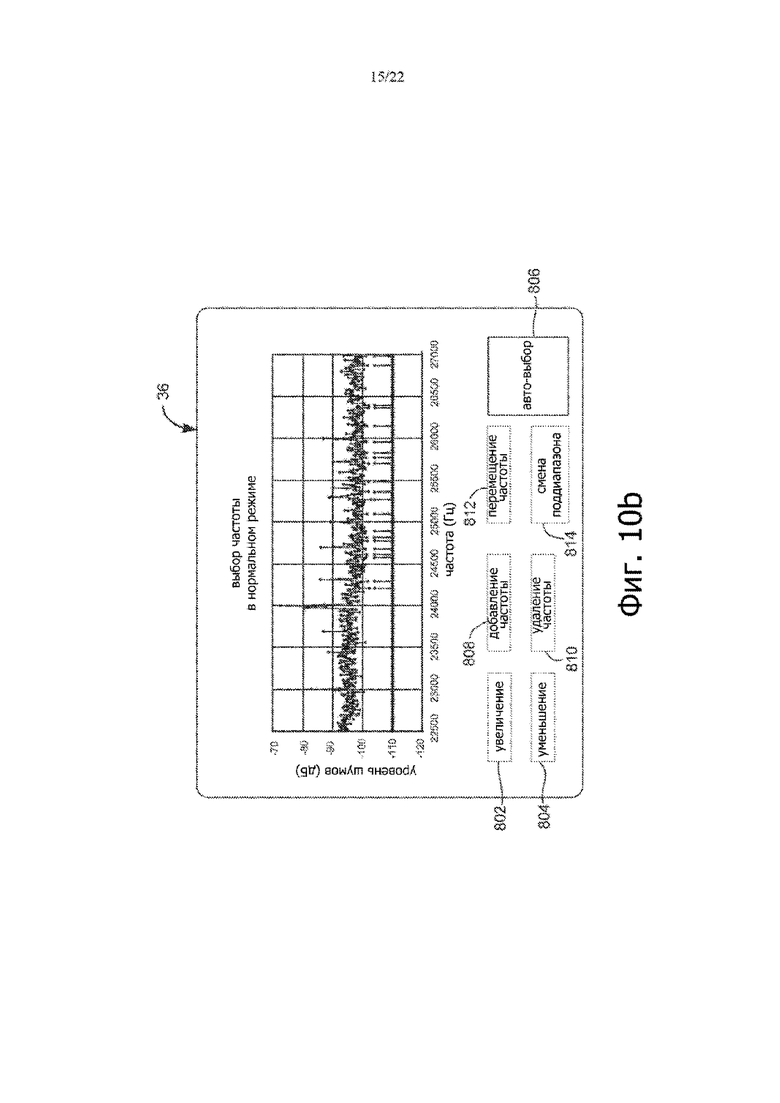
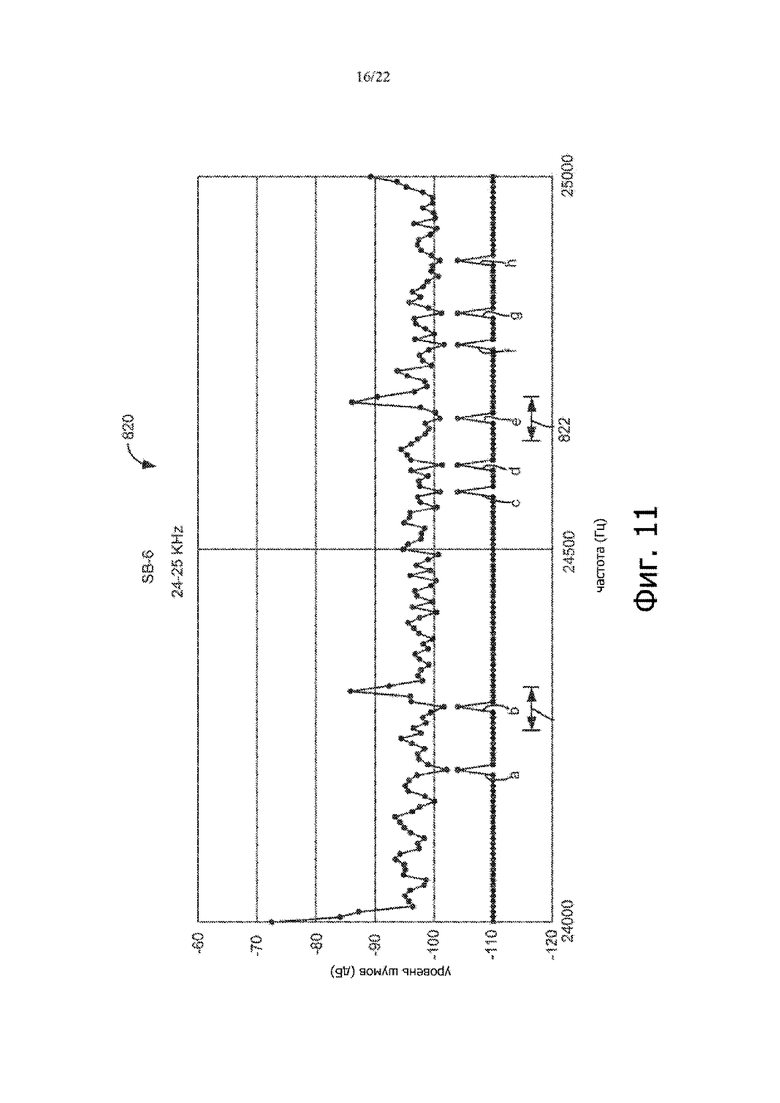
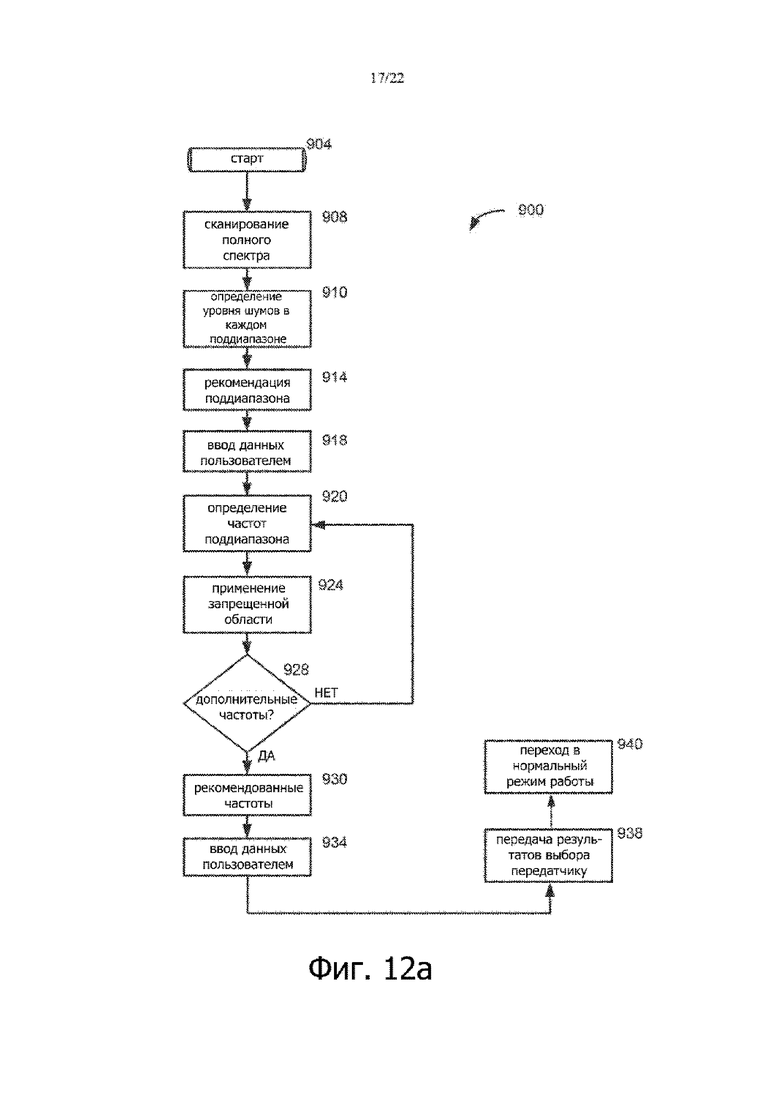
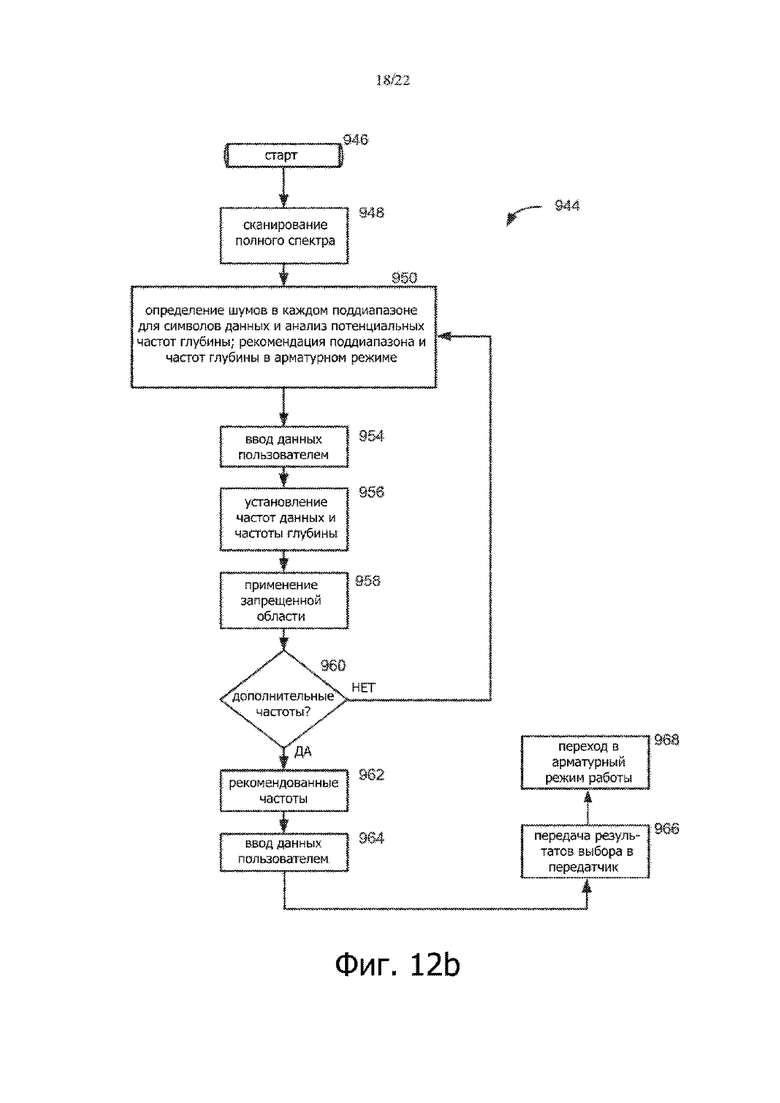
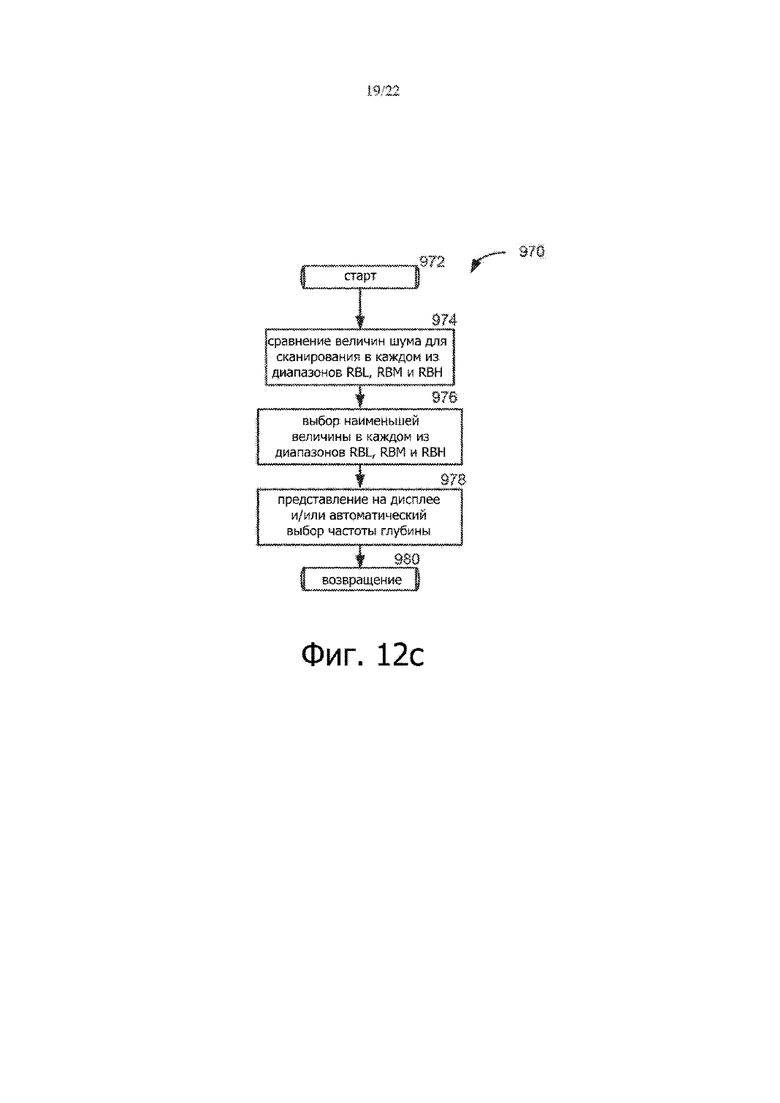
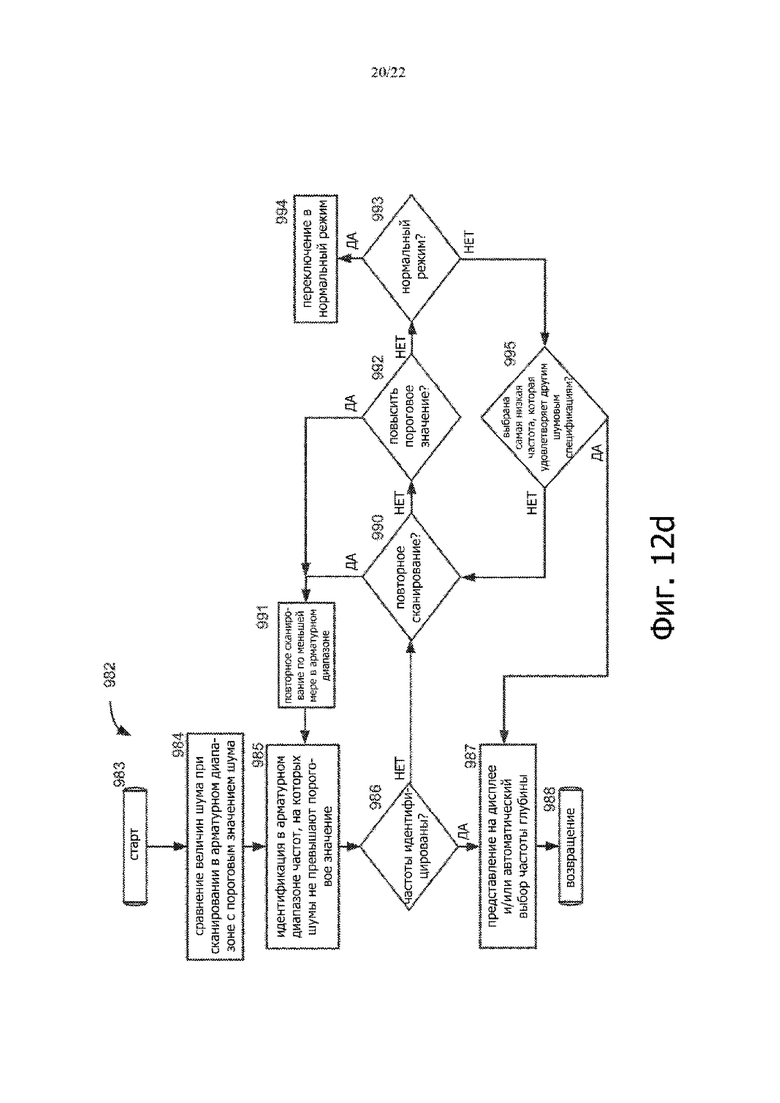
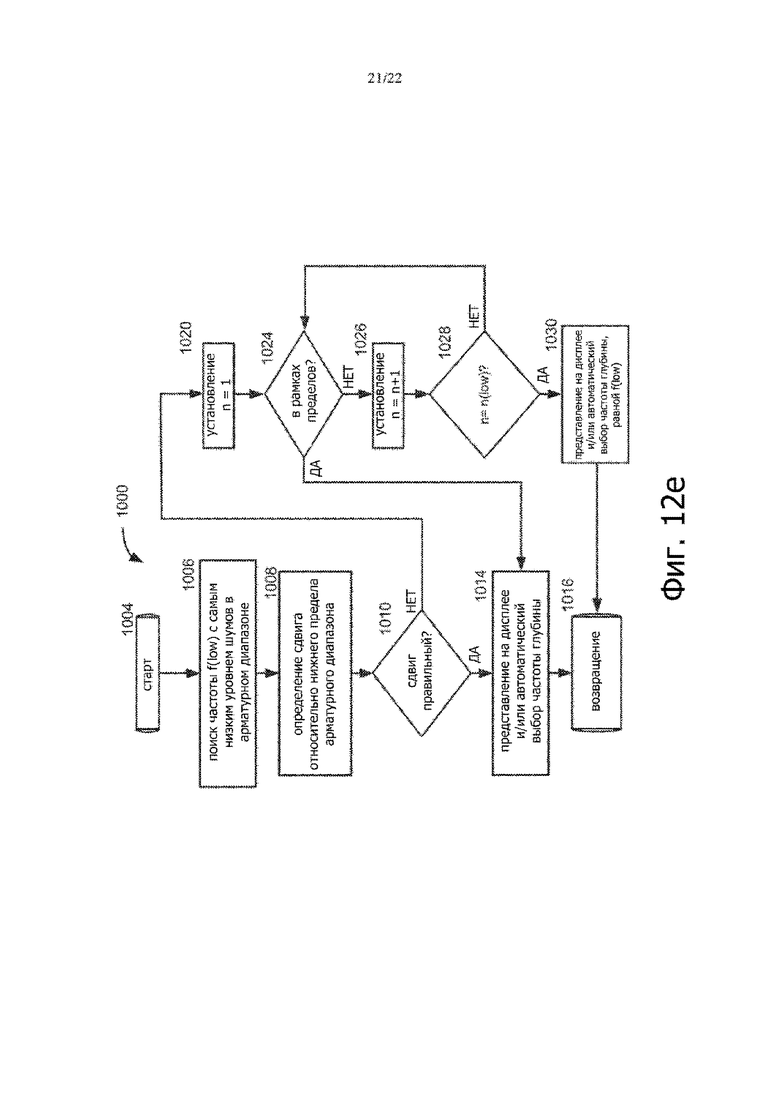
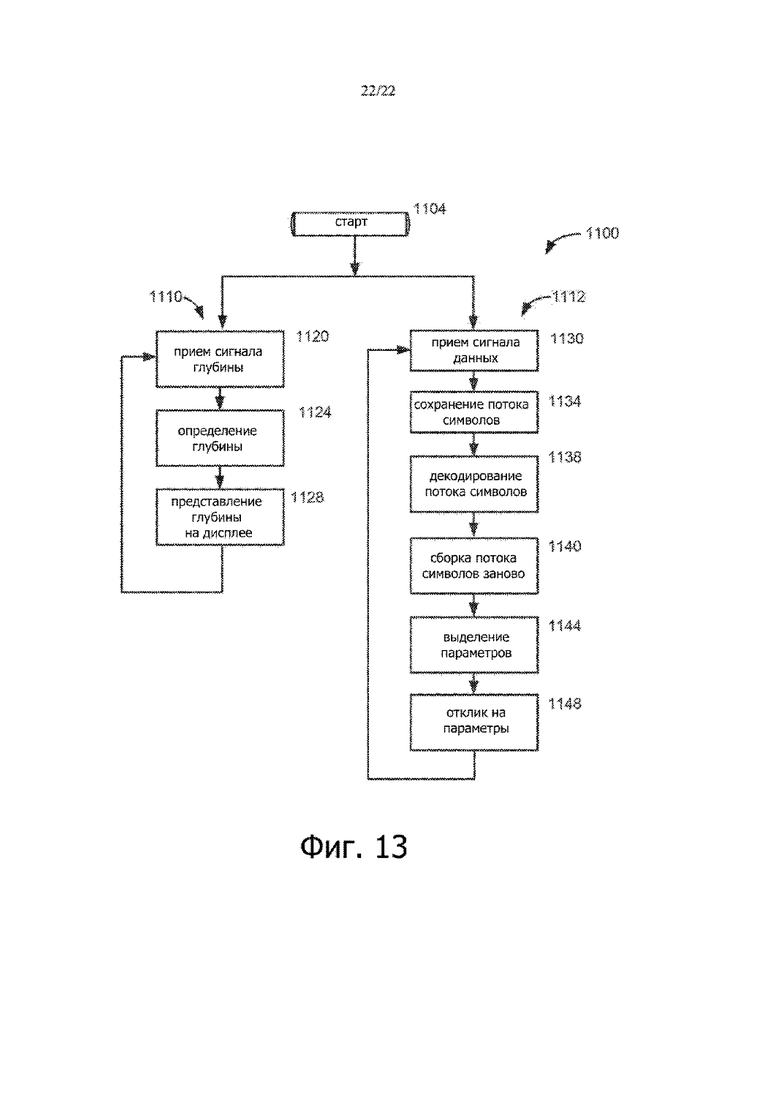
Группа изобретений относится к средствам связи при горизонтальном направленном бурении. Передатчик для использования в сочетании с системой горизонтального направленного бурения, содержащей бурильную колонну, проходящую от бурового станка к погруженному в землю инструменту, служащему опорой для передатчика, содержит антенну, один или более одного датчиков для генерации данных датчиков. Драйвер антенны для электрического возбуждения антенны предназначен для излучения сигнала глубины в ответ на входной драйверный сигнал глубины для надземного приема для использования при определении глубины указанного погруженного в землю инструмента. Драйвер антенны предназначен для электрического возбуждения антенны в ответ на входной драйверный сигнал данных, для того чтобы излучать по меньшей мере один сигнал данных, характеризующий данные датчиков, с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем у сигнала глубины, для надземного выделения указанных данных датчиков. Процессор выполнен с возможностью генерации указанного входного драйверного сигнала глубины на частоте сигнала глубины и с возможностью генерации указанного входного драйверного сигнала данных, характеризующего указанные данные датчиков для управления мощностью передачи сигнала глубины относительно мощности передачи сигнала данных, так чтобы одна дальность приема указанного сигнала глубины соответствовала другой отличающейся дальности приема указанного сигнала данных. Заявлены варианты системы горизонтального бурения, портативного устройства в качестве части системы горизонтального направленного бурения. Достигается технический результат – повышение эффективности подавления пассивных помех при направленном бурении посредством балансирования мощности передачи между сигналом глубины и сигналом данных. 9 н. и 34 з.п. ф-лы, 24 ил., 5 табл.
1. Передатчик для использования в сочетании с системой горизонтального направленного бурения, содержащей бурильную колонну, проходящую от бурового станка к погруженному в землю инструменту, который служит опорой для передатчика, так что выдвижение и отведение назад бурильной колонны перемещает погруженный в землю инструмент под землей в ходе подземных работ, содержащий:
антенну;
один или более одного датчиков для генерации данных датчиков;
драйвер антенны для электрического возбуждения антенны, с тем чтобы излучать сигнал глубины в ответ на входной драйверный сигнал глубины для надземного приема для использования при определении глубины указанного погруженного в землю инструмента, а также для электрического возбуждения антенны в ответ на входной драйверный сигнал данных, для того чтобы излучать по меньшей мере один сигнал данных, характеризующий данные датчиков, с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем у сигнала глубины, для надземного выделения указанных данных датчиков, и
процессор, выполненный с возможностью генерации указанного входного драйверного сигнала глубины на частоте сигнала глубины и с возможностью генерации указанного входного драйверного сигнала данных, характеризующего указанные данные датчиков, таким образом, чтобы управлять мощностью передачи сигнала глубины относительно мощности передачи сигнала данных, так чтобы одна дальность приема указанного сигнала глубины соответствовала другой отличающейся дальности приема указанного сигнала данных.
2. Передатчик по п. 1, в котором процессор дополнительно выполнен с возможностью регулирования указанной дальности приема сигнала данных в сочетании с регулированием указанной дальности приема сигнала глубины.
3. Передатчик по п. 2, в котором процессор выполнен с возможностью регулировать указанную дальность приема сигнала данных в сочетании с указанной дальностью приема сигнала глубины таким образом, чтобы полная мощность, потребляемая передатчиком, не превысила заданный предел.
4. Передатчик по п. 1, в котором частота сигнала глубины выбирается в пределах диапазона частот сигнала глубины.
5. Передатчик по п. 4, в котором процессор выполнен с возможностью регулирования указанного входного драйверного сигнала глубины таким образом, чтобы дальность приема сигнала глубины была равна дальности приема сигнала данных для любой выбранной частоты сигнала глубины в пределах указанного диапазона частот сигнала глубины.
6. Передатчик по п. 4, в котором указанный входной драйверный сигнал глубины представляет собой синусоидальный сигнал, имеющий амплитуду, и указанный процессор выполнен с возможностью регулировать указанную дальность приема сигнала глубины путем изменения указанной амплитуды на основе, по меньшей мере частично, конкретной позиции указанного сигнала глубины в указанном диапазоне частот сигнала глубины.
7. Передатчик по п. 1, в котором процессор выполнен с возможностью генерирования указанных входного драйверного сигнала глубины и входного драйверного сигнала данных так, что сигналу глубины выделяется более высокая мощность, чем сигналу глубины, чтобы увеличить дальность приема сигнала данных, когда, в противном случае, дальность приема сигнала данных была бы меньше дальности приема сигнала данных, если каждый из сигналов – сигнал глубины и сигнал данных - передаются с одинаковой мощностью.
8. Передатчик по п. 1, в котором сигнал глубины меньше 1 кГц.
9. Передатчик по п. 1, в котором сигнал глубины находится в диапазоне от 300 Гц до 1 кГц, включительно.
10. Передатчик для использования в сочетании с системой горизонтального направленного бурения, содержащей бурильную колонну, проходящую от бурового станка к погруженному в землю инструменту, который служит опорой для передатчика, так что выдвижение и отведение назад бурильной колонны перемещает погруженный в землю инструмент под землей в ходе подземных работ, содержащий:
антенну:
один или более одного датчиков для генерации данных датчиков;
драйвер антенны для электрического возбуждения антенны, с тем чтобы излучать сигнал глубины в ответ на драйверный сигнал глубины для надземного приема для определения глубины погруженного в землю инструмента, и для электрического возбуждения антенны, с тем чтобы излучать сигнал данных, характеризующий данные датчиков, с использованием по меньшей мере одной частоты сигнала данных, которая выше по частоте, чем указанный сигнал глубины, для надземного выделения указанных данных датчиков; и
процессор, выполненный с возможностью генерации указанного драйверного сигнала глубины на частоте сигнала глубины и с возможностью генерации драйверного сигнала данных на указанной частоте сигнала данных, с тем чтобы управлять первой дальностью приема указанного сигнала глубины относительно второй дальности приема указанного сигнала данных.
11. Система горизонтального направленного бурения, содержащая:
передатчик, выполненный с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины в диапазоне частот сигнала глубины ниже 1 кГц, для обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, и который также подвержен воздействию электромагнитных шумов, которые могут изменяться в пределах указанной области; и
портативное устройство, выполненное с возможностью сканирования множества частот в указанном диапазоне частот сигнала глубины для измерения электромагнитных шумов на каждой частоте из указанного множества частот и для идентификации на основе измеренных шумов самой низкой частоты из указанных частот в качестве потенциальной частоты глубины, которая удовлетворяет требованию низких шумов.
12. Система по п. 11, в которой при оценке требования низких шумов сравнивается измеренный шум для каждой частоты из указанного множества частот с пороговой величиной в качестве части процедуры идентификации указанной потенциальной частоты глубины.
13. Система по п. 11, в которой требование низких шумов основано на относительном сравнении измеренных электромагнитных шумов на каждой частоте из указанного множества частот.
14. Система по п. 11, в которой портативное устройство выполнено с возможностью рекомендовать пользователю указанную потенциальную частоту глубины.
15. Система по п. 11, в которой портативное устройство выполнено с возможностью автоматического выбора потенциальной частоты глубины в качестве указанной частоты глубины.
16. Система по п. 15, в которой портативное устройство выполнено с возможностью для пользователя не принимать указанную потенциальную частоту глубины в качестве частоты глубины.
17. Система по п. 11, в которой портативное устройство выполнено с возможностью, по меньшей мере, запрашивать у пользователя подтверждение предпочтительной частоты глубины.
18. Система по п. 11, в которой указанное портативное устройство выполнено с возможностью идентификации по меньшей мере одной потенциальной резервной частоты глубины из указанного множества частот, которая выше указанной потенциальной частоты глубины, причем является следующей наиболее низкой частотой в указанном диапазоне частот, среди указанного множества частот, которые удовлетворяют указанному требованию по шумам.
19. Система по п. 18, в которой портативное устройство выполнено с возможностью перехода в режим сканирования шумов в реальном времени для сканирования электромагнитных шумов вдоль предполагаемой трассы по меньшей мере на предпочтительной частоте глубины и на указанной резервной частоте глубины и указания оператору уровня шумов в реальном времени для указанной предпочтительной частоты глубины и указанной резервной частоты глубины.
20. Система по п. 11, в которой портативное устройство дополнительно выполнено с возможностью сканирования другого множества частот выше 1 кГц для выбора по меньшей мере одной частоты сигнала данных на основе измерений электромагнитных шумов на каждой частоте из указанного множества частот выше 1 кГц, а передатчик дополнительно содержит один или более одного датчиков, который генерирует данные датчиков, и выполнен с возможностью передачи указанных данных датчиков с использованием, по меньшей мере, указанной частоты сигнала данных.
21. Портативное устройство в качестве части системы горизонтального направленного бурения, в которой передатчик выполнен с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины, содержащее
антенну, имеющую выход; и
приемник, выполненный с возможностью сканирования множества частот в диапазоне частот сигнала глубины ниже 1 кГц для измерения электромагнитных шумов на каждой частоте из указанного множества частот на основе выходного сигнала антенны и с возможностью идентификации в качестве потенциальной частоты глубины такой частоты, которая является наиболее низкой частотой из указанных частот и удовлетворяет требованию низких шумов.
22. Портативное устройство в качестве части системы горизонтального направленного бурения, в которой передатчик выполнен с возможностью перемещения под землей в области во время рабочей процедуры, передавая при этом сигнал глубины, содержащее
антенну, имеющую выход; и
приемник, выполненный с возможностью измерения электромагнитных шумов на основе выходного сигнала антенны по меньшей мере в двух разных частотных диапазонах ниже 1 кГц посредством пошагового сканирования каждого частотного диапазона для генерации множества пошаговых отсчетов уровня шумов в каждом частотном диапазоне и представления на дисплее одной или более одной потенциальных частот глубины для каждого частотного диапазона, для выбора оператором на основе указанных пошаговых отсчетов уровня шумов.
23. Портативное устройство по п. 22, в котором приемник дополнительно выполнен с возможностью выбора потенциальной частоты глубины для каждого частотного диапазона как соответствующей наиболее низкому значению из указанных пошаговых отсчетов уровня шума из каждого частотного диапазона и с возможностью, по меньшей мере, представления на дисплее указанной потенциальной частоты глубины для каждого частотного диапазона для выбора одной из указанных потенциальных частот глубины в качестве частоты глубины для указанного сигнала глубины.
24. Портативное устройство по п. 23, выполненное с возможностью идентификации, по меньшей мере, указанной частоты глубины для передатчика для передачи во время указанной рабочей процедуры.
25. Портативное устройство по п. 23, выполненное с возможностью представления группы потенциальных частот глубины для выбора дополнительной частоты из указанных потенциальных частот глубины в качестве резервной частоты глубины для указанного сигнала глубины.
26. Портативное устройство по п. 25, выполненное с возможностью дополнительной идентификации указанной частоты глубины и указанной резервной частоты глубины для передатчика для передачи из портативного устройства во время указанной рабочей процедуры.
27. Портативное устройство по п. 23, выполненное с возможностью автоматического выбора одной из указанных потенциальных частот глубины в качестве указанной частоты глубины указанного сигнала глубины.
28. Портативное устройство по п. 22, выполненное с возможностью перехода в режим представления на дисплее уровня шума в реальном времени после представления на дисплее указанной группы потенциальных частот глубины, с тем чтобы непрерывно представлять на дисплее оператору отсчеты уровня шумов в реальном времени для каждой потенциальной частоты глубины.
29. Портативное устройство по п. 28, выполненное с возможностью выбора оператором одной из потенциальных частот глубины в качестве указанной частоты глубины указанного сигнала глубины во время нахождения в режиме представления на дисплее уровня шумов в реальном времени.
30. Портативное устройство по п. 22, выполненное с возможностью приема сигнала глубины от передатчика во время рабочей процедуры для определения глубины передатчика.
31. Система горизонтального направленного бурения, содержащая:
передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины, которая является выбираемой в диапазоне частот сигнала глубины ниже 1 кГц, для обеспечения, по меньшей мере, некоторой устойчивости к пассивным помехам, и который также подвергается воздействию электромагнитных шумов, которые могут изменяться в указанной области; и
портативное устройство, выполненное с возможностью измерения электромагнитных шумов на основе выходного сигнала антенны по меньшей мере в двух разных частотных диапазонах ниже 1 кГц посредством пошагового сканирования каждого частотного диапазона для формирования множества пошаговых отсчетов уровня шумов в каждом частотном диапазоне и с возможностью представления на дисплее одной или более одной потенциальных частот глубины для каждого частотного диапазона, для выбора оператором на основе указанных пошаговых отсчетов уровня шумов.
32. Система по п. 31, в которой портативное устройство дополнительно выполнено с возможностью выбора указанной потенциальной частоты глубины для каждого частотного диапазона, как соответствующей наиболее низкому отсчету из указанных пошаговых отсчетов уровня шумов из каждого частотного диапазона, и с возможностью, по меньшей мере, представления на дисплее указанной потенциальной частоты глубины для каждого частотного диапазона для выбора одной из указанных потенциальных частот глубины в качестве частоты глубины для указанного сигнала глубины.
33. Портативное устройство в качестве части системы горизонтального направленного бурения, в которой передатчик выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины и поток данных на одной или более одной частотах данных, который, по меньшей мере, характеризует параметр ориентации передатчика, содержащее
антенну для приема указанного сигнала глубины и указанных частот данных для формирования выходного сигнала;
секцию переключаемого фильтра для ограничения выходного сигнала антенны в нормальном режиме одним частотным диапазоном выше заданной частоты, с тем чтобы пропускать указанный сигнал глубины и указанный поток данных на одной или более одной частотах, и для ограничения указанного выходного сигнала антенны в арматурном режиме другой частотной полосой, с тем чтобы пропускать указанный сигнал глубины на частоте ниже указанной заданной частоты и пропускать указанный поток данных, включающий в себя одну или более одной частот выше указанной заданной частоты; и
процессор, выполненный с возможностью переключения указанной секции переключаемого фильтра между нормальным режимом и арматурным режимом для выделения указанного сигнала глубины и указанного потока данных в ответ на выбор нормального режима и арматурного режима.
34. Портативное устройство по п. 33, в котором переключаемый фильтр содержит фильтр нормального режима для указанного нормального режима и арматурный фильтр для указанного арматурного режима.
35. Портативное устройство по п. 33, в котором указанная заданная частота равна 1 кГц.
36. Портативное устройство по п. 33, в котором указанный арматурный фильтр включает низкочастотный изгиб на частоте ниже 1 кГц, а указанный фильтр нормального режима включает низкочастотный изгиб на частоте выше 1 кГц.
37. Портативное устройство по п. 34, в котором указанный арматурный фильтр определяет арматурную полосу пропускания, ширина которой больше ширины полосы пропускания нормального режима, которая определяется указанным фильтром нормального режима.
38. Портативное устройство по п. 37, в котором первый верхний изгиб указанной арматурной полосы пропускания совпадает со вторым верхним изгибом указанной полосы пропускания нормального режима.
39. Портативное устройство по п. 37, в котором указанная арматурная полоса пропускания пропускает дополнительный низкочастотный шум по сравнению с указанной полосой пропускания нормального режима, причем указанное портативное устройство дополнительно выполнено с возможностью сканирования электромагнитных шумов, по меньшей мере, ниже указанной заданной частоты для идентификации по меньшей мере одной частоты с низким шумом для использования передатчиком в качестве частоты глубины арматурного режима в указанном арматурном диапазоне для динамического позиционирования указанной частоты арматурного режима относительно указанного дополнительного низкочастотного шума.
40. Портативное устройство по п. 39, в котором портативное устройство выполнено с возможностью передачи указанной идентифицированной частоты с низким шумом в передатчик для использования в качестве указанной частоты сигнала глубины.
41. Система горизонтального направленного бурения, содержащая:
передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, передавая при этом сигнал глубины на частоте глубины, устанавливаемой на любую из множества пошагово разнесенных частот в диапазоне частот глубины ниже 1 кГц, для обеспечения по меньшей мере некоторой устойчивости к пассивным помехам, и который также подвергается воздействию электромагнитных шумов с частотами ниже 1 кГц, которые могут изменяться в указанной области, и выполнен с возможностью передачи сигнала данных, который, по меньшей мере, характеризует ориентацию передатчика, в диапазоне частот данных выше 1 кГц; и
портативное устройство, выполненное с возможностью сканирования указанного множества пошагово разнесенных частот ниже 1 кГц для измерения электромагнитных шумов на каждой из указанного множества пошагово разнесенных частот для идентификации по меньшей мере одной частоты с низким шумом для установления указанной частоты глубины в передатчике для динамического позиционирования указанной частоты глубины относительно указанного электромагнитного шума.
42. Система по п. 41, в которой портативное устройство выполнено с возможностью передачи указанной идентифицированной частоты с низким шумом в передатчик для использования в качестве указанной частоты глубины.
43. Портативное устройство в качестве части системы горизонтального направленного бурения, содержащей передатчик, который выполнен с возможностью перемещения в области под землей во время рабочей процедуры, содержащее
приемник, выполненный с возможностью
(i) сканирования множества пошагово разнесенных частот ниже 1 кГц для измерения электромагнитных шумов на каждой из указанного множества пошагово разнесенных частот для идентификации по меньшей мере одной частоты с низким шумом для использования указанным передатчиком в качестве указанной частоты глубины для динамического позиционирования указанной частоты глубины относительно указанного электромагнитного шума и для идентификации по меньшей мере одной частоты данных в диапазоне частот данных выше 1 кГц для передачи из указанного передатчика, чтобы охарактеризовать по меньшей мере один параметр ориентации указанного передатчика; и
(ii) обнаружения указанного сигнала глубины во время рабочей процедуры, по меньшей мере, чтобы охарактеризовать глубину расположения передатчика, и обнаружения указанного сигнала данных, по меньшей мере, чтобы выделить указанный параметр ориентации во время рабочей процедуры.
| WO 2016037135 A1, 10.03.2016 | |||
| СИСТЕМА И СПОСОБ ТЕЛЕМЕТРИИ В СТВОЛЕ СКВАЖИНЫ | 2007 |
|
RU2444622C2 |
| СИСТЕМА И СПОСОБ СВЯЗИ ПО ЗАШУМЛЕННЫМ КАНАЛАМ СВЯЗИ | 2006 |
|
RU2419996C2 |
| US 7015697 B2, 21.03.2006 | |||
| WO 2013103976 A1, 11.07.2013. | |||

