РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с непредварительной патентной заявкой США № 14/845231, поданной 3 сентября 2015 г., предварительной патентной заявкой США № 62/046772, поданной 5 сентября 2014 г., предварительной патентной заявкой США № 62/080225, поданной 14 ноября 2014 г., и предварительной патентной заявкой США № 62/143104, поданной 4 марта 2014 г., каждая из которых, таким образом, включена в настоящий документ посредством ссылки в полном объеме.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящая заявка, в целом, относится к области связи, относящейся к подземному устройству и, в частности, к усовершенствованному протоколу связи с подземным устройством с использованием многобитового символа данных, и к соответствующим способам.
Метод, часто именуемый горизонтальным направленным бурением (HDD), можно использовать в целях установки коммунального оборудования без необходимости копать траншею. Типичная установка коммунального оборудования предусматривает использование бурового станка, имеющего бурильную колонну, которая поддерживает бурильный инструмент на дальнем или подземном конце бурильной колонны. Буровой станок продвигает бурильный инструмент сквозь толщу земли путем приложения осевого усилия к бурильной колонне. В ходе удлинения бурильной колонны осуществляется управление ориентацией бурильного инструмента для формирования пилотной скважины. После заканчивания пилотной скважины, дальний конец бурильной колонны присоединяется к устройству подъема из скважины, которое, в свою очередь, присоединяется к ведущему концу коммунального оборудования. Затем устройство подъема из скважины и коммунальное оборудование протягиваются через пилотную скважину посредством укорочения бурильной колонны для завершения установки. В ряде случаев, устройство подъема из скважины может содержать оборудование расширения снизу вверх, которое служит для увеличения диаметра пилотной скважины впереди коммунального оборудования, что позволяет устанавливать коммунальное оборудование, диаметр которого превышает первоначальный диаметр пилотной скважины.
Управление ориентацией бурильного инструмента можно осуществлять общеизвестным способом путем ориентирования асимметричной грани бурильного инструмента для отклонения в нужном направлении в земле при перемещении вперед. Для осуществления этого управления ориентацией, желательно отслеживать ориентацию бурильного инструмента на основании показаний датчика, полученных датчиками, которые образуют часть электронного модуля, который поддерживается бурильным инструментом. Показания датчика, например, могут модулировать сигнал определения местоположения, который передается электронным модулем для приема на земле портативным локатором или другим подходящим наземным устройством. В некоторых системах, электронный модуль может подавать несущий сигнал, модулированный показаниями датчика, на бурильную колонну, чтобы затем передавать сигнал на буровой станок, используя бурильную колонну как электрический проводник. Независимо от способа передачи данных датчика и при данной величине мощности передачи, существует ограниченная дальность передачи, который позволяет извлекать данные датчика с достаточной точностью. Дальность передачи может дополнительно ограничиваться такими факторами, как, например, электромагнитная помеха, присутствующая в рабочей области. Один традиционный подход, в попытке увеличить диапазон передачи, состоит в передаче данных от бурильного инструмента или другого подземного оборудования на частоте, которую заявители называют здесь ʺмагической частотойʺ. Последняя может определяться как несущая частота, которая заметно ослабляет помеху окружающей среды для обеспечения эффективной дальности приема, несмотря на самые разнообразные помехи окружающей среды, которые могут встречаться. Как будет рассмотрено далее, заявители утверждают, что такой магической частоты не существует, по меньшей мере, на основании применения любого рода обширной географической области и, в частности, на основании всемирного применения. Другой традиционный подход состоит в простом увеличении мощности передачи. Однако заявители понимают, что этот подход может иметь ограниченную ценность, в частности, когда подземный электронный модуль имеет батарейное питание. Еще один традиционный подход состоит в снижении скорости передачи данных, при которой данные модулируют сигнал определения местоположения. К сожалению, этот подход сопряжен с падением пропускной способности.
Вышеприведенные примеры уровня техники и связанные с ними ограничения служат для иллюстрации и не являются исключительными. Другие ограничения уровня техники будут ясны специалистам в данной области техники из описания изобретения и чертежей.
Сущность изобретения
В целом, здесь раскрыты протокол связи в системе направленного бурения; устройство и способ, использующие передача многобитовых символов данных.
Нижеследующие варианты осуществления и их аспекты описаны и проиллюстрированы в связи с системами, инструментами и способами, которые рассматриваются как примерные и иллюстративные, без ограничения объема. В различных вариантах осуществления, были решены или устранены одна или более из вышеописанных проблем, тогда как другие варианты осуществления относятся к другим усовершенствованиям.
В одном аспекте изобретения, описаны передатчик и соответствующий способ для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Передатчик включает в себя антенну и один или более датчиков для генерирования одного или более сигналов датчиков. Процессор выполнен с возможностью генерирования потока многобитовых символов на основании сигналов датчиков. Компоновка антенных возбудителей выполнена с возможностью электрического возбуждения антенны для излучения дипольного сигнала определения местоположения, в качестве сигнала глубины, для наземного приема, по меньшей мере, для использования при определении глубины подземного оборудования и для электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
В другом аспекте изобретения, описаны передатчик и соответствующий способ для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Передатчик включает в себя антенну и один или более датчиков для генерирования одного или более сигналов датчиков. Прямой цифровой синтезатор выполнен с возможностью генерирования потока символов, образованного множеством символов фиксированной частоты, и прямой цифровой синтезатор выполнен с возможностью формирования некоторой формы волны возбуждения для разных частот символа. Антенный возбудитель выполнен с возможностью электрического возбуждения антенны на основании потока символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
В еще одном аспекте изобретения, описаны передатчик и соответствующий способ для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Передатчик включает в себя антенну и один или более датчиков для генерирования одного или более сигналов датчиков. Процессор выполнен с возможностью генерирования потока многобитовых символов на основании сигналов датчиков. Компоновка антенных возбудителей выполнена с возможностью электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов, по меньшей мере, для наземного извлечения сигналов датчиков.
В еще одном аспекте изобретения, описаны портативное устройство и соответствующий способ для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в области. Портативное устройство включает в себя приемник, выполненный с возможностью приема сигнала передатчика в качестве потока многобитовых символов, который, по меньшей мере, характеризует набор информации датчика, относящейся к работе передатчика в ходе подземных работ для извлечения набора информации датчика.
В следующем аспекте изобретения, описаны портативное устройство и соответствующий способ для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в области. Портативное устройство включает в себя приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от передатчика для формирования потока многобитовых символов на основании набора частот символа, причем каждый из многобитовых символов соответствует одной из частот символа, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, и (ii) принимать поток многобитовых символов от передатчика в ходе подземных работ для извлечения информации датчика.
В дополнительном аспекте изобретения, описаны портативное устройство и соответствующий способ для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в области. Портативное устройство включает в себя приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от передатчика, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, (ii) принимать частоты символа от передатчика в ходе подземных работ для извлечения информации датчика и (iii) выделять передаваемую мощность каждой из частот символа.
В другом аспекте изобретения, описаны портативное устройство и соответствующий способ для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в области. Портативное устройство включает в себя приемник, выполненный с возможностью приема от передатчика структуры пакета, которая образована множеством многобитовых символов в потоке символов, включающем в себя, по меньшей мере, одну группу многобитовых символов, характеризующих информацию датчика как пакетные данные, и, по меньшей мере, еще одну группу многобитовых символов, выступающую в роли блока данных исправления ошибок, причем пакетные данные характеризуют набор информации датчика, относящейся к работе передатчика в ходе подземных работ. Блок расслоения выполнен с возможностью приема каждого многобитового символа как множества срезов символа, которые разнесены по времени, и при этом каждый срез символа включает в себя набор величин частоты символа, включающий в себя величину для каждой частоты символа. Буфер спектрограммы включает в себя длину, образованную последовательностью позиций срезов, причем в каждой из позиций срезов может храниться хранения один набор величин частоты символа, и длины буфера спектрограммы достаточно для хранения суммарного количества срезов символа, соответствующего продолжительности времени структуры пакета. Переключатель временных срезов выполнен с возможностью маршрутизации срезов символа в позиции срезов буфера спектрограммы для последовательного и выборочного сохранения набора величин частоты символа, связанных с каждым последовательным срезом символа. Декодер выполнен с возможностью обнаружения, в порядке извлечения пакетных данных, начального символа структуры пакета в буфере спектрограммы на основании блока данных исправления ошибок.
В еще одном аспекте изобретения, описаны система и соответствующий способ для использования с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Система включает в себя передатчик, поддерживаемый подземным оборудованием, включающий в себя антенну, один или более датчиков для генерирования одного или более сигналов датчиков, процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков, и антенный возбудитель для электрического возбуждения антенны для излучения потока электромагнитных символов на основании потока многобитовых символов. Система дополнительно включает в себя портативное устройство, включающее в себя приемник, выполненный с возможностью приема потока многобитовых символов в нормальном режиме в ходе подземных работ для извлечения набора информации датчика в условиях электромагнитного шума.
В еще одном аспекте изобретения, описаны передатчик и соответствующий способ для использования с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Передатчик включает в себя антенну и один или более датчиков для генерирования одного или более сигналов датчиков. Модулятор выполнен с возможностью генерирования, по меньшей мере, одной модулированной частоты данных на несущей частоте на основании сигналов датчиков. Генератор тонов глубины выполнен с возможностью создания частоты немодулированного тона глубины, которая в двадцать или более раз меньше несущей частоты, и антенный возбудитель для электрического возбуждения, по меньшей мере, одной антенны для излучения частоты тона глубины и несущей частоты для наземной регистрации частоты тона глубины и для извлечения сигналов датчиков из модулированных частот данных.
В дополнительном аспекте изобретения, описаны портативное устройство и соответствующий способ для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, и подземное оборудование поддерживает передатчик, который передает электромагнитный сигнал, регистрируемый портативным устройством, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Портативное устройство включает в себя приемник для регистрации сигнала, когда передатчик находится над землей в первом рабочем режиме, и под поверхностью земли во втором рабочем режиме, и процессор, выполненный с возможностью работы по выбору в (i) первом режиме для определения наземного расстояния от портативного устройства до передатчика на основании измеренной на земле интенсивности сигнала электромагнитного сигнала и компенсации поверхностного эффекта, и (ii) во втором режиме, когда передатчик находится под землей, для определения глубины передатчика под поверхностью на основании измеренной под землей интенсивности сигнала электромагнитного сигнала.
В еще одном аспекте изобретения, описаны система и соответствующий способ для использования в горизонтальном направленном бурении, причем система включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ. Система включает в себя передатчик, который включает в себя один или более датчиков для измерения одного или более рабочих параметров, характеризующих состояние подземного оборудования, причем передатчик передает на двух или более частотах, причем, по меньшей мере, одна из таких частот сама представляет множественные биты данных, характеризующие состояние подземного оборудования независимо от какой-либо модуляции частот. Портативное устройство, как другая часть системы, включает в себя приемник, выполненный с возможностью приема двух или более частот, и процессор, выполненный с возможностью извлечения состояния подземного оборудования из двух или более частот. Описаны также соответствующие портативное устройство, передатчик и способы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Иллюстративные варианты осуществления представлены в чертежах. Предполагается, что раскрытые здесь варианты осуществления и чертежи являются иллюстративными, а не ограничительными.
Фиг. 1 - схематический вид варианта осуществления системы для осуществления подземных работ в соответствии с настоящим изобретением с использованием усовершенствованных протоколов и способов связи.
Фиг. 2 - схематический вид в перспективе с частичным вскрытием внутренней части устройства, который демонстрирует вариант осуществления передатчика, отвечающего настоящему изобретению.
Фиг. 3 - блок-схема, демонстрирующая дополнительные детали передатчика в отношении варианта осуществления, показанного на фиг. 2.
Фиг. 4 - блок-схема, демонстрирующая детали варианта осуществления синтезатора частот, который образует часть варианта осуществления передатчика показанного на фиг. 2 и 3.
Фиг. 5a - схематическое представление варианта осуществления полос и подполос частот, на основании которых могут быть сконфигурированы различные варианты осуществления передатчика согласно настоящему изобретению.
Фиг. 5b - схематическое представление варианта осуществления набора поисковых таблиц, которые можно использовать для поисковых таблиц частот глубины и символа, показанных на фиг. 4.
фиг. 5c-5j - схематические представления вариантов осуществления поисковых таблиц в наборе поисковых таблиц, показанном на фиг. 5b, показанных здесь для иллюстрации дополнительных деталей в отношении каждой поисковой таблицы.
Фиг. 6a - график спектральной плотности мощности шума, полученный при высоком разрешении, соответствующий фактическому физическому местоположению, в котором используется частота электропитания 50 Гц.
Фиг. 6b - схематическая иллюстрация одного варианта осуществления снимка экрана, где показан дисплей 36, включающий в себя отображение гистограммы, иллюстрирующее средний шум в расчете на подполосу частот для варианта осуществления подполос, первоначально показанного на фиг. 5a.
Фиг. 7 - дополнительно увеличенный вид подполосы 10 из фиг. 6a, показанный здесь для облегчения рассмотрения секции частоты глубины и частот символа и включающий в себя вставной вид, который демонстрирует вариант осуществления спектрального состава символов, передаваемых в соответствии с настоящим изобретением.
Фиг. 8 - блок-схема операций, которая демонстрирует вариант осуществления работы передатчика согласно настоящему изобретению.
Фиг. 9 - блок-схема, демонстрирующая вариант осуществления портативного устройства, показанного на фиг. 1.
Фиг. 10a - расширенный вид подполосы частот 6 из фиг. 6a.
Фиг. 10b - схематическая иллюстрация одного варианта осуществления снимка экрана, демонстрирующего внешний вид подполосы 6 на экране дисплея, позволяющей оператору выбирать и изменять частоты символа, а также осуществлять другие функции в соответствии с настоящим изобретением.
Фиг. 11 - дополнительно увеличенный вид участка подполосы 6, показанной на фиг. 10a и 10b, изображенный здесь в целях описания дополнительных деталей в отношении выбора частоты символа.
Фиг. 12 - блок-схема операций, демонстрирующая вариант осуществления способа эксплуатации портативного устройства в соответствии с настоящим изобретением в целях спектрального сканирования и назначения частот символа.
Фиг. 13 - блок-схема операций, демонстрирующая вариант осуществления способа эксплуатации портативного устройства в соответствии с настоящим изобретением в нормальном режиме в ходе подземных работ.
Фиг. 14 - блок-схема, демонстрирующая вариант осуществления детектора глубины для определения глубины передатчика на основании приема частот символа в соответствии с настоящим изобретением.
Фиг. 15 - блок-схема, демонстрирующая другой вариант осуществления детектора глубины для определения глубины передатчика на основании приема частот символа в соответствии с настоящим изобретением.
Фиг. 16 - блок-схема, демонстрирующая еще один вариант осуществления детектора глубины для определения глубины передатчика путем использования кода исправления ошибок для коррекции амплитуд, связанных с принятыми символами.
Фиг. 17 - блок-схема операций, демонстрирующая вариант осуществления способа определения глубины на основании приема частот символа, в соответствии с настоящим изобретением.
Фиг. 18 - схематическая иллюстрация варианта осуществления антенны для использования в портативном устройстве, показанном на фиг. 1.
Фиг. 19 - схематическая иллюстрация потока символов, включающего в себя реализацию молчащего синхро, в соответствии с настоящим изобретением.
Фиг. 20 - схематический график передаваемой формы волны данных, показанный здесь для иллюстрации дополнительных деталей в отношении молчащего синхро, в соответствии с настоящим изобретением.
Фиг. 21 - дополнительно увеличенный схематический график участка принятого сигнала на основании передаваемого потока данных, изображенного на фиг. 20, показанного здесь подверженным шуму.
Фиг. 22 - схематический график, иллюстрирующий форму волны, полученную возведением в квадрат формы волны, изображенной на фиг. 21, которая позволяет легко идентифицировать пустой символ.
Фиг. 23 - блок-схема операций, демонстрирующая вариант осуществления способа эксплуатации системы настоящей заявки с использованием молчащего синхро.
Фиг. 24 - график, схематично демонстрирующий зависимость ошибки поверхностного эффекта от расстояния в соответствии с настоящим изобретением.
Фиг. 25 - схематическая иллюстрация варианта осуществления внешнего вида экрана дисплея портативного устройства, действующего в режиме проверки наземного расстояния в соответствии с настоящим изобретением.
Фиг. 26 - схематическая иллюстрация варианта осуществления внешнего вида экрана дисплея портативного устройства, действующего в нормальном режиме в соответствии с настоящим изобретением.
Фиг. 27 - блок-схема операций, демонстрирующая вариант осуществления способа эксплуатации портативного устройства в двухрежимной конфигурации, включающей в себя режим проверки наземного расстояния и нормальный режим в соответствии с настоящим изобретением.
Фиг. 28 - блок-схема, демонстрирующая вариант осуществления секции приемника, составляющей часть портативного устройства, которая принимает поток многобитовых символов в виде временных срезов для переноса в буфер спектрограммы и которая исключает из буфера спектрограммы временные срезы, в отношении которых определено, что они превышают порог шума, в соответствии с настоящим изобретением.
Фиг. 29 - блок-схема операций, демонстрирующая вариант осуществления способа загрузки временных срезов спектрограммы в буфер спектрограммы и последующего декодирования временных срезов для извлечения пакетных данных в соответствии с настоящим изобретением.
Фиг. 30 - схематическая иллюстрация, демонстрирующая содержимое буфера спектрограммы и детали, относящиеся к декодированию содержимого, в соответствии с настоящим изобретением.
Фиг. 31 - блок-схема операций, демонстрирующая вариант осуществления процесса декодирования для извлечения пакетных данных из буфера спектрограммы, показанного фиг. 30, в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
Нижеследующее описание представлено для того, чтобы специалист в данной области техники мог использовать изобретение, и приведено в контексте патентной заявки и ее требований. Специалисты в данной области техники могут легко предложить различные модификации описанных вариантов осуществления, и изложенные здесь общие принципы могут применяться к другим вариантам осуществления. Таким образом, настоящее изобретение не подлежит ограничению показанным вариантом осуществления, но подлежит рассмотрению в широчайшем объеме, согласующемся с описанными здесь принципами и признаками, включающими в себя модификации и эквиваленты. Заметим, что чертежи выполнены без учета масштаба и носят схематический характер, чтобы наилучшим образом иллюстрировать признаки, представляющие интерес. Описательная терминология может применяться в целях улучшения понимания читателем различных видов, обеспеченных в чертежах, и никоим образом не предназначена в качестве ограничения.
Под битом, в целях настоящей заявки, понимается двоичное значение данных, имеющее два состояния, характеризуемые, например, 1/0, +/- и пр. Под символом, в целях настоящего изобретения, понимается значение данных, которое представляет один или более битов. Многобитовый символ представляет два или более битов. Символ может характеризовать любой подходящий тип информации, например, данные тангажа, данные крена, данные температуры, данные батареи и данные синхронизации, без ограничения. Разные многобитовые символы представляют разные многобитовые значения данных. Например, 16 разных символов могут представлять четырехбитовое значение данных. Каждый многобитовый символ, в целях настоящего изобретения, представлен отдельной частотой, которая отличается от частоты, которая связана с любым другим многобитовым символом. Поток символов образован последовательной передачей многобитовых символов, благодаря чему поток символов можно декодировать в соответствующий цифровой поток данных, который может быть двоичным. Поток символов может передаваться с учетом структуры пакета, благодаря чему конкретная позиция данного символа в структуре пакета задает тип данных, который связан с этим символом.
Обратимся к чертежам, в которых аналогичные элементы могут указываться аналогичными ссылочными позициями в различных чертежах, и непосредственно к фиг. 1, где показан один вариант осуществления системы для осуществления подземных работ, в целом, указанной ссылочной позицией 10. Система включает в себя портативное устройство 20, которое, как показано, оператор держит над поверхностью 22 земли, а также в дополнительно увеличенном вставном виде. Заметим, что в устройстве 20 показана только ограниченная межкомпонентная проводка для обеспечения наглядности иллюстрации, но специалисту в данной области техники понято, что вся необходимая проводка присутствует и может быть легко реализована на основании этого общего раскрытия. Устройство 20 включает в себя трехосную антенную решетку 26, измеряющую три ортогональных компоненты магнитного потока. Один вариант осуществления полезной антенной решетки, которая предполагается для использования здесь, раскрыт в патенте США № 6005532, который имеет того же правообладателя, что и настоящая заявка, и включен в данное описание в порядке ссылки. Детали в отношении варианта осуществления используемой здесь антенны будут обеспечены в надлежащий момент в дальнейшем. Антенная решетка 26 электрически подключена к электронной секции 32. Компоновка 34 датчика наклона может быть обеспечена для измерения гравитационных углов, из которых можно определять компоненты потока на уровне системы координат. Надлежащий датчик наклона включает в себя, в порядке неограничительного примера, трехосный акселерометр.
Устройство 20 может дополнительно включать в себя графический дисплей 36 и телеметрическая антенна 40. Последняя может передавать или принимать телеметрический сигнал 44 для обмена данными с буровым станком. Очевидно, что графический дисплей 36 может представлять собой сенсорный экран, облегчающий оператору выбор различных кнопок, которые заданы на экране, и/или облегчающий прокрутку между различными кнопками, которые заданы на экране, для обеспечения выбора оператора. Такой сенсорный экран можно использовать отделено или совместно с устройством 48 ввода, например, кнопкой триггера. Последнюю можно использовать без необходимости в сенсорном экране. Кроме того, можно применять многие разновидности устройства ввода, и можно использовать колесики прокрутки и другие подходящие формы устройства выбора, доступные в настоящее время или находящиеся в разработке. Электронная секция может включать в себя такие компоненты, как, например, один или более процессоров, память любого надлежащего типа, антенные возбудители и аналого-цифровые преобразователи. Как хорошо известно в уровне техники, последние должны иметь возможность регистрировать частоту, по меньшей мере, вдвое большую самой высокой частоты, представляющая интерес. При желании, можно добавлять другие компоненты, например, магнитометр 50 для помощи в определении позиции относительно направления бурения и ультразвуковые преобразователи для измерения высоты устройства над поверхностью земли.
Опять же, согласно фиг. 1, система 10 дополнительно включает в себя буровой станок 80, имеющий каретку 82, принятую для перемещения вдоль пара противоположных рельсов 84. Подземное оборудование 90 присоединено на противоположном конце бурильной колонны 92. В порядке неограничительного примера, бурильный инструмент показан как подземное оборудование и используется как основа для настоящих описаний, однако следует понимать, что можно использовать любое подходящее подземное устройство, например, оборудование расширения для использования в ходе операции подъема из скважины или картографическое оборудование. В целом, бурильная колонна 92 образована множеством съемно-присоединяемых секций бурильной трубы, что позволяет буровому станку продвигать бурильную колонну в землю с использованием перемещение в направлении стрелки 94 и отводить бурильную колонну в соответствии с противоположным перемещением. Секции бурильной трубы могут образовывать сквозной проход в целях транспортировки бурового раствора или флюида, который исходит из бурильного инструмента под давлением, для помощи в прорубании сквозь толщу земли, а также охлаждении бурового наконечника. В целом, буровой раствор также служит для взвешивания и выноса шлама на поверхность вдоль внешней длины бурильной колонны. Управление ориентацией можно осуществлять общеизвестным способом путем ориентирования асимметричной грани 96 бурильного инструмента для отклонения в нужном направлении в земле в соответствии с прямым, толкательным перемещением, которое может именоваться ʺтолкательным режимомʺ. Вращение или кручение 98 бурильной колонны буровым станком, в общем случае, приводит к прямому или прямолинейному продвижению бурильного инструмента, которое может именоваться режимом ʺвращенияʺ или ʺпродвиженияʺ.
Оператор может управлять буровыми работами (не показано) на пульте 100 управления, который включает в себя телеметрический приемопередатчик 102, соединенный с телеметрической антенной 104, экран 106 дисплея, устройство ввода, например, клавиатуру 110, компоновку 112 обработки, которая может включать в себя подходящие интерфейсы и память, а также один или более процессоров. Несколько рычагов 114 управления, например, управляет перемещением каретки 82. Телеметрический приемопередатчик 104 может передавать или принимать телеметрический сигнал 116 для облегчения двусторонней связи с портативным устройством 20. Согласно варианту осуществления, экран 106 может представлять собой сенсорный экран, что делает клавиатуру 110 необязательной.
Согласно варианту осуществления, устройство 20 выполнено с возможностью приема электромагнитного сигнала 120 глубины и электромагнитного сигнала 122 данных, которые передаются от передатчика 130, который поддерживается в бурильном инструменте или другом подземном оборудовании. Эти сигналы можно совместно именовать здесь сигналами передатчика. Сигналы передатчика могут быть дипольными сигналами. Очевидно, что портативное устройство можно эксплуатировать либо в режиме обхода для определения местоположения, как показано на фиг. 1, либо в режиме самонаведения, когда портативное устройство располагается на земле, например, как показано в опубликованной патентной заявке США № 2013/0175092, которая включена посредством ссылки в полном объеме. Хотя настоящее изобретение демонстрирует диполь, расположенный в поле, передаваемом от бурильного инструмента, и повернутый относительно оси симметрии поля, настоящее изобретение не предполагает ограничения в этом отношении.
Информация, переносимая сигналом данных, может включать в себя, но без ограничения, параметры ориентации позиция на основании показаний датчика ориентации тангажа и крена, значений температуры, значений давления, состояния батареи, показаний натяжения в контексте операции подъема из скважины, и пр. Устройство 20 принимает сигналы передатчика с использованием антенной решетки 26 и обрабатывает принятый сигнал 122 данных для извлечения данных, что будет описано ниже.
На фиг. 2 показан схематический вид в перспективе с частичным вскрытием внутренней части устройства, который демонстрирует вариант осуществления передатчика 130. Последний включает в себя основной корпус 134, который может иметь, по меньшей мере, в целом, цилиндрическую конфигурацию. Отделение 138 для батареи может быть сформировано на одном конце корпуса, тогда как на противоположном конце 140 установлена главная печатная плата (PCB) 144, которая сама может поддерживать антенну 148, которая излучает сигналы передатчика. Модуль 150 акселерометра может располагаться рядом с одним концом PCB 144. Другие датчики и компоненты могут располагаться на главной печатной плате, что будет описано ниже.
Теперь обратимся к блок-схеме, показанной на фиг. 3, совместно с фиг. 2, в целях описания дополнительных деталей в отношении варианта осуществления передатчика 130. Передатчик включает в себя секцию 152 обработки, которая принимает информацию датчика через мультиплексор 154. Мультиплексор может сопрягаться с любым количеством датчиков, образующих комплект датчиков. В настоящем примере, датчики включают в себя акселерометры 158, установленные в модуле 150 акселерометра, показанном на фиг. 2, датчик 160 давления, который можно использовать для регистрации давления в затрубном пространстве в стволе скважины вокруг передатчика, датчик 164 температуры, датчик 168 тока батареи и датчик 170 напряжения батареи. Внешняя связь для передатчика может обеспечиваться, в некоторых вариантах осуществления, внешним коммуникационным соединением 174. Не обязательно, чтобы такая связь осуществлялась сквозь толщу земли, но, вместо этого, она может осуществляться, когда передатчик находится над землей, например, рядом с устройством 20. Внешнюю связь можно реализовать любым подходящим образом, в том числе, но без ограничения, посредством IrDA, NFC, Wi-Fi, Zigbee или Bluetooth. Секция 178 источника питания может содержать батарею 180, которая обеспечивает мощность через детектор 184 перенапряжения и обратной полярности. Последний выдает электрическую мощность на источник 188 питания логики и датчиков и на источник 190 питания антенных возбудителей. Источник питания логики и датчиков выдает мощность на комплект датчиков, а также на секцию 152 обработки. Источник питания антенных возбудителей подает электрическую мощность на антенный возбудитель 194 глубины и антенный возбудитель 198 данных, которые электрически возбуждают противоположные концы антенной катушки, составляющей часть антенны 148. Возбудители 194 и 198, согласно варианту осуществления, могут быть однополупериодными возбудителями. Антенные возбудители принимают входные сигналы от процессора 200, который составляет часть секции обработки. Секция обработки дополнительно включает в себя генератор 210, например, кварцевый генератор. Генератор можно выбирать для обеспечения относительно высокой степени температурной и общей стабильности. Процессор (ЦП) 200 включает в себя секцию 212 таймера, которая может служить для генерации опорного сигнала, обладающего стабильностью, которая отражает стабильность генератора 210. Выходную частоту таймера можно выбирать на основании значения таймера перезагрузки, которое может указываться пользователем. Процессор обменивается данными с памятью 218, которая может включать в себя любую подходящую информацию, включающую в себя, но без ограничения, информацию 224 частоты глубины и информацию 228 частоты символа, каждая из которых будет описана в надлежащие моменты в дальнейшем.
Согласно фиг. 4, вариант осуществления синтезатора частот, в целом, указан ссылочной позицией 300 и реализован как часть секции 152 обработки, показанной фиг. 3. Очевидно, что синтезатор частот можно реализовать в оборудовании, программном обеспечении или любой подходящей их комбинации. Вариант осуществления, показанный на фиг. 4, представляет собой двухканальный прямой цифровой синтезатор (DDS), имеющий канал 304 глубины и канал 308 символа. Канал глубины выдает выходной сигнал 310 на возбудитель 194 глубины, показанный на фиг. 3, для формирования сигнала 120 глубины, тогда как канал символа выдает выходной сигнал 312 на возбудитель 198 данных, показанный на фиг. 3 для формирования сигнала 122 данных (фиг. 1 и 2). Каждая из секции 320 поисковой таблицы форм волны канала глубины и секции 324 поисковой таблицы форм волны канала символа включает в себя, по меньшей мере, одну поисковую таблицу форм волны или фаз, которая характеризует один период выбранной формы волны, например, синусоиды. В другом варианте осуществления, каждая из секции поисковой таблицы каналов глубины и секции поисковой таблицы каналов символа может включать в себя множество поисковых таблиц форм волны или фаз. В настоящем примере, существует n поисковых таблиц форм волны, схематично показанных и указанных ссылочными позициями 326a-n. Очевидно, что любую нужную форму волны или формы волны можно охарактеризовать с помощью поисковых таблиц. Дополнительно, не требуется, чтобы поисковая(ые) таблица(ы) каналов глубины и поисковая(ые) таблица(ы) каналов символа характеризовали одну(и) и ту(те) же форму(ы) волны. Каждая поисковая таблица 326a-n форм волны может включать в себя большое количество выборок величины характеризуемой формы волны на основании, например, доступного объема памяти и нужного разрешения. Фазовый аккумулятор 330 канала глубины и фазовый аккумулятор 334 канала символа, соответственно, могут выборочно обращаться к выборкам с использованием компоновки адресации шириной m. Каждый фазовый аккумулятор выполнен с возможностью обеспечения выходного счетчика для соответствующей секции поисковой таблицы форм волны на основании размера входного приращения или смещения, который обеспечивается регулятором 338 частоты канала глубины и регулятором 340 частоты канала символа, соответственно. В настоящем варианте осуществления, конкретная одна из поисковых таблиц 326a-n форм волны, подлежащих использованию в любой данный момент времени для каждого из канала глубины и канала символа, основана на генерируемой частоте, что будет описано ниже. Каждый фазовый аккумулятор генерирует так называемую квантованную пилообразную выходную форму волны, которая изменяется от одного уровня или счетчика до следующего на соответствующий один из размеров входного приращения. В ответ на каждый входной счетчик соответствующего фазового аккумулятора, используемая в данный момент поисковая таблица каналов глубины и используемая в данный момент поисковая таблица каналов символа последовательно генерируют цифровые выходные величины, которые поступают на генератор 350 широтно-импульсный модулятора (ШИМ) канала глубины и генератор 352 широтно-импульсный модулятора (ШИМ) канала символа, соответственно, на компоновке адресации шириной n. На основании значения величины, принятой каждым генератором ШИМ, широтно-импульсный модулятор генерирует выходную последовательность импульсов, имеющую, по меньшей мере, в общем случае, постоянную выходную величину, но с шириной импульса, которая возрастает пропорционально выходному значению величины из каждой поисковой таблицы. Фильтрация, обусловленная индуктивными свойствами антенны 148, сглаживает форму волны для аппроксимации нужной выходной формы волны, например, синусоидальной формы волны.
Опять же, согласно фиг. 4, каждая из выходной формы волны 360 канала глубины и выходной формы волны 362 канала символа может генерироваться, например, в диапазоне частот приблизительно от 0 Гц до 45 кГц с высокой степенью точности. Очевидно, что можно использовать любой подходящий диапазон частот, и диапазон от 0 до 45 кГц описан в порядке примера и не подлежит рассмотрению в качестве ограничения. В настоящем варианте осуществления, точность может составлять, по меньшей мере, приблизительно +/-0,1 Гц или менее при разрешении, по меньшей мере, приблизительно 5 Гц. Заметим, что указанная точность, в контексте настоящего варианта осуществления, задана для, по меньшей мере, приблизительно 45 кГц, что представляет нижний предел точности в диапазоне частот. По сравнению с традиционными подходами, очевидно, что настоящее изобретение обеспечивает более высокую точность, более высокую согласованность и высокую гибкость в отношении размещения частоты по всей полосе передачи. Выходные частоты 360 и 362 устанавливаются на основании размера входного приращения, поступающего на фазовый аккумулятор 330 канала глубины через регулятор 338 частоты канала глубины и на фазовый аккумулятор 334 канала символа через регулятор 340 частоты канала символа. Регулятор 338 частоты канала глубины принимает входной сигнал 368 частоты глубины, который указывает частоту глубины. Регулятор частоты канала глубины может преобразовывать указанную частоту глубины до размера приращения для фазового аккумулятора 330 канала глубины любым подходящим образом. Согласно варианту осуществления, регулятор частоты канала глубины может включать в себя поисковую таблицу 370 приращений, которая индексирует частоту глубины по размеру приращения. В другом варианте осуществления, для определения размера приращения можно использовать следующую формулу:

где размер фазового аккумулятора выбирается для обеспечения минимального необходимого частотного разрешения, и частота обновления фазового аккумулятора устанавливается таймером 212 (фиг. 3). Аналогично, регулятор частоты канала символа может преобразовывать указанную частоту символа, принятую на входе 374 потока символов данных, до размера приращения для фазового аккумулятора 334 канала символа любым подходящим образом, например, с использованием поисковой таблицы 372 приращений или формулы. Происхождение потока символов данных для входа 374 потока символов данных будет описано в надлежащий момент в дальнейшем. Заметим, что не требуется, чтобы регуляторы частоты каналов глубины и символа использовали одну и ту же поисковую таблицу размеров приращения. Нижеприведенная таблица 1 демонстрирует участок поисковой таблицы 372 приращений.
Таблица 1
Нужная выходная частота в зависимости от размера приращения фазового аккумулятора
(Гц)
(счетчик)
На основании таблицы 1 очевидно, что высокая степень разрешения обеспечивается в отношении частоты, которую можно выбирать для каждой из выходной частоты 360 глубины и выходной частоты 362 символа. В настоящем варианте осуществления, разрешение 5 Гц может обеспечиваться по всему диапазону частот, проходящему от общепринятых частот электропитания переменного тока до 45 кГц. Конечно, другие варианты осуществления могут использовать аналогичное или другое разрешение до еще более высоких частот. Можно использовать другие разрешения, некоторые из которых больше, и некоторые из которых еще больше, однако заявители понимают, что 5 Гц представляет сравнительно малое общее кратное 50 Гц и 60 Гц, которые являются преобладающими частотами электропитания во всем мире. Дополнительные рассмотрения в отношении частот электропитания будут представлены ниже.
Опять же, согласно фиг. 4, очевидно, что выходная частота 360 глубины и выходная частота 362 символа проиллюстрированы как частотные тоны ограниченной или фиксированной длительности и, по меньшей мере, по существу, фиксированной частоты, которые могут включать в себя переменную величину. Формирование величины/амплитуды можно осуществлять с использованием регулятора 380 формы волны/амплитуды канала глубины для канала глубины, который может именоваться формирователем канала глубины, и регулятора 382 формы волны /амплитуды канала символа, который может именоваться формирователем канала символа. Другой иллюстративный выходной сигнал генератора 350 ШИМ канала глубины представляет собой непрерывный сигнал 386 глубины, который имеет, по меньшей мере, по существу, непрерывную величину. В этом случае, формирователь 380 канала глубины может не требоваться, хотя следует понимать, что его работа отражает работу формирователя канала символа, как описано здесь. Очевидно, что глубину передатчика, на основании сигнала 386 глубины, можно определять на основании общеизвестных уравнений диполя, как описано, например, в патенте США № 5633589, который включен в данное описание в порядке ссылки. Другой иллюстративный выходной сигнал 390 генератора 352 ШИМ канала символа демонстрирует ряд выходных символов, указанных как 392a-392f, которые могут изменяться по частоте от символа к символу. Как будет описано ниже, выходной сигнал 390 может содержать поток символов. В настоящем варианте осуществления, не существует зазора или промежутка нулевой величины, присутствующего или вставленного между соседними символами фазового аккумулятора 334. Таким образом, частота может резко изменяться от символа к символу, что может вносить шум в соответствии с такими резкими переходами частоты. Очевидно, что символам 392a-392f придается форма, начинающаяся и заканчивающаяся значением приблизительно нулевой величины, что позволяет избегать резких переходов частоты. Такое формирование можно осуществлять путем применения формирователем 382 канала символа подходящей взвешивающей или вырезающей функции, например, взвешивающей функции Хэмминга, взвешивающей функции Ханна, взвешивающей функции Уэлча или треугольной взвешивающей функции и пр. Общей чертой всех рассмотренных взвешивающих функций состоит в нулевой величине формы волны для любой точки за пределами интервала вырезания, благодаря чему каждый символ начинается и заканчивается формой волны нулевой величины.
Теперь обратимся к фиг. 5a совместно с фиг. 2. Хотя это не обязательно, варианты осуществления передатчика 130 могут быть выполнены с возможностью передачи сигнала 120 глубины и сигнала 122 данных с использованием ряда полос передатчика, в целом, указанных ссылочной позицией 400, которые проходят приблизительно от 0 до 45 кГц. Следует понимать, что другие варианты осуществления могут использовать другие полосы и подполосы передатчика согласно настоящему варианту осуществления в порядке неограничительного примера. Хотя в качестве нижнего предела указано нулевое значение, следует понимать, что фактический нижний предел может быть представлен общепринятыми преобладающими частотами электропитания или некоторым более высоким значением. Полосы передатчика указаны как BT1-BT5 и также приведены в таблице 2. Хотя в основе описания с применением таблицы 2 лежат полосы передатчика, которые включают в себя подполосы частот, ниже будет показано, что принцип полос передатчика, в общем случае, не применим к вариантам осуществления широкополосного передатчика, но все же описан, несмотря на то что термин "подполоса" считается применимой к широкополосному передатчику в смысле задания некоторого ограниченного участка всей полосы, в которой широкополосный передатчик способен передавать.
Таблица 2
Полосы и подполосы передатчика
Опять же, согласно фиг. 5a, диапазон частот от 0 до 45 кГц, в соответствии с настоящим вариантом осуществления, дополнительно делится на 10 подполос SB1-SB10, каждая из которых имеет ширину 4,5 кГц. Каждую полосу выше BT1 и подполосы 1 можно рассматривать как включающую в себя свой нижний предел частоты. Очевидно, что любой отдельный передатчик может быть выполнен с возможностью передачи в одной из полос BT1-BT5 передатчика. Использование полос передатчика, хотя и не обязательно, позволяет согласовывать антенну 148 (фиг. 2) с полосой передатчика таким образом, чтобы эффективность передачи была, по меньшей мере, близка к оптимальной. Хотя полосы BT1 и BT2 передатчика включают в себя по одной подполосе, заметим, что полоса BT3 передатчика включает в себя две подполосы, SB3 и SB4, и полосы BT4 и BT5 передатчика включают в себя по три подполосы: SB5-SB7 и SB8-SB10, соответственно. Вариант осуществления передатчика согласно настоящему изобретению может быть выполнен с возможностью передачи сигнала 120 глубины и сигнала 122 данных в одной подполосе. В другом варианте осуществления, передатчик может быть выполнен с возможностью передачи сигнала 120 глубины в подполосе, которая отличается от подполосы, используемой для сигнала 122 данных. В связи с этим, очевидно, что использование отдельного канала синтезатора (фиг. 4) для канала глубины обеспечивает высокую степень гибкости в отношении частоты сигнала глубины относительно сигнала данных. В еще одном варианте осуществления, передатчик может быть выполнен с возможностью передачи на множественных подполосах. Например, передатчик, выполненный с возможностью передачи на полосе BT3 передатчика, может передавать на обеих SB3 и SB4. В порядке другого примера, широкополосный передатчик, как дополнительно описано ниже, может передавать на двух или более подполосах, например, SB4 и SB10 таким образом, что подполосы могут даже быть отделены друг от друга другими подполосами. В отношении вышеупомянутого широкополосного передатчика, который описан сразу далее, очевидно, что принцип полос передатчика можно рассматривать как неприменимый, поскольку одну антенну можно использовать для всей полосы передатчика.
В некоторых вариантах осуществления, передатчик 300 может быть выполнен с возможностью кооперироваться с антенной 148 таким образом, чтобы передатчик 130 передавал в широком(й) диапазоне или полосе частот, проходящем(й) от самой низкой частоты до приблизительно 45 кГц или выше. Таким образом, один широкополосный передатчик может покрывать эту широкую полосу частот с использованием одной антенны, поддерживая при этом подходящую эффективность в отношении энергопотребления во всем широком диапазоне частот. Очевидно, что в отсутствие оборудования, описанного сразу далее для, по меньшей мере, части широкого диапазона частот, несогласованность между антенной и входной частотой может приводить к неприемлемому расходованию батареи для достижения такой же выходной мощности RF.
Возвращаясь к фиг. 4, для передачи во всем диапазоне частот от самой низкой частоты до приблизительно 45 кГц, в порядке неограничительного примера, варианты осуществления секции 320 поисковой таблицы каналов глубины и секции 324 поисковой таблицы каналов символа могут быть выполнены с возможностью включать в себя наборы поисковых таблиц 326a-n. В каждом наборе можно использовать любое подходящее количество, n, поисковых таблиц. Фазовый аккумулятор 330 канала глубины и фазовый аккумулятор 334 канала символа могут быть выполнены с возможностью использовать надлежащие поисковую таблицу каналов глубины и поисковую таблицу каналов символа, соответственно, на основании генерируемой частоты. Как будет более подробно описано в надлежащий момент в дальнейшем, каждая отдельная поисковая таблица из этих наборов поисковых таблиц может предназначаться для возбуждения антенны 148 таким образом, чтобы поддерживать мощность при, по меньшей мере, в общем случае, постоянном энергопотреблении на участке всей широкой полосы передачи таким образом, чтобы комбинация поисковых таблиц поддерживала нужный уровень энергопотребления по всей широкой полосе передачи. Каждая поисковая таблица может быть выполнена с возможностью возбуждения антенны не только на основании обеспечения конкретной формы волны, но и с использованием выбранной величины формы волны возбуждения. Соответственно, мощностью передачи и энергопотреблением передатчика можно управлять или их можно регулировать, по меньшей мере, частично, на основании величины формы волны поисковой таблицы. Хотя некоторые из поисковых таблиц в наборе могут обеспечиваться в целях ограничения и/или регулировки энергопотребления, одна или более поисковых таблиц может обеспечиваться в целях реализации режима высокой выходной мощности. В таком случае, поисковая таблица высокой выходной мощности может демонстрировать такую же форму дискретизированной формы волны, как соответствующая поисковая таблица более низкой мощности, но поисковая таблица высокой мощности включает в себя версию увеличенной величины дискретизированной формы волны. Антенну, в представленных здесь вариантах осуществления, не требуется возбуждать на резонансной частоте. В связи с этим, резонансная частота, представленная индуктивностью антенны 148, совместно с любыми паразитными емкостями, в общем случае, гораздо выше самой высокой частоты диапазона передачи, например, 45 кГц. Например, резонансная частота может находиться в мегагерцевом диапазоне. В связи с этим антенна может демонстрировать в диапазоне частот передачи импеданс, который можно рассматривать как постоянный, по меньшей мере, с практической точки зрения. Таким образом, антенна 148 может включать в себя количество обмоток, выбранное, по меньшей мере, частично, на основании выбранной или намеченной величины тока, отбираемого из батареи 180.
Фиг. 5b демонстрирует вариант осуществления набора поисковых таблиц, в целом, указанного ссылочной позицией 450, которые можно использовать для поисковых таблиц 326a-n частот глубины и символа. В этом случае набор содержит 8 поисковых таблиц. Следует отметить, что не требуется использовать один и тот же набор поисковых таблиц для передачи глубины и данных. В этом варианте осуществления, набор поисковых таблиц охватывает SB3 - SB10, соответствующие широкополосному диапазону частот от 9 кГц до 45 кГц. Хотя широкий диапазон частот характеризуется в отношении подполос в целях связности описания, очевидно, что нет необходимости в ограничении частоты на основании ранее описанных полос и/или подполос передатчика (см., например, таблицу 2) в контексте широкополосного передатчика. Фиг. 5b демонстрирует общие формы 460, 462, 464, 466, 468, 470, 472 и 474 форм волны поисковой таблицы которые используются для каждой подполосы SB3-SB10, соответственно. Для SB3-SB6 используется синусоидальная дискретизированная форма волны. Для SB7-SB10 используется ступенчатая дискретизированная форма волны. Дополнительные детали будут обеспечены сразу далее.
Фиг. 5c-5j, иллюстрируют дополнительно увеличенные графики дискретизированных форм волны 460, 462, 464, 466, 468, 470, 472 и 474 поисковой таблицы, соответственно, для настоящего варианта осуществления набора поисковых таблиц в целях передачи глубины и данных. По горизонтальной оси каждой из этих фигур отложен период или временной слот дискретизированной формы волны, и по вертикальной оси отложена глубина широтно-импульсной модуляции. Заметим, что фактическая длительность периода дискретизированной формы волны ограничена 0-15 на оси временных слотов, показанной на каждой из этих фигур. На фиг. 5c, форма волны 460 включает в себя синусоидальную форму, имеющую глубину ШИМ в пределах приблизительно от 15% ШИМ до 85% ШИМ. На фиг. 5d, форма волны 462 включает в себя синусоидальную форму, имеющую глубину ШИМ в пределах приблизительно от 10% ШИМ до 90% ШИМ. На фиг. 5e, форма волны 464 включает в себя синусоидальную форму, имеющую глубину ШИМ в пределах приблизительно от 5% ШИМ до 95% ШИМ. На фиг. 5f, форма волны 466 включает в себя синусоидальную форму, имеющую глубину ШИМ в пределах приблизительно от 0% ШИМ до 100% ШИМ. Таким образом, величина дискретизированной формы волны постепенно возрастает приблизительно на 10% при переходе к каждой следующей фигуре, пока на форме волны 466 не будет достигнута 100% модуляция ШИМ. Однако, начиная с дискретизированной формы волны 468 для SB7 на фиг. 5g, дискретизированная форма волны значительно изменяется. В частности, используется ступенчатая дискретизированная форма волны, в которой форма волны переходит от 100% ШИМ до 0% ШИМ. Для формы волны 468, коэффициент заполнения формы волны приблизительно равен 20%. Таким образом, использование дискретизированной формы волны 468 позволяет генерировать последовательность импульсов в качестве сигнала возбуждения антенны с коэффициентом заполнения приблизительно 20%. Согласно фиг. 5h, для формы волны 470, которая соответствует SB8, коэффициент заполнения формы волны приблизительно равен 27%. Таким образом, использование дискретизированной формы волны 470 позволяет генерировать последовательность импульсов в качестве сигнала возбуждения антенны с коэффициентом заполнения приблизительно 27%. Согласно фиг. 5i, для формы волны 472, которая соответствует SB9, коэффициент заполнения формы волны приблизительно равен 33%. Таким образом, использование дискретизированной формы волны 470 позволяет генерировать последовательность импульсов в качестве сигнала возбуждения антенны с коэффициентом заполнения приблизительно 33%. Согласно фиг. 5j, для формы волны 474, которая соответствует SB10, коэффициент заполнения формы волны приблизительно равен 50%, что соответствует прямоугольной волне. Таким образом, использование дискретизированной формы волны 470 позволяет генерировать последовательность импульсов в качестве сигнала возбуждения антенны с коэффициентом заполнения приблизительно 50%.
Из рассмотрения фиг. 5c-5j совместно с набором поисковых таблиц следует, что этот вариант осуществления разработан в целях управления мощностью таким образом, чтобы передатчик отбирал или потреблял приблизительно одинаковую величину мощности независимо от конкретной частоты передачи в широкой полосе. В связи с этим, при постоянном напряжении возбуждения и неизменной форме волны, передатчик в противном случае отбирал бы все большую мощность по мере снижения частоты. Соответственно, в нижеследующих описаниях будет рассмотрен набор поисковых таблиц, начинающийся с верхнего конца полосы передатчика.
Форма волны 474 поисковой таблицы, показанная на фиг. 5j для SB10, от 40,5 кГц до 45 кГц, возбуждает антенну с использованием прямоугольной волны на основном тоне частоты, которая подлежит передаче. Если делать это для более высоких частот, амплитуда основного тона, в качестве первой гармонической компоненты прямоугольной волны, выше примерно на 2 дБ, чем амплитуда чисто синусоидальной волны соответствующей мощности. При снижении частоты передачи от SB9 до SB8, фиг. 5i и 5h демонстрируют, что коэффициент заполнения форм волны 472 и 470 постепенно уменьшается. Соответственно, по мере снижения частоты передачи, форма волны возбуждения становится более импульсовидной с постепенным уменьшением величины энергии на основной частоте последовательности импульсов. Благодаря постепенному сужению импульсов в последовательности импульсов, мощность, отбираемая передатчиком, компенсируется и не испытывает значительного роста при снижении частоты передачи. Этот подход сигнала возбуждения в виде последовательности импульсов применяется, пока сигнал возбуждения в виде синусоидальной волны, по меньшей мере, приблизительно полной величины не согласуется с доступной передаваемой мощностью из сигнала возбуждения в виде последовательности импульсов. Такое условие выполняется на SB6, которая использует формы волны 466 поисковой таблицы в виде синусоидальной волны. Когда частота передачи дополнительно снижается в поисковых таблицах SB5 и SB4, величина формы волны возбуждения в виде синусоидальной волны дополнительно снижается для компенсации тенденции к увеличению передаваемой мощности в соответствии со снижением частоты передачи. Подход поисковых таблиц, разработанный заявителями, который предполагается ранее неизвестным, предусматривает изменение частоты возбуждения в широкополосном диапазоне передачи с использованием одной антенны и без необходимости в использовании разных антенн, что потребовало бы использования многокатушечных антенн, сложной коммутации антенных катушек и/или сложных компоновок переменного напряжения возбуждения.
На основании вышеизложенного, настоящее изобретение может обеспечивать широкополосный передатчик, имеющий одну антенну, которая возбуждается в широкой полосе частот, что позволяет поддерживать постоянное или управляемое энергопотребление, по меньшей мере, приблизительно, тогда как в противном случае энергопотребление будет демонстрировать большие изменения в той же полосе частот при использовании одной формы волны сигнала возбуждения. Изменение энергопотребления в широкой полосе частот может ограничиваться допустимо низкими уровнями в диапазоне от 9 кГц до 45 кГц. Таким образом, заявители способны обеспечить широкополосный передатчик, который работает в широком диапазоне частот с регулировкой энергопотребления и управлением им, которые предполагаются ранее неизвестными. В прошлом, осуществление подземных работ на разных частотах для глубины и данных определения местоположения часто требовало приобретения передатчика, предназначенного для каждой частоты, представляющей интерес. Приведенные здесь соображения позволяют значительно сократить затраты, поскольку один широкополосный передатчик может заменить несколько традиционных передатчиков. В связи с этим, изложенные здесь принципы в равной степени применимы в отношении передатчика, который передает частоту или тон глубины на одной дискретной частоте и передает сигнал данных на другой частоте, которая модулируется любым подходящим образом, например, с использованием BPSK, QPSK или манчестерского кодирования.
Согласно фиг. 4 и согласно варианту осуществления, канал символа можно устанавливать для вывода единственной несущей частоты, очень похожей на сигнал 386 глубины канала глубины, и эта несущая частота может модулироваться любым подходящим образом, например, для переноса данных датчика, по меньшей мере, частично, на основании набора поисковых таблиц 326. Очевидно, что существуют преимущества, связанные с передачей частоты или тона глубины на относительно низкой частоте, например 1,5 кГц, и передачей модулированной частоты данных на значительно более высокой частоте, например, в диапазоне от 30 кГц до 45 кГц. Таким образом, коэффициент 20 или более может обеспечиваться между модулированной несущей частотой и тоном глубины в результате значительных возможностей генерации частоты передатчика, отвечающего настоящему изобретению. В связи с этим, низкие частоты тонов глубины связаны с избеганием источников пассивной помехи, например ребаром, тогда как более высокие частоты данных связаны с более высокими показателями пропускной способности на основании частоты Найквиста. Настоящее изобретение позволяет передавать тон глубины, отстоящий от модулированной частоты данных на величину, которая предполагается ранее неизвестной, в частности, когда одна антенна используется для передачи обоих. Например, тон глубины могут передаваться на частоте 1,5 кГц или менее, и модулированная частота данных может передаваться в диапазоне от 30 кГц до 45 кГц. В другом варианте осуществления, 10 кГц можно использовать для тона глубины, тогда как 40 кГц можно использовать для модулированной частоты данных.
После вышеприведенного подробного описания передатчиков и соответствующих компонентов согласно настоящему изобретению, перейдем к рассмотрению деталей в отношении передачи сигнала 122 данных. В частности, используется подход M(ичной) фазовой манипуляции, позволяющей осуществлять потоковую передачу множества разных символов с образованием сигнала 122 данных. Согласно варианту осуществления, сигнал данных может служить для передачи потока многобитовых символов. Возможность передачи потока многобитовых символов обеспечивается, по меньшей мере, частично, на основании использования синтезатора 300, показанного на фиг. 4. В частности, поток многобитовых символов данных может обеспечиваться на входе 374 потока символов данных в регулятор 340 частоты канала символа. Таким образом, символы данных, соответствующие самым разнообразным отдельным частотам, могут указываться как часть потока символов данных, причем каждый отдельный символ соответствует отдельной частоте. Согласно варианту осуществления, символы данных потока символов могут соответствовать 16 символам (4-битовым), хотя можно использовать любое подходящее количество символов, на основании нужной пропускной способности. Фиг. 4 демонстрирует выходной сигнал 390 на основе 16 символов, S0-S15, где S0 соответствует самой низкой частоте, и каждый следующий символ с более высоким номером соответствует относительно более высокой частоте, хотя это не требуется, и отображение или назначение символов частотам может осуществляться любым подходящим образом. Таким образом, выходной сигнал 390 соответствует иллюстративному входному потоку символов S2, S12, S2, S15, S0 и S10 на входе 374.
На фиг. 6a показан график спектральной плотности мощности шума, полученный при высоком разрешении, в целом, указанный ссылочной позицией 500, соответствующий фактическому физическому местоположению, в котором используется частота электропитания 50 Гц. На вертикальной оси отложен уровень сигнала, и на горизонтальной оси отложена частота. Диапазон частот от 0 до 45 кГц соответствует диапазону частот, покрытому диапазоном передатчиков, описанных в соответствии с настоящим изобретением, например, со ссылкой на фиг. 5a. Как упомянуто выше, настоящий вариант осуществления, использующий диапазон от 0 до 45 кГц, обеспечен в порядке неограничительного примера. Указаны также подполосы SB1-SB10 передатчика. Начальный выбор наиболее подходящей подполосы может основываться на определении среднего значения шума в расчете на подполосу. На этом основании, любая из подполос SB8-SB10 выглядит представляющей допустимый выбор, тогда как одна из подполос SB1-SB3 выглядит представляющей наихудший выбор.
Хотя спектральная развертка на фиг. 6a демонстрирует спектральную информацию, по существу, в единственном положении, очевидно, что спектральную информацию можно собирать в накопительном режиме. Например, спектральное сканирование может осуществляться, когда оператор проходит по запланированной траектории бурения с устройством 20, в то время как устройство характеризует зашумленная среда. Таким образом, спектральный график, показанный на фиг. 6a, можно рассматривать как представляющий зашумленную среду вдоль всей запланированной траектории бурения, причем последующие выборы частоты основаны на том, что зашумленная среда характеризуется для всей длины запланированной траектории бурения, но все же с использованием методов выбора частоты, которые изложены здесь.
На фиг. 7 показан дополнительно увеличенный вид подполосы 10 из фиг. 6a, в целом, указанный ссылочной позицией 550, и здесь для иллюстрации показан выбор частоты глубины и шестнадцати частот символа S0-S15 в этой подполосе. Каждая выбранная частота обозначена стрелкой. Различные частоты выбраны, например, на основании их соответствия точкам низкого шума на графике шума. На основании выбора частот, например S0-S15, автоматически и/или вручную, заявители утверждают, что система 10 может обеспечивать ранее недоступный уровень помехоустойчивости в отношении осуществления подземных работ, например, горизонтального направленного бурения и соответствующих операций подъема или расширения снизу вверх. Соответствующие соображения и дополнительные детали будут обеспечены в контексте рассмотрения устройства 20, которое принимает сигнал глубины и сигнал данных, и которое также может помогать в идентификации частоты сигнала глубины и частот символа, подлежащих использованию передатчиком.
Теперь обратимся к соображениям в отношении гармоник электропитания, которые часто встречаются в внешней зашумленной среде. Однако очевидно, что выбор частоты на основании стремления избегать гармоник электропитания в данном случае не является обязательным. Таким образом, выбор частоты на основании низких измерений шума, потенциально, совместно с другими статистическими параметрами характеризации шума, может обеспечивать значительные преимущества в отношении обеспечения помехоустойчивости. Тем не менее, заявители понимают, что подробное исследование графиков шума, например, проиллюстрированного на фиг. 6a, по меньшей мере, в целом, позволяет выявить присутствие гармоник электропитания, разнесенных на величину приращения, которая определяется местной частотой электропитания. В случае частоты электропитания 60 Гц, гармоники, по меньшей мере, в целом, разнесены на 60 Гц и могут доходить до значений вплоть до 30 кГц. Аналогично, в случае частоты электропитания 50 Гц, гармоники, по меньшей мере, в целом, разнесены на 50 Гц и могут доходить до значений вплоть до 30 кГц. Поэтому шум гармоник электропитания можно снижать путем выбора частот символа, которые попадают, по меньшей мере, между или посередине между гармониками электропитания. Исходя из предположения стабильности частоты электропитания, для частоты электропитания 50 Гц, можно выбирать частоты символа в последовательности 75 Гц, 125 Гц, 175 Гц, 225 Гц и т.д., тогда как, для частоты электропитания 60 Гц, можно выбирать частоты символа в последовательности 90 Гц, 150 Гц, 210 Гц, 270 Гц и т.д. Возможные частоты рассматриваемого символа можно именовать здесь промежуточными частотами. Как рассмотрено выше, синтезатор 300 может работать с частотным разрешением 5 Гц, что позволяет выбирать в качестве частоты символа любую нужную промежуточную частоту гармоники 50 Гц или 60 Гц. Однако заявители понимают, что нестабильность частоты электропитания, приведет к сдвигу частот гармоник. Этот сдвиг возрастает с увеличением частоты. Например, если основная частота электропитания сдвигается на 0,1 Гц от 50 Гц, 100-я гармоника сдвинется на 10 Гц. Ввиду таких сдвигов гармоник, вопрос выбора частоты будет отдельно рассмотрен в надлежащий момент в дальнейшем.
Возвращаясь к фиг. 7 и согласно варианту осуществления, синтезатор 300 может позволять выбирать частоту при разрешении 5 Гц. В связи с этим, очевидно, что этот уровень разрешения обеспечивает выбор частоты посередине между соседними гармониками электропитания. Для частоты электропитания 50 Гц, полоса между соседними гармониками составляет, по меньшей мере, приблизительно 50 Гц. Для частоты электропитания 60 Гц, полоса между соседними гармониками составляет, по меньшей мере, приблизительно 60 Гц. Благодаря стабильности, с которой символы генерируются совместно с формированием символов, как явствует из фиг. 4, символы, передаваемые с образованием потока символов сигнала 122 данных, могут демонстрировать ограниченное спектральное расширение. Дополнительно, присутствующее спектральное расширение может демонстрировать конкретное соотношение с соседними гармониками электропитания на основании скорости передачи. Например, для обеспечения пропускной способности 50 битов в секунду требуется передавать 12,5 символов в секунду для 4-битовых символов при длительности символа 0,08 с. В порядке другого примера, для обеспечения пропускной способности 60 битов в секунду требуется передавать 15 символов в секунду для 4-битовых символов при длительности символа приблизительно 0,067 с. Исходя из скорости передачи 50 бит в секунду (12,5 символов в секунду), вставной вид 552 на фиг. 7 включает в себя график 553, который демонстрирует спектральный состав символа S13 в герцах относительно ближайших к нему гармоник электропитания. Основная частота S13 равна 43825 Гц, которая располагается посередине между разнесенными на 50 Гц частотами гармоник электропитания 43800 Гц и 43850 Гц. Основной пик 554 присутствует в спектральном графике символа на частоте 43825 Гц, благодаря чему вся спектральная энергия этого пика попадает между соседними гармониками электропитания. Боковые лепестки 556a и 556b также полностью попадают между соседними гармониками электропитания. Заметим, что несколько дополнительных боковых лепестков показаны имеющими энергию, которая выходит за пределы соседних гармоник электропитания на частотах 43800 Гц и 43850 Гц. Заметим, что спектр символа демонстрирует нули 558a и 558b, которые попадают прямо на соседние частоты гармоник электропитания. Таким образом, спектральный состав каждой частоты символа, по существу, не помещает никакой мощности сигнала на соседние гармоники электропитания. Нули располагаются на соседних гармониках электропитания, как показано на фиг. 7, на основании скорости передачи данных потока символов. Как рассмотрено выше, поток 390 символов передается без зазоров между символами. Очевидно, что дополнительные боковые лепестки аналогично будут разделены нулями, которые располагаются непосредственно на частотах гармоник электропитания, например, 43750 Гц и 43900 Гц, которые не были показаны в силу иллюстративных ограничений. В связи с этим, спектры символов включает в себя нуль, расположенный на каждой частоте гармоники электропитания. Заметим, что дополнительный участок спектральной энергии, который связан с каждым символом, может перемещаться между соседними гармониками электропитания. Например, если скорость передачи символов снижается наполовину, дополнительные боковые лепестки, показанные во вставном виде 552 на фиг. 7, будут располагаться между соседними гармониками электропитания на частотах 43800 Гц и 43850 Гц совместно с основным пиком. В то же время нули по-прежнему попадают непосредственно на все гармоники электропитания. Для спектрального графика, показанного на фиг. 7, заметим, что основной и боковые лепестки 556a и 556b содержат приблизительно 94 процент полной энергии, связанной с символом.
В таблице 3 приведены, по меньшей мере, приблизительные значения для каждой из выбранных частот, показанных на фиг. 7. Напомним, что частоты S0-S15 были выбраны из соображений низкого шума, а не стремления избегать гармоник электропитания. В связи с этим, в таблице 3 также указана ближайшая гармоника электропитания в случае частоты электропитания 50 Гц. В ряде случаев, например, в отношении выборов частоты для S1, S4, S7 и S8, оказывается, что эти частоты соответствуют гармоникам электропитания 50 Гц, тогда как, в других случаях, выборы частоты только для сигнала глубины S5 и S13 попадают на частоты между гармониками. В связи с этим, очевидно, что такой сдвиг точек низкого шума в спектре шума может быть обусловлен дрейфом частоты электропитания, как рассмотрено выше.
Таблица 3
Пример выбора частот
На основании вышеизложенного, заявители утверждают, что система 10 может обеспечивать ранее недоступный уровень помехоустойчивости в отношении осуществления подземных работ, например, горизонтального направленного бурения и соответствующих операций подъема или расширения снизу вверх. Соответствующие соображения и дополнительные детали будут обеспечены в контексте рассмотрения устройства 20, которое принимает сигнал глубины и сигнал данных, и которое также может помогать в идентификации частоты сигнала глубины и частот символа, подлежащих использованию передатчиком. Очевидно, что частота сигнала глубины и частота символа не обязаны следовать в порядке, указанном в таблице 3. Таким образом, частота сигнала глубины может располагаться между частотами символа. На основании использования отдельного канала в целях генерации сигнала глубины (фиг. 4), сигнал глубины может располагаться в другой подполосе, чем частоты символа. Дополнительно, частоты символа можно переупорядочивать или повторно располагать любым подходящим образом. В отношении ограничения выбора частоты единственной подполосой, следует понимать, что вариант осуществления широкополосного передатчика может быть выполнен с возможностью действовать наподобие передатчика, работа которого ограничена на основании подполос. Например, выбранные частоты в широкополосном передатчике могут ограничиваться единственной подполосой, хотя широкополосный передатчик способен передавать в широком диапазоне подполос.
На фиг. 8 показана блок-схема операций, которая демонстрирует вариант осуществления работы передатчика, в целом, указанного ссылочной позицией 600, согласно настоящему изобретению. Заметим, что, в целях настоящего рассмотрения, предполагается, что частота глубины, а также частоты, связанные с символами S0-S15, уже выбраны. Эти выборы частоты могут храниться в любом подходящем месте, например, в таблице 224 частот глубины и таблице 228 частот символа, показанных на фиг. 3. Способ начинается с этапа 604 и переходит к этапу 608, где осуществляется поиск приращения частоты глубины, например, из поисковой таблицы 370 (фиг. 4) в порядке работы регулятора 338 частоты канала глубины. Согласно варианту осуществления, который использует единственную поисковую таблицу форм волны канала глубины, например, таблицу 326a на фиг. 4, фазовый аккумулятор 330 канала глубины всегда может обращаться к этой единственной поисковой таблице форм волны. С другой стороны, согласно варианту осуществления, который использует множество поисковых таблиц форм волны глубины, на этапе 608 также можно идентифицировать нужную поисковую таблицу 326a-n форм волны как часть секции 320 таблиц формы волны канала глубины на фиг. 4, таким образом, что фазовый аккумулятор 330 канала глубины обращается к надлежащей форме волны поисковой таблицы каналов глубины на основании частоты. На этапе 610, фазовый аккумулятор 330 канала глубины принимает значение и начинает отсчет на основании приращения частоты глубины, что вынуждает надлежащую поисковую таблицу 326a-n каналов глубины и генератор 350 ШИМ канала глубины начинать непрерывно генерировать частоту 386 канала глубины для излучения сигнала 120 глубины на этой частоте. На этапе 614, ЦП 200 считывает информацию датчика через мультиплексор 154 для сбора данных датчика, подлежащих передаче. На этапе 618, ЦП собирает данные датчика в поток символов, который может вызывать структуру пакета, которая будет описана ниже. Поток символов обеспечивается как входной поток 374 символов данных в регулятор 340 частоты канала символа на фиг. 4. На этапе 620, регулятор частоты канала символа может использовать свою поисковую таблицу 372 для идентификации надлежащей частоты для текущего символа, подлежащего передаче. Согласно варианту осуществления, который использует единственную поисковую таблицу форм волны канала символа, например таблицу 326a на фиг. 4, фазовый аккумулятор 334 канала символа всегда может обращаться к этой единственной поисковой таблице форм волны. С другой стороны, согласно варианту осуществления, который использует множество поисковых таблиц форм волны символа, этап 620 также может идентифицировать нужную поисковую таблицу 326a-n форм волны как часть секции 324 таблиц формы волны канала символа, показанной на фиг. 4, таким образом, что фазовый аккумулятор 334 канала символа обращается к надлежащей форме волны поисковой таблицы каналов символа. Очевидно, что для передачи данного потока символов может требоваться, чтобы на этапе 620 поисковые таблицы 326a-n форм волны данных переключались на посимвольной основе от символа к символу, на основании частоты. На этапе 624 передается текущий символ. На этапе 624 осуществляется проверка наличия другого символа для передачи. Если символ имеется, операция возвращается к этапу 620, в результате чего, процесс повторяется для следующего символа. С другой стороны, если следующий символ еще не готов, операция может возвращаться к этапу 610, на котором продолжается передача сигнала глубины. Затем данные датчика снова считываются на этапе 614, после чего процесс продолжается. Очевидно, что сигнал 122 данных чаще всего передается на, по существу, непрерывной основе одновременно с сигналом 120 глубины.
Подробно описав варианты осуществления передатчика 130, обратимся теперь к фиг. 9 совместно с фиг. 1 в целях описания дополнительных деталей в отношении устройства 20, который можно взаимозаменяемо именовать локатором или приемником. Устройство 20 включает в себя батарею 700, которая питает источник 704 питания, который подает надлежащую электрическую мощность на все компоненты устройства, указанные как V+. Электронная секция 32 включает в себя процессор 710, который сопряжен с памятью 714. Телеметрический секция 720 управляется процессором и подключен к антенне 40 для двусторонней связи посредством сигнала 44. В некоторых вариантах осуществления, телеметрическая линия связи может обеспечивать одностороннюю связь от устройства 20 на буровой станок, и в этом случае приемопередатчик 102 должен включать в себя только функционал приемника. Компоновка 722 внешней связи обеспечивает внешнюю связь с передатчиком с использованием внешнего коммуникационного соединения 174 (фиг. 3) передатчика. Как рассмотрено выше, не обязательно, чтобы такая связь осуществлялась сквозь толщу земли, но, вместо этого, она может осуществляться, когда передатчик находится над землей, например, рядом с устройством 20. Внешнюю связь можно реализовать любым подходящим образом, в том числе, но без ограничения, посредством IrDA, NFC, Wi-Fi, Zigbee или Bluetooth. Широкополосный входной каскад 730 выполнен с возможностью приема сигнала 120 глубины и сигнала 122 данных с использованием антенн X, Y и Z, которые образуют антенную решетку 26 для измерения трех ортогональных компонент рассматриваемых сигналов, а также для осуществления измерений шума вдоль этих осей, что будет описано ниже. Дополнительные детали в отношении варианта осуществления антенной решетки будут обеспечены в надлежащий момент в дальнейшем. Каждая из антенн X, Y и Z сопряжена с малошумящим усилителем (МШУ) 734a, 734b и 734c, соответственно, каждый из которых может быть одинаково настроен. Усиленный выходной сигнал каждого МШУ поступает на соответствующий один из фильтров 738a, 738b и 738c, каждый из которых может быть одинаково настроен, и которые можно именовать совместно в качестве фильтров 738. Каждый фильтр выступает в роли полосового фильтра 740, демонстрирующего низкочастотный срез или угол или высокочастотный срез или угол. Хотя фильтры 738 проиллюстрированы как отдельные функциональные блоки, очевидно, что фильтры можно реализовать любым подходящим образом. В порядке неограничительного примера, каждый фильтр можно реализовать как ряд RC-фильтров высоких частот и низких частот которые распределены по цепи сигнала. Согласно варианту осуществления, каждый из двух фильтров высоких частот может быть установлен на низкую частоту сопряжения около 4 кГц, и четыре фильтра низких частот могут быть установлены на высокую частоту сопряжения около 90 кГц. Этот вариант осуществления обеспечивает относительно плоскую частотную характеристику от 10 кГц до 50 кГц. Срез ниже 10 кГц дает ослабление приблизительно 40 дБ на декаду, и срез выше 50 кГц дает ослабление приблизительно 80 дБ на декаду. Очевидно, что характеристику низкого конца фильтров 738 и низкая частота сопряжения можно устанавливать с учетом основной частоты и гармоники низких порядков электропитания, которые могут быть очень сильными. Усилители 750a-750c могут следовать за каждым соответствующим одним из фильтров 738a-738c с достаточным коэффициентом усиления в целях возбуждения каждого из аналого-цифровых преобразователей АЦП 754a-754c. Каждый АЦП 754 обеспечивает выходной сигнал на ЦП 710. Согласно варианту осуществления, устройство 20 может быть выполнено с возможностью приема потока символов таким образом, чтобы подавлять частоты гармоник электропитания, поскольку в потоке символов на гармониках электропитания, по существу отсутствует энергия. Например, принятый сигнал можно обрабатывать таким образом, чтобы характеристика приемника совпадала со спектрами символов, показанными на графике 553 на фиг. 7. В частности, спектральная характеристика приемника может совпадать со спектральными характеристиками передатчика путем интегрирования принятого потока символов по периоду времени, который соответствует продолжительности времени или периоду каждого символа. Таким образом, частотная характеристика приемника совпадает с характеристикой передатчика в том смысле, что демонстрирует нулевые точки приема на частотах гармоник электропитания. Соответственно, энергия на частотах гармоник подавляется или игнорируется приемником при резком повышении спектральной энергии, связанной с символом. Приемник может применять любой подходящий процесс демодуляции, который обеспечивает периодические нули, в том числе, но без ограничения, дискретное преобразование Фурье (DFT).
Опять же, согласно фиг. 9 и из вышеприведенного подробного описания варианта осуществления локатора 20, очевидно, что локатор может быть выполнен с возможностью осуществления измерения и анализа шума в целях выбора передатчика для передачи сигнала глубины и сигнала данных, а также установления частот, подлежащих связыванию с каждым из этих сигналов. Конечно, выбор полосы может не требоваться при использовании широкополосного передатчика. Измерения шума можно определять на основании каждой ортогональной оси антенны 26 (антенн X, Y и Z, как показано на фиг. 9). Эти отдельные компоненты шума можно использовать для установления трехмерного значения шума, например, на основании векторной суммы трех компонентов антенны. Векторная сумма может быть полезна, поскольку показание шума в данной точке, по существу, не будет инвариантным относительно изменений ориентации локатора. С другой стороны, отображение показания шума, полученного из одной оси, в целом, будет демонстрировать изменение в данной точке, когда изменяется ориентация локатора. Благодаря возможности осуществлять мониторинг шума вдоль одной оси антенны, например оси X, оператор может идентифицировать конкретную ось вдоль траектории бурения, на которой могут возникать проблемы с помехой. Значения шума можно определять любым подходящим образом, например, на основании быстрого преобразования Фурье (FFT). Согласно варианту осуществления развертку шума можно создавать из каждой оси в целях сравнения. Например, ось, которая демонстрирует относительно более высокий шум, чем другие оси, можно обрабатывать иначе в целях извлечения данных.
Как рассмотрено выше в отношении фиг. 6a, начальный выбор наиболее подходящей подполосы может основываться, например, на среднем значении шума в расчете на подполосу. Согласно варианту осуществления, локатор может автоматически рекомендовать использовать подполосу с самым низким средним шумом, например, SB-9. Например, экран 36 дисплея может демонстрировать график, гистограмму или любую подходящую форму формата отображения на основании спектральной развертки, показанной на фиг. 6a, выделяя выбранную подполосу. В некоторых вариантах осуществления, процесс выбора подполосы может опираться на другие статистические значения в целях характеризации шума, как будет описано сразу далее.
Фиг. 6b демонстрирует один вариант осуществления снимка экрана, демонстрирующего дисплей 36, включающий в себя отображение гистограммы, иллюстрирующей средний шум в расчете на подполосу, где подполоса SB-10 выделена, например, с использованием штриховки и/или цвета или каким-либо другим подходящим образом для указания, что SB-10 выбрана автоматически. В другом варианте осуществления, локатор может автоматически давать рекомендации на основании среднего шума в расчете на подполосу совместно с другими статистическими значениями. Можно использовать любое(ые) подходящее(ие) статистическое(ие) значение(я), в том числе, например, среднеквадратическое отклонение, минимальный шум и пиковый шум. В еще одном варианте осуществления, можно рекомендовать более одной подполосы, и в этом случае пользователь может выбирать между рекомендованными подполосами. Рекомендование множественных подполос может основываться на ограниченной величине статистического изменения между подполосами. Например, обе подполосы 9 и 10 можно рекомендовать на основании относительно ограниченной разности между двумя подполосами, как явствует из фиг. 6b. В порядке другого примера, множественные подполосы можно рекомендовать, например, на том основании, что средний шум для первой подполосы ниже, чем средний шум для второй подполосы, тогда как пиковый шум для первой подполосы выше, чем пиковый шум для второй подполосы. Согласно варианту осуществления, в котором рекомендуется более одной подполосы, система может быть устроена таким образом, что пользователь может выбирать одну из таких множественных рекомендованных подполос для передачи. В другом варианте осуществления, пользователь может выбирать множественные рекомендованные подполосы для передачи. В еще одном варианте осуществления, одну или более из таких множественных рекомендованных подполос можно автоматически выбирать для передачи. Поскольку информация, представленная на фиг. 6a, основана на сканирование шума с высоким разрешением с использованием, т.е. с приращением 5 Гц, из данных можно извлекать значительный объем информации шума. Например, можно определять среднеквадратическое отклонение значений шума в каждой подполосе. Высоты различных столбиков на фиг. 6b можно взвешивать путем прибавления или вычитания значения на основании одной или более других статистик. Например, если среднеквадратическое отклонение для данной подполосы велико, в смысле относительно более широкого разброса значений шума, высота соответствующего столбика может оставаться неизменной или даже несколько увеличиваться. С другой стороны, если среднеквадратическое отклонение для данной подполосы мало, в смысле относительной близости значений шума в этой подполосе, высота соответствующего столбика на фиг. 6b может уменьшаться. Аналогично, высоты столбиков в гистограмме можно взвешивать на основании пикового шума таким образом, что подполоса, имеющая высокий пиковый шум, может несколько увеличиваться по высоте. В любом случае, взвешивание может осуществляться на основании порогов для соответствующих статистических значений. Взвешивание может применяться на основании отдельных статистических значений или комбинаций статистических значений. Оператор может соглашаться с автоматическим выбором подполосы, касаясь кнопки 780 "автоматический выбор" или касаясь любой подполосы, которую он желает выбрать. Оператор может отклонять автоматический выбор, например, на основании того, какие именно передатчики доступны в данный момент для осуществления подземных работ. В качестве другой основы для представления информации оператору, могут представляться другие статистические значения. Например, выбросы 781 (величины которых обозначены по отдельности) показывают пиковый шум в расчете на подполосу. Оператор может по своему выбору избегать подполосы, которая демонстрирует особенно высокий пиковый уровень шума, даже если средний шум для этой подполосы относительно низок. В целях отмены автоматического выбора, оператор может коснуться кнопки 782 "выбор вручную" и затем коснуться подполосы, которую он желает выбрать. В другом варианте осуществления, дисплей 36 на локаторе может отображать график, гистограмму или любую подходящую форму формата отображения, полученный(ую) из спектральной развертки, показанной на фиг. 6a, что позволяет оператору затем вручную выбирать одну из подполос, например, касаясь подполосы выбора на экране дисплея. В еще одном варианте осуществления, локатор 20 может позволять оператору первоначально вводить информацию, относящуюся к передатчикам, которые доступны для автоматического выбора подполосы, покрытой одним из этих передатчиков, за исключением подполос, которые недоступны, в соответствии с принципами патента США № 8729901, который имеет того же правообладателя, что и настоящая заявка, и таким образом, включенная посредством ссылки в полном объеме. Фиг. 6b демонстрирует подполосы, которые недоступны, на основании недоступных передатчиков, с использованием пунктирных линий. Напротив, сплошные линии указывают подполосы, которые доступны. В настоящем примере SB-1 и SB-5 - SB-7 недоступны. Согласно варианту осуществления, подполосы можно исключать на основании регулятивных ограничений. Таким образом, ни самому портативному устройству, ни оператору не разрешается выбрать частоты, нарушающие правила, установленные в конкретной юрисдикции. Такие ограничения частоты могут заранее устанавливаться производителем на региональной основе. Согласно варианту осуществления, портативное устройство 20 или какой-либо другой компонент системы, например, буровой станок 80, может быть снабжен приемником GPS, который может устанавливать место проведения подземных работ и затем искать местные требования к частотам.
Опять же, согласно фиг. 6b, показанный экран дисплея может оставаться ʺживымʺ, по меньшей мере, до завершения процесса выбора частоты. Таким образом, средний шум в расчете на подполосу можно отслеживать и отображать, либо сам по себе, либо взвешенный другими статистическими параметрами, в реальном времени в целях отслеживания оператором. Таким образом, оператор может перемещать локатор в некоторой области, наблюдая средний шум в различных подполосах. Например, оператор может обходить запланированную траекторию бурения и отслеживать шум вдоль траектории бурения до начала бурения. Таким образом, можно избежать подполос, особенно зашумленных в одной или более точках вдоль траектории бурения. Если оператор делает такой выбор, он может переместить локатор в другую точку, например, вдоль траектории бурения и инициировать повторное сканирование шума по всей полосе путем выбора кнопка 784 "повторное сканирование". Как рассмотрено выше, зашумленную среду можно характеризовать на основании приема с использованием одной или более антенн. Оператор может изменять режим приема с использованием кнопки 786. Например, в одном режиме приема, гистограмма на фиг. 6b может представляться на основании приема вдоль одной оси, например, оси X. В другом режиме приема, гистограмма может представляться на основании векторной суммы, вычисленной из трех ортогональных осей приема. После того, как оператор изменяет режимы приема, кнопка 784 "повторное сканирование" может инициировать новое сканирование шума и представлять значения шума на основании выбранного режима приема. Оператор может переключаться между различными режимами сканирования шума по своему желанию. Согласно варианту осуществления, сканирование шума, которая составляет основу для дисплея, показанного на фиг. 6b, может быть сканирование с высоким разрешением. Совместно с осуществлением сканирования шума, несколько оптимизированных низких частот шума можно выбирать автоматически на основании необходимого количества частот символа. Например, можно выбирать шестнадцать частот символа и частоту глубины в расчете на подполосу. Согласно варианту осуществления, в ходе представления шума в реальном времени на экране, показанном на фиг. 6b, шум в расчете на подполосу может представляться как среднее значений шума, измеренных на каждой из выбранных частот в каждой подполосе. Заметим, что выбор кнопки 784 "повторное сканирование" обуславливает новый или обновленный выбор частот в каждой подполосе. Локатор 20 может быть выполнен с возможностью хранения наборов выборов частоты, связанных с разными позициями измерения, например, в памяти 714, показанной на фиг. 9. Соответственно, выборы частоты оптимизируются для каждой позиции измерения таким образом, чтобы разные выборы можно было использовать в разные моменты времени в ходе работы. Термин ʺоптимизированныйʺ призван означать, что выбранные частоты выбираются с целью избегать помехи на основании одного или более статистических параметров, например, среднего шума, среднеквадратического отклонения и пикового шума. Наборы выборов частоты могут передаваться на передатчик, например, над землей, с использованием внешнего коммуникационного соединения 174, показанного на фиг. 3. Подземному передатчику можно предписывать любым подходящим образом переключаться на другой набор выборов частоты в ходе подземных работ. Например, переключение может предписываться на основании заранее определенной последовательности крен бурильной колонны или посредством передачи электромагнитного сигнала с поверхности земли для приема передатчиком 130, который, в этом случае, сконфигурирован как приемопередатчик. Некоторые варианты осуществления могут использовать бурильную колонну как электрический проводник или могут включать в себя общеизвестную компоновку "провод в трубе", что позволяет передавать данные между подземным передатчиком/приемопередатчиком и буровым станком. Например, буровой станок может отправлять команду через бурильную колонну для изменения частоты глубины.
Теперь обратимся к фиг. 10a, где изображен расширенный вид подполосы 6 из фиг. 6a, в целом, указанный ссылочной позицией 800. В целях настоящего рассмотрения, предполагается, что SB-6 доступна и выбрана оператором для использования в ходе подземных работ. Выбрав подполосу, можно устанавливать частоты для сигнала 120 глубины и сигнала 122 данных. Согласно варианту осуществления, частоты могут быть заранее определены, например, производителем или на основании предыдущего сканирования шума, как описано выше. В другом варианте осуществления, дисплей 36 можно использовать для представления спектрального графика, показанного на фиг. 10a, в любой подходящей форме, оператору локатора, чтобы оператор мог выбирать частоты. Фиг. 10b демонстрирует один вариант осуществления снимка экрана, где показан дисплей 36, иллюстрирующий SB-6. Очевидно, что локатор может обеспечивать функцию трансфокации на дисплее 36, который использует кнопку 802 "приблизить" и кнопку 804 "отдалить", позволяющие оператору расширять горизонтальные пределы отображения спектра для обеспечения детального выбора частоты. В целом, оператор может выбирать частоты, которые соответствуют точкам низкого шума на отображаемом спектре. Выборы можно округлять в соответствии с частотным разрешением передатчика, подлежащего использованию. Как рассмотрено выше, варианты осуществления передатчиков согласно настоящему изобретению могут иметь, в порядке неограничительного примера, частотное разрешение 5 Гц. На фиг. 10a идентифицирована двадцать одна точка низкого шума, указанная выносками (a)-(u). Согласно варианту осуществления, где используется одна частота глубины для сигнала 120 глубины и 16 частот символа, можно использовать семнадцать из этих 21 частот. Как описано выше, частота глубины может располагаться в любой позиции в подполосе, среди частот символа, на любом конце подполосы или даже в другой подполосе. В порядке одного примера, частоту глубины можно выбирать как точку самого низкого шума среди идентифицированных частот, которой в настоящем примере является частота (j). В еще одном варианте осуществления, частоты могут автоматически отбираться или повторно отбираться локатором 20, например, в соответствии с выбором оператором кнопки 806 ʺавтоматический отборʺ на дисплее 36. В одном варианте осуществления, процессор 710 может проверять спектр, показанный на фиг. 6a, для идентификации точек самого низкого шума, пока не появится подходящее количество частот символа. В других вариантах осуществления, процессор может осуществлять процесс выбора на основании любого подходящего способа. Например, можно выбирать самые низкие частоты шума, одновременно поддерживая минимальное разнесение между соседними частотами.
Опять же, согласно фиг. 10b, частоту можно добавлять, например, касаясь кнопки 808 "добавить частоту" и затем касаясь спектрального графика. Частоту можно удалять, например, касаясь кнопки 810 "удалить частоту" и затем касаясь частоты, подлежащей удалению. Частоту можно перемещать, например, касаясь кнопки 812 "переместить частоту" и затем касаясь и перетаскивая частоту, подлежащую перемещению. Выбранную подполосу можно изменять, касаясь кнопки 814 изменить подполосу. Как будет описано ниже, выбор частоты не ограничивается идентификацией точек низкого шума, но также можно рассматривать точки или области высокого шума спектральной развертки.
На фиг. 11 показан дополнительно расширенный вид спектральной области фиг. 10a от 24 кГц до 25 кГц, в целом, указанной ссылочной позицией 820 и показанной здесь в целях описания дополнительных деталей в отношении выбора частоты. Помимо идентификации точек низкого шума, как описано в отношении фиг. 10a, процессор 710 может применять так называемую ʺзапрещенную областьʺ. Последняя будет исключать любую идентифицированную низкую частоту шума, имеющую пик шума в выбранном частотном интервале 822 с центром на этой низкой частоте шума. Шум можно идентифицировать, например, на основании величины, которая превышает порог 824 на основании среднего значения шума для подполосы и/или значения шума, связанного с близлежащей точкой низкого шума. Согласно варианту осуществления, частотный интервал может иметь ширину приблизительно 60 Гц (+/-30 Гц), и порог может располагаться на 10 дБ или более выше соответствующей точки низкого шума. На основании использования такого частотного интервала, частоты (b) и (e) можно исключать в силу близости пиков 826 и 830, соответственно. В случае, когда требуется больше частот, процессор 710 может перепроверять спектр на фиг. 11 в целях идентификации нового набора частот-кандидатов.
На фиг. 12 показана блок-схема операций, которая демонстрирует вариант осуществления способа, в целом, указанного ссылочной позицией 900, действия локатора 20 при осуществлении спектрального сканирования и назначения частот в соответствии с настоящим изобретением. Способ начинается с этапа 904 и переходит к этапу 908, на котором осуществляется сканирование полного частотного спектра, например, от 0 Гц до 45 кГц для настоящего варианта осуществления, хотя для этого сканирования можно использовать любой подходящий диапазон. Сканирование может быть сканированием с высоким разрешением, например, с использованием разрешения 5 Гц, как рассмотрено выше. В другом варианте осуществления, сначала можно использовать сканирование с более низким разрешением, достаточным для установления среднего значения шума для каждой подполосы. Если процесс выбора подполосы опирается на сканирование спектра с более низким разрешением, затем сканирование спектра с высоким разрешением может осуществляться как часть процедуры выбор частоты, описанной ниже. Когда для подземных работ будет использоваться широкополосный передатчик, в целях выбора частоты можно применять только сканирование с высоким разрешением. На этапе 910 определяется среднее значение шума в расчете на подполосу. На этапе 914 можно рекомендовать подполосу на основании средних значений шума. В общем случае, можно рекомендовать подполосу, имеющую самое низкое среднее значение шума, хотя другие варианты осуществления могут использовать другие протоколы рекомендации. Например, можно рекомендовать подполосу, имеющую самое низкое пиковое значение шума. В порядке другого примера, как рассмотрено выше, можно рекомендовать более одной подполосы. На этапе 918, на дисплее 36 может запрашиваться пользовательский ввод, в котором пользователь может соглашаться с рекомендованной подполосой или выбирать другую подполосу. Например, пользователь может выбирать другую подполосу на основании сведений о передатчиках, которые доступны для осуществления подземных работ. Как рассмотрено выше, эта информация может служить начальным вводом, благодаря чему способ 900 исключает подполосы, не покрытые доступным(и) в данный момент передатчиком(ами). После выбора подполосы, способ переходит к этапу 920, на котором определяются частоты подполосы. Согласно варианту осуществления, частоты подполосы могут быть заранее определены и сохранены в памяти 714 локатора или в памяти 218 передатчика. В другом варианте осуществления, частоты подполосы может в оперативном режиме определять оператор, благодаря представлению подполосы на дисплее 36, как рассмотрено выше. В другом варианте осуществления, частоты подполосы могут определяться автоматически в соответствии с рассмотрениями, относящимися к фиг. 10 и 11, с применением или без применения запрещенного интервала, который применяется на этапе 924. В случае использования широкополосного передатчика для осуществления подземных работ, этапы 910 и 914 не требуются поскольку вся полоса передачи может быть доступна для выбора частоты без необходимости ограничивать частоты какой(ими)-либо конкретной(ыми) подполосой(ами), и на этапе 920 частоты могут выделяться по всей полосе передачи. Соответственно, частоты передачи могут выбираться автоматически по всей доступной полосе и/или по указанию пользователя на основании сканирования шума с высоким разрешением без необходимости в ограничениях назначения частот на основании подполос. Очевидно, что вариант осуществления широкополосного передатчика может быть выполнен с возможностью действовать, например, на основании предпочтений оператора, с использованием подполос таким же образом, как передатчики с ограничением подполосы, в которых назначение частот может ограничиваться одной или более подполосами, хотя это не требуется. На этапе 928, производится определение, достаточное ли количество частот было идентифицировано. Если нет, операция возвращается к этапу 920 для идентификации дополнительных частот. Если было идентифицировано достаточное количество частот, операция переходит к этапу 930, на котором рекомендуются частоты для сигнала 120 глубины и сигнала 122 данных. Этот последний этап может не требоваться в полностью автоматизированном варианте осуществления. На этапе 934, информация может представляться на дисплее 36 в целях сбора пользовательского ввода, например, одобряющего выборы частоты или изменяющего выборы частоты. Например, пользователь может предпочесть переместить частоту глубины в другое положение в подполосе или вовсе в другую подполосу. Конечно, в варианте осуществления широкополосного передатчика, не требуется налагать ограничения в отношении ограничения выбора частоты на конкретную полосу и/или подполосу. На этапе 938, выборы частоты можно переносить на передатчик 130 с использованием компоновки 722 внешней связи локатора и линии 174 связи внешней связи (фиг. 3) передатчика. Затем, на этапе 940, может вводиться нормальная работа.
Согласно варианту осуществления способа 900, количество выбираемых частот может основываться на зашумленной среде. Например, если сканирование шума на предмет ограничения подполос, показывает слабо зашумленную среду, можно выбирать относительно больше частот. В этом случае, можно использовать 32 или более частот символа вместо 16 частот символа. Если сканирование шума показывает сильно зашумленную среду, можно использовать относительно меньше частот символа, например, 4 или 8 частот символа вместо 16 частот. В целом, использование относительно меньшего количества частот позволяет избегать источников переменного шума в условиях высоких помех. С другой стороны, использование более высокого количества частот символа может увеличивать пропускную способность.
На фиг. 13 показана блок-схема операций, демонстрирующая вариант осуществления способа действия локатора 20 в нормальном режиме в ходе подземных работ, в целом, указанного ссылочной позицией 1000. Способ начинается с этапа 1004 и переходит одновременно к ветви 1010 определения глубины и ветви 1012 извлечения данных. Ветвь 1012 глубины принимает сигнал 120 глубины на этапе 1020 и затем определяет глубину передатчика на этапе 1024. Поскольку сигнал глубины передается на заданной частоте, сигнал глубины принимается на, по существу, непрерывной основе в ходе подземных работ. Соответственно, этапы 1020 и 1024 циклически повторяются в режиме нормальной работы локатора. Как описано выше, на этапе 1024 сигнал глубины может использоваться для определения глубины передатчика на основании уравнений диполя. Согласно варианту осуществления, часть определения глубины может включать в себя компенсацию расстояния локатора над поверхностью земли. Ветвь 1012 извлечения данных начинается с этапа 1030, на котором сигнал 122 данных принимается в форме потока символов, который может состоять из многобитовых символов. На этапе 1034, поток символов может временно сохраняться для декодирования, например, в памяти 714 (фиг. 9). На этапе 1038, процессор 710 декодирует поток символов. В связи с этим, один из символов можно использовать в качестве символа синхронизации, который может идентифицировать начало структуры пакета. Согласно варианту осуществления, который использует 4-битовый символ (т.е. 16 частот символа), семнадцатую частоту символа можно добавлять в целях представления символа синхронизации в потоке символов. Одна подходящая структура пакета, в порядке неограничительного примера, может быть представлена рядом 4-битовых переменных S, P1, R1, P2, R2, BT1, BT2, R3, где S имеет фиксированное значение, которое соответствует синхросимволу, P1 - переменная, представляющая первые четыре бита (0-3) значения тангажа, R1 - первая переменная крена, характеризующая ориентацию крена, P2 - биты 4-7 значения тангажа, BT1 - первые четыре бита (0-3) данных батареи и температуры, BT2 - биты 4-7 данных батареи и температуры, и R3 - третья переменная крена. В связи с этим, очевидно, что значение тангажа накапливается на основании двух разных переменных, соответствующих двум символам в потоке символов, которые разделены еще одним символом. Таким образом, к четырем битам P2 можно присоединить к четыре бита P1 для представления полного значения тангажа. Дополнительные биты можно, при желании, присоединять на основании другой переменной тангажа. Аналогично, 8 битов данных батареи и температуры могут собираться на основании двух последовательных переменных BT1 и BT2. На этапе 1040, поток данных можно повторно собирать на основании декодированного потока символов для реконструкции исходных данных, которые составляли основу для потока символов в передатчике 130. На этапе 1044, процессор 710 извлекает параметры из потока данных. Эти параметры могут представлять параметры ориентации, например, тангаж и крен, температуру, давление, напряжение и ток батареи, и любые другие данные, представляющие интерес. На этапе 1048, процессор 710 реагирует на извлеченные параметры любым подходящим образом, например, предписывает дисплею 36 указывать тангаж и крен, состояние батареи, температуру и давление и/или в случае их передачи другим процессам, например, обеспечивать предупреждения о нарушении порогов, относящихся к температуре и давлению. Затем операция возвращается к этапу 1030.
Продолжая рассматривать работу передатчика 130 в нормальном режиме, очевидно, что мощность передачи может выделяться неравномерно между различными частотами, которые передаются, например, перечисленными в таблице 3. В одном варианте осуществления, каждая частота может выделяться одинаковая величина мощности передачи. В другом варианте осуществления, мощность передачи может выделяться неравномерно между частотами. Например, одной или более частотам может назначаться более высокая мощность передачи, чем другой группе частот. В еще одном варианте осуществления, каждой частоте может назначаться отдельная мощность передачи. Такое выделение мощности может осуществляться любым подходящим образом. Например, согласно варианту осуществления, портативное устройство 20, показанное на фиг. 1 и 9, может быть выполнено с возможностью отслеживания средней интенсивностью сигнала, связанной с каждой частотой, поскольку каждая частота принимается в ходе нормальной работы. Затем мощность передачи может повторно выделяться в оперативном режиме среди частот на основании скользящего среднего интенсивности сигнала. Например, внезапное увеличение интенсивности сигнала данной частоты обычно обусловлено помехой, в связи с чем, этой частоте может выделяться дополнительная мощность. В некоторых вариантах осуществления, низким частотам шума могут выделяться относительно более низкие мощности передачи, тогда как более высоким частотам шума могут выделяться относительно более высокие мощности передачи. Значения повторно выделяемой мощности передачи можно переносить на передатчик 130 любым подходящим образом. Например, портативное устройство 20 может передавать повторно выделяемую схему мощности на буровой станок 80 посредством телеметрического сигнала 44. Затем буровой станок может переносить новую схему мощности на передатчик 130 через бурильную колонну, используя последнюю в качестве электрического проводника. В другом варианте осуществления, портативное устройство 20 может быть снабжено дополнительной антенной 712 (фиг. 1), например, дипольный антенной, для передачи сигнала для непосредственного приема передатчиком 130. Модуляция этого сигнала может декодироваться передатчиком 130 для извлечения новой схемы мощности.
Возвращаясь к фиг. 10b, выделение мощности среди выбранных частот также может осуществляться в процессе выбора частоты или режима, до входа нормальный режим работы. Например, выделение мощности может основываться на значении шума, которое связано с каждой выбранной частотой, как показано на фиг. 10 и 10a. Хотя, в целях иллюстрации, показано, что низкие частоты шума, идентифицированные на фиг. 10 и 10a, демонстрируют примерно равные значения шума, это не обязательно. При наличии значительного различия среди значений шума для самых низких идентифицируемых частот шума, мощность передачи можно выделять в более высокой пропорции частотам, демонстрирующим относительно более высокие значения шума. Напротив, мощность передачи, выделяемая очень низкой частоте шума, может быть относительно низкой для обеспечения возможности выделения дополнительной мощности одной или более другим частотам. Мощность передачи также может выделяться в соответствии с применением запрещенного интервала, как описано выше. Например, если конкретная частота выбирается таким образом, что гармоника электропитания или другая шумовая аномалия попадает в запрещенный интервал для этой конкретной частоты, конкретной частоте может выделяться дополнительная мощность. Очевидно, что в любом варианте осуществления, в котором выделяемая мощность передачи может изменяться от частоты к частоте, такое выделение может осуществляться на основании общего энергопотребления, в частности, когда передатчик 130 получает питание от батареи. Это позволяет снижать общее энергопотребление или поддерживать общее энергопотребление на запланированном уровне.
Согласно фиг. 14, в другом варианте осуществления, система 10 может быть выполнена с возможностью определения глубины на основании сигнала 122 данных без необходимости передачи сигнала глубины. Заметим, что приемник 20, показанный на фиг. 9, может быть выполнен с возможностью включать в себя любой из описанных ниже детекторов. На фиг. 14 показана блок-схема варианта осуществления детектора глубины, в целом, указанного ссылочной позицией 1100, который составляет часть локатора 20. В этом варианте осуществления, показано количество n полосовых фильтров BPa-BPn, причем каждый полосовой фильтр имеет достаточно широкую характеристику, чтобы пропускать символы каждой частоты. Согласно варианту осуществления, полосовой фильтр обеспечен для каждой частоты a-n символа. Выходные сигналы фильтров поступают на соответствующие амплитудные детекторы 1108a-1108n, каждый из которых обеспечивает выходной сигнал на маршрутизатор 1110 пиковой амплитуды, который отслеживает выходные сигналы амплитудных детекторов для определения, какой амплитудный детектор обеспечивает самое высокое выходное значение. В ходе работы, маршрутизатор 1110 пиковой амплитуды переносит самый высокий обнаруженный амплитудный выходной сигнал на фильтр 1120 низких частот. Выходной сигнал 1122 фильтра низких частот пропорционален глубине передатчика в целях вычисления глубины.
Согласно фиг. 15, другой вариант осуществления детектора глубины в целом, указан ссылочной позицией 1100ʹ. В этом варианте осуществления, n умножителей M1-Mn умножают каждую частоту или тон на соответствующую частоту, полученную смещением предыдущей частоты на постоянную величину. Полученный сигнал для каждой частоты или тона образован суммой двух частот и разностью двух частот, которая равна смещению. Выходные сигналы n умножителей, каждый из которых имеет надлежащую частоту умножителя, могут суммироваться сумматором 1140 с образованием сигнала 1144 непрерывной фазы на частоте смещения. Сигнал непрерывной фазы поступает на узкий полосовой фильтр 1148. Выходной сигнал 1150 полосового фильтра 1148 пропорционален глубине передатчика.
Согласно фиг. 16, еще один вариант осуществления детектора глубины в целом, указан ссылочной позицией 1160. В этом варианте осуществления, на вход 1162 поступает входной поток 122 символов обработанный кодом исправления ошибок, например, кодом Рида-Соломона (RS). Последний может применяться кодером 1164 EC (исправления ошибок), показанным на фиг. 3, через процессор 200. Фиг. 17 демонстрирует кодовое слово Рида-Соломона как часть потока символов, включающего в себя блок 1166 символов данных, начинающийся с синхросимвола, к которому присоединен блок исправления RS или данные 1168 четности. Заметим, что символы данных и символы Рида-Соломона могут передаваться разнообразными способами. Например, символы RS можно присоединять в виде блока, как показано. В другом варианте осуществления, символы RS могут вклиниваться между символами данных. Входной поток символов поступает на демодулятор 1170, который извлекает поток данных, подверженный возможным ошибкам передачи. Заметим, что код RS способен исправлять не более определенного количества символов для каждого кодового слова RS, на основании общеизвестных параметров. В настоящем варианте осуществления, можно исправлять до двух символов. Извлеченный поток символов переносится на аккумулятор 1172, который может буферизовать извлеченные данные в целях идентификации кодовых слов RS как части потока данных. В качестве части данных, принятая амплитуда может быть связана с каждым символом данных. Начало кодового слова, например, можно идентифицировать на основании присутствия символа синхронизации. При наличии кодового слова, кодовое слово можно переносить на декодер 1174 исправления ошибок (EC). Затем декодер EC декодирует кодовое слово и осуществляет исправления до предела способности исправления кода. Каждый исправленный символ идентифицируется как таковой в ходе этот процесс. На этапе 1176, оцениватель амплитуды связывает надлежащие амплитуды с символами, исправленными кодом RS. В связи с этим, очевидно, что символ, неверно идентифицированный демодулятором 1170, неправильно связывается с частотой символа. Оцениватель 1176 исправляет это неправильное связывание. Исправленные амплитуды частот символа переносятся на фильтр 1120 низких частот. Выходной сигнал 1122 фильтра низких частот пропорционален глубине передатчика в целях вычисления глубины. Согласно варианту осуществления, определение глубины может основываться на количестве значений амплитуды из одной или более частот символа.
Теперь обратимся к фиг. 17, где показана блок-схема операций, демонстрирующая вариант осуществления способа, в целом, указанного ссылочной позицией 1180 для определения глубины на основании частот символа и без необходимости передачи сигнала глубины. Способ начинается с этапа 1182 и переходит к этапу 1184, на котором поток 122 символов кодируется и передается от варианта осуществления передатчика в соответствии с настоящим изобретением, будучи обработан кодом исправления ошибок, например, кодом Рида-Соломона. На этапе 1186, поток символов принимается приемником 20 (фиг. 9). На этапе 1188, принятый поток символов буферизуется, и текущее кодовое слово RS извлекается. На этапе 1190, кодовое слово декодируется. На этапе 1192, если определено, что текущее кодовое слово невозможно декодировать, поскольку количество символов в ошибке превышает способность исправления кода, операция переходит к этапу 1186 для приема следующего кодового слова таким образом, что текущее кодовое слово игнорируется, по меньшей мере, в отношении участия в определение глубины. С другой стороны, если кодовое слово можно декодировать, операция переходит к этапу 1194. На этапе 1194, если ни один символ не был исправлен, операция переходит к этапу 1196, на котором детектор 1100 глубины, показанный на фиг. 14, используется для определения глубины передатчика. Затем операция возвращается к этапу 1186 для приема следующего символа. Если один или более символов было исправлено, операция переходит от этапа 1194 к этапу 1198, на котором используется детектор 1160 глубины на основе исправления ошибок, показанный на фиг. 16, для определения глубины передатчика.
Согласно фиг. 18, вариант осуществления антенны 26, изображенной на фиг. 1, показан на дополнительно увеличенном схематическом виде в целях иллюстрации деталей его структуры. Антенна 26 включает в себя первую и вторую антенны 1200a и 1200b на ферритовых стержнях, каждая из которых поддерживает соответствующую антенную катушку 1204a и 1204b, которые представляют антенны Y и Z, показанные на фиг. 9. Антенны на ферритовых стержнях могут быть установлены на противоположных главных поверхностях печатной платы (PCB) 1210. Последняя образует антенную катушку 1214 (показанную частично), которая выступает в роли антенны X на фиг. 9. Как показано на последней фигуре, PCB вертикально ориентирована, по меньшей мере, в целом, вдоль оси локатора. Заметим, однако, что антенна может быть ориентирована любым подходящим образом в локаторе 20, не ограничиваясь показанной ориентацией.
Ввиду вышеизложенного, предполагается, что система, соответствующее устройство и способы настоящего изобретения свободны от ограничений уровня техники в отношении попытки во что бы то ни стало идентифицировать ʺмагическуюʺ частоту согласно уровню техники. Напротив, использование структуры потока многобитовых символов, которая назначает разные частоты разным символам, может служить для повышения пропускной способности и/или ограничения передаваемого спектрального состава для обеспечения повышенной помехоустойчивости. Дополнительно, настоящее изобретение обеспечивает индивидуальную настройку частот, что позволяет отстраиваться от шума/помехи в данной области. Эта индивидуальная настройка частот может даже различаться в разные моменты времени для одной и той же области. Дополнительно, настоящее изобретение предоставляет возможности в отношении избегания частот гармоник электропитания, которые предполагаются ранее неизвестными, по меньшей мере, в отношении горизонтального направленного бурения в целях установки коммунального оборудования. В частности, частоты символа, которые передаются в контексте настоящего изобретения, модулируются таким образом, что соседние гармоники электропитания, не по существу, не несут никакого спектрального состава. Традиционные методы, напротив, часто используют спектральную огибающую модуляции, которая перекрывает несколько гармоник электропитания, таким образом, помещая содержание сигнала вверху гармоник электропитания. На стороне приемника, перекрытые гармоники электропитания затем необходимо отбирать совместно с модулированным сигналом. Настоящее изобретение, напротив, использует прием частоты символа, на основании изложенного метода передачи, который подавляет соседние гармоники электропитания. Эти возможности возникают, по меньшей мере, на основании передачи потока многобитовых символов с обеспечением точного позиционирования частот символа при ограничении и позиционировании спектральной полосы, связанной с каждым символом потока символов, ранее неизвестным образом относительно гармоник электропитания.
В другом варианте осуществления, система 10 может использовать так называемое ʺмолчащее синхроʺ или ʺпустое синхроʺ. В этом варианте осуществления, вместо передачи синхросимвола, интервал символа остается чистым, пустым или молчащим. Этот интервал символа в дальнейшем может именоваться пустым символом. Фиг. 19 демонстрирует другой иллюстративный выходной сигнал 390ʹ генератора 352 ШИМ канала символа (фиг. 4), в котором потоку символов, указанному как символы 392b-392f, предшествует пустой символ 1300, имеющий такую же продолжительность времени, как один из символов в потоке символов, хотя можно использовать любую подходящую длительность. Очевидно, что молчащее синхро можно использовать с формами модуляции, включающими в себя, но без ограничения, двоичную фазовую манипуляцию (BPSK), дифференциальную двоичную фазовую манипуляцию (DBPSK), манчестерское кодирование, квадратную фазовую манипуляцию (QPSK), M(ичную) PSK и т.д.
Фиг. 20 демонстрирует вариант осуществления передаваемого потока данных, в целом, указанного ссылочной позицией 1240, иллюстрируя дополнительные детали в отношении молчащего синхро. В целях настоящего примера, предполагается, что используется такая форма модуляции, как BPSK, хотя настоящие описания пользуются широкой применимостью в отношении типа модуляция. Интервал F кадра включает в себя полную длительность, которая может соответствовать пакету или кадру данных. Интервал F кадра состоит из синхроучастка S и участка D данных, содержащего информацию, которая может модулироваться на основе одной или более несущих частот. Синхроучасток S может быть образован пустым символом NS или пустым битом и битом RB обращения. В примере BPSK можно использовать единственную несущую частоту.
Согласно фиг. 21, участок принятого сигнала, соответствующего передаваемому потоку данных, показанному на фиг. 20, в целом, указан ссылочной позицией 1300. Принятый сигнал, подверженный шуму, центрирован на 0 вольт и изображен на графике в зависимости от времени, отложенного по горизонтальной оси. Синхроучасток S показан совместно с частью участка D данных. Фиг. 22 демонстрирует форму волны 1320, полученную возведением в квадрат формы волны, изображенной на фиг. 21. Хотя возведение в квадрат не требуется, на основании возведения в квадрат формы волны можно видеть, что пустой символ NS демонстрирует значительно более низкую величину на фиг. 22, чем пиковые амплитуды, которые присутствуют в бите RB обращения и участке D данных формы волны, что облегчает идентификацию пустого символа, например, путем сохранения принятого сигнала в буфере. Заметим, что этот метод может быть эффективен даже в средах с относительно высокими уровнями помехи и/или на глубинах бурильного инструмента, где отношение сигнал/шум значительно снижено. В сильно зашумленных средах можно применять усреднение по ансамблю, при котором множественные кадры данных могут храниться в буферной памяти и затем добавляться в целях синхронизации извлечения. Усреднение по ансамблю подробно описано, например, в патентной заявке США № 14/208470, которая имеет того же правообладателя, что и настоящая заявка, и включенной в данное описание в порядке ссылки.
Теперь обратимся к фиг. 23, которая демонстрирует вариант осуществления способа эксплуатации системы настоящей заявки с использованием молчащего синхро, в целом, указанного ссылочной позицией 1400. Способ начинается с этапа 1402 и переходит к этапу 1404, на котором передается поток данных, включающий в себя пустой синхроучасток или синхросимвол. На этапе 1406 поток данных принимается. На этапе 1408 поток данных может возвратиться в квадрат. Для относительно слабо зашумленных сред, очевидно, что возведение в квадрат потока данных может не требоваться. На этапе 1408 поток данных декодируется на основе идентификации пустого синхросимвола. На этапе 1410 предпринимается попытка декодировать возведенный в квадрат поток данных, включающая в себя идентификацию пустого синхросимвола. На этапе 1412, в случае успешного декодирования, операция переходит к этапу 1414 с цепью использования извлеченных данных. С другой стороны, если попытка декодирования не увенчалась успехом, операция переходит к этапу 1416, на котором применяется усреднение по ансамблю. На этапе 1418, данные извлекается на основании усреднения по ансамблю. Затем извлеченные данные используются на этапе 1414.
Общеизвестно, что точность системы для электронного измерения глубины бурильного инструмента при осуществлении подземных работ может снижаться в результате скин-эффекта, обусловленного проводимостью земли. В отсутствие компенсации может вкрадываться ошибка, в результате которой будет создаваться впечатление, что бурильный инструмент находится на глубине, меньшей его фактической глубины. Методы компенсации ошибки скин-эффекта, ограниченные влиянием на показания глубины бурильного инструмента, описаны подробно в патенте США № 6285190 (в дальнейшем именуемом патентом ʹ190), который имеет того же правообладателя, что и настоящая заявка, и включенный в данное описание в порядке ссылки. При этом заявители дополнительно понимают, что аналогичное явление на поверхности земли, в дальнейшем именуемое ʺповерхностным эффектомʺ, может снижать точность такой системы при ее эксплуатации на земле, например, совместно с системами демонстрации или тестирования для потребителя. Таким образом, когда бурильный инструмент и портативное устройство разделены на поверхности земли известным расстоянием, расстояние на основе интенсивности сигнала между ними, определяемое портативным устройством, может значительно отличаться от известного расстояния в отсутствии компенсации поверхностного эффекта. Хотя можно предположить, что решением является осуществление калибровки скин-эффекта на поверхности земли для компенсации поверхностного эффекта, в патенте ʹ190 установлено, что калибровка скин-эффекта на поверхности земли затруднена в ходе фактических буровых работ, поскольку может встретиться значительная ошибка глубины по сравнению с ошибкой глубины, наблюдаемой в ответ на подземную процедуру калибровки скин-эффекта. В виду представленных выше неразрешенных проблем, заявители предлагают многорежимную компоновку, которая работает в наземном режиме для обеспечения повышения точности на основе интенсивности сигнала для наземных показаний, относящихся к поверхностному эффекту, и в подземном режиме, в котором не применяется такая же компенсация поверхностного эффекта, как в наземном режиме, благодаря чему подземная производительность не снижается в отношении точности показаний глубины. Соответственно, компенсация поверхностного эффекта в наземном режиме отличается от компенсации, при наличии, которая применяется в подземном режиме. В некоторых вариантах осуществления, в подземном режиме может применяться компенсация скин-эффекта. В других вариантах осуществления, в подземном режиме можно работать без компенсации скин-эффекта.
На фиг. 24 показан график, в целом, обозначенный ссылочной позицией 1500, который демонстрирует ошибку поверхностного эффекта, отложенную по вертикальной оси, в зависимости от горизонтального расстояния, отложенного по оси X, между портативным устройством, например, портативным устройством 20, показанным на фиг. 1, и бурильным инструментом, показанным на фиг. 2, или другим передатчиком, который передает электромагнитный сигнал, например, сигнал 120 глубины, или модулированный сигнал, из которого можно определить глубину на основании интенсивности сигнала. Ошибку поверхностного эффекта 1504 можно охарактеризовать как:
 (Ур. 2)
(Ур. 2)
где x - разнесение или расстояние между бурильным инструментом и портативным устройством, SEE - ошибка поверхностного эффекта, и k - постоянная для конкретного положения измерения. Постоянная k может изменяться с изменением положения в результате активной и/или пассивной помехи в области, условий почвы и других факторов. Заметим, что SEE можно выражать любой подходящей функцией, не ограничиваясь кубичной функцией. Процедура калибровки на основании уравнения (2) может осуществляться путем размещения портативного устройства на известном или измеренном расстоянии, dm, от бурильного инструмента на поверхности земли. Заявитель установил, что подходящее значение dm для осуществления процедуры калибровки может составлять 50 футов; однако калибровка может осуществляться с другими значениями dm при условии, что (1) значение dm не настолько мало, чтобы измеренная SEE в конкретном положении измерения была неощутима, и (2) значение dm не настолько велико, чтобы выходить за пределы диапазона измерений устройства. Когда эта физическая компоновка находится на месте, портативное устройство определяет расстояние dSS до бурильного инструмента на основании интенсивности сигнала для сигнала 120 глубины. Значение ошибки поверхностного эффекта для измеренного расстояния dm показано на фиг. 24 как смещение от оси X в dm и может определяться на основании:
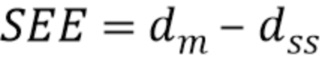 (Ур. 3)
(Ур. 3)
Очевидно, что значение SEE в общем случае будет больше нуля, поскольку в результате поверхностного эффекта dss обычно бывает меньше dm. Уравнение 2 можно решать с учетом значения постоянной k с использованием значения SEE, определенного из уравнения 3, и измеренного значения dm. Затем компенсация поверхностного эффекта может применяться на основании уравнения (2) с использованием определенного значения k всякий раз, когда наземное расстояние (AGR) между бурильным инструментом и портативным устройством определяется на основании интенсивности сигнала. В частности, значение скомпенсированного наземного расстояния, AGRCOMP можно определять для любого значения измеренной интенсивности сигнала dss на основании:
 (Ур. 4)
(Ур. 4)
На основании вышеизложенного, портативное устройство 20 можно эксплуатировать в режиме проверки наземного расстояния (AGRT), в котором компенсация поверхностного эффекта применяется к любому расстоянию или дальности на основе интенсивности сигнала, определяемому портативным устройством. Когда бурильный инструмент является подземным, портативное устройство 20 можно эксплуатировать в нормальном режиме, который позволяет определять глубину бурильного инструмента на основании интенсивности сигнала без применения компенсации поверхностного эффекта или с применением компенсации скин-эффекта, которая осуществляется иначе, чем компенсация поверхностного эффекта, что позволяет устанавливать глубину бурильного инструмента с более высокой степенью точности. Заметим, что параметры компенсации поверхностного эффекта и параметры компенсации скин-эффекта, если используются, могут храниться в памяти 714 портативного устройства, как явствует из фиг. 9.
На фиг. 25 показана схематическая иллюстрация варианта осуществления внешнего вида дисплея 36 (фиг. 1) портативного устройства 20, действующего в режиме AGRT, в целом, указанного ссылочной позицией 1600. Бурильный инструмент 90 изображен отстоящим в поперечном направлении от портативного устройства 20, причем значение смещения компенсации поверхностного эффекта указано позицией 1610 равным 10 футам. Очевидно, что графика, показанная на снимке экрана, показанного фиг. 26, отчетливо указывают пользователю, что показано расстояние до стороны локатора, а не глубина под локатором. В режим AGRT можно входить, например, на основании выбора оператором режима AGRT, который доступен на экране калибровки. В противном случае, портативное устройство работает в нормальном режиме.
На фиг. 26 показана схематическая иллюстрация варианта осуществления внешнего вида дисплея 36 (фиг. 1) портативного устройства 20, действующего в нормальном режиме, в целом, указанного ссылочной позицией 1630. Портативное устройство показано как в виде сверху (вверху слева), так и в вертикальном разрезе (вверху справа). Бурильный инструмент 90 и портативное устройство показаны относительно точки 1634 определения местоположения вперед. Дополнительную информацию, касающуюся точки определения местоположения вперед, можно найти, например, в патенте США № 6496008, который имеет того же правообладателя, что и настоящая заявка, и включенный в данное описание в порядке ссылки. Поперечное расстояние 1638 от бурильного инструмента до позиции непосредственно под точкой определения местоположения вперед показано равным 6 футам, 0 дюймам. Прогнозируемая глубина бурильного инструмента 1640 на бурильном инструменте, по достижении точки определения местоположения вперед, показана равной 8 футам, 7 дюймам, и высота над землей портативного устройства 1644 показана равной 2 футам, 0 дюймам.
На фиг. 27 показана блок-схема операций, которая демонстрирует вариант осуществления способа, в целом, указанного ссылочной позицией 1700, действия портативного устройства 20 в двухрежимной конфигурации, включающей в себя режим AGRT и нормальный режим. Способ начинается с этапа 1704 и переходит к этапу 1708, на котором отслеживается выбор, производимый оператором для осуществления калибровки для режима AGRT. Если калибровка AGRT не выбрана, операция переходит к нормальной работе на этапе 1710. С другой стороны, если калибровка AGRT выбрана, операция переходит к этапу 1712, на котором инициируется процедура калибровки, например, как описано выше совместно с фиг. 25. На этапе 1714 производится определение, успешно ли произведена калибровка AGRT. Определение, успешно ли произведена калибровка AGRT, может основываться на различных факторах. Например, определенное значение постоянной k можно сравнивать с допустимым диапазоном. В порядке другого примера, значение k можно определять при разных расстояниях между портативным устройством и бурильным инструментом и затем сравнивать. С точки зрения определения значения k, на основании уравнения (20), можно предполагать, что величина ошибки поверхностного эффекта увеличивается с увеличением расстояния между портативным устройством и бурильным инструментом. Если калибровка не удалась, повторно осуществляется этап 1712. В случае успешной калибровки, операция переходит к этапу 1718, на котором отслеживается выбор оператором режима AGRT. Если оператор не выбирает режим AGRT, на этапе 1710 осуществляется переход к нормальной работе. Если на этапе 1724 оператор выбирает режим AGRT, происходит возврат к этапу 1712 для другой калибровки AGRT. Если дополнительная калибровка не выбрана, на этапе 1728 происходит переход в режим AGRT. На этапе 1730 осуществляется проверка, желает ли оператор выйти из режима AGRT, например, на основании триггера 48 активации (фиг. 1). Если оператор выбирает выход, осуществляется переход к нормальной работе 1710. В противном случае, операция остается в режиме AGRT. Очевидно, что нормальный режим 1710 позволяет оператору выбирать калибровку, при которой операция возвращается к этапу 1724.
Теперь обратимся к фиг. 28, где показана блок-схема варианта осуществления секции приемника, в целом, указанного ссылочной позицией 2000, который можно реализовать как часть устройства 20, показанного на фиг. 9, в целях приема и обработки сигнала 122 данных. Секция 2000 приемника включает в себя блок расслоения для приема сигнала данных в виде срезов 2004 таким образом, что более одного среза связано с периодом одного символа в потоке символов, который составляет сигнал 122 данных. Каждый временной срез может именоваться временным срезом спектрограммы (STS). В настоящем варианте осуществления, пять временных срезов принимаются в течение каждого периода символа, хотя может приниматься любое подходящее количество срезов. Соответственно, каждый символ можно рассматривать как передискретизированный. Каждый STS характеризует интенсивность сигнала на всех используемых частотах символа, хотя только одна частота символа активна в любой данный момент времени (см., например, выходной сигнал 390 передатчика на фиг. 4). Активная частота символа, в общем случае, имеет значительно более высокую амплитуду, чем остальные частоты, в зависимости от текущей зашумленной среды. В настоящем примере, используется 16 частот 2008 символа, хотя настоящее описание применимо к любому количеству частот символа. На блоке 2010, для текущего среза, средний уровень сигнала определяется для комбинации частот символа, которая используется таким образом, что измеренный уровень сигнала на каждой частоте символа вносит вклад в определенный средний уровень сигнала. Средний уровень сигнала является выходным сигналом 2012. Фильтр 2014 низких частот применяет фильтрацию к среднему уровню сигнала. Можно использовать любую подходящую форму фильтра низких частот, например, низкочастотный фильтр Баттеруорта. Фильтр низких частот сконфигурирован с постоянной времени, которая велика по сравнению с периодом времени символа, что позволяет эффективно усреднять вклады событий или коротких импульсов шума, представленных как часть среднего уровня сигнала каждого временного среза. Таким образом, выходной сигнал 2018 фильтра отслеживает или повторяет внешний уровень шума на основании интенсивностей вкладов в сигнал от неактивных частот символа для каждого среза совместно с вкладом от активной частоты символа. секция 2020 смещения порога задает значение приращения, прибавляемое к среднему уровню сигнала. Прибавляемое значение, например, может соответствовать некоторому проценту среднего уровня сигнала, например, фиксированной величине. Сумматор 2022, который образует часть детектора 2024 порога, прибавляет значение выходного сигнала 2018 фильтра низких частот для вывода порога 2028. Средний уровень 2012 сигнала также поступает на компаратор 2030, который образует другую часть детектора 2024 порога. Компаратор сравнивает порог 2028 со средним значением 2012 и возбуждает переключатель 2040 временных срезов в соответствии с этим сравнением. Буфер 2044 спектрограммы выполнен с возможностью выборочно принимать временные срезы от переключателя временных срезов. Буфер спектрограммы может включать в себя длину, которая обеспечивает сохранение всех временных срезов STS1 - STSn, которые связаны с полным пакетом. В порядке неограничительного примера, если пакет включает в себя 20 позиций символов, некоторые из которых могут быть связаны с исправлением ошибок, и каждый период символа расслаивается пять раз, буфер спектрограммы позволяет сохранять 100 временных срезов, таким образом, что n=100. Если компаратор 2030 определяет, что текущее среднее значение 2012 для текущего временного среза больше порога 2028, переключатель 2040 временных срезов устанавливается в позицию T (истина), благодаря чему текущий временной срез не маршрутизируется в одну из позиций STS в буфере 2044 спектрограммы. Как будет понятно, надлежащий указатель позиции STS, в этом случае, заполняется нулями. С другой стороны, если компаратор 2030 определяет, что текущее среднее значение 2012 не превышает порога 2028, переключатель 2040 временных срезов устанавливается в позицию F (ложь), благодаря чему текущий временной срез маршрутизируется в надлежащую одну из позиций STS в буфере спектрограммы. На основании вышеизложенного и как показано вставным графиком 2050, очевидно, что средний уровень 2012 сигнала, в общем случае, окажется ниже порога 2028, за исключением всплесков 2054 шумов. Таким образом, срезам, возникающим во время всплесков 2054 шумов, не разрешается вносить вклад в пакет, умещающийся в длину буфера 2044 спектрограммы.
Теперь обратимся к фиг. 29, которая демонстрирует вариант осуществления способа, в целом, указанного ссылочной позицией 2100, загрузки временных срезов спектрограммы в буфер 2044 спектрограммы, показанный фиг. 28. Способ начинается с этапа 2104 и переходит к этапу 2108 приема сигнала 122 данных. На этапе 2110, буфер 2044 спектрограммы очищается. На этапе 2114, указатель буфера спектрограммы сбрасывается для указания первой одной из позиций STS в буфере. На этапе 2118, текущий срез демодулируется для измерения уровня сигнала на частоте каждого символа в срезе. В настоящем примере применяется 16 частот символа, что позволяет определить 16 уровней сигнала. На этапе 2120, средний уровень сигнала определяется на основании измеренных уровней сигнала. Средний уровень сигнала переносится на этап 2124 установления порога (см. блок 2020 на фиг. 28), фильтр 2128 низких частот (см. блок 2014 на фиг. 28) и этап 2130 сравнения (см. блок 2024 на фиг. 28). На этапе 2124 установления порога значение приращения прибавляется к среднему уровню сигнала, как рассмотрено выше, и это значение передается на этап 2134 суммирования (см. блок 2022 на фиг. 28). НЧ фильтр 2128 применяет низкочастотную фильтрацию к среднему уровню сигнала, как рассмотрено выше, и выдает фильтрованный выходной сигнал на сумматор 2134. Последний прибавляет значение приращения к фильтрованному выходному сигналу для передачи порога на этап 2130 сравнения. На этапе 2130 сравнения порог сравнивается с текущим средним значением текущего среза. Если текущее среднее значение больше порога, операция переходит к этапу 2136, на котором текущая позиция STS (указанная указателем STS) заполняется нулями. Это препятствует ненадлежащему увеличению среднего значения конкретного среза за счет кратковременных аномалий шума, которое может приводить к увеличению ошибок декодирования. С другой стороны, если текущее среднее значение меньше порога, на этапе 2138 измеренные уровни на частотах символа (16 измеренных уровней в настоящем примере) загружаются в текущую позицию STS. На этапе 2140, значение указателя STS проверяется для определения, полон ли буфер 2044 спектрограммы. Если нет, указатель STS получает приращение на этапе 2144. Если буфер спектрограммы полон, операция переходит к этапу 2148 декодирования пакета. Далее будут описаны детали варианта осуществления процесса декодирования пакета. Заметим, что, хотя длина буфера спектрограммы совпадает с длиной пакета, фактическая начальная позиция пакета в буфере спектрограммы неизвестна в этом месте соединения для декодирования цели. После этапа 2148, операция возвращается к этапу 2114 для сброса указателя STS при подготовке к следующему пакету.
Фиг. 30 схематично демонстрирует содержимое буфера 2044 спектрограммы, полученное в результате загрузки буфера согласно способу 2100, показанному фиг. 29, а также дополнительные детали, относящиеся к этому содержимому. В настоящем примере используется структура пакета, содержащая 20 символов, причем каждый символ представлен 5 временными срезами спектрограммы в буфере. Как рассмотрено выше, пакеты принимаются, по существу, асинхронно. Период времени структуры пакета в целом и каждого из ее символов гарантируется на основании достаточной стабильности тактирования на передающем и приемном концах процесса. Данные обычно загружаются или потоково передаются в начало длины буфера спектрограммы на произвольном срезе некоторого произвольного символа в текущем пакете и доходят до начального участка следующего пакета. Временные срезы для данного символа могут следовать друг за другом в буфере спектрограммы или зацикливаться после конца буфера спектрограммы. Соответственно, структура пакета может начинаться в начальной позиции произвольного пакета где-либо в буфере спектрограммы. В настоящем примере, заключительный участок первого пакета, обозначенный P1, загружается в позиции STS 1-20, и начальный участок второго пакета, обозначенный P2, загружается в позиции STS 21-100 для заполнения буфера спектрограммы. Начальная позиция 2160 пакета находится в STS 21. Таким образом, P2 включает в себя символы S1-S16, и P2 включает в себя символы S17-S20, содержащие данные из двух следующих друг за другом, но отдельных пакетов. Чтобы способствовать синхронизации описанного процесса, передатчик 130 (фиг. 1) можно оставлять неподвижным, чтобы содержание пакета, по существу, не изменялось от пакета к пакету, и содержимое буфера спектрограммы, по существу, представляло один пакет. Сигнал 122 данных, в целях настоящего примера, кодируется кодом прямого исправления ошибок. Хотя можно использовать любую подходящую форму кода прямого исправления ошибок, настоящий вариант осуществления использует код Рида-Соломона исправления ошибок, благодаря чему, по меньшей мере, один блок данных исправления ошибок сопровождает измеренные и другие данные, представляющие интерес. Таким образом, пакетные данные 2304, как часть структуры пакета, показанной на фиг. 30, могут представлять параметры ориентации, например, тангаж и крен, а также параметры, указывающие рабочее состояние передатчика 130 (фиг. 1), например, температуру, давление и состояние батареи. За пакетными данными следует общий блок данных исправления ошибок, который состоит из первого участка данных исправления ошибок RS 1, указанного ссылочной позицией 2308, и второго участка данных исправления ошибок RS 2, указанного ссылочной позицией 2310, благодаря чему общий блок данных исправления переходит от конца буфера спектрограммы обратно к его началу. Использование кода Рида-Соломона исправления ошибок позволяет исправлять конкретное количество ошибок для каждого пакета, в зависимости от размера блока данных исправления ошибок. В целях настоящего примера, код исправления ошибок позволяет осуществлять по два исправления на пакет, хотя можно использовать любую подходящую производительность исправления. Очевидно, что проиллюстрированная структура пакета не предполагает ограничения, и что можно использовать любую подходящую структуру пакета, не выходя за рамки изложенных здесь принципов.
Теперь обратимся к фиг. 31 совместно с фиг. 29. На первой показана блок-схема операций, демонстрирующая вариант осуществления процесса декодирования, в целом, указанного ссылочной позицией 2400, который можно применять как этап декодирования 2148, показанный на фиг. 29. Способ начинается с этапа 2404 и переходит к этапу 2408, на котором указатель STS устанавливается равным 1. Последний может увеличиваться или устанавливаться для указания любого значения индекса STS (1-100), показанного на фиг. 30. На этапе 2410, декодирование применяется, исходя из того, что указатель STS указывает на срез STS, который представляет срез в первом символе структуры пакета в целом. В частности, данные, которые используется процессом декодирования Рида-Соломона, начинаются с данных в STS 1 и использует каждый пятый последующий срез в буфере спектрограммы. Таким образом, для начального декодирования используются срезы 1, 6, 11, 16, 21, 26, 31, 36, 41, 46, 51, 56, 61, 66, 71, 76, 81, 86, 91 и 96. Таким образом, один срез из каждого из 20 символов в структуре пакета, в целом, участвует в попытке правильно декодировать то, что в дальнейшем может именоваться пакетом срезов. Каждый срез из пакета срезов берется из одной и той же позиции среза каждого символа. На этапе 2414, количество исправлений ошибок Рида-Соломона для попытки декодирования сравнивается с максимальной производительностью исправления кода исправления, которая в настоящем примере, предполагается равной 2. Если количество исправлений меньше или равно 2, операция переходит к этапу 2418 сохранения декодированных данных для пакета срезов. Затем операция переходит к этапу 2420. С другой стороны, если на этапе 2414 определено, что количество исправлений больше 2, операция переходит непосредственно к этапу 2420, на котором производится определение, установлен ли указатель STS на последнее значение индекса STS в буфере спектрограммы. Если нет, на этапе 2424 указатель STS увеличивается на 1, и операция возвращается к этапу 2410 декодирования RS. Соответственно, благодаря возвращению к этапу 2410, попытка декодирования RS производится, начиная с каждой позиции индекса STS в буфере спектрограммы. При каждом успешном декодировании, декодированные данные сохраняются на этапе 2418. На этапе 2414 сохраняется количество произведенных исправлений совместно с каждым успешно декодированным пакетом срезов, и пакеты срезов, которые не удалось декодировать, могут указываться как недекодируемые. В таблице 4, в порядке неограничительного примера, приведены результаты попыток декодирования для пакетов срезов 1-100. Были успешно декодированы пакеты срезов 21-25, а все остальные пакеты срезов были определены как недекодируемые.
Таблица 4
Согласно фиг. 30, очевидно, что срезы 21-25 соответствуют набору срезов, который связан с первым символом (S1) пакета. На этом основании, центр начального символа пакета был идентифицирован как соответствующий срезу 23. Хотя все пять пакетов срезов, начиная со срезов 21-25 символа S1, могли бы декодироваться без ошибок, очевидно, что ошибки могут вноситься, например, шумом. В таком случае один или более из срезов одного из этих пакетов срезов придется заполнять нулями при выполнении способа 2100, показанного на фиг. 29.
Возвращаясь к рассмотрению фиг. 31, после того, как на этапе 2420 обнаруживается последний индекс STS, операция переходит к этапу 2428 нахождения наилучшего индекса STS или пакета срезов на основании количества исправленных ошибок в таблице 1. В настоящем примере STS 23 идентифицируется как соответствующий центральной позиции начального символа пакета. Согласно варианту осуществления, данные, которые декодируется для пакета срезов, связанного с STS 23, можно рассматривать как наилучшие данные для пакета, поскольку каждый срез из пакета срезов начинается от центральной позиции каждого символа. В отношении процесса исправления, вероятность декодирования ошибочных данных (т.е. неверного исправления данных) при использовании описанного процесса очень низка. Конечно, вероятность неверного декодирования или извлечения данных уменьшается пропорционально производительности исправления кода прямого исправления ошибок. Чаще всего, процесс либо успешно декодирует пакет срезов, извлекая верные данные, либо идентифицирует пакет срезов как недекодируемый. Недекодируемые пакеты срезов могут быть обусловлены, например, всплесками шумов, в результате чего, значительное количество срезов в пакете срезов заполняются нулями. На этапе 2430, способ проверяет, превышает ли длина серии для текущего пакета порог длины серии. Последний можно задать равным количеству срезов на символ. В условиях высокого отношения сигнал-шум (низкого внешнего шума), количество успешно декодированных пакетов срезов должно совпадать, но не превышать количество срезов на символ. В настоящем примере, если более пяти пакетов срезов успешно декодировано для пакета, высока вероятность того, что один из пакетов срезов был декодирован неверно, поскольку этот пакет срезов по природе своей начинается в символе, который не является первым символом пакета. Если длина серии превышает порог длины серии, пакет идентифицируется как недекодируемый на этапе 2436. Если длина серии не превышает порог длины серии, декодированные данные сохраняется и/или переносится для использования другими процессами на этапе 2438. Данные могут включать в себя, в порядке неограничительного примера, тангаж, крен, состояние батареи, температуру и давление. На этапе 2440, указатель STS устанавливается на начальную позицию для декодирования буфера 2044 спектрограммы. В одном варианте осуществления на основании примера, приведенного на фиг. 30 и в таблице 1, начальная позиция может быть STS 21, первым срезом пакета). В другом варианте осуществления, начальная позиция может быть STS 23, центральным срезом первого символа пакета. В еще одном варианте осуществления, когда данный символ в буфере спектрограммы идентифицирован как первый символ пакета, последующее декодирование, по меньшей мере, первоначально, может ограничиваться декодированием набора пакетов срезов, который связан с данным символом.
Согласно фиг. 9 и 30, согласно варианту осуществления, приемник 20 может быть выполнен с возможностью приема сигнала 122 данных, характеризуемого синфазной компонентой I и квадратурной компонентой Q. На этом основании, буфер 2044 спектрограммы может быть выполнен с возможностью сохранения двух наборов величин для частот символа каждого STS. Один набор величин представляет синфазные компоненты, и другой набор величин представляет квадратурные компоненты. Иными словами, величины, связанные с каждым временным срезом, сохраняются в комплексном формате. Хотя это не требуется, заявители обнаружили процесс, полезный для определения средней величины каждой частоты символа. Сначала синфазная компонента I, подверженная шуму, для каждой частоты символа в срезе усредняется отдельно от квадратурной компоненты Q, подверженной шуму, каждой частоты символа в срезе. Затем два средних значения суммируются. После этого из суммы извлекается квадратный корень. Этот процесс можно выразить уравнение (5), следующим образом:

В этом уравнении, n - количество выборок каждой частоты символа, i - значение индекса, Ii представляет набор синфазных величин частот символа, и Qi представляет набор квадратурных величин частот символа. Используя этот метод, заявители установили, что вкладам шума, измеренным как часть синфазных и квадратурных компонент, свойственно гасить друг друга. Напротив, традиционный процесс характеризуется в виде:

Заявители утверждают, что, поскольку значения Ii и Qi подвержены шуму, среднее значение, вычисляемое согласно уравнению (6) имеет тенденцию очищать шум и ошибочно добавлять шум в полученное среднее значение. Благодаря использованию уравнения (5), определенные средние значения более точно отслеживают фактический внешний шум и интенсивность сигнала принятых символов.
На основании фиг. 28-31, а также уравнения (5), очевидно, что заявители придумали и реализовали процесс кодирования/декодирования, отличающийся высокой надежностью, и не требует использования символа или символов синхронизации, или синхробитов в самом пакете. Благодаря избавлению от необходимости в синхросимволах или битах в составе структуры пакета, доступная полоса для передачи данных увеличивается. Процесс дополнительно демонстрирует помехоустойчивость, которая предполагается ранее неизвестной в области горизонтального направленного бурения и соответствующих подземных работ.
Вышеприведенное описание изобретения представлено в целях иллюстрации и описания. Оно не притязает на полноту или ограничение изобретения конкретными раскрытыми формами, и другие модификации и изменения возможны в свете вышеизложенных принципов. Соответственно, специалистам в данном уровне техники будут понятны некоторые модификации, перестановки, добавления и подкомбинации вышеописанных вариантов осуществления.
Все описанные здесь элементы, части и этапы предпочтительно включены. Следует понимать, что любой из этих элементов, частей и этапы можно заменять другими элементами, частями и этапами или вовсе удалять, что очевидно специалистам в данной области техники.
В целом, здесь раскрыта, по меньшей мере, система. Система включает в себя передатчик для использования совместно с системой горизонтального направленного бурения, которая передает поток многобитовых символов, который характеризует символы датчика для приема наземным портативным устройством. Портативное устройство принимает поток символов для наземного извлечения сигналов датчиков. Передатчик может точно размещать частоты символа, по меньшей мере, чтобы избегать зашумленной среды, а также, чтобы избегать гармоник электропитания, и может использовать формирование волны для передаваемых символов, по меньшей мере, для обеспечения управления мощностью передачи, управления спектральным составом и согласования широкополосной антенны. Приемник может измерять зашумленную среду для идентификации частот символа, используемых передатчиком. Шум можно сканировать с увеличивающимся разрешением в широкой полосе частот для отображения или автоматического выбора частоты символа.
Принципы
Ниже раскрыты, по меньшей мере, следующие принципы.
Принцип 1. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков; и
компоновку антенных возбудителей для электрического возбуждения упомянутой антенны для излучения дипольного сигнала определения местоположения, в качестве сигнала глубины, для наземного приема, по меньшей мере, для использования при определении глубины подземного оборудования и для электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
Принцип 2. Передатчик по принципу 1, в котором упомянутая компоновка антенных возбудителей включает в себя первый возбудитель для электрического возбуждения антенны для излучения сигнала глубины и второй антенный возбудитель для электрического возбуждения антенны для излучения потока электромагнитных символов.
Принцип 3. Передатчик по принципу 1, в котором поток многобитовых символов включает в себя, по меньшей мере, четыре разных символа, таким образом, что каждый символ представляет, по меньшей мере, два бита.
Принцип 4. Передатчик по принципу 3, в котором каждый из символов передается на частоте символа, которая является немодулированной, таким образом, что разные символы передаются на разных частотах символа.
Принцип 5. Передатчик по принципу 4, в котором упомянутый процессор выполнен с возможностью передачи каждой из частот символа на указанном уровне мощности на основании выделения мощности таким образом, что одна из частот символа передается на первом уровне мощности, который отличается от второго уровня мощности для, по меньшей мере, одной другой частоты символа.
Принцип 6. Передатчик по любому из принципов 1-5, дополнительно содержащий:
прямой цифровой синтезатор, выполненный с возможностью генерации частоты каждого многобитового символа.
Принцип 7. Передатчик по принципу 6, в котором прямой цифровой синтезатор включает в себя первый канал, предназначенный для генерирования сигнала глубины для дополнительного возбуждения антенны для излучения дипольного сигнала определения местоположения, и второй канал, предназначенный для генерирования потока многобитовых символов.
Принцип 8. Передатчик по принципу 7, в котором сигнал глубины непрерывно передается на фиксированной частоте сигнала глубины, независимо от потока электромагнитных символов.
Принцип 9. Передатчик по любому из принципов 6-8, в котором прямой цифровой синтезатор выполнен с возможностью генерации частот символа в широкой полосе частот, и прямой цифровой синтезатор выполнен с возможностью ограничения частот символа узкой полосой, которая меньше широкой полосы частот и, по меньшей мере, приблизительно согласована с упомянутой антенной.
Принцип 10. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
прямой цифровой синтезатор, выполненный с возможностью генерирования потока символов, образованного множеством символов фиксированной частоты, и прямой цифровой синтезатор выполнен с возможностью формирования некоторой формы волны возбуждения для разных частот символа; и
антенный возбудитель для электрического возбуждения антенны на основании потока символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
Принцип 11. Передатчик по принципу 10, в котором прямой цифровой синтезатор выполнен с возможностью передачи в широкой полосе частот в ответ на сигналы датчиков таким образом, что, по меньшей мере, участок широкой полосы частот рассогласуется с антенной, и формирования некоторой формы волны, по меньшей мере, для управления энергопотреблением передатчика, связанным с разными частотами символа, чтобы энергопотребление передатчика не изменялось в широкой полосе частот по сравнению с постоянными напряжением и формой волны возбуждения.
Принцип 12. Передатчик по принципу 11, в котором широкая полоса частот составляет, по меньшей мере, приблизительно, от 9 кГц до 45 кГц.
Принцип 13. Передатчик по любому из принципов 10-12, в котором прямой цифровой синтезатор включает в себя набор поисковых таблиц, задающий соответствующий набор форм волны, которые охватывают широкую полосу частот, и разные частоты символа конкретно устанавливаются на основании форм волны ряда поисковых таблиц.
Принцип 14. Передатчик по принципу 13, в котором формы волны из набора форм волны изменяются в соответствии с увеличением частоты от синусоидальной формы к ступенчатой форме на конкретной частоте в широкой полосе частот.
Принцип 15. Передатчик по принципу 14, в котором формы волны самой верхней группы выше конкретной частоты изменяют свою форму от импульсовидной до прямоугольной волны с увеличением частоты.
Принцип 16. Передатчик по любому из принципов 10-15, в котором упомянутый прямой цифровой синтезатор включает в себя формирователь для постепенного доведения величины каждого символа к началу и концу до нулевой величины для ограничения спектрального расширения символов.
Принцип 17. Передатчик по любому из принципов 10-16, в котором прямой цифровой синтезатор включает в себя приращение частоты для генерирования разных частот символа во всей полосе передатчика, таким образом, что одна из частот символа может располагаться посередине между любыми данными соседними гармониками электропитания частоты электропитания 50 Гц и 60 Гц.
Принцип 18. Передатчик по принципу 17, в котором каждая частота символа включает в себя спектр, основной пик которого попадает между данными соседними гармониками электропитания, и спектр демонстрирует нуль на каждой частоте гармоники электропитания данной одной из частот электропитания 50 Гц и 60 Гц.
Принцип 19. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков; и
компоновку антенных возбудителей для электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов, по меньшей мере, для наземного извлечения сигналов датчиков.
Принцип 20. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема сигнала передатчика в качестве потока многобитовых символов, который, по меньшей мере, характеризует набор информации датчика, относящейся к работе передатчика в ходе подземных работ для извлечения набора информации датчика.
Принцип 21. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от упомянутого передатчика для формирования потока многобитовых символов на основании набора частот символа, причем каждый из многобитовых символов соответствует одной из частот символа, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, и (ii) принимать поток многобитовых символов от передатчика в ходе подземных работ для извлечения информации датчика.
Принцип 22. Портативное устройство по принципу 21, в котором приемник выполнен с возможностью автоматически выбирать набор частот символа.
Принцип 23. Портативное устройство по принципу 21 или 22, в котором упомянутый приемник выполнен с возможностью идентифицировать, по меньшей мере, четыре частоты символа в упомянутом наборе.
Принцип 24. Портативное устройство по любому из принципов 21-23, дополнительно содержащее:
компоновку связи для переноса идентифицированных частот символа на упомянутый передатчик, чтобы передатчик после этого осуществлял передачу на идентифицированных частотах символа.
Принцип 25. Портативное устройство по любому из принципов 21-24, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот на каждом фиксированном шаге увеличения частоты.
Принцип 26. Портативное устройство по принципу 25, в котором фиксированный шаг увеличения частоты устанавливается в соответствии с разрешением по частоте символа упомянутого передатчика, которое задает минимальное разнесение по частоте между разными частотами символа.
Принцип 27. Портативное устройство по принципу 25 или 26, в котором фиксированный шаг увеличения частоты равен 5 Гц.
Принцип 28. Портативное устройство по любому из принципов 25-27, в котором полоса частот охватывает множество подполос, благодаря чему передатчик ограничивается передачей частот символа в конкретной одной из упомянутых подполос, и приемник выполнен с возможностью идентифицировать упомянутый набор частот символа в каждой подполосе.
Принцип 29. Портативное устройство по принципу 28, в котором упомянутый приемник выполнен с возможностью определения среднего шума в расчете на подполосу на основании набора частот символа, идентифицированного для каждой подполосы.
Принцип 30. Портативное устройство по принципу 28 или 29, дополнительно содержащее:
дисплей для отображения среднего шума в расчете на подполосу.
Принцип 31. Портативное устройство по принципу 25, в котором полоса частот охватывает множество подполос, и приемник выполнен с возможностью изменения оператором набора частот символа, по меньшей мере, в выбранной подполосе.
Принцип 32. Портативное устройство по принципу 28, дополнительно содержащее:
дисплей, который выполнен с возможностью отображения, по меньшей мере, одного статистического значения шума для каждой подполосы в режиме выбора частоты и активного обновления отображения для каждой подполосы на основании ряда обновлений статистического значения.
Принцип 33. Портативное устройство по принципам 31 или 32, в котором упомянутое изменение, совершаемое оператором, включает в себя перемещение, по меньшей мере, одной частоты символа из набора частот символа из выбранной подполосы в другую подполосу.
Принцип 34. Портативное устройство по любому из принципов 31-33, включающее в себя дисплей для отображения, по меньшей мере, выбранной подполосы и для увеличения масштаба детализации на выбранной подполосе.
Принцип 35. Портативное устройство по принципу 21, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот на каждом фиксированном шаге увеличения частоты.
Принцип 36. Портативное устройство по любому из принципов 25-27, в котором упомянутый приемник выполнен с возможностью характеризовать шум в наборе подполос частот, которые охватывают полосу частот, и рекомендовать выбранную одну из подполос частот для передачи частот символа на основании, по меньшей мере, одного статистического значения шума, соответствующего рекомендованной подполосе частот, по сравнению со статистическим значением шума, соответствующим другим подполосам.
Принцип 37. Портативное устройство по принципу 36, в котором статистическое значение является, по меньшей мере, одним из пикового шума, минимального шума и среднеквадратического отклонения.
Принцип 38. Портативное устройство по принципу 36 или 37, в котором приемник рекомендует выбранную подполосу на основании множества статистических значений шума, включающих в себя средний шум совместно с, по меньшей мере, одним из пикового шума, минимального шума и среднеквадратического отклонения.
Принцип 39. Портативное устройство по любому из принципов 25-38, в котором каждое измерение шума в наборе измерений шума характеризует шум как векторную сумму для установления трехмерного значения шума.
Принцип 40. Портативное устройство по любому из принципов 25-38, выполненное с возможностью выборочного отображения шума для каждого измерения шума вдоль единственной оси приема.
Принцип 41. Портативное устройство по принципу 21, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот при каждом фиксированном приращении частоты, и упомянутый приемник выбирает набор частот символа на основании, по меньшей мере, одного из среднего шума, среднеквадратического отклонения и пикового шума в наборе измерений шума.
Принцип 42. Портативное устройство по принципу 41, в котором упомянутый приемник выполнен с возможностью применения запрещенного интервала с центром в каждой частоте символа для исключения любой частоты символа, для которой пик шума попадает в запрещенный интервал при другом фиксированном приращении частоты и нарушает порог шума.
Принцип 43. Портативное устройство по любому из принципов 21-42, в котором упомянутый передатчик передает каждую частоту символа со спектром частот символа, и упомянутый приемник выполнен с возможностью приема каждой частоты символа, причем характеристика приемника согласована со спектром частот символа.
Принцип 44. Портативное устройство по принципу 43, в котором каждый спектр частот символа включает в себя нуль на каждой частоте гармоники электропитания данной частоты электропитания, и характеристика приемника демонстрирует соответствующий нуль на каждой частоте гармоники электропитания данной одной из частот электропитания 50 Гц и 60 Гц таким образом, что электромагнитный шум на частотах гармоник электропитания подавляется приемником.
Принцип 45. Портативное устройство по любому из принципов 21-44, в котором упомянутый приемник выполнен с возможностью, по меньшей мере, определения глубины передатчика в ходе подземных работ на основании приема частот символа.
Принцип 46. Портативное устройство по любому из принципов 21-44, в котором приемник выполнен с возможностью, по меньшей мере, определения глубины передатчика в ходе подземных работ на основании сигнала глубины, который передается передатчиком независимо от частот символа.
Принцип 47. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от упомянутого передатчика, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, (ii) принимать частоты символа от передатчика в ходе подземных работ для извлечения информации датчика и (iii) выделять передаваемую мощность каждой из частот символа.
Принцип 48. Портативное устройство по принципу 47, дополнительно содержащее:
компоновку связи для переноса передаваемой мощности, выделяемой каждой частоте символа, на упомянутый передатчик, чтобы передатчик после этого осуществлял передачу на выделенной передаваемой мощности для каждой частоты символа.
Принцип 49. Портативное устройство по принципу 47 или 48, в котором упомянутый приемник выполнен с возможностью перевыделения мощности передачи передатчика между частотами символа в оперативном режиме для изменения мощностей передачи, выделяемых частотам символа в ходе работы передатчика.
Принцип 50. Портативное устройство по принципу 47 или 48, в котором упомянутый приемник выполнен с возможностью выделения мощности передачи передатчика между частотами символа на основании скользящего среднего интенсивности сигнала каждой частоты символа.
Принцип 51. Портативное устройство по принципу 47 или 48, в котором упомянутый приемник выполнен с возможностью неравномерного выделения мощности передачи передатчика частотам символа таким образом, чтобы, по меньшей мере, приблизительно поддерживать целевое энергопотребление для передатчика.
Принцип 52. Портативное устройство по принципу 47 или 48, в котором упомянутый процессор выполнен с возможностью выделения мощности передачи передатчика частотам символа для снижения общего энергопотребления передатчика, по меньшей мере, по сравнению с передачей всех частот символа на одинаковой мощности.
Принцип 53. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема от передатчика структуры пакета, которая образована множеством многобитовых символов в потоке символов, включающем в себя, по меньшей мере, одну группу многобитовых символов, характеризующих информацию датчика как пакетные данные, и, по меньшей мере, еще одну группу многобитовых символов, выступающую в роли блока данных исправления ошибок, причем упомянутые пакетные данные характеризуют набор информации датчика, относящейся к работе передатчика в ходе подземных работ;
блок расслоения для приема каждого многобитового символа как множества срезов символа, которые разнесены по времени, и при этом каждый срез символа включает в себя набор величин частоты символа, включающий в себя величину для каждой частоты символа;
буфер спектрограммы, имеющий длину, образованную последовательностью позиций срезов, причем в каждой из позиций срезов может храниться, по меньшей мере, один набор упомянутых величин частоты символа, и длины буфера спектрограммы достаточно для хранения суммарного количества срезов символа, соответствующего продолжительности времени структуры пакета;
переключатель временных срезов для маршрутизации срезов символа в позиции срезов буфера спектрограммы для последовательного и выборочного сохранения набора величин частоты символа, связанных с каждым последовательным срезом символа; и
декодер, выполненный с возможностью обнаружения, в порядке извлечения пакетных данных, начального символа структуры пакета в буфере спектрограммы на основании блока данных исправления ошибок.
Принцип 54. Портативное устройство по принципу 53, дополнительно содержащее:
детектор порога для приведения в действие переключателя временных срезов для исключения дальнейшей загрузки величин частоты символа любого данного среза символа, подверженного всплеску шумов, на основании порога шума в данную одну из позиций срезов буфера спектрограммы.
Принцип 55. Портативное устройство по принципу 54, в котором детектор порога выполнен с возможностью загрузки нулей в данную позицию среза символа в буфере спектрограммы.
Принцип 56. Портативное устройство по принципу 53 или 54, в котором упомянутый декодер выполнен с возможностью извлечения пакетных данных без символа синхронизации как части структуры пакета.
Принцип 57. Портативное устройство по любому из принципов 53-56, в котором каждый символ характеризуется n срезами символа в буфере спектрограммы, и упомянутый декодер выполнен с возможностью инициирования попытки декодирования, начиная с каждой позиции среза в буфере спектрограммы, и регистрации количества исправленных ошибок для каждой позиции среза, причем каждая попытка декодирования основывается на пакете срезов, начинающегося с данной позиции среза совместно с каждой n-ой позицией среза от данной позиции среза в длине буфера спектрограммы, таким образом, что количество исправленных ошибок для каждого пакета срезов указывает позицию начального символа в буфере спектрограммы.
Принцип 58. Портативное устройство по любому из принципов 53-57, в котором упомянутый буфер спектрограммы выполнен с возможностью хранения набора величин частоты символа для каждого временного среза в формате комплексных чисел.
Принцип 59. Система для использования в горизонтальном направленном бурении, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутая система содержит:
передатчик, поддерживаемый подземным оборудованием, включающий в себя
антенну,
один или более датчиков для генерирования одного или более сигналов датчиков,
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков, и
антенный возбудитель для электрического возбуждения антенны для излучения потока электромагнитных символов на основании потока многобитовых символов; и
портативное устройство, включающее в себя
приемник, выполненный с возможностью приема потока многобитовых символов в нормальном режиме в ходе подземных работ для извлечения набора информации датчика в условиях электромагнитного шума.
Принцип 60. Система по принципу 59, в которой упомянутый приемник выполнен с возможностью, в режиме выбора частоты, измерять электромагнитный шум, отклонять передачу упомянутого потока электромагнитных символов, и идентифицировать набор частот символа на основании измеренного электромагнитного шума для последующей передачи от упомянутого передатчика для формирования потока многобитовых символов на основании набора частот символа, причем каждый из многобитовых символов соответствует одной из частот символа.
Принцип 61. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
модулятор для генерирования, по меньшей мере, одной модулированной частоты данных на несущей частоте на основании сигналов датчиков;
генератор тонов глубины для создания частоты немодулированного тона глубины, которая в двадцать или более раз меньше несущей частоты; и
антенный возбудитель для электрического возбуждения, по меньшей мере, одной антенны для излучения частоты тона глубины и несущей частоты для наземной регистрации частоты тона глубины и для извлечения сигналов датчиков из модулированных частот данных.
Принцип 62. Передатчик по принципу 61, в котором упомянутая частота тона глубины меньше или равна 1,5 кГц.
Принцип 63. Передатчик по принципу 62, в котором единственная несущая частота находится в диапазоне от 30 кГц до 45 кГц, включительно.
Принцип 64. Передатчик по любому из принципов 61-63, дополнительно содержащий:
прямой цифровой синтезатор, включающий в себя первый канал, выступающий в роли генератора тонов глубины для генерации частоты тона глубины, и второй канал, который генерирует единственную несущую частоту.
Принцип 65. Портативное устройство для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, и подземное оборудование поддерживает передатчик, который передает электромагнитный сигнал, регистрируемый портативным устройством, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутое портативное устройство содержит:
приемник для регистрации сигнала, когда передатчик находится над землей в первом рабочем режиме, и под поверхностью земли во втором рабочем режиме; и
процессор, выполненный с возможностью работы по выбору в (i) упомянутом первом режиме для определения наземного расстояния от портативного устройства до передатчика на основании измеренной на земле интенсивности сигнала упомянутого электромагнитного сигнала и компенсации поверхностного эффекта, и (ii) в упомянутом втором режиме, когда передатчик находится под землей, для определения глубины передатчика под поверхностью на основании измеренной под землей интенсивности сигнала упомянутого электромагнитного сигнала.
Принцип 66. Портативное устройство по принципу 65, в котором упомянутый второй режим позволяет устанавливать определенную глубину без применения какой-либо компенсации.
Принцип 67. Портативное устройство по принципу 65 или 66, в котором второй режим позволяет применять форму компенсации, отличную от компенсации поверхностного эффекта, к определенной глубине для установления скомпенсированной глубины под землей.
Принцип 68. Портативное устройство по принципу 67, в котором формой компенсации является компенсация скин-эффекта.
Принцип 69. Портативное устройство по любому из принципов 65-68, в котором компенсация поверхностного эффекта определяется на основании, по меньшей мере, приблизительно, куба определенного наземного расстояния для установления расстояния с компенсацией поверхностного эффекта.
Принцип 70. Портативное устройство по принципу 69, в котором компенсация поверхностного эффекта определяется дополнительно на основании калибровочной постоянной.
Принцип 71. Портативное устройство по любому из принципов 65-70, в котором наземное расстояние с компенсацией поверхностного эффекта (AGRCOMP) определяется как:

где dss - наземное расстояние от портативного устройства до передатчика, причем передатчик находится над поверхностью земли, на основании измеренной на земле интенсивности сигнала упомянутого сигнала и k - калибровочная постоянная.
Принцип 72. Портативное устройство по принципу 71, в котором k определяется на основании известного наземного расстояния между портативным устройством и передатчиком и значения dss, которое определяется на известном наземном расстоянии.
Принцип 73. Система для использования в горизонтальном направленном бурении, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутая система содержит:
передатчик, который включает в себя один или более датчиков для измерения одного или более рабочих параметров, характеризующих состояние подземного оборудования, причем такой передатчик передает на двух или более частотах, причем, по меньшей мере, одна из таких частот сама представляет множественные биты данных, характеризующие упомянутое состояние подземного оборудования независимо от какой-либо модуляции таких частот; и
портативное устройство, включающее в себя
приемник, выполненный с возможностью приема двух или более частот, и
процессор, выполненный с возможностью извлечения упомянутого состояния подземного оборудования из двух или более частот.
Принцип 74. Система по принципу 73, в которой упомянутое портативное устройство выполнено с возможностью, в режиме выбора частоты, измерять электромагнитный шум, отклонять передачу упомянутых частот и идентифицировать частоты на основании измеренного электромагнитного шума для последующей передачи от упомянутого передатчика в качестве упомянутых двух или более частот.
Принцип 75. Система по принципу 73 или 74, в которой каждая частота представляет два или более битов.
Принцип 76. Система по принципу 75, в которой каждая частота является немодулированной.
Принцип 77. Передатчик для использования в горизонтальном направленном бурении, который включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для измерения одного или более рабочих параметров, характеризующих состояние подземного оборудования;
антенный возбудитель для возбуждения антенны для передачи на двух или более частотах, причем, по меньшей мере, одна из таких частот сама представляет множественные биты данных, характеризующие упомянутое состояние подземного оборудования независимо от какой-либо модуляции таких частот для наземного приема для извлечения состояния подземного оборудования.
Принцип 78. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема двух или более частот сигнала передатчика, причем, по меньшей мере, одна из частот сама представляет множественные биты данных, характеризующие состояние подземного оборудования независимо от какой-либо модуляции; и
процессор, выполненный с возможностью извлечения состояния подземного оборудования из двух или более частот.
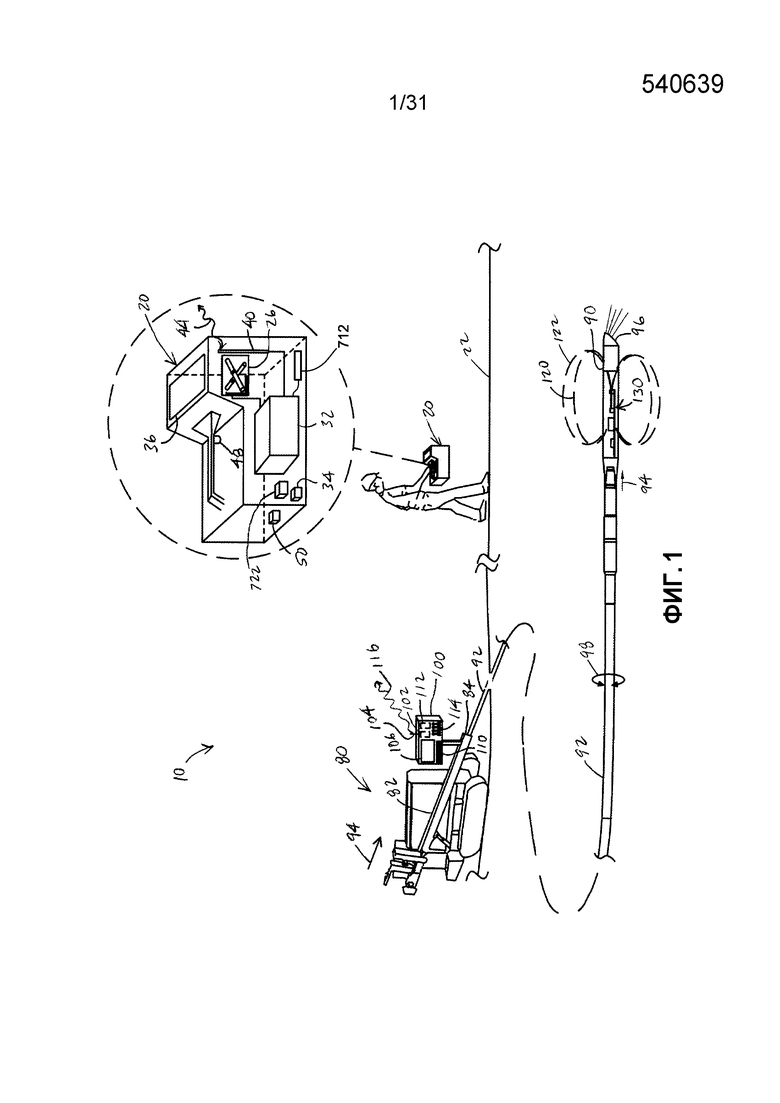
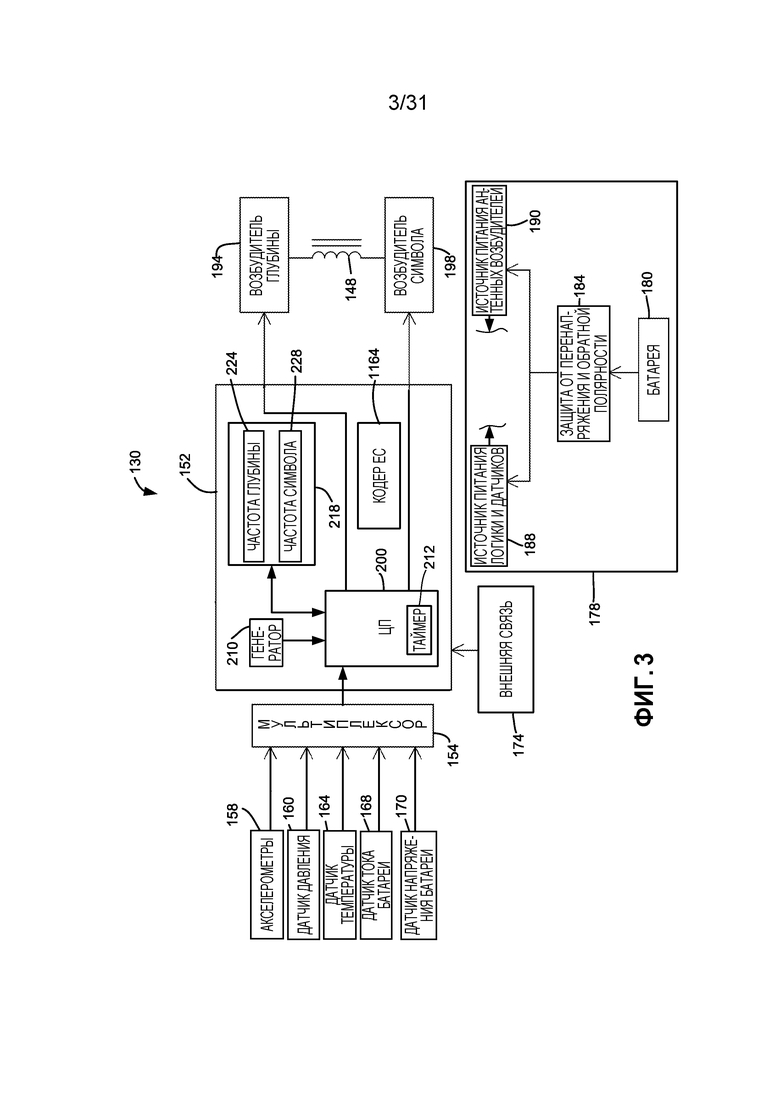
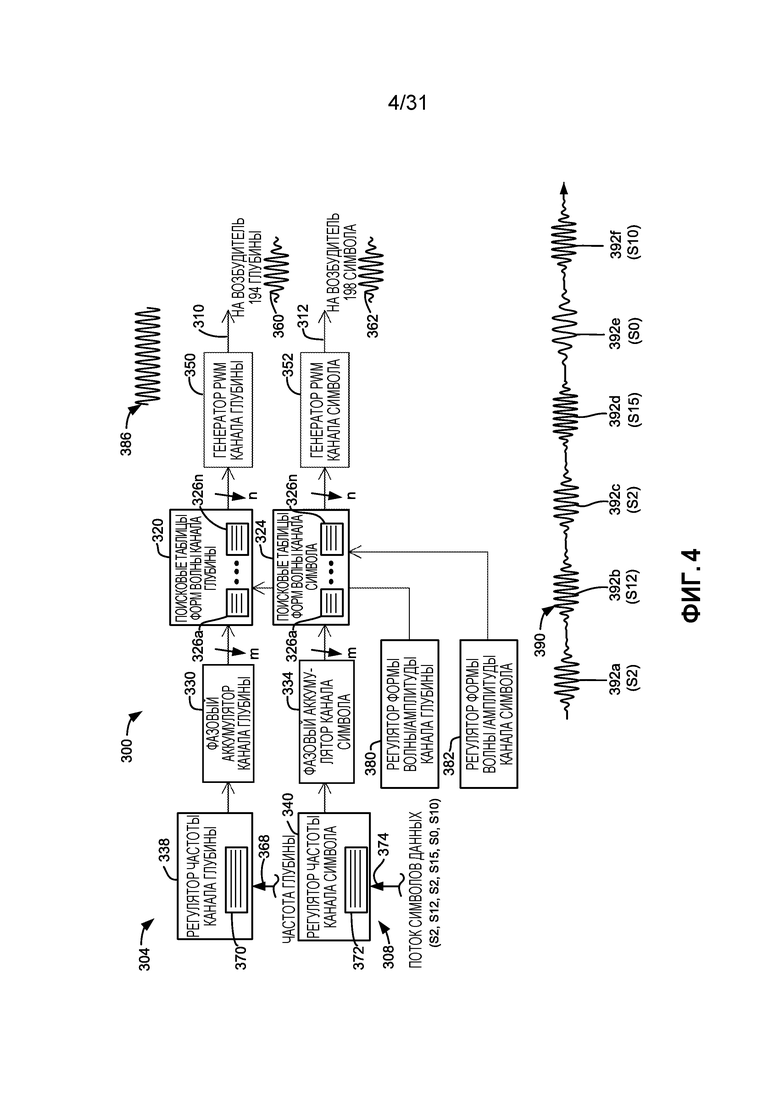
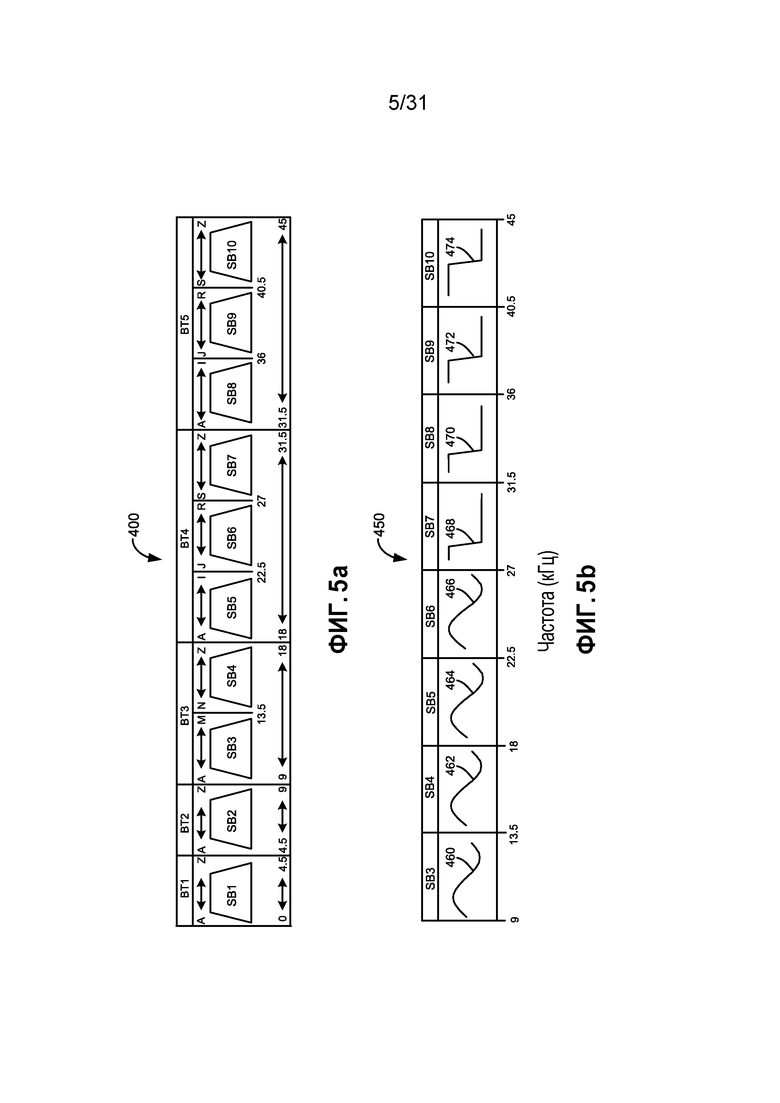
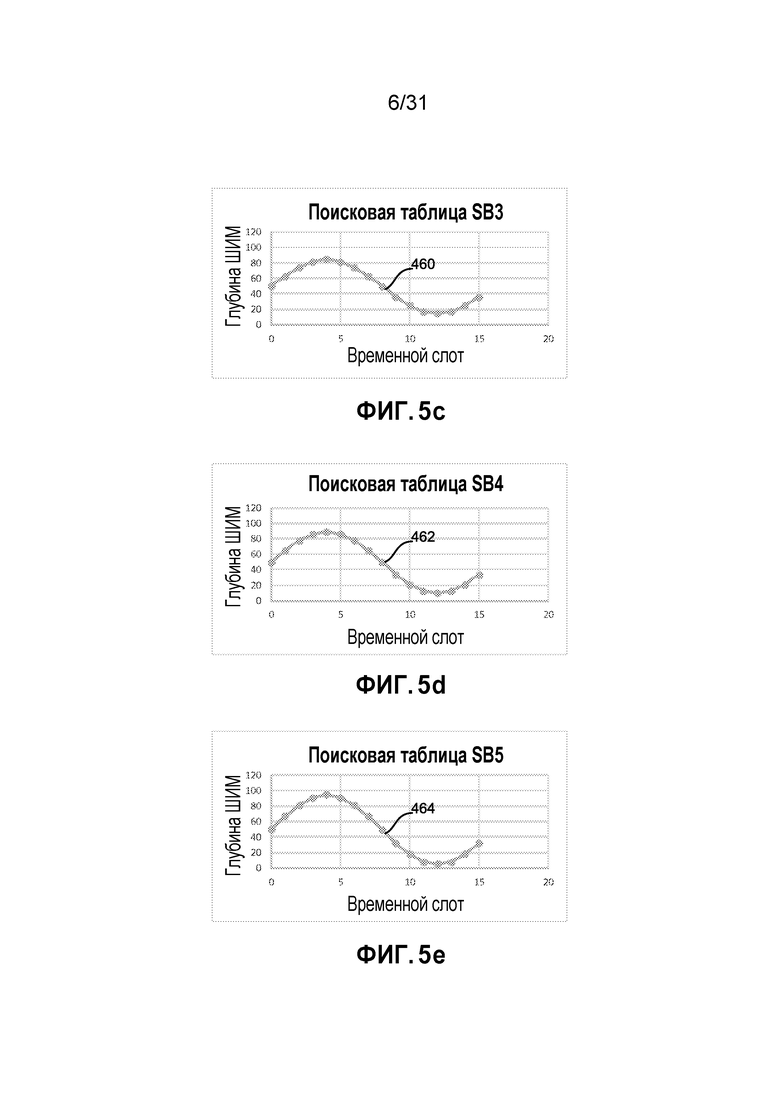
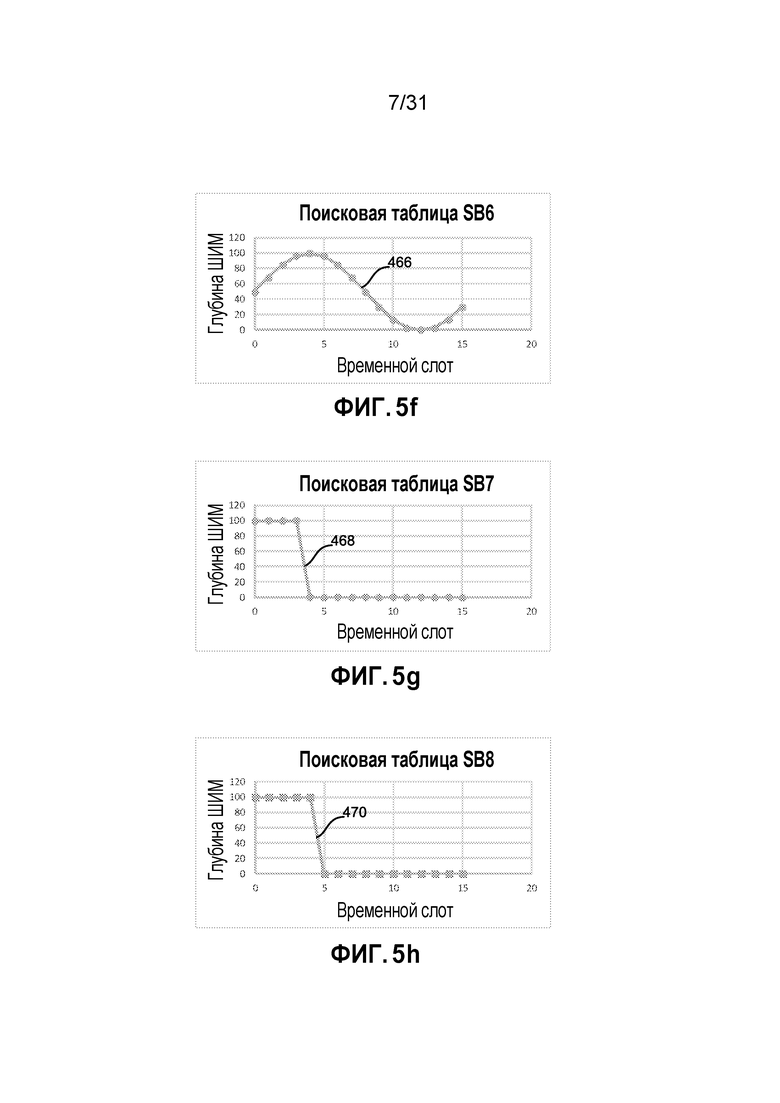
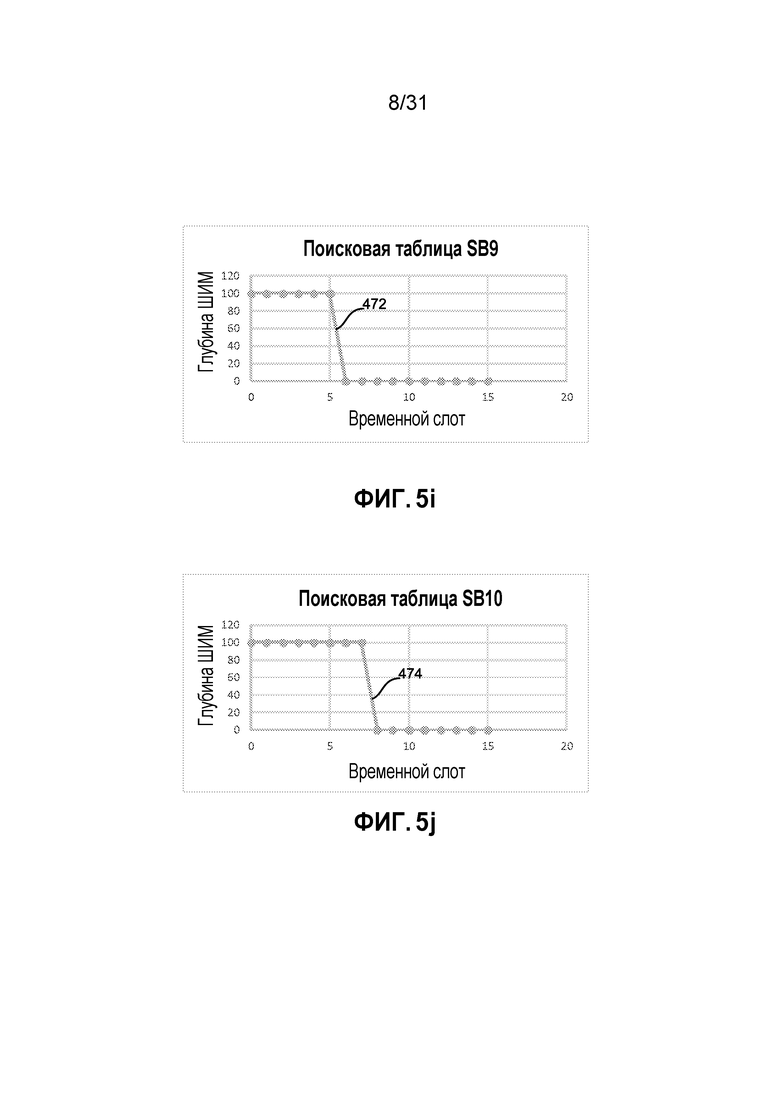
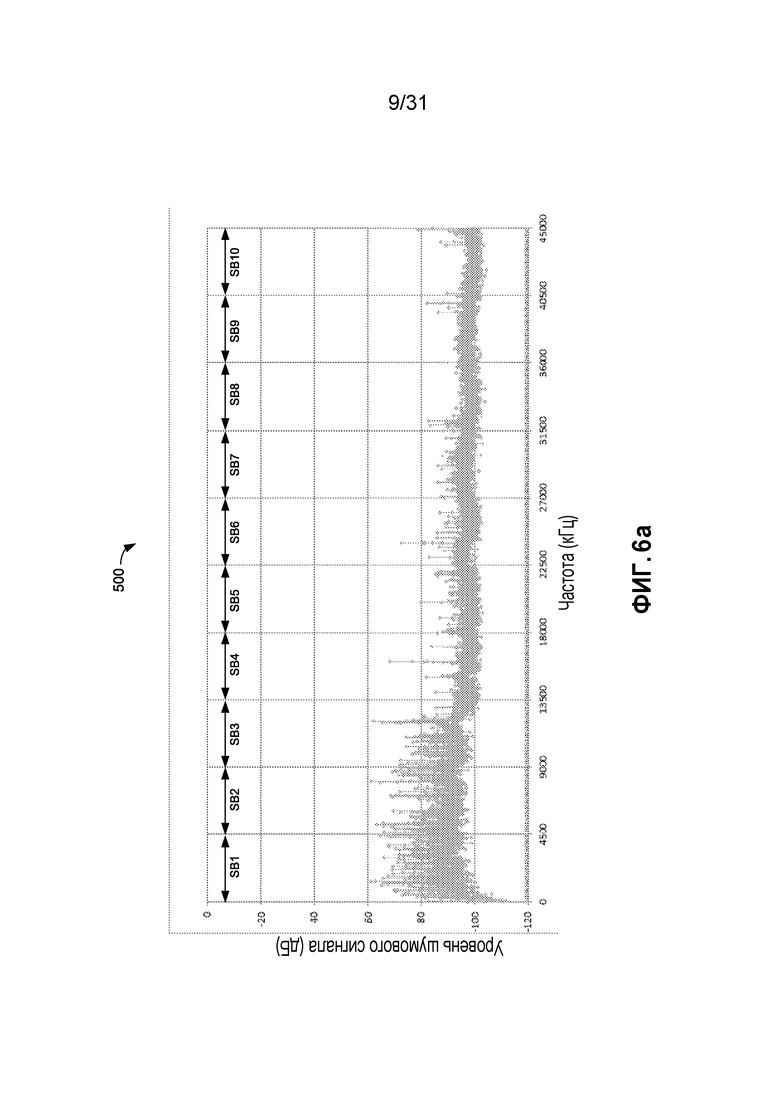
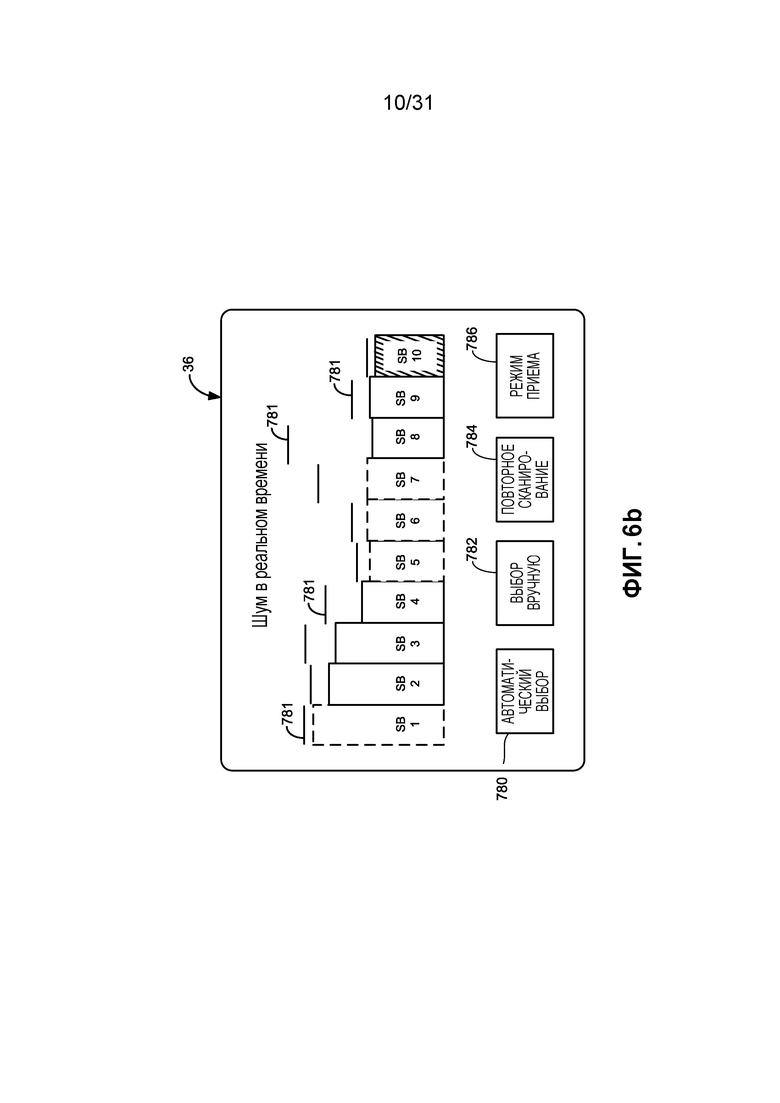
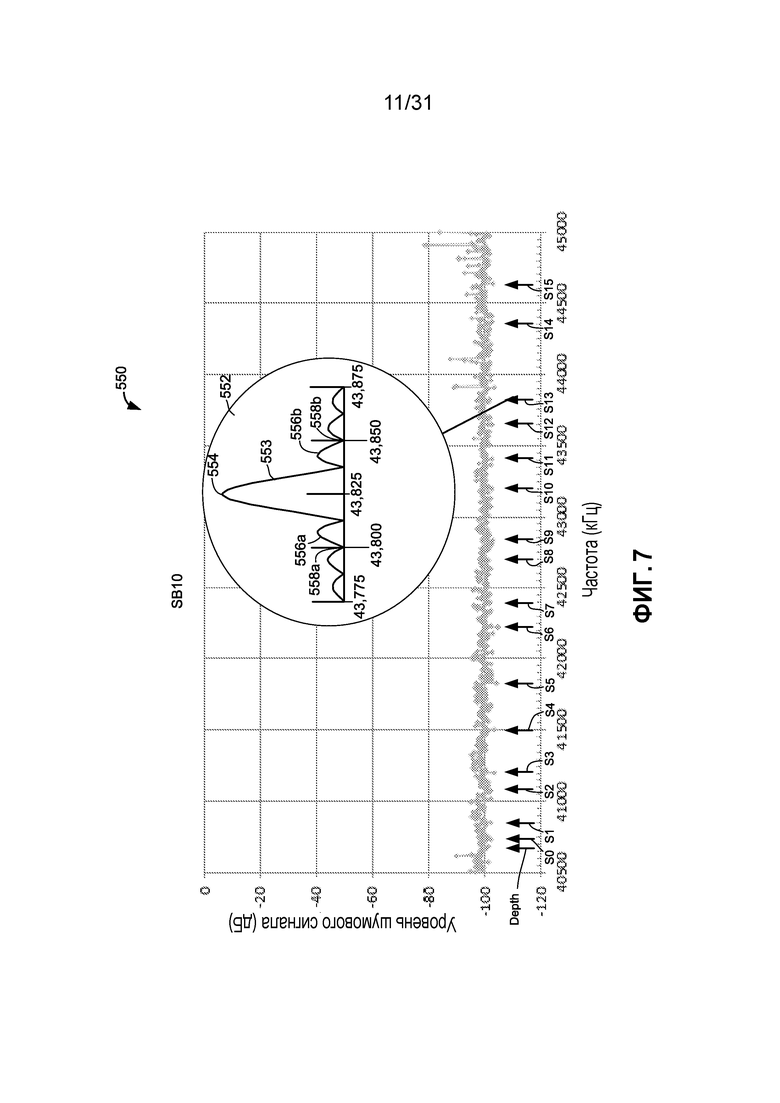
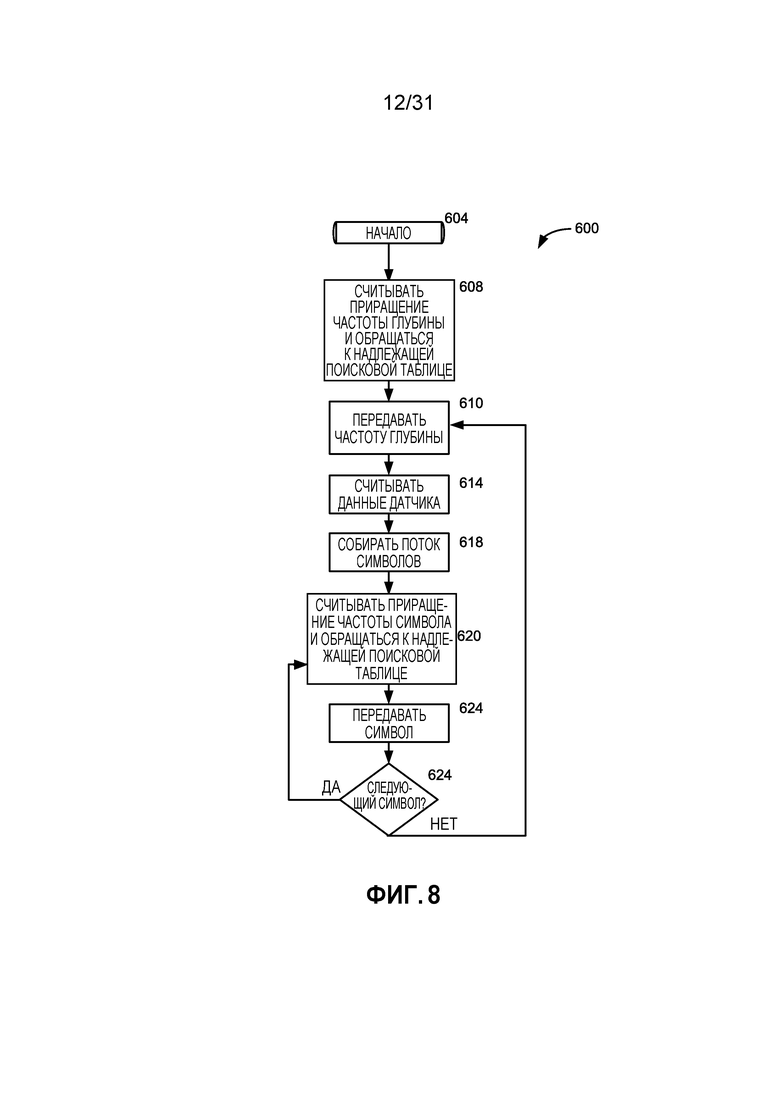
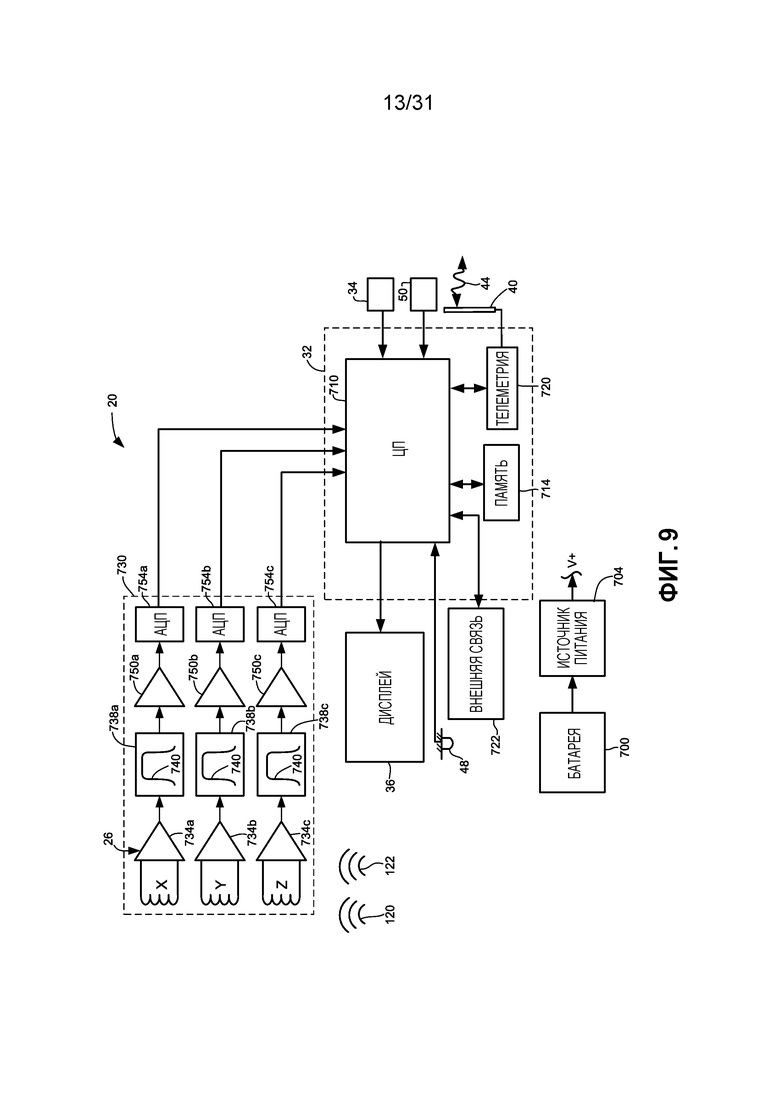
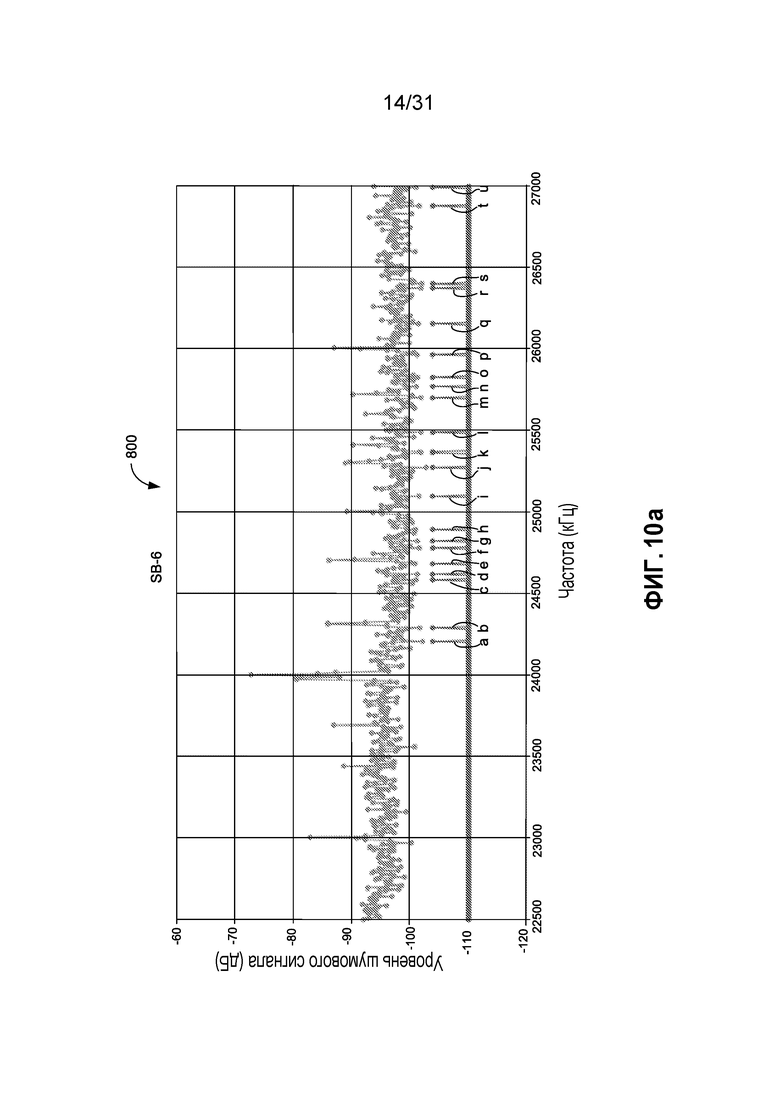
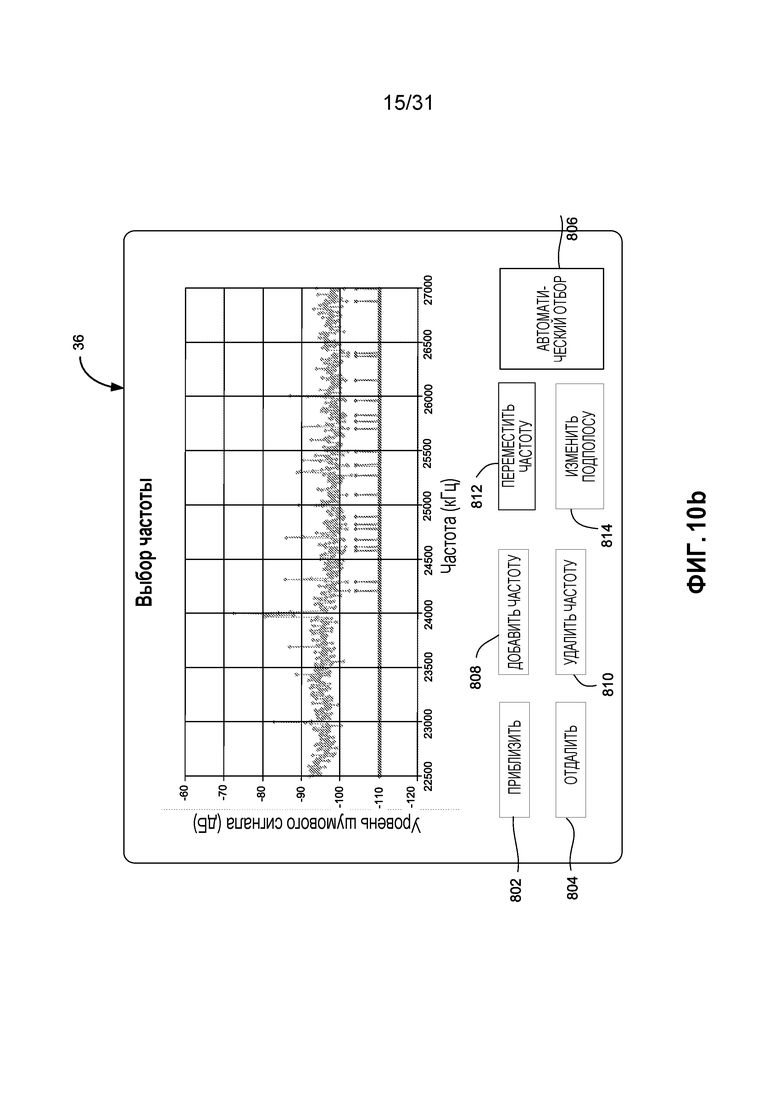
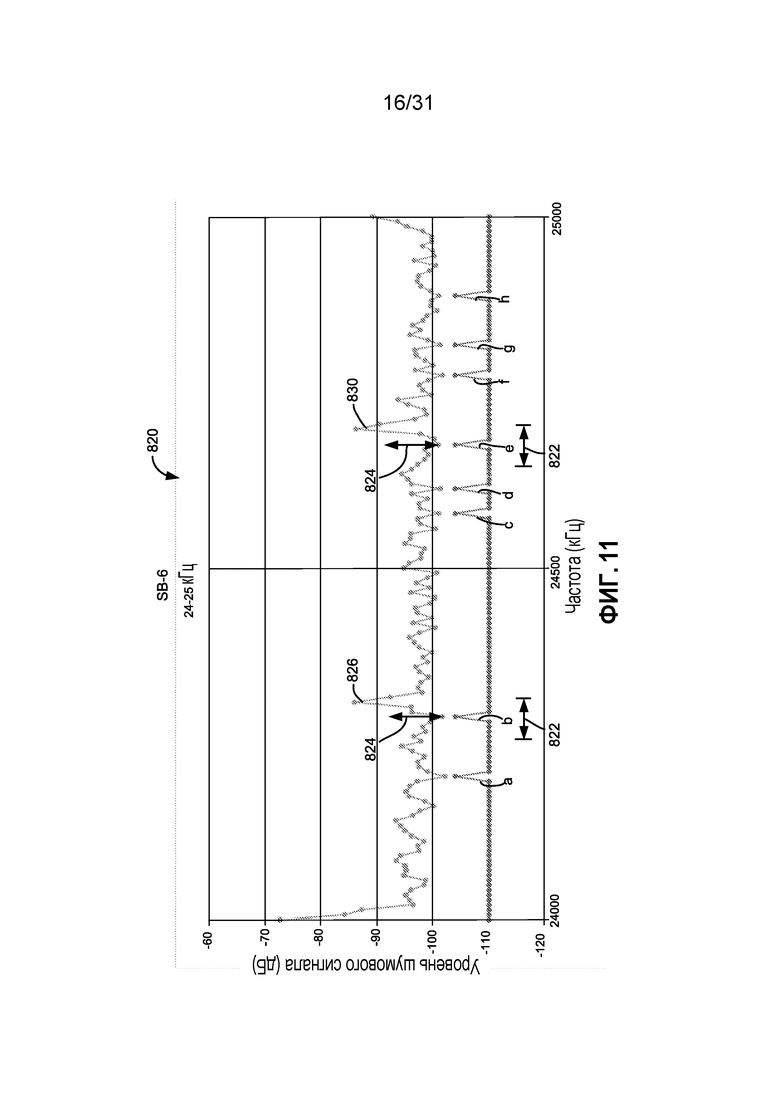
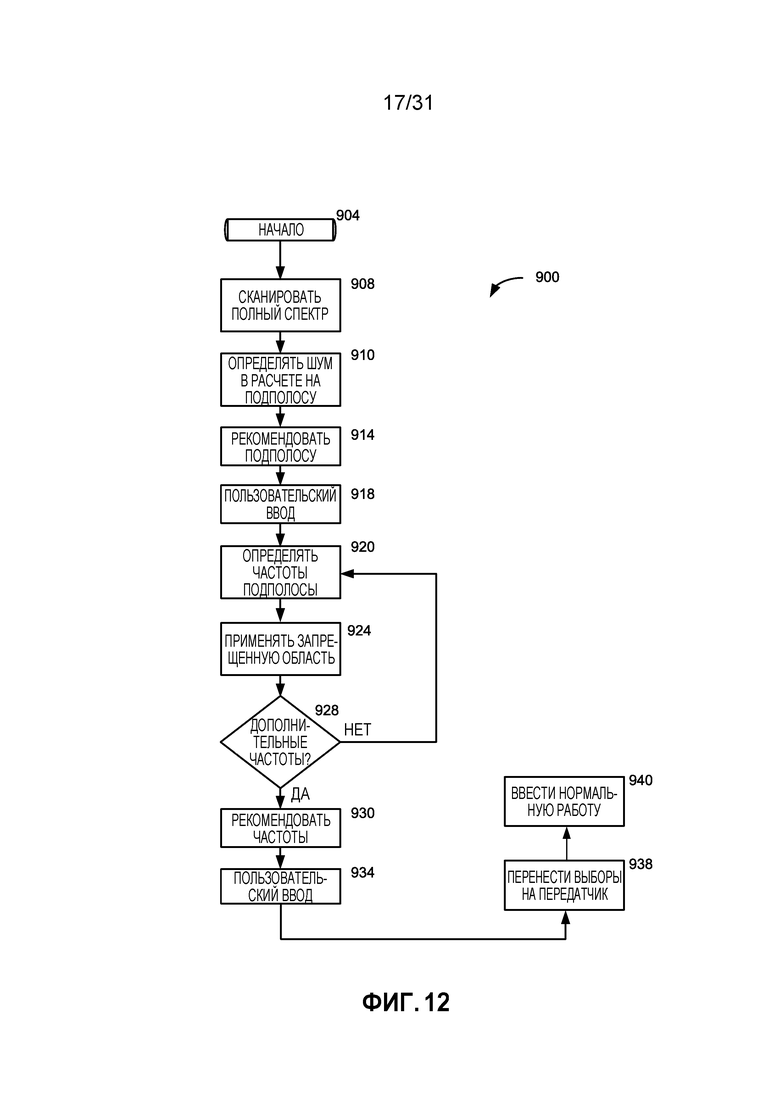
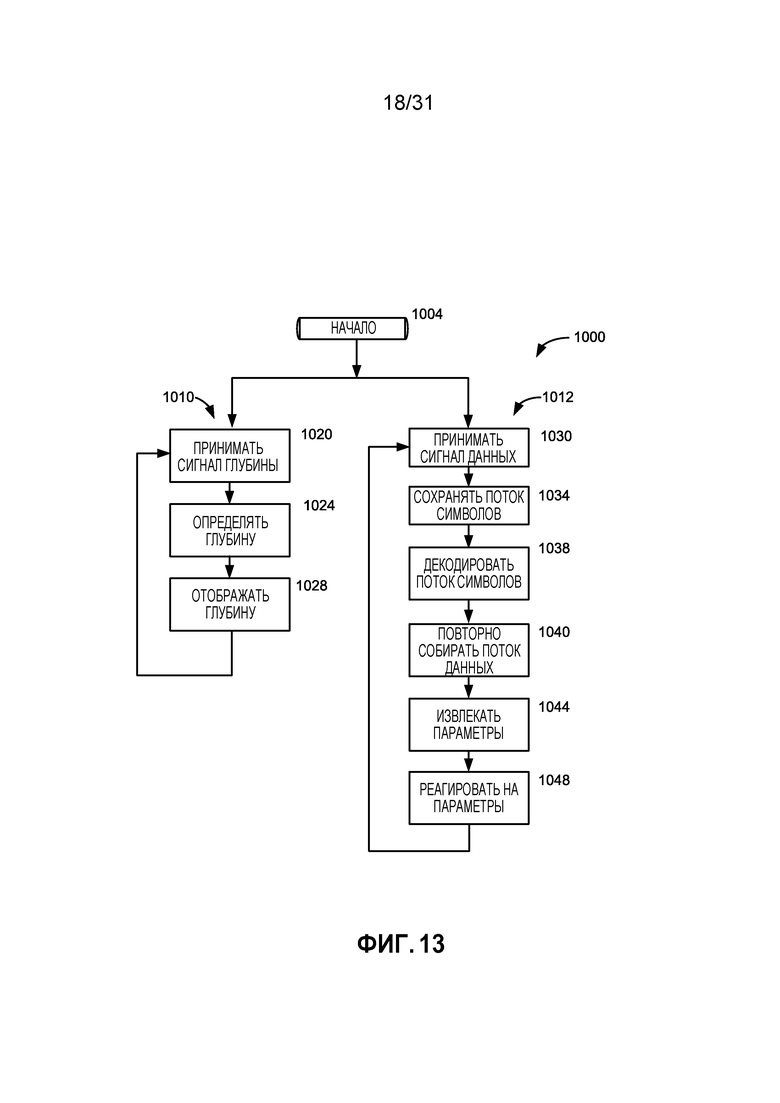
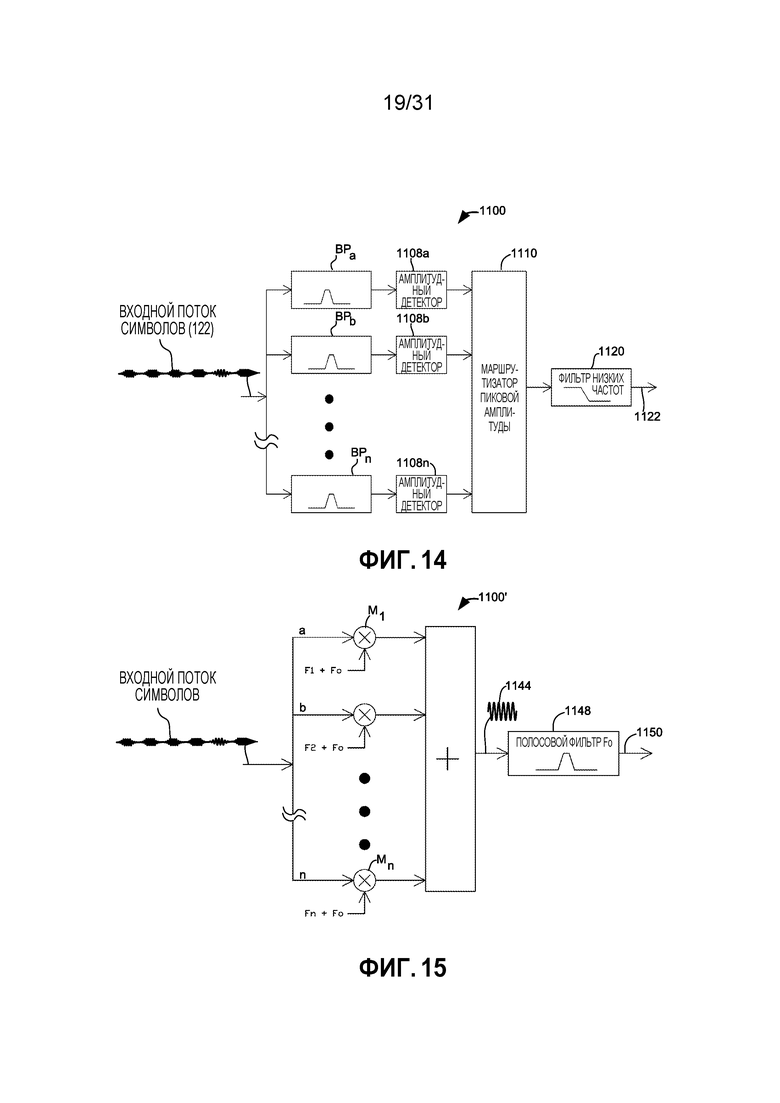
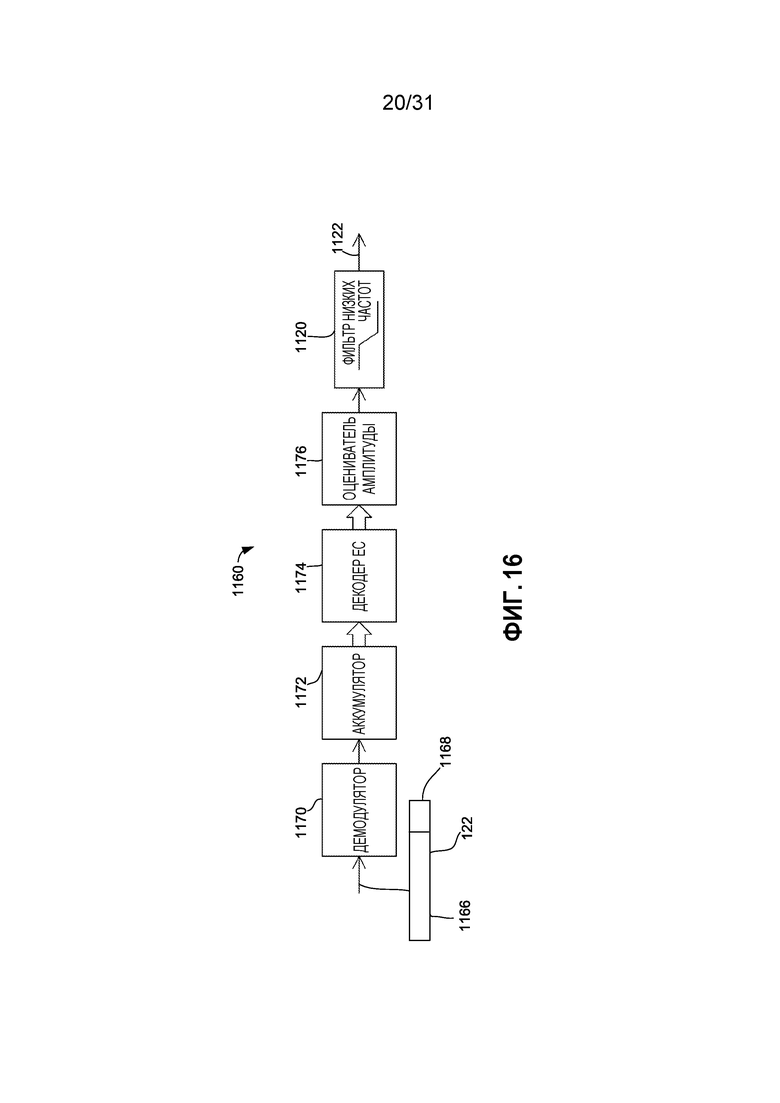
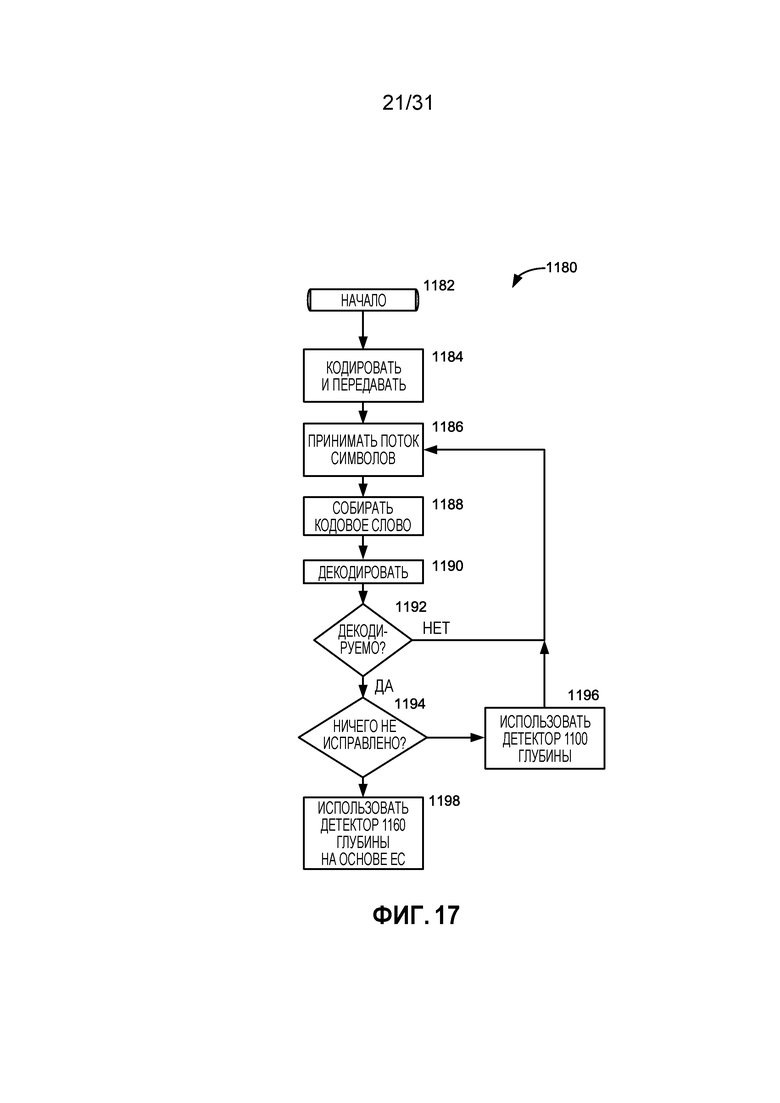
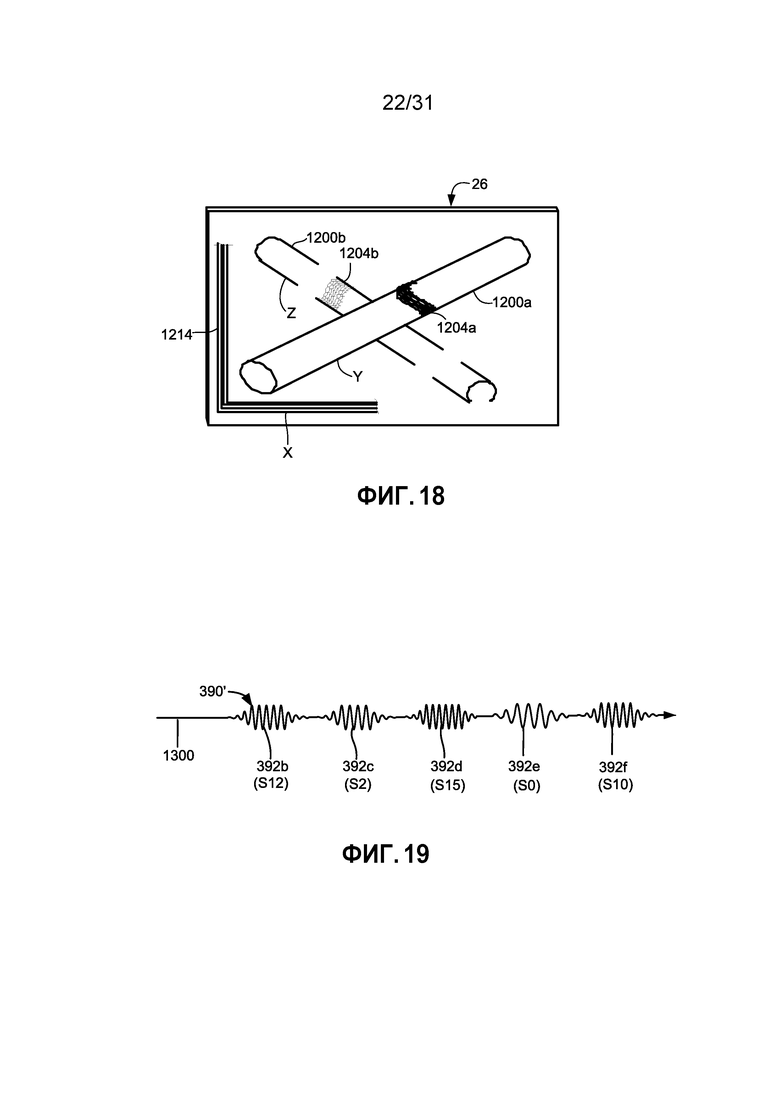
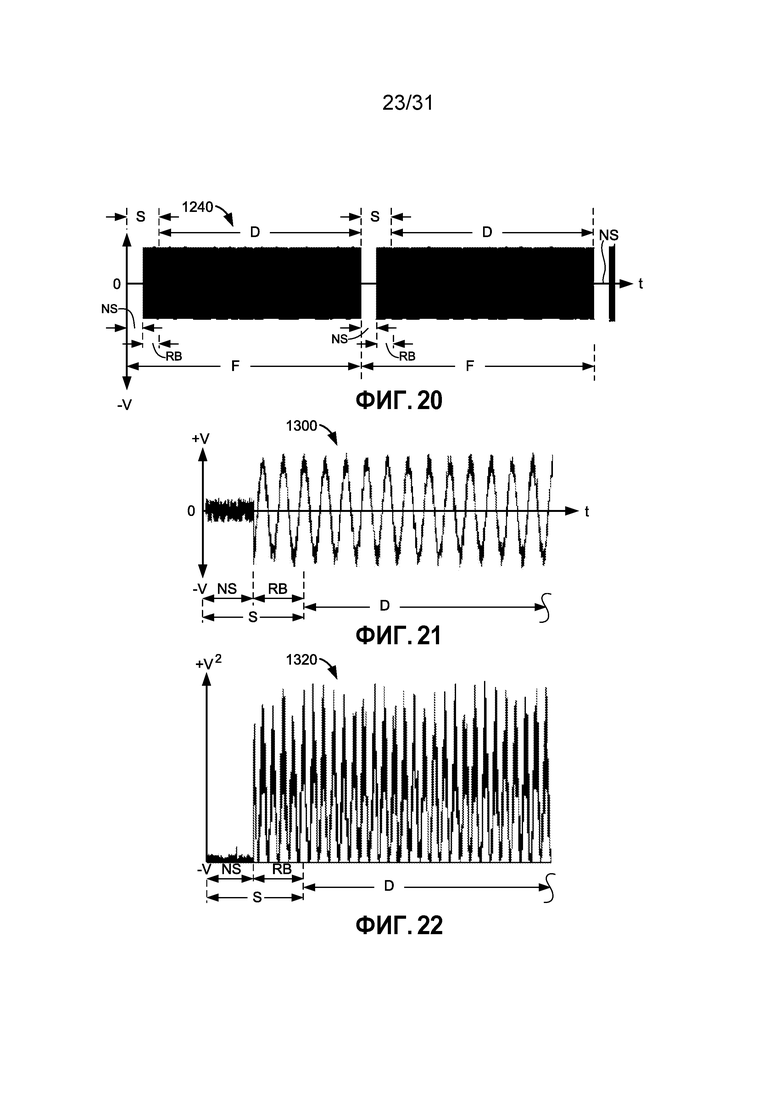
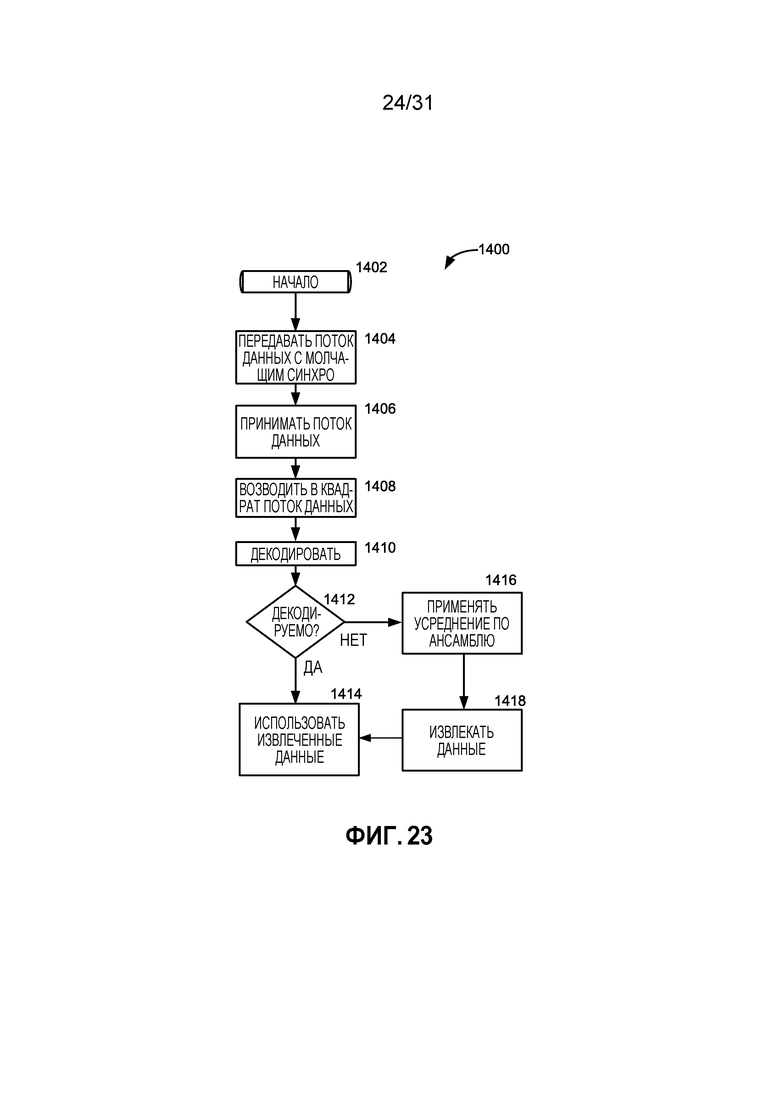
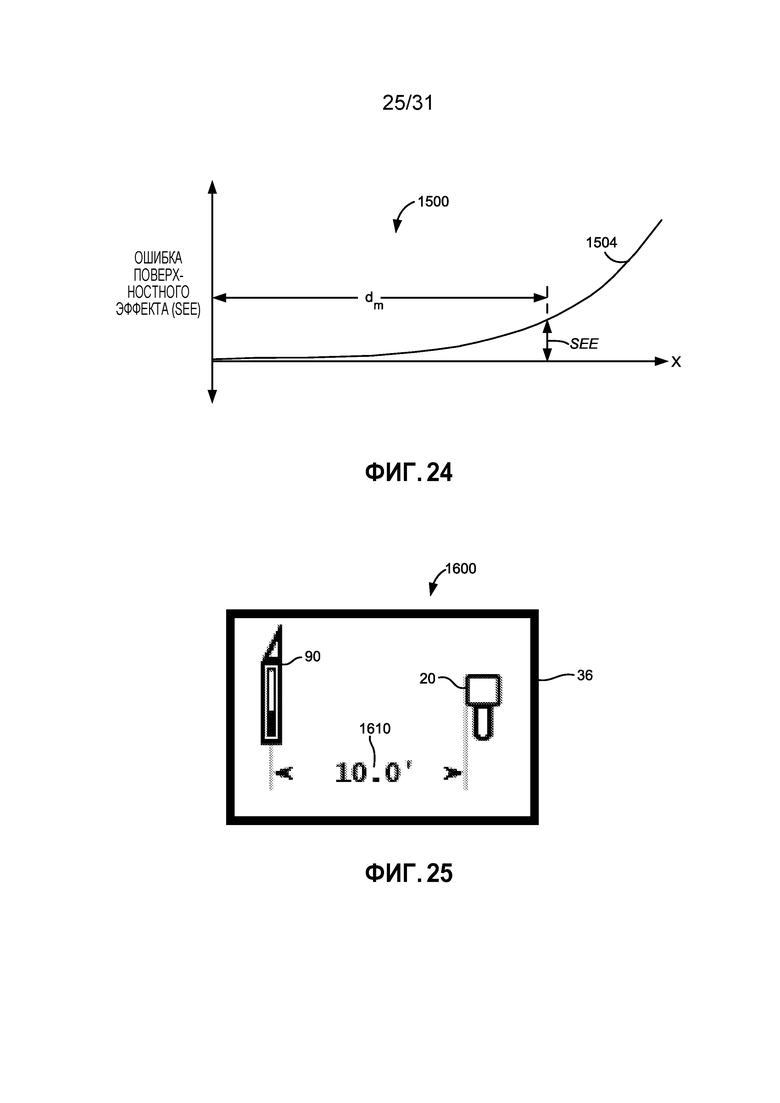
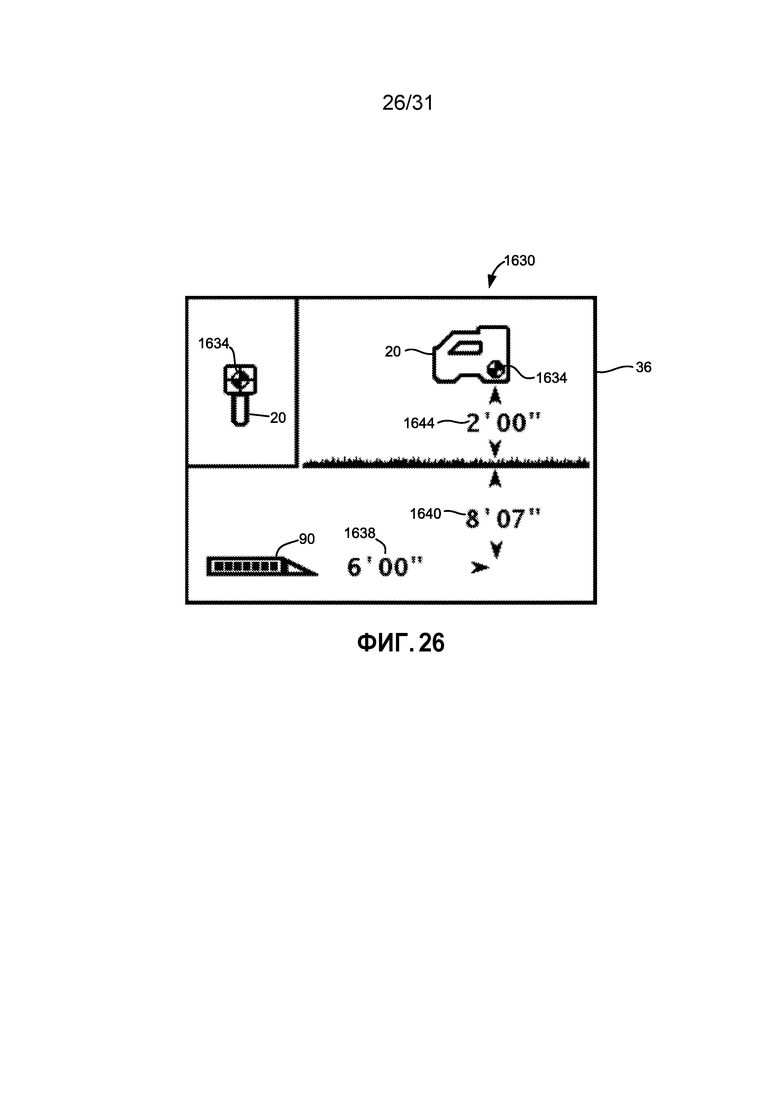
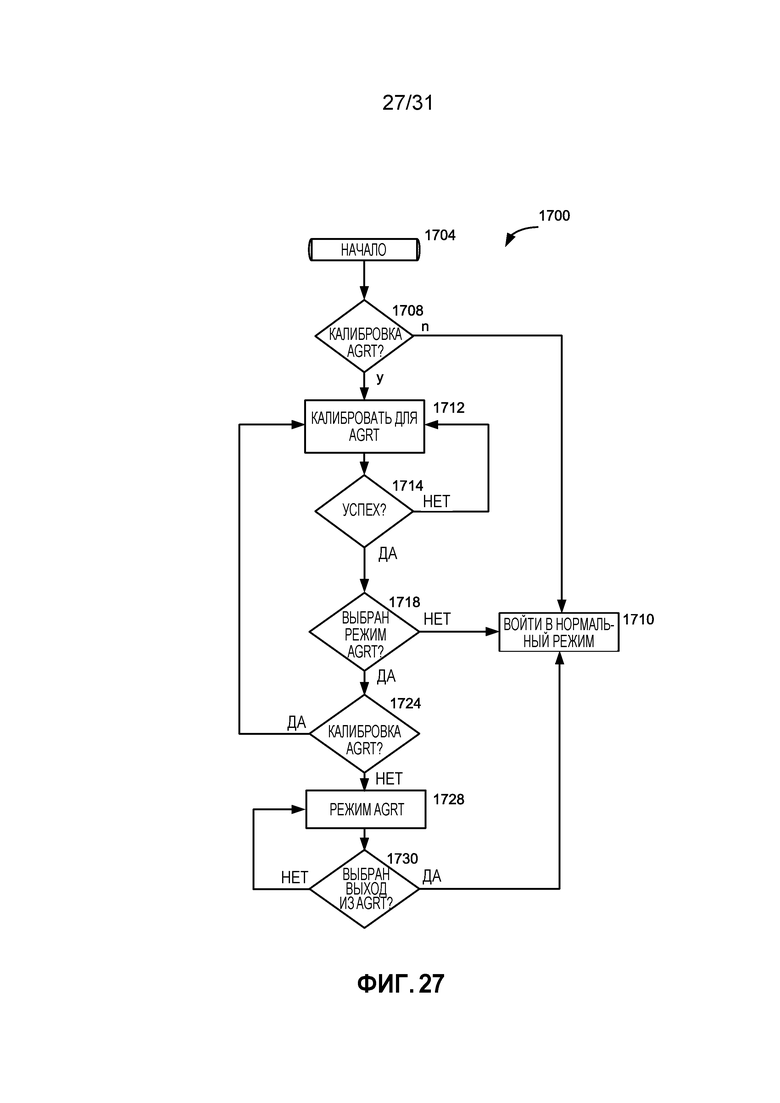
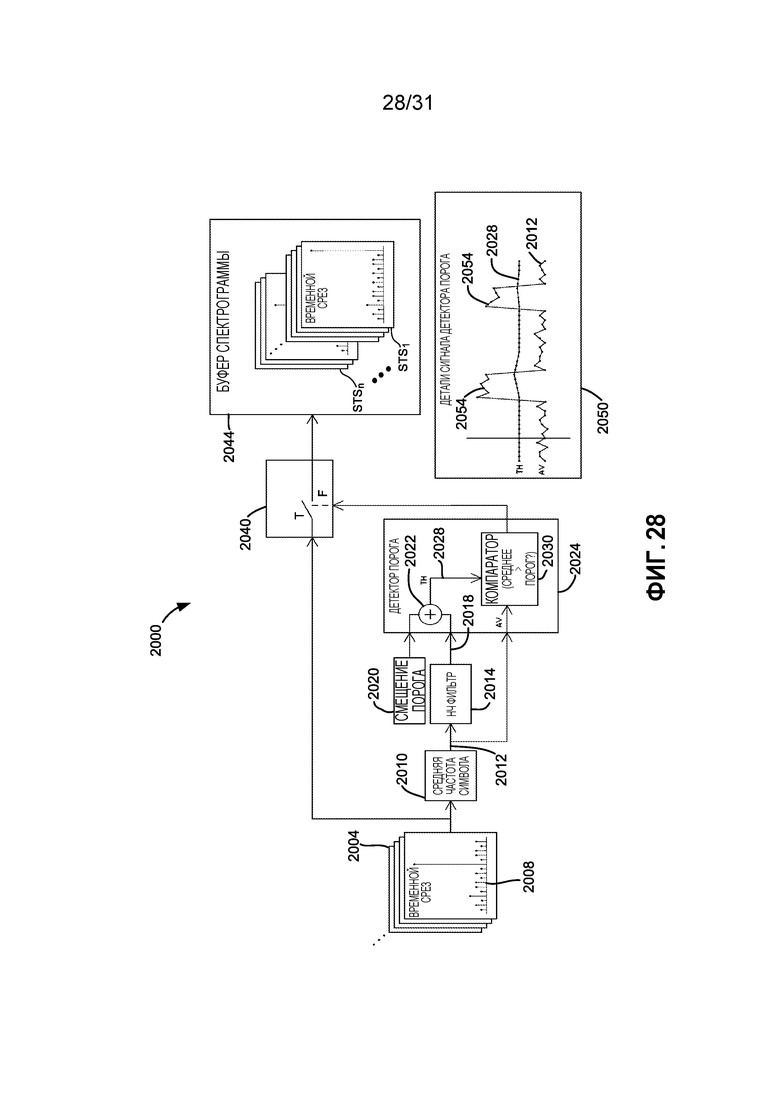
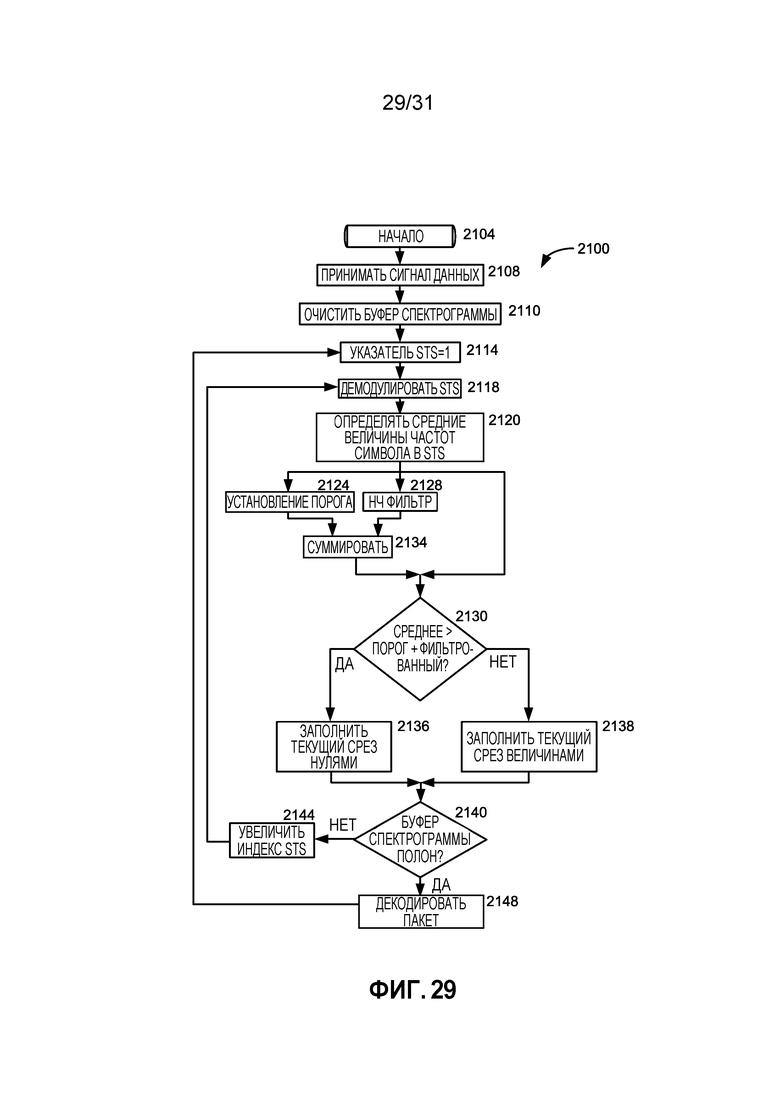
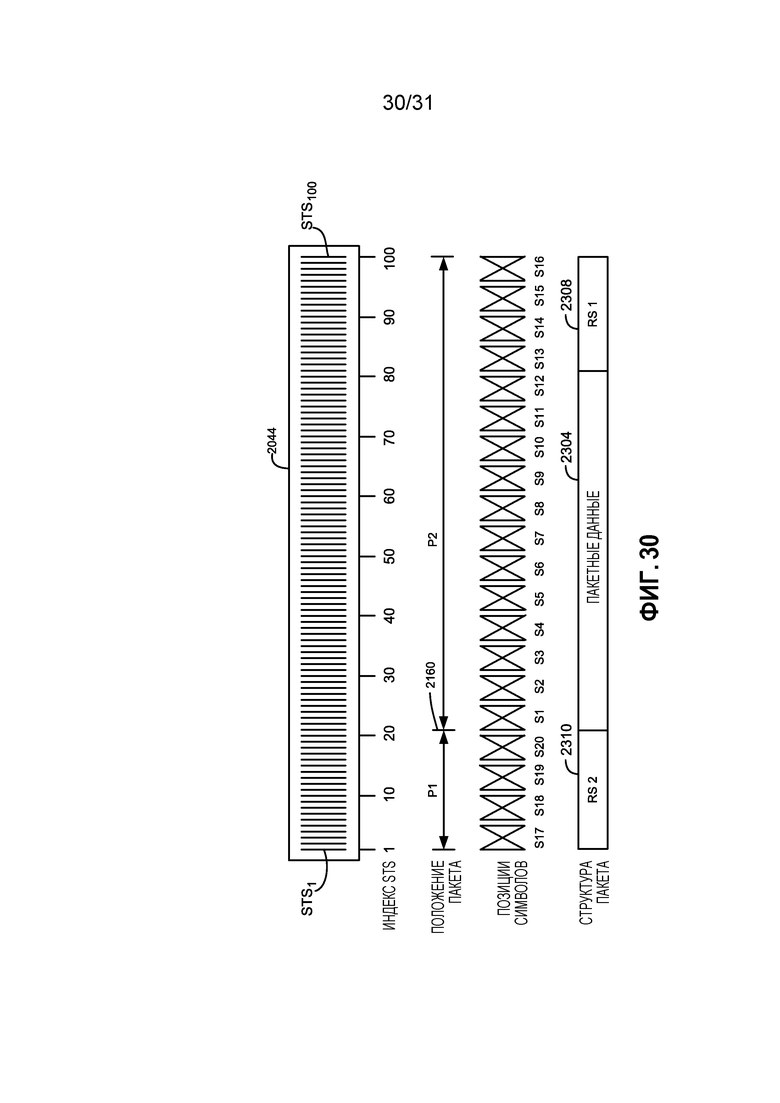
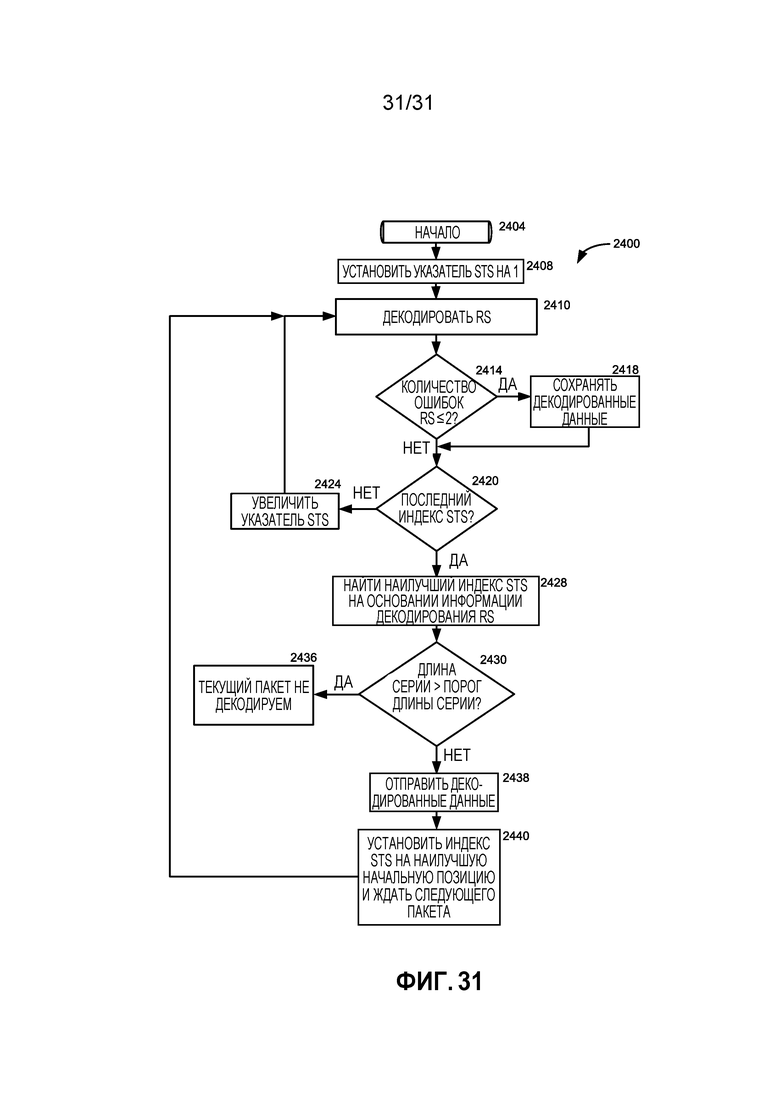
Изобретение относится к бурению горизонтальных скважин. Техническим результатом является обеспечение точности проводки скважины. В частности, предложена система для горизонтального бурения, содержит передатчик для использования совместно с системой горизонтального направленного бурения, которая передает поток многобитовых символов, который характеризует символы датчика для приема наземным портативным устройством. При этом портативное устройство принимает поток символов для наземного извлечения сигналов датчиков. Передатчик может точно размещать частоты символа, по меньшей мере, чтобы избегать зашумленной среды, а также чтобы избегать гармоник электропитания, и может использовать формирование волны для передаваемых символов, по меньшей мере, для обеспечения управления мощностью передачи, управления спектральным составом и согласования широкополосной антенны. Приемник может измерять зашумленную среду для идентификации частот символа, используемых передатчиком. Шум можно сканировать с увеличивающимся разрешением в широкой полосе частот для отображения или автоматического выбора частоты символа. 13 н. и 65 з.п. ф-лы, 4 табл., 42 ил.
1. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков; и
компоновку антенных возбудителей для электрического возбуждения упомянутой антенны для излучения дипольного сигнала определения местоположения, в качестве сигнала глубины, для наземного приема, по меньшей мере, для использования при определении глубины подземного оборудования и для электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
2. Передатчик по п. 1, в котором упомянутая компоновка антенных возбудителей включает в себя первый возбудитель для электрического возбуждения антенны для излучения сигнала глубины и второй антенный возбудитель для электрического возбуждения антенны для излучения потока электромагнитных символов.
3. Передатчик по п. 1, в котором упомянутый поток многобитовых символов включает в себя, по меньшей мере, четыре разных символа, таким образом, что каждый символ представляет, по меньшей мере, два бита.
4. Передатчик по п. 3, в котором каждый из символов передается на частоте символа, которая является немодулированной, таким образом, что разные символы передаются на разных частотах символа.
5. Передатчик по п. 4, в котором упомянутый процессор выполнен с возможностью передачи каждой из частот символа на указанном уровне мощности на основании выделения мощности таким образом, что одна из частот символа передается на первом уровне мощности, который отличается от второго уровня мощности для, по меньшей мере, одной другой частоты символа.
6. Передатчик по п. 1, дополнительно содержащий:
прямой цифровой синтезатор, выполненный с возможностью генерации упомянутого потока многобитовых символов.
7. Передатчик по п. 6, в котором прямой цифровой синтезатор включает в себя первый канал, предназначенный для генерирования сигнала глубины для дополнительного возбуждения антенны для излучения дипольного сигнала определения местоположения, и второй канал, предназначенный для генерирования упомянутого потока многобитовых символов.
8. Передатчик по п. 7, в котором сигнал глубины непрерывно передается на фиксированной частоте сигнала глубины, независимо от потока электромагнитных символов.
9. Передатчик по п. 6, в котором прямой цифровой синтезатор выполнен с возможностью генерации множества частот символа в широкой полосе частот, и прямой цифровой синтезатор выполнен с возможностью ограничения частот символа узкой полосой, которая меньше широкой полосы частот и, по меньшей мере, приблизительно согласована с упомянутой антенной.
10. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
прямой цифровой синтезатор, выполненный с возможностью генерирования потока символов, образованного множеством символов фиксированной частоты, и прямой цифровой синтезатор выполнен с возможностью формирования некоторой формы волны возбуждения для разных частот символа; и
антенный возбудитель для электрического возбуждения антенны на основании потока символов для излучения потока электромагнитных символов для наземного извлечения сигналов датчиков.
11. Передатчик по п. 10, в котором прямой цифровой синтезатор выполнен с возможностью передачи в широкой полосе частот в ответ на сигналы датчиков таким образом, что, по меньшей мере, участок широкой полосы частот рассогласуется с антенной, и формирования некоторой формы волны, по меньшей мере, для управления энергопотреблением передатчика, связанным с разными частотами символа, чтобы энергопотребление передатчика не изменялось в широкой полосе частот по сравнению с постоянными напряжением и формой волны возбуждения.
12. Передатчик по п. 10, в котором широкая полоса частот составляет, по меньшей мере, приблизительно, от 9 кГц до 45 кГц.
13. Передатчик по п. 10, в котором прямой цифровой синтезатор включает в себя набор поисковых таблиц, задающий соответствующий набор форм волны, которые охватывают широкую полосу частот, и разные частоты символа конкретно устанавливаются на основании форм волны ряда поисковых таблиц.
14. Передатчик по п. 13, в котором формы волны из набора форм волны изменяются в соответствии с увеличением частоты от синусоидальной формы к ступенчатой форме на конкретной частоте в широкой полосе частот.
15. Передатчик по п. 14, в котором формы волны самой верхней группы выше конкретной частоты изменяют свою форму от импульсовидной до прямоугольной волны с увеличением частоты.
16. Передатчик по п. 10, в котором упомянутый прямой цифровой синтезатор включает в себя формирователь для постепенного доведения величины каждого символа к началу и концу до нулевой величины для ограничения спектрального расширения символов.
17. Передатчик по п. 10, в котором прямой цифровой синтезатор включает в себя приращение частоты для генерирования разных частот символа во всей полосе передатчика таким образом, что одна из частот символа может располагаться посередине между любыми данными соседними гармониками электропитания частоты электропитания 50 Гц и 60 Гц.
18. Передатчик по п. 17, в котором каждая частота символа включает в себя спектр, основной пик которого попадает между данными соседними гармониками электропитания, и спектр демонстрирует нуль на каждой частоте гармоники электропитания данной одной из частот электропитания 50 Гц и 60 Гц.
19. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков; и
компоновку антенных возбудителей для электрического возбуждения антенны на основании потока многобитовых символов для излучения потока электромагнитных символов, по меньшей мере, для наземного извлечения сигналов датчиков.
20. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема сигнала передатчика в качестве потока многобитовых символов, который, по меньшей мере, характеризует набор информации датчика, относящейся к работе передатчика в ходе подземных работ для извлечения набора информации датчика.
21. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от упомянутого передатчика для формирования потока многобитовых символов на основании набора частот символа, причем каждый из многобитовых символов соответствует одной из частот символа, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, и (ii) принимать поток многобитовых символов от передатчика в ходе подземных работ для извлечения информации датчика.
22. Портативное устройство по п. 21, в котором приемник выполнен с возможностью автоматически выбирать набор частот символа.
23. Портативное устройство по п. 21, в котором упомянутый приемник выполнен с возможностью идентифицировать, по меньшей мере, четыре частоты символа в упомянутом наборе.
24. Портативное устройство по п. 21, дополнительно содержащее:
компоновку связи для переноса идентифицированных частот символа на упомянутый передатчик, чтобы передатчик после этого осуществлял передачу на идентифицированных частотах символа.
25. Портативное устройство по п. 21, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот на каждом фиксированном шаге увеличения частоты.
26. Портативное устройство по п. 25, в котором фиксированный шаг увеличения частоты устанавливается в соответствии с разрешением по частоте символа упомянутого передатчика, которое задает минимальное разнесение по частоте между разными частотами символа.
27. Портативное устройство по п. 26, в котором фиксированный шаг увеличения частоты равен 5 Гц.
28. Портативное устройство по п. 25, в котором полоса частот охватывает множество подполос, благодаря чему передатчик ограничивается передачей частот символа в конкретной одной из упомянутых подполос, и приемник выполнен с возможностью идентифицировать упомянутый набор частот символа в каждой подполосе.
29. Портативное устройство по п. 28, в котором упомянутый приемник выполнен с возможностью определения среднего шума в расчете на подполосу на основании набора частот символа, идентифицированного для каждой подполосы.
30. Портативное устройство по п. 28, дополнительно содержащее:
дисплей для отображения среднего шума в расчете на подполосу.
31. Портативное устройство по п. 25, в котором полоса частот охватывает множество подполос, и приемник выполнен с возможностью изменения оператором набора частот символа, по меньшей мере, в выбранной подполосе.
32. Портативное устройство по п. 28, дополнительно содержащее:
дисплей, который выполнен с возможностью отображения, по меньшей мере, одного статистического значения шума для каждой подполосы в режиме выбора частоты и активного обновления отображения для каждой подполосы на основании ряда обновлений статистического значения.
33. Портативное устройство по п. 31, в котором упомянутое изменение, совершаемое оператором, включает в себя перемещение, по меньшей мере, одной частоты символа из набора частот символа из выбранной подполосы в другую подполосу.
34. Портативное устройство по п. 33, включающее в себя дисплей для отображения, по меньшей мере, выбранной подполосы и для увеличения масштаба детализации на выбранной подполосе.
35. Портативное устройство по п. 21, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот на каждом фиксированном шаге увеличения частоты.
36. Портативное устройство по п. 25, в котором упомянутый приемник выполнен с возможностью характеризовать шум в наборе подполос частот, которые охватывают полосу частот, и рекомендовать выбранную одну из подполос частот для передачи частот символа на основании, по меньшей мере, одного статистического значения шума, соответствующего рекомендованной подполосе частот, по сравнению со статистическим значением шума, соответствующим другим подполосам.
37. Портативное устройство по п. 36, в котором статистическое значение является, по меньшей мере, одним из пикового шума, минимального шума и среднеквадратического отклонения.
38. Портативное устройство по п. 36, в котором приемник рекомендует выбранную подполосу на основании множества статистических значений шума, включающих в себя средний шум совместно с, по меньшей мере, одним из пикового шума, минимального шума и среднеквадратического отклонения.
39. Портативное устройство по п. 25, в котором каждое измерение шума в наборе измерений шума характеризует шум как векторную сумму для установления трехмерного значения шума.
40. Портативное устройство по п. 25, выполненное с возможностью выборочного отображения шума для каждого измерения шума вдоль единственной оси приема.
41. Портативное устройство по п. 21, в котором упомянутый приемник выполнен с возможностью измерять электромагнитный шум путем сканирования с использованием фиксированного шага увеличения частоты по полосе частот для создания набора измерений шума, которые характеризуют шум в полосе частот при каждом фиксированном приращении частоты, и упомянутый приемник выбирает набор частот символа на основании, по меньшей мере, одного из среднего шума, среднеквадратического отклонения и пикового шума в наборе измерений шума.
42. Портативное устройство по п. 41, в котором упомянутый приемник выполнен с возможностью применения запрещенного интервала с центром в каждой частоте символа для исключения любой частоты символа, для которой пик шума попадает в запрещенный интервал при другом фиксированном приращении частоты и нарушает порог шума.
43. Портативное устройство по п. 21, в котором упомянутый передатчик передает каждую частоту символа со спектром частот символа, и упомянутый приемник выполнен с возможностью приема каждой частоты символа, причем характеристика приемника согласована со спектром частот символа.
44. Портативное устройство по п. 43, в котором каждый спектр частот символа включает в себя нуль на каждой частоте гармоники электропитания данной частоты электропитания, и характеристика приемника демонстрирует соответствующий нуль на каждой частоте гармоники электропитания данной одной из частот электропитания 50 Гц и 60 Гц таким образом, что электромагнитный шум на частотах гармоник электропитания подавляется приемником.
45. Портативное устройство по п. 21, в котором упомянутый приемник выполнен с возможностью, по меньшей мере, определения глубины передатчика в ходе подземных работ на основании приема частот символа.
46. Портативное устройство по п. 21, в котором приемник выполнен с возможностью, по меньшей мере, определения глубины передатчика в ходе подземных работ на основании сигнала глубины, который передается передатчиком независимо от частот символа.
47. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью (i) измерять электромагнитный шум и идентифицировать набор частот символа в соответствии с измеренным электромагнитным шумом для последующей передачи от упомянутого передатчика, по меньшей мере, для характеризации информации датчика, относящейся к работе передатчика, (ii) принимать частоты символа от передатчика в ходе подземных работ для извлечения информации датчика и (iii) выделять передаваемую мощность каждой из частот символа.
48. Портативное устройство по п. 47, дополнительно содержащее:
компоновку связи для переноса передаваемой мощности, выделяемой каждой частоте символа, на упомянутый передатчик, чтобы передатчик после этого осуществлял передачу на выделенной передаваемой мощности для каждой частоты символа.
49. Портативное устройство по п. 47, в котором упомянутый приемник выполнен с возможностью перевыделения мощности передачи передатчика между частотами символа в оперативном режиме для изменения мощностей передачи, выделяемых частотам символа в ходе работы передатчика.
50. Портативное устройство по п. 47, в котором упомянутый приемник выполнен с возможностью выделения мощности передачи передатчика между частотами символа на основании скользящего среднего интенсивности сигнала каждой частоты символа.
51. Портативное устройство по п. 47, в котором упомянутый приемник выполнен с возможностью неравномерного выделения мощности передачи передатчика частотам символа таким образом, чтобы, по меньшей мере, приблизительно поддерживать целевое энергопотребление для передатчика.
52. Портативное устройство по п. 47, в котором упомянутый процессор выполнен с возможностью выделения мощности передачи передатчика частотам символа для снижения общего энергопотребления передатчика, по меньшей мере, по сравнению с передачей всех частот символа на одинаковой мощности.
53. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема от передатчика структуры пакета, которая образована множеством многобитовых символов в потоке символов, включающем в себя по меньшей мере одну группу многобитовых символов, характеризующих информацию датчика как пакетные данные, и по меньшей мере еще одну группу многобитовых символов, выступающую в роли блока данных исправления ошибок, причем упомянутые пакетные данные характеризуют набор информации датчика, относящейся к работе передатчика в ходе подземных работ;
блок расслоения для приема каждого многобитового символа как множества срезов символа, которые разнесены по времени, и при этом каждый срез символа включает в себя набор величин частоты символа, включающий в себя величину для каждой частоты символа;
буфер спектрограммы, имеющий длину, образованную последовательностью позиций срезов, причем каждая из упомянутых позиций срезов выполнена с возможностью хранения по меньшей мере одного набора упомянутых величин частоты символа, и длина буфера спектрограммы достаточна для хранения суммарного количества срезов символа, соответствующего продолжительности времени структуры пакета;
переключатель временных срезов для маршрутизации срезов символа в позиции срезов буфера спектрограммы для последовательного и выборочного сохранения набора величин частоты символа, связанных с каждым последовательным срезом символа; и
декодер, выполненный с возможностью обнаружения, в порядке извлечения пакетных данных, начального символа структуры пакета в буфере спектрограммы на основании блока данных исправления ошибок.
54. Портативное устройство по п. 53, дополнительно содержащее:
детектор порога для приведения в действие переключателя временных срезов для исключения дальнейшей загрузки величин частоты символа любого данного среза символа, подверженного всплеску шумов, на основании порога шума в данную одну из позиций срезов буфера спектрограммы.
55. Портативное устройство по п. 54, в котором детектор порога выполнен с возможностью загрузки нулей в данную позицию среза символа в буфере спектрограммы.
56. Портативное устройство по п. 53, в котором упомянутый декодер выполнен с возможностью извлечения пакетных данных без символа синхронизации как части структуры пакета.
57. Портативное устройство по п. 53, в котором каждый символ характеризуется n срезами символа в буфере спектрограммы, и упомянутый декодер выполнен с возможностью инициирования попытки декодирования, начиная с каждой позиции среза в буфере спектрограммы, и регистрации количества исправленных ошибок для каждой позиции среза, причем каждая попытка декодирования основывается на пакете срезов, начинающегося с данной позиции среза совместно с каждой n-й позицией среза от данной позиции среза в длине буфера спектрограммы, таким образом, что количество исправленных ошибок для каждого пакета срезов указывает позицию начального символа в буфере спектрограммы.
58. Портативное устройство по п. 53, в котором упомянутый буфер спектрограммы выполнен с возможностью хранения набора величин частоты символа для каждого временного среза в формате комплексных чисел.
59. Система для использования в горизонтальном направленном бурении, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутая система содержит:
передатчик, поддерживаемый подземным оборудованием, включающий в себя
антенну,
один или более датчиков для генерирования одного или более сигналов датчиков,
процессор, выполненный с возможностью генерирования потока многобитовых символов на основании сигналов датчиков, и
антенный возбудитель для электрического возбуждения антенны для излучения потока электромагнитных символов на основании потока многобитовых символов; и
портативное устройство, включающее в себя
приемник, выполненный с возможностью приема потока многобитовых символов в нормальном режиме в ходе подземных работ для извлечения набора информации датчика в условиях электромагнитного шума.
60. Система по п. 59, в которой упомянутый приемник выполнен с возможностью, в режиме выбора частоты, измерять электромагнитный шум, отклонять передачу упомянутого потока электромагнитных символов, и идентифицировать набор частот символа на основании измеренного электромагнитного шума для последующей передачи от упомянутого передатчика для формирования потока многобитовых символов на основании набора частот символа, причем каждый из многобитовых символов соответствует одной из частот символа.
61. Передатчик для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, которое поддерживает передатчик, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для генерирования одного или более сигналов датчиков;
модулятор для генерирования по меньшей мере одной модулированной частоты данных на несущей частоте на основании сигналов датчиков;
генератор тонов глубины для создания частоты немодулированного тона глубины, которая в двадцать или более раз меньше несущей частоты; и
антенный возбудитель для электрического возбуждения по меньшей мере одной антенны для излучения частоты тона глубины и несущей частоты для наземной регистрации частоты тона глубины и для извлечения сигналов датчиков из модулированной частоты данных.
62. Передатчик по п. 61, в котором упомянутая частота тона глубины меньше или равна 1,5 кГц.
63. Передатчик по п. 62, в котором единственная несущая частота находится в диапазоне от 30 кГц до 45 кГц, включительно.
64. Передатчик по п. 61, дополнительно содержащий:
прямой цифровой синтезатор, включающий в себя первый канал, выступающий в роли генератора тонов глубины для генерации частоты тона глубины, и второй канал, который генерирует единственную несущую частоту.
65. Портативное устройство для использования совместно с системой горизонтального направленного бурения, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, и подземное оборудование поддерживает передатчик, который передает электромагнитный сигнал, регистрируемый портативным устройством, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутое портативное устройство содержит:
приемник для регистрации сигнала, когда передатчик находится над землей в первом рабочем режиме, и под поверхностью земли во втором рабочем режиме; и
процессор, выполненный с возможностью работы по выбору в (i) упомянутом первом режиме для определения наземного расстояния от портативного устройства до передатчика на основании измеренной на земле интенсивности сигнала упомянутого электромагнитного сигнала и компенсации поверхностного эффекта, и (ii) в упомянутом втором режиме, когда передатчик находится под землей, для определения глубины передатчика под поверхностью на основании измеренной под землей интенсивности сигнала упомянутого электромагнитного сигнала.
66. Портативное устройство по п. 65, в котором упомянутый второй режим позволяет устанавливать определенную глубину без применения какой-либо компенсации.
67. Портативное устройство по п. 65, в котором второй режим позволяет применять форму компенсации, отличную от компенсации поверхностного эффекта, к определенной глубине для установления скомпенсированной глубины под землей.
68. Портативное устройство по п. 67, в котором формой компенсации является компенсация скин-эффекта.
69. Портативное устройство по п. 65, в котором компенсация поверхностного эффекта определяется на основании, по меньшей мере приблизительно, куба определенного наземного расстояния для установления расстояния с компенсацией поверхностного эффекта.
70. Портативное устройство по п. 69, в котором компенсация поверхностного эффекта определяется дополнительно на основании калибровочной постоянной.
71. Портативное устройство по п. 65, в котором наземное расстояние с компенсацией поверхностного эффекта (AGRCOMP) определяется как:

где dss - наземное расстояние от портативного устройства до передатчика, причем передатчик находится над поверхностью земли, на основании измеренной на земле интенсивности сигнала упомянутого сигнала и k - калибровочная постоянная.
72. Портативное устройство по п. 71, в котором k определяется на основании известного наземного расстояния между портативным устройством и передатчиком и значения dss, которое определяется на известном наземном расстоянии.
73. Система для использования в горизонтальном направленном бурении, которая включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутая система содержит:
передатчик, который включает в себя один или более датчиков для измерения одного или более рабочих параметров, характеризующих состояние подземного оборудования, причем такой передатчик передает на двух или более частотах, причем по меньшей мере одна из таких частот сама представляет множественные биты данных, характеризующие упомянутое состояние подземного оборудования независимо от какой-либо модуляции таких частот; и
портативное устройство, включающее в себя
приемник, выполненный с возможностью приема упомянутых двух или более частот, и
процессор, выполненный с возможностью извлечения упомянутого состояния подземного оборудования из упомянутых двух или более частот.
74. Система по п. 73, в которой упомянутое портативное устройство выполнено с возможностью, в режиме выбора частоты, измерять электромагнитный шум, отклонять передачу упомянутых частот и идентифицировать частоты на основании измеренного электромагнитного шума для последующей передачи от упомянутого передатчика в качестве упомянутых двух или более частот.
75. Система по п. 73, в которой каждая частота представляет два или более битов.
76. Система по п. 75, в которой каждая частота является немодулированной.
77. Передатчик для использования в горизонтальном направленном бурении, который включает в себя бурильную колонну, которая проходит от бурового станка к подземному оборудованию, таким образом, что удлинение и укорочение бурильной колонны перемещает подземное оборудование сквозь толщу земли в ходе подземных работ, причем упомянутый передатчик содержит:
антенну;
один или более датчиков для измерения одного или более рабочих параметров, характеризующих состояние подземного оборудования;
антенный возбудитель для возбуждения антенны для передачи на двух или более частотах, причем по меньшей мере одна из таких частот сама представляет множественные биты данных, характеризующие упомянутое состояние подземного оборудования независимо от какой-либо модуляции таких частот для наземного приема для извлечения состояния подземного оборудования.
78. Портативное устройство для использования совместно с передатчиком, который выполнен с возможностью перемещения сквозь толщу земли в области в ходе рабочей процедуры, передавая при этом сигнал передатчика, который может приниматься портативным устройством, подверженный электромагнитному шуму, который может изменяться в упомянутой области, причем упомянутое портативное устройство содержит:
приемник, выполненный с возможностью приема двух или более частот сигнала передатчика, причем по меньшей мере одна из упомянутых частот сама представляет множественные биты данных, характеризующие состояние подземного оборудования независимо от какой-либо модуляции; и
процессор, выполненный с возможностью извлечения состояния подземного оборудования из упомянутых двух или более частот.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 7495445 B2, 24.02.2009 | |||
| Устройство передачи адресной информации | 1979 |
|
SU873465A1 |
| WO 2013062949 A1, 02.05.2013 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПНЕВМОПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2009298C1 |

