Изобретение относится к электротехнике и может быть использовано для управления асинхронными двигателями, работающими с переменной нагрузкой.
Известны способ управления электродвигателем путем переключения обмоток электродвигателя со схемы "звезда" на схему "треугольник" и обратно [Авторское свидетельство SU 1129708 А1, МКИ Н02Р 1/32, опубл. 15.12.1984], способ переключений обмоток электродвигателя "треугольник-звезда" и обратно с силовой коммутацией полупроводниковых ключей [Авторское свидетельство SU 1277326 А1, 1277326, МКИ Н02Р 1/32, опубл. 15.12.1986], способ управления трехфазным асинхронным электродвигателем путем переключения его обмоток со схемы звезда на схему треугольник и обратно [Авторское свидетельство SU 1831763, МКИ Н02Р 1/32, опубл. 30.07.1993], способ управления трехфазным асинхронным электродвигателем путем переключения его обмоток со схемы звезда на схему треугольник и обратно [Авторское свидетельство SU 1396230 А1, МКИ Н02Р 1/32, опубл. 15.05.1988], а также способ пуска асинхронного двигателя [Патент на изобретение RU 2516255 С2, МКИ Н02Р 1/26, H02K 17/14, опубл. 20.05.2014]. В известных способах переключение из схемы «звезда» в схему «треугольник» осуществляют для уменьшения пусковых токов.
В статье [Паноев А.Т. Повышение энергоэффективности при переключении обмоток статора по схеме "треугольник - звезда" асинхронных двигателей в текстильной промышленности // Вопросы науки и образования. 2017. №10. С. 8-11] указано, что переходить на схему «звезда» следует при коэффициенте загрузки двигателя менее 0,4. В статье [Осиненко С.И. Повышение энергоэффективности станков-качалок путем переключения обмоток статора с "треугольника" на "звезду" // Инновационные технологии: теория, инструменты, практика. 2014. №1. С. 405-408] указано, что при нагрузках более 50% двигатель необходимо включать по схеме «треугольник». В известных источниках отсутствует точное значение нагрузки, ниже которой конкретный двигатель следует включать на схему «звезда».
Известно устройство для переключения статорной обмотки трехфазного асинхронного электродвигателя со схемы "звезда" на схему "треугольник" и обратно [Авторское свидетельство SU 1750012 А1, МКИ Н02Р 1/32, опубл. 23.07.1992]. Переключение осуществляется с целью повышения КПД двигателя, однако конкретная загрузка двигателя, при которой должно осуществляется данное переключение, не указана.
Известна энергосберегающая схема звезда-треугольник [Полезная модель Германии DE 9418333 U1, МКИ Н02Р 7/52, опубл. 17.08.1995], согласно которой двигатель включается на схему «звезда» при снижении мощности приблизительно до 33%, однако точного значения мощности переключения для конкретного двигателя не указано.
Известен асинхронный двигатель с зависимым от нагрузки соединением в «звезду» или «треугольник» [Международный патент WO 2012/163433 A3, МКИ Н02Р 1/32, опубл 06.12.2012]. В данном патенте также не указано граничное значение нагрузки, при которой осуществляется то или иное соединение.
Наиболее близким техническим решением, принятым за прототип, является способ, реализуемый в асинхронном двигателе, подключаемым по схеме "звезда" или "треугольник" в зависимости от нагрузки [Патент Китая CN 102811018 А, МПК Н02Р 25/18, опубл. 05.12.2012]. В пункте 0016 описания указано, что переключение на схему «звезда» осуществляют при снижении мощности двигателя до 30-50% от номинальной мощности, однако точное значение нагрузки, при которой должно осуществляться переключение, не установлено.
Изобретение решает задачу точного определения нагрузки конкретного двигателя, ниже которой его обмотку статора следует переключать из схемы «треугольник» в схему «звезда».
Техническим результатом от использования изобретения является повышение эффективности работы асинхронного двигателя за счет работы с максимально возможным КПД на схемах «треугольник» и «звезда».
Это достигается тем, что в способе управления асинхронным двигателем, заключающемся в переключении обмотки статора из схемы «треугольник» в схему «звезда» при снижении нагрузки, согласно изобретению, граничный коэффициент загрузки определяют по формуле
где Р0 - сумма потерь в стали и механических потерь двигателя;
PкY - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «звезда».
РкΔ - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «треугольник».
Заявляемый способ управления асинхронным двигателем отличается расчетом граничного коэффициента загрузки двигателя на основании суммы потерь в стали и механических потерь двигателя, а также суммы потерь в меди и добавочных потерь двигателя.
Формула, непосредственно связывающая граничное значение коэффициента загрузки с потерями в стали, механическими потерями, потерями в меди и добавочными потерями двигателя выведена автором впервые.
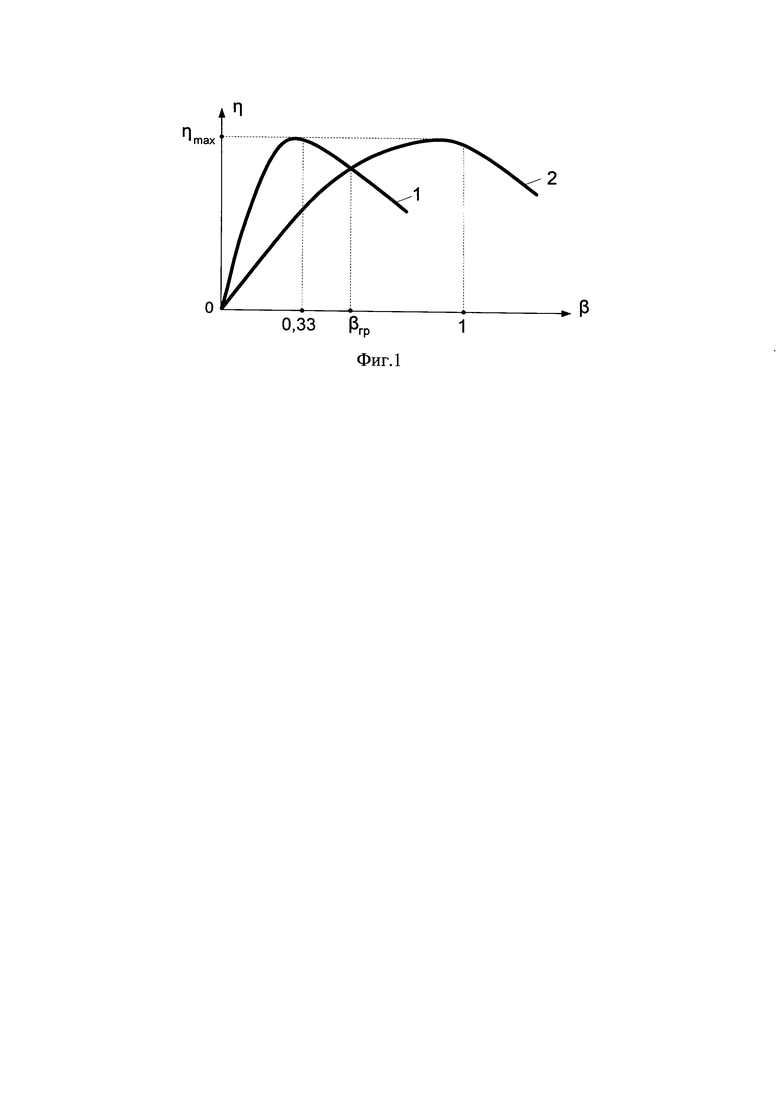
На фиг. 1 представлены зависимости КПД двигателя, обмотки статора которого включены по схеме «звезда» (кривая 1) и по схеме «треугольник» (кривая 2), от коэффициента загрузки двигателя.
Зависимость КПД двигателя с обмоткой статора, включенной по схеме «звезда», от коэффициента загрузки β определяется по формуле

где β - коэффициент загрузки, равный отношению текущей мощности двигателя к его номинальной (паспортной) мощности;
PY - номинальная мощность двигателя, включенного по схеме «звезда»;
Р0 - сумма потерь в стали и механических потерь двигателя (постоянные потери). Механические потери связаны с трением в подшипниках и с вентиляционными потерями, они пропорциональны скорости двигателя. Так как в асинхронных двигателях скорость в основном постоянна, механические потери также постоянны.
РкY - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «звезда» (переменные потери). Добавочные потери состоят из пульсационных и поверхностных потерь, возникающих в зубцах ротора и статора. Данные потери пропорциональны току двигателя, т.е. являются переменными.
Зависимость КПД двигателя с обмоткой статора, включенной по схеме «треугольник», от коэффициента загрузки β определяется по формуле
где РΔ - номинальная мощность двигателя, включенного по схеме «треугольник»;
РкΔ - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «треугольник» (переменные потери).
Потери Р0 одинаковы для схем «звезда» и «треугольник». С учетом того, что мощность двигателя, включенного по схеме «треугольник», превышает мощность двигателя, включенного по схеме «звезда», в три раза, из (2) получим
Для работы двигателя с максимально возможным КПД при снижении нагрузки двигателя до некоторого граничного значения βгр обмотку статора следует переключать из схемы «треугольник» в схему «звезда». Приравняв (2) и (3), получим граничное значение коэффициента загрузки, ниже которого обмотку статора следует включать по схеме «звезда»
Ток в обмотке статора, включенного по схеме «треугольник», втрое превышает ток в обмотке статора, включенного по схеме «звезда».
С учетом пространственного сдвига трех обмоток статора и временного сдвига подаваемых на обмотки статора напряжений на 120° относительно друг друга, сопротивление между обмотками статора zΔ, включенного по схеме «треугольник», в  раз меньше сопротивления между обмотками статора zY, включенного по схеме «звезда».
раз меньше сопротивления между обмотками статора zY, включенного по схеме «звезда».
Данное соотношение можно получить, используя тот факт, что в схеме «треугольник» обмотки статора включены на линейное напряжение Uл, которое в  раз больше фазного напряжения, на которое включены обмотки статора в схеме «звезда» С учетом выражения (5) и приняв zY=x⋅zΔ, исходя из закона Ома, получим
раз больше фазного напряжения, на которое включены обмотки статора в схеме «звезда» С учетом выражения (5) и приняв zY=x⋅zΔ, исходя из закона Ома, получим
откуда  или
или
С учетом (5) и (6) соотношение между переменными потерями двигателя, включенного по схемам «треугольник» и «звезда» имеет вид

следовательно, переменные потери РкΔ в  раз превышают переменные потери РкY. Подставив (7) в выражение (4), получим
раз превышают переменные потери РкY. Подставив (7) в выражение (4), получим

Граничное значение коэффициента загрузки можно получить также из выражения (4) через переменные потери в схеме «треугольник»

Пример осуществления способа.
Трехфазный асинхронный двигатель работает от сети напряжением Uн=380 В при соединении обмоток статора по схеме «звезда». При номинальной нагрузке двигатель потребляет из сети мощность PY=16,7 кВт, коэффициент мощности cosϕ1=0,87, КПД двигателя в номинальном режиме ηн=0,898. Магнитные потери Рм=265 Вт, механические потери Рмех=123 Вт, электрические потери в обмотках статора Рэ1=931 Вт, электрические потери в обмотке ротора Рэ2=310 Вт, добавочные потери Рдоб=83 Вт [Кацман М.М. Электрические машины. М.: Высш. школа, 1990, страницы 164, 165]. Постоянные потери Р0=Рм+Рмех=265+123=388 Вт. Переменные потери РкY=Рэ1+Рэ2+Pдоб=931+310+83=1324 Вт.
Граничный коэффициент загрузки

Таким образом, для работы данного двигателя с наибольшим КПД при его загрузке до 48,2% от номинальной мощности обмотку статора следует включать по схеме «звезда», при загрузке свыше 48,2% от номинальной мощности - по схеме «треугольник». Номинальный ток двигателя

При снижении тока двигателя до граничного значения Iгр=βгр⋅Uн=0,482⋅32,5=15,7А обмотку статора включают на схему «звезда», при повышении нагрузки выше данного значения обмотку статора включают на схему «треугольник».
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для повышения энергоэффективности асинхронного электропривода | 2020 |
|
RU2748215C1 |
| АСИНХРОННЫЙ СВАРОЧНЫЙ ГЕНЕРАТОР | 2017 |
|
RU2673566C1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО И ГАРАНТИРОВАННОГО ЭЛЕКТРОСНАБЖЕНИЯ ДЛЯ НАИБОЛЕЕ ОТВЕТСТВЕННЫХ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРОЭНЕРГИИ | 2012 |
|
RU2518907C1 |
| МАШИНА ЭЛЕКТРИЧЕСКАЯ ВРАЩАЮЩАЯСЯ АСИНХРОННАЯ С РАЗДЕЛЕННОЙ СОВМЕЩЕННОЙ ОБМОТКОЙ ДЛЯ 2p = 2, z = 36 И КОЛИЧЕСТВОМ ПАРАЛЛЕЛЬНЫХ ВЕТВЕЙ a = 2 | 2020 |
|
RU2755052C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ | 2021 |
|
RU2795613C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2002 |
|
RU2243572C2 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| ОДНОФАЗНЫЙ ДВУХСКОРОСТНОЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 1992 |
|
RU2047937C1 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2662233C1 |
| МАЛОШУМНЫЙ ЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2017 |
|
RU2660442C2 |
Изобретение относится к электротехнике и может быть использовано для управления асинхронными двигателями, работающими с переменной нагрузкой. Технический результат – повышение эффективности работы асинхронного двигателя за счет работы с максимально возможным КПД на схемах «треугольник» и «звезда». Особенностью заявленного способа управления асинхронным двигателем является переключение обмотки статора из схемы «треугольник» в схему «звезда» при снижении нагрузки до граничного значения. Указанное граничное значение определяют по формуле: 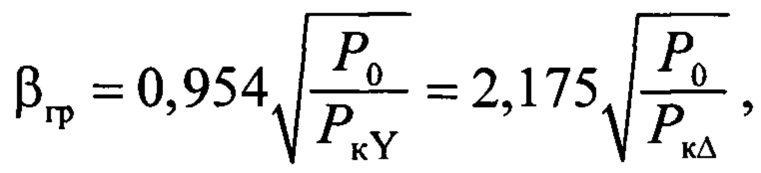 где Р0 - сумма потерь в стали и механических потерь двигателя; PкY - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «звезда»; PкΔ - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «треугольник». 1 ил.
где Р0 - сумма потерь в стали и механических потерь двигателя; PкY - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «звезда»; PкΔ - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «треугольник». 1 ил.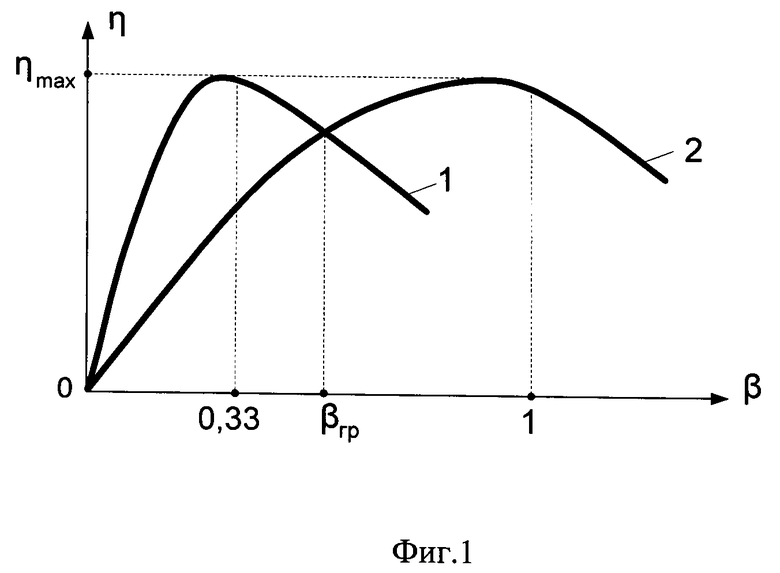
Способ управления асинхронным двигателем, заключающийся в переключении обмотки статора из схемы «треугольник» в схему «звезда» при снижении нагрузки, отличающийся тем, что граничный коэффициент загрузки определяют по формуле
где Р0 - сумма потерь в стали и механических потерь двигателя;
PкY - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «звезда»;
PкΔ - сумма потерь в меди и добавочных потерь двигателя, включенного по схеме «треугольник».
| CN 102811018 A, 05.12.2012 | |||
| WO 2012163433 A3, 06.12.2012 | |||
| DE 9418333 U1, 17.08.1995 | |||
| "Устройство для переключения статорной обмотки трехфазного асинхронного электродвигателя со схемы "Звезда" на схему "Треугольник" и обратно" | 1990 |
|
SU1750012A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРЁХФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2017 |
|
RU2735092C2 |

