Изобретение относится к области геофизических исследований, в частности, для решения задач магнитотеллурического зондирования (МТЗ) земной коры, предполагающего в качестве зондирующего (неконтролируемого) воздействия поле геомагнитных пульсаций в диапазоне частот 0.002-2 Гц, искаженное случайным влиянием сторонних шумов.
Из уровня техники известен СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ СЕЛЕКЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН С ПОСЛЕДУЮЩЕЙ ПОЛЯРИЗАЦИОННОЙ ОБРАБОТКОЙ СИГНАЛОВ (патент РФ 2720588 GO1S 3/08), относящийся к области радиотехники и обеспечивающий повышение точности определения направления прихода электромагнитной волны за счет того, что принимают ортогональные компоненты электромагнитного поля, после чего для каждого канала последовательно производят фильтрацию, усиление, оцифровку, квадратурное преобразование и перевод в частотную область посредством быстрого преобразования Фурье, а полученные комплексные компоненты используют для определения угловых координат направления прихода электромагнитной волны - азимута и угла места, и, если вычисленные значения попадают в заданные интервалы, продолжают обработку входных сигналов, а затем определяют угол собственного вращения (угол наклона большой оси эллипса), после чего производят компенсацию амплитудно-фазовых смещений, вызванных наклоном эллипса поляризации, определяют коэффициент эллиптичности и, на завершающем этапе, производят деполяризацию полезного сигнала.
Находя применение при обработке радиосигналов в многоканальных радиоприемных трактах для измерения пространственно-поляризационных параметров и деполяризации электромагнитных волн, данный способ позволяет существенно повысить соотношение сигнал-шум в системах с контролируемым источником полезного сигнала, но оказывается недостаточно эффективным при анализе поля естественных электрических шумов разной физической природы. Кроме того, в указанном диапазоне ультранизких частот (УНЧ) данный способ практически трудно реализуем.
Известно также техническое решение СПОСОБ КОМПЛЕКСНОЙ ЛОКАЦИИ ЦЕЛИ (патент РФ №2416108 G01S 13/95). Это изобретение относится к средствам определения местоположения объектов в пространстве и их исследования с использованием отраженных волн оптического и радиодиапазонов, излучаемых синхронно и с одинаковой длительностью. По известной матрице рассеяния цели или по известной матрице рассеяния подстилающей поверхности цели формируют зондирующие сигналы с переменной поляризацией и, определяя контрастность лоцируемого пространства по отраженному сигналу, изменяют поляризацию до получения сигналов максимальной контрастности цели в обоих каналах локации, по которым судят о координатах и типе цели. При этом распознавание типа цели производится только в точках пространства, локационные характеристики которых существенно отличаются от локационных характеристик подстилающей поверхности, а матрицы рассеяния меняют представленную в виде вектора Стокса поляризацию, перестраивая ее в соответствии с мгновенными изменениями измеренных параметров.
Несмотря на то, что оба рассмотренных способа используют поляризационные характеристики электромагнитного поля в системах с контролируемым источником излучения и случайными рассеивающими факторами воздействия среды, в которой это излучение распространяется, и оба ориентированы на получение максимально контрастного отношения сигнал-шум, между ними прослеживается существенное и принципиальное отличие. В рамках «Способа пространственной селекции электромагнитных волн» поляризация излучения определяется интегральным преобразованием Фурье - как правило, требуется продолжительный интервал времени, необходимый для накопления спектральной выборки [Рытов С.М. Введение в статистическую радиофизику. Часть 1. Случайные процессы. М.: Наука. Главная редакция физико-математической литературы. 1976. с. 351-359]. «Способ комплексной локации», напротив, оперирует с мгновенными (с точностью до времени срабатывания поляризаторов и фазовращателей) изменениями параметров поляризации. Для систем с контролируемым воздействием это различие не приводит к значительному ухудшению отношения сигнал-шум, если задана модель шумов, или известны рассеивающие свойства среды или объекта.
Методы теллурического зондирования [Уэйт Дж.Р. Геоэлектромагнетизм. М.: Недра. 1987. с. 155-174] принципиально исключают контролируемое воздействие на среду, предполагая в качестве зондирующего излучения поле геомагнитных пульсаций. Магнитотеллурическая установка, регистрирующая ортогональные компоненты электромагнитного поля пульсаций на земной поверхности, является только приемником неконтролируемых воздействий, что ограничивает возможность использования известных решений для анализа шумов.
Основополагающей предпосылкой использования методов МТЗ является представление поля геомагнитных пульсаций токами растекания, формируемыми в тонком ионосферном слое на высотах ~100 км над поверхностью Земли, отделенном от нее непроводящей атмосферой. Однако, как показали экспериментальные исследования [Soloviev S.P., Rybnov Yu.S., Kharlamov V.A., Krasheninnikov A.V. Acoustic gravity waves and the atmospheric electric field perturbations accompanying them. // Geomagnetism and Aeronomy, V. 57, N 3, P. 335-346. 2017] измерения теллурическими линиями электрической компоненты поля в диапазоне геомагнитных пульсаций зависят также от изменений ветровой обстановки в приземном атмосферном слое, что может приводить к снижению достоверности результатов МТЗ. Представляя распределения проводимости горных пород от глубины залегания, эти результаты фактически отображают изменения поляризации рассеянного границами областей однородной проводимости зондирующего воздействия от частоты колебаний, определяющей глубину его проникновения в толщу пород. В присутствии ветровой помехи частотно зависимые изменения поляризации также претерпевают неконтролируемые возмущения.
Известно, что компоненты электрической напряженности и магнитной индукции зондирующего воздействия допускают представление в виде серии импульсов, каждый из которых имеет вид квази гармонических импульсных откликов с почти гауссовой амплитудной огибающей после фильтрации имеющими равную длину и одинаковую ширину полосы пропускания оптимальными фильтрами с конечной импульсной характеристикой (КИХ). В рамках ограничения предлагаемого способа положим, что аддитивный вклад сторонних шумов имеет такое же представление. Из анализа амплитудно-фазового поведения фильтрованных ортогональных компонент измеренного электрического поля получается оценка общего числа импульсных воздействий, локально стационарных в моменты появления импульсов - на выборке, значительно превышающей длину фильтра, допускается произвольное распределение этих моментов, дополнительных предположений о стационарности регистрируемых компонент поля не требуется. Более тонкую оценку числа воздействий получим, используя представление о синхронном проявлении импульсов в ортогональных компонентах поля в одной и той же полосе фильтрации. В такой интерпретации стационарная связанность измеренных компонент вектора напряженности электрического поля импульса характеризуется как проявление события мгновенной поляризации.
Даже если амплитудные и фазовые значения шумовых всплесков разной физической природы имеют близкие значения в какой-либо компоненте измеренного поля, значения параметров векторов поляризации для них могут существенно отличаться. Если же и это условие не выполняется, то основой для разделения вкладов разных шумов будут служить различия в изменении параметров их поляризации по частоте и по времени, которые могут быть выявлены известными методами корреляционного и градиентного анализа.
Наиболее близким к предлагаемому техническим решением является СПОСОБ РАЗДЕЛЕНИЯ ВКЛАДОВ ГЕОМАГНИТНЫХ ПУЛЬСАЦИЙ И СТОРОННИХ ШУМОВ, представленный в работе Petlenko A.V. Analysis of the polarization of the electric-field component of high-latitude pulsations of the Pel range in the coastal zone. // Geomagnetism and Aeronomy, V. 61, N 2, P. 191-200. 2021.
Способ включает:
измерение теллурических полей не менее чем на двух градиентных станциях и цифровую регистрацию ортогональных компонент поля геомагнитных пульсаций;
осуществление полосовой фильтрации ортогональных компонент с использованием близких по частоте равнополосных оптимальных фильтров с КИХ одинаковой длины такое, что фильтрованные компоненты представляются в виде динамической системы или многомерного временного ряда;
анализ шумов фильтрованных компонент, в рамках представлений о естественной связанности «компонент поля - векторах поляризации» для каждой градиентной линии с определением амплитуды и ориентации напряженности поля импульсного воздействия;
для этого по каждым пяти последовательным измерениям фильтрованных ортогональных компонент поля строят кривую второго порядка и отбирают эллипсы, удовлетворяющие прогностическому критерию;
проверяют их соответствие критерию достоверности и получают эллипсы мгновенной поляризации, для которых однозначно определяются габаритные размеры, параметры сдвига и угол поворота. Каждому набору параметров приписывают определенный момент времени (события мгновенной поляризации);
вводят зависящую от размера окна биннинга функцию плотности событий мгновенной поляризации - для каждой градиентной линии и каждого канала фильтрации получают плотности распределения шумов во времени (оценивают их уровень и направление поляризации);
применяют градиентные методы сопоставления плотностей событий мгновенной поляризации, выделяя пространственно однородные синхронные по времени появления события генерации геомагнитных пульсаций;
определяют долговременные корреляции плотности событий мгновенной поляризации в разных каналах фильтрации за вычетом событий генерации геомагнитных пульсаций -тем самым находят спектральное распределение плотности сторонних шумов.
Известным Способом разделения вкладов геомагнитны пульсаций и сторонни шумов на примере конкретных измерений поля производят разделение вкладов и оценку уровней электромагнитных шумов различной природы. Определяют структуру и спектральный состав шумов. В представленных результатах работы выявлена высокая корреляция разностных функций плотности событий мгновенной поляризации в некоторых частотных каналах с непосредственно измеряемыми характеристиками сторонних шумов (направлением ветра). Так же отмечено, что при значительном усилении ветра характер этой зависимости становится не столь однозначным. Кроме того, следует отметить, что указанные разностные функции, как результат градиентного сопоставления плотностей событий мгновенной поляризации на разных станциях, сами по себе не являются функциями плотности, поскольку эти события даже в одних и тех же частотных каналах фиксируются в разные моменты времени.
Решаемая техническая задача предполагает оперативное повышение достоверности результатов МТЗ путем отбраковки (неконтролируемых) шумов различной физической природы в измеряемых градиентными теллурическими линиями компонентах электрического поля на разных частотах за счет уточнения градиентных методов сопоставления плотностей событий мгновенной поляризации, которое достигается с помощью последовательной (итерационной) взвешенной корректировки функций плотности.
Решение поставленной задачи осуществляется следующим образом. Не менее чем на двух градиентных станциях осуществляют измерение и цифровую регистрацию ортогональных компонент поля геомагнитных пульсаций. После этого их подвергают полосовой фильтрации и осуществляют анализ шумов, фиксируемых каждой станцией. Для этого по значениям каждых пяти последовательных измерений фильтрованных компонент поля строят кривую второго порядка и отбирают эллипсы мгновенной поляризации, удовлетворяющие критериям прогностичности и достоверности. Для отобранных эллипсов однозначно определяют габаритные размеры, параметры сдвига и угол поворота. Каждому выбранному набору параметров приписывают определенный момент времени, соответствующий моменту мгновенной поляризации. Далее определяют разностные функции плотности событий мгновенной поляризации, исходя из определенной плотности распределения шумов во времени для каждой градиентной станции и каждого частотного канала фильтрации. После этого выделяют пространственно однородные синхронные по времени события генерации геомагнитных пульсаций. Предлагаемое решение отличается от известного тем, что после определения разностных функций плотности событий мгновенной поляризации определяют взвешенные пороги корректировки плотности событий мгновенной поляризации. При этом исключают события, приводящие к превышению установленных порогов. Затем проверяют условие превышения скорректированными значениями плотности событий мгновенной поляризации заданного уровня сходимости. Далее, при наличии превышения заданного уровня сходимости, возвращаются к определению разностных скорректированных значений плотности событий мгновенной поляризации и формированию обновленных порогов, учитывающих долю исключенных событий. Процесс возобновления корректировки функций плотности (с исключением шумовых событий), переопределения разностных функций (градиентов) и обновление порогов продолжают до достижения заданного уровня сходимости. После этого делают вывод о завершении процесса отбраковки шумов.
Техническое решение иллюстрируется следующим графическим материалом:
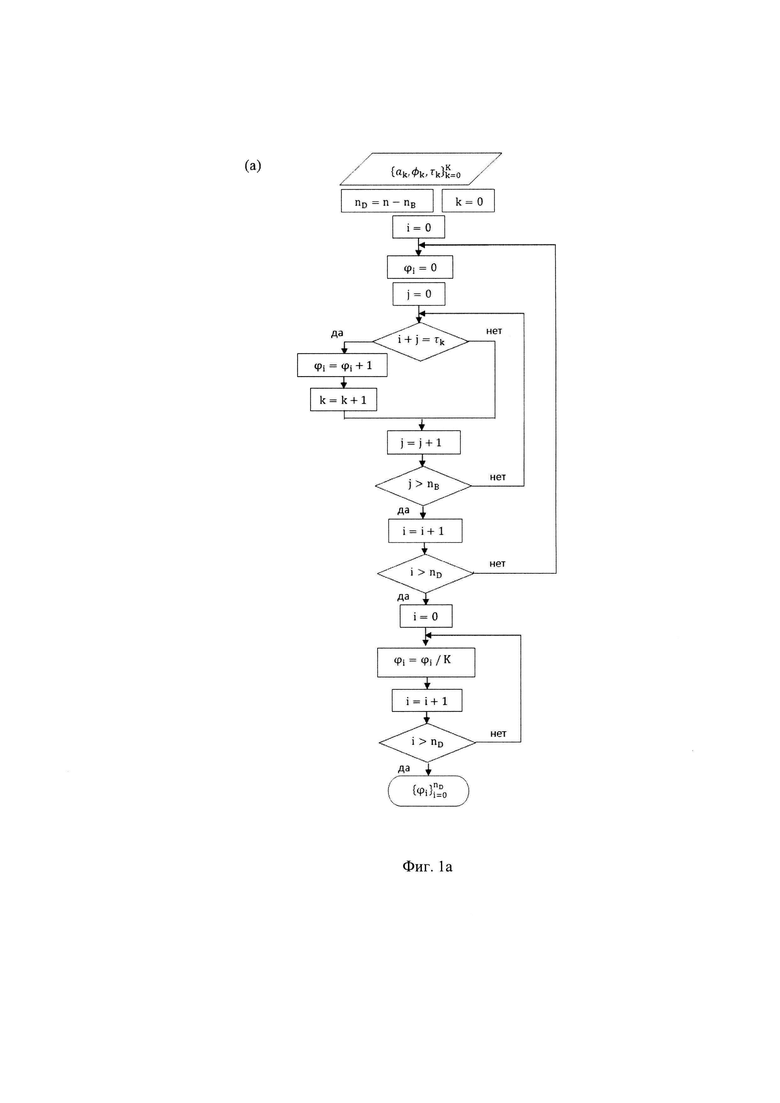
Фиг. 1а Алгоритм процедуры вычисления значений функции плотности событий мгновенной поляризации.
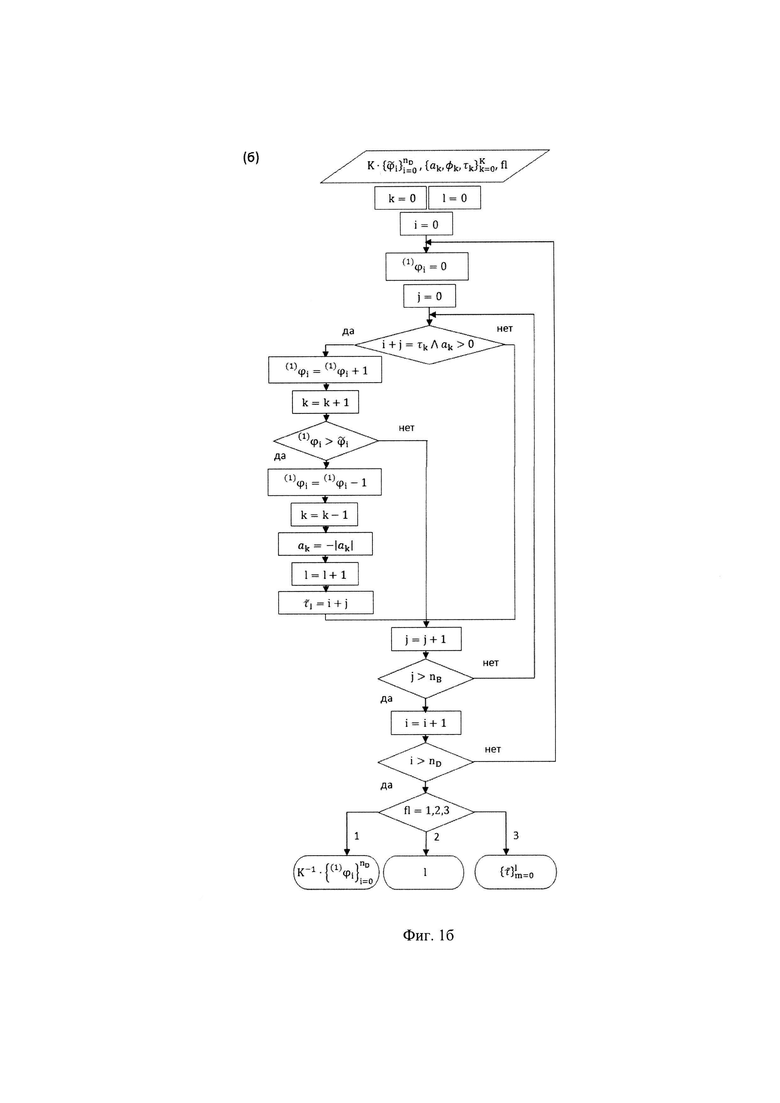
Фиг. 1б Алгоритм процедуры вычисления значений скорректированной функции плотности событий мгновенной поляризации.
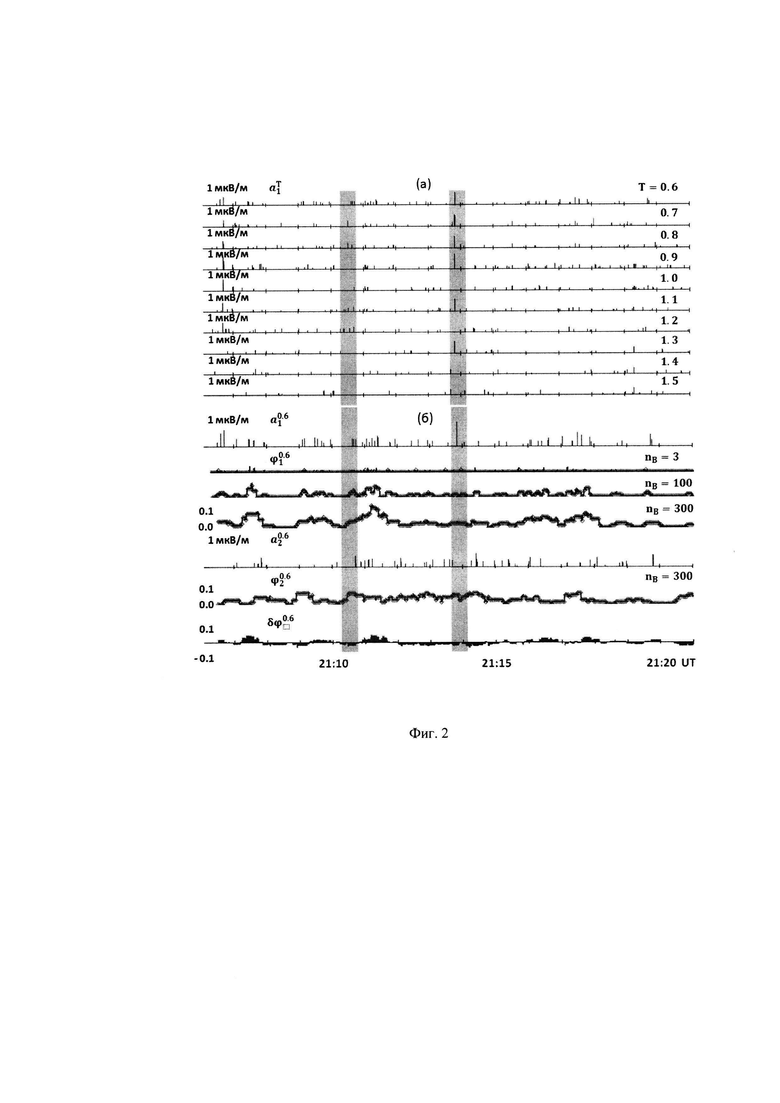
Фиг. 2а Амплитуды событий мгновенной поляризации в разных частотных каналах теллурической станции 1. Фиг. 2б Амплитуды мгновенной поляризации для периода фильтрации 0,6 с теллурической станции 1.
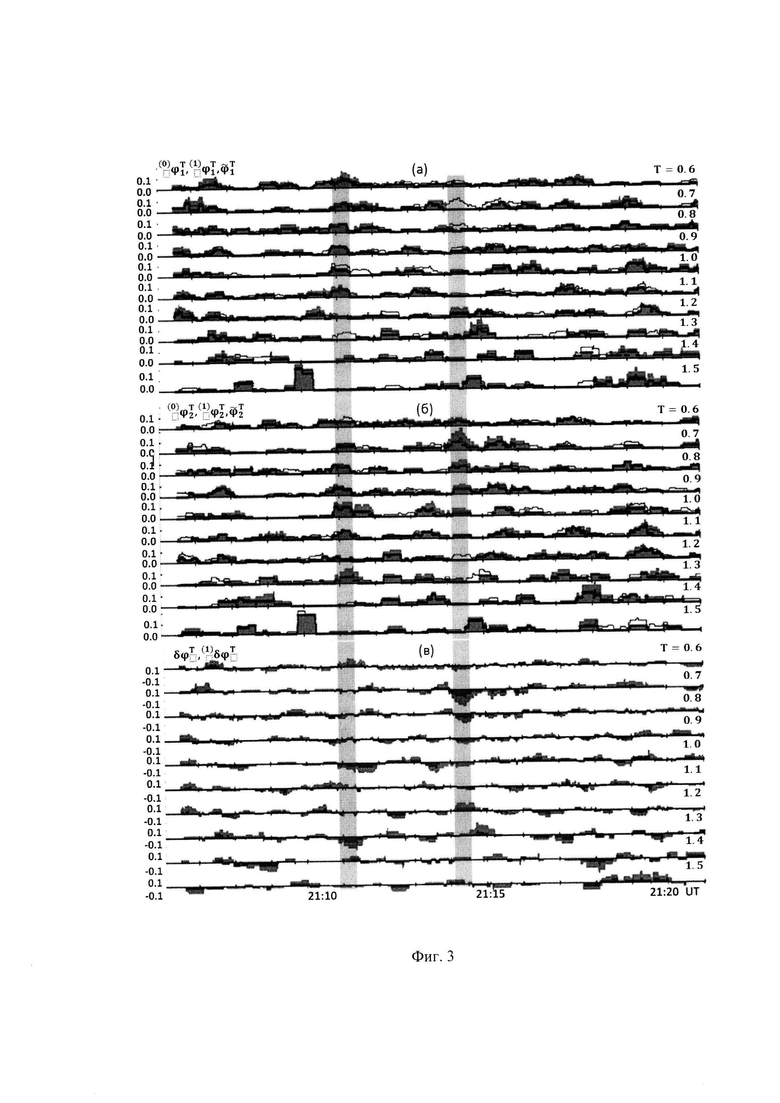
Фиг. 3а Плотности событий поляризации в разных частотных каналах теллурической станции 1. Фиг. 3б То же для теллурической станции 2. Фиг. 3в Разностные функции и скорректированные разности плотности событий поляризации для станций 1 и 2.
Фиг. 4 События мгновенной поляризации для периода 0,6 с теллурической станции 1 до и после первой итерации.
Динамику осуществления предлагаемого технического решения представим на примере конкретной реализации. Способ отбраковки шумов при магнитотеллурическом зондировании осуществляют следующим образом.
1. Измеряют напряженности электрического поля не менее чем на двух градиентно-установленных теллурических линиях с расстоянием между заземляющими электродами не превышающим 10 LE, где длина линий LE~50 м. Тем самым достигается однородность поля зондирующего воздействия.
2. Оцифровку измеренных компонент производят с частотой, достаточной для представления волновых форм пульсаций на верхней границе УНЧ диапазона. Приемлемой для наших целей является частота дискретизации 10 Гц.
3. Полосовую фильтрацию осуществляют оптимальными фильтрами КИХ равной длины (nf=40). Набор из 10 фильтров, отличающихся периодами фильтрации на 0.1 с, перекрывает диапазон пульсаций Pel в полосе частот 0.6-1.6 Гц. В компьютерной симуляции способа фильтрация компонент поля, фиксируемого градиентными станциями, реализуется последовательно.
4. Для выделения импульсных возмущений поля время определения параметров поляризации по выборочным измерениям фильтрованных в одной полосе частот ортогональных компонент поля должно быть минимизировано. По теореме Паскаля любая кривая второго порядка может быть построена по координатам пяти точек на плоскости. Построение квадратичной формы по пяти последовательным значениям фильтрованных ортогональных компонент напряженности электрического поля позволяет реализовать максимально быстрый способ построения кривой поляризации, чтобы ее можно было бы трактовать как мгновенную также как в принятом способе-прототипе.
Коэффициенты αik квадратичной формы

где ех и еу фильтрованные компоненты, определяют по формулам

в которых А1; А2, …А6 являются минорами в разложении по первой строке определителя матрицы
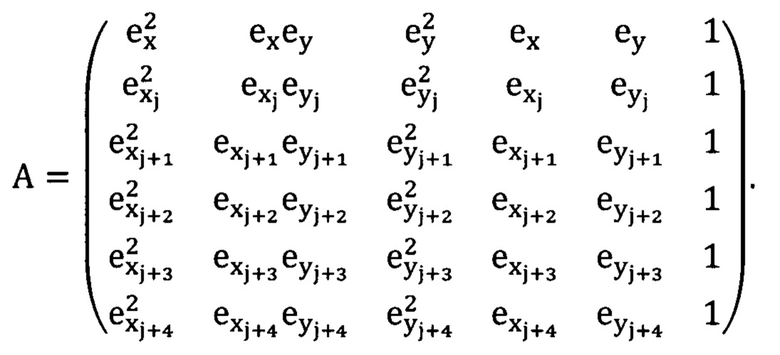
Здесь ех., еу.- значения фильтрованных компонент в момент времени j,
 - в момент j+1 и т.д.
- в момент j+1 и т.д.
Три величины 
 и
и  инвариантны относительно сдвига и поворота осей и посредством характеристического уравнения квадратичной формы
инвариантны относительно сдвига и поворота осей и посредством характеристического уравнения квадратичной формы

корни λ1 и λ2 которого удовлетворяют соотношениям λ1+λ2=I1 и λ1λ2=I2, определяют тип кривой. Чтобы построенная кривая была кривой поляризации (эллипсом), необходимо, чтобы выполнялись условия I2≥0 и 
Если  или (α12=0, α11=α22), поляризация становится круговой.
или (α12=0, α11=α22), поляризация становится круговой.
В случае эллиптической кривой большая полуось эллипса определяется как  малая - как
малая - как 
угол наклона большой полуоси эллипса (направление поляризации) относительно направления ех - как 
Сдвиг центра эллипса относительно начала координат по осям х и у определяется формулами  и
и 
Для выборки объема n можно построить n-5 кривых второго порядка. Кривые, не являющиеся эллипсами, характеризуют нестационарность (переходные процессы неустановившихся) колебаний в фильтрованных компонентах поля и/или нестационарную связанность этих компонент.
а) Переходные процессы в фильтрованных компонентах напряженности электрического поля могут приводить к значительным (более (0.05-0.10)а) уклонениям точек эллипса, построенного, например, по измерениям в моменты времени j…j+4, от измерений поля в моменты времени j+5, j+6… Будем считать, что построенный эллипс поляризации обладает хорошими прогностическими характеристиками, если заданный уровень уклонения сохраняется в течение, как минимум j+5…j+9 измерений, что соответствует периоду времени, не более чем в 1,5 раза отличающегося от периода фильтрации. При выборе уровня уклонения меньшем, чем 0,05 а, число выявленных событий мгновенной поляризации оказывается недостаточным для последующего разделения шумов, а при уклонении, превышающем 0,1а, структура шумов значительно усложняется наличием переходных процессов. Уровень уклонения точек эллипса задают в зависимости от решаемой задачи.
б) Эллипс с хорошими прогностическими характеристиками будет считаться недостоверным, если его большая полуось а отличается от измеряемых значений модуля  (где ех, еу - значения фильтрованных компонент напряженности электрического поля), более чем на заданный уровень уклонения.
(где ех, еу - значения фильтрованных компонент напряженности электрического поля), более чем на заданный уровень уклонения.
в) Для трехкомпонентных измерений поля критерием отбора эллипсов поляризации установившихся колебаний является также сохранение нормали плоскости поляризации (соприкасающейся плоскости 3-мерной кривой, построенной по фильтрованным в общей полосе измерениям компонент поля) в пределах заданного телесного угла на интервале времени заданной продолжительности.
Эллипсом мгновенной (моментальной) поляризации считают эллипс, построенный по минимальному количеству измерений ортогональных компонент поля и удовлетворяющий условиям а) прогностичности, б) достоверности и в) принадлежности плоскости поляризации для 3-х мерных измерений, например, магнитных компонент поля).
Параметрами мгновенной поляризации являются большая и малая полуоси, смещения центра эллипса относительно начала координат, направление поляризации φ и момент начала построения τ. В случае (почти) линейной поляризации используют главный набор параметров [α, φ, τ]к - модуль α, направление поляризации φ и момент τ, трактуемый также как момент события поляризации. Экспериментальная проверка предлагаемого Способа отбраковки шумов при МТЗ показывает, что на выборочных реализациях фильтрованных значений поля в присутствии сторонних шумов выявленные события мгновенной поляризации образуют дискретное множество, объем которого составляет не более 10-20% объема выборки. В компьютерной симуляции способа определение событий мгновенной поляризации производят последовательно по всем частотным каналам каждой из градиентных теллурических станций.
5. Для каждого дискретного множества событий поляризации строят функции плотности событий поляризации  (как функции шумовых событий от времени) на выборке объемом nD=n-nв, где nв - размер, так называемого окна биннинга (скользящего окна, в пределах которого суммируется число событий), на практике выбираемого достаточно большим (n≥≥nв≥≥nf). Функции
(как функции шумовых событий от времени) на выборке объемом nD=n-nв, где nв - размер, так называемого окна биннинга (скользящего окна, в пределах которого суммируется число событий), на практике выбираемого достаточно большим (n≥≥nв≥≥nf). Функции  нормируют на число событий поляризации
нормируют на число событий поляризации  составляющих данное множество. В компьютерной симуляции определение производят последовательно по всем частотным каналам (индексируемым значением периода фильтрации Т) каждой из градиентных теллурических станций (индексируют номером s). Алгоритм вычисления
составляющих данное множество. В компьютерной симуляции определение производят последовательно по всем частотным каналам (индексируемым значением периода фильтрации Т) каждой из градиентных теллурических станций (индексируют номером s). Алгоритм вычисления  представлен на фиг. 1а. Функции плотности вычисляются по заданному массиву структур {α, φ, τ}k, определяющих параметры этих событий. Для каждого частотного канала каждой теллурической станции в пределах заданной выборки объема n размерность этого массива К известна. Плотности φ рассчитываются на выборке объема nD=n-nв с окном биннинга nв и нормируются значениями К. События поляризации, показанные на фиг. 2а ненулевыми значениями
представлен на фиг. 1а. Функции плотности вычисляются по заданному массиву структур {α, φ, τ}k, определяющих параметры этих событий. Для каждого частотного канала каждой теллурической станции в пределах заданной выборки объема n размерность этого массива К известна. Плотности φ рассчитываются на выборке объема nD=n-nв с окном биннинга nв и нормируются значениями К. События поляризации, показанные на фиг. 2а ненулевыми значениями  суммируют в пределах скользящего окна размером nв. Для событий
суммируют в пределах скользящего окна размером nв. Для событий  на фиг. 2б приведены результаты вычислений при разных nв. Для событий
на фиг. 2б приведены результаты вычислений при разных nв. Для событий  - результаты вычислений при nв=300. Числа и моменты событий поляризации в одном и том же частотном канале разных станций отличаются. При уменьшении nв значения плотности компактифицируются вблизи одиночных событий поляризации (пульсаций).
- результаты вычислений при nв=300. Числа и моменты событий поляризации в одном и том же частотном канале разных станций отличаются. При уменьшении nв значения плотности компактифицируются вблизи одиночных событий поляризации (пульсаций).
6. Для пары градиентных теллурических станций s1 и s2 в каждом частотном канале находят разностные функции плотности событий поляризации  В силу однородности поля геомагнитных пульсаций функции
В силу однородности поля геомагнитных пульсаций функции  характеризуют относительные изменения плотности сторонних шумов, фиксируемых этими станциями. Знакопеременные функции
характеризуют относительные изменения плотности сторонних шумов, фиксируемых этими станциями. Знакопеременные функции  не являются функциями плотности. Разностная функция
не являются функциями плотности. Разностная функция  показана на фиг. 2б.
показана на фиг. 2б.
7. Для станции s1 определяют порог коррекции (виртуальную пороговую функцию) плотности событий поляризации, относящихся к полю пульсаций  где qsl - весовой множитель, 0<qsl<1. Функция
где qsl - весовой множитель, 0<qsl<1. Функция  показывает относительное увеличение событий поляризации поля пульсаций в общем количестве импульсных возмущений поля на станции si за вычетом предполагаемой доли qsl сторонних шумов. Функция
показывает относительное увеличение событий поляризации поля пульсаций в общем количестве импульсных возмущений поля на станции si за вычетом предполагаемой доли qsl сторонних шумов. Функция  знакоположительна, но также не может быть истолкована, как функция плотности. Тем не менее, вместо определенной в п. 5 функции
знакоположительна, но также не может быть истолкована, как функция плотности. Тем не менее, вместо определенной в п. 5 функции  она может служить порогом ограничения плотности событий поляризации геомагнитных пульсаций на станции s1. Аналогично вводится функция
она может служить порогом ограничения плотности событий поляризации геомагнитных пульсаций на станции s1. Аналогично вводится функция 
8. Чтобы получить скорректированную плотность событий поляризации поля пульсаций  изменяют правило расчета функции плотности событий поляризации, определенных в п. 5 так, чтобы при изменении значений этой функции учитывались только такие события, для которых изменение значения
изменяют правило расчета функции плотности событий поляризации, определенных в п. 5 так, чтобы при изменении значений этой функции учитывались только такие события, для которых изменение значения  оказывается строго принадлежащим интервалу
оказывается строго принадлежащим интервалу  - функция
- функция  ренормируется на известное число событий поляризации
ренормируется на известное число событий поляризации  При таком расчете часть событий поляризации игнорируется, так что число событий
При таком расчете часть событий поляризации игнорируется, так что число событий  формирующих значения
формирующих значения  не превышает исходного
не превышает исходного  . Функцию
. Функцию  нормируют значением
нормируют значением  Аналогичным образом определяют
Аналогичным образом определяют  Размер окна биннинга остается прежним. Алгоритм вычисления скорректированных функций плотности
Размер окна биннинга остается прежним. Алгоритм вычисления скорректированных функций плотности  приведен на фиг. 1б. Вычисление значений скорректированной функции плотности событий мгновенной поляризации по заданному массиву структур {α, φ, τ}k, определяющих параметры этих событий и виртуальной пороговой функции
приведен на фиг. 1б. Вычисление значений скорректированной функции плотности событий мгновенной поляризации по заданному массиву структур {α, φ, τ}k, определяющих параметры этих событий и виртуальной пороговой функции  ренормированной значением К. Отличается от представленного на фиг. 1а проверкой условия
ренормированной значением К. Отличается от представленного на фиг. 1а проверкой условия  и отбраковкой некоторых событий (α, φ, τ)k при
и отбраковкой некоторых событий (α, φ, τ)k при  Отбраковка действует как в пределах, так и за пределами процедуры. Все
Отбраковка действует как в пределах, так и за пределами процедуры. Все  нормируются значениями К. Значения флага fl=2, 3 позволяют вывести число и моменты отбракованных событий.
нормируются значениями К. Значения флага fl=2, 3 позволяют вывести число и моменты отбракованных событий.
9. Далее находят  аналогично п. 6,
аналогично п. 6,  аналогично п. 7, после чего переходят к следующей итерации определения скорректированных плотностей событий поляризации поля пульсаций
аналогично п. 7, после чего переходят к следующей итерации определения скорректированных плотностей событий поляризации поля пульсаций  аналогично п. 8.
аналогично п. 8.
10. Итерационный процесс заканчивают на шаге 1, если норма  определенная как
определенная как  не превышает наперед установленного значения 8. Сходимость процесса гарантируется выполнением
не превышает наперед установленного значения 8. Сходимость процесса гарантируется выполнением  Выбор значений qs (0<qs<1) не принципиален (хотя и влияет на скорость сходимости), хорошая сходимость обеспечивается, если на каждой итерации для обеих станций используется значение qs=1/2.
Выбор значений qs (0<qs<1) не принципиален (хотя и влияет на скорость сходимости), хорошая сходимость обеспечивается, если на каждой итерации для обеих станций используется значение qs=1/2.
Результат работы алгоритма фиг. 1б показаны на фиг. 3а, б. Серыми столбиками изображены плотности событий поляризации  На фиг. 3в разностные функции
На фиг. 3в разностные функции  (серые столбики) и скорректированные разности
(серые столбики) и скорректированные разности 
 (черные столбики). Тонкие сплошные линии на фиг. 3а, б отображают пороговые функции
(черные столбики). Тонкие сплошные линии на фиг. 3а, б отображают пороговые функции  совпадающие при qsl=qs2=1/2. Серыми полосами отмечены синхронные события поляризации, проявившиеся на начальном этапе построения (~21:14) и после первой итерации (~21:11). Очевидно,
совпадающие при qsl=qs2=1/2. Серыми полосами отмечены синхронные события поляризации, проявившиеся на начальном этапе построения (~21:14) и после первой итерации (~21:11). Очевидно,  То есть на интервалах времени, где
То есть на интервалах времени, где  разность плотностей
разность плотностей  а там, где
а там, где  функция
функция  Здесь
Здесь  - корректирующие пороги плотности событий поляризации, действующие при суммировании скорректированных значений плотности
- корректирующие пороги плотности событий поляризации, действующие при суммировании скорректированных значений плотности  как ограничители числа событий в каждый момент времени j. На интервалах времени, где
как ограничители числа событий в каждый момент времени j. На интервалах времени, где  значения
значения  просто не смогут превысить значений
просто не смогут превысить значений  полученных на начальной итерации, а там, где
полученных на начальной итерации, а там, где  ограничения со стороны
ограничения со стороны  будут эффективно уменьшать число событий
будут эффективно уменьшать число событий  до
до  Более того, за счет исключения некоторых событий поляризации возможно уменьшение каких-то значений
Более того, за счет исключения некоторых событий поляризации возможно уменьшение каких-то значений  на последующем интервале
на последующем интервале  Поэтому скорректированные функции плотности (черный жирный пунктир на фиг. 3а, б) на каждом последующем шаге итерации нигде не превышают значений, полученных на предыдущем шаге. То же справедливо и в отношении разностей
Поэтому скорректированные функции плотности (черный жирный пунктир на фиг. 3а, б) на каждом последующем шаге итерации нигде не превышают значений, полученных на предыдущем шаге. То же справедливо и в отношении разностей  (черные столбики на рис. 3в) и
(черные столбики на рис. 3в) и  Что и доказывает сходимость алгоритма (п. 10).
Что и доказывает сходимость алгоритма (п. 10).
Менее строгое обоснование получим для результата сходимости. Серыми вертикальными полосами на фиг. 2 и 3 показаны синхронные события поляризации, полученные при экспериментальной проверке и описанные в прототипе, были отнесены к событиям генерации геомагнитных пульсаций. Заметим, что эти события, четко фиксируемые на одной из градиентных станций, на другой станции могут проявиться не столь явно. То есть множества событий поляризации на обеих станциях могут существенно отличаться как числом событий, так и моментами их появления (поэтому функции  определенные на объединении множеств, не могут рассматриваться как плотности). Построенный итерационный процесс перемешивает события между разными станциями, что позволяет использовать пространственную однородность поля пульсаций, или более равномерное распределение сторонних шумов, представленных ветровой помехой, на выборочном интервале. Из сопоставления событий поляризации (фиг. 4), представленных в виде
определенные на объединении множеств, не могут рассматриваться как плотности). Построенный итерационный процесс перемешивает события между разными станциями, что позволяет использовать пространственную однородность поля пульсаций, или более равномерное распределение сторонних шумов, представленных ветровой помехой, на выборочном интервале. Из сопоставления событий поляризации (фиг. 4), представленных в виде  и формирующих
и формирующих  и событий
и событий  формирующих скорректированную плотность
формирующих скорректированную плотность  видно, что события, вызывающие превышение
видно, что события, вызывающие превышение  и подлежащие исключению, преимущественно лежат за пределами интервалов, в которых наблюдаются (предположительно синхронные) события поляризации пульсаций. Исключенные (перечеркнутые накрест) события распределены на выборке равномерно. С другой стороны, после итерационных ограничений минимизация
и подлежащие исключению, преимущественно лежат за пределами интервалов, в которых наблюдаются (предположительно синхронные) события поляризации пульсаций. Исключенные (перечеркнутые накрест) события распределены на выборке равномерно. С другой стороны, после итерационных ограничений минимизация  по сравнению с
по сравнению с  'фиг. 3а, б) достигается за счет компактификации областей, отнесенных к событиям генерации пульсаций. Такая же компактификация имеет место при уменьшении размеров окна биннинга, в ультракоротком пределе формирующего плотности
'фиг. 3а, б) достигается за счет компактификации областей, отнесенных к событиям генерации пульсаций. Такая же компактификация имеет место при уменьшении размеров окна биннинга, в ультракоротком пределе формирующего плотности  и
и  в виде дискретных импульсов, синхронизованных с событиями мгновенной поляризации (фиг. 2б). Следовательно, продолжение итерационного процесса в пределе сходится к выделению одиночных событий мгновенной поляризации. Результатом итерационного процесса является указание моментов событий поляризации, для которых влияние сторонних шумов сводится к минимуму, контролируемому введенным значением 8.
в виде дискретных импульсов, синхронизованных с событиями мгновенной поляризации (фиг. 2б). Следовательно, продолжение итерационного процесса в пределе сходится к выделению одиночных событий мгновенной поляризации. Результатом итерационного процесса является указание моментов событий поляризации, для которых влияние сторонних шумов сводится к минимуму, контролируемому введенным значением 8.
Применение предложенного алгоритма обеспечивает быстродействующее оперативное определение интервалов времени, для которых применение традиционных методов обработки теллурических данных в наименьшей степени искажается влиянием сторонних шумов, и поэтому может считаться более достоверным. Быстродействие предлагаемого алгоритма обеспечивается, в том числе, использованием определения мгновенной поляризации, позволяющего в течение одного периода пульсаций оценить принадлежность события к той или иной форме импульсного возмущения для оперативной оценки его принадлежности к вполне определенному типу шумов.
В зависимости от геомагнитной возмущенности и скорости изменений ветровой обстановки число событий поляризации, вызванных тем или иным типом шумов, на градиентных станциях может отличаться, так как появление импульсных всплесков этих шумов может приводить как к возникновению, так и к взаимному погашению установившихся колебаний в фильтрованных компонентах поля. Поэтому для сопоставления функций плотности  и
и  на каждом шаге итерации (п.п. 8, 9) необходима их перенормировка.
на каждом шаге итерации (п.п. 8, 9) необходима их перенормировка.
За вычетом событий поляризации, вызванных флуктуациями поля геомагнитных пульсаций, в каждом частотном канале остаются события, или группы событий, связанных с изменениями ветровой обстановки, и разделенные промежутками времени, значительно превышающими период фильтрации. Пользуясь малостью изменения периода фильтрации соседних каналов, можно установить связь ветровых возмущений в этих каналах на уровне корреляционного запаздывания и восстановить тренд изменения частоты этих возмущений (порывов ветра) от времени.
Проверка предлагаемого Способа отбраковки шумов при магнитотеллурическом зондировании проводилась в рамках эксперимента, в котором метеоусловия проведения измерений компонент напряженности электрического поля фиксировались с дискретностью ~15 с погодной станцией AW-006, установленной вблизи одной из пар градиентных теллурических линий, в наибольшей степени подверженной влиянию ветровой помехи. На начальной стадии итерационного процесса (п. 6) разностные функции плотности событий поляризации  имели высокую (~85%) степень корреляции с изменениями направления ветра, а тренды изменений
имели высокую (~85%) степень корреляции с изменениями направления ветра, а тренды изменений  построенные для некоторых порывов ветра, хорошо согласовывались с изменениями спектральной плотности в динамических спектрах измеренных компонент напряженности электрического поля. Таким, образом, апробация показывает, что предложенный Способ отбраковки шумов при магнитотеллурическом зондировании вполне соответствует условиям выделения стационарных и стационарно связанных событий в измеряемых теллурическими линиями компонентах поля. Предлагаемый способ может быть использован в радиотехнических системах для улучшения отношения сигнал-шум в каналах связи, а также в системах активной и пассивной локации целей.
построенные для некоторых порывов ветра, хорошо согласовывались с изменениями спектральной плотности в динамических спектрах измеренных компонент напряженности электрического поля. Таким, образом, апробация показывает, что предложенный Способ отбраковки шумов при магнитотеллурическом зондировании вполне соответствует условиям выделения стационарных и стационарно связанных событий в измеряемых теллурическими линиями компонентах поля. Предлагаемый способ может быть использован в радиотехнических системах для улучшения отношения сигнал-шум в каналах связи, а также в системах активной и пассивной локации целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОРСКОЙ ЭЛЕКТРОРАЗВЕДКИ | 1991 |
|
RU2065183C1 |
| Способ измерения сигналов становления электромагнитного поля при геоэлектроразведке | 1989 |
|
SU1698867A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТУРА ЗАЛЕЖИ НЕФТИ И ГАЗА | 1983 |
|
RU1127435C |
| Электроразведочная станция | 1986 |
|
SU1402995A2 |
| СПОСОБ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2008 |
|
RU2390803C2 |
| СПОСОБ МАГНИТОТЕЛЛУРИЧЕСКОГО ЗОНДИРОВАНИЯ | 1992 |
|
RU2069877C1 |
| ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ГЕОРАЗВЕДКИ | 2010 |
|
RU2436132C1 |
| Способ поисков месторождений углеводородов на шельфе | 2016 |
|
RU2657366C2 |
| Способ обнаружения и селекции радиосигналов по комплексному поляризационному признаку | 2024 |
|
RU2840500C1 |
| СПОСОБ МАГНИТОТЕЛЛУРИЧЕСКОЙ РАЗВЕДКИ | 1990 |
|
RU1777449C |

Изобретение относится к области геофизических исследований. Сущность изобретения заключается в градиентных многочастотных компонентных измерениях теллурических полей и выявлении в них событий мгновенной поляризации с последующим разделением их на события, относящиеся к разным типам шумов на основе использования подсчета функций плотности событий поляризации в частотных каналах и оценок градиентных (разностных) и скорректированных разностных плотностей этих событий за счет применения последовательных итерационных взвешенных корректировок функций плотности. Технический результат – повышение достоверности результатов магнитотеллурического зондирования (МТЗ) земной коры. 2 з.п. ф-лы, 4 ил.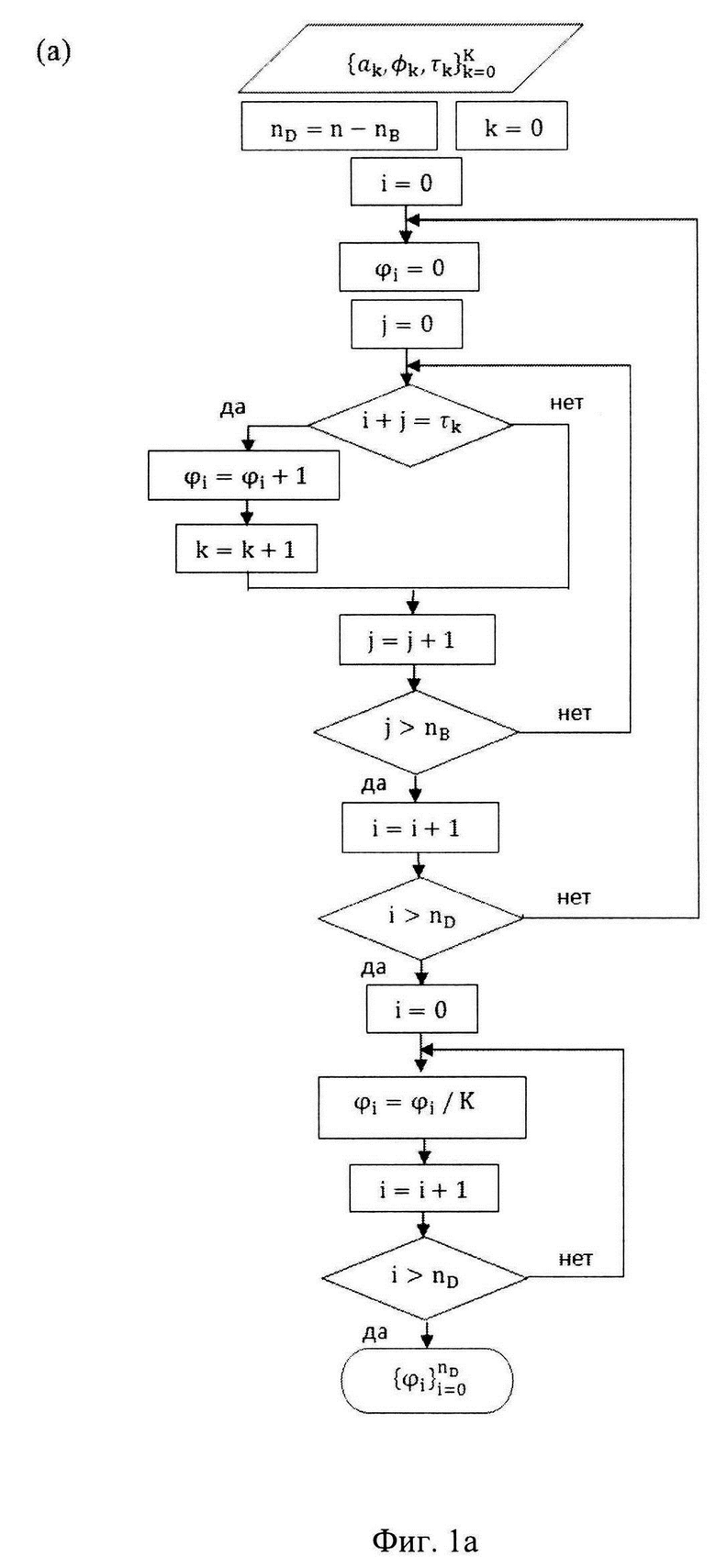
1. Способ отбраковки шумов при магнитотеллурическом зондировании, включающий измерение магнитотеллурических полей не менее чем на двух градиентных станциях и цифровую регистрацию ортогональных компонент поля геомагнитных пульсаций с последующей их полосовой фильтрацией и анализом шумов, фиксируемых каждой станцией, для чего по значениям каждых пяти последовательных измерений фильтрованных компонент поля строят кривую второго порядка и отбирают эллипсы мгновенной поляризации, удовлетворяющие критериям прогностичности и достоверности, для которых однозначно определяют габаритные размеры, параметры сдвига и угол поворота, при этом каждому набору параметров приписывают определенный момент времени, соответствующий моменту мгновенной поляризации, после чего для каждой градиентной станции и каждого канала фильтрации получают плотности распределения шумов во времени, определяют разностные функции плотности событий мгновенной поляризации и выделяют пространственно однородные синхронные по времени события генерации геомагнитных пульсаций, отличающийся тем, что после определения разностных функций плотности событий мгновенной поляризации определяют взвешенные пороги корректировки плотности событий мгновенной поляризации и, исключая события, приводящие к превышению установленных порогов, проверяют условие превышения скорректированными значениями плотности событий мгновенной поляризации заданного уровня сходимости, далее при наличии превышения, возвращаются к определению разностных скорректированных значений плотности событий мгновенной поляризации и формированию обновленных порогов, учитывающих долю исключенных событий, до достижения заданного уровня сходимости, после чего делают вывод о завершении процесса отбраковки шумов.
2. Способ по п. 1, отличающийся тем, что построенный эллипс поляризации считают соответствующим критерию прогностичности, если уровень уклонения большой полуоси эллипса а не превышает величину от 0,05а до 0,1а в течение периода времени, не более чем в 1,5 раза отличающегося от периода фильтрации.
3. Способ по п. 1, отличающийся тем, что построенный эллипс считают недостоверным, если его большая полуось а отличается от измеряемых значений модуля  (где eXj, еу - значения фильтрованных компонент напряженности электрического поля) более, чем на заданный уровень уклонения.
(где eXj, еу - значения фильтрованных компонент напряженности электрического поля) более, чем на заданный уровень уклонения.
| Петленко А.В | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Геомагнетизм и аэрономия, 2021, том 61, N 2, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
| CN 110989020 A, 10.04.2020 | |||
| СПОСОБ МАГНИТОТЕЛЛУРИЧЕСКОГО ЗОНДИРОВАНИЯ | 1992 |
|
RU2069877C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИМПЕДАНСА ЗЕМНОЙ КОРЫ В СВЕРХНИЗКОЧАСТОТНОМ ДИАПАЗОНЕ РАДИОВОЛН | 1988 |
|
SU1840791A1 |
| US 2008228401 A1, 18.09.2008. | |||

