Изобретение относится к радиотехнике и связи с использованием радиоизлучения и может быть использовано для обеспечения своевременного, достоверного и безопасного обмена мультисервисной информацией (речь, видео, передача файлов, пакетная передача данных, телеметрия, электронная почта) взаимодействующих объектов в ультракоротковолновом (УКВ) диапазоне с длинами волн от ультра высоких частот до сверхвысоких частот.
Аналогом заявляемого корабельного устройства широкополосной связи (КУШС) является оборудование системы широкополосного беспроводного доступа (ОСШБД) «Дина» ТЛВА.464412.009 (АО «Воентелеком» г. Москва), работающее на частотах 4850-6425 МГц и состоящее из беспроводного репитера, адаптера, маршрутизатора беспроводной связи, коммутатора, антенны и роутера с поддержкой ассиметричной цифровой абонентской линии ADSL или технологии быстрого мобильного интернета 4G. Недостатком данного устройства является низкая скорость передачи данных с широкой диаграммой направленности при использовании в направлении связи с подвижными объектами.
Средство широкополосной радиолинии связи «ШРС-Б» ШИВА.464416.003 (ОАО «Радиотехнический институт имени академика А.Л. Минца», г. Москва), используется для организации связи с корабля на вертолет и работает на частотах 10000-10500 МГц, состоит из блока цифрового приема-передачи бортового, антенно-электронного блока бортового приемного, антенно-электронного блока бортового передающего, автоматизированного рабочего места оператора. Недостатком данного устройства является низкая скорость передачи данных, как между вертолетами, так и при связи с кораблями.
Принимая во внимание те обстоятельства, что каждая радиостанция работает в своем диапазоне частот, на различных скоростях передачи данных и с разными помехозащищенными кодами, то встречную работу между собой они не поддерживают.
Наиболее близким для решения технической проблемы является радиостанция (PC) Р-620 с блоком широкополосных сетей ЯРИТ.464514.007 (АО «Ярославский радиозавод», г. Ярославль), работающая на частотах 1500-1750 МГц, 2412-2462 МГц и состоящая из блока коммутации и управления с вычислительным модулем, блока широкополосных сетей, блока усилителей мощности (БУМ), блока аппаратного расширения стыков, блока антенно-фидерного тракта, пульта управления. (Прототип).
Недостатком данного прототипа является то, что радиостанция работает в узком диапазоне частот, на низкой скорости передачи данных, не поддерживает встречную работу с указанными средствами широкополосного доступа.
Целью настоящего изобретения является расширение рабочего диапазона частот и функциональных возможностей устройства за счет введения новых режимов работы, позволяющих увеличить пропускную способность радиотракта, обеспечить встречную работу с другими средствами широкополосного доступа.
Поставленная цель достигается тем, что корабельное устройство широкополосной связи, содержащее приемопередающий модуль, соединенный через блок маршрутизации и управления с автоматизированным рабочим местом, и модуль питания, для запитывания модулей комплекса, при этом приемопередающий модуль включает антенну, соединенную с приемопередающими платами, соединенными с блоком коммутации, и блок определения координат, отличающееся тем, что в корабельное устройство дополнительно введены пять приемопередающих модулей, соединенных через блок маршрутизации и управления с автоматизированным рабочим местом, в каждом приемопередающем модуле антенна выполнена многодиапазонной с возможностью работы в диапазонах L, S, С и X и возможностью управления лучом диаграммы направленности, приемопередающие платы выполнены в виде модуля трансиверов и модуля цифровой обработки сигнала, блок коммутации, выполнен в виде кроссплаты, обеспечивающей соединения всех модулей приемопередающей платы и с возможностью выполнения функции коммутации сигналов управления блоком маршрутизации и сигналами частоты опорного генератора, а блок определения координат выполнен в виде телематического модуля, включающего модули ГЛОНАСС/GPS и акселерометр и обеспечивающего выдачу данных позиционирования по протоколу информационно-логического сопряжения.
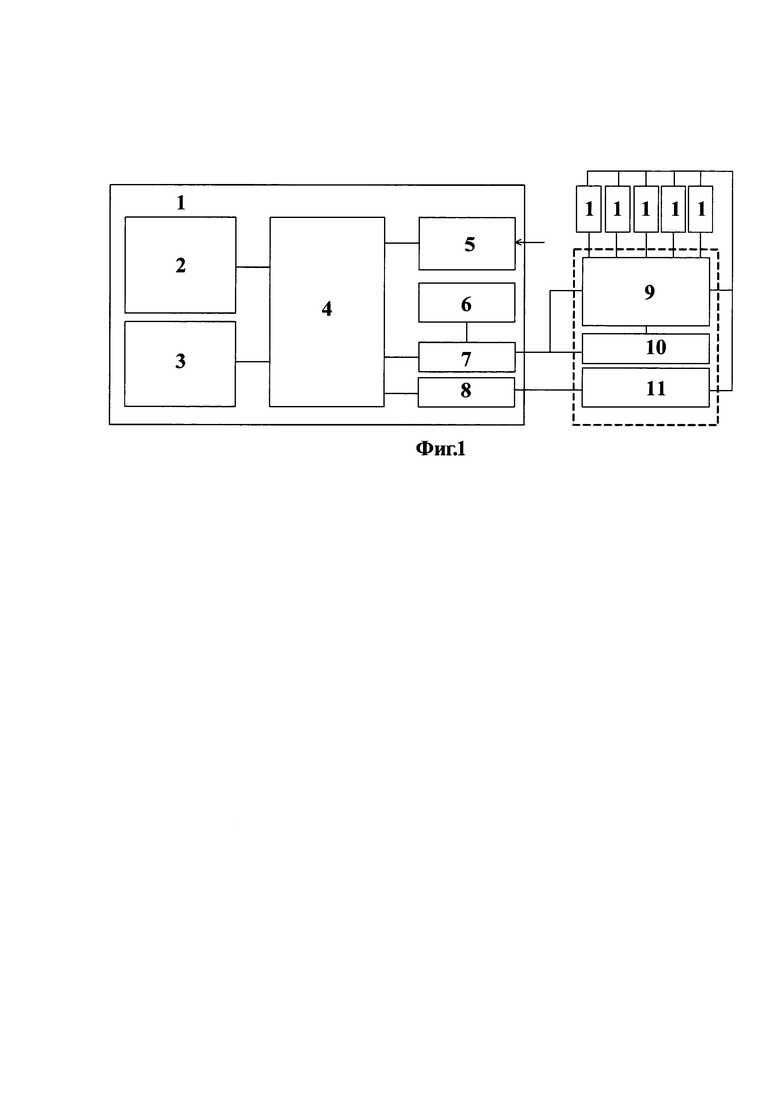
На фиг. 1 представлена функциональная схема соединений корабельного устройства широкополосной связи. Обозначения, принятые на фиг. 1:
1 - широкополосный модуль приемопередачи (ШМПП);
2 - блок антенно-электронный многодиапазонный (БАЭМ);
3 - модуль цифровой обработки сигналов (МЦОС);
4 - кроссплата (КП);
5 - модуль трансиверов (МТ);
6 - телематический модуль (ТМ);
7 - блок коммутации и опорного генератора (БКОГ);
8 - модуль электропитания (МП);
9 - блок маршрутизации и управления (БМУ);
10 - автоматизированное рабочее место автоматизированного комплекса связи (АРМ АКС);
11 - блок электропитания (БЭ).
Широкополосный модуль приемопередачи 1 является основной частью КУШС и состоит из БАЭМ, МЦОС, КП, МТ, МП, ТМ и БКОГ. Все блоки и модули объединены при помощи кроссплаты.
Блок антенно-электронный многодиапазонный 2 представляет собой активный антенный многодиапазонный приемопередающий модуль и служит для выбора частотных диапазонов, обусловленного, в первую очередь, необходимостью обеспечения взаимодействия большого количества различных объектов и включения в их состав разнообразных средств приема и передачи информации, работающих в разных частотных диапазонах. Он состоит: из приемных и передающих плат-конвертеров, обеспечивающих преобразование промежуточной частоты (ПЧ) в соответствующую рабочую частоту выбранного диапазона L (800-1200 МГц), диапазона S (2300-2600 МГц), диапазона С (5000-5500 МГц) или диапазона X (10000-10500 МГц) из приемных и передающих плат усилителей, выполняющих усиление сигналов на рабочей частоте и управление лучом диаграммы направленности (ДН) в азимутальной (±30°) и угломестной (±25°) плоскостях; из платы сопряжения и антенного полотна с излучателями, выполненного по принципу активной фазированной антенной решетки (АФАР).
Модуль цифровой обработки сигналов 3 обеспечивает управление БАЭМ 2 по интерфейсу управления RS-485, формирование стробов ПРМ/ПРД, включение соответствующего диапазона частот и управление лучом диаграммы направленности в зависимости от поставленной задачи.
Кроссплата 4 выполняет функции коммутации сигналов управления и опорного генератора частотой 100 МГц.
Модуль трансиверов 5 обеспечивает формирование выходных сигналов передатчика с необходимыми сигнально-кодовыми конструкциями (СКК) на промежуточной частоте 1550 МГц, обработку входных сигналов на ПЧ и отправку их в МЦОС 3.
Телематический модуль 6 состоит из модулей ГЛОНАСС/GPS, акселерометра, обеспечивающих определение координат, времени, курса и угла отклонения по вертикали, а также выдачу данных позиционирования по протоколу информационно-логического сопряжения.
Блок коммутации и опорного генератора 7 состоит из: коммутатора потоков Ethernet 1000 Base-T и интерфейса Ethernet 1000 Base-X (оптика); высокочастотного прецизионного малошумящего кварцевого генератора ГК219-ТС частотой 100 МГц, который служит для обеспечения высокоточным опорным колебанием МЦОС, ячейки БАЭМ и телематического модуля. Генератор высокой частоты предназначен для получения высокочастотных колебаний, частота которых удовлетворяет высоким требованиям к точности и стабильности частоты КУШС. Синтезатор преобразует частоту колебаний опорного генератора, которая обычно постоянна, в любую другую частоту, которая в данное время необходима для радиосвязи. Уровень стабильности частоты при этом преобразовании не должен существенно снижаться.
Модуль электропитания 8 обеспечивает напряжением 5 В через кроссплату всех микросхем ШМПП.
Блок маршрутизации и управления 9 обеспечивает коммутацию и управление ШМПП в варианте исполнения модуля, имеющего до шести блоков. БМУ представляет собой маршрутизатор, обеспечивающий разнесение ШМПП по разным подсетям, а также автоматический интеллектуальный выбор оптимального ШМПП, для встречной работы в радиоканале.
Автоматизированное рабочее место 10 обеспечивает удобный интерфейс пользователя для эксплуатации и управления устройством широкополосной связи.
Блок электропитания 11 обеспечивает формирование входного напряжения 27 В постоянного тока для ШМПП и БМУ от трех типов бортовой сети: напряжением 220 В (однофазной с переменным током частотой 50/400 Гц), напряжением 380 В (трехфазной с переменным током и частотой 50 Гц) и напряжением 27 В (с постоянным током).
Функционирование корабельного устройства широкополосной связи осуществляется следующим образом.
Корабельное устройство широкополосной связи предлагается использовать как связующее звено, обеспечивающее взаимодействие между подвижными объектами с помощью средств передачи данных на требуемой скорости. Основными потребителями и источниками информации, передаваемой по каналам КУШС, являются различные комплексы связи корабля, а также комплекс средств телекоммуникаций, в состав которого входят терминалы видеотелефонной связи и электронной почты. КУШС предоставляет услуги по передаче и приему:
- речи в цифровой форме (IP-телефония);
- электронной корреспонденции;
- файлов (текстовых, графических и иных);
- видео со звуковым сопровождением.
Блок электропитания устройства широкополосной связи подключается к сети 220/380 В, 50/400 Гц либо 27 В. При включении блока электропитания одновременно происходит запитывание напряжением 27 В модуля трансиверов, телематического модуля, МЦОС, БМУ, БКОГ и БАЭМ.
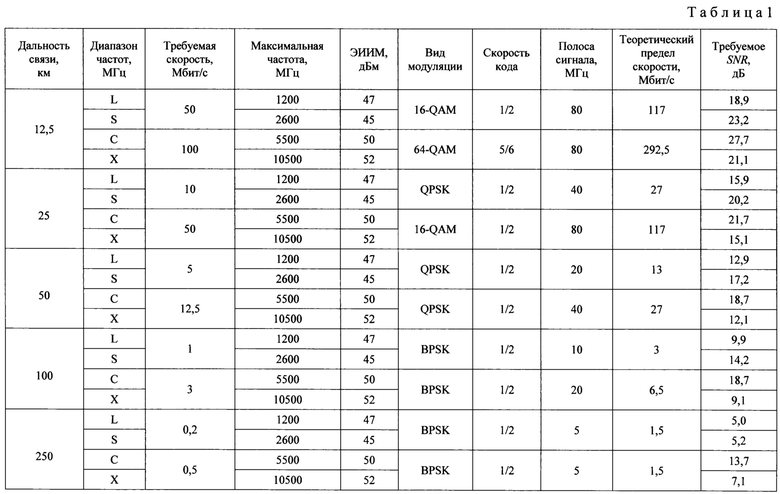
При включении в работу устройства широкополосной связи в БАЭМ производится частотное сканирование во всех диапазонах с целью сбора информации о помеховой обстановке в радиоэфире с определением оптимального для передачи данных канала, причем важно выдержать межэлементное расстояние, как правило, от 0,5λ до 0,7λ (λ - длина волны), чтобы избежать взаимного влияния излучателей и появления дифракционных максимумов при сканировании. Поскольку формирование апертуры происходит в нескольких диапазонах на одном антенном полотне, то следует выбрать частоты таким образом, чтобы сетки расположения излучателей каждого диапазона не пересекались (т.е. накладывались без коллизий). Таким образом, при кратности частот межэлементное расстояние также кратно. Поэтому размещать излучатели можно между излучателями других диапазонов на эквидистантном расстоянии, обеспечивая симметричность структуры и уменьшая взаимное влияние, в том числе отклонение ДН отдельных излучателей. С учетом этого в разрабатываемом антенном полотне: выбирается межэлементное расстояние диапазона С 35 мм (~0,6λ); излучатели диапазона S располагаются между излучателями диапазона С с шагом 70 мм (~0,6λ) со сдвигом 17,5 мм (половина шага С диапазона); излучатель (при масштабировании - излучатели) диапазона L располагается между излучателями диапазона S, равно как и между излучателями диапазона С, по центру полотна. Так как из-за линейных размеров излучателей диапазона С вызывает затруднение их размещение между излучателями диапазона X, а также повышается плотность активных элементов АФАР, апертуры диапазона X вынесены в отдельные модули. Ввиду сложности обеспечения электромагнитной совместимости АФАР и кратности частот вводится ограничение на одновременное использование нескольких диапазонов в пределах одного широкополосного модуля приемопередачи, поэтому предполагается использование в определенное время только одного диапазона. При выборе сигнально-кодовых конструкций и полосы сигнала следует учитывать факт снижения пропускной способности канала из-за увеличения дальности и, следовательно, большей траты времени на ожидание ответа. Для того чтобы КУШС могла регулировать усиление тракта по мощности, был произведен расчет требуемого отношения сигнал/шум SNR на выходе приемного устройства при условии наличия прямой оптической видимости в отсутствие дифракционных потерь.
Вычисляем частотную полосу пропускания сигнала приемного устройства по формуле
ΔF=S(1+β)(1+Vст)va,
где S - скорость передачи информации, β - коэффициент сглаживания фильтра Найквиста (0,5); Vст - объем служебного трафика (30%), v - скорость кода (1/2); а - спектральная эффективность модуляции. В данном случае для расчета отношения SNR используется модуляция с эффективностью а=1.
Определяем потери энергии сигнала дБ, на трассе распространения сигнала между антеннами объектов по формуле
L=-32,33-201g(ƒ)-201g(R)+Gr+Gt,
где ƒ - частота несущей передаваемого сигнала, МГц; R - расстояние между приемопередатчиками, км; Gt и Gr - коэффициент усиления, дБ, приемной и передающей антенн соответственно. При этом Gt=0, так как используется понятие эквивалентной изотропно-излучаемой мощности (ЭИИМ) Gr=- 4 дБ для диапазона L, Gr=9 дБ для диапазона S, Gr = 15 дБ для диапазона С, Gr=12 дБ для диапазона X.
Мощность сигнала, Вт, в точке приема определим из выражения
Pпрм=10[Pпрд+L/10]-3,
где L - величина из формулы (3), выраженная в децибелах, Рпрд - ЭИИМ передатчика, выраженная в децибелах относительно милливатта (дБм).
Минимальную мощность Р в точке приема, Вт, при которой мощность сигнала на выходе линейного тракта приемника превышает мощность шума в заданное число раз (реальная чувствительность приемника), определяем по формуле
Pпрмmin=k T ΔF Kn SNR,
где k - постоянная Больцмана = 1,38⋅10-23 Дж/К; Т - абсолютная температура приемника, °К; ΔF - полоса пропускания приемника, Гц; Kn - коэффициент шума приемника; SNR - отношение сигнал/шум на выходе линейного тракта приемника.
В качестве величины Рпрмmin принимается мощность сигнала в точке приема Рпрм; оценивается необходимое значение отношения сигнал/шум SNR. Предполагается, что величина коэффициента шума приемника Kn=3 дБ или Kп=1,99 раза.
Отношение сигнал/шум на входе линейного тракта приемника определяется по формуле
SNR=Pпрмmin/k T ΔF Kn.
Абсолютная температура Т приемника задается равной эталонной 290°К, поскольку именно эта величина является стандартной при определении коэффициента шума приемника (принята ассоциацией IEEE) и приближенной оценкой температуры приемника в большинстве каналов связи.
Требуемые параметры СКК передатчика открытой радиосвязи Open Wi-Fi, необходимого для создания КУШС, а также результаты вычислений значения отношения сигнал/шум SNR на входе линейного тракта приемника приведены в таблице 1.
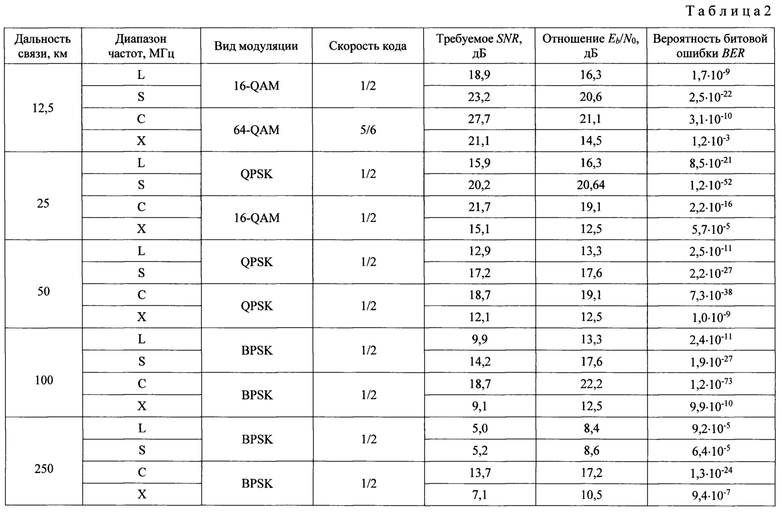
На основе данных, представленных в таблице 1, определяем вероятность битовой ошибки приема BER. Для этого рассчитываем отношение энергии сигнала, приходящейся на бит принимаемого сообщения Eb, к энергетической спектральной плотности шума N0.
Eb/N0=SNR-10lg(m)+10lg(1/v)+Ккор,
где m=log2M - коэффициент маппинга (число битов на символ информации); М - объем алфавита; Ккор - корректирующий коэффициент, учитывающий энергетические затраты при использовании LDPC-кода (0,44).
На основе значений отношения Eb/N0 производим расчет вероятности битовой ошибки BER, полученные данные представлены в таблице 2.
Из данных, приведенных в таблице 2, видно, что применение технологии открытой радиосвязи Open Wi-Fi в КУШС потенциально может обеспечить требуемые параметры дальности и скорости передачи информации. При работе с модуляциями 16-QAM, 64-QAM переведем усилитель в более линейный режим, что позволит уменьшить эквивалентную изотропно-излучаемую мощность и, соответственно, уровень SNR на входе линейного тракта приемника. Сигнал с платы сопряжения БАЭМ через кроссплату приходит в модуль трансиверов, в котором осуществляется обработка аналоговой части сигнала, выделение полезного высокочастотного сигнала и передача его в модуль цифровой обработки сигналов.
МЦОС контролирует формирование необходимых напряжений ячейками питания, собирает и обрабатывает информацию от модулей ГЛОНАСС/GPS и акселерометра, обеспечивает вычисления, обработку, формирование данных и управление ячейкой трансиверов (основной интерфейс JESD-406). В его состав входят процессор цифровой обработки сигналов, элементы аналого-цифрового интерфейса и синхронизации.
Внешний или внутренний сигнал синхронизации, сформированный процессором ЦОС (программно или с помощью таймера), переводит входное и выходное устройства выборки-хранения из режима слежения в режим хранения сигнала, с некоторой задержкой запускает аналого-цифровой преобразователь (АЦП) и переписывает выходные данные из регистра временного хранения (РВХ) в регистр выходных данных ЦАП. Процессор ЦОС сигналом синхронизации считывает регистр данных ввода-вывода АЦП, обрабатывает данные, записывает их в РВХ и ждет новый сигнал синхронизации или формирует его. Совмещенный с регистром выходных данных регистр состояния канала ввода обнуляется после ввода данных и устанавливается по завершении преобразования АЦП его выходным сигналом готовности. При синхронизации прерывания или опроса готовности регистра состояния ввод данных начинается с момента его установки, далее через блок коммутации и опорного генератора сигнал по Ethernet-стыку поступает на высокопроизводительный с низким электропотреблением одноплатный компьютер блока маршрутизации и управления. По окончании передачи данных в корабельном устройстве широкополосной связи включается режим «Служебный канал».
Известно, что в показания системы GPS могут преднамеренно вноситься ошибки. Поэтому телематический модуль должен иметь возможность независимой работы в системе как ГЛОНАСС, так и GPS.
Длины кабеля 15 м достаточно для использования его в составе КУШС мобильного и стационарного исполнения.
Автоматизированное рабочее место предоставляет оператору интерфейс управления изделием и предназначено для выполнения следующих функций:
- отображения, ввода и изменения режимов и параметров работы;
- отображения, ввода и изменения передаваемых сообщений;
- звукового оповещения о начале радиосвязи и аварийных событиях;
- обеспечения интерфейса для подключения следующих блоков: микротелефонной гарнитуры, носителя типа FLASH, печатающего устройства и пульта дистанционного управления.
Таким образом, корабельное устройство широкополосной связи, конструктивно выполненное в одном компактном блоке широкополосного модуля приемопередающего, позволяет организовать связь со всеми действующими в УКВ диапазоне средствами связи на скоростях до 100 Мбит/с. Цель изобретения, заключающаяся в расширении рабочего диапазона частот в диапазоне L (800-1200 МГц), в диапазоне S (2300-2600 МГц), в диапазоне С (5000-5550 МГц), в диапазоне X (10000-10500 МГц) и функциональных возможностей за счет введения новых режимов работы, позволяющих увеличить пропускную способность радиотракта, и обеспечении встречной работы с другими средствами широкополосного доступа достигнута.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЕЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СВЯЗИ | 2023 |
|
RU2819000C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС СВЯЗИ НАДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2548023C2 |
| НАСТРАИВАЕМАЯ ДВУХАНТЕННАЯ СИСТЕМА ДЛЯ РАБОТЫ ВО МНОЖЕСТВЕ ЧАСТОТНЫХ ДИАПАЗОНОВ | 2006 |
|
RU2395874C2 |
| КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2819306C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2019 |
|
RU2711025C1 |
| Мобильная аппаратная система подвижной связи с повышенной защитой от воздействия помех | 2022 |
|
RU2794343C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ СИСТЕМЫ ПОДВИЖНОЙ СВЯЗИ | 2015 |
|
RU2601124C1 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| Корабельный комплекс связи для кораблей 3-го и 4-го рангов и судов обеспечения | 2017 |
|
RU2685546C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СВЯЗИ И ОБМЕНА ДАННЫМИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2829898C1 |
Изобретение относится к радиотехнике и связи и может быть использовано для обеспечения обмена мультисервисной информацией. Техническим результатом является расширение рабочего диапазона частот и функциональных возможностей устройства за счет введения новых режимов работы, позволяющих увеличить пропускную способность радиотракта, обеспечить встречную работу с другими средствами широкополосного доступа. Упомянутый технический результат достигается тем, что в корабельное устройство дополнительно введены пять приемопередающих модулей, соединенных через блок маршрутизации и управления с автоматизированным рабочим местом, в каждом приемопередающем модуле антенна выполнена многодиапазонной с возможностью работы в диапазонах L, S, С и X и возможностью управления лучом диаграммы направленности, приемопередающие платы выполнены в виде модуля трансиверов и модуля цифровой обработки сигнала, блок коммутации выполнен в виде кроссплаты, обеспечивающей соединения всех модулей приемопередающей платы, и с возможностью выполнения функции коммутации сигналов управления блоком маршрутизации и сигналами частоты опорного генератора, а блок определения координат выполнен в виде телематического модуля, включающего модули ГЛОНАСС/GPS и акселерометр и обеспечивающего выдачу данных позиционирования по протоколу информационно-логического сопряжения. 1 ил., 2 табл.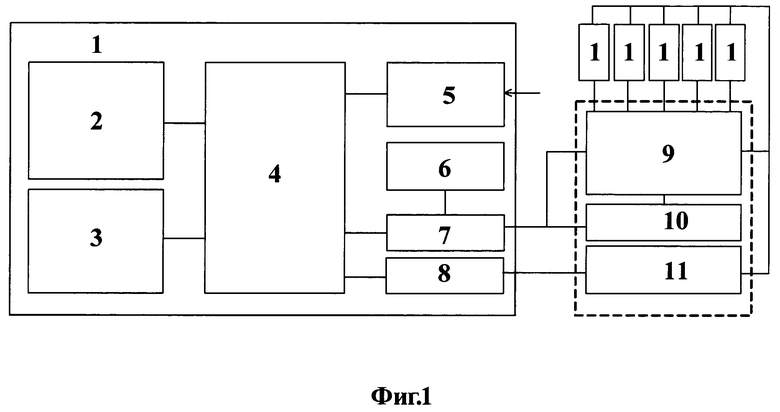
Корабельное устройство широкополосной связи, содержащее приемопередающий модуль, соединенный через блок маршрутизации и управления с автоматизированным рабочим местом, и модуль питания для запитывания модулей комплекса, при этом приемопередающий модуль включает антенну, соединенную с приемопередающими платами, соединенными с блоком коммутации, и блок определения координат, отличающееся тем, что в корабельное устройство дополнительно введены пять приемопередающих модулей, соединенных через блок маршрутизации и управления с автоматизированным рабочим местом, в каждом приемопередающем модуле антенна выполнена многодиапазонной с возможностью работы в диапазонах L, S, С и X и возможностью управления лучом диаграммы направленности, приемопередающие платы выполнены в виде модуля трансиверов и модуля цифровой обработки сигнала, блок коммутации выполнен в виде кроссплаты, обеспечивающей соединения всех модулей приемопередающей платы, и с возможностью выполнения функции коммутации сигналов управления блоком маршрутизации и сигналами частоты опорного генератора, а блок определения координат выполнен в виде телематического модуля, включающего модули ГЛОНАСС/GPS и акселерометр и обеспечивающего выдачу данных позиционирования по протоколу информационно-логического сопряжения.
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС СВЯЗИ НАДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2548023C2 |
| KR 20110033555 A, 31.03.2011 | |||
| WO 2013169756 A1, 14.11.2013 | |||
| АРХИТЕКТУРА ОБРАБОТКИ СИГНАЛОВ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2417382C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СПУТНИКОВОЙ СИСТЕМЫ СВЯЗИ И ТЕЛЕМЕТРИЧЕСКАЯ СЛЕДЯЩАЯ И УПРАВЛЯЮЩАЯ СИСТЕМА СВЯЗИ | 1990 |
|
RU2134488C1 |
