[0001] Настоящая заявка испрашивает приоритет на основании патентной заявки Китая № 2019103566536, поданной в Национальное управление интеллектуальной собственности Китая 29 апреля 2019 г. и озаглавленной «TA DETERMINING METHOD AND APPARATUS FOR TERMINAL DEVICE», которая полностью включена в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Эта заявка относится к области связи и, в частности, к способу и аппаратуре определения временного опережения (timing advance, TA) для оконечного устройства, и к системе.
УРОВЕНЬ ТЕХНИКИ
[0003] Когда оконечное (терминальное) устройство обменивается данными с устройством сети доступа (например, базовой станцией), если оконечное устройство находится далеко от устройства сети доступа, существует относительно большая задержка передачи, когда оконечное устройство отправляет данные восходящей линии связи в устройство сети доступа. Следовательно, устройство сети доступа устанавливает временное опережение (timing advance, TA) оконечного устройства. Таким образом, оконечное устройство может получить, используя TA, отрицательное смещение (negative offset) между первым временем, когда оконечное устройство принимает данные связи нисходящей линии связи устройства сети доступа, и вторым временем, когда оконечное устройство отправляет данные связи восходящей линии связи к устройству сети доступа. Следовательно, оконечное устройство может отправлять данные связи восходящей линии связи в устройство сети доступа заранее на основе TA, чтобы уменьшить задержку передачи данных связи восходящей линии связи.
[0004] В процессе произвольного доступа оконечного устройства устройство сети доступа определяет TA оконечного устройства на основе преамбулы произвольного доступа, отправленной оконечным устройством, и отправляет начальный параметр TA оконечному устройству, используя поле TAC. Следовательно, оконечное устройство может определять TA на основе начального параметра TA. После того, как оконечное устройство выполняет произвольный доступ для мобильности оконечного устройства, устройство сети доступа определяет, путем измерения данных связи восходящей линии связи оконечного устройства, регулировать TA оконечного устройства, а также отправляет параметр регулировки TA в оконечное устройство с помощью поля TAC. Следовательно, оконечное устройство может регулировать TA на основе параметра регулировки TA. Кроме того, в системе связи, например, новая технология радиодоступа в мобильных сетях 5-го поколения (5th generation Mobile Networks new radio access technology, 5G NR), диапазон регулировки каждый раз, когда устройство сети доступа регулирует TA оконечного устройства, и общий диапазон, который можно регулировать за определенный период времени, ограничен.
[0005] Однако в существующем способе определения TA учитывается только мобильность оконечного устройства. Когда устройство сети доступа является спутниковой базовой станцией, поскольку сама спутниковая базовая станция также обладает мобильностью, существующий способ определения TA для оконечного устройства не может быть напрямую применен к спутниковой базовой станции. Следовательно, как обеспечить возможность применения способа определения TA для оконечного устройства к спутниковой базовой станции - это техническая проблема, которую необходимо срочно решить в этой области.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Эта заявка предоставляет способ определения TA и аппаратуру для оконечного устройства и систему для решения проблемы, заключающейся в том, что способ определения TA для оконечного устройства в традиционной технологии не может быть применен к спутниковой базовой станции.
[0007] Согласно первому аспекту этой заявки предоставляется способ определения TA для оконечного устройства, включает в себя:
получение параметра регулировки ТА от устройства сети доступа, где параметр регулировки ТА используется для указания регулировки ТА оконечного устройства;
определение коэффициента масштабирования TA оконечного устройства, параметра разнесения поднесущих оконечного устройства и первого TA, используемого, когда оконечное устройство обменивается данными с устройством сети доступа до приема параметра регулировки TA, где коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке ТА оконечного устройства; и
определение второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA.
[0008] В заключение, в способе определения TA для оконечного устройства, представленном в этом приложении, после приема параметра регулировки TA, отправленного устройством сети доступа, и определения того, что TA оконечного устройства необходимо отрегулировать, оконечное устройство определяет коэффициент масштабирования TA, параметр разнесения поднесущих и первое TA, чтобы совместно регулировать первое TA для получения второго TA. В этом варианте осуществления параметр k регулировки TA добавляется, когда оконечное устройство определяет второе TA, так что регулируемый диапазон больше, когда оконечное устройство регулирует TA. Следовательно, TA может применяться, например, к системе спутниковой связи, чтобы регулировать TA, когда устройство перемещается, вызванное как оконечным устройством, так и спутниковой базовой станцией. Кроме того, способ определения TA для оконечного устройства в этом варианте осуществления может дополнительно применяться к существующей наземной системе связи, и оконечное устройство может регулировать TA только с учетом мобильности оконечного устройства. Следовательно, способ определения TA для оконечного устройства, предусмотренный в этом варианте осуществления, может дополнительно применяться как к наземной фиксированной базовой станции, так и к спутниковой базовой станции, и является портативным.
[0009] В варианте осуществления первого аспекта этой заявки определение второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA включает в себя: вычисление TA2 с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ.
[0010] TA1 - это первое TA, TA - параметр регулировки TA, k - коэффициент масштабирования TA, 2μ - параметр разнесения поднесущих, ∆f=2μ∙15[кГц], и Δf - разнесение поднесущих оконечного устройства.
[0011] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, второе TA вычисляется с использованием формулы, и расширение выполняется на основе существующего способа определения TA, так что способ определения TA в этом варианте осуществления является портативным и совместимым с существующей системой связи.
[0012] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA включает в себя: определение коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA.
[0013] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA, включает в себя: вычисление коэффициента k масштабирования TA с использованием формулы 2(v1+v2)/fTA/c=k∙32∙16∙64∙Tc/8).
[0014] v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, а Tc - базовая единица времени.
[0015] В варианте осуществления первого аспекта этой заявки способ дополнительно включает в себя: определение того, удовлетворяет ли регулировка TA оконечного устройства, обработанная коэффициентом масштабирования TA, предварительно установленному условию; и если регулировка ТА оконечного устройства удовлетворяет предварительно установленному условию, определение второго ТА на основе параметра регулировки ТА, коэффициента масштабирования ТА, параметра разнесения поднесущих и первого ТА.
[0016] В варианте осуществления первого аспекта этой заявки способ включает в себя: определение коэффициента масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа.
[0017] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа включает в себя:
определение, посредством поиска первого соотношения отображения, коэффициента масштабирования TA, соответствующего скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временного опережения по высоте устройства сети доступа. Первое соотношение отображения включает в себя соответствие между по меньшей мере одним из скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[0018] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа включает в себя:
определение, посредством поиска второго соотношения отображения, коэффициента масштабирования TA, соответствующего разнесению поднесущих оконечного устройства, скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа. Второе соотношение отображения включает в себя соответствие между по меньшей мере одним из разнесения поднесущих оконечного устройства, скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования ТА.
[0019] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, оконечное устройство может получить, используя меньшую величину вычисления, TA, которое необходимо отрегулировать, путем поиска соотношения отображения. Это повышает скорость и эффективность определения TA оконечным устройством.
[0020] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA включает в себя: определение коэффициента масштабирования TA на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа.
[0021] В варианте осуществления первого аспекта этой заявки определение второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA включает в себя: определение второго TA на основе параметра смещения TA, параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Параметр смещения TA используется для выполнения обработки смещения при регулировке TA оконечного устройства.
[0022] В варианте осуществления первого аспекта этой заявки определение коэффициента масштабирования TA включает в себя: определение коэффициента масштабирования TA на основе информации атрибутов устройства сети доступа.
[0023] В варианте осуществления первого аспекта этой заявки перед получением параметра регулировки TA от устройства сети доступа способ дополнительно включает в себя:
прием информации индикации, отправленной устройством сети доступа, где информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство; и
определение общей задержки на основе информации индикации.
[0024] В варианте осуществления первого аспекта этой заявки перед получением параметра регулировки TA от устройства сети доступа способ дополнительно включает в себя:
когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получение начального параметра TA от устройства сети доступа; и
определение начального TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих.
[0025] В варианте осуществления первого аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0026] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, оконечное устройство может совместно определять начальное TA оконечного устройства на основе общей задержки, указанной устройством сети доступа, и начального параметра TA. Поскольку оконечное устройство может определять начальное TA на основе общей задержки, указанной устройством сети доступа, способ определения TA для оконечного устройства может быть применен к радарной базовой станции, так что радарная базовая станция компенсирует TA оконечного устройства в зависимости от высоты радара и угла соты.
[0027] В варианте осуществления первого аспекта этой заявки, если оконечное устройство находится в статическом состоянии, определяется скорость дрейфа TA оконечного устройства, где скорость дрейфа TA используется для указания регулировки TA, которая находится в соте, в которой расположено оконечное устройство, и которая вызвана движением устройства сети доступа; и четвертое TA определяется на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих, где третье TA – это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед определением четвертого TA.
[0028] В варианте осуществления первого аспекта этой заявки определение четвертой TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих включает в себя: вычисление четвертого TA с использованием формулы TA4=TA3+∆NTA+∆N’TA∙∆t. ∆NTA=(TA-31)∙16∙64/2μ, где TA - параметр регулировки TA, отправленный устройством сети доступа, ∆N’TA - это настройка TA, Δt=t1-t0, t0 - время, в которое оконечное устройство принимает параметр регулировки TA, а t1 - время, в которое оконечное устройство должно отправлять данные связи восходящей линии связи на устройство сети доступа.
[0029] В варианте осуществления первого аспекта этой заявки определение скорости дрейфа TA оконечного устройства включает в себя: определение скорости дрейфа TA оконечного устройства согласно третьему соотношению отображения. Третье соотношение отображения включает в себя соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
[0030] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, оконечное устройство может предварительно компенсировать регулировку TA на основе параметра, например, доплеровского, чтобы избежать частых индикаций регулировки TA со стороны спутниковой базовой станции, и уменьшить накладные расходы ресурсов. Кроме того, поскольку задержка связи между спутниковой базовой станцией и оконечным устройством относительно велика, выполнение предварительной компенсации с использованием способа этого варианта осуществления может уменьшить ошибку TA, вносимую задержкой, когда спутниковая базовая станция указывает регулировать TA.
[0031] Согласно второму аспекту этой заявки предоставляется способ определения TA для оконечного устройства, включающий в себя:
определение параметра регулировки ТА оконечного устройства, где параметр регулировки ТА используется для указания регулировки ТА оконечного устройства; и
отправку параметра регулировки TA в оконечное устройство, так что оконечное устройство определяет второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства, а первое TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед приемом параметра регулировки TA.
[0032] В варианте осуществления второго аспекта этой заявки способ дополнительно включает в себя: отправку информации индикации на оконечное устройство. Информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство.
[0033] В варианте осуществления второго аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0034] В варианте осуществления второго аспекта этой заявки отправка информации индикации на оконечное устройство включает в себя: широковещательную передачу общей задержки в соте, в которой расположено оконечное устройство; или широковещательную передачу временного опережения по высоте в зоне покрытия устройства сети доступа и широковещательную передачу углового временного опережения в соте, в которой расположено оконечное устройство.
[0035] Согласно третьему аспекту этой заявки предоставляется аппаратура определения TA для оконечного устройства, выполненная с возможностью исполнения способа определения TA для оконечного устройства в первом аспекте этой заявки. Аппаратура включает в себя:
модуль приемопередатчика, выполненный с возможностью получения параметра регулировки ТА от устройства сети доступа, где параметр регулировки ТА используется для указания регулировки ТА оконечного устройства;
модуль определения параметров, выполненный с возможностью определения коэффициента масштабирования TA оконечного устройства, параметра разнесения поднесущих оконечного устройства и первого TA, используемого, когда оконечное устройство обменивается данными с устройством сети доступа перед приемом параметра регулировки TA, где коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства; и
модуль определения TA, выполненный с возможностью определения второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA.
[0036] В варианте осуществления третьего аспекта этой заявки модуль определения TA в частности выполнен с возможностью вычисления TA2 с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ.
[0037] TA1 - это первый TA, TA - параметр регулировки TA, k - коэффициент масштабирования TA, 2μ - параметр разнесения поднесущих, ∆f=2μ∙15[кГц] и Δf - разнесение поднесущих оконечного устройства.
[0038] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA.
[0039] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью вычисления коэффициента k масштабирования TA с использованием формулы 2(v1+v2)/fTA/c=k∙32∙16∙64∙Tc/8).
[0040] v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, а Tc - базовая единица времени.
[0041] В варианте осуществления третьего аспекта этой заявки модуль определения параметров дополнительно выполнен с возможностью: определять, удовлетворяет ли регулировка TA оконечного устройства, обработанная коэффициентом масштабирования TA, предварительно установленному условию; и если регулировка ТА оконечного устройства удовлетворяет предварительно установленному условию, определить второе ТА на основе параметра регулировки ТА, коэффициента масштабирования ТА, параметра разнесения поднесущих и первого ТА.
[0042] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения коэффициента масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа.
[0043] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения, посредством поиска первого соотношения отображения, коэффициента масштабирования TA, соответствующего скорости движения устройства сети доступа, высоте, на которой находится устройство сети доступа, и временного опережения по высоте устройства сети доступа. Первое соотношение отображения включает в себя соответствие между по меньшей мере одним из скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[0044] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения, посредством поиска второго соотношения отображения, коэффициента масштабирования TA, соответствующего разнесению поднесущих оконечного устройства, скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа. Второе соотношение отображения включает в себя соответствие между по меньшей мере одним из разнесения поднесущих оконечного устройства, скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования ТА.
[0045] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения коэффициента масштабирования TA на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа.
[0046] В варианте осуществления третьего аспекта этой заявки модуль определения TA дополнительно выполнен с возможностью определения второго TA на основе параметра смещения TA, параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Параметр смещения TA используется для выполнения обработки смещения при регулировке TA оконечного устройства.
[0047] В варианте осуществления третьего аспекта этой заявки модуль определения TA в частности выполнен с возможностью определения коэффициента масштабирования TA на основе информации атрибутов устройства сети доступа.
[0048] В варианте осуществления третьего аспекта этой заявки модуль приемопередатчика дополнительно выполнен с возможностью приема информации индикации, отправленной устройством сети доступа. Информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство.
[0049] В варианте осуществления третьего аспекта этой заявки модуль определения параметров в частности выполнен с возможностью определения общей задержки на основе информации индикации.
[0050] В варианте осуществления третьего аспекта этой заявки модуль приемопередатчика дополнительно выполнен с возможностью: когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получать начальный параметр TA от устройства сети доступа.
[0051] Модуль определения TA дополнительно выполнен с возможностью определения начального TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих.
[0052] В варианте осуществления третьего аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0053] В варианте осуществления третьего аспекта этой заявки модуль определения параметров дополнительно выполнен с возможностью: если оконечное устройство находится в статическом состоянии, определять скорость дрейфа TA оконечного устройства. Скорость дрейфа TA используется для указания регулировки TA, которая происходит в соте, в которой расположено оконечное устройство, и вызвана движением устройства сети доступа.
[0054] Модуль определения TA дополнительно выполнен с возможностью определения четвертого TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих. Третье TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед определением четвертого TA.
[0055] В варианте осуществления третьего аспекта этой заявки модуль определения TA дополнительно выполнен с возможностью вычисления четвертого TA с использованием формулы TA4=TA3+∆NTA+∆N’TA∙∆t. ∆NTA=(TA-31)∙16∙64/2μ, TA - параметр регулировки TA, отправленный устройством сети доступа, ∆N’TA - это регулировка TA, Δt=t1-t0, t0 - время, в которое оконечное устройство принимает параметр регулировки TA, а t1 - время, в которое оконечное устройство должно отправлять данные связи восходящей линии связи на устройство сети доступа.
[0056] В варианте осуществления третьего аспекта этой заявки модуль определения параметров дополнительно выполнен с возможностью определения скорости дрейфа TA оконечного устройства в соответствии с третьим соотношением отображения. Третье соотношение отображения включает в себя соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
[0057] Согласно четвертому аспекту этой заявки предоставляется аппаратура определения TA для оконечного устройства, выполненная с возможностью исполнения способа определения TA для оконечного устройства во втором аспекте этой заявки. Аппаратура включает в себя:
модуль определения, выполненный с возможностью определения параметра регулировки TA оконечного устройства, где параметр регулировки TA используется для указания регулировки TA оконечного устройства; и
модуль приемопередатчика, выполненный с возможностью отправки параметра регулировки TA на оконечное устройство, так что оконечное устройство определяет второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства, а первое TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед приемом параметра регулировки TA.
[0058] В варианте осуществления четвертого аспекта этой заявки модуль приемопередатчика дополнительно выполнен с возможностью отправки информации индикации на оконечное устройство. Информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство.
[0059] В варианте осуществления четвертого аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0060] В варианте осуществления четвертого аспекта этой заявки модуль приемопередатчика в частности выполнен с возможностью: широковещательной передачи общей задержки в соте, в которой расположено оконечное устройство; или широковещательной передачи временного опережения по высоте в зоне покрытия устройства сети доступа и широковещательной передачи углового временного опережения в соте, в которой расположено оконечное устройство.
[0061] Согласно пятому аспекту этой заявки предоставляется аппаратура связи. Аппаратура связи может быть оконечным устройством, и аппаратура связи включает в себя интерфейс связи, процессор и память. Интерфейс связи выполнен с возможностью получения параметра регулировки TA от устройства сети доступа и отправки параметра регулировки TA в процессор. Параметр регулировки TA используется для указания регулировки TA оконечного устройства. В памяти хранятся инструкции, и когда процессор вызывает и выполняет инструкции, после приема параметра регулировки ТА, процессор имеет возможность определять коэффициент масштабирования ТА оконечного устройства, параметр разнесения поднесущих оконечного устройства и первое ТА, используемое, когда оконечное устройство обменивается данными с устройством сети доступа до приема параметра регулировки TA. Коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства. Процессор дополнительно выполнен с возможностью определения второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA.
[0062] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью вычисления TA2 с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ.
[0063] TA1 - это первое TA, TA - параметр регулировки TA, k - коэффициент масштабирования TA, 2μ - параметр разнесения поднесущих, ∆f=2μ∙15[кГц] и Δf - разнесение поднесущих оконечного устройства.
[0064] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA.
[0065] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью вычисления коэффициента k масштабирования TA с использованием формулы 2(v1+v2)/fTA/c=k∙32∙16∙64∙Tc/8.
[0066] v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, а Tc - базовая единица времени.
[0067] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью: определять, удовлетворяет ли регулировка ТА оконечного устройства, обработанная коэффициентом масштабирования ТА, предварительно установленному условию; и если регулировка ТА оконечного устройства удовлетворяет предварительно установленному условию, определить второе ТА на основе параметра регулировки ТА, коэффициента масштабирования ТА, параметра разнесения поднесущих и первого ТА.
[0068] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения коэффициента масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа.
[0069] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения, посредством поиска первого соотношения отображения, коэффициента масштабирования TA, соответствующего скорости движения устройства сети доступа, высоте, на которой устройство сети доступа находится, и временному опережению по высоте устройства сети доступа. Первое соотношение отображения включает в себя соответствие между по меньшей мере одним из скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[0070] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения, посредством поиска второго соотношения отображения, коэффициента масштабирования TA, соответствующего разнесению поднесущих оконечного устройства, скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа. Второе соотношение отображения включает в себя соответствие между по меньшей мере одним из разнесения поднесущих оконечного устройства, скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования ТА.
[0071] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения коэффициента масштабирования TA на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа.
[0072] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью определения второго TA на основе параметра смещения TA, параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Параметр смещения TA используется для выполнения обработки смещения при регулировке TA оконечного устройства.
[0073] В варианте осуществления пятого аспекта этой заявки процессор в частности выполнен с возможностью определения коэффициента масштабирования TA на основе информации атрибутов устройства сети доступа.
[0074] В варианте осуществления пятого аспекта этой заявки интерфейс связи дополнительно выполнен с возможностью приема информации индикации, отправленной устройством сети доступа, и отправки информации индикации процессору. Информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство.
[0075] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью определения общей задержки на основе информации индикации при приеме информации индикации.
[0076] В варианте осуществления пятого аспекта этой заявки интерфейс связи дополнительно выполнен с возможностью: когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получать начальный параметр TA от устройства сети доступа и отправлять начальный параметр TA на процессор.
[0077] Процессор дополнительно выполнен с возможностью определения начального TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих при приеме начального параметра TA.
[0078] В варианте осуществления пятого аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0079] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью: если оконечное устройство находится в статическом состоянии, определять скорость дрейфа TA оконечного устройства. Скорость дрейфа TA используется для индикации регулировки TA, которая происходит в соте, в которой расположено оконечное устройство, и вызвана движением устройства сети доступа.
[0080] Процессор дополнительно выполнен с возможностью определения четвертого TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих. Третье TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед определением четвертого TA.
[0081] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью вычисления четвертого TA с использованием формулы TA4=TA3+∆NTA+∆N’TA∙∆t. ∆NTA=(TA-31)∙16∙64/2μ, TA - параметр регулировки TA, отправленный устройством сети доступа, ∆N’TA - это регулировка TA, Δt=t1-t0, t0 - время, в которое оконечное устройство принимает параметр регулировки TA, а t1 - время, в которое оконечное устройство должно отправлять данные связи восходящей линии связи на устройство сети доступа.
[0082] В варианте осуществления пятого аспекта этой заявки процессор дополнительно выполнен с возможностью определения скорости дрейфа ТА оконечного устройства в соответствии с третьим соотношением отображения. Третье соотношение отображения включает в себя соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
[0083] Согласно шестому аспекту этой заявки предоставляется аппаратура связи. Аппаратура связи может быть устройством сети доступа, а более конкретно, аппаратура связи может быть радарной базовой станцией. Аппаратура связи включает в себя интерфейс связи, процессор и память. В памяти хранятся инструкции, и когда процессор вызывает и выполняет инструкции, процессор имеет возможность определять параметр регулировки ТА оконечного устройства и отправлять параметр регулировки ТА на интерфейс связи. Параметр регулировки TA используется для указания регулировки TA оконечного устройства. При приеме параметра регулировки TA интерфейс связи отправляет параметр регулировки TA на оконечное устройство, так что оконечное устройство определяет второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства, а первое TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед приемом параметра регулировки TA.
[0084] В варианте осуществления шестого аспекта этой заявки интерфейс связи дополнительно выполнен с возможностью отправки информации индикации на оконечное устройство, где информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство.
[0085] В варианте осуществления шестого аспекта этой заявки общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[0086] В варианте осуществления шестого аспекта этой заявки интерфейс связи в частности выполнен с возможностью: широковещательной передачи общей задержки в соте, в которой расположено оконечное устройство; или широковещательной передачи временного опережения по высоте в зоне покрытия устройства сети доступа и широковещательной передачи углового временного опережения в соте, в которой расположено оконечное устройство.
[0087] Согласно седьмому аспекту вариант осуществления этой заявки дополнительно предоставляет компьютерно-читаемый носитель данных, включающий в себя инструкции. Когда инструкции выполняются на компьютере, компьютер имеет возможность выполнять способ в соответствии с первым аспектом этой заявки.
[0088] Согласно восьмому аспекту вариант осуществления этой заявки дополнительно предоставляет компьютерно-читаемый носитель данных, включающий в себя инструкции. Когда инструкции выполняются на компьютере, компьютер получает возможность выполнять способ в соответствии со вторым аспектом этой заявки.
[0089] Согласно девятому аспекту вариант осуществления этой заявки обеспечивает систему связи. Система включает в себя аппаратуру согласно третьему аспекту и аппаратуру согласно четвертому аспекту; или система включает в себя аппаратуру связи согласно пятому аспекту и аппаратуру связи согласно шестому аспекту.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0090] Фиг. 1 - схематическая диаграмма системы связи согласно традиционной технологии;
[0091] Фиг. 2 - схематическая диаграмма системы связи согласно этой заявке;
[0092] Фиг. 3 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке;
[0093] Фиг. 4 - схематическая диаграмма общей задержки соты, в которой находится оконечное устройство, в соответствии с этой заявкой;
[0094] Фиг. 5 - схематическая диаграмма местоположения спутниковой базовой станции согласно этой заявке;
[0095] Фиг. 6 - схематическая диаграмма соответствия между местоположением спутниковой базовой станции и TA оконечного устройства согласно этой заявке;
[0096] Фиг. 7 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке;
[0097] Фиг. 8 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке;
[0098] Фиг. 9 - схематическая диаграмма доплеровского сдвига частоты устройства сети доступа в соответствии с этой заявкой;
[0099] Фиг. 10 - схематическая диаграмма скорости дрейфа TA оконечного устройства в соответствии с этой заявкой;
[00100] Фиг. 11 - схематическая диаграмма определения четвертого TA оконечным устройством в соответствии с этой заявкой;
[00101] Фиг. 12 - схематическая диаграмма 1 деления соты на основе скорости дрейфа TA согласно этой заявке;
[00102] Фиг. 13 - схематическая диаграмма 2 деления соты на основе скорости дрейфа TA согласно этой заявке;
[00103] Фиг. 14 - схематическая диаграмма структуры в варианте осуществления оконечного устройства согласно этой заявке;
[00104] Фиг. 15 - схематическая диаграмма структуры в варианте осуществления устройства сети доступа согласно этой заявке; и
[00105] Фиг. 16 - схематическая диаграмма структуры в варианте осуществления устройства связи согласно этой заявке.
Описание вариантов осуществления
[00106] Фиг. 1 - схематическая диаграмма системы связи согласно традиционной технологии. Сценарий связи, показанный на фиг. 1, включает в себя оконечное устройство A, оконечное устройство B и устройство сети доступа. После установления коммуникационного соединения с устройством сети доступа оконечное устройство может дополнительно связываться с базовой сетью с помощью устройства сети доступа. Например, в примере, показанном на фиг. 1, показано, что, когда устройство сети доступа является базовой станцией E, в пределах зоны покрытия базовой станции E, как оконечное устройство A, так и оконечное устройство B могут осуществлять доступ к базовой станции E и обмениваться данными с базовой станцией E с помощью установленного беспроводного соединения. Связь включает в себя: оконечное устройство А отправляет данные связи восходящей линии связи на базовую станцию, а базовая станция отправляет данные связи восходящей линии связи на терминал.
[00107] В традиционной технологии, когда расстояние между оконечным устройством и базовой станцией относительно велико, существует относительно большая задержка передачи, когда оконечное устройство отправляет данные связи восходящей линии связи на базовую станцию, и различные задержки передачи существуют в данных связи восходящей линии связи, отправленных посредством различных оконечных устройств к базовой станции в зоне покрытия базовой станции. Например, в примере, показанном на фиг. 1, задержка передачи TA 1 существует в данных связи восходящей линии связи, отправленных оконечным устройством A на базовую станцию E, а задержка передачи TA 2 существует в данных связи восходящей линии связи, отправленных оконечным устройством B на базовую станцию E. Поскольку расстояние между оконечным устройством B и базовой станцией E больше, чем расстояние между оконечным устройством A и базовой станцией, задержка передачи TA 2 больше, чем задержка передачи TA 1. Следовательно, чтобы гарантировать временную синхронизацию данных связи восходящей линии связи оконечного устройства, принимаемых стороной базовой станции, базовая станция устанавливает временное опережение (timing advance, TA) для каждого оконечного устройства, к которому осуществляется доступ, так что оконечное устройство может получать, используя TA, отрицательное смещение (negative offset) между первым временем, когда оконечное устройство принимает данные связи нисходящей линии связи, отправленные базовой станцией, и вторым временем, когда оконечное устройство отправляет данные связи восходящей линии связи на базовую станцию. Таким образом, базовая станция управляет, управляя временем, в которое оконечное устройство, к которому осуществляется доступ, отправляет данные связи восходящей линии связи, временем, в которое базовая станция принимает данные связи восходящей линии связи оконечного устройства.
[00108] Например, в некоторых конкретных реализациях, когда оконечное устройство произвольно обращается к базовой станции, базовая станция определяет TA оконечного устройства на основе преамбулы произвольного доступа, отправленной оконечным устройством, и отправляет начальный параметр TA в оконечное устройство с помощью поля TAC, так что оконечное устройство может определять начальное TA на основе начального параметра TA. Однако из-за мобильности оконечного устройства после того, как оконечное устройство определяет начальное TA, базовой станции дополнительно необходимо постоянно указывать оконечному устройству регулировать TA оконечного устройства. После приема данных связи восходящей линии связи, отправленных оконечным устройством, базовая станция определяет, посредством измерения соответствующего параметра данных связи восходящей линии связи, регулировку ТА для регулировки ТА оконечного устройства, а также отправляет параметр регулировки ТА на оконечное устройство с помощью поля TAC, так что оконечное устройство может регулировать TA на основе параметра регулировки TA.
[00109] Фиг. 2 - схематическая диаграмма системы связи, к которой применяется эта заявка. Сценарий заявки, показанный на фиг. 2, это сценарий связи спутниковой базовой станции. Система связи включает в себя спутниковую базовую станцию и по меньшей мере одно оконечное устройство. В качестве альтернативы, в некоторых конкретных реализациях система связи, показанная на фиг. 2, дополнительно включает в себя наземную базовую станцию, которая не показана. Наземная базовая станция и спутниковая базовая станция совместно предоставляют услуги для оконечного устройства. Спутниковая базовая станция имеет более широкое покрытие и не подвержена повреждению в результате стихийных бедствий или внешних сил. Следовательно, спутниковая базовая станция может предоставлять услуги связи для некоторых областей, например океана или леса, которые не могут быть покрыты сетью наземной связи, и имеет такие особенности, как широкий охват, надежность, множественные соединения и высокая пропускная способность.
[00110] В вариантах осуществления этой заявки оконечное устройство также может называться терминалом (terminal). Оконечным устройством может быть пользовательское оборудование (user equipment, UE), мобильная станция (mobile station, MS), мобильное оконечное устройство (mobile terminal, MT) или подобное. Оконечное устройство также может быть мобильным телефоном (mobile phone), планшетным компьютером (Pad), компьютером с функцией беспроводного приемопередатчика, оконечным устройством виртуальной реальности (virtual reality, VR), оконечным устройством дополненной реальности (augmented reality, AR), беспроводным оконечным устройством в промышленном управлении (industrial control), беспроводным оконечным устройством в автономном вождении (self driving), беспроводным оконечным устройством в удаленной медицинской хирургии (remote medical surgery), беспроводным оконечным устройством в интеллектуальной сети (smart grid), беспроводным оконечным устройством в транспортной безопасности (transportation safety), беспроводным оконечным устройством в умном городе (smart city), беспроводным оконечным устройством в умном доме (smart home) и т.п.
[00111] Поскольку расстояние между оконечным устройством и спутниковой базовой станцией относительно велико, спутниковая базовая станция также должна указать каждому оконечному устройству, которое осуществляет доступ к спутниковой базовой станции, определять TA оконечного устройства, чтобы управлять временной синхронизацией данных связи восходящей линии связи оконечного устройства, принятых базовой станцией. Однако в традиционной технологии, показанной на фиг. 1, местоположение базовой станции E в наземной сети связи является фиксированным, и только мобильность оконечного устройства учитывается, когда оконечное устройство определяет TA. В системе связи, например, новая технология радиодоступа в мобильных сетях 5-го поколения (5th generation Mobile Networks new radio access technology, 5G NR), диапазон регулировки каждый раз, когда базовая станция в наземной сети связи регулирует TA оконечного устройства и общий диапазон, который можно отрегулировать за определенный период времени, ограничены.
[00112] В сценарии связи, показанном на фиг. 2, существующая спутниковая базовая станция обычно находится в состоянии непрерывного движения, например, в первый момент оконечное устройство C находится в месте C на фигуре, а спутниковая базовая станция находится в месте C’ на фигуре. В этом случае задержка передачи TA 3 возникает в данных связи восходящей линии связи, отправляемых оконечным устройством на спутниковую базовую станцию. Следовательно, оконечному устройству необходимо заранее отправить данные связи восходящей линии связи, используя временное опережение TA 3. Однако во второй момент, поскольку оконечное устройство перемещается из местоположения C в местоположение D, а спутниковая базовая станция перемещается из местоположения C’ в D’, задержка передачи ТА 4 возникает в данных связи восходящей линии связи, отправленных посредством оконечного устройства к спутниковой базовой станции. Следовательно, оконечному устройству необходимо заранее отправить данные связи восходящей линии связи, используя временное опережение TA 4. Очевидно, поскольку расстояние между местоположением D и местоположением D’ больше, чем расстояние между местоположением C и местоположением C’, TA 4 > TA 3.
[00113] Например, в системе связи 5G NR, когда оконечное устройство определяет TA, одновременно ограничиваются как частота для определения TA, так и максимальная регулировка TA, и мобильность базовой станции не учитывается. Однако в системе спутниковой связи, показанной на фиг. 2, поскольку сама спутниковая базовая станция также обладает мобильностью, а скорость движения спутниковой базовой станции намного больше, чем скорость движения оконечного устройства, существующий способ определения ТА для оконечного устройства не может быть напрямую применен к спутниковой базовой станции. Следовательно, как обеспечить возможность применения способа определения TA для оконечного устройства к спутниковой базовой станции - это техническая проблема, которую необходимо срочно решить в этой области.
[00114] Далее описывается способ определения TA для оконечного устройства, предоставляемый этой заявкой, со ссылкой на сопроводительные чертежи.
[00115] Фиг. 3 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке. Как показано на фиг. 3, способ определения TA для оконечного устройства согласно варианту осуществления этой заявки включает в себя следующие этапы.
[00116] S101: Устройство сети доступа отправляет информацию индикации на оконечное устройство.
[00117] В частности, устройство сети доступа в этом варианте осуществления включает в себя спутниковую базовую станцию. В этом случае, чтобы компенсировать значение TA при определении начального TA в процессе, в котором оконечное устройство осуществляет доступ к спутниковой базовой станции, устройство сети доступа должно отправить на оконечное устройство информацию индикации, которая может указывать на общую задержку в соте, в которой находится оконечное устройство.
[00118] Общая задержка в этом варианте осуществления включает в себя временное опережение по высоте TA(h) устройства сети доступа и угловое временное опережение TA(θ) соты, в которой расположено оконечное устройство.
[00119] Например, фиг. 4 - схематическая диаграмма общей задержки соты, в которой находится оконечное устройство, в соответствии с этой заявкой. В зоне покрытия S спутниковой базовой станции O на фиг. 4, общие задержки разных сот различны.
[00120] Сота S1 непосредственно под спутниковой базовой станцией O используется в качестве примера. Когда оконечное устройство, расположенное в точке a непосредственно под спутниковой базовой станцией O в соте, отправляет данные связи восходящей линии связи на спутниковую базовую станцию O, существует временная задержка между a и O из-за высоты h спутниковой базовой станции O. В этом варианте осуществления временная задержка обозначается как высокое временное опережение TA(h). Другими словами, когда все оконечные устройства в зоне покрытия S спутниковой базовой станции O отправляют данные связи восходящей линии связи на спутниковую базовую станцию O, по меньшей мере общая задержка существует, и необходимо выполнять компенсацию TA(h).
[00121] В дополнение к соте S1, расположенной непосредственно под спутниковой базовой станцией O, при отправке данных связи восходящей линии связи на спутниковую базовую станцию оконечное устройство в другой соте в зоне покрытия S дополнительно должно учитывать угловое временное опережение каждой соты. Например, базовая станция S2, показанная на фиг. 4, используется в качестве примера. Точка c в соте - это место, ближайшее к точке a непосредственно под спутниковой базовой станцией O. Когда оконечное устройство находится в местоположении c, существует временное опережение TA(h) по высоте, вызванное высотой h спутниковой базовой станции, и также существует угловое временное опережение TA(θ), вызванное углом θ между точкой c и спутниковой базовой станцией O. Другими словами, когда оконечное устройство в точке c отправляет данные связи восходящей линии связи на спутниковую базовую станцию O, общая задержка, которую необходимо компенсировать между c и O, включает в себя временное опережение TA(h) по высоте между O и b и угловое временное опережение TA(θ) между b и c. Следовательно, когда все оконечные устройства в соте S2 отправляют данные связи восходящей линии связи на спутниковую базовую станцию, общая задержка существует, и необходимо выполнить компенсацию общей задержки, то есть TA(h) + TA(θ).
[00122] Однако, расстояния между оконечными устройствами в соте S2 и точкой a не полностью одинаковы, и разные расстояния вызывают разные значения компенсации TA, необходимые для разных оконечных устройств в одной и той же соте. Например, точка e - это место в соте S2, наиболее удаленное от точки a. Помимо выполнения компенсации TA(h) + TA(θ) в точке e, оконечному устройству дополнительно необходимо выполнить компенсацию ΔTA на оконечном устройстве. Наконец, для оконечного устройства в соте S2 компенсация TA, требуемая радарной базовой станцией, включает в себя TA(h) + TA(θ) + ΔTA. Например, фиг. 5 - схематическая диаграмма местоположения спутниковой базовой станции согласно этому варианту осуществления, где R - радиус Земли, а h - орбитальная высота, на которой спутниковая базовая станция движется вокруг Земли. Для изменения отношения между местоположением спутниковой базовой станции и TA, когда спутниковая базовая станция движется вокруг Земли и представляет угол α с начальным местоположением, см. Фиг. 6. Фиг. 6 - соответствие между местоположением спутниковой базовой станции и TA оконечного устройства в этом приложении. Как показано на фиг. 6, для соты, находящейся в зоне покрытия спутниковой базовой станции в момент 150 с на фигуре, на высоте около 1300 км и под углом α около 0,33 рад, TA оконечного устройства в соте включает в себя TA(h) + ТА(θ) + ΔTA. Опционально, когда оконечное устройство осуществляет доступ к спутниковой базовой станции, спутниковая базовая станция отправляет ΔTA на оконечное устройство, чтобы компенсировать TA оконечного устройства.
[00123] Следовательно, на этапе S101, чтобы оконечное устройство могло определить общую задержку, которую необходимо компенсировать при обмене данными со спутниковой базовой станцией, спутниковой базовой станции необходимо отправить информацию индикации на оконечное устройство в зоне покрытия спутниковой базовой станции, потому что оконечное устройство может определять на основе информации индикации общую задержку обнаруженной соты.
[00124] Опционально, в первой возможной реализации S101 спутниковая базовая станция может широковещательно передавать в каждой соте общую задержку, соответствующую соте. Например, в сценарии, показанном на фиг. 4, спутниковая базовая станция O широковещательно передает в соте S1 общую задержку TA(h), соответствующую соте S1, и широковещательно передает в соте S2 общую задержку TA(h) + TA(θ), соответствующую соте S2.
[00125] В качестве альтернативы, во второй возможной реализации S101, поскольку все оконечные устройства в зоне покрытия S спутниковой базовой станции O имеют задержку TA(h), спутниковая базовая станция O может широковещательно передавать TA(h) в зоне покрытия S спутниковой базовой станции O и широковещательно передавать в каждой соте TA(θ), соответствующее соте.
[00126] В качестве альтернативы, в третьей возможной реализации S101 спутниковая базовая станция может указывать общую задержку обнаруженной соты оконечному устройству неявным способом индикации. Например, если существует соответствие между идентификатором соты или идентификатором луча (луча) радара спутниковой базовой станции и общей задержкой в соте, информация индикации может быть идентификатором соты или идентификатором луча, отправленным спутниковой базовой станцией к оконечному устройству, так что оконечное устройство определяет соответствующую общую задержку на основе идентификатора соты или идентификатора луча, отправленного спутниковой базовой станцией. Соответствие может быть отправлено спутниковой базовой станцией на оконечное устройство, соответствие может быть получено посредством согласования между спутниковой базовой станцией и оконечным устройством, или соответствие может быть сохранено в оконечном устройстве.
[00127] S102: Устройство сети доступа отправляет начальный параметр TA на оконечное устройство, так что оконечное устройство определяет начальный TA.
[00128] В частности, при первом доступе к устройству сети доступа оконечное устройство может получить начальный параметр TA от устройства сети доступа. Например, в процессе, в котором оконечное устройство произвольно осуществляет доступ к радарной базовой станции, радарная базовая станция отправляет начальный параметр TA на оконечное устройство, используя поле TAC (timing advance command) в ответе произвольного доступа (random access response, RAR), где начальный параметр TA включает 12 битов, а начальный параметр TA находится в диапазоне от 0 до 3846.
[00129] S103: Оконечное устройство совместно определяет начальное TA на основе информации индикации и начального параметра TA.
[00130] В частности, оконечное устройство может получить начальное TA с использованием формулы NTA0=TA(h)+TA(θ)+TA0∙16∙64/2μ, где TA(h) + TA(θ) - общая задержка, TA0 - начальный параметр TA, а 2μ - параметр разнесения поднесущих. Для параметра разнесения поднесущих ∆f=2μ∙15[кГц], где Δf - разнесение поднесущих оконечного устройства, а единица времени NTA0 равна Tc=0,509 нс, что является базовой единицей времени, определенной в стандарте TS 38.211.
[00131] S104: Оконечное устройство осуществляет связь с устройством сети доступа, используя начальное TA.
[00132] Оконечное устройство может связываться с устройством сети доступа с использованием начального TA после определения начального TA оконечного устройства посредством вышеупомянутых этапов. Например, когда устройство сети доступа является радарной базовой станцией, связь означает, что оконечное устройство должно отправить данные передачи восходящей линии связи на радарную базовую станцию за период времени TA заранее.
[00133] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, оконечное устройство может совместно определять начальное TA оконечного устройства на основе общей задержки, указанной устройством сети доступа, и начального параметра TA. Поскольку оконечное устройство может определять начальное TA на основе общей задержки, указанной устройством сети доступа, способ определения TA для оконечного устройства может быть применен к радарной базовой станции, так что радарная базовая станция компенсирует TA оконечного устройство в зависимости от высоты радара и угла соты.
[00134] Впоследствии, после того, как оконечное устройство выполняет произвольный доступ и определяет начальное TA, поскольку и оконечное устройство, и устройство сети доступа в этом варианте осуществления обладают мобильностью, оконечному устройству необходимо впоследствии непрерывно регулировать TA, чтобы соответствовать требованию TA в реальном времени. Фиг. 7 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке. Фиг.7 показывает процесс последующей регулировки TA после того, как оконечное устройство произвело произвольный доступ к устройству сети доступа и получило начальное TA. Этот вариант осуществления может быть применен к сценарию связи, показанному на фиг. 2. Устройство сети доступа представляет собой радарную базовую станцию. Способ включает следующие этапы.
[00135] S201: Устройство сети доступа отправляет параметр регулировки TA на оконечное устройство. Параметр регулировки TA используется для указания регулировки TA оконечного устройства.
[00136] В частности, в этом варианте осуществления в процессе обмена данными с оконечным устройством устройство сети доступа может измерять принятые данные связи восходящей линии связи, отправленные оконечным устройством, и при определении того, что TA оконечного устройства необходимо отрегулировать, отправлять параметр регулировки TA в оконечное устройство, так что оконечное устройство регулирует TA оконечного устройства на основе параметра регулировки TA. Опционально, на этом этапе TAC, отправленный устройством сети доступа на оконечное устройство, несет параметр регулировки TA, где параметр регулировки TA включает в себя 6 битов, а параметр регулировки TA находится в диапазоне от 0 до 63.
[00137] S202: Оконечное устройство определяет коэффициент масштабирования TA, параметр разнесения поднесущих и первое TA.
[00138] Затем, после приема параметра регулировки TA, отправленного устройством сети доступа на этапе S201, оконечное устройство решает регулировать TA. В этом случае оконечному устройству необходимо определить коэффициент масштабирования TA, параметр разнесения поднесущих и первое TA, необходимое для вычисления TA на этапе S202. Коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства. Первое TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа до получения параметра регулировки TA. Первое ТА может быть начальным ТА, или первое ТА может быть ТА, полученным после регулировки начального ТА.
[00139] S203: Оконечное устройство совместно определяет второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA.
[00140] В частности, на этом этапе оконечное устройство вычисляет TA2 с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ. TA - это параметр регулировки TA, принятый на S201, TA1 - это первый TA, определенный на S202, k - это коэффициент масштабирования TA, определенный на S202, и 2μ - параметр разнесения поднесущих, определенный на S202. Для параметра разнесения поднесущих ∆f=2μ∙15[кГц], где Δf - разнесение поднесущих оконечного устройства.
[00141] S204: Оконечное устройство осуществляет связь с устройством сети доступа с помощью второго TA.
[00142] Наконец, оконечное устройство осуществляет связь с устройством сети доступа, используя второе TA, определенное на предыдущих этапах. Связь означает, что оконечному устройству необходимо отправить данные передачи восходящей линии связи в устройство сети доступа за второй период времени TA заранее. Можно понять, что в варианте осуществления, показанном на фиг. 7, перед приемом параметра регулировки TA, отправленного устройством сети доступа на этапе S201, оконечное устройство отправляет данные передачи восходящей линии связи устройству сети доступа за первый период времени TA заранее. После определения параметра регулировки TA на этапе S203, оконечное устройство отправляет данные передачи восходящей линии связи на устройство сети доступа за второй период времени TA заранее.
[00143] В заключение, в способе определения TA для оконечного устройства, представленном в этом приложении, после приема параметра регулировки TA, отправленного устройством сети доступа, и определения того, что TA оконечного устройства необходимо отрегулировать, оконечное устройство определяет коэффициент масштабирования TA, параметр разнесения поднесущих и первое TA, чтобы совместно регулировать первое TA для получения второго TA. В этом варианте осуществления, когда оконечное устройство определяет второе TA на этапе S203, регулировка, которая может быть скорректирована на основе первого TA, представляет собой k∙(TA-31)∙16∙64/2μ. По сравнению с регулировкой (TA-31)∙16∙64/2μ, указанной в существующей системе 5G NR, добавлен параметр k регулировки TA, так что диапазон регулировки больше, когда оконечное устройство регулирует TA. Следовательно, TA может применяться к системе спутниковой связи, показанной на фиг. 2, чтобы регулировать TA в случае мобильности, вызванной как оконечным устройством, так и спутниковой базовой станцией. Кроме того, способ определения TA для оконечного устройства в этом варианте осуществления может дополнительно применяться к существующей наземной системе связи, показанной на фиг. 1, и оконечное устройство может регулировать TA только с учетом мобильности оконечного устройства. Следовательно, способ определения TA для оконечного устройства, предусмотренный в этом варианте осуществления, может дополнительно применяться как к наземной фиксированной базовой станции, так и к спутниковой базовой станции, и является портативным.
[00144] Опционально, на основе варианта осуществления, показанного на фиг.7, на этапе S202 в возможной конкретной реализации определения коэффициента k масштабирования TA оконечное устройство в частности определяет коэффициент k масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA. Например, оконечное устройство может рассчитать коэффициент k масштабирования TA по формуле 2(v1+v2)/fTA/c=k∙32∙16∙64∙Tc/8, где v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, типичное значение скорости света составляет 299792458 м/с, а Tc - базовая единица времени.
[00145] Опционально, fTA может определяться оконечным устройством на основе типа спутника устройства сети доступа, к которому осуществляется доступ, без прямого указания устройством сети доступа. Типы спутников могут быть низкоорбитальным, среднеорбитальным, высокоорбитальным и т.п., которые классифицируются спутниковой базовой станцией на основе высоты полета. Спутники, работающие на разных орбитах, имеют разные рабочие параметры и должны соответствовать разным частотам для регулировки ТА. Следовательно, после доступа к спутниковой базовой станции оконечное устройство может определить, на основе типа спутниковой базовой станции, fTA, соответствующую текущей спутниковой базовой станции. В качестве альтернативы, после определения рабочего параметра спутниковой базовой станции на основе типа спутниковой базовой станции, оконечное устройство может дополнительно определить на основе рабочего параметра fTA, соответствующую спутниковой базовой станции. Опционально, тип спутника, рабочий параметр и соответствие между рабочим параметром и fTA могут быть сохранены в устройстве сети доступа и/или оконечном устройстве в виде таблицы. В качестве альтернативы, устройство сети доступа и/или оконечное устройство может напрямую хранить таблицу, используемую для указания соответствия между типом спутника и fTA.
[00146] Значение коэффициента k масштабирования TA может быть представлено на основе максимального изменения TA, которое должно регулироваться оконечным устройством каждый раз, когда TA регулируется, и когда угол возвышения оконечного устройства максимален, когда оконечное устройство обменивается данными с устройством сети доступа и направление движения оконечного устройства противоположно направлению движения устройства сети доступа, TA, которое должно регулироваться оконечным устройством, является максимальным. Следовательно, в приведенной выше формуле необходимо учитывать сумму максимальной скорости движения оконечного устройства и скорости движения устройства сети доступа. В этом случае скорость изменения ТА максимальна. Когда устройством сети доступа является радарная базовая станция, поскольку известна рабочая высота радарной базовой станции, скорость v2 радарной базовой станции может быть вычислена с использованием формулы  . Универсальная гравитационная постоянная G=6,67*10-11 Н·м/кг, масса Земли M=5,965*1024 кг, радиус Земли R=6371 км, рабочая высота радарной базовой станции h. Высота движения h радарной базовой станции может быть получена по формуле TA(h)=2h/c, где TA(h) - это временное опережение по высоте общей задержки, отправляемой радарной базовой станцией, принятой оконечным устройством. Опционально, на этапе S203 в этом варианте осуществления после доступа к устройству сети доступа оконечное устройство может определять разнесение поднесущих, используемое во время связи оконечного устройства, и частоту, с которой устройство сети доступа указывает оконечному устройству регулировать TA. Частота для регулировки TA - это частота, с которой устройство сети доступа отправляет параметр регулировки TA на оконечное устройство, показанное на фиг. 7.
. Универсальная гравитационная постоянная G=6,67*10-11 Н·м/кг, масса Земли M=5,965*1024 кг, радиус Земли R=6371 км, рабочая высота радарной базовой станции h. Высота движения h радарной базовой станции может быть получена по формуле TA(h)=2h/c, где TA(h) - это временное опережение по высоте общей задержки, отправляемой радарной базовой станцией, принятой оконечным устройством. Опционально, на этапе S203 в этом варианте осуществления после доступа к устройству сети доступа оконечное устройство может определять разнесение поднесущих, используемое во время связи оконечного устройства, и частоту, с которой устройство сети доступа указывает оконечному устройству регулировать TA. Частота для регулировки TA - это частота, с которой устройство сети доступа отправляет параметр регулировки TA на оконечное устройство, показанное на фиг. 7.
[00147] Кроме того, на основе вышеизложенного варианта осуществления, когда оконечное устройство работает с максимальным разнесением поднесущих оконечного устройства, диапазон TA, который может быть указан параметром регулировки TA, отправленным устройством сети доступа на оконечное устройство, является минимальным. Однако коэффициент k масштабирования TA, полученный посредством вычисления с использованием вышеприведенной формулы, основан на максимальном разнесении поднесущих оконечного устройства, и, следовательно, может быть соблюдено другой разнесение поднесущих оконечного устройства. Однако, когда разнесение поднесущих уменьшается, коэффициент k масштабирования TA по-прежнему используется, и точность регулировки TA снижается до некоторой степени. Следовательно, в этом варианте осуществления может быть дополнительно определено, что диапазон регулировки TA не может быть соблюден, если коэффициент k масштабирования TA не добавлен к параметру регулировки TA. Например, определяется, соответствует ли регулировка ТА, полученная после обработки коэффициента масштабирования ТА, предварительно установленному условию. Только тогда, когда 2(v1+v2)/fTA/c > k∙32∙16∙64∙Tc/8, вышеуказанная формула может использоваться для регулировки TA. Когда 2(v1+v2)/fTA/c ≤ k∙32∙16∙64∙Tc/8, формула TA2 = TA1+k∙(TА-31)∙16∙64/2μ используется для регулировки ТА. Таким образом, когда разнесение поднесущих оконечного устройства относительно невелико, коэффициент масштабирования ТА не добавляется к регулировке ТА, а непосредственно регулируется ТА на основе регулировки ТА, чтобы повысить точность регулировки ТА оконечного устройства, когда разнесение поднесущих относительно невелико.
[00148] В другой возможной конкретной реализации определения коэффициента масштабирования TA на этапе S202, оконечное устройство в частности определяет коэффициент масштабирования TA, используя скорость движения устройства сети доступа, высоту, на которой расположено устройство сети доступа, и временное опережение по высоте устройства сети доступа. Например, оконечное устройство может определить, посредством поиска первого соотношения отображения, коэффициент масштабирования TA, соответствующий скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа, где первое соотношение отображения включает в себя соответствие между по меньшей мере одним из скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[00149] Например, оконечное устройство может хранить первое соотношение отображения в таблице. Конкретный способ конфигурации таблицы см. в таблице 1. Различные соответствия, перечисленные в таблице 1, являются просто примерами для описания, но не ограничиваются упомянутыми соответствиями. В таблице 1 частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA fTA=5, то есть TA регулируется каждые 200 мс, а максимальная скорость движения оконечного устройства составляет 1000 км/ч. Следовательно, можно понять, что если соответствие между скоростью движения другого устройства сети доступа, высотой устройства сети доступа, временным опережением по высоте устройства сети доступа и коэффициентом масштабирования TA получается из-за изменения другого параметра, например, частоты для регулировки ТА или скорости движения оконечного устройства, и если соответствие изменяется только в числовом значении, соответствие также подпадает под объем защиты этой заявки.
Таблица 1
TA(h)
[00150] Опционально, на основе варианта осуществления, показанного в таблице 1, чтобы уменьшить занимаемое пространство памяти, когда оконечное устройство сохраняет таблицу, в этом варианте осуществления высоты устройства сети доступа могут быть дополнительно классифицированы по различным уровням, и каждый уровень соответствует одному максимальному коэффициенту k масштабирования TA. Кроме того, данные в таблице могут быть дополнительно обработаны округлением в большую сторону или с точностью до 0,5, чтобы уменьшить пространство для хранения. Например, в Таблице 1.1 и Таблице 1.2 показаны два возможных способа сжатия Таблицы 1.
Таблица 1.1
(км)
TA(h)
Таблица 1.2
(км)
TA(h)
[00151] В первом соотношении отображения, показанном в таблице 1, оконечное устройство работает по умолчанию с использованием максимального разнесения поднесущих оконечного устройства. Чтобы повысить точность регулировки TA оконечным устройством, параметры k регулировки TA, соответствующие разным разнесениям поднесущих оконечного устройства, могут быть дополнительно добавлены в соответствии с первым соотношением отображения. Оконечное устройство может определить, посредством поиска второго соотношения отображения, коэффициент масштабирования TA, соответствующий разнесению поднесущих оконечного устройства, скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа, где второе соотношение отображения включает в себя соответствие между по меньшей мере одним из разнесения поднесущих оконечного устройства, скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[00152] Например, оконечное устройство может хранить второе соотношение отображения в таблице. Конкретный способ конфигурации таблицы см. в таблице 2. Различные соответствия, перечисленные в таблице 2, являются просто примерами для описания, но не ограничиваются упомянутыми соответствиями. В таблице 2 частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA fTA=5, то есть TA регулируется каждые 200 мс, а максимальная скорость движения оконечного устройства составляет 1000 км/ч. Следовательно, можно понять, что если соответствие между разнесением поднесущих, скоростью движения устройства сети доступа, высотой устройства сети доступа, временным опережением по высоте устройства сети доступа и коэффициентом масштабирования TA достигается из-за к изменению другого параметра, например, частоты для регулировки ТА или скорости движения оконечного устройства, и если соответствие изменяется только в числовом значении, соответствие также подпадает под объем защиты этой заявки.
Таблица 2
TA(h)
[00153] Аналогичным образом, на основе варианта осуществления, показанного в таблице 2, для уменьшения объема памяти, занимаемого, когда оконечное устройство сохраняет таблицу, в этом варианте осуществления высоты устройства сети доступа могут быть дополнительно классифицированы на разные уровни, и каждый уровень соответствует одному максимумальному коэффициенту k масштабирования TA. Кроме того, данные в таблице могут быть дополнительно обработаны округлением в большую сторону или с точностью до 0,5, чтобы уменьшить пространство для хранения. Например, в Таблице 2.1 и Таблице 2.2 показаны два возможных способа сжатия Таблицы 2.
Таблица 2.1
TA(h)
Таблица 2.2
TA(h)
[00154] Опционально, в третьей возможной конкретной реализации определения коэффициента k масштабирования TA на этапе S202, оконечное устройство может определять коэффициент k масштабирования TA на основе формата (format) преамбулы (preamble) произвольного доступа, используемой оконечным устройством в процессе произвольного доступа.
[00155] В процессе произвольного доступа оконечного устройства оконечное устройство отправляет преамбулу произвольного доступа к устройству сети доступа, чтобы запросить установление отношения соединения с устройством сети доступа. Для сот с разными радиусами покрытия устройства сети доступа форматы преамбул произвольного доступа, отправляемых оконечным устройством на устройство сети доступа в процессе произвольного доступа, различаются. Например, в процессе произвольного доступа оконечное устройство в соте с радиусом 5 км должно отправить преамбулу произвольного доступа в формате 1 на устройство сети доступа. Однако в процессе произвольного доступа оконечное устройство в соте с радиусом 10 км должно отправить преамбулу произвольного доступа в формате 2 на устройство сети доступа. Кроме того, диапазоны регулировки ТА для сот с разным радиусом различаются. Диапазон регулировки ТА для соты с большим радиусом больше, а диапазон регулировки ТА для соты с меньшим радиусом меньше. Следовательно, когда TA оконечного устройства определяется, может быть установлено соответствие между диапазоном регулировки TA оконечного устройства, а именно коэффициентом k масштабирования TA, и форматом преамбулы произвольного доступа, так что оконечное устройство может определить соответствующий коэффициент k масштабирования TA на основе формата преамбулы произвольного доступа, используемого в процессе произвольного доступа.
[00156] Опционально соответствие между коэффициентом k масштабирования TA и форматом преамбулы произвольного доступа может альтернативно сохраняться в устройстве сети доступа и/или оконечном устройстве в форме таблицы. Если оконечное устройство сохраняет таблицу, после определения формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа, оконечное устройство может определить соответствующий коэффициент k масштабирования TA на основе формата преамбулы произвольного доступа. Если оконечное устройство не сохраняет таблицу, в процессе произвольного доступа оконечное устройство отправляет преамбулу произвольного доступа на устройство сети доступа, и после определения соответствующего коэффициента k масштабирования TA на основе формата преамбулы произвольного доступа, устройство сети доступа может вернуть коэффициент k масштабирования TA оконечному устройству.
[00157] В частности, в вышеупомянутом варианте осуществления в процессе произвольного доступа длина циклического префикса (Cyclic Prefix, CP) формата преамбулы произвольного доступа, отправляемой оконечным устройством на устройство сети доступа, определяет возможный диапазон регулировки TA оконечного устройства. Кроме того, определяется, нужно ли вводить дополнительный коэффициент масштабирования TA, когда определяется TA, и определяется конкретное значение коэффициента масштабирования TA. Следовательно, коэффициент k масштабирования может быть определен на основе используемого формата произвольного доступа.
[00158] Коэффициент k масштабирования TA может быть определен на основе максимальной длины CP формата преамбулы произвольного доступа, сконфигурированной для соты или луча, так что значение коэффициента масштабирования TA совместно используется всей сотой или лучом. В качестве альтернативы, коэффициент k масштабирования может быть определен на основе длины CP формата преамбулы произвольного доступа, выбранного каждым пользователем (группой), так что разные пользователи могут использовать разные коэффициенты k масштабирования TA, чтобы минимизировать потерю точности, вызванную использованием коэффициента масштабирования.
[00159] Опционально, в четвертой возможной конкретной реализации определения коэффициента k масштабирования TA на этапе S202, оконечное устройство может определять разные коэффициенты k масштабирования TA на основе различных типов спутников устройства сети доступа, к которому осуществляется доступ.
[00160] Если устройство сети доступа представляет собой спутниковую базовую станцию, тип спутника может быть низкоорбитальным, среднеорбитальным, высокоорбитальным и т.п., которые классифицируются спутниковой базовой станцией на основе рабочей высоты. Спутники, работающие на разных орбитах, имеют разные рабочие параметры, поэтому необходимо установить разные коэффициенты масштабирования ТА. После доступа к спутниковой базовой станции оконечное устройство может определить тип спутниковой базовой станции, а затем определить на основе типа спутниковой базовой станции рабочий параметр, например, высоту траектории движения и общую задержку прохождения сигнала в прямом и обратном направлениях спутниковой базовой станции и, наконец, определить на основе рабочего параметра спутниковой базовой станции коэффициент масштабирования TA, соответствующий текущей спутниковой базовой станции. Опционально, тип спутника, рабочий параметр и соответствие между рабочим параметром и коэффициентом масштабирования ТА могут быть сохранены в устройстве сети доступа и/или оконечном устройстве в виде таблицы. В качестве альтернативы, устройство сети доступа и/или оконечное устройство может напрямую хранить таблицу, используемую для указания соответствия между типом спутника и коэффициентом масштабирования TA. Если оконечное устройство сохраняет таблицу, после доступа к спутниковой базовой станции оконечное устройство может напрямую определить соответствующий коэффициент масштабирования ТА из таблицы на основе типа спутниковой базовой станции.
[00161] Опционально, в вышеупомянутых вариантах осуществления этой заявки способ определения коэффициента k масштабирования TA оконечного устройства может быть согласован совместно оконечным устройством и устройством сети доступа заранее, чтобы гарантировать, что TA получено посредством вычисления посредством оконечного устройства достаточно для покрытия диапазона регулировки ТА.
[00162] Опционально, в другом варианте осуществления этой заявки, при настройке TA с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ на этапе S203, оконечное устройство может дополнительно добавить смещение параметра смещения к регулировке TA, то есть может регулировать TA с использованием формулы. TA2 = TA1+k∙(TА-31)∙16∙64/2μ+offset. Таким образом, диапазон регулировки ТА оконечного устройства еще больше расширяется. Параметр смещения может быть фиксированным значением или может быть получен с помощью функции, связанной с параметром k регулировки TA, или может быть получен с использованием функции, связанной с высотой, на которой расположено устройство сети доступа.
[00163] Кроме того, в способе определения TA для оконечного устройства, предусмотренном в вышеприведенном варианте осуществления, учитывается мобильность оконечного устройства и устройства сети доступа. Когда устройство сети доступа представляет собой спутниковую базовую станцию, поскольку траектория движения базовой спутниковой станции относительно фиксирована, когда оконечное устройство находится в статическом состоянии, закон изменения TA оконечного устройства, вызванный движением спутниковой базовой станции также фиксируется. Следовательно, если оконечное устройство получило информацию, такую как высота траектории спутниковой базовой станции и местоположение оконечного устройства, индикация спутниковой базовой станции может не потребоваться, и оконечное устройство напрямую определяет регулировку ТА, которую необходимо отрегулировать, и предварительно компенсирует TA.
[00164] В частности, фиг. 8 - схематическая блок-схема варианта осуществления способа определения TA для оконечного устройства согласно этой заявке. Способ определения ТА для оконечного устройства, показанного на фиг. 8, включает следующие этапы.
[00165] S301: Если оконечное устройство находится в статическом состоянии, определяется скорость дрейфа TA оконечного устройства, где скорость дрейфа TA используется для указания регулировки TA, которая находится в соте, в которой расположено оконечное устройство, и вызывается движением устройства сети доступа.
[00166] В конкретной реализации на этапе S301 оконечное устройство может определять скорость дрейфа TA оконечного устройства в соответствии с третьим соотношением отображения, где третье соотношение отображения включает в себя соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
[00167] Например, оконечное устройство может определять скорость дрейфа TA оконечного устройства на основе доплеровского сдвига частоты устройства сети доступа, полученного путем измерения, где соответствие DTA=-λFd, а DTA - скорость дрейфа TA, λ - длина волны сигнала беспроводной связи, отправляемого устройством сети доступа, а Fd - доплеровский сдвиг частоты. Фиг. 9 - схематическая диаграмма доплеровского сдвига частоты устройства сети доступа согласно этой заявке, а фиг. 10 - схематическая диаграмма скорости дрейфа TA оконечного устройства в соответствии с этой заявкой. На основании соответствия между фиг. 9 и фиг. 10, можно узнать, что доплеровский сдвиг частоты устройства сети доступа обратно пропорционален скорости дрейфа TA оконечного устройства.
[00168] S302: Оконечное устройство определяет четвертое ТА на основе скорости дрейфа ТА, третьего ТА, параметра регулировки ТА и параметра разнесения поднесущих, где третье ТА - ТА, используемое, когда оконечное устройство обменивается данными с устройством сети доступа перед определением четвертого ТА.
[00169] В частности, оконечное устройство может вычислить четвертое TA с использованием формулы TA4=TA3+∆NTA+∆N’TA∙∆t, где ∆NTA=(TA-31)∙16∙64/2μ, где TA - параметр регулировки TA, отправленный устройством сети доступа, ∆N’TA - регулировка TA, определенная на этапе S301, Δt=t1-t0, t0 - время, в которое оконечное устройство принимает параметр регулировки TA, и t1 - это время, в которое оконечное устройство должно отправить данные связи восходящей линии связи в устройство сети доступа.
[00170] S303: Оконечное устройство осуществляет связь с устройством сети доступа с помощью четвертого TA.
[00171] Наконец, оконечное устройство осуществляет связь с устройством сети доступа с использованием четвертого TA, определенного на предыдущих этапах, где связь означает, что оконечному устройству необходимо отправить данные передачи восходящей линии связи на устройство сети доступа за четвертый период времени TA заранее. Можно понять, что в варианте осуществления, показанном на фиг. 8, перед определением четвертого TA оконечное устройство отправляет данные передачи восходящей линии связи устройству сети доступа за третий период времени TA заранее. После определения четвертого TA на этапе S302, оконечное устройство отправляет данные передачи по восходящей линии связи устройству сети доступа за четвертый период времени TA заранее.
[00172] Например, фиг. 11 - схематическая диаграмма определения четвертого TA оконечным устройством в соответствии с этой заявкой. Как показано на фиг. 11, после того, как оконечное устройство использует для определения регулировки ТА ΔTA_1 параметр регулировки ТА, который принимается в момент t0 и который указывается спутниковой базовой станцией, и до того, как спутниковая базовая станция укажет следующий параметр регулировки ТА для определения регулировки TA ΔTA_2, оконечное устройство прогнозирует, что регулировка TA в будущем периоде времени от t0 до t1 равна ΔTA’;, вычисляет четвертое TA с использованием формулы TA4=TA3+∆TA_1+∆TA’∙(t0-t1) и использует четвертое TA для отправки данных связи восходящей линии связи на спутниковую базовую станцию в момент t1.
[00173] Опционально, после того, как оконечное устройство предварительно компенсирует TA на основе доплеровского сдвига частоты, отклонение TA все еще существует. Следовательно, спутниковая базовая станция может оценивать соответствующее отклонение ТА на основе принятого сигнала восходящей линии связи оконечного устройства и отправлять соответствующее отклонение ТА на оконечное устройство, чтобы поддерживать точность компенсации ТА оконечным устройством.
[00174] В заключение, в способе определения TA для оконечного устройства, предусмотренном в этом варианте осуществления, оконечное устройство может предварительно компенсировать регулировку TA на основе параметра, например, доплеровского, чтобы избежать частых индикаций регулировки TA со стороны спутниковой базовой станции, и уменьшить затраты ресурсов. Кроме того, поскольку задержка связи между спутниковой базовой станцией и оконечным устройством относительно велика, выполнение предварительной компенсации с использованием этого варианта осуществления может уменьшить ошибку TA, вносимую задержкой, когда спутниковая базовая станция указывает регулировать TA.
[00175] Следует отметить, что вариант осуществления, показанный на фиг. 8 может быть реализован независимо, или вариант осуществления, показанный на фиг. 8, может быть основан на варианте осуществления, показанном на фиг. 7. После того, как устройство сети доступа отправит параметр регулировки TA, чтобы позволить оконечному устройству регулировать TA, и до того, как устройство сети доступа отправит параметр регулировки TA в следующий раз, оконечное устройство может настроить TA способом, показанным на фиг. 8, без индикации от устройства сети доступа.
[00176] Опционально, в варианте осуществления, показанном на фиг. 8, в другой возможной реализации определения скорости дрейфа TA оконечного устройства на этапе S301, оконечное устройство может определять скорость дрейфа TA оконечного устройства на основе соответствия между сотой, в которой расположено оконечное устройство, и скоростью дрейфа TA. Скорость дрейфа TA, вызванная перемещением спутниковой базовой станции, связана с географическим положением оконечного устройства. Скорость дрейфа TA оконечного устройства, расположенного ближе к спутниковой базовой станции, изменяется больше, а скорость дрейфа TA оконечного устройства, расположенного дальше от спутниковой базовой станции, изменяется меньше или даже имеет тенденцию быть постоянной. Следовательно, в этом варианте осуществления спутниковая базовая станция может разделять соты на основе состояний изменения скоростей дрейфа TA и транслировать в каждой соте скорость дрейфа TA, соответствующую соте, так что оконечное устройство определяет скорость дрейфа TA после приема широковещательной передачи спутниковой базовой станции.
[00177] Например, фиг. 12 - схематическая диаграмма 1 деления соты на основе скорости дрейфа TA согласно этой заявке. В примере, показанном на фиг. 12, чтобы уменьшить ошибку компенсации TA, разные соты в зоне покрытия спутниковой базовой станции O имеют разные радиусы. Радиус соты непосредственно под спутниковой базовой станцией O минимален, а скорость дрейфа TA соты обозначается как ΔTA 1’. Скорость дрейфа TA соты дальше от спутниковой базовой станции O обозначается как ΔTA 2’. Радиус самой удаленной соты в зоне покрытия спутниковой базовой станции O является максимальным, а скорость дрейфа TA соты обозначается как ΔTA 3’.
[00178] Кроме того, в примере, показанном на фиг. 12, чтобы уменьшить затраты на сигнализацию, указывающую скорость дрейфа TA устройством сети доступа к оконечному устройству, в этом варианте осуществления скорость дрейфа TA может быть дополнительно привязана к идентификатору соты/параметру индикации устройством сети доступа в неявной индикации. Таким образом, оконечное устройство может определять на основе идентификатора соты, в которой расположено оконечное устройство, скорость дрейфа TA соты, и устройству сети доступа не нужно специально посылать скорость дрейфа TA в оконечное устройство.
Таблица 3
[00179] Например, как показано в таблице 3, оконечное устройство может хранить соотношение отображения между скоростью дрейфа TA и ID соты в таблице, где разные ID соты соответствуют разным скоростям дрейфа TA. Оконечное устройство может запрашивать таблицу на основе параметра индикации, транслируемого спутниковой базовой станцией, или обнаруженного идентификатора соты, чтобы получить конкретную скорость дрейфа TA. Когда спутниковая базовая станция на фиг. 12 движется налево на фигуре, скорости дрейфа TA слева все положительные, скорости дрейфа TA справа все отрицательные, а скорости дрейфа TA, хранящиеся в таблице 3, являются только абсолютными значениями. Следовательно, одинаковые или разные параметры индикации могут использоваться для скоростей дрейфа ТА противоположных символов. Когда параметры индикации одинаковы, оконечное устройство может определить, является ли скорость дрейфа TA положительной или отрицательной, на основе оценки доплеровского сдвига частоты спутниковой базовой станции, чтобы уменьшить пространство для хранения, занимаемое таблицей 3. Например, ТА отрицательно, когда доплеровский сдвиг частоты положительный, а ТА положительный, когда доплеровский сдвиг отрицателен.
[00180] Опционально, на основе деления сот на основе скорости дрейфа TA, показанного на фиг. 12, для достижения точности ошибок TA, требуемой в существующем 5G NR, радиус соты непосредственно под радарной базовой станцией должен быть установлен на 10 км во время разделения соты. Однако радиус соты слишком мал для спутника, а различные конструкции радиуса соты увеличивают сложность конструкции и реализации. Следовательно, согласно варианту осуществления, показанному на фиг. 12, эта заявка дополнительно предоставляет способ деления для разных скоростей дрейфа TA в каждой соте. Фиг. 13 - схематическая диаграмма 2 деления соты на основе скорости дрейфа TA согласно этой заявке. Как показано на фиг. 13, в сотах, разделенных спутниковой базовой станцией, соты с разными относительными местоположениями соответствуют одной или нескольким скоростям дрейфа TA. Различные области в соте, включая множество скоростей дрейфа TA, соответствуют разным скоростям дрейфа TA. Следовательно, спутниковая базовая станция может транслировать в соте все скорости дрейфа TA в соте, а оконечные устройства в разных местах могут выбирать на основе такого параметра, как доплеровский сдвиг частоты, соответствующую скорость дрейфа TA в соте, где расположены оконечные устройства. Сота, расположенная непосредственно под спутниковой базовой станцией, имеет минимальный радиус, и скорости дрейфа TA, которые могут использоваться оконечными устройствами в соте, включают в себя ΔTA 11’, ΔTA 12’, ΔTA 13’, -ΔTA 11’, -ΔTA 12’ и -ΔTA 13’. Сота вне соты, расположенной непосредственно под спутниковой базовой станцией, имеет немного больший радиус. На основе различных направлений движения спутниковой базовой станции, скорости дрейфа TA, которые могут отдельно использоваться оконечными устройствами в соте, включают в себя ΔTA 14’, ΔTA 15’ и ΔTA 16’ или включают -ΔTA 14’, -ΔTA 15’ и -ΔTA 16’. Сота, расположенная на границе максимального покрытия спутниковой базовой станции, имеет максимальный радиус. Основываясь на различных направлениях движения спутниковой базовой станции, скорости дрейфа TA, которые могут отдельно использоваться оконечными устройствами, расположенными в соте, включают в себя ΔTA 1k’ или включают -ΔTA 1k’. Следовательно, в этом варианте осуществления оконечное устройство может выполнять предварительную компенсацию, чтобы уменьшить ошибку TA, вызванную задержкой, когда спутниковая базовая станция указывает регулировать TA. Кроме того, когда сота, соответствующая спутниковой базовой станции, делится, радиус соты не нужно ограничивать на основе скорости дрейфа TA. Это снижает сложность проектирования и реализации.
[00181] В вариантах осуществления, представленных в вышеупомянутых вариантах осуществления этой заявки, способы, предоставленные в этой заявке, описаны и объяснены с точки зрения устройства сети доступа и оконечного устройства. Для реализации функций в способе, предусмотренном в вариантах осуществления этой заявки, устройство сети доступа и оконечное устройство могут включать в себя структуру оборудования и/или программный модуль, а также реализовывать функции в форме аппаратной структуры, программного модуля, или сочетания аппаратной структуры и программного модуля. Выполняется ли функция в вышеупомянутых функциях аппаратной структурой, программным модулем или комбинацией аппаратной структуры и программного модуля, зависит от конкретных приложений и конструктивных ограничений технических решений.
[00182] Фиг. 14 - схематическая диаграмма структуры в варианте осуществления оконечного устройства в соответствии с этой заявкой. Оконечное устройство выполнено с возможностью выполнения способа оконечного устройства в вышеупомянутом варианте осуществления. Как показано на фиг. 14, оконечное устройство, предусмотренное в этом варианте осуществления, включает в себя модуль 1401 приемопередатчика, модуль 1402 определения параметров и модуль 1403 определения TA. Модуль 1401 приемопередатчика выполнен с возможностью получения параметра регулировки ТА от устройства сети доступа, где параметр регулировки ТА используется для указания регулировки ТА оконечного устройства. Модуль 1402 определения параметров выполнен с возможностью определения коэффициента масштабирования TA оконечного устройства, параметра разнесения поднесущих оконечного устройства и первого TA, используемого, когда оконечное устройство обменивается данными с устройством сети доступа до приема параметра регулировки TA, где коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства. Модуль 1403 определения TA дополнительно выполнен с возможностью определения второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Модуль 1401 приемопередатчика дополнительно выполнен с возможностью осуществления связи с устройством сети доступа с использованием второго TA.
[00183] Оконечное устройство, предусмотренное в этом варианте осуществления, может быть выполнено с возможностью выполнения способа, выполняемого оконечным устройством в способе, показанном на фиг. 7. Реализации и принципы работы оконечного устройства такие же, и подробности не описываются снова.
[00184] Опционально, модуль 1403 определения TA в частности выполнен с возможностью вычисления TA2 с использованием формулы TA2 = TA1+k∙(TА-31)∙16∙64/2μ, где TA1 - это первое TA, TA - параметр регулировки TA, k - коэффициент масштабирования TA, 2μ - параметр разнесения поднесущих, ∆f=2μ∙15[кГц] и Δf - разнесение поднесущих оконечного устройства.
[00185] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью определения коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать ТА.
[00186] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью вычисления коэффициента k масштабирования TA с использованием формулы 2(v1+v2)/fTA/c=k∙32∙16∙64∙Tc/8, где v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, а Tc - базовая единица времени.
[00187] Опционально, модуль 1402 определения параметров дополнительно выполнен с возможностью определения того, соответствует ли регулировка ТА оконечного устройства, обработанная коэффициентом масштабирования ТА, предварительно установленному условию, и, если регулировка ТА соответствует предварительно установленному условию, определять второе ТА на основе параметра регулировки ТА, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA.
[00188] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью определения коэффициента масштабирования ТА на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа.
[00189] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью определения, посредством поиска первого соотношения отображения, коэффициента масштабирования TA, соответствующего скорости движения устройства сети доступа, высоте, на которой расположено устройство сети доступа, и временному опережению по высоте устройства сети доступа. Первое соотношение отображения включает в себя соответствие между по меньшей мере одним из скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования TA.
[00190] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью определения, посредством поиска второго соотношения отображения, коэффициента масштабирования TA, соответствующего разнесению поднесущих оконечного устройства, скорости движения устройства сети доступа, высоте, на которой находится устройство сети доступа, и временному опережению по высоте устройства сети доступа. Второе соотношение отображения включает в себя соответствие между по меньшей мере одним из разнесения поднесущих оконечного устройства, скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа и коэффициентом масштабирования ТА.
[00191] Опционально, модуль 1402 определения параметров в частности выполнен с возможностью определения коэффициента масштабирования TA на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа.
[00192] Опционально, модуль 1403 определения TA дополнительно выполнен с возможностью определения второго TA на основе параметра смещения TA, параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA, где параметр смещения TA используется для выполнения обработки смещения при регулировке ТА оконечного устройства.
[00193] Опционально, модуль 1401 приемопередатчика дополнительно выполнен с возможностью приема информации индикации, отправленной устройством сети доступа, где информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство. Модуль 1402 определения параметров дополнительно выполнен с возможностью определения общей задержки.
[00194] Оконечное устройство, предусмотренное в этом варианте осуществления, может быть выполнено с возможностью исполнения способа, выполняемого оконечным устройством в способе, показанном на фиг. 3. Реализации и принципы работы оконечного устройства такие же, и подробности не описываются снова.
[00195] Опционально, модуль 1401 приемопередатчика дополнительно выполнен с возможностью: когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получать начальный параметр TA от устройства сети доступа. Модуль 1403 определения TA дополнительно выполнен с возможностью определения начального TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих.
[00196] Опционально, общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[00197] Опционально, модуль 1402 определения параметров дополнительно выполнен с возможностью: если оконечное устройство находится в статическом состоянии, определять скорость дрейфа TA оконечного устройства, где скорость дрейфа TA используется для указания регулировки TA, которая осуществляется в соте, где находится оконечное устройство, и вызвана перемещением устройства сети доступа.
[00198] Модуль 1403 определения TA дополнительно выполнен с возможностью определения четвертого TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих, где третье TA является TA, используемым, когда оконечное устройство обменивается данными устройством сети доступа до определения четвертого ТА. Модуль 1401 приемопередатчика дополнительно выполнен с возможностью связи с устройством сети доступа с использованием четвертого TA.
[00199] Опционально, модуль 1403 определения TA дополнительно выполнен с возможностью вычисления четвертого TA с использованием формулы TA4=TA3+∆NTA+∆N’TA∙∆t, где ∆NTA=(TA-31)∙16∙64/2μ, TA - параметр регулировки TA, отправленный устройством сети доступа, ∆N’TA - это регулировка TA, Δt=t1-t0, t0 – время, в которое оконечное устройство принимает параметр регулировки TA, а t1 - это время, в которое оконечное устройство должно отправить данные связи восходящей линии связи на устройство сети доступа.
[00200] Опционально, модуль 1402 определения параметров дополнительно выполнен с возможностью определения скорости дрейфа TA оконечного устройства в соответствии с третьим соотношением отображения, где третье соотношение отображения включает в себя соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
[00201] Оконечное устройство, предусмотренное в этом варианте осуществления, может быть выполнено с возможностью выполнения способа, выполняемого оконечным устройством в способе в вышеупомянутых вариантах осуществления. Реализации и принципы работы оконечного устройства такие же, и подробности не описываются снова.
[00202] Фиг. 15 - схематическая диаграмма структуры в варианте осуществления устройства сети доступа согласно этой заявке. Устройство сети доступа выполнено с возможностью выполнения способа устройства сети доступа в вышеупомянутом варианте осуществления. Как показано на фиг. 15, устройство сети доступа, представленное в этом варианте осуществления, включает в себя модуль 1501 приемопередатчика и модуль 1502 определения. Модуль 1502 определения выполнен с возможностью определения параметра регулировки TA оконечного устройства, где параметр регулировки TA используется для указания регулировки TA оконечного устройства. Модуль 1501 приемопередатчика выполнен с возможностью отправки параметра регулировки TA на оконечное устройство, чтобы позволить оконечному устройству определять второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA, где коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке TA оконечного устройства, а первое TA - это TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа до того, как оконечное устройство принимает параметр регулировки TA.
[00203] Устройство сети доступа, представленное в этом варианте осуществления, может быть выполнено с возможностью выполнения способа, выполняемого устройством сети доступа в способе, показанном на фиг. 7. Реализации и принципы работы оконечного устройства такие же, и подробности снова не описываются.
[00204] Опционально, модуль 1501 приемопередатчика дополнительно выполнен с возможностью отправки информации индикации на оконечное устройство, где информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство. Опционально, общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
[00205] Опционально, модуль 1501 приемопередатчика в частности выполнен с возможностью: широковещательной передачи общей задержки в соте, в которой расположено оконечное устройство; или широковещательной передачи временного опережения по высоте в зоне покрытия устройства сети доступа и широковещательной передачи углового временного опережения в соте, в которой расположено оконечное устройство.
[00206] Устройство сети доступа, предоставленное в этом варианте осуществления, может быть выполнено с возможностью выполнения способа, выполняемого устройством сети доступа в способе в вышеупомянутых вариантах осуществления. Реализации и принципы работы оконечного устройства такие же, и подробности не описываются снова.
[00207] Разделение на модули в вариантах осуществления этой заявки является примером, представляет собой просто разделение на логические функции и может быть другим разделением в фактической реализации. Кроме того, функциональные модули в вариантах осуществления этой заявки могут быть интегрированы в один процессор, или каждый из модулей может существовать отдельно физически, или два или более модулей могут быть интегрированы в один модуль. Интегрированный модуль может быть реализован в виде аппаратных средств или может быть реализован в виде программного функционального модуля.
[00208] Фиг. 16 - схематическая диаграмма структуры в варианте осуществления аппаратуры связи согласно этой заявке. Аппаратура связи, показанная на фиг. 16, может быть выполнена с возможностью служить в качестве оконечного устройства в любом из вышеупомянутых вариантов осуществления этой заявки или устройства сети доступа в любом из вышеупомянутых вариантов осуществления, чтобы реализовать вышеупомянутый способ определения TA для оконечного устройства. Аппаратура 1000 связи включает в себя интерфейс 1010 связи, процессор 1020 и память 1030. Интерфейс связи 1010 может быть приемопередатчиком, схемой, шиной или интерфейсом в другой форме и выполнен с возможностью связи с другим устройством с использованием среды передачи. Интерфейс 1010 связи, процессор 1020 и память 1030 связаны. Соединения в вариантах осуществления этой заявки представляют собой косвенные соединения или коммуникационные соединения между устройствами, блоками или модулями, могут быть реализованы в электронной, механической или других формах и используются для обмена информацией между устройствами, блоками или модулями.
[00209] В этом варианте осуществления этой заявки конкретная среда связи между интерфейсом 1010 связи, процессором 1020 и памятью 1030 не ограничена. В этом варианте осуществления этой заявки интерфейс 1010 связи, память 1030 и процессор 1020 подключены через шину 1040 на фиг. 16. Шина представлена жирной линией на фиг. 16. Способ подключения других компонентов описан просто схематично и не является ограничивающим. Шину можно разделить на адресную шину, шину данных, шину управления и подобное. Для простоты представления только одна жирная линия используется для обозначения шины на фиг. 16, но это не означает, что существует только одна шина или только один тип шины.
[00210] В возможной реализации, если аппаратура связи, показанная на фиг. 16, является оконечным устройством, оконечное устройство может быть выполнено с возможностью реализации способов, выполняемых оконечным устройством в вышеупомянутых вариантах осуществления этой заявки.
[00211] Например, интерфейс 1010 связи выполнен с возможностью получения параметра регулировки ТА от устройства сети доступа и отправки параметра регулировки ТА в процессор, где параметр регулировки ТА используется для указания регулировки ТА оконечного устройства. Память 1030 хранит инструкции, а процессор 1020 вызывает и выполняет инструкции, чтобы позволить процессору 1020 определить, после приема параметра регулировки TA, коэффициент масштабирования TA оконечного устройства, параметр разнесения поднесущих оконечного устройства и первое TA, используемое, когда оконечное устройство обменивается данными с устройством сети доступа до приема параметра регулировки TA. Процессор 1020 дополнительно определяет второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA. Интерфейс 1010 связи дополнительно обменивается данными с устройством сети доступа с помощью второго TA. В качестве альтернативы, например, интерфейс 1010 связи дополнительно выполнен с возможностью приема информации индикации, отправленной устройством сети доступа, и отправки информации индикации процессору. Информация индикации используется для указания общей задержки соты, в которой находится оконечное устройство. Процессор 1020 дополнительно выполнен с возможностью: при приеме информации индикации определять общую задержку на основе информации индикации. Интерфейс 1010 связи дополнительно выполнен с возможностью: когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получать начальный параметр TA от устройства сети доступа и отправлять начальный параметр TA в процессор. Процессор 1020 дополнительно выполнен с возможностью: при приеме начального параметра TA определять начальное TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих.
[00212] Для конкретной реализации вышеупомянутого примера обратитесь к подробному описанию в примере, соответствующем вышеизложенному способу. Подробности не описаны здесь снова.
[00213] В другой возможной реализации, если аппаратура связи, показанная на фиг. 16, является устройством сети доступа, устройство сети доступа может быть выполнено с возможностью реализации способов, выполняемых устройством сети доступа в вышеупомянутых вариантах осуществления этой заявки.
[00214] Например, когда процессор 1020 вызывает и выполняет инструкции, хранящиеся в памяти 1030, процессор 1020 имеет возможность определять параметр регулировки ТА оконечного устройства и отправляет параметр регулировки ТА на интерфейс 1010 связи. После приема параметра регулировки ТА интерфейс 1010 связи отправляет параметр регулировки ТА на оконечное устройство. В качестве альтернативы, например, интерфейс 1010 связи дополнительно выполнен с возможностью отправки информации индикации на оконечное устройство, где информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство.
[00215] Для конкретной реализации вышеупомянутого примера обратитесь к подробному описанию в примере, соответствующем вышеизложенному способу. Подробности не описаны здесь снова.
[00216] В вариантах осуществления этой заявки процессор может быть процессором общего назначения, процессором цифровых сигналов, специализированной интегральной схемой, программируемой вентильной матрицей или другим программируемым логическим устройством, дискретным логическим устройством или транзисторным логическим устройством, или дискретным аппаратным компонентом и может реализовывать или выполнять способы, этапы и логические блок-схемы, раскрытые в вариантах осуществления этой заявки. Универсальный процессор может быть микропроцессором или любым обычным процессором или тому подобным. Этапы способа, раскрытого со ссылкой на варианты осуществления этой заявки, могут выполняться непосредственно аппаратным процессором или могут выполняться с использованием комбинации аппаратного обеспечения в процессоре и программного модуля.
[00217] В этом варианте осуществления этой заявки память может быть энергонезависимой памятью, например, жестким диском (hard disk drive, HDD) или твердотельным накопителем (solid-state drive, SSD), или может быть энергозависимой памятью (volatile memory), например, оперативной памятью (random access memory, RAM). Память - это любой другой носитель, который может нести или хранить ожидаемый программный код в форме структуры инструкций или структуры данных, и к которому компьютер может получить доступ, но не ограничивается этим. В качестве альтернативы память в вариантах осуществления этой заявки может быть схемой или любой другой аппаратурой, которая может реализовывать функцию хранения и выполнена с возможностью хранения программных инструкций и/или данных.
[00218] Все или некоторые из вышеперечисленных способов в вариантах осуществления этой заявки могут быть реализованы с использованием программного обеспечения, аппаратного обеспечения, микропрограммного обеспечения или любой их комбинации. Когда программное обеспечение используется для реализации вариантов осуществления, все или некоторые варианты осуществления могут быть реализованы в форме компьютерного программного продукта. Компьютерный программный продукт включает в себя одну или несколько компьютерных инструкций. Когда инструкции компьютерной программы загружаются и выполняются на компьютере, процедура или функции согласно вариантам осуществления настоящего изобретения полностью или частично генерируются. Компьютер может быть компьютером общего назначения, компьютером специального назначения, компьютерной сетью, сетевым устройством, пользовательским оборудованием или другим программируемым устройством. Компьютерные инструкции могут храниться на компьютерно-читаемом носителе данных или могут передаваться с компьютерно-читаемого носителя данных на другой компьютерно-читаемый носитель данных. Например, компьютерные инструкции могут передаваться с веб-сайта, компьютера, сервера или центра обработки данных на другой веб-сайт, компьютер, сервер или центр обработки данных проводным (например, коаксиальный кабель, оптическое волокно или цифровая абонентская линия (digital subscriber line, сокращенно DSL)) или беспроводным (например, инфракрасная, радио или микроволновая) образом. Компьютерно-читаемый носитель данных может быть любым используемым носителем, доступным для компьютера, или устройством хранения данных, например сервером или центром обработки данных, объединяющим один или несколько используемых носителей. Используемый носитель может быть магнитным носителем (например, гибким диском, жестким диском или магнитной лентой), оптическим носителем (например, цифровым видеодиском (digital video disc, DVD для краткости)), полупроводниковой средой (например, SSD) и т.п.
[00219] Очевидно, что специалист в данной области техники может внести различные модификации и изменения в эту заявку, не выходя за рамки этой заявки. Эта заявка предназначена для охвата этих модификаций и вариантов этой заявки при условии, что они подпадают под объем защиты, определенный следующей формулой изобретения и их эквивалентными технологиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СПУТНИКОВОЙ СВЯЗИ | 2021 |
|
RU2824933C1 |
| АВТОНОМНАЯ КОРРЕКЦИЯ ВРЕМЕННОЙ ДИАГРАММЫ ДЛЯ БЕСПРОВОДНОГО УСТРОЙСТВА | 2017 |
|
RU2717553C1 |
| МЕТОД И УСТРОЙСТВО ДЛЯ ВРЕМЕННОЙ СИНХРОНИЗАЦИИ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ | 2020 |
|
RU2799887C2 |
| СИГНАЛИЗАЦИЯ СМЕЩЕНИЯ TA B NR | 2018 |
|
RU2741569C1 |
| ГЕНЕРАЦИЯ И ПРИЕМ СИГНАЛА ОБНАРУЖЕНИЯ | 2014 |
|
RU2629430C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА БЕСПРОВОДНОГО СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2779154C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА БЕСПРОВОДНОГО СИГНАЛА В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2705227C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛА ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2018 |
|
RU2732993C1 |
| СМЕЩЕНИЕ ОПЕРЕЖЕНИЯ СИНХРОНИЗАЦИИ ДЛЯ ПЕРЕКЛЮЧЕНИЯ МЕЖДУ ВОСХОДЯЩЕЙ ЛИНИЕЙ СВЯЗИ И НИСХОДЯЩЕЙ ЛИНИЕЙ СВЯЗИ В НОВОМ РАДИО | 2018 |
|
RU2739289C1 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ ПЕРЕДАЧИ ДЛЯ ФИЗИЧЕСКИХ КАНАЛОВ ПРОИЗВОЛЬНОГО ДОСТУПА | 2011 |
|
RU2559201C2 |
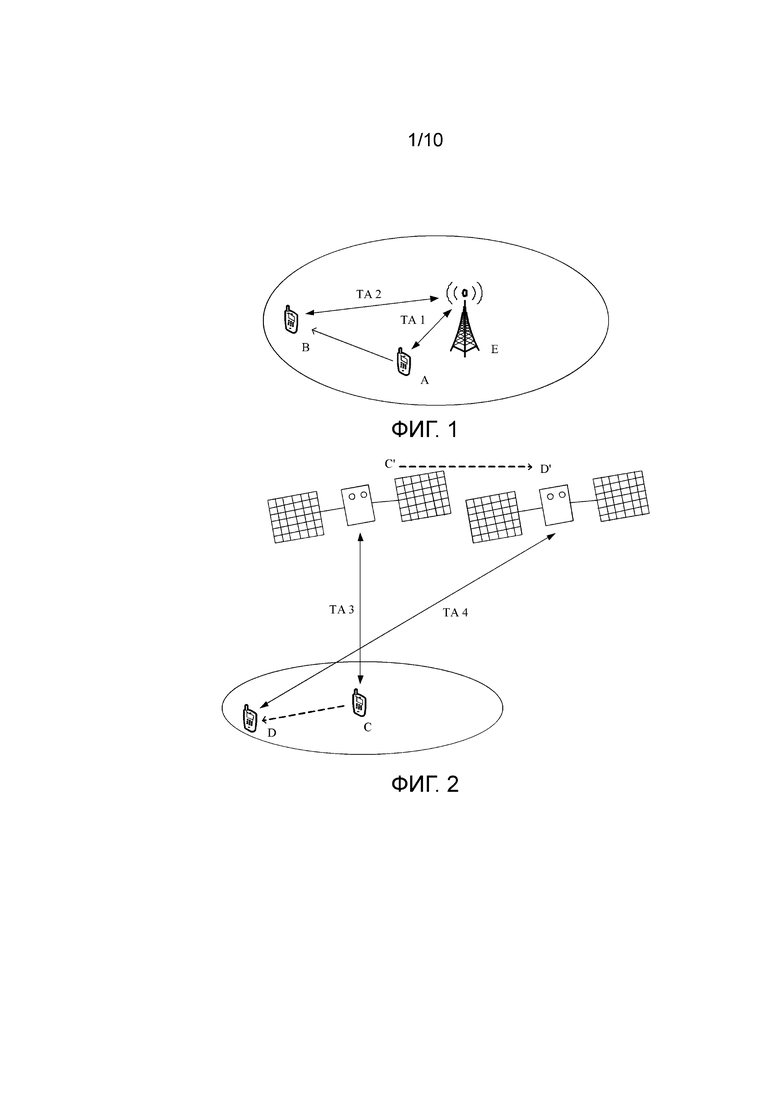
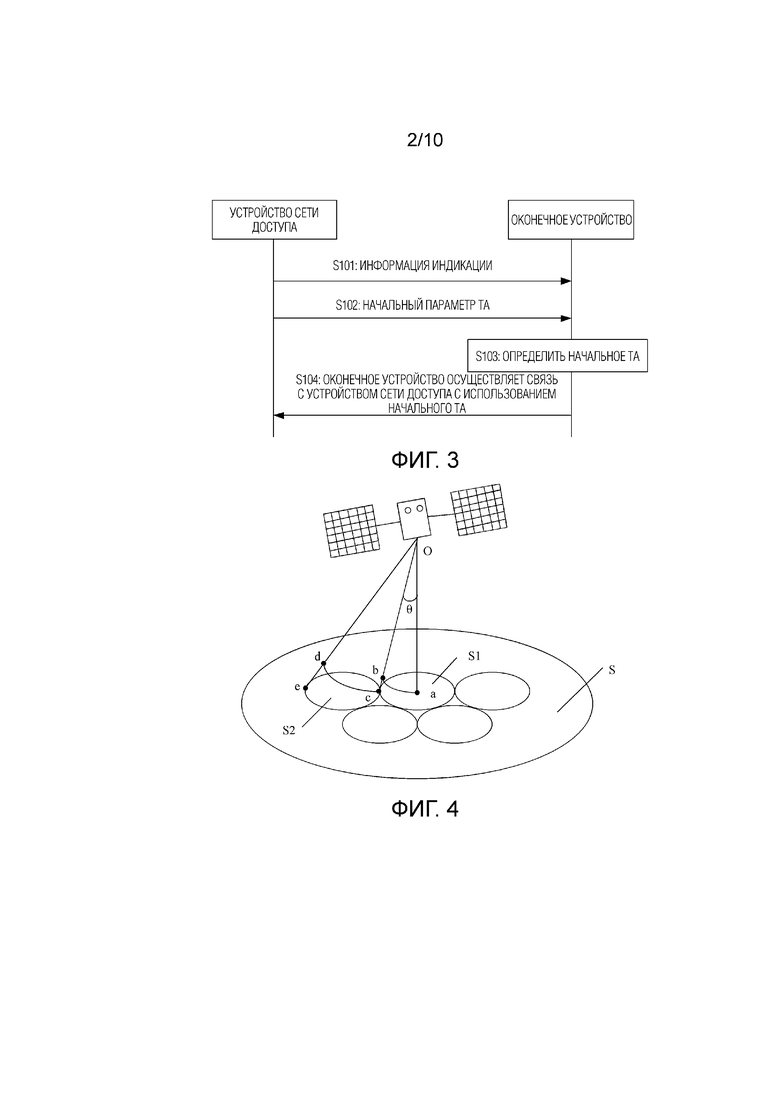
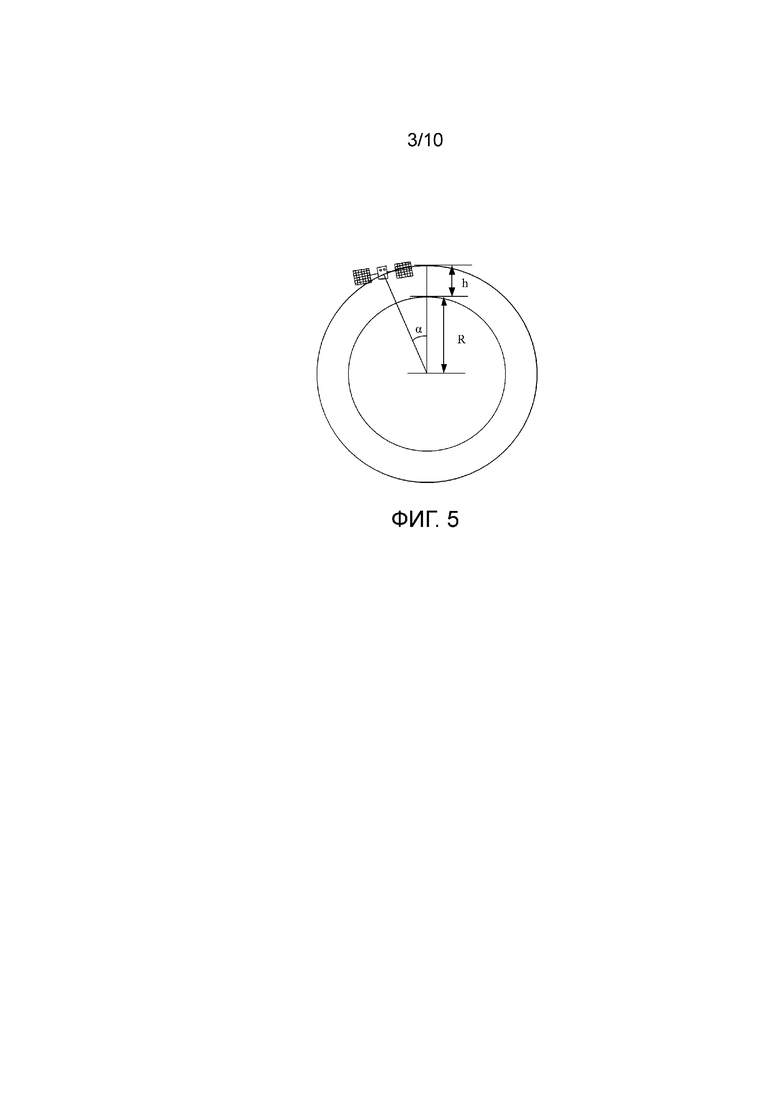
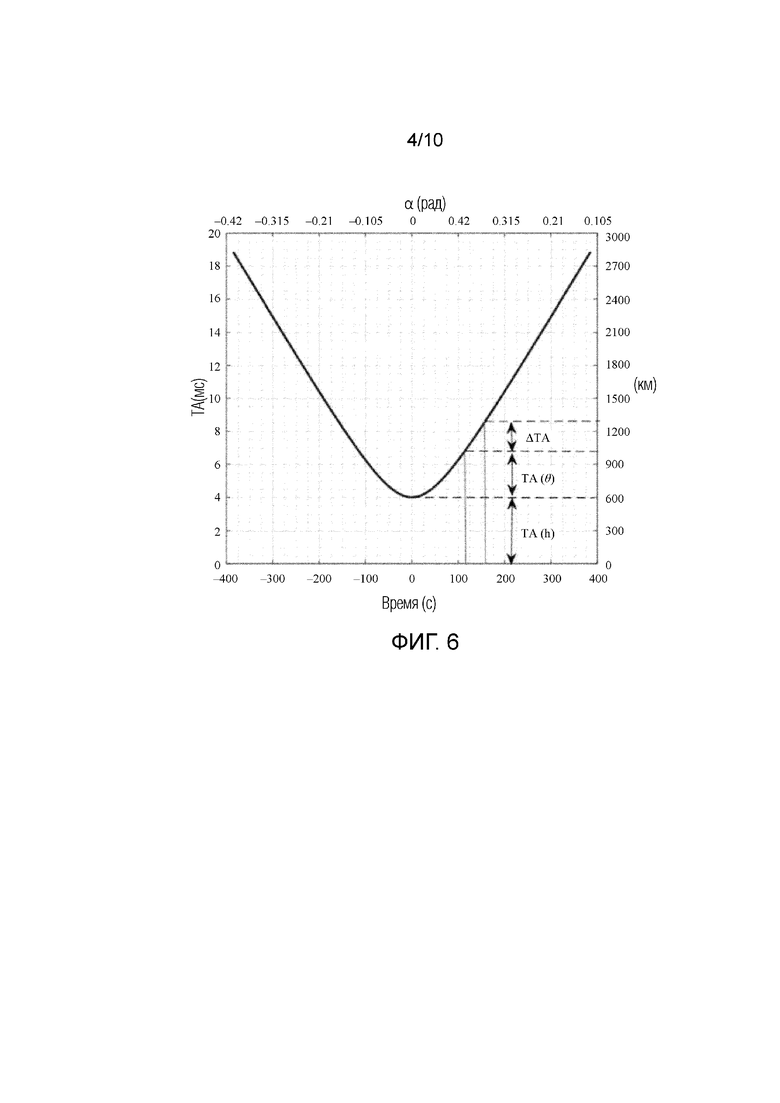
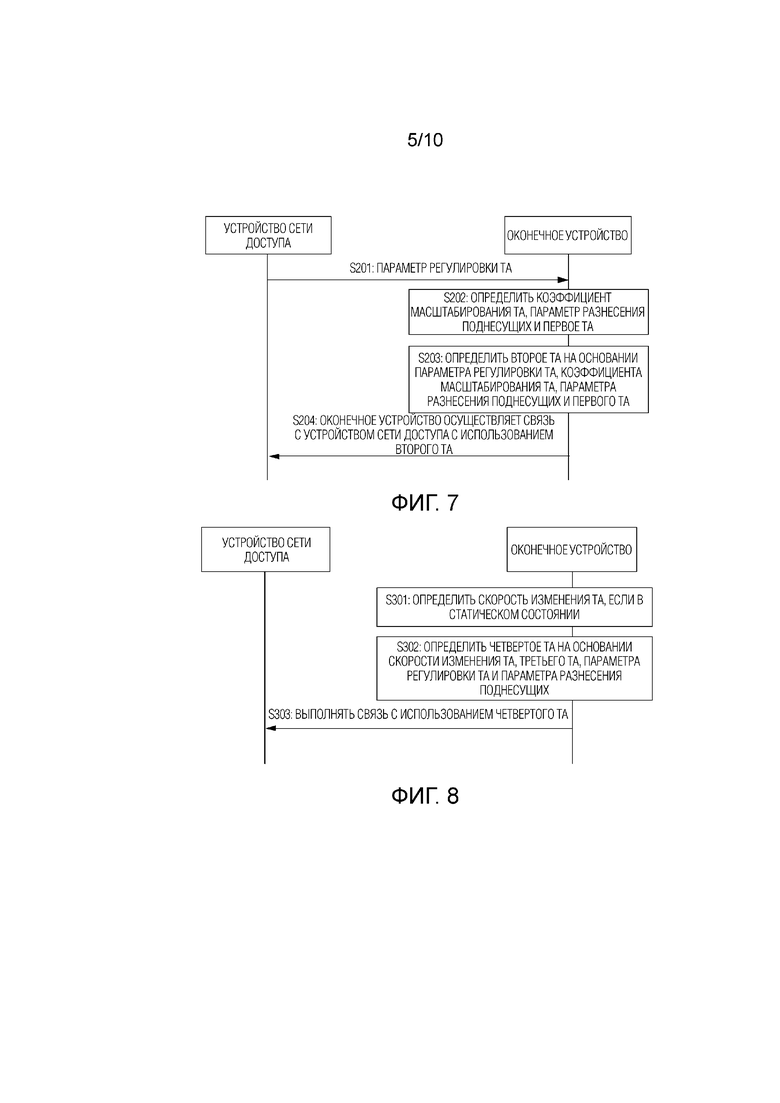
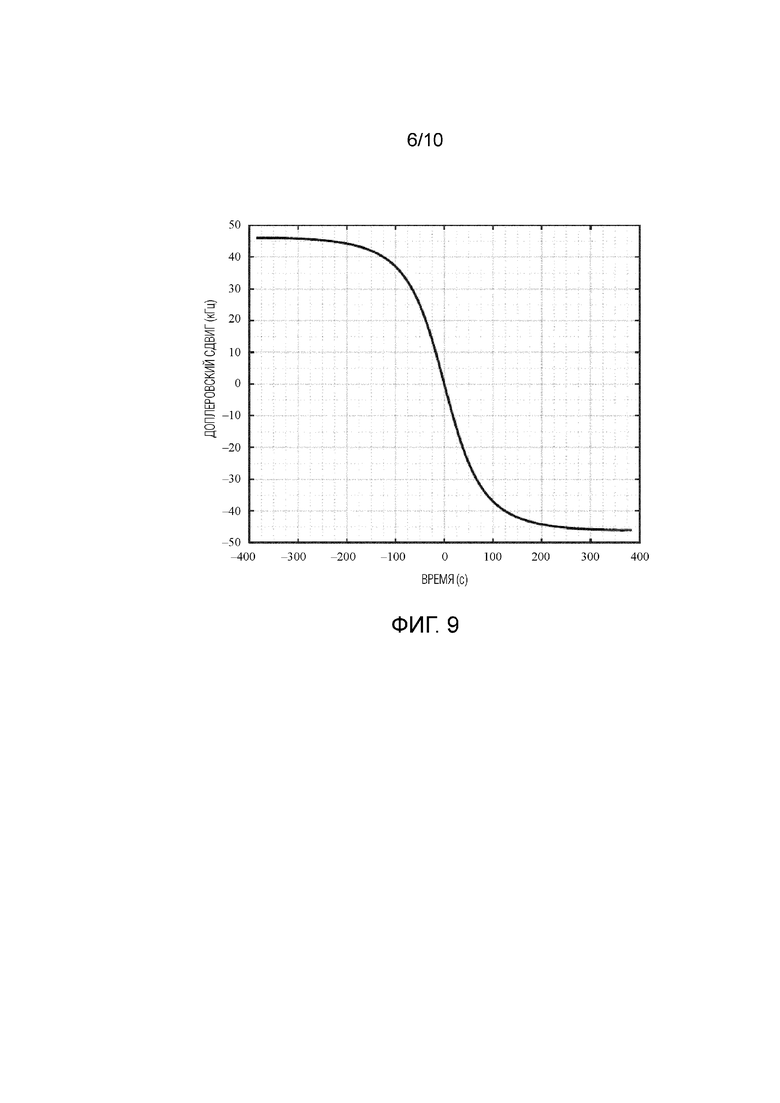
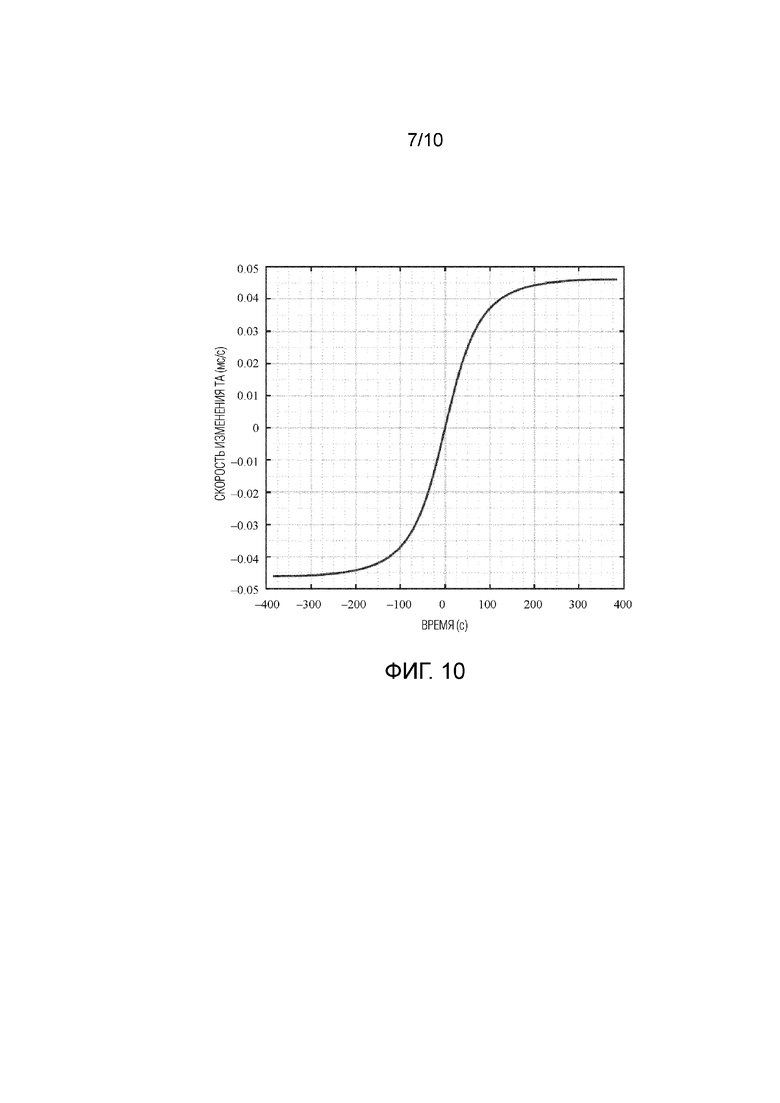
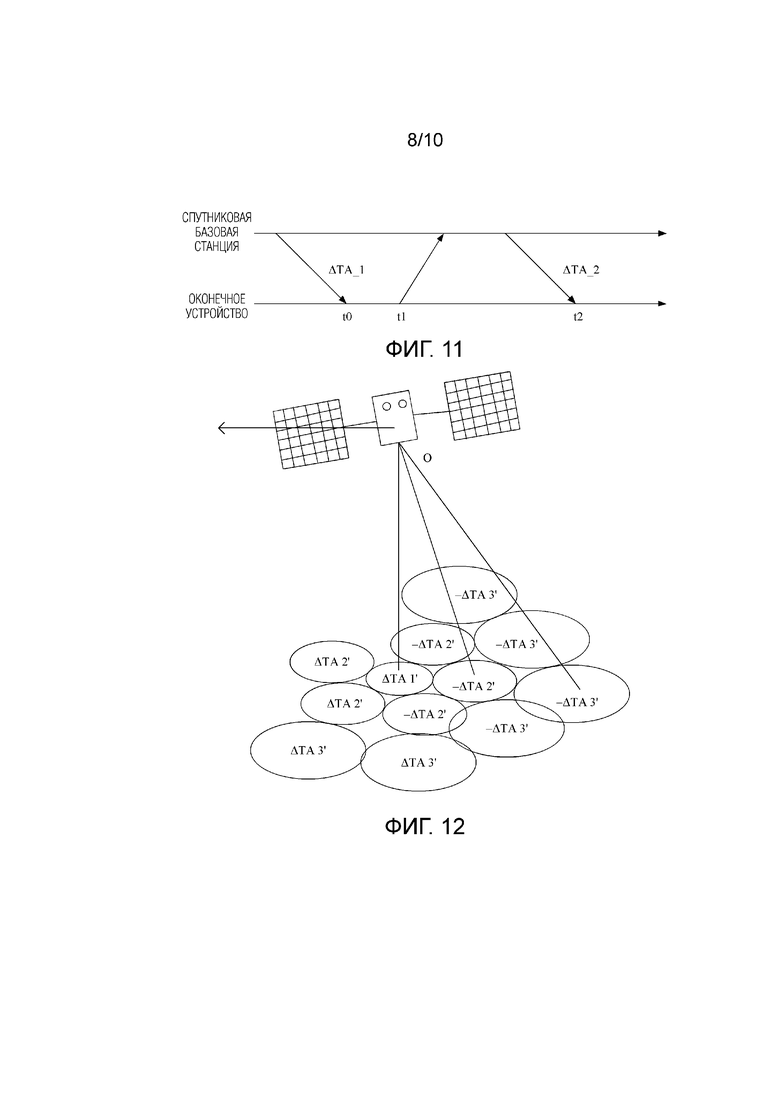
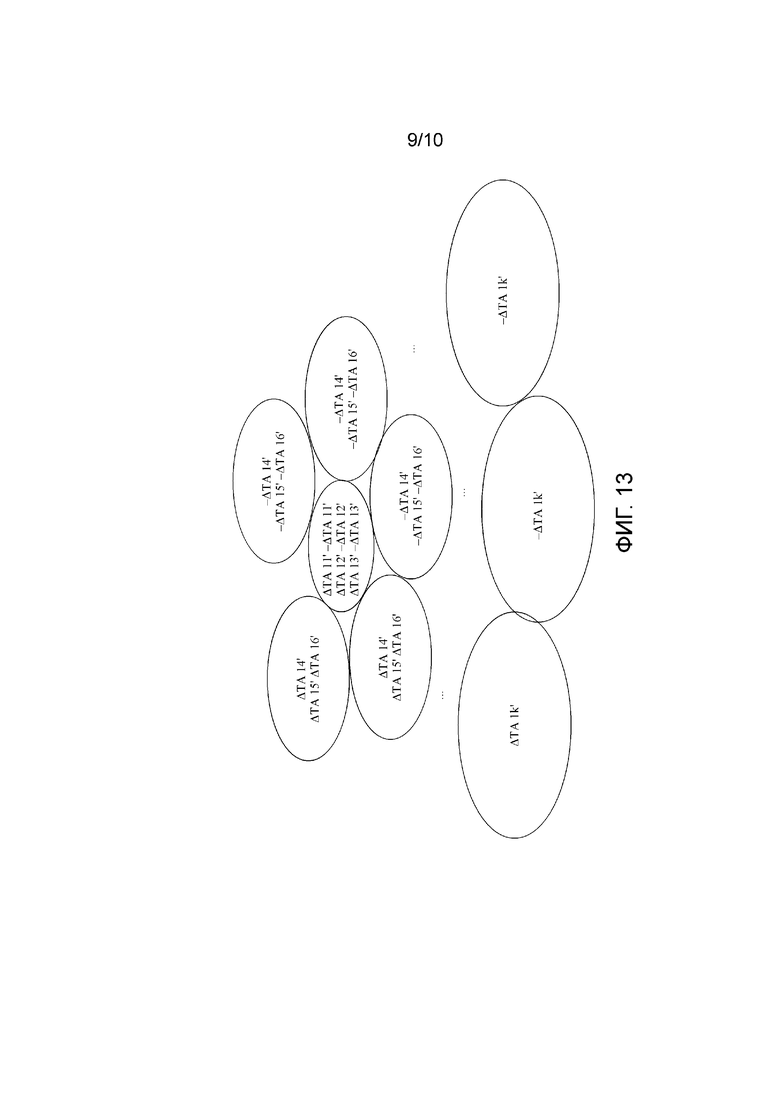
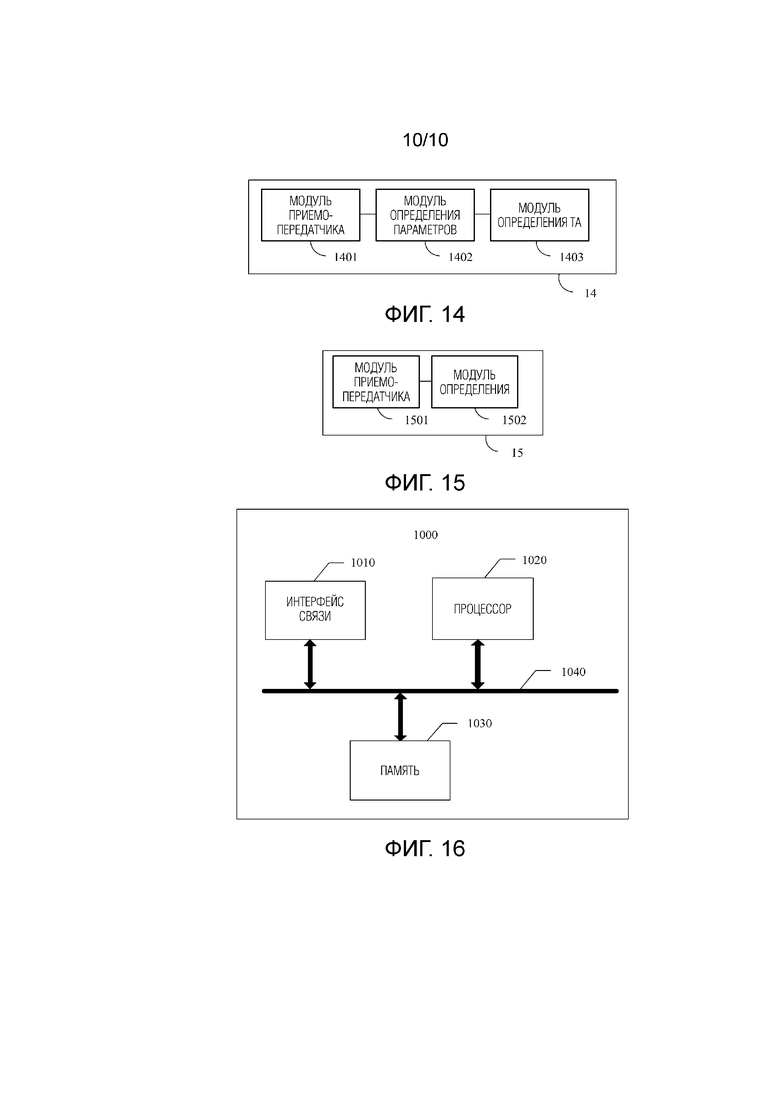
Изобретение относится к области связи. Технический результат заключается в обеспечении возможности регулировать временное опережение (timing advance, ТА) оконечным устройством, когда движение устройства вызывается как оконечным устройством, так и спутниковой базовой станцией. После приема параметра регулировки TA, отправленного устройством сети доступа, и определения того, что TA оконечного устройства необходимо отрегулировать, оконечное устройство определяет коэффициент масштабирования TA, параметр разнесения поднесущих и первое TA, чтобы совместно регулировать первое ТА для получения второго ТА. Параметр k регулировки TA добавляется, когда оконечное устройство определяет второе TA, так что диапазон регулировки TA больше. TA может применяться для определения TA оконечного устройства, когда оконечное устройство осуществляет связь со спутниковой базовой станцией. 7 н. и 11 з.п. ф-лы, 16 ил. 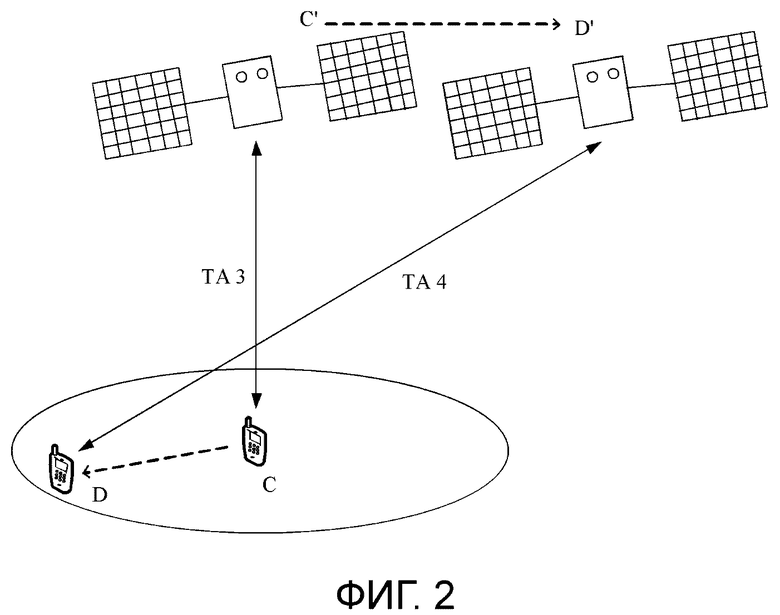
1. Способ определения временного опережения (timing advance, ТА) для оконечного устройства, включающий в себя:
получение параметра регулировки ТА от устройства сети доступа, при этом параметр регулировки ТА используется для указания регулировки ТА оконечного устройства;
определение коэффициента масштабирования TA оконечного устройства, параметра разнесения поднесущих оконечного устройства и первого TA, используемого, когда оконечное устройство осуществляет связь с устройством сети доступа до приема параметра регулировки TA, при этом коэффициент масштабирования TA используется для выполнения обработки масштабирования при регулировке ТА оконечного устройства; и
определение второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA;
причем определение коэффициента масштабирования TA включает в себя этапы, на которых:
определяют коэффициент масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA; или
определяют коэффициент масштабирования TA на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа; или
определяют коэффициент масштабирования TA на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа; или
определяют коэффициент масштабирования TA на основе информации атрибутов устройства сети доступа.
2. Способ по п. 1, в котором определение второго TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA включает в себя:
вычисление TA2 по формуле TA2 = TA1+k⋅(TА-31)⋅16⋅64/2μ,
где TA1 - это первое TA, TA - параметр регулировки TA, k - коэффициент масштабирования TA, 2μ - параметр разнесения поднесущих, Δf=2μ⋅15[кГц] и Δf - разнесение поднесущих оконечного устройства.
3. Способ по п. 1 или 2, в котором определение коэффициента масштабирования TA на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать ТА, включает в себя:
вычисление коэффициента k масштабирования TA с использованием формулы 2(v1+v2)/fTA/c=k⋅32⋅16⋅64⋅Tc/8,
где v1 - максимальная скорость движения оконечного устройства, v2 - скорость движения устройства сети доступа, fTA - частота, с которой устройство сети доступа указывает оконечному устройству регулировать TA, c - скорость света, а Tc - базовая единица времени.
4. Способ по любому из пп. 1-3, в котором перед получением параметра регулировки TA от устройства сети доступа способ дополнительно содержит:
прием информации индикации, отправленной устройством сети доступа, при этом информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство; и
определение общей задержки на основе информации индикации.
5. Способ по п. 4, причем перед получением параметра регулировки TA от устройства сети доступа способ дополнительно включает в себя:
когда оконечное устройство осуществляет доступ к устройству сети доступа в первый раз, получение начального параметра TA от устройства сети доступа; и
определение начального TA на основе общей задержки, начального параметра TA и параметра разнесения поднесущих.
6. Способ по п. 4 или 5, в котором
общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
7. Способ по любому из пп. 1-6, дополнительно содержащий:
если оконечное устройство находится в статическом состоянии, определение скорости дрейфа TA оконечного устройства, при этом скорость дрейфа TA используется для указания регулировки TA, которая осуществляется в соте, в которой находится оконечное устройство, и вызвана движением устройства сети доступа; и
определение четвертого TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих, при этом третье TA является TA, используемым, когда оконечное устройство осуществляет связь с устройством сети доступа перед определением четвертого TA.
8. Способ по п. 7, в котором определение четвертого TA на основе скорости дрейфа TA, третьего TA, параметра регулировки TA и параметра разнесения поднесущих включает в себя:
вычисление четвертого TA с использованием формулы TA4=TA3+ΔNTA+ΔN’TA⋅Δt, где ΔNTA=(TA-31)⋅16⋅64/2μ, TA - это параметр регулировки TA, отправленный устройством сети доступа, ΔN’TA - это регулировка TA, Δt=t1-t0, t0 - время, в которое оконечное устройство принимает параметр регулировки TA, и t1 - время, в которое оконечное устройство должно отправить данные связи восходящей линии связи на устройство сети доступа.
9. Способ по п. 7 или 8, в котором определение скорости дрейфа ТА оконечного устройства включает в себя:
определение скорости дрейфа TA оконечного устройства согласно третьему соотношению отображения, при этом третье соотношение отображения содержит соответствие между доплеровским сдвигом частоты по меньшей мере одного устройства сети доступа и скоростью дрейфа TA оконечного устройства.
10. Способ определения временного опережения (timing advance, ТА) для оконечного устройства, включающий в себя:
определение параметра регулировки TA оконечного устройства, при этом параметр регулировки TA используется для указания регулировки TA оконечного устройства; и
отправку параметра регулировки TA на оконечное устройство, чтобы позволить оконечному устройству определять второе TA на основе параметра регулировки TA, коэффициента масштабирования TA, параметра разнесения поднесущих и первого TA, при этом коэффициент масштабирования TA используется для выполнения обработки масштабирования для регулировки ТА оконечного устройства, и первое ТА - это ТА, используемое, когда оконечное устройство осуществляет связь с устройством сети доступа до приема параметра регулировки ТА, и при этом коэффициент масштабирования TA определяют на основе максимальной скорости движения оконечного устройства, скорости движения устройства сети доступа и частоты, с которой устройство сети доступа указывает оконечному устройству регулировать TA,
или коэффициент масштабирования TA определяют на основе скорости движения устройства сети доступа, высоты устройства сети доступа и временного опережения по высоте устройства сети доступа,
или коэффициент масштабирования TA определяют на основе формата преамбулы произвольного доступа, используемой оконечным устройством в процессе произвольного доступа к устройству сети доступа,
или коэффициент масштабирования TA определяют на основе информации атрибутов устройства сети доступа.
11. Способ по п. 10, дополнительно содержащий:
отправку информации индикации в оконечное устройство, при этом информация индикации используется для указания общей задержки соты, в которой расположено оконечное устройство.
12. Способ по п. 11, в котором:
общая задержка включает в себя временное опережение по высоте устройства сети доступа и угловое временное опережение соты, в которой расположено оконечное устройство.
13. Способ по п. 12, в котором отправка информации индикации в оконечное устройство включает в себя:
широковещательную передачу общей задержки в соте, в которой расположено оконечное устройство;
или
широковещательную передачу временного опережения по высоте в зоне покрытия устройства сети доступа и широковещательную передачу углового временного опережения в соте, в которой расположено оконечное устройство.
14. Аппаратура определения временного опережения (timing advance, ТА) для оконечного устройства, выполненная с возможностью выполнения способа по любому из пп. 1-9.
15. Аппаратура определения временного опережения (timing advance, ТА) для оконечного устройства, выполненная с возможностью выполнения способа по любому из пп. 10-13.
16. Аппаратура связи, содержащая процессор и память, причем в памяти хранятся инструкции; и когда процессор вызывает и выполняет инструкции, аппаратура имеет возможность выполнять способ по любому из пп. 1-9.
17. Аппаратура связи, содержащая процессор и память, причем в памяти хранятся инструкции; и когда процессор вызывает и выполняет инструкции, аппаратура имеет возможность выполнять способ по любому из пп. 10-13.
18. Компьютерно-читаемый носитель данных, содержащий инструкции, при этом, когда инструкции выполняются на компьютере, компьютер имеет возможность выполнять способ по любому из пп. 1-13.
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| THALES, NOKIA, NOKIA SHANGHAI BELL, HNS, NR-NTN: Preliminary solutions for NR to support non-terrestrial networks, 3GPP TSG RAN Meeting #80 (RP-180664), La Jolla, USA, 04.06.2018 (найден 12.01.2023), найден в Интернете https://www.3gpp.org/ftp/TSG_RAN/TSG_RAN/TSGR_80/Docs/ | |||
| NOKIA, | |||
