Предполагаемое изобретение относится к панорамному телевизионному наблюдению, которое выполняется компьютерной системой при помощи телевизионной камеры, обеспечивающей одновременно или последовательно круговой обзор в четырех шаровых слоях окружающей сферической области пространства. При этом для каждого из этих шаровых слоев телевизионный контроль ситуации в реальном масштабе времени осуществляется в пространственном угле 360 градусов по азимуту и десятки градусов по углу места. Сенсорный блок этой телевизионной камеры состоит из изготовленных по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП) четырех или двух фотоприемников, которые имеют форму мишени в виде кругового кольца.
Наиболее близким по технической сущности к заявляемому изобретению следует считать устройство компьютерной системы панорамного телевизионного наблюдения [1], содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив, четвертый панорамный объектив; сенсорный блок, содержащий первый фотоприемник, второй фотоприемник, третий фотоприемник и четвертый фотоприемник, которые имеют форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью первого фотоприемника, второй панорамный объектив - с мишенью второго фотоприемника; третий панорамный объектив - с мишенью третьего фотоприемника, а четвертый панорамный объектив - с мишенью четвертого фотоприемника, причем каждый из четырех фотоприемников сенсорного блока выполнен на кристалле, изготовленном по технологии КМОП, причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки фотоприемника, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео - число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению:

где Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей «кольцевой» строки считывания в «кольцевом» сенсоре, K1 - коэффициент усиления активного пиксела первой «кольцевой» строки, а величина его показателя равна единице, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения, причем на кристаллах всех четырех фотоприемников сенсорного блока имеется разрез (сквозной шлиц), выполненный в радиальном направлении от воображаемого центра кольца к его внешней периферии, в расположение между первым и последним пикселами первой «кольцевой строки, при этом первый фотоприемник установлен в консольное соединение со вторым фотоприемником в шлиц под углом 90°, третий фотоприемник установлен в консольное соединение с четвертым фотоприемником под тем же углом 90°, но с обратной стороны первого фотоприемника, стыкуясь с ней своей обратной стороной, а четвертый фотоприемник - с обратной стороны второго фотоприемника, стыкуясь с ней своей обратной стороной, причем ширина сквозного разреза для всех четырех фотоприемников составляет не менее двух толщин их кристаллов, при этом выход первого фотоприемника сенсорного блока подключен к первому информационному входу мультиплексора, выход второго фотоприемника - ко второму информационному входу мультиплексора, выход третьего фотоприемника - к третьему информационному входу мультиплексора, а выход четвертого фотоприемника - к четвертому информационному входу мультиплексора, выход которого является выходом «видео» телевизионной камеры; на материнской плате сервера установлена плата видео, выполняющая демультиплексирование входного цифрового телевизионного сигнала на четыре канала с последующей записью каждого из «кольцевых» видеосигналов в соответствующую оперативную память сервера и последовательное преобразование первого, второго, третьего и четвертого «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению:

где γг - горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем.
Как отмечалось в описании изобретения [1], устройство прототипа может быть предложено для установки в беспилотном летательном аппарате, например, в гексакоптере.
Отметим, что термином «гексакоптер» принято называть в технической литературе радиоуправляемую модель беспилотного летательного аппарата с шестью крыльями, предназначенного для выполнения аэровидеосъемки местности.
Недостаток прототипа - существенная сложность телевизионной камеры, связанная с наличием в ее составе четырех фотоприемников, а также потери светочувствительных элементов (пикселов) во всех четырех фотоприемниках за счет консольного соединения их между собой путем разреза по методу сквозного шлица.
Задачей изобретения является сокращение количества фотоприемников в составе телевизионной камеры до двух и отказ от консольного соединения фотоприемников между собой, выполняемого путем разреза по методу сквозного шлица, и устранение сопутствующих потерь пикселов в каждом из двух сенсоров при сохранении для беспилотного летательного аппарата возможности мониторинга видеоинформации панорамного сюжета в четырех слоях окружающего пространства в беспосадочном режиме.
Поставленная задача в заявляемом устройстве системы панорамного телевизионного наблюдения для беспилотного летательного аппарата решается тем, что, как и в устройстве прототипа [1], содержащем последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив; а также сенсорный блок, содержащий первый фотоприемник и второй фотоприемник, которые имеют форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью первого фотоприемника, а второй панорамный объектив - с мишенью второго фотоприемника; причем каждый из двух фотоприемников сенсорного блока выполнен на кристалле, изготовленном по технологии КМОП, причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный АЦП, обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки фотоприемника, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео - число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению (1), при этом выход первого фотоприемника сенсорного блока подключен к первому информационному входу мультиплексора видеосигнала, а выход второго фотоприемника - ко второму информационному входу мультиплексора видеосигнала, выход которого является выходом «видео» телевизионной камеры; на материнской плате сервера установлена плата видео, выполняющая демодуляцию (детектирование) входного цифрового телевизионного сигнала и его демультиплексирование на два канала с последующей записью каждого из «кольцевых» видеосигналов соответственно в первый и второй блоки оперативной памяти сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению (2); но при этом, в отличие от прототипа [1], мультиплексор видеосигнала телевизионной выполняет дополнительно высокочастотное модулирование цифрового телевизионного сигнала для осуществления его беспроводной передачи (по эфиру) на сервер, а в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и оба фотоприемника, стыкуясь между собой обратными сторонами кристаллов, а также демодулятор команд оператора и блок поворота (электрический джойстик), механически связанный с оправой, а также демодулятор (детектор) высокочастотных управляющих команд оператора для блока поворота, транслируемых по беспроводной линии связи (по эфиру) от сервера на телекамеру, при этом в беспосадочном режиме работы летательного аппарата по команде, поступающей в телевизионную камеру с компьютера оператора системы, осуществляется при помощи шарикового подшипника плавный пространственный поворот оправы на угол 90°, так что мишень первого фотоприемника устанавливается в положение напротив третьего панорамного объектива, а мишень второго фотоприемника - в положение напротив четвертого панорамного объектива, а если оператором компьютера будет подана на телевизионную камеру альтернативная (противоположная) команда, то оправа с фотоприемниками возвращается в начальное (исходное) положение, причем величина коэффициента усиления активного пиксела K1 для первой строки каждого из двух фотоприемников сенсорного блока телевизионной камеры может быть равна единице или больше ее, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения в режиме организации ручной или автоматической регулировки чувствительности фотоприемников в зависимости от освещенности объектов наблюдения панорамного сюжета; при этом плата видео, размещенная на материнской плате сервера, выполняет высокочастотное модулирование команд управления, демодулирование (детектирование) входного цифрового телевизионного сигнала, а также демультиплексирование нового цифрового телевизионного сигнала на два дополнительных канала с последующей записью каждого из «кольцевых» видеосигналов соответственно в третий и четвертый блоки оперативной памяти сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению (2), а в качестве сервера используется системный блок компьютера оператора системы.
Совокупность известных и новых признаков для заявляемого устройства не известна из уровня техники, следовательно, предлагаемое техническое решение соответствует критерию новизны.
Важно отметить следующее. Светочувствительная площадь пикселов «кольцевой» мишени фотоприемников сенсорного блока, как и для прототипа [1], от строки к строке различна. Это вызывается необходимостью для «кольцевого» фотоприемника, имеющего одинаковое число пикселов в каждой строке, выравнивания разрешающей способности в пределах кадра путем обеспечения одинаковой величины технологического зазора между светочувствительными элементами вдоль каждой «кольцевой» строки.
Но при этом в заявляемом решении, как и в прототипе [1], не происходит межстрочного нарушения чувствительности сенсора по следующим обстоятельствам.
Параметр считывающей апертуры для всех пикселов каждой текущей строки «кольцевого» кадра определяется произведением коэффициента усиления Km пиксела на величину его светочувствительной площади Δm.
Как следует из соотношения (1), этот показатель остается постоянным (неизменным) для всех светочувствительных пикселов фотоприемника.
Не меняется и величина шумовой «дорожки» для каждого активного пиксела фотоприемника, что является обязательным условием реализации его высоких показателей по чувствительности и отношению сигнал/шум.
Поэтому предлагаемое техническое решение соответствует критерию о наличии изобретательского уровня.
На фиг. 1а) приведена структурная схема заявляемой компьютерной системы панорамного телевизионного наблюдения и на этом же чертеже - структурная схема телевизионной камеры в ее составе, реализующая пространственный мониторинг в двух слоях (слева и справа) окружающего пространства; на фиг. 1б) - структурная схема заявляемой компьютерной системы и соответственно структурная схема телевизионной камеры, реализующая пространственный мониторинг в двух других слоях (снизу и сверху) окружающего пространства; на фиг. 2 приведена схемотехническая организация для каждого из двух «кольцевых» фотоприемников сенсора; на фиг. 3 - подробности этой организации применительно к отдельно взятому «радиальному» столбцу; на фиг. 4, по данным [2], представлена фотография изображения, полученного при помощи панорамного объектива; на фиг. 5 - изображена схема блока поворота оправы с фотоприемниками в составе телевизионной камеры.
Устройство компьютерной системы панорамного телевизионного наблюдения, см. фиг. 1а), фиг. 1б), фиг. 2 и фиг. 3, содержит последовательно соединенные телевизионную камеру 1 и сервер 2 (с установленной в нем платой видео), являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров в позиции 3, при этом в состав телевизионной камеры 1 входит первый панорамный объектив 1-1, второй панорамный объектив 1-2, третий панорамный объектив 1-3 и четвертый панорамный объектив 1-4, а также сенсорный блок 1-5, содержащий первый фотоприемник в позиции 5 и второй фотоприемник в позиции 6; шариковый подшипник 1-6, блок поворота (электрический джойстик) 1-7, оправа 1-8, демодулятор команд 1-9 и мультиплексор видеосигнала 1-10, при этом фотоприемник 5 и фотоприемник 6 размещены в оправе 1-8, стыкуясь между собой обратными сторонами кристаллов, а блок поворота 1-7 по команде оператора, поступающей из сервера через демодулятор команд 1-9, обеспечивает при помощи шарикового подшипника 1-6 плавный поворот оправы 1-8 с фотоприемниками на угол 90°, а при поступлении альтернативной команды - плавный поворот в обратном направлении на тот же угол 90°, при этом выход «видео» первого фотоприемника 5 подключен к первому информационному входу мультиплексора видеосигналов 1-10, а выход «видео» второго фотоприемника 6 - ко второму информационному входу мультиплексора видеосигналов 1-9, выход которого является выходом «видео» телевизионной камеры 1.
Отметим, что блок поворота 1-7 на фиг. 1а) и на фиг. 1б) условно изображен в виде двойной фигурной стрелки.
Панорамные объективы 1-1 и 1-2 и соответственно панорамные объективы 1-3 и 1-4 предназначены для формирования оптических изображений кругового обзора для четырех противоположно расположенных шаровых слоев контролируемого пространства.
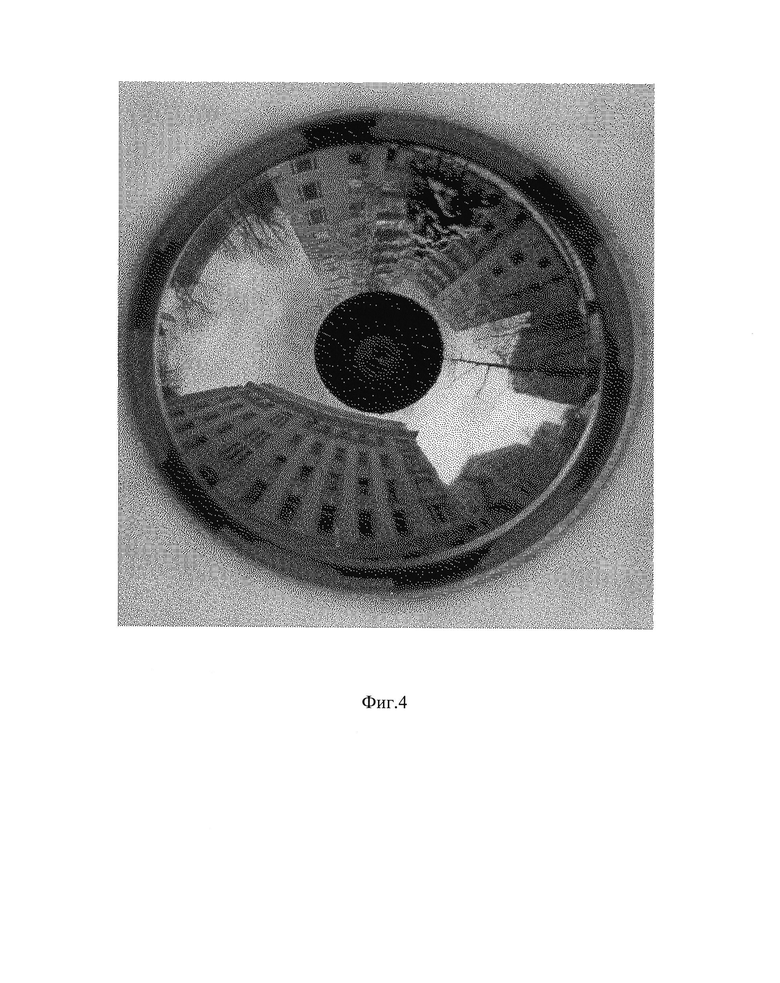
В качестве технического решения для панорамных объективов 1-1, 1-2, 1-3 и 1-4, совпадающего с аналогичным решением для прототипа [1], может быть предложен панорамный зеркально-линзовый объектив, конструкция которого запатентована в России отечественными специалистами из Московского государственного университета геодезии и картографии [2].
Фотография кольцевого изображения, формируемого панорамным объективом, представлена на фиг. 4. Угловое поле в пространстве предметов для этого объектива составляет 360 градусов по азимуту и может достигать (75-80) градусов по углу места.
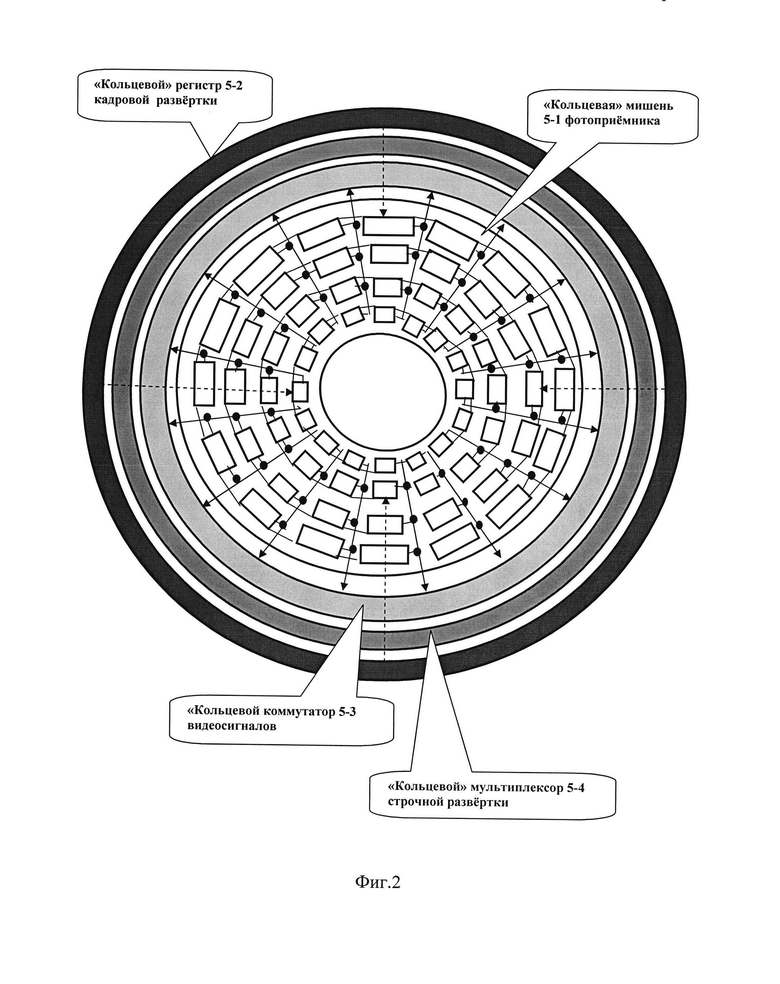
«Кольцевой» фотоприемник 5, как и «кольцевой» фотоприемник 6, (см. фиг. 2) выполнен по технологии КМОП и содержит на общем кристалле «кольцевую» фотоприемную область (мишень) 5-1 или в позиции 6-1 для фотоприемника 6; «кольцевой» регистр 5-2 кадровой развертки или в позиции 6-2 для фотоприемника 6; «кольцевой» коммутатор 5-3 видеосигналов или в позиции 6-3 для фотоприемника 6 и «кольцевой» мультиплексор 5-4 строчной развертки или в позиции 6-4 для фотоприемника 6. Отметим, что эта схемотехническая организация полностью повторяет организацию фотоприемников для прототипа [1].
Как показано на фиг. 2, активные пикселы на мишени фотоприемника объединены в столбцы, которые расположены вдоль радиальных направлений от воображаемого центра кругового кольца.
Каждый активный пиксел мишени первого фотоприемника (см. фиг. 3) имеет в своем составе светочувствительную область (площадь) 5-1-1, усилитель 5-1-2 с коэффициентом усиления Km для каждой текущей «кольцевой» строки и АЦП 5-1-3.
«Кольцевой» коммутатор 5-3 видеосигналов состоит из отдельных коммутаторов 5-3-1 видеосигнала, число которых соответствует числу активных пикселов в строке, объединенных «кольцевой» шиной видео 5-3-2.
Отметим, что показанная на фиг. 2 форма светочувствительной площади пиксела в виде прямоугольника, а на фиг. 3 - латинской буквы L, - являются условными. На практике электроды зарядового накопления активных пикселов мишени сенсора, совпадающие с площадью их светочувствительной площади, могут быть выполнены совершенно иначе, например, с геометрической формой в виде части кругового кольца.
Видеосигнал с выхода каждого АЦП 5-1-3 для каждого активного пиксела отдельного взятого «радиального» столбца передается на «радиальную» шину видео 5-1-5. Далее при помощи «своего» ключевого МОП-транзистора коммутатора 5-3-1, управляемого с одного из выходов мультиплексора 5-4, цифровой видеосигнал текущего пиксела передается на «кольцевую» шину видео 5-3-2, а затем транслируется по ней на выход фотоприемника.
То же самое формирование цифрового видеосигнала происходит и в пределах других радиально расположенных столбцов «кольцевой» мишени -6-1 фотоприемника 6.
Отметим, что на фиг. 2 пунктирные стрелки показывают управление «кольцевыми» строчными шинами 5-1-4 фотоприемника со стороны «кольцевого» регистра 5-2 кадровой развертки. То, что здесь, как и на фиг. 3, изображены лишь четыре строчные шины, является условностью чертежа. Как отмечалось выше, число шин 5-1-4 соответствует показателю действительного числа «кольцевых» строк в предлагаемом фотоприемнике.
Поясним дополнительно на фиг. 2 и другое. Стрелки с непрерывными линиями отмечают передачу сигнала изображения в сенсоре по «радиальным» шинам видео 5-1-5 в направлении к «кольцевому» коммутатору 5-3 видеосигналов.
В результате в «кольцевом» растре последовательно один за другим для каждого пиксела отдельно взятой «кольцевой» строки и последовательно строка за строкой для мишени в целом формируется в цифровом виде напряжение выходного видеосигнала фотоприемника.
Благодаря принятой для изготовления предлагаемого датчика видеосигнала технологии КМОП, обеспечивается возможность интегрировать на один общий кристалл не только фотоприемник с АЦП для каждого активного пиксела, но и блоки цифровой развертки телевизионной камеры. Реализация такого решения обеспечивает существенное снижение общего энергопотребления телевизионной камеры.
Необходимо признать, что концепция матричного (прямоугольного) фотоприемника с активным пикселом, встроенным в него АЦП и цифровым видеосигналом на выходе, который предполагалось выполнить по технологии КМОП путем реализации метода «координатная адресация», была разработана в США в «нулевые» двухтысячные годы.
Об этом сообщалось и в отечественной монографии [3, с. 67, рис. 1.21]. Однако схемотехническая организация на кристалле КМОП «кольцевого» фотоприемника с аналогичными возможностями не предлагалась.
Предлагаемая же здесь «кольцевая» форма мишени КМОП-фотоприемника и блоков развертки позволяет эффективнее использовать полезную площадь используемого кристалла для телевизионно-компьютерного наблюдения панорамных сюжетов.
Демодулятор команд 1-9 предназначен для преобразования эфирных сигналов, поступающих с сервера 2 на телевизионную камеру 1, в логические сигналы «1» или «0», передаваемые по проводам.
Шарикоподшипник 1-6 предназначен для обеспечения плавности хода оправы 1-8 с фотоприемниками, которая механически связана с блоком поворота 1-7. а точнее с поворотным якорем его нейтрального электромагнита.
Рассмотрим схему блока 1-7, которая представлена на фиг. 5. Базовую основу предлагаемого технического решения составляют две публикации в технической литературе: [4, с. 227] и [5, с. 79].
Нейтральный электромагнит содержит сердечник с обмоткой, имеющий цилиндрическую выточку, в которой помещен якорь в форме двух полуцилиндров, оси которых смещены в разные стороны относительно оси вращения. Поэтому при повороте цилиндра в направлении, указанном стрелкой, воздушный зазор между якорем и сердечником постепенно уменьшается.
Учитывая малые размеры «кольцевого» фотоприемника, даже и для оправы 1-8, содержащей два таких сенсора, тяговой характеристики электромагнита (см. [5, с. 79]), возникающей за счет увеличения магнитодвижущей силы (м.д.с.) обмотки от нуля до 1500 ампер-вольт, будет достаточно, чтобы вызвать необходимый поворот якоря на 90°.
Отметим, что такой электромагнит называют нейтральным потому, что его работа не зависит от направления тока в обмотке.
Схема включения электромагнита (см. [4, с. 227]) выполнена с использованием буферного каскада на элементе КМОП с питанием от источника 15 В, а также транзистора VT1 типа 2N4401 и транзистора VT2 типа 2N685, реализующего схему Дарлингтона с напряжением 24 В.
При высоком управляющем уровне напряжения (логической «1») на входе КМОП-буфера обеспечивается ток базы транзистора VT1 величиной 8 мА, который в свою очередь вырабатывает ток 150 мА, поступающий в базу транзистора VT2 и вызывающий полное открывание последнего. Благодаря этому, обмотка электромагнита подключается к напряжению 24 В, а якорь электромагнита поворачивается на угол 90°.
В дальнейшем при подаче альтернативной команды и появлении низкого управляющего уровня напряжения (логического «0») на входе КМОП-буфера транзисторы VT1 и VT2 закрываются, электромагнит обесточивается, а его поворотный якорь возвращается в исходное положение.
Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата (см. фиг. 1а, фиг. 1б) работает следующим образом.
Пусть телевизионная камера 1 установленная на гексакоптере и расположена на некоторой высоте относительно земли.
Будем считать, что линии связи телевизионной камеры 1 с сервером 2 компьютера 4 по видеосигналу и управлению блоком поворота реализованы в стандарте IEEE 802/11 для беспроводных сетей [6, с. 380-381]. Это означает, что передача данных осуществляется на одной из двух скоростей (1 или 2 Мбит/с) в полосе частот 2.4 ГГц.
В исходном положении управляющий сигнал с компьютера 4 на телевизионную камеру 1 не поступает, т.е. на входе блока 1-7 присутствует сигнал логического «0».
Конструкторское решение сенсорного блока 1-5 в составе телевизионной камеры 1, см. фиг. 1а), реализовано так, что ось визирования первого панорамного объектива 1-1, а, следовательно, и оптическая ось первого фотоприемника 5 направлена по горизонтали влево.
Тогда, по отношению к этому направлению, ось визирования второго панорамного объектива 1-2, а, следовательно, и оптическая ось второго фотоприемника 6 будет ориентирована по горизонтали вправо.
Отметим, что мишень первого фотоприемника 5 и мишень второго фотоприемника 6 в данной ситуации занимают положения, которые показаны линиями из квадратных точек, см. фиг. 1а).
Экспонирование «кольцевых» мишеней первого и второго фотоприемников производится непрерывно. Поэтому на первом выходе сенсорного блока 1-5 формируется цифровой видеосигнал «кольцевого» кадра от первого фотоприемника 5, а на втором выходе сенсорного блока 1-5 - цифровой видеосигнал «кольцевого» кадра от второго фотоприемника 6.
Далее выходные видеосигналы сенсорного блока 1-5 при помощи мультиплексора видеосигнала 1-10 объединяются на одну линию, чередуясь с периодом кадров Тк. Полученный мультиплексный цифровой телевизионный сигнал (мультиплексный ЦТС) «кольцевого» кадра, содержащий видеоинформацию о двух шаровых слоях (слева и справа) окружающего пространства; затем подвергается высокочастотному модулированию, становясь доступным для эфира, и поступает на выход телевизионной камеры.
Затем этот ЦТС по беспроводной сети передается на сервер 2, где (на плате видео) выполняется его демодулирование (детектирование) и демультиплексирование на два канала с последующей записью видеоинформации каждого канала соответственно в первый и второй блоки оперативной памяти на кадр.
Для получения в телевизионной камере, мультиплексного ЦТС в двух других шаровых слоях окружающего пространства без посадки гексакоптера на землю достаточно подать на блок 1-9 телевизионной камеры 1 с компьютера 4 высокий уровень управляющего сигнала (логическую «1») и, тем самым, см фиг. 1б), переключить положения мишеней первого и второго фотоприемников его сенсорного блока 1-5 на угол 90°.
Отметим, что мишень первого фотоприемника и мишень второго фотоприемника в данной ситуации будут занимать новые положения, которые также отмечены на чертеже фиг. 1б) линиями из квадратных точек, т.е. напротив третьего 1-3 и соответственно напротив четвертого 1-4 панорамных объективов.
В результате, на сервер 2 будет передаваться мультиплексный ЦТС применительно к двум другим шаровым слоям окружающего пространства (снизу и сверху соответственно), где он точно также, как и предыдущий ЦТС, подвергается сначала детектированию, а затем демультиплексированию на два канала с последующей записью каждого ЦТС соответственно в третий и четвертый блоки оперативной памяти на кадр.
Последовательное преобразование по соотношению (2) в сервере 2 каждого из четырех «кольцевых» кадров записи в «прямоугольные» кадры успешно завершает выполнение задачи последовательного мониторинга видеоинформации для всех четырех шаровых слоев окружающего пространства.
В настоящее время все элементы структурной схемы устройства компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата, см. фиг. 1а) и фиг. 1б), освоены или могут быть освоены отечественной промышленностью.
Поэтому следует считать предполагаемое изобретение соответствующим требованию о промышленной применимости.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2709459. МПК H04N 5/374, СПК H04N 5/374. Устройство компьютерной системы панорамного телевизионного наблюдения. / В.М. Смелков // Б.И. - 2019. - №35.
2. Патент РФ №2185645. МПК G02B 13/06, G02B 17/08. Панорамный зеркально-линзовый объектив. / А.В. Куртов, В.А. Соломатин // Б.И. - 2002. - №20.
3. Березин В.В., Умбиталиев А.А., Фахми Ш.С., Цыцулин А.К. и Шипилов Н.Н. Твердотельная революция в телевидении: Телевизионные системы на основе приборов с зарядовой связью, систем на кристалле и видеосистем на кристалле. Под ред. А.А. Умбиталиева и А.К. Цыцулина. - М.: «Радио и связь», 2006.
4. Ленк Дж. Электронные схемы: Практическое руководство. Пер. с англ. - «Мир», 1985.
5. Гинзбург С.А., Лехтман И.Я., Малов B.C. Основы автоматики и телемеханики. Под общ. ред. С.А. Гинзбурга. Изд. 4-е переработанное. Пер. с англ. - «Энергия», 1968.
6. Владо Дамьяновски. CCTV. Библия видеонаблюдения. Цифровые и сетевые технологии. Издание 2-е. Пер. с англ. ООО «Ай-Эс-ЭС Пресс», 2006.




Предполагаемое изобретение относится к области получения изображений и касается устройства компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата. Устройство содержит телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети. В состав телевизионной камеры входят четыре панорамных объектива, два фотоприемника, которые имеют форму кругового кольца, оправа и блок поворота. Фотоприемники размещены в оправе и состыкованы между собой обратными сторонами кристаллов. Блок поворота механически связан с оправой и предназначен для ее углового перемещения на 90° по команде, поступающей в телевизионную камеру. В исходном положении первый объектив оптически связан с мишенью первого фотоприемника, а второй панорамный объектив с мишенью второго фотоприемника. При повороте оправы на 90° мишень первого фотоприемника устанавливается напротив третьего объектива, а мишень второго фотоприемника напротив четвертого объектива. Технический результат заключается в сокращении количества фотоприемников и устранении потерь пикселов в сенсорах при сохранении для беспилотного летательного аппарата возможности мониторинга видеоинформации панорамного сюжета в четырех слоях окружающего пространства в беспосадочном режиме. 1 з.п. ф-лы, 6 ил.
1. Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата, содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив; а также сенсорный блок, содержащий первый фотоприемник и второй фотоприемник, которые имеют форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью первого фотоприемника, а второй панорамный объектив - с мишенью второго фотоприемника; причем каждый из двух фотоприемников сенсорного блока выполнен на кристалле, изготовленном по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП), причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Кm, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки сенсора, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео - число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению:

где Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей «кольцевой» строки считывания в «кольцевом» сенсоре, К1 - коэффициент усиления активного пиксела его первой «кольцевой» строки,
при этом выход первого фотоприемника сенсорного блока подключен к первому информационному входу мультиплексора видеосигнала, а выход второго фотоприемника - ко второму информационному входу мультиплексора видеосигнала, выход которого является выходом «видео» телевизионной камеры; на материнской плате сервера установлена плата видео, выполняющая демультиплексирование входного цифрового телевизионного сигнала на два канала с последующей записью каждого из «кольцевых» видеосигналов соответственно в первый и второй блоки оперативной памяти сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению:

где  - горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем, отличающееся тем, что мультиплексор видеосигнала телевизионной камеры выполняет дополнительно высокочастотное модулирование цифрового телевизионного сигнала для осуществления его беспроводной передачи на сервер, а в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и оба фотоприемника, которые стыкуются между собой обратными сторонами кристаллов; блок поворота, который механически связан с оправой и предназначен для выполнения ее углового перемещения на 90° в пределах внутреннего пространства телевизионной камеры, а также демодулятор высокочастотных управляющих команд оператора системы для блока поворота, транслируемых по беспроводной линии связи от сервера на телевизионную камеру, при этом в беспосадочном режиме работы летательного аппарата по команде, поступающей в телевизионную камеру с компьютера оператора системы, осуществляется при помощи шарикового подшипника плавный пространственный поворот оправы на угол 90°, так что мишень первого фотоприемника устанавливается в положение напротив третьего панорамного объектива, а мишень второго фотоприемника - в положение напротив четвертого панорамного объектива, а если оператором системы будет подана на телевизионную камеру альтернативная команда, то оправа с фотоприемниками возвращается в исходное положение, причем величина коэффициента усиления активного пиксела K1 для первой строки каждого из двух фотоприемников сенсорного блока телевизионной камеры может быть равна единице или больше ее, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения в режиме организации ручной или автоматической регулировки чувствительности фотоприемников в зависимости от освещенности объектов наблюдения панорамного сюжета; при этом плата видео, размещенная на материнской плате сервера, выполняет высокочастотное модулирование команд управления телевизионной камерой, демодулирование входного цифрового телевизионного сигнала, а также демультиплексирование нового цифрового сигнала на два дополнительных канала с последующей записью каждого из «кольцевых» видеосигналов соответственно в третий и четвертый блоки оперативной памяти сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению (2), а в качестве сервера используется системный блок компьютера оператора системы.
- горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем, отличающееся тем, что мультиплексор видеосигнала телевизионной камеры выполняет дополнительно высокочастотное модулирование цифрового телевизионного сигнала для осуществления его беспроводной передачи на сервер, а в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и оба фотоприемника, которые стыкуются между собой обратными сторонами кристаллов; блок поворота, который механически связан с оправой и предназначен для выполнения ее углового перемещения на 90° в пределах внутреннего пространства телевизионной камеры, а также демодулятор высокочастотных управляющих команд оператора системы для блока поворота, транслируемых по беспроводной линии связи от сервера на телевизионную камеру, при этом в беспосадочном режиме работы летательного аппарата по команде, поступающей в телевизионную камеру с компьютера оператора системы, осуществляется при помощи шарикового подшипника плавный пространственный поворот оправы на угол 90°, так что мишень первого фотоприемника устанавливается в положение напротив третьего панорамного объектива, а мишень второго фотоприемника - в положение напротив четвертого панорамного объектива, а если оператором системы будет подана на телевизионную камеру альтернативная команда, то оправа с фотоприемниками возвращается в исходное положение, причем величина коэффициента усиления активного пиксела K1 для первой строки каждого из двух фотоприемников сенсорного блока телевизионной камеры может быть равна единице или больше ее, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения в режиме организации ручной или автоматической регулировки чувствительности фотоприемников в зависимости от освещенности объектов наблюдения панорамного сюжета; при этом плата видео, размещенная на материнской плате сервера, выполняет высокочастотное модулирование команд управления телевизионной камерой, демодулирование входного цифрового телевизионного сигнала, а также демультиплексирование нового цифрового сигнала на два дополнительных канала с последующей записью каждого из «кольцевых» видеосигналов соответственно в третий и четвертый блоки оперативной памяти сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению (2), а в качестве сервера используется системный блок компьютера оператора системы.
2. Устройство компьютерной системы панорамного телевизионного наблюдения по п. 1, отличающееся тем, что в фотоприемниках сенсорного блока телевизионной камеры электроды зарядового накопления, совпадающие с площадью их светочувствительной площади, выполнены с геометрической формой в виде части кругового кольца.
| Устройство компьютерной системы панорамного телевизионного наблюдения | 2019 |
|
RU2709459C1 |
| WO 2014093942 A1, 19.06.2014 | |||
| US 20140253678 A1, 11.09.2014 | |||
| JP 2018013949 A, 25.01.2018. | |||
