Предполагаемое изобретение относится к панорамному телевизионному наблюдению, которое выполняется компьютерной системой при помощи телевизионной камеры, обеспечивающей последовательно круговой обзор в четырех шаровых слоях окружающей сферической области пространства. При этом для каждого из этих шаровых слоев телевизионный контроль ситуации в реальном масштабе времени осуществляется в пространственном угле 360 градусов по азимуту и десятки градусов по углу места. Сенсорный блок этой телевизионной камеры состоит из изготовленного по технологии комплементарных структур «металл-окисел- полупроводник» (КМОП) одного (единственного) фотоприемника, который имеет форму мишени в виде кругового кольца.
Наиболее близким по технической сущности к заявляемому изобретению следует считать устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата [1], содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив, четвертый панорамный объектив; а также сенсорный блок, содержащий первый фотоприемник и второй фотоприемник, которые имеют форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью первого фотоприемника, второй панорамный объектив - с мишенью второго фотоприемника, причем каждый из двух фотоприемников сенсорного блока выполнен на кристалле, изготовленном по технологии КМОП, причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки фотоприемника, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео-число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению:

где Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей «кольцевой» строки считывания в «кольцевом» сенсоре, a K1 - коэффициент усиления активного пиксела первой «кольцевой» строки с величиной показателя равной единице, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения,
причем на кристаллах обоих фотоприемников сенсорного блока имеется разрез (сквозной шлиц), выполненный в радиальном направлении от воображаемого центра кольца к его внешней периферии, в расположение между первым и последним пикселами первой «кольцевой строки, при этом первый фотоприемник установлен в консольное соединение со вторым фотоприемником в шлиц под углом 90°, при этом выход первого фотоприемника сенсорного блока подключен к первому информационному входу мультиплексора-модулятора, а выход второго фотоприемника - ко второму информационному входу мультиплексора-модулятора, выход которого является выходом «видео» телевизионной камеры; при этом в состав телевизионной камеры входят шариковый подшипник, устанавливаемый в пространстве, которое состоит из свободной от пикселов области первого и второго фотоприемников, и демодулятор команд оператора, при этом в беспосадочном режиме летательного аппарата по командам, поступающим в телевизионную камеру с компьютера оператора системы, обеспечивается последовательно пространственное перемещение этих фотоприемников при помощи первого и второго блоков поворота якоря электромагнита, устанавливаемых на внешней периферии первого и второго фотоприемников соответственно, причем первый блок поворота реализует пространственный поворот первого фотоприемника на угол 180°, а второй блок поворота реализует пространственный поворот на угол 180° второго фотоприемника, так что мишень первого фотоприемника устанавливается симметрично в положение напротив третьего панорамного объектива, а мишень второго фотоприемника - симметрично в положение напротив четвертого панорамного объектива, при этом плата видео, размещенная на материнской плате сервера, выполняет демодуляцию нового входного цифрового телевизионного сигнала и его демультиплексирование на два дополнительных канала с последующей записью каждого из «кольцевых» видеосигналов в соответствующую оперативную память сервера и последовательное преобразование каждого из «кольцевых» кадров записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению:

где  - горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем.
- горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем.
Как отмечалось в описании изобретения [1], устройство прототипа может быть установлено в беспилотном летательном аппарате в качестве которого предлагался гексакоптер. Термином «гексакоптер» принято называть в технической литературе радиоуправляемую модель беспилотного летательного аппарата с шестью крыльями, предназначенного для выполнения аэровидео съемки местности.
Очевидно, что мультиплексор-модулятор телевизионной камеры прототипа [1] следует рассматривать как два последовательно соединенных между собой блока, а именно: мультиплексора и модулятора.
Недостаток прототипа - неизбежные потери светочувствительных элементов обоих фотоприемников телевизионной камеры, возникающих за счет консольного соединения их между собой путем разреза по методу сквозного шлица.
Задачей изобретения является принципиальное устранение неизбежных потерь светочувствительных элементов в телевизионной камере путем использования одного (единственного) фотоприемника, исключая необходимость в его разрезе по методу сквозного шлица, при сохранении для беспилотного летательного аппарата возможности мониторинга видеоинформации панорамного сюжета в четырех слоях окружающего пространства в беспосадочном режиме.
Поставленная задача в заявляемом устройстве системы панорамного телевизионного наблюдения для беспилотного летательного аппарата решается тем, что, как и в устройстве прототипа [1], содержащем последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив; а также сенсорный блок, содержащий фотоприемник, который имеет форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью фотоприемника, а сам он выполнен на кристалле, изготовленном по технологии КМОП, причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный АЦП, обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки фотоприемника, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео-число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению (1), обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения, при этом выход фотоприемника сенсорного блока подключен к информационному входу модулятора цифрового телевизионного сигнала, выход которого является выходом «видео» телевизионной камеры, в состав которой входят также блок поворота и демодулятор команд оператора, выполняющий электромеханическое управление блоком поворота с компьютера сервера, при этом на материнской плате сервера установлена плата видео, выполняющая демодуляцию входного цифрового телевизионного сигнала с последующей записью «кольцевого» видеосигнала в соответствующую ячейку оперативной памяти сервера и последовательное преобразование «кольцевого» кадра записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению (2); но при этом, в отличие от прототипа [1], в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и фотоприемник, а блок поворота выполнен на базе шагового двигателя, вал которого непосредственно или через редуктор механически связан с оправой, обеспечивая по команде оператора с компьютера пространственный поворот оправы фотоприемника на угол 90° в пошаговом режиме четыре раза за цикл, так что его мишень, установленная по умолчанию симметрично в положение напротив первого панорамного объектива, последовательно устанавливается сначала симметрично в положение напротив второго панорамного объектива, затем симметрично в положение напротив третьего панорамного объектива, а в заключении - симметрично в положение напротив четвертого панорамного объектива, а если оператором компьютера будут подаваться на телевизионную камеру альтернативные (противоположные команды), то оправа с фотоприемником будет последовательно и пошагово возвращаться назад в начальное (исходное) положение, причем величина коэффициента усиления активного пиксела K1 для первой строки фотоприемника сенсорного блока телевизионной камеры может быть равна единице или быть больше ее, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения в режиме организации ручной или автоматической регулировки чувствительности фотоприемника в зависимости от освещенности объектов панорамного сюжета, при этом новый цифровой видеосигнал, формируемый в телевизионной камере после завершения каждого из четырех поворотов фотоприемника, поочередно записывается в соответствующую ячейку оперативной памяти сервера, в качестве которого используется системный блок компьютера оператора системы.
Совокупность известных и новых признаков для заявляемого устройства не известна из уровня техники, следовательно, предлагаемое техническое решение соответствует критерию новизны.
Важно отметить следующее. Светочувствительная площадь пикселов «кольцевой» мишени фотоприемника сенсорного блока, как и для прототипа [1], от строки к строке различна. Это вызывается необходимостью для «кольцевого» фотоприемника, имеющего одинаковое число пикселов в каждой строке, выравнивания разрешающей способности в пределах кадра путем обеспечения одинаковой величины технологического зазора между светочувствительными элементами вдоль каждой «кольцевой» строки.
Но при этом в заявляемом решении, как и в прототипе [1], не происходит межстрочного нарушения чувствительности сенсора по следующим обстоятельствам.
Параметр считывающей апертуры для всех пикселов каждой текущей строки «кольцевого» кадра определяется произведением коэффициента усиления Km пиксела на величину его светочувствительной площади Δm.
Как следует из соотношения (1), этот показатель остается постоянным (неизменным) для всех светочувствительных пикселов фотоприемника.
Не меняется и величина шумовой «дорожки» для каждого активного пиксела фотоприемника, что является обязательным условием реализации его высоких показателей по чувствительности и отношению сигнал/шум.
Поэтому предлагаемое техническое решение соответствует критерию о наличии изобретательского уровня.
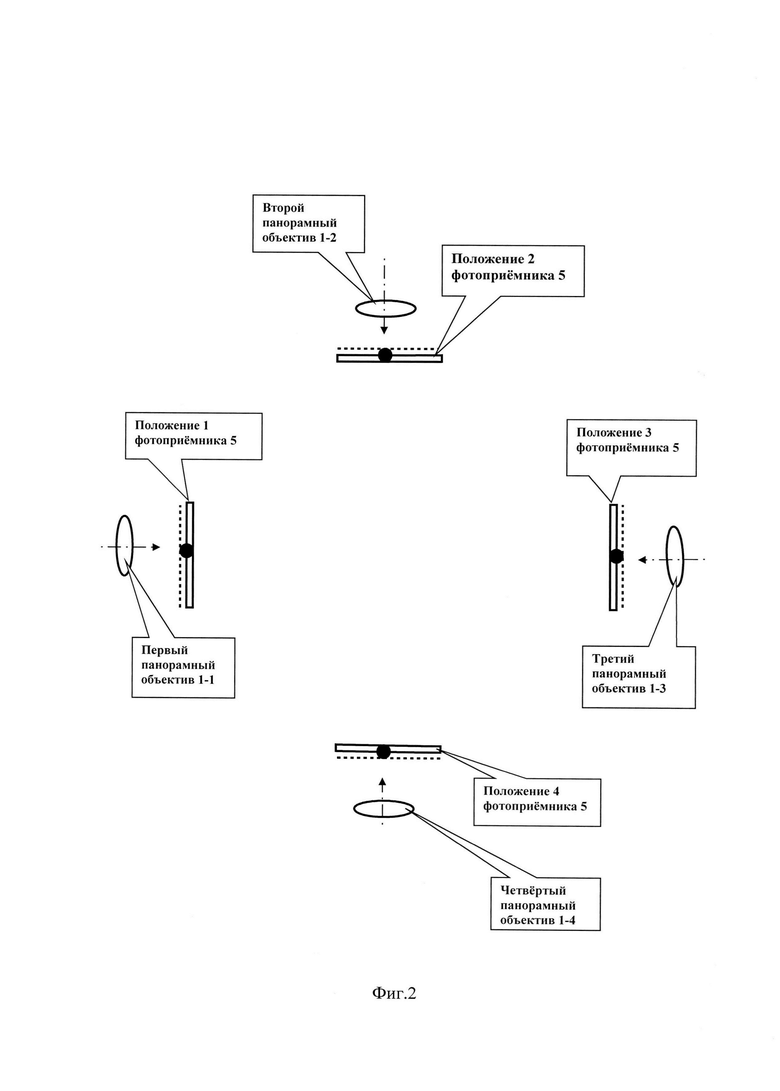
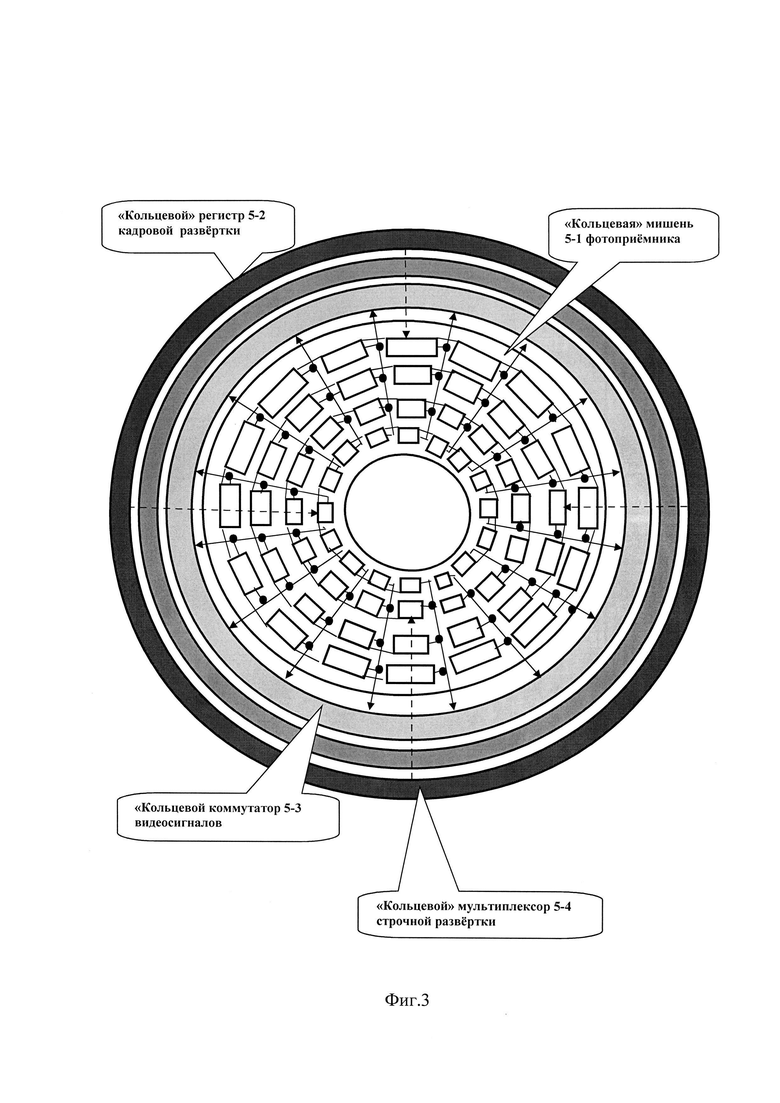
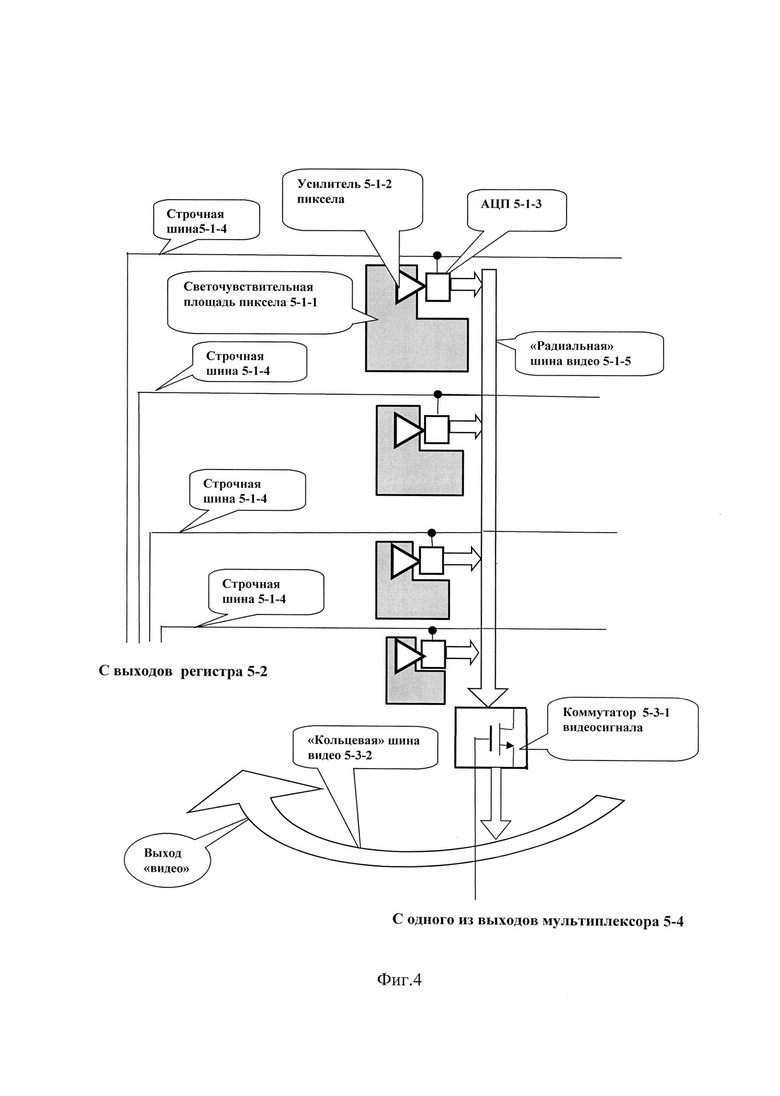
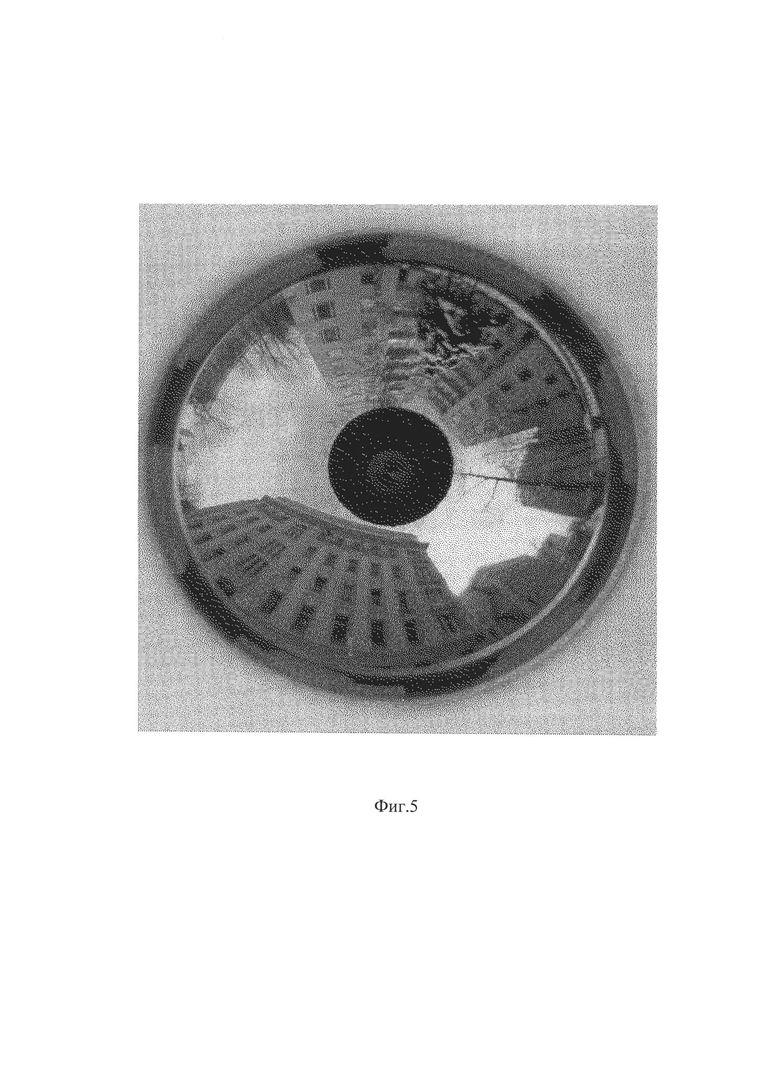
На фиг. 1 приведена структурная схема заявляемой компьютерной системы панорамного телевизионного наблюдения и на этом же чертеже - структурная схема телевизионной камеры в ее составе, когда фотоприемник занимает такое положение, которое обеспечивает ведение мониторинга окружающего пространства в его слое слева; на фиг. 2 показаны все четыре возможные положения фотоприемника телевизионной камеры, реализующие мониторинг окружающего пространства последовательно в четырех слоях: слева, сверху, справа и снизу; на фиг. 3 приведена схемотехническая организация «кольцевого» фотоприемника; на фиг. 4 - подробности этой организации применительно к отдельно взятому «радиальному» столбцу; на фиг. 5, по данным [2], представлена фотография изображения, полученного при помощи панорамного объектива; на фиг. 6 - приведена иллюстрация принципа действия шагового двигателя, который используется в составе телевизионной камеры.
Устройство компьютерной системы панорамного телевизионного наблюдения, см. фиг. 1, содержит последовательно соединенные телевизионную камеру 1 и сервер 2 (с установленной в нем платой видео), являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров в позиции 3, при этом в состав телевизионной камеры 1 входит первый панорамный объектив 1-1, второй панорамный объектив 1-2, третий панорамный объектив 1-3 и четвертый панорамный объектив 1-4, а также сенсорный блок 1-5, содержащий фотоприемник в позиции 5, шарикоподшипник 1-6, оправу фотоприемника в позици 1-7, а также блок поворота 1-8, который по команде, поступающей из сервера 2 через демодулятор 1-9, выполняет плавный поворот оправы 1-7 по часовой стрелке на угол 90° за одно дискретное перемещение (шаг) вала шагового двигателя, при этом выход «видео» фотоприемника сенсорного блока 1-5 подключен к модулятору телевизионного сигнала 1-10, выход которого является выходом «видео» телевизионной камеры 1.
Панорамные объективы 1-1, 1-2, 1-3 и 1-4 предназначены для формирования оптических изображений кругового обзора последовательно для четырех шаровых слоев контролируемого пространства слева, сверху, справа и снизу, соответствующих направлению взгляда телевизионного оператора, как показано на фиг. 2.
С другой стороны, блок поворота 1-8 может выполнять свои функциональные обязанности, обеспечивая для оператора последовательный мониторинг кругового обзора шаровых слоев наблюдаемого пространства соответственно слева, сзади, справа и спереди.
В качестве технического решения для панорамных объективов 1-1, 1-2, 1-3 и 1-4, совпадающего с аналогичным решением для прототипа [1], может быть предложен панорамный зеркально-линзовый объектив, конструкция которого запатентована в России отечественными специалистами из Московского государственного университета геодезии и картографии [2].
Фотография кольцевого изображения, формируемого панорамным объективом, представлена на фиг. 5. Угловое поле в пространстве предметов для этого объектива составляет 360 градусов по азимуту и может достигать (75-80) градусов по углу места.
«Кольцевой» фотоприемник 5 (см. фиг. 3) выполнен по технологии КМОП и содержит на общем кристалле «кольцевую» фотоприемную область (мишень) 5-1, «кольцевой» регистр 5-2 кадровой развертки, «кольцевой» коммутатор 5-3 видеосигналов и «кольцевой» мультиплексор 5-4.
Как показано на фиг. 3, активные пикселы на мишени фотоприемника объединены в столбцы, которые расположены вдоль радиальных направлений от воображаемого центра кругового кольца.
Каждый активный пиксел мишени (см. фиг. 4) имеет в своем составе светочувствительную область (площадь) 5-1-1, усилитель 5-1-2 с коэффициентом усиления Km для каждой текущей «кольцевой» строки и АЦП 5-1-3.
«Кольцевой» коммутатор 5-3 видеосигналов состоит из отдельных коммутаторов 5-3-1 видеосигнала, число которых соответствует числу активных пикселов в строке, объединенных «кольцевой» шиной видео 5-3-2.
Отметим, что показанная на фиг. 3 форма светочувствительной площади пиксела в виде прямоугольника, а на фиг. 4 - латинской буквы L, - являются условными. На практике электроды зарядового накопления активных пикселов мишени сенсора, совпадающие с площадью их светочувствительной площади, могут быть выполнены совершенно иначе, например, с геометрической формой в виде части кругового кольца.
Видеосигнал с выхода каждого АЦП 5-1-3 для каждого активного пиксела отдельного взятого «радиального» столбца передается на «радиальную» шину видео 5-1-5. Далее при помощи «своего» ключевого МОП-транзистора коммутатора 5-3-1, управляемого с одного из выходов мультиплексора 5-4, цифровой видеосигнал текущего пиксела передается на «кольцевую» шину видео 5-3-2, а затем транслируется по ней на выход фотоприемника.
Отметим, что на фиг. 3 пунктирные стрелки показывают управление «кольцевыми» строчными шинами 5-1-4 фотоприемника со стороны «кольцевого» регистра 5-2 кадровой развертки. То, что здесь, как и на фиг. 4, изображены лишь четыре строчные шины является условностью чертежа. Как отмечалось выше, число шин 5-1-4 соответствует показателю действительного числа «кольцевых» строк в предлагаемом фотоприемнике.
Поясним дополнительно на фиг. 3 и другое. Стрелки с непрерывными линиями отмечают передачу сигнала изображения в сенсоре по «радиальным» шинам видео 5-1-5 в направлении к «кольцевому» коммутатору 5-3 видеосигналов.
В результате в «кольцевом» растре последовательно один за другим для каждого пиксела отдельно взятой «кольцевой» строки и последовательно строка за строкой для мишени в целом формируется в цифровом виде напряжение выходного видеосигнала фотоприемника.
Благодаря принятой для изготовления предлагаемого датчика видеосигнала технологии КМОП, обеспечивается возможность интегрировать на один общий кристалл не только фотоприемник с АЦП для каждого активного пиксела, но и блоки цифровой развертки телевизионной камеры. Реализация такого решения обеспечивает существенное снижение общего энергопотребления телевизионной камеры.
Необходимо признать, что концепция матричного (прямоугольного) фотоприемника с активным пикселом, встроенным в него АЦП и цифровым видеосигналом на выходе, который предполагалось выполнить по технологии КМОП путем реализации метода «координатная адресация», была разработана американскими специалистами в «нулевые» двухтысячные годы. Об этом сообщалось и в отечественной монографии [3, с. 67, рис. 1.21]. Однако схемотехническая организация на кристалле КМОП «кольцевого» фотоприемника с аналогичными возможностями там не упоминалась.
Предлагаемая же здесь «кольцевая» форма мишени КМОП- фотоприемника и блоков развертки позволяет эффективнее использовать полезную площадь используемого кристалла для телевизионнокомпьютерного наблюдения панорамных сюжетов.
Демодулятор команд оператора 1-9 предназначен для преобразования эфирных цифровых сигналов, поступающих с сервера 2 на телевизионную камеру 1, в логические сигналы «1» или «О», передаваемые по проводам.
Модулятор телевизионного сигнала 1-10 служит для преобразования выходного видеосигнала телевизионной камеры в форму, необходимую для передачи его по эфирному каналу (беспроводной сети).
Очевидно, что благодаря технологии КМОП, модулятор 1-10 может быть выполнен в составе фотоприемника сенсорного блока 1-5.
Шарикоподшипник 1-6 предназначен для обеспечения плавности хода оправы 1-7 с фотоприемником, которая механически связана с блоком поворота 1-8.
Блок поворота 1-8 выполнен на базе шагового двигателя, который представляет собой электрическую машину, предназначенную для преобразования электрической энергии в механическую энергию, см. например, монографию [4, с. 95] и публикацию интернете [5].
Конструктивно шаговый двигатель состоит из обмоток статора и магнитно мягкого или магнитно твердого ротора.
Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Очевидно, что при конструктивной необходимости шаговый двигатель может быть оснащен редуктором.
Принцип действия шагового двигателя, применяемого в блоке поворота 1-8 заявляемого устройства, показан на фиг.6. На этом чертеже изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90° относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90°.
В момент подачи высокого уровня импульсного напряжения U1 в первую обмотку происходит перемещение ротора на эти 90°. В случае поочередной подачи высокого уровня импульсного напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки статора шагового двигателя.
Для подачи потенциала на обмотки на обмотки шагового двигателя необходим механизм, способный выдать управляющий импульс или группу импульсов в конкретной последовательности. В роли такого механизма выступает блок управления шаговым двигателем, который содержит драйвер на основе микропроцессора, а также контроллер, обеспечивающий непосредственное подключение цифровых сигналов к данному двигателю.
Очевидно, что в заявляемом устройстве компьютерной системы блок поворота 1-8 телевизионной камеры содержит последователь соединенные между собой шаговый двигатель, обеспечивающий четыре фиксированных положения вала под углом 90°, и блок управления шаговым двигателем, вход которого может быть подключен через USB интерфейс к внешнему блоку цифрового управления (со стороны компьютера 4).
Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата (см. фиг. 1) работает следующим образом.
Пусть телевизионная камера 1 установленная на гексакоптере и расположена на некоторой высоте относительно Земли.
Будем считать, что линии связи телевизионной камеры 1 с компьютером 4 оператора системы по видеосигналу и управлению реализованы в стандарте IEEE 802/11 для беспроводных сетей [6, с. 380-381]. Это означает, что передача данных осуществляется на одной из двух скоростей (1 или 2 Мбит/с) в полосе частот 2.4 ГГц.
Пусть конструкторское решение сенсорного блока 1-5 в составе телевизионной камеры 1, см. фиг. 1 и фиг. 2 реализовано так, что в исходном положении 1 ось визирования первого панорамного объектива 1-1, а, следовательно, и оптическая ось фотоприемника 5 направлена по горизонтали влево. Отметим, что мишень фотоприемника 5 занимает в данной ситуации положение, которое показано линиями из квадратных точек.
Экспонирование «кольцевой» мишени фотоприемника 5 производится непрерывно. Поэтому на выходе сенсорного блока 1-5 формируется цифровой видеосигнал «кольцевого» кадра фотоприемника 5.
Полученный цифровой телевизионный сигнал (ЦТС), содержащий видеоинформацию о шаровом слое слева для окружающего пространства затем подвергается высокочастотному модулированию в блоке 1-10, становясь доступным для эфира, и поступает на выход телевизионной камеры 1.
Затем этот ЦТС по беспроводной сети передается на сервер 2, где (на плате видео) выполняется его демодуляция с последующей записью видеоинформации в первый блок оперативной памяти на кадр.
Для получения в телевизионной камере 1 ЦТС применительно к трем другим шаровым слоям окружающего пространства без посадки гексакоптера на Землю достаточно подавать с компьютера 4 необходимые команды (в ручном или автоматическом режимах) обеспечивающих последовательно поворот фотоприемника 5 (по часовой стрелке) на угол 90° при помощи шагового двигателя блока 1-8.
В результате мишень фотоприемника 5 сначала оказывается в положении 2 напротив второго панорамного объектива 1-2, затем в положении 3 - напротив третьего панорамного объектива 1-3, а в завершении цикла - напротив четвертого панорамного объектива 1-4.
Как и первый ЦТС, каждый из трех новых ЦТС последовательно будет подвержен высокочастотному модулированию (детектированию) в блоке 1-10 телевизионной камеры, а затем в сервере 2 - демодуляции видеосигнала и и его последующей записи соответственно во второй, третий и четвертый блок оперативной памяти на кадр.
Последовательное преобразование по соотношению (2) в сервере 2 каждого из четырех «кольцевых» кадра записи в «прямоугольные» кадры успешно завершает выполнение задачи последовательного мониторинга видеоинформации для четырех шаровых слоев окружающего пространства (слева, сверху, справа и снизу).
В настоящее время все элементы структурной схемы устройства компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата, см. фиг. 1 освоены или могут быть освоены отечественной промышленностью.
Поэтому следует считать предполагаемое изобретение соответствующим требованию о промышленной применимости.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2780801. МПК H04N 5/225. СПК H04N 5/2251; H04N 5/2258; H04N 5/2259; H04N 5/23203. Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата. / В.М. Смелков // Б.И. - 2022. - №28.
2. Патент РФ №2185645. МПК G02B 13/06, G02B 17/08. Панорамный зеркально-линзовый объектив. / А.В. Куртов, В.А. Соломатин // Б.И. - 2002. - №20.
3. Березин В.В., Умбиталиев А.А., Фахми Ш.С., Цыцулин А.К. и Шипилов Н.Н. Твердотельная революция в телевидении: Телевизионные системы на основе приборов с зарядовой связью, систем на кристалле и видеосистем на кристалле. Под ред. А.А. Умбиталиева и А.К. Цыцулина. - М.: «Радио и связь», 2006.
4. Гинзбург С.А., Лехтман И.Я., Малов B.C. Основы автоматики и телемеханики. Под общ. ред. С.А. Гинзбурга. Изд. 4-е переработанное. Пер. с англ. - «Энергия», 1968.
5. https//www.asutpp.ru/shagovyy-dvigatel.html
6. Владо Дамьяновски. CCTV. Библия видеонаблюдения. Цифровые и сетевые технологии. Издание 2-е. Пер. с англ. ООО «Ай -Эс-ЭС Пресс», 2006.


Изобретение относится к панорамному телевизионному наблюдению, которое выполняется компьютерной системой при помощи телевизионной камеры, обеспечивающей последовательно круговой обзор в четырех шаровых слоях окружающей сферической области пространства. Для каждого из этих шаровых слоев телевизионный контроль ситуации в реальном масштабе времени осуществляется в пространственном угле 360 градусов по азимуту и десятки градусов по углу места. Сенсорный блок телевизионной камеры состоит из изготовленного по технологии комплементарных структур «металл-окисел-полупроводник» одного единственного фотоприемника, который имеет форму мишени в виде кругового кольца. Технический результат - устранение потерь светочувствительных элементов в телевизионной камере с обеспечением возможности мониторинга видеоинформации панорамного сюжета в четырех слоях окружающего пространства в беспосадочном режиме. 1 з.п. ф-лы, 6 ил.
1. Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата, содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в состав телевизионной камеры входит первый панорамный объектив, второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив; а также сенсорный блок, содержащий фотоприемник, который имеет форму кругового кольца, причем первый панорамный объектив оптически связан с мишенью фотоприемника, а сам он выполнен на кристалле, изготовленном по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП), причем его мишень состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки фотоприемника, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в фотоприемнике, а количество «радиальных» шин видео-число пикселов в каждой строке фотоприемника, при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «видео» фотоприемника, причем коэффициент усиления Кm активного пиксела для каждой текущей «кольцевой» строки фотоприемника изменяется по соотношению:

где Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей «кольцевой» строки считывания в «кольцевом» сенсоре, a K1 - коэффициент усиления активного пиксела первой «кольцевой» строки с величиной показателя равной единице, обеспечивая одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения, при этом выход фотоприемника сенсорного блока подключен к информационному входу модулятора цифрового телевизионного сигнала, выход которого является выходом «видео» телевизионной камеры, в состав которой входят также блок поворота и демодулятор команд оператора, выполняющий электромеханическое управление блоком поворота с компьютера сервера, при этом на материнской плате сервера установлена плата видео, выполняющая демодуляцию входного цифрового телевизионного сигнала с последующей записью «кольцевого» видеосигнала в соответствующую ячейку оперативной памяти сервера и последовательное преобразование «кольцевого» кадра записи в «прямоугольные» кадры, причем число «прямоугольных» кадров n, соответствующих одному текущему «кольцевому» кадру, удовлетворяет соотношению:

где  - горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем, отличающееся тем, что в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и указанный фотоприемник, а блок поворота сенсорного блока телевизионной камеры содержит последовательно соединенные между собой шаговый двигатель и блок управления шаговым двигателем, вход которого подключен к выходу демодулятора команд оператора, причем вал шагового двигателя непосредственно или через редуктор механически связан с оправой фотоприемника, обеспечивая по команде оператора с компьютера пространственный поворот оправы фотоприемника на угол 90° в пошаговом режиме четыре раза за цикл, так что его мишень, установленная по умолчанию симметрично в положение напротив первого панорамного объектива, последовательно устанавливается сначала симметрично в положение напротив второго панорамного объектива, затем симметрично в положение напротив третьего панорамного объектива, а в заключении - симметрично в положение напротив четвертого панорамного объектива, при этом новый цифровой видеосигнал, формируемый в телевизионной камере после завершения каждого из четырех поворотов фотоприемника, поочередно записывается в соответствующую ячейку оперативной памяти сервера, в качестве которого используется системный блок компьютера оператора системы.
- горизонтальный угол поля зрения в градусах наблюдаемого оператором изображения, а само это преобразование выполняется программным путем, отличающееся тем, что в телевизионную камеру введена оправа, в которой размещаются шариковый подшипник и указанный фотоприемник, а блок поворота сенсорного блока телевизионной камеры содержит последовательно соединенные между собой шаговый двигатель и блок управления шаговым двигателем, вход которого подключен к выходу демодулятора команд оператора, причем вал шагового двигателя непосредственно или через редуктор механически связан с оправой фотоприемника, обеспечивая по команде оператора с компьютера пространственный поворот оправы фотоприемника на угол 90° в пошаговом режиме четыре раза за цикл, так что его мишень, установленная по умолчанию симметрично в положение напротив первого панорамного объектива, последовательно устанавливается сначала симметрично в положение напротив второго панорамного объектива, затем симметрично в положение напротив третьего панорамного объектива, а в заключении - симметрично в положение напротив четвертого панорамного объектива, при этом новый цифровой видеосигнал, формируемый в телевизионной камере после завершения каждого из четырех поворотов фотоприемника, поочередно записывается в соответствующую ячейку оперативной памяти сервера, в качестве которого используется системный блок компьютера оператора системы.
2. Устройство компьютерной системы панорамного телевизионного наблюдения по п. 1, отличающееся тем, что в фотоприемнике сенсорного блока телевизионной камеры электроды зарядового накопления активных пикселов мишени, совпадающие с площадью их светочувствительной площади, выполнены с геометрической формой в виде части кругового кольца.
| Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата | 2021 |
|
RU2780801C1 |
| WO 2016101155 A1, 30.06.2016 | |||
| US 10084960 B2, 25.09.2018 | |||
| US 5790183 A, 04.08.1998. | |||

